Akshay AME 544 Lab Report
33
AME 544 Computer Control of Mechanical System Experiment Report Model 210 Rectilinear Plant Akshay Anand Nerurkar USC ID#8759392138 Group Members: Shi, Xiaotian: [email protected] Xu, Tianxiang: [email protected] Hong, Wenbin: [email protected] Yang, Ye: [email protected] Akshay, Nerurkar: [email protected] Instructor: Dr. Serkan Kalender
-
Upload
akshay-nerurkar -
Category
Documents
-
view
257 -
download
15
Transcript of Akshay AME 544 Lab Report

AME 544
Computer Control of Mechanical System
Experiment Report
Model 210 Rectilinear Plant
Akshay Anand Nerurkar
USC ID#8759392138
Group Members:
Shi, Xiaotian: [email protected]
Xu, Tianxiang: [email protected]
Hong, Wenbin: [email protected]
Yang, Ye: [email protected]
Akshay, Nerurkar: [email protected]
Instructor:
Dr. Serkan Kalender

AME 544 Experiment Report Akshay Anand Nerurkar
1
Table of Contents
(i) Abstract………………………………………………………………………………………………………………………….1
(ii) Introduction…………………………………………………………………………………………………………………...1
1. PD Control of Rigid Body…………………………………………………………………………………………………………..3
1.1 System Identification……………………………………………………………………………………….………………….….5
1.2 Designing a PV Control………………………………………………………………………………………………..………….7
1.3 Effect of sampling period (Ts)………………………………………………………………………….………………………14
1.4 Effect of Integral Gain…………………………………………………………………………………………………..……….16
1.5 Designing a Velocity and Acceleration feedforward……………………………………………………………….20
2. Control of 2DOF Mechanical Drive System………………………………………………………………………………24
2.1 System Identification ............................................................................................................... 24
2.2 Design Notch Filter .................................................................................................................. 25
2.3 Simulation ............................................................................................................................... 32
2.4 Discussion & Conclusion.......................................................................................................... 32

AME 544 Experiment Report Akshay Anand Nerurkar
2
Due Day: 05/06/2016
Experiment Report
Date: May 6th, 2016
ABSTRACT
This report is based on two main experiments, PD control of rigid body and Two DOF plant
control. These two experiment use ECP software to control the Model 210 Rectilinear Plant. In
this report, the influence of different control methods, like the PD control, PID control and the
Notch Filter Design will be explored and discussed. Results will be based on step response, ramp
response, sine sweep response, cubic response and etc. And discussion and analysis will be based
on comparing the results from experiment and the simulations from MATLAB.
Introduction
The experiments were carried out with ECP using Model 210 Rectilinear Plant. It consists of
three part, system interface software, real-time Controller & I/O and electromechanical plant.
The experiments consist of two parts the first part is PD Control of Rigid Body, the second part
is 2 Degree of Freedom Plant Control. In the first part, it will identify the plant and compare step,
frequency, ramp, cubic and sinusoidal responses separately with different damping ratio and
sampling period, and use Simulink to get its simulation result. In the second part, it will identify
the system and compare step and frequency responses separately between a system with notch
filter and without, and also using Simulink to compare its experimental and simulation result.

AME 544 Experiment Report Akshay Anand Nerurkar
3
1 PD Control of Rigid Body
1.1 System Identification
In this experiment, the method to identify hardware gain 𝐾ℎ𝑤 of the plant is using open and
closed loop step response. Firstly, remove the spring and disconnect the damper; Secondly, use
first messed cart and encoder #1.
Open Loop Response
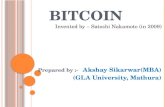
The algorithm of this method is shown as the block diagram in Figure 1.1.
Figure 1.1 Open Loop Step Response Diagram
In the diagram, K is the hardware gain that we need to get from the calculation.
Setup step input. Then amplitude is 0.5V. Time is 1000 msec. Thus input is U(s)=0.5/s.
Because the actual unit is counts rather than voltage, we have to change voltage into counts by
using the constant that 32768 counts correspondence to 10V. Therefore, the actual step input is:
R(s)= (0.5*32768/10)/s=1638.4/s.
The relationship between R(s) and Y(s) can be shown as the equation (1):
R(s) ∙𝐾
𝑠2 = 𝑌(𝑠) (1)
The result of the experiment is shown in Figure 1.2 (a) and 1.2 (b). In the figure, we can find
that the curve in the position diagram is much clearer, thus we use the position diagram to
compute the hardware gain.

AME 544 Experiment Report Akshay Anand Nerurkar
4
Figure 1.2 (a) the plot of open loop step response with acceleration
Figure 1.2 (b) The plot of open loop step response with position
We use the Curve Fitting Tool (cftool) in MATLAB to fit the position diagram. By loading
the data from the position diagram and deviating the linear model, we got the slope of the
velocity. All the data is shown in the Figure 1.3.

AME 544 Experiment Report Akshay Anand Nerurkar
5
Figure 1.3 Fitting the curve in MATLAB
According to the result of curve fitting tool, we can get the slope. And we can get the
hardware gain by using the equation (2).
𝑦(𝑡)̇ = 2 × 0.5 × 0.5 × 3276.8 × 𝐾 (2)
Thus,
K =𝑠𝑙𝑜𝑝𝑒
2 × 0.5 × 0.5 × 3276.8=
2 × 1.272 × 105
2 × 0.5 × 0.5 × 3276.8= 155.2734
Therefore, the hardware gain K is 155.27 with the method of open loop response.
A. Closed Loop Response
The algorithm of this method is shown as the block diagram in Figure 1.4.
Figure 1.4 Close Loop Step Response Diagram
According to the diagram aforementioned, we can easily get the transfer function:

AME 544 Experiment Report Akshay Anand Nerurkar
6
Solving this with the given value of transfer function we get,
G(s) =𝐾𝐾𝑃
𝑠2 + 32𝐾𝐾𝑃
According to the transfer function, we can find that the damping ratio =0, and the natural
frequency is
Solving this with the given value of transfer function we get,
𝑤𝑛 = √32𝐾𝐾𝑃.
In the experiment, we got the closed loop step response diagram, to know the exact
amplitude of the diagram, we export the data from ECP and import the data into the MATLAB.
In Figure 1.5, we tested two time periods, and we exported the data from ECP, so that we
can import the data into MATLAB, to get the accurate amplitude and the time.
In Figure 1.6, after simulating the close loop response to the step input, we used MATLAB
to find the maximum amplitude, and the time period. So that we can get the hardware value.
Figure 1.5 Closed loop step response diagram

AME 544 Experiment Report Akshay Anand Nerurkar
7
Figure 1.6 Simulink the closed loop step response in MATLAB
And, after we found the peak of each time period, we got the natural frequency by using the
equation:
𝑤𝑛 =2𝜋
𝑇=
2𝜋
(1.496 − 0.31)/2= 10.5955 𝑟𝑎𝑑/𝑠
Calculate the natural the hardware gain:
K =𝑤𝑛
2
32×𝐾𝑝=
10.59552
32∗0.02=175.4165
B. Conclusion:
In this experiment, we used two different methods to get the hardware gain. Compared to
the open loop system, closed loop system is more stable and can also eliminate the influence of
disturbance. So the result from closed loop step response is more accurate.
So we decided to use the result from closed loop system. 𝐾ℎ𝑤 = 175.42
1.2 PV Control Design
The problem is to design a PV control with desired natural frequency of 4 Hz and damping
ratios of 0.4, 0.7 and 1with a sampling period of 0.002652 seconds.
A. Experiment Part
Firstly, we need to know the control law of this experiment. Figure 1.7 is the block diagram.

AME 544 Experiment Report Akshay Anand Nerurkar
8
Figure 1.7 PV Control
From the diagram, we can easily know the transfer function:
Solving with the appropriate value we get,
𝑌(𝑠)
𝑅(𝑠)=
32𝐾𝑝𝐾
𝑠2 + 32𝐾𝑣𝐾𝑠 + 32𝐾𝑝𝐾
Then,
2𝑤𝑛 = 32𝐾𝑣𝐾, 𝑤𝑛 = √32𝐾𝐾𝑃
Since the hardware gain 𝐾ℎ𝑤 = 175.42, the natural frequency is 4Hz, 𝑤𝑛 = 8𝜋 rad/s, we can
easily get 𝐾𝑃= 0.1125.
To do the experiment, we need to know the 𝐾𝑣 for the system, since ECP use BDM theory,
we can discrete the equation, and the sampling time is 𝑇𝑠 = 0.002652.
And the BDM equation is:
𝐾𝑣𝑠 = 𝐾𝑣1−𝑧−1
𝑇𝑠= 𝐾𝑣
′(1 − 𝑧−1), 𝐾𝑣′ =
𝐾𝑣
𝑇𝑠
After calculation, we got all the data as follows:
Table 1.1 Values of 𝐾𝑉
Damping Ratio 𝐾𝑉 𝐾𝑉/𝑇𝑠
0.4 0.003582 1.350678
0.7 0.006268 2.363499
1 0.008955 3.376696

AME 544 Experiment Report Akshay Anand Nerurkar
9
1) Step Response
Figure 1.7(a) Close Loop Step with =0.4
Figure 1.7(b) Close Loop Step with =0.7

AME 544 Experiment Report Akshay Anand Nerurkar
10
Figure 1.7(c) Close Loop Step with =1
Result Discussion: (Step Response)
Comparing the response chart using different damping ratio, we can conclude a clear effect on its
characteristics such as rise time, peak time, overshoot, settling time and the period of oscillation.
With the increasing of damping ratio, theoretically, rise time will become longer, the overshoot
will become smaller, peak time will become later, settling time will become shorter and period of
oscillation will be reduced. The tendency of each characteristic is perfectly reflected in the
experimental response chart.
2) Sine Sweep Response
We tested the sin sweep response with close loop control system. The method is to use
different damping ratio to test the response to the sine sweep input. In this experiment, we tested
the response to the sine sweep input with =0.4, 0.7 and 1.

AME 544 Experiment Report Akshay Anand Nerurkar
11
Figure 1.8 (a) Close Loop Sine Sweep with =0.4
Figure 1.8 (b) Close Loop Sine Sweep with =0.7

AME 544 Experiment Report Akshay Anand Nerurkar
12
Figure 1.8 (c) Close Loop Sine Sweep with =1
Results conclusion: (Sine Sweep Response)
By comparing those response charts, we can find that the amplitude increases first and then
decrease while time increases when damping ratio is 0.4. When damping ratio is 0.7 and 1, the
amplitude decreases consistently as the frequency increases. As we can see from the chart,
The amplitude decreases faster as the frequency increase when damping ratio is 0.7, and the
amplitude drops faster in the low-frequency region when damping ratio is 1.
By comparing the shape and value of the actual response chart and the bode plot we get from
Matlab, we conclude that the experimental chart is same as the bode plot.
B. Simulink in MATLAB for the two responses
To understand the result better and to check the result of the experiment, we need to simulate
the step response and the sine sweep response in MATLAB. By comparing between the results
from experiments and the plot generated from MATLAB, we can know how the disturbance will
have influence on the results.
1) Step Response Simulation
We simulated the close loop control system with different damping ratio under the step
input in MATLAB. The results are shown as follows in Figure 1.9

AME 544 Experiment Report Akshay Anand Nerurkar
13
Figure 1.9 (b) Simulate the Close Loop Step with =0.7
Figure 1.9 (c) Simulate the Close Loop Step with =1
2) Sine Sweep Response Simulation
Since the sine sweep method is to get the bode diagram by experiment, when we simulate
the results in MATLAB, we can compare the results with bode diagram directly.

AME 544 Experiment Report Akshay Anand Nerurkar
14
Figure 1.10 (b) Simulate the Close Loop Sine Sweep with =0.7
Figure 1.10 (c) Simulate the Close Loop Sine Sweep with =1
1.3 Experiments based on different sampling time (Effect of sampling time)
In this part, we need to find out the influence of selecting different sampling times. Initial
settings: Step input with 1500 counts and dwell time is 2 seconds
Based on the former experiments, we also tried =0.4, 0.7 and 1 as the damping ratio during
the whole experiment, and we chose 𝑇𝑠 = 0.002652𝑠 as the reference. Chose some longer
sampling times 0.04420𝑠, 0.0106 𝑎𝑛𝑑 0.0645𝑠 and one shorter sampling time 0.000884𝑠 to
see what would happen.

AME 544 Experiment Report Akshay Anand Nerurkar
15
Figure 1.11 (a) Close Loop step with 𝑇𝑠 = 0.000884𝑠
Figure 1.11 (a) Close Loop step with 𝑇𝑠 = 0.0106𝑠
Figure 1.11 (c) Close Loop step with 𝑇𝑠 = 0.04420𝑠

AME 544 Experiment Report Akshay Anand Nerurkar
16
Figure 1.11 (d) Close Loop step with 𝑇𝑠 = 0.0645𝑠
Conclusion and analysis
According to the figure Ts=0.0645𝑠, we could conclude that with a longer sampling period, the
graph comes with a larger overshoot and more significant oscillations, which means it has
magnitude error. For the figure Ts=0.00084𝑠, the overshoot is smaller and the oscillations are
less. Thus, comparing two diagrams, the plots with smaller sampling time have a more accurate
output than the diagram with longer sampling time. But when we run the system, it takes a
longer time to get the plot with smaller sampling time than the plot with a longer sampling time,
which means a system with too long sampling time will increase the unnecessary running time,
so we should take many factors into consideration to choose an appropriate sampling time.
1.4 Effect of Integral Gain
In this part, we need to find out the influence of adding integral gain into the system.
In the ECP software, the differential and integral algorithm were shown as follows:
D(𝑧−1) = 𝐾𝑑(1 − 𝑧−1)
I(𝑧−1) =𝐾𝑖
(1 − 𝑧−1)
Our group chose =0.4, 𝑇𝑠 = 0.002652𝑠 as the initial settings, and we will apply the
integral gain 𝐾𝑖 = 0.25 𝑎𝑛𝑑 0.5 to step and ramp input to see the effect of integral gain.
After calculation, we got all the parameters in the discrete time domain as follows:

AME 544 Experiment Report Akshay Anand Nerurkar
17
TABLE 1.2 The determined parameters
Damping
Ratio
The
Sampling
Time 𝑇𝑠
The
Proportional
Gain 𝐾𝑝
The
Differential
Gain 𝐾𝑑
The Integral
Gain 𝐾𝑖
Continuous 0.4 0.1125 0.003582 0.25/0.5
Discrete 0.4 0.002652 0.1125 1.35068 6.63e-4/
1.326e-3
A. Without Integral Gain
Figure 1.12 (a) Response to step input without 𝐾𝑖

AME 544 Experiment Report Akshay Anand Nerurkar
18
Figure 1.12 (b) Response to ramp input without 𝐾𝑖
B. Under Step Input
We tested the response under the step input with different integral gains, and the results are
as follows:
When 𝐾𝑖 = 0.25, the result is shown in Figure 1.13(a).
Figure 1.13 (a) Response to step input with 𝐾𝑖 = 0.25
When 𝐾𝑖 = 0.5, the result is shown in Figure 1.13(b)

AME 544 Experiment Report Akshay Anand Nerurkar
19
Figure 1.13 (b) Response to step input with 𝐾𝑖 = 0.5
C. Under Ramp Input
We tested the response under the ramp input with different integral gains, and the results are
as follows:
When 𝐾𝑖 = 0.25, the result is shown in Figure 1.14(a)
Figure 1.14 (a) Response to ramp input with 𝐾𝑖 = 0.25
When 𝐾𝑖 = 0.5, the result is shown in Figure 1.14(b)

AME 544 Experiment Report Akshay Anand Nerurkar
20
Figure 1.14 (b) Response to ramp input with 𝐾𝑖 = 0.5
Conclusion and analysis
Those diagrams above show, the integral gain can be used to help reduce error of the system.
From the diagrams with integral controller, the steady state of position plot of encode 1 is almost
identical to the plot of command position, which means the error of the system is almost reduced
to zero. And it also increase the oscillation of the system, which can observed from those plots
that the maximum overshoot is increased, which means integral gain will cause system become
unstable.
1.5 Effect of feedforward Gain
In this experiment, we need to find out the influence of feedforward gains under cubic
response and sinusoidal response. Firstly, we need to design a velocity and acceleration
Block diagram of the system with feed forward control

AME 544 Experiment Report Akshay Anand Nerurkar
21
Feedforward control law. And we need to choose some parameters like damping ratio ,
sampling time 𝑇𝑠 , proportional gain 𝐾𝑝 , differential gain 𝐾𝑑 and integral gain 𝐾𝑖.
In the ECP software, the differential and integral algorithm were shown as follows:
D(𝑧−1) = 𝐾𝑑(1 − 𝑧−1)
I(𝑧−1) =𝐾𝑖
(1 − 𝑧−1)
Also, from the labs aforementioned, the transfer function G(s):
G(s) =32𝐾
𝑠2 + 32𝐾𝐾𝑑𝑠
Feedforward control is a perfect tracking controller, to use this control law, we need to
know G−1(s):
G−1(s) =𝑠2 + 32𝐾𝐾𝑑𝑠
32𝐾=
1
32𝐾𝑠2 + 𝐾𝑑𝑠
Therefore, we can easily get the velocity feedforward gain and acceleration feedforward gain,
𝐾𝑣𝑓𝑓 = 𝐾𝑑
𝐾𝑎𝑓𝑓 =1
32𝐾
In the ECP software, the feedforward control law is shown as follows:
G−1(z) =𝐾0 + 𝐾1z−1 + ⋯ + 𝐾6z−6
1 + 𝐿1z−1 + ⋯ + 𝐿6z−6
According to the BDM method,
s =1 − z−1
𝑇𝑠
Then, we can get the perfect tracking control law G−1(z)
G−1(z) = (1
32𝐾𝑇𝑠2 +
𝐾𝑑
𝑇𝑠)+(−
1
16𝐾𝑇𝑠2 −
𝐾𝑑
𝑇𝑠) z−1+
1
32𝐾𝑇𝑠2 z−2
And all the parameters needed in the feedforward control have been listed in table 1.3.
Table 1.3 The determined parameters in feedforward control

AME 544 Experiment Report Akshay Anand Nerurkar
22
The Damping Ratio The Sampling Time The proportional Gain The differential Gain
0.4 0.002652 0.1125 0.003582
𝐾0 𝐾1 𝐾2 The integral Gain
1.4179 1.485 0.0672 0.25/0.5
a. The response without feedforward control law
Figure 1.15 (a) Response to cubic input without feedforward
Figure 1.15 (b) Response to sinusoidal input without feedforward

AME 544 Experiment Report Akshay Anand Nerurkar
23
b. The response to cubic with feedforward control law
Figure 1.16 (a) Response to cubic with feedforward
Figure 1.16 (b) Response to cubic with feedforward & Ki=0.25
c. The response to sinusoidal with feedforward control law
Figure 1.17 (a) Response to sinusoidal with feedforward

AME 544 Experiment Report Akshay Anand Nerurkar
24
Figure 1.17 (b) Response to sinusoidal with feedforward & Ki=0.5
Conclusion and analysis
Those diagrams above shows that with the perfect tracking controller, the position plot of encode
1 is almost identical to the plot of command position, which means the following error is almost
reduced to zero, and the rise time is shorter than before.
2. Two DOF Plant Control
2.1 System Identification
Two DOF Plant is a system that require two independent coordinates to describe their
The equations of notion are given as:
𝑀1𝑥1̈ = 𝐹 − 𝑘(𝑥1 − 𝑥2) − 𝑏(�̇�1 − �̇�2)
𝑀2�̈�2 = 𝑘(𝑥1 − 𝑥2) + 𝑏(�̇�1 − �̇�2)
Taking the Laplace Transform,
The transfer function from F to 𝑥1 is: (collocated-plant)
G1(s) =x1(s)
F(s)=
𝑠2+𝑏
𝑀2𝑠+
𝑘
𝑀2
𝑀1𝑠2(𝑠2+(1+𝑀2𝑀1
)(𝑏
𝑀2𝑠+
𝑘
𝑀2))
= 1
𝐽1𝑠2
𝑠2+𝑏
𝑀2𝑠+
𝑘
𝑀2
𝑠2+𝑀1+𝑀2𝑀1𝑀2
𝑏𝑠+𝑀1+𝑀2𝑀1𝑀2
𝑘
And the transfer function from F to 𝑥2 𝑖𝑠 : (non-collocated plant)
G2(s) =x2(s)
F(s)=
1
𝑀1𝑠2
𝑏𝑠 + 𝑘𝑀2
𝑠2 +𝑀1 + 𝑀2
𝑀1𝑀2𝑏𝑠 +
𝑀1 + 𝑀2
𝑀1𝑀2𝑘
And, transfer function from 𝑌1 to 𝑌2 is:

AME 544 Experiment Report Akshay Anand Nerurkar
25
𝑌2
𝑌1=
x2(s)
x1(s)=
(𝑏𝑠 + 𝑘)/M2
𝑠2 +𝑏
𝑀2𝑠 +
𝑘𝑀2
2.2 PD & Notch Filter Design
In this experiment, the problem is to find out the influence of notch filter on the response
under ramp input and sine sweep input.
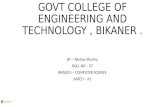
To achieve a PD & Notch Filter Design, we can follow a classic block diagram of notch filter
design as follows:
Figure 2.1 The block diagram of notch filter design
a. Define Natural Frequency
1) Closed Loop Frequency
In the experiment, we got the sine sweep response, as we can see in the Figure 2.2,
comparing with the response curve, the command position curve is easier to find the 𝜔𝑛𝑝𝑟.
Figure 2.2(a) Closed Loop Sine Sweep Diagram

AME 544 Experiment Report Akshay Anand Nerurkar
26
Figure 2.2(b) Closed Loop Sine Sweep Command Diagram
So we can know that:
𝜔𝑛𝑧𝑟=3.62Hz × 2π = 21.8 rad/s
𝜔𝑛𝑝𝑟=5.55Hz× 2π = 34.8717 rad/s
𝑝
=𝜔2 − 𝜔1
2𝜔𝑛𝑝𝑟= 0.0618
𝑧
=𝜔4 − 𝜔3
2𝜔𝑛𝑧𝑟= 0.07011
𝜔𝑛𝑝 =𝜔𝑛𝑝𝑟
√1−2𝑝2
= 35.0057 rad/s
𝜔𝑛𝑧 =𝜔𝑛𝑧𝑟
√1−2𝑧2
= 21.888 Rad/s
Then,
𝑘
𝑀2 = 𝜔𝑛𝑧
2 = 21.9112 = 480.0919
𝑀1 + 𝑀2
𝑀1𝑀2𝑘 = 𝜔𝑛𝑝
2 = 35.00572 = 1225.399
𝑏
𝑀2= 2
𝑧 𝜔𝑛𝑧 = 3.0724
𝑀1 + 𝑀2
𝑀1𝑀2𝑏 = 2
𝑝 𝜔𝑛𝑝 = 4.3267
Then, we can identify the plants:

AME 544 Experiment Report Akshay Anand Nerurkar
27
𝐺𝑐(𝑠) =𝑠2 + 3.0724𝑠 + 480.0919
𝑠2 + 4.3267𝑠 + 1225.399
G1(s) = 𝑠2+3.0724𝑠+480.0919
𝑠4+4.3267𝑠3+1225.399𝑠2
𝑌2
𝑌1=
x2(s)
x1(s)=
3.0724𝑠 + 480.0919
𝑠2 + 3.0724𝑠 + 480.0919
2) Open Loop Step Response
In this way, we can easily get the diagram of open loop step response as shown in Figure 2.3
Figure 2.3 Open Loop Response

AME 544 Experiment Report Akshay Anand Nerurkar
28
Figure 2.4 Simulation of Open Loop Response in MATLAB
To get the natural frequency of this open loop response, we exported the data from ECP and
imported the data into MATLAB, after plot the diagram, we found the exact natural frequency
from the Figure 2.4. The natural frequency
T= 2.922−1.186
6= 0.2893𝑠
𝜔𝑛𝑧 =2𝜋
𝑇= 21.71608 𝑟𝑎𝑑/𝑠
Since these two methods can get the same natural frequency, in this report, we don’t further
the calculation part.
b. Notch Filter
Firstly, notch filter is a band-stop filter with a narrow stopband, which a filter that passes
most frequencies unaltered, but attenuates those in a specific range to very low levels.
To control this system, we need to design a controller with some zeros, which is near the
undesirable damped poles, to attenuate the effects of these poles.
To design notch filter, there are two parameters needed, one is the resonant frequency, 𝜔𝑟;
The other is the attenuation desired, 𝑀𝑎.
Then, we can design notch filter by considering the equations as follows:

AME 544 Experiment Report Akshay Anand Nerurkar
29
𝐺𝑐(𝑠) =𝑠2 + 2
𝑧𝜔𝑛𝑧𝑠 + 𝜔𝑛𝑧
2
𝑠2 + 2𝑝
𝜔𝑛𝑝𝑠 + 𝜔𝑛𝑝2
To realize the function of the notch filter, we still need to set some parameters:
1) Choosing 𝜔𝑛𝑧 = 𝜔𝑛𝑝 = 𝜔𝑟;
2) Let |𝐺𝑐(𝑗𝜔𝑟)| =𝑧
𝑝
= 𝑀𝑎.
In the ECP software, the notch filter control law is shown as follows:
𝐺𝑐(z) =𝑁0 + 𝑁1z−1 + ⋯ + 𝑁4z−4
1 + 𝐷1z−1 + ⋯ + 𝐷4z−4
After calculating based on the BDM, the sampling time is 0.004420s. we can easily get these
parameters:
Table 2.1 Parameters for notch filter
𝑁0 𝑁1 𝑁2 𝐷1 𝐷2
0.7924 -1.5619 0.7714 -1.7524 0.7724
2.3 Response to Ramp & Sine Sweep
In this experiment, we set some initial values like the proportional gain 𝐾𝑝 = 0.4, the
differential gain 𝐾𝑑=0.2, the sampling time 𝑇𝑠 = 0.004420 𝑠. Then, we executed the designed
PD controller with and without the notch filter, and we got diagrams as follows:
1) Under the ramp input

AME 544 Experiment Report Akshay Anand Nerurkar
30
Figure 2.2 (a) Ramp response without the notch filter
Figure 2.2 (b) Ramp response with the notch filter
2) Under the sine sweep input

AME 544 Experiment Report Akshay Anand Nerurkar
31
Figure 2.3 (a) Sine sweep response without the notch filter
Figure 2.3 (b) Sine sweep response with the notch filter
Conclusion and analysis:
In the non-‐collocated system, the free part is hard to control and will induce resonances and
oscillation, which will affect the stability of the system. From the first diagram, the system

AME 544 Experiment Report Akshay Anand Nerurkar
32
without notch has obvious resonance and oscillation. In The second diagram, after adding notch
filter, the resonance of the system was reduced magnificently. Thus, the conclusion can be
derived that, notch filter can help system reduce the oscillation and resonance that caused by free
non-‐collocated part, and increase the stability of the system.
2.3 Simulation
Conclusion and Analysis
Using comparing the plots above, the conclusion can be derived that, before using notch in this
theoretical system, the steady-‐state following error is large. After adding notch filter, the
resonance are decreased and the time of oscillation is reduced, which is corresponding the results
in the experiment.