Altimetry and Transponder Ground Simulation Experiment · interplanetary link laser pulses are...
12
Proceedings of the 16th International Workshop on Laser Ranging 663 Altimetry and Transponder Ground Simulation Experiment K.U. Schreiber a , M. Hiener a , B. Holzapfel a , H. Michaelis b , N. Brandl c , K.-H. Haufe c a Forschungseinrichtung Satellitengeodaesie, Technische Universitaet Muenchen Geodaetisches Observatorium Wettzell, 93444 Bad Koetzting, Germany b DLR e.V. Institute of Planetary Research, Rutherfordstr. 2, 12489 Berlin, Germany c Bundesamt fuer Kartographie und Geodaesie Geodaetisches Observatorium Wettzell, 93444 Bad Koetzting, Germany schreiber©fs.wettzell.de Abstract We have designed and built a compact demonstrator unit for the investigation of altimetry and transponder applications. A small light-weight breadboard carries a compact frequency doubled Nd:YAG pulse laser, afocal beam expansion optics, a small receiver telescope with spectral and spatial filter arrangements and a photosensitive detection device (SPCM, PMT or SPAD). The output laser energy can be as high as 45 mJ with a pulse-width of 3 ns and the telescope aperture is 12 cm. Simulations [1] suggested that the link margin for low Earth orbiting satellites (LEO) is comfortable and that it may be possible to obtain echoes from a dual-station experiment in several different configurations. This paper outlines details of the experiment and presents the obtained results. Key words: Satellite Laser Ranging, Optical Transponder, Laser Altimetry, Interplanetary Ranging PACS: 06.30.Gv, 42.79.Qx, 95.55.-n, 42.50.Ar 1. Introduction Laser ranging at interplanetary distances has become a viable option in recent times. The advances made in optical communications as a result of the need of higher transmission bandwidth for the recent generation of imaging satellites provides the necessary infrastructure namely pointing and spaceborne telescope design. Figure 1. A transponder for optical ranging consists of a laser transmitter and a photo- sensitive receiver on both ends of the distance of interest. Preprint submitted to ILRS May 9, 2009
Transcript of Altimetry and Transponder Ground Simulation Experiment · interplanetary link laser pulses are...

Proceedings of the 16th International Workshop on Laser Ranging
663
Altimetry and Transponder Ground Simulation Experiment
K.U. Schreiber
a, M. Hiener
a, B. Holzapfel
a, H. Michaelis
b, N. Brandl
c,
K.-H. Haufec
aForschungseinrichtung Satellitengeodaesie, Technische Universitaet Muenchen
Geodaetisches Observatorium Wettzell, 93444 Bad Koetzting, Germany bDLR e.V. Institute of Planetary Research, Rutherfordstr. 2, 12489 Berlin, Germany
cBundesamt fuer Kartographie und Geodaesie
Geodaetisches Observatorium Wettzell, 93444 Bad Koetzting, Germany
schreiber©fs.wettzell.de
Abstract
We have designed and built a compact demonstrator unit for the investigation of altimetry
and transponder applications. A small light-weight breadboard carries a compact frequency
doubled Nd:YAG pulse laser, afocal beam expansion optics, a small receiver telescope with
spectral and spatial filter arrangements and a photosensitive detection device (SPCM, PMT
or SPAD). The output laser energy can be as high as 45 mJ with a pulse-width of 3 ns and
the telescope aperture is 12 cm. Simulations [1] suggested that the link margin for low Earth
orbiting satellites (LEO) is comfortable and that it may be possible to obtain echoes from a
dual-station experiment in several different configurations. This paper outlines details of the
experiment and presents the obtained results.
Key words: Satellite Laser Ranging, Optical Transponder, Laser Altimetry,
Interplanetary Ranging
PACS: 06.30.Gv, 42.79.Qx, 95.55.-n, 42.50.Ar
1. Introduction
Laser ranging at interplanetary distances has become a viable option in recent times. The
advances made in optical communications as a result of the need of higher transmission
bandwidth for the recent generation of imaging satellites provides the necessary
infrastructure namely pointing and spaceborne telescope design.
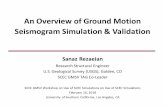
Figure 1. A transponder for optical ranging consists of a laser transmitter and a photo-
sensitive receiver on both ends of the distance of interest.
Preprint submitted to ILRS May 9, 2009

Proceedings of the 16th International Workshop on Laser Ranging
664
This suggests to include inter-satellite ranging and Earth to interplanetary satellite ranging as
newly available means of precise orbit determination (POD). In other cases of dedicated
space missions for fundamental physics, such as the proposed "Einstein Gravity Explorer"
[2] laser ranging may provide the tools for high-precision clock comparisons. Therefore it is
time to study the potential of interplanetary ranging in more detail. Since dedicated
experiments in space are far to expensive and time consuming to be realized, there are only
two other possibilities left. Either an existing pulse laser equipped mission can be "misused"
to evaluate an interplanetary optical ranging link or a ground based experiment has to be set
up such that all relevant parameters of an interplanetary optical link can be examined in great
detail. Figure 1 shows the basic concept of an optical transponder. There are two transmitters
and receivers located at the ranging terminals A and B. They are firing short laser pulses at
each other asynchronously and from a large distance. While the epochs of the detected
signals are timed on each local computer, the epochs of laser fire are exchanged via telemetry
between both stations. From this one can compute the range and the rate of change (on the
radial component) between both stations as well as the respective clock offset. In this way
the dependence of the receive signal on the covered distance follows a 1/r2 relationship rather
than 1/r4 like in the case of a two-way optical link from backreflections off corner cubes on
artificial satellites and on the moon [3]. While the moon is at about the largest distance that
can be practically tracked by using passive retro-reflectors, transponder have the potential to
work within the entire solar system on a reasonable link margin. Until today there have been
two feasibility studies, which were performed as experiments of opportunity making use of
NASA spaceprobes in orbit around Mars and in transfer to Mercury [4], namely:
One-way ranging to Mars Global Surveyor at a distance of 80 million km
Two-way ranging during a MESSENGER fly-by at a distance of 24 million km
The Mars Orbiter Laser Altimeter (MOLA) was orientated pointing toward Earth in order to
detect laser pulses transmitted from the 1.2 m telescope of the Goddard Space Flight Center
in Greenbelt. Since the transmitter of MOLA is no longer working only one-way ranging
could be demonstrated successfully based on a very small number of unambiguously
identified datations. In a similar way an equipment test of the Mercury Laser Altimeter
(MLA) during a fly-by of the MESSENGER spacecraft was used to determine the range and
clock offset between the spacecraft and the ground station in Greenbelt by a complete
ranging link in both directions. Consistent results were obtained despite the fact that the
number of data points were sparse and the laser pulse width of the altimeter was not ideal for
such a ranging application.
2. Transponder Simulation
In a very general way one can consider satellite laser ranging (SLR) as a special laser
transponder application. Provided that there are two ranging stations located sufficiently
close together (within the divergence angle of the reflected laser beam), it is possible to test
parts or all functions of a transponder link in an entirely ground based experiment. According
to [1] the equivalent transponder distance rt relative to an SLR laser link of the same station
is a function of the actual slant range rs. For a satellite in near circular orbit at the height h
above sea level rs can be expressed as

Proceedings of the 16th International Workshop on Laser Ranging
665
where Θ is the zenith distance and rE = 6378 km the mean radius of the Earth. The equivalent
transponder distance then becomes
Figure 2. Example of a Topex pass observed by the WLRS on June 20, 2001 under
cloudy conditions. The returns on the standard ranging configuration are shown on the
lower trace, while the echoes on the small extra receive aperture are displayed on the
upper trace.
One can see that it strongly depends on the slant range and on σs the laser cross-section of the
target in square meters. In the following we are assuming an atmospheric transmission TA of
around 0.7, which is the maximum value for the given operational wavelength of the ranging
systems of λ = 532 nm. It is difficult to establish a reliable value during the measurements.
As pointed out in [1] "real world" tests of transponder functions for distances as far out as the
outer planets of the solar system are possible. In a first test we have mounted a small
telescope with an aperture of 12 cm to the Wettzell Laser Ranging System (WLRS), pointing
along the optical axis of the main telescope in order to detect laser echos independently from
the routine ranging hardware. Over a period of several month echoes from a number of satel-
lites including Lageos and Etalon were recorded in parallel on the additional telescope. One
example of a satellite pass from Topex on June, 20 in 2001 is shown in fig. 2. This was an
intermediate step towards a transponder testbed installation, since it demonstrated a
sufficient link margin for such a small receive signal aperture. At the same time this basic
setup already resembles a simplified version of the basic layout of an asynchronous
transponder concept as outlined in [1]. Figure 3 illustrates the entire operation principle.
There are essentially two timescales involved, one for each terminal of the two stations
separated by a large distance. Under typical conditions it can be assumed that there is an
offset between the two timescales as well as there is a relative drift between them. In the case
of an interplanetary transponder the range r between the two stations would be
(1)
(2)

Proceedings of the 16th International Workshop on Laser Ranging
666
Figure 3. Functional diagram of the transponder simulation application. Time is
progressing along the x-axis, while the distance is corresponds to the y-axis. For an
interplanetary link laser pulses are transmitted directly between the two ranging
terminals. In a ground based simulation experiment, geodetic satellites are used to
backreflect the laser pulses, so that they can be detected by an independent ranging
system on the ground near the transmitting station.
where c is the velocity of light and tn,m are the corresponding epoch registrations on each
ranging terminals. During a typical transponder application many such pulses are transmitted
from both sides and a priori range estimates have to be applied to work out the respective
corresponding pairs of epoch registration used in eq. 3. However for a transponder simulation
setup with a geodetic satellite reflector target employed there are essentially three scenarios
available for studies. Case 1 is the usual satellite ranging operation for the station associated
with timescale 1 alone. Case 2 is the additional laser ranging operation associated only with
timescale 2. Transponder operations (case 3) can be realized by transmitting laser pulses
asynchronously from one station, receiving it by the other station and vice versa. In the most
simplified case both stations share the same telescope drive for pointing, while all other
hardware components like timers, control system and lasers etc. are independent. More
generally the two ranging terminals could be realized by two individual SLR stations in close
proximity as proposed in a NASA concept [5].
3.Transponder Demonstrator Experiment
A balanced transponder link is characterized by a comparable number of recorded photo-
electrons on both ends of the transmission path. For an optical satellite to satellite link this
usually would mean the application of similar laser transmitters and telescope apertures on
both terminals. However for a ground to satellite link it is desirable to have a large telescope
and a powerful laser on the ground where it is readily accessible and only a low-power laser
and small telescope in space. This reduces the demands on payload requirements
substantially. Therefore we have followed a similar approach for our testbed experiment. The
WLRS was used as Station A [6]. It operates a 0.75 m diameter telescope and a 180 mJ
frequency doubled Nd:YAG laser. The pulse width is 80 ps. A Quantel Brio laser with 35 mJ
(3 ns pulse width) with a transmit aperture of 3 cm was used for Station B. The
corresponding transmitter divergence has a minimum of 24 arc seconds. The receive
telescope is a 12 cm Maksutov type aperture with additional spatial and spectral filters in
order to allow daylight operation. Several different photo-detectors may be attached.
(3)

Proceedings of the 16th International Workshop on Laser Ranging
667
Experiments were carried out with a PMT (12% quantum efficiency), the SPCM module of
EG&G and a SPAD for single photo-electron detection.
Figure 4. Hardware layout of the transponder simulation module. On the left hand side
one can see the laser (from the backside), the transmit and receive aperture. The top
view on the right hand side also shows the filter arrangement behind the receive
aperture and the photo detection device
Figure 4 shows the compact design of the transponder simulation module. A diaphragm in
the receive path allows the adjustment of the receiver field of view in the range of 20 to 90
seconds of arc. Basic test operations of the transponder simulator were carried out by ranging
to a local ground target, namely a diffuse reflecting concrete pillar 180 m away.
Figure 5. Example of a ground target range measurement sequence. The low energy
laser pulse was reflected from a concrete pier at a distance of about 180 m.
Figure 5 shows a typical result of these ground tracks, detected with the photomultiplier as a
receiver. In order to operate the full transponder experiment we have set up a completely
independent ranging environment, including the event timer and control system software as
outlined by the block diagram in fig. 6. For simplicity it is assumed that the computer control
and data logging is part of the timer module. Each system needs a start and stop pulse to
perform the range measurement function and in addition a gate signal to arm the detector for
the reception of the return signal. Since both systems operate entirely asynchronous with a

Proceedings of the 16th International Workshop on Laser Ranging
668
repetition rate of 10 Hz in the case of the WLRS and 20 Hz for the transponder module, it is
necessary to cross over both the detector signal cable and the rangegate generator signal
between the two systems. Apart from this change both stations are treated like independent
ranging environments. Following [1] link budget calculations show the expected return
signal strength for a number of configurations summarized in table 1. For this calculation a
zenith distance of 30° and an atmospheric transmission of 0.7 was used. This corresponds to
reasonably good but not ideal conditions and assumes a collimated laser beam for both
transmitters. In order to operate the simulation module on top of the laser telescope of the
WLRS one has first to align the optical axis of the transmitter of the simulation module to be
collinear with the corresponding optical axis of the receiver. This was done by imaging the
ground target 180 m away from the simulator test location on the receive telescope of the
simulation module. Once the laser beam was in the center of the field of view of the receiver
telescope the alignment screws were tightened up. Then the entire base plate was lifted and
mounted on a adjustable frame over the elevation axis of the WLRS telescope. Figure 7
shows the simulation module sitting on the much larger telescope of the WLRS. The
alignment of the simulation module relative to the optical axis of the WLRS was achieved by
pointing the two systems to a reference target approximately 5 km away from the ranging
site. The entire simulator was adjusted with the mounting frame to also image the remote
reference target in the eyepiece of the receiver telescope.
Figure 6. Block diagram illustrating the cable crossover required for the transponder
simulation experiment.
Table 1. Expected link budget for ground based transponder simulation. The figures
for the WLRS are computed for the Micro-Channel-Plate photomultiplier.

Proceedings of the 16th International Workshop on Laser Ranging
669
Figure 7. Simulation module mounted on top of the WLRS telescope.
4.Experimental Results
4.1. Transponder Link
The transponder module remained on the WLRS telescope for one week and a total of 21
successful satellite passes were observed in different arrangements, covering all the different
options of table 1. In this paper we only report results from the two most demanding
configurations, namely the actual transponder setup and the case where a high Earth orbiting
satellite (LAGEOS 1) has been observed with the transponder module in SLR configuration.
Figure 8 shows the result for a daylight Beacon C path, asynchronously running in the
transponder configuration (fig. 6). This satellite is in a near circular orbit approximately 1000
km above the ground. According to tab. 1 one would expect a stronger echo detection rate on
the WLRS system, because of a link margin, which is by a factor of two higher and because
of the much higher laser pulse rate. However the data recorded by the transponder hardware
turned out to be much denser in the end. Although the reason for this behavior was not
unambiguously identified, circumstances suggest that this happened because of a residual
misalignment of the emitting laser beams between the two ranging systems. While the
colinearity of the optical axis of both receivers has been verified repeatedly by observing a
landmark several kilometers away, similar checks for the transmitting branches of the two
system have not been possible. Therefore it is very likely that a small misalignment is
responsible for the reduced link budget, because the divergence of the laser beam of the
transponder had to be increased. In subsequent observations there were two regimes
identified around 30 seconds of arc apart, where the return rate for each of the two systems is
at a maximum [7]. After the noise and the trend was removed from the residuals of both data-
sets by fitting a polynomial to the transponder data and applying the same parameters to the
WLRS measurements, the plot of fig. 9 is obtained. The observed scatter of the WLRS data
is much higher than for the simulation unit. This is caused by the much broader pulse width
(3 ns) of the Brio laser. In comparison the WLRS laser provides a pulse width of 80 ps.
There is more noise in the WLRS ranging window (fig. 8 bottom part) because of a repetition
rate twice as high as for the WLRS laser. The effect appears to be smaller than it is in reality,
since the WLRS operates under a much smaller field of view (50 μrad rather than 200 μrad)
and also uses a cooled detector. The transponder system has not been calibrated to the
reference point of the WLRS hence the observed offset of 10 ns between both systems.

Proceedings of the 16th International Workshop on Laser Ranging
670
Figure 8. A simultaneous observation of a Beacon C satellite pass with both ranging
systems in asynchronous transponder configuration. The pass was observed on August
16, 2008 in daylight.
Figure 9. The filtered transponder echos from fig. 8. The data recorded on the WLRS
exhibits a larger scatter caused by the 3 ns pulse width of the transponder transmitter.
The offset between the two tracks is introduced for better visibility.
4.2. Biases from Receive Signal Intensity Variations
Apart from demonstrating the basic functions and the feasibility of this transponder link
experiment, this setup is also useful to investigate systematic receive signal biases [8]. For
this purpose only the WLRS laser fires and both telescopes receive the same return signal
from the satellite. According to tab. 1 there is approximately a factor of 50 difference
between the generated numbers of photo-electrons on each detector system. Some of this
imbalance in receive power will usually be compensated by an adjustable gray wedge in the
receiver path of the WLRS system, but there are no simple rules for the settings. However
when the range residuals from a weak and a strong signal return level are plotted against each

Proceedings of the 16th International Workshop on Laser Ranging
671
other and intensity dependent detector delays appear, this will reflect as a systematic
signature in the residual vs. residual plot.
Figure 10. Range residual plot of a Beacon C pass taken on August 13, 2008.
Simultaneous detections on both ranging systems are plotted against each other in this
chart.
Figure 10 shows such an example for a observed Beacon C pass. A higher density of
observations suggest higher intensity on the return signal. The linear regression of this data
set yields a slope of 1.008, which is the first indication of a systematic difference between
both signals. In the next step we have applied the linear regression to the data and then
plotted these residuals versus time. This yields the scatter plot of fig. 11. The solid line
superimposed on this data was derived by taking the average of all data points in 1 minute
intervals. As expected, areas of high data density have a tendency towards shorter ranges.
This is in accordance with both the behavior of avalanche photodiodes operated in the Geiger
mode, where a higher return signal level by-passes several stages in the multiplication
process, which leads to the breakdown of the bias voltage of the diode. Also photomultipliers
employing a constant fraction discriminator for a signal voltage independent timing of the
arrival of the laser pulse are expected to measure shorter ranges for higher signal levels, since
the discriminator only works in a very limited signal voltage range.
4.3. Simulated Interplanetary Distance
Finally, we have also explored the weakest satellite link listed in tab. 1 and observed a
LAGEOS satellite pass on the transponder module alone. The return echo rate was very weak
as it is to be expected from a statistically obtained 2 photo-electrons from such a small
system.
Figure 12 shows the measured range residuals. There were about 60 returns detected within
560 seconds. This means that 0.5% of all shots (repetition rate: 20 Hz) obtained a valid return
signal. This is less than expected from tab. 1. A 2 photoelectron return signal level would
usually result in a data rate of about 10%. We believe that this discrepancy can be attributed
to both, a slightly larger beam divergence of the outgoing laser beam and an effective
atmospheric transmission below the maximum value of TA= 0.7. During the time, where
valid satellite returns have been detected the slant range varied from 7500 km ≤ rs ≤ 6700 km
with the marginally higher return rate at the longer distances at the beginning of the pass.
With sr = 7500 km, a radar cross section of the satellite LAGEOS of σs = 15 million square

Proceedings of the 16th International Workshop on Laser Ranging
672
meter and an assumed value of TA = 0.6 the equivalent transponder distance for the here
described transponder simulation module turns out to be rt = 0.44 AU.
Figure 11. Range residual plot of a Beacon C pass taken on August 13, 2008. The
residuals are obtained from a linear regression on simultaneous detections on both
ranging systems. The black line was derived from this data set by averaging the data
over 1 minute intervals.
Figure 12. Range residual plot of a LAGEOS 1 pass taken on August 19, 2008 using
the transponder module alone. The satellite track is very weak as expected from the
low signal level calculated for this case (tab. 1).
If we apply the same calculation for the WLRS system, which routinely tracks GPS satellites
and also obtained laser echoes from the Apollo 15 laser reflector, we find a convenient
equivalent transponder distance of rt ≈ 4 AU and a maximum demonstrated marginal
transponder distance of rt ≈ 110 AU. However this would require a balanced transponder
link, with a space segment about 5 times more efficient than the module investigated in this
paper.
5.Conclusion
In this paper we have simulated basic properties of optical interplanetary transponder links
experimentally. A small transponder module comprising a pulse laser, a small telescope

Proceedings of the 16th International Workshop on Laser Ranging
673
including provisions for spectral and spatial filtering and an event timer unit was used
together with the Wettzell Laser Ranging System for the simulation. During the experiment
laser pulses from one system were transmitted to orbiting geodetic satellites. The back-
reflections were recorded on the respective other system. The characteristics of the two
independent ranging instruments were then used to compute the equivalent transponder deep
space distance. While the transponder module showed sufficient sensitivity to cover
distances of up to 0.44 AU, the WLRS has a comfortable l-way range margin of about 4 AU.
However, since successful lunar echoes have been obtained from the WLRS in the past, it
has demonstrated a very marginal equivalent transponder range to about 110 AU, but this
cannot be called operational. While the laser link margin is certainly an important parameter,
other needs like precise pointing and the alignment of the transmit and receive path are of
similar concern for successful interplanetary transponder applications. This is also evident in
our experiment, since the measured signal levels always lagged behind the link budget
calculations. The great advantage of the transponder simulation is a complete end to end test
of a transponder link under real conditions, including all of the involved hardware and the
atmosphere, from an easily accessible ground based observatory. The only differences
between this experiment and a real deep space transponder link are a double pass of the
optical signal through the atmosphere and the alignment of the optical path between the
observatory on the ground and an interplanetary spacecraft.
Acknowledgement
This project is supported by Bundesamt für Karographie and Geodäsie (BKG) and the
Deutsches Zentrum für Luft- und Raumfahrt (DLR), Berlin. The authors would like to thank
Wolfgang Schlüter from the Bundesamt für Kartographie und Geodäsie for their support of
the project and Michael Wensauer for the assistance in preparing the necessary
instrumentation.
References
[1] J. J. Degnan, "Simulating Interplanetary Transponder and Laser Communications
Experiments via Dual Station Ranging to SLR Satellites"; Proceedings of the 15th
International Workshop on Laser Ranging, Canberra, Australia
[2] S. Schiller, G.M. Tino, P. Gill, C. Salomon and 34 others; Einstein Gravity Explorer - a
medium-class fundamental physics mission; Exp. Astron., DOI: 10.1007/s10686-008-
9126-5, (2008)
[3] J. J. Degnan; "Asynchronous laser transponders for precise interplanetary ranging and
time transfer‖; J. Geodynamics 34, 551 - 594, (2002)
[4] D. E. Smith, M. T. Zuber, X. Sun, G. A. Newman, J. F. Cavanaugh, J. F.
McGarry, T. W. Zagwodzki; "Two Way Laser Link over Interplanetary Distance";
Science, 311, 6. January 2006
[5] J. McGarry, T. Zagwodzki, P. Dabney, P. Dunn, J. Cheek; "Laser Ranging at Planetary
Distances from SLR2000"; Proceedings of the 15th International Workshop on Laser
Ranging, Canberra, Australia
[6] W. Schlüter, R. Dassing, P. Sperber, R. Kilger, U. Schreiber; The Role of the
Fundamental Station Illustrated by the Example Wettzell; AGU Geodynamics Series
Vol. 25, 125 - 132, (1993)

Proceedings of the 16th International Workshop on Laser Ranging
674
[7] B. Holzapfel, "Transpondersimulationen für Anwendungen in den Geodätischen
Raumverfahren; Diploma Thesis; Universität der Bundeswehr, München, (2008)
[8] U. Schreiber, A. Schlicht, K.H. Haufe, "Systematic Biases in Laser Range
Measurements‖; Proceedings of the SPIE, 3865, Laser Ranging and Atmospheric Lidar
Techniques II, 64 - 73, (1999)