AMCOM MK66 Final Presentation Filiz Genca Ashley Devoto Jeff Kohlhoff Matt Galante Jason Newquist...
17
AMCOM MK66 AMCOM MK66 Final Presentation Final Presentation Filiz Genca Filiz Genca Ashley Devoto Ashley Devoto Jeff Kohlhoff Jeff Kohlhoff Matt Galante Matt Galante Jason Newquist Jason Newquist Adrian Lauf Adrian Lauf Shannon Shannon Stonemetz Stonemetz
-
Upload
judith-robbins -
Category
Documents
-
view
220 -
download
0
Transcript of AMCOM MK66 Final Presentation Filiz Genca Ashley Devoto Jeff Kohlhoff Matt Galante Jason Newquist...

AMCOM MK66AMCOM MK66
Final PresentationFinal PresentationFiliz GencaFiliz Genca Ashley Devoto Ashley DevotoJeff KohlhoffJeff Kohlhoff Matt Galante Matt GalanteJason NewquistJason Newquist Adrian Lauf Adrian Lauf
Shannon StonemetzShannon Stonemetz

Project OverviewProject Overview Development of a precision guidance Development of a precision guidance
avionics module for the Hydra 70 rocket avionics module for the Hydra 70 rocket missile.missile.• M261 MPSM warheadM261 MPSM warhead• M261 19-round launch platformM261 19-round launch platform• MK 66 rocket motorMK 66 rocket motor
Module will have built in IMU and GPS Module will have built in IMU and GPS guidance systemsguidance systems
Module will contain 4 canards actuated by Module will contain 4 canards actuated by servo motors that will perform flight servo motors that will perform flight adjustmentsadjustments
Manufacture a mechanical prototypeManufacture a mechanical prototype

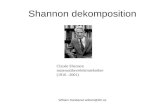
Software Block DiagramSoftware Block Diagram
Data Handler
IMU DataProcessing SW
GPS DataProcessing SW
RMS ControlSoftware
Serial I/OControl Routines
ParallelControl
Servo Lines,Deploy Line
Course Plot/Correction
RS-232 Devices:(IMU, GPS, RMS)
RollCompensation

GPS InterfacingGPS Interfacing
Outputs raw data (real-time data)Outputs raw data (real-time data)• Binary formatBinary format• Transmission ProtocolTransmission Protocol
8 bits8 bits 1 stop bit1 stop bit No parity bitNo parity bit
Output IntervalOutput Interval• Can be set to any time between .05 and Can be set to any time between .05 and
999 seconds999 seconds

IMU SpecificationsIMU Specifications
Honeywell HG1930 Honeywell HG1930 Gun-Hard MEMS Gun-Hard MEMS IMUIMU• RS422 interfaceRS422 interface
Must be converted Must be converted to 232to 232
• Synchronous or Synchronous or AsynchronousAsynchronous
• OutputOutput Linear AccelerationLinear Acceleration Angular accelerationAngular acceleration

Correction sequenceCorrection sequence
Correction determined:-5°, +5°, -5°, +5°
Differential Calculations
Back
1
2
3
4 A
B
C
D
Reference frame applied
-1 1 -1 1 Translationto servo codes
0
1
0
1
1
0
1
0
-A
-B
-C
-D
+A
+B
+C
+D
Servo mappingand line addressing
Servo
ControlLogic
PowerConversion
Feedback


Module Shell and InterfacesModule Shell and Interfaces
•Aluminum Construction
•15 inches long
•Acme Stub Nose Threads 6 pitch
•.5 in deep interference fit into shell
•Secured with press fit pull out pins

Frame SubassemblyFrame Subassembly
•.25 in aluminum construction
•Struts to mount IMU, GPS, CPU, Thermal Battery
•.5 in x .5in Mounting bar for canard assembly



CanardCanard
•Aluminum construction
•Machined from single piece
•NACA 0012 Airfoil Shape
•Positive stop machined into canard
•Hole to receive negative stop

Canard DeploymentCanard Deployment
•Helical torsion spring for deployment
•Positive stop machined into mechanism
•Spring loaded negative stop



Canard ActuationCanard Actuation
•Anti backlash gears
•Gears mount to tab on assembly
•Assembly rotates about nubbin
•Nubbin connected to frame mounting bar w/snap ring

Final DemonstrationFinal Demonstration
Two notebook PCsTwo notebook PCs• One will act as Altera-One will act as Altera-
based processing boardbased processing board• Second will act as GPS, Second will act as GPS,
IMU, RMS, providing IMU, RMS, providing simulated datasimulated data
More flexibleMore flexible Nios Devel. Kit has no Nios Devel. Kit has no
readily-useable readily-useable parallel portparallel port
RS232
ServoIEEE 1284 (Parallel)
“FPGA Processorboard”
“GPS, IMU, RMS”