Air-to-Air Path Loss Prediction Based on Machine...
10
Research Article Air-to-Air Path Loss Prediction Based on Machine Learning Methods in Urban Environments Yan Zhang , Jinxiao Wen , Guanshu Yang , Zunwen He , and Xinran Luo School of Information and Electronics, Beijing Institute of Technology, Beijing 100081, China Correspondence should be addressed to Zunwen He; [email protected] Received 6 April 2018; Accepted 14 May 2018; Published 13 June 2018 Academic Editor: Liu Liu Copyright © 2018 Yan Zhang et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Recently, unmanned aerial vehicle (UAV) plays an important role in many applications because of its high flexibility and low cost. To realize reliable UAV communications, a fundamental work is to investigate the propagation characteristics of the channels. In this paper, we propose path loss models for the UAV air-to-air (AA) scenario based on machine learning. A ray-tracing soſtware is employed to generate samples for multiple routes in a typical urban environment, and different altitudes of Tx and Rx UAVs are taken into consideration. Two machine-learning algorithms, Random Forest and KNN, are exploited to build prediction models on the basis of the training data. e prediction performance of trained models is assessed on the test set according to the metrics including the mean absolute error (MAE) and root mean square error (RMSE). Meanwhile, two empirical models are presented for comparison. It is shown that the machine-learning-based models are able to provide high prediction accuracy and acceptable computational efficiency in the AA scenario. Moreover, Random Forest outperforms other models and has the smallest prediction errors. Further investigation is made to evaluate the impacts of five different parameters on the path loss. It is demonstrated that the path visibility is crucial for the path loss. 1. Introduction In recent years, unmanned aerial vehicles (UAVs), as aircraft without pilots on board, have shown great promise due to their high mobility and deployment flexibility. With the development of UAV manufacturing, its cost is reduced while its performance continuously increases. As a result, there are more and more attractive applications for UAV, such as traffic monitoring, emergency rescue, forest fire detection, cargo transport, and so on [1, 2]. Stable and efficient wireless communication links are indispensable in most UAV applications. erefore, the UAV communications play an important role in the future fiſth-generation wireless networks (5G), providing vast coverage and reliable relaying. Meanwhile, the propagation environment of UAV-aided communication systems differs from that of traditional ones, which brings enormous challenges. An accurate under- standing of the UAV wireless channels is crucial for the design and deployment of these communication systems. e wireless signals from/to UAVs may be obstructed and may encounter different propagation conditions along the path. e attenuation of the electromagnetic wave, which is usually described by the path loss, is of great significance for the link budget analysis and network planning for UAV communications. erefore, many works have been finished to develop flexible and precise models for the path loss in the UAV communication scenarios. e high altitude range of 500 m to 2000 m was con- sidered in [3], and the air-to-ground (AG) channel based on the curved-earth two-ray model was investigated in various scenarios. In [4], a statistical propagation model was proposed for the UAV channel at low altitude in the urban environment, and it was shown that the prediction results were dependent on the elevation angle between the airborne transmitter (Tx) and the receiver (Rx) on the ground. In [5], the impact of the UAV altitude on path loss exponent and shadow fading in the rural scenario was studied. In [6], statistical path loss models were established by modifying the current 3GPP terrestrial channel models for urban macrocell and rural macrocell scenarios. In [7, 8], measurements were Hindawi Wireless Communications and Mobile Computing Volume 2018, Article ID 8489326, 9 pages https://doi.org/10.1155/2018/8489326
Transcript of Air-to-Air Path Loss Prediction Based on Machine...

Research ArticleAir-to-Air Path Loss Prediction Based on Machine LearningMethods in Urban Environments
Yan Zhang Jinxiao Wen Guanshu Yang Zunwen He and Xinran Luo
School of Information and Electronics Beijing Institute of Technology Beijing 100081 China
Correspondence should be addressed to Zunwen He hezunwenbiteducn
Received 6 April 2018 Accepted 14 May 2018 Published 13 June 2018
Academic Editor Liu Liu
Copyright copy 2018 Yan Zhang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Recently unmanned aerial vehicle (UAV) plays an important role in many applications because of its high flexibility and low costTo realize reliable UAV communications a fundamental work is to investigate the propagation characteristics of the channels Inthis paper we propose path loss models for the UAV air-to-air (AA) scenario based on machine learning A ray-tracing softwareis employed to generate samples for multiple routes in a typical urban environment and different altitudes of Tx and Rx UAVs aretaken into consideration Two machine-learning algorithms Random Forest and KNN are exploited to build prediction modelson the basis of the training data The prediction performance of trained models is assessed on the test set according to the metricsincluding the mean absolute error (MAE) and root mean square error (RMSE) Meanwhile two empirical models are presentedfor comparison It is shown that the machine-learning-based models are able to provide high prediction accuracy and acceptablecomputational efficiency in the AA scenario Moreover Random Forest outperforms other models and has the smallest predictionerrors Further investigation is made to evaluate the impacts of five different parameters on the path loss It is demonstrated thatthe path visibility is crucial for the path loss
1 Introduction
In recent years unmanned aerial vehicles (UAVs) as aircraftwithout pilots on board have shown great promise dueto their high mobility and deployment flexibility With thedevelopment of UAV manufacturing its cost is reducedwhile its performance continuously increases As a resultthere are more and more attractive applications for UAVsuch as traffic monitoring emergency rescue forest firedetection cargo transport and so on [1 2] Stable andefficient wireless communication links are indispensable inmost UAV applications Therefore the UAV communicationsplay an important role in the future fifth-generation wirelessnetworks (5G) providing vast coverage and reliable relaying
Meanwhile the propagation environment of UAV-aidedcommunication systems differs from that of traditional oneswhich brings enormous challenges An accurate under-standing of the UAV wireless channels is crucial for thedesign and deployment of these communication systemsThe wireless signals fromto UAVs may be obstructed and
may encounter different propagation conditions along thepath The attenuation of the electromagnetic wave which isusually described by the path loss is of great significancefor the link budget analysis and network planning for UAVcommunications Therefore many works have been finishedto develop flexible and precise models for the path loss in theUAV communication scenarios
The high altitude range of 500m to 2000m was con-sidered in [3] and the air-to-ground (AG) channel basedon the curved-earth two-ray model was investigated invarious scenarios In [4] a statistical propagation model wasproposed for the UAV channel at low altitude in the urbanenvironment and it was shown that the prediction resultswere dependent on the elevation angle between the airbornetransmitter (Tx) and the receiver (Rx) on the ground In[5] the impact of the UAV altitude on path loss exponentand shadow fading in the rural scenario was studied In [6]statistical path loss models were established bymodifying thecurrent 3GPP terrestrial channel models for urban macrocelland rural macrocell scenarios In [7 8] measurements were
HindawiWireless Communications and Mobile ComputingVolume 2018 Article ID 8489326 9 pageshttpsdoiorg10115520188489326
2 Wireless Communications and Mobile Computing
carried out in suburban scenarios and large-scale parametersand multipath components were extracted and analyzed In[9] measurement campaigns were conducted in an urbanscenario and a distance-dependent model was proposed forthe UAV path loss prediction
Most of these aforementioned works are focused on theAG communication An alternative application approach ofUAVs is to use them as both sides of the communication ieair-to-air (AA) communication Until now only a few papershave investigated the channel models in the AA scenarioIn [10] Rice model was extended to derive the AA channelparameters and it was reported that the attenuation caused bythe distance effect followed a free-space model In [11] withdata generated by a ray-tracing software the close-in free-space model and excess fading loss model were adopted tocharacterize the path loss in the AA channel
Furthermore the existing works are mainly based onempirical models such as free-space model and log-distancemodel which rely on data collected in specific propagationscenarios Statistical analysis is performed to build the map-ping relationship between path loss and parameters suchas propagation distance and flight altitude The empiricalmodels are computationally efficient and easy to implementThey can describe the statistical characteristics of the pathloss at a given distance in the measured scenario Howeverthe actual path loss at a specific location cannot be obtainedBesides the accuracy of these models decreases when theyare applied to more general environments [12]
Another candidate solution is to utilize deterministicapproaches such as ray tracing and finite-difference time-domain (FDTD) within which the path loss values arecalculated by applying radio wave propagation mechanismsand numerical analysis techniques to model computationalelectromagnetics With detailed geographic information anddielectric properties of materials these methods are veryaccurate and reliable for predicting the spatial distribution ofelectromagnetic fields Due to the high cost of carrying outmeasurement campaigns the deterministic approaches havebeen widely used for wireless network planning The onlydisadvantage is that the computation procedure consumeshuge time and memory resources and thus it is inappropriateto use these approaches for real-time applications Moreoverthe complicated calculation has to be run again once thepropagation environment changes
Actually path loss modeling is a supervised regressionproblem and can be solved by machine learning [13] It hasbeen proved that machine-learning-based models are ableto provide more accurate path loss prediction results thanthe empirical ones and are more computationally efficientthan the deterministic approaches [12] Different algorithmshave been adopted to train prediction models in traditionalterrestrial communication scenarios For example artificialneural networks (ANNs) were used for path loss predictionin urban [14] suburban [15] rural [16] and railway [17]scenarios Support vector regression (SVR) was applied forthe prediction of path loss in suburban environment in [18]In order to build a connectivity model for an environmentalwireless sensor network several methods including RandomForest Adaboost ANNs and K-Nearest-Neighbors (KNN)
were analyzed and compared in [13] It was reported that Ran-dom Forest performed better than others for the consideredcomplex terrain environments
In this paper we build the prediction models for pathloss in the AA scenario based on machine learning Twoalgorithms Random Forest and KNN are taken into consid-eration To evaluate the feasibility of the proposed modelsthe ray-tracing approach is used to generate data for trainingand testing purposes In addition the prediction accuracies ofmachine-learning-based models are compared with those ofthe empirical ones such as the Stanford University Interim(SUI) model [19] and the COST231-W-I model [20] It isshown that the proposed models outperform the empiricalones Furthermore we analyze the commonly used parame-ters related to the path loss in the AA scenario including thepropagation distance TxUAValtitude RxUAV altitude pathvisibility and elevation angle Meanwhile the importance ofthese parameters is discussed
We summarize the major contributions and novelties ofthis paper as follows(1)The path loss for the UAV communication in the AAscenario is modeled based on machine learning methodsincluding Random Forest and KNN algorithms(2) The prediction results are evaluated with the datagenerated by a ray-tracing software It is proved that themachine-learning-based models are able to provide betteraccuracy than the empirical ones(3)We analyze the impacts of different parameters on theAA path loss and sort these parameters by their importance
The remainder of this paper is organized as followsThe considered AA propagation environment and the ray-tracing-based data generation are described in Section 2Section 3 presents the machine-learning-based methodsfor path loss prediction The model training procedure isintroduced in Section 4 In Section 5 the performance ofmachine-learning-based models is evaluated and the impor-tance ranking of different parameters is discussed At lastconclusions are drawn in Section 6
2 Propagation Environment Description
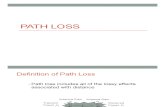
In order to investigate the path lossmodel in the AA scenariowe consider a typical urban environment in which two UAVsare employed as Tx and Rx As a new emerging scenariomeasurements for AA communications are still in a verypreliminary stage Since the machine-learning-based modelsrequire a large amount of data for training purpose a ray-tracing software is employed to generate data for modelbuilding and performance evaluation It has been provedthat the channel data obtained by the ray-tracing softwareare in good agreement with the actual measured values [21]As illustrated in Figure 1 the considered environment is aregion in Helsinki with dimensions of 1000m by 600mGray areas and green areas indicate buildings and groundsrespectively The maximum height of the buildings is 50mAll the buildings are assumed to be made of concrete withthe following dielectric half-space properties permittivity 6conductivity 002 and thickness 03m The material of the
Wireless Communications and Mobile Computing 3
TxRoute 1
Route 2
Route 3
Route 4
Route 6
Route 5
Figure 1 Urban environment for AA communications
ground surface is assigned as asphalt whose permittivity is 10and conductivity is 001
The simulations were performed at the central frequencyof 24GHz with a bandwidth of 100MHz The red square inFigure 1 represented the position of the Tx UAV which wasequipped with a directional antenna Rx UAV was moved ata spacing of 2m along six different routes Different flightaltitudes were taken into account for both Tx and Rx UAVsThe altitudes of the Tx UAV included 60m 70m and 80mMeanwhile Rx UAV were assumed to fly at heights of 10m20m 30m and 40m lower than the maximum height of thebuildings It should be noted that the direct reflected anddiffracted paths were considered whereas the penetrationpaths were neglected because of the high attenuation throughbuilding Details of the parameter setting can be found inTable 1
Through calculations we obtain the spatial distribution ofreceived powers Then path loss values at different locationscan be extracted In practice the path loss in the AA scenariois related to many environmental parameters The goal ofthe machine learning method is to find the optimal functiondescribing the relationship between these parameters and thepath loss In the following analysis five parameters whichhave impacts on the path loss are selected as the input featuresof the machine-learning-based models and they are listed asfollows
(1) Propagation distance (119889 in meter) the distancebetween the Tx and Rx UAVs calculated from theircoordinates
(2) Tx altitude (ℎ119905 in meter) the height of Tx UAV from
the ground with three values of 50m 60m and 70m
Table 1 Parameter configuration
Parameter ValueEnvironment Helsinki urban scenarioArea 1000 m times 600 mMax building height 50 mCarrier frequency 24 GHzBandwidth 100 MHzTransmit power 15 dBmTx altitude 60 70 80 mRx altitude 10 20 30 40 mDistance between adjacent Rx positions 2 mNumber of Tx locations 1 times 3Number of Rx locations 405 times 4Max number of reflection 10Max number of diffraction 1Max penetration Not simulated
(3) Rx altitude (ℎ119903 in meter) the height of Rx UAV from
the ground with four values of 10m 20m 30m and40m
(4) Path visibility (119868V 0 or 1) parameter indicatingwhether there exists line-of-sight (LOS) path betweenthe Tx and Rx UAVs 119868V = 1 for the LOS case and119868V = 0 for the non-line-of-sight (NLOS) case
(5) Elevation angle (120579 minus1205872 to 1205872) the angle betweenthe LOS path and the horizontal
We collected all the samples when the Tx UAV was indifferent altitudes and the Rx UAV flied along six routes at
4 Wireless Communications and Mobile Computing
InputTraining set119883 = x
1 x2 sdot sdot sdot x
119873 with responses 119884 = 119875119871
1 1198751198712 sdot sdot sdot 119875119871
119873 where x
119894= (119889119894 ℎ119905119894 ℎ119903119894 119868V119894 120579119894) 119894 = 1 119873
Number of ensemble members 119879Training Process
For 119905 = 1 to 119879(1) Take a bootstrap sample 119883119905 119884119905 of size119873 from 119883 119884(2) Use 119883
119905 119884119905 as the training data to train the 119905th ensemble member by using binary recursive partitioning(3) Repeat the following steps recursively for each unsplit node until the stopping criterion is met(i) Select119898 features randomly from the 119891 available features (119891 = 5 in this study)(ii) Calculate the square error for each possible splitting point of each feature and find the best binary split
among all binary splits on the119898 features(iii) Split the node into two descendant nodes using the best splitPrediction
Given a new x = (119889 ℎ119905 ℎ119903 119868V 120579) the predicted path loss value is obtained by 1198751198711015840 = (1119879)sum119879
119905=1ℎ119905(x) where ℎ
119905(x)
is the prediction of the 119905th ensemble member
Algorithm 1 Random Forest algorithm for path loss prediction in the AA scenario
different heights Each sample was with an output (path lossvalue) and five input features Removing the locations wherethe received signals are too weak to detect we obtained 5508samples in total Then these samples were separated into twoset training set and test set The former were utilized to trainthe models while the latter were employed to evaluate theperformance of the trained models
3 Machine-Learning-Based Models for AAPath Loss Prediction
Machine learning is a method to improve performance ona specific task based on extensive data and a flexible modelarchitecture In recent years it has been widely used in manyfields like computer vision speech recognition autonomousdriving and so on Machine learning tasks can be broadlyclassified into supervised learning and unsupervised learn-ing depending on whether data samples have labels or notFor supervised learning tasks can be further divided intoclassification problems and regression problems based onwhether the predicted values are discrete or continuous TheAApath loss prediction is a typical regression task which canbe solved bymany algorithms such as Random Forest ANNand SVR We aim to build the path loss prediction model inthe AA scenario based on machine learning With given pathloss values and corresponding input features the model canbe trained and then the path loss values in new conditions canbe predicted with the various inputs
In this study two typical supervised learning algorithmsRandom Forest and KNN are chosen to build predictionmodels for the AA path loss Their performance evaluationresults will be compared in Section 5 and Random Forestwill be proved to have a better agreement with the test datacompared with KNN The major principles of these twoalgorithms are introduced as follows
31 Random Forest Ensemble learning which uses multipleindividual learners to solve classification and regression prob-lems can achieve a significantly superior generalization per-formance [22] Random Forest is a commonly used ensemble
learning algorithm and employs decision tree as ensemblemember It applies bootstrap aggregating to select trainingsamples for each ensemble member Ensemble members aretrained based on these samples and then the final resultis obtained by averaging the results of all the ensemblemembers
Besides RandomForest further introduces random selec-tion of features in the decision tree training process Usuallythe traditional decision tree selects an optimal feature fromthe feature set of current node for split For Random Forest asubset is randomly chosen from the feature set of each nodeand then the optimal feature is selected from this subset
In ensemble learning the greater the diversity of ensem-ble members the better the prediction performance Byintroducing sample perturbations and feature perturbationsthe diversity of ensemble members in Random Forest isincreased It can improve the generalization performance ofthe model It is worth noting that the decision trees growwithout pruning due to the randomness of samples andfeatures Algorithm 1 shows the method we used for path lossprediction in the AA scenario The detailed descriptions ofRandom Forest can be found in [23]
Random Forest is easy to implement and can realizeparallel computing It is also insensitive to input data and canhandle thousands of input features In addition an importantadvantage of Random Forest is that it can sort the importanceof features In the following we will use this property toanalyze the significance of different input features for the AApath loss
32 KNN KNN is a classical machine learning algorithmthat is often used to solve classification problems It has noexplicit training process and its implementation is simpleThemechanism of KNN is to find the 119896 training samples closestto the sample to be predicted based on a distance metricand then to perform prediction based on the information ofthese 119896 neighbors It is also suitable for regression tasks byaveraging the values of 119896 neighbors to get the final predictionresult
Wireless Communications and Mobile Computing 5
The distance metric plays a very important role in KNNThe distance reflects the difference between two samplesCommonly used distance metrics include Manhattan dis-tance Euclidean distance and so on In this study Euclideandistance is chosen for analysis In general features havedifferent ranges of values and their influences on the distancecalculation are not the same As a result KNN algorithmis more sensitive to the input data compared with RandomForest For the sake of fairness the samples need to benormalized before model training In this study 119885-scorenormalization method is adopted and it can be expressedas
119909119873= 119909119894 minus 120583120590 (1)
where119909119894is the input value of the feature 119909
119873is the normalized
value 120583 is the mean and 120590 is the standard deviation
4 Model Training and Accuracy Metrics
The procedure of machine-learning-based path loss predic-tors for AA channel is introduced as follows Firstly wecollect enough data samples for analysis each with pathloss record and corresponding input features As mentionedabove for KNN the features need to be scaled by thenormalization process while for Random Forest it is notnecessary Secondly these samples can be divided into twocategories training set and test set which are used for modeltraining and evaluation purposes respectively Thirdly basedon the training data and selected algorithms we train themodel and tune its parameters Finally some metrics areemployed to assess the prediction accuracy of the trainedmodel and then in view of the evaluated results we canfurther improve the machine-learning-based predictor forthe path loss in the AA scenario
In this section we will introduce the division of trainingset and test set Then the model training process is explainedin detail In addition accuracy metrics for model validationare presented
41 Data Division The performance of the machine-learning-based models strongly depends on the amount andquality of training data In general more training sampleslead to more accurate reflections of the inherent laws Thuswe must try to obtain enough samples in order to getaccurate models for path loss prediction In addition therules extracted from the model training are hidden in thesamples so the training samples must be representativeDifferent from the training data the test set is used to assessand further improve the trained models
As aforementioned 5508 samples were collected in theconsidered AA scenario including samples from six routes atall different TxRx altitudes In this study the samples fromthe third route with the Rx altitudes of 20m and 30m wereused for test purpose and they did not participate in thetraining processThe remaining samples were included in thetraining set Then the proportions of the training samplesand test ones were 84 and 16
42 Model Training Model training aims at acquiringparameters for the model to optimize the performance andeffectiveness of the path loss prediction Some machinelearning algorithms such as ANN and SVR have manyparameters whose values need to be set before the learningprocess begins In contrast Random Forest and KNN haveonly a few parameters that need to be tuned and thus they areboth efficient for implementation
For Random Forest the model accuracy is affected by theparameters including maximum tree depth and the numberof ensemble members The former controls the maximumsplit number of the decision tree and the latter determines thesize of the ensemble Generally a small ensemble with deepdecision trees has a greater tendency to overfit than a shallowensemble of many decision trees [13]
For KNN the number of neighbors 119896 is determinis-tic for the prediction performance If 119896 is too small themodel becomes complicated and may overlearn when theneighboring points are noises Meanwhile large 119896makes themodel structure simple but neighboring samples with largedifferences will affect the prediction result
These aforementioned parameters cannot be learneddirectly from the data The optimization methods for tuningparameters mainly include grid search random search andBayesian optimization In this study grid search is used tofind the optimal combination of parameters by searching allpossible points in the given range For Random Forest weevaluate the following parameters the number of ensemblemembers between 10 and 200 (at 10-unit intervals) and themaximum tree depths between 5 and 50 (at 5-unit intervals)For KNN the value of 119896 is set between 2 to 10 with the intervalof 1 The obtained parameters are as follows For RandomForest the depth of trees and the number of ensemblemembers are finally set as 30 and 140 respectively Thenumber of neighbors is equal to 5 in KNN
43 Metrics for Evaluating Prediction Accuracy To evaluatethe performance of different models two statistical proper-ties mean absolute error (MAE) and root mean square error(RMSE) [24] are chosen as metrics They can be calculatedby comparing the predicted path loss with the data in the testset as
MAE = 1119868119868sum119894=1
10038161003816100381610038161003816119875119871 119894 minus 119875119871 119894101584010038161003816100381610038161003816 (2)
RMSE = radic 1119868119868sum119894=1
(119875119871119894minus 119875119871119894
1015840)2 (3)
where 119868 is the total number of test samples 119875119871 119894 is the pathloss value of the 119894th sample in the test set and 119875119871
119894
1015840 is thepredicted value
5 Model Validation and Results
In this section we will evaluate the performance of thesemachine-learning-based models in the AA scenario Twoempirical models are also considered for comparison In
6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Wireless Communications and Mobile Computing
carried out in suburban scenarios and large-scale parametersand multipath components were extracted and analyzed In[9] measurement campaigns were conducted in an urbanscenario and a distance-dependent model was proposed forthe UAV path loss prediction
Most of these aforementioned works are focused on theAG communication An alternative application approach ofUAVs is to use them as both sides of the communication ieair-to-air (AA) communication Until now only a few papershave investigated the channel models in the AA scenarioIn [10] Rice model was extended to derive the AA channelparameters and it was reported that the attenuation caused bythe distance effect followed a free-space model In [11] withdata generated by a ray-tracing software the close-in free-space model and excess fading loss model were adopted tocharacterize the path loss in the AA channel
Furthermore the existing works are mainly based onempirical models such as free-space model and log-distancemodel which rely on data collected in specific propagationscenarios Statistical analysis is performed to build the map-ping relationship between path loss and parameters suchas propagation distance and flight altitude The empiricalmodels are computationally efficient and easy to implementThey can describe the statistical characteristics of the pathloss at a given distance in the measured scenario Howeverthe actual path loss at a specific location cannot be obtainedBesides the accuracy of these models decreases when theyare applied to more general environments [12]
Another candidate solution is to utilize deterministicapproaches such as ray tracing and finite-difference time-domain (FDTD) within which the path loss values arecalculated by applying radio wave propagation mechanismsand numerical analysis techniques to model computationalelectromagnetics With detailed geographic information anddielectric properties of materials these methods are veryaccurate and reliable for predicting the spatial distribution ofelectromagnetic fields Due to the high cost of carrying outmeasurement campaigns the deterministic approaches havebeen widely used for wireless network planning The onlydisadvantage is that the computation procedure consumeshuge time and memory resources and thus it is inappropriateto use these approaches for real-time applications Moreoverthe complicated calculation has to be run again once thepropagation environment changes
Actually path loss modeling is a supervised regressionproblem and can be solved by machine learning [13] It hasbeen proved that machine-learning-based models are ableto provide more accurate path loss prediction results thanthe empirical ones and are more computationally efficientthan the deterministic approaches [12] Different algorithmshave been adopted to train prediction models in traditionalterrestrial communication scenarios For example artificialneural networks (ANNs) were used for path loss predictionin urban [14] suburban [15] rural [16] and railway [17]scenarios Support vector regression (SVR) was applied forthe prediction of path loss in suburban environment in [18]In order to build a connectivity model for an environmentalwireless sensor network several methods including RandomForest Adaboost ANNs and K-Nearest-Neighbors (KNN)
were analyzed and compared in [13] It was reported that Ran-dom Forest performed better than others for the consideredcomplex terrain environments
In this paper we build the prediction models for pathloss in the AA scenario based on machine learning Twoalgorithms Random Forest and KNN are taken into consid-eration To evaluate the feasibility of the proposed modelsthe ray-tracing approach is used to generate data for trainingand testing purposes In addition the prediction accuracies ofmachine-learning-based models are compared with those ofthe empirical ones such as the Stanford University Interim(SUI) model [19] and the COST231-W-I model [20] It isshown that the proposed models outperform the empiricalones Furthermore we analyze the commonly used parame-ters related to the path loss in the AA scenario including thepropagation distance TxUAValtitude RxUAV altitude pathvisibility and elevation angle Meanwhile the importance ofthese parameters is discussed
We summarize the major contributions and novelties ofthis paper as follows(1)The path loss for the UAV communication in the AAscenario is modeled based on machine learning methodsincluding Random Forest and KNN algorithms(2) The prediction results are evaluated with the datagenerated by a ray-tracing software It is proved that themachine-learning-based models are able to provide betteraccuracy than the empirical ones(3)We analyze the impacts of different parameters on theAA path loss and sort these parameters by their importance
The remainder of this paper is organized as followsThe considered AA propagation environment and the ray-tracing-based data generation are described in Section 2Section 3 presents the machine-learning-based methodsfor path loss prediction The model training procedure isintroduced in Section 4 In Section 5 the performance ofmachine-learning-based models is evaluated and the impor-tance ranking of different parameters is discussed At lastconclusions are drawn in Section 6
2 Propagation Environment Description
In order to investigate the path lossmodel in the AA scenariowe consider a typical urban environment in which two UAVsare employed as Tx and Rx As a new emerging scenariomeasurements for AA communications are still in a verypreliminary stage Since the machine-learning-based modelsrequire a large amount of data for training purpose a ray-tracing software is employed to generate data for modelbuilding and performance evaluation It has been provedthat the channel data obtained by the ray-tracing softwareare in good agreement with the actual measured values [21]As illustrated in Figure 1 the considered environment is aregion in Helsinki with dimensions of 1000m by 600mGray areas and green areas indicate buildings and groundsrespectively The maximum height of the buildings is 50mAll the buildings are assumed to be made of concrete withthe following dielectric half-space properties permittivity 6conductivity 002 and thickness 03m The material of the
Wireless Communications and Mobile Computing 3
TxRoute 1
Route 2
Route 3
Route 4
Route 6
Route 5
Figure 1 Urban environment for AA communications
ground surface is assigned as asphalt whose permittivity is 10and conductivity is 001
The simulations were performed at the central frequencyof 24GHz with a bandwidth of 100MHz The red square inFigure 1 represented the position of the Tx UAV which wasequipped with a directional antenna Rx UAV was moved ata spacing of 2m along six different routes Different flightaltitudes were taken into account for both Tx and Rx UAVsThe altitudes of the Tx UAV included 60m 70m and 80mMeanwhile Rx UAV were assumed to fly at heights of 10m20m 30m and 40m lower than the maximum height of thebuildings It should be noted that the direct reflected anddiffracted paths were considered whereas the penetrationpaths were neglected because of the high attenuation throughbuilding Details of the parameter setting can be found inTable 1
Through calculations we obtain the spatial distribution ofreceived powers Then path loss values at different locationscan be extracted In practice the path loss in the AA scenariois related to many environmental parameters The goal ofthe machine learning method is to find the optimal functiondescribing the relationship between these parameters and thepath loss In the following analysis five parameters whichhave impacts on the path loss are selected as the input featuresof the machine-learning-based models and they are listed asfollows
(1) Propagation distance (119889 in meter) the distancebetween the Tx and Rx UAVs calculated from theircoordinates
(2) Tx altitude (ℎ119905 in meter) the height of Tx UAV from
the ground with three values of 50m 60m and 70m
Table 1 Parameter configuration
Parameter ValueEnvironment Helsinki urban scenarioArea 1000 m times 600 mMax building height 50 mCarrier frequency 24 GHzBandwidth 100 MHzTransmit power 15 dBmTx altitude 60 70 80 mRx altitude 10 20 30 40 mDistance between adjacent Rx positions 2 mNumber of Tx locations 1 times 3Number of Rx locations 405 times 4Max number of reflection 10Max number of diffraction 1Max penetration Not simulated
(3) Rx altitude (ℎ119903 in meter) the height of Rx UAV from
the ground with four values of 10m 20m 30m and40m
(4) Path visibility (119868V 0 or 1) parameter indicatingwhether there exists line-of-sight (LOS) path betweenthe Tx and Rx UAVs 119868V = 1 for the LOS case and119868V = 0 for the non-line-of-sight (NLOS) case
(5) Elevation angle (120579 minus1205872 to 1205872) the angle betweenthe LOS path and the horizontal
We collected all the samples when the Tx UAV was indifferent altitudes and the Rx UAV flied along six routes at
4 Wireless Communications and Mobile Computing
InputTraining set119883 = x
1 x2 sdot sdot sdot x
119873 with responses 119884 = 119875119871
1 1198751198712 sdot sdot sdot 119875119871
119873 where x
119894= (119889119894 ℎ119905119894 ℎ119903119894 119868V119894 120579119894) 119894 = 1 119873
Number of ensemble members 119879Training Process
For 119905 = 1 to 119879(1) Take a bootstrap sample 119883119905 119884119905 of size119873 from 119883 119884(2) Use 119883
119905 119884119905 as the training data to train the 119905th ensemble member by using binary recursive partitioning(3) Repeat the following steps recursively for each unsplit node until the stopping criterion is met(i) Select119898 features randomly from the 119891 available features (119891 = 5 in this study)(ii) Calculate the square error for each possible splitting point of each feature and find the best binary split
among all binary splits on the119898 features(iii) Split the node into two descendant nodes using the best splitPrediction
Given a new x = (119889 ℎ119905 ℎ119903 119868V 120579) the predicted path loss value is obtained by 1198751198711015840 = (1119879)sum119879
119905=1ℎ119905(x) where ℎ
119905(x)
is the prediction of the 119905th ensemble member
Algorithm 1 Random Forest algorithm for path loss prediction in the AA scenario
different heights Each sample was with an output (path lossvalue) and five input features Removing the locations wherethe received signals are too weak to detect we obtained 5508samples in total Then these samples were separated into twoset training set and test set The former were utilized to trainthe models while the latter were employed to evaluate theperformance of the trained models
3 Machine-Learning-Based Models for AAPath Loss Prediction
Machine learning is a method to improve performance ona specific task based on extensive data and a flexible modelarchitecture In recent years it has been widely used in manyfields like computer vision speech recognition autonomousdriving and so on Machine learning tasks can be broadlyclassified into supervised learning and unsupervised learn-ing depending on whether data samples have labels or notFor supervised learning tasks can be further divided intoclassification problems and regression problems based onwhether the predicted values are discrete or continuous TheAApath loss prediction is a typical regression task which canbe solved bymany algorithms such as Random Forest ANNand SVR We aim to build the path loss prediction model inthe AA scenario based on machine learning With given pathloss values and corresponding input features the model canbe trained and then the path loss values in new conditions canbe predicted with the various inputs
In this study two typical supervised learning algorithmsRandom Forest and KNN are chosen to build predictionmodels for the AA path loss Their performance evaluationresults will be compared in Section 5 and Random Forestwill be proved to have a better agreement with the test datacompared with KNN The major principles of these twoalgorithms are introduced as follows
31 Random Forest Ensemble learning which uses multipleindividual learners to solve classification and regression prob-lems can achieve a significantly superior generalization per-formance [22] Random Forest is a commonly used ensemble
learning algorithm and employs decision tree as ensemblemember It applies bootstrap aggregating to select trainingsamples for each ensemble member Ensemble members aretrained based on these samples and then the final resultis obtained by averaging the results of all the ensemblemembers
Besides RandomForest further introduces random selec-tion of features in the decision tree training process Usuallythe traditional decision tree selects an optimal feature fromthe feature set of current node for split For Random Forest asubset is randomly chosen from the feature set of each nodeand then the optimal feature is selected from this subset
In ensemble learning the greater the diversity of ensem-ble members the better the prediction performance Byintroducing sample perturbations and feature perturbationsthe diversity of ensemble members in Random Forest isincreased It can improve the generalization performance ofthe model It is worth noting that the decision trees growwithout pruning due to the randomness of samples andfeatures Algorithm 1 shows the method we used for path lossprediction in the AA scenario The detailed descriptions ofRandom Forest can be found in [23]
Random Forest is easy to implement and can realizeparallel computing It is also insensitive to input data and canhandle thousands of input features In addition an importantadvantage of Random Forest is that it can sort the importanceof features In the following we will use this property toanalyze the significance of different input features for the AApath loss
32 KNN KNN is a classical machine learning algorithmthat is often used to solve classification problems It has noexplicit training process and its implementation is simpleThemechanism of KNN is to find the 119896 training samples closestto the sample to be predicted based on a distance metricand then to perform prediction based on the information ofthese 119896 neighbors It is also suitable for regression tasks byaveraging the values of 119896 neighbors to get the final predictionresult
Wireless Communications and Mobile Computing 5
The distance metric plays a very important role in KNNThe distance reflects the difference between two samplesCommonly used distance metrics include Manhattan dis-tance Euclidean distance and so on In this study Euclideandistance is chosen for analysis In general features havedifferent ranges of values and their influences on the distancecalculation are not the same As a result KNN algorithmis more sensitive to the input data compared with RandomForest For the sake of fairness the samples need to benormalized before model training In this study 119885-scorenormalization method is adopted and it can be expressedas
119909119873= 119909119894 minus 120583120590 (1)
where119909119894is the input value of the feature 119909
119873is the normalized
value 120583 is the mean and 120590 is the standard deviation
4 Model Training and Accuracy Metrics
The procedure of machine-learning-based path loss predic-tors for AA channel is introduced as follows Firstly wecollect enough data samples for analysis each with pathloss record and corresponding input features As mentionedabove for KNN the features need to be scaled by thenormalization process while for Random Forest it is notnecessary Secondly these samples can be divided into twocategories training set and test set which are used for modeltraining and evaluation purposes respectively Thirdly basedon the training data and selected algorithms we train themodel and tune its parameters Finally some metrics areemployed to assess the prediction accuracy of the trainedmodel and then in view of the evaluated results we canfurther improve the machine-learning-based predictor forthe path loss in the AA scenario
In this section we will introduce the division of trainingset and test set Then the model training process is explainedin detail In addition accuracy metrics for model validationare presented
41 Data Division The performance of the machine-learning-based models strongly depends on the amount andquality of training data In general more training sampleslead to more accurate reflections of the inherent laws Thuswe must try to obtain enough samples in order to getaccurate models for path loss prediction In addition therules extracted from the model training are hidden in thesamples so the training samples must be representativeDifferent from the training data the test set is used to assessand further improve the trained models
As aforementioned 5508 samples were collected in theconsidered AA scenario including samples from six routes atall different TxRx altitudes In this study the samples fromthe third route with the Rx altitudes of 20m and 30m wereused for test purpose and they did not participate in thetraining processThe remaining samples were included in thetraining set Then the proportions of the training samplesand test ones were 84 and 16
42 Model Training Model training aims at acquiringparameters for the model to optimize the performance andeffectiveness of the path loss prediction Some machinelearning algorithms such as ANN and SVR have manyparameters whose values need to be set before the learningprocess begins In contrast Random Forest and KNN haveonly a few parameters that need to be tuned and thus they areboth efficient for implementation
For Random Forest the model accuracy is affected by theparameters including maximum tree depth and the numberof ensemble members The former controls the maximumsplit number of the decision tree and the latter determines thesize of the ensemble Generally a small ensemble with deepdecision trees has a greater tendency to overfit than a shallowensemble of many decision trees [13]
For KNN the number of neighbors 119896 is determinis-tic for the prediction performance If 119896 is too small themodel becomes complicated and may overlearn when theneighboring points are noises Meanwhile large 119896makes themodel structure simple but neighboring samples with largedifferences will affect the prediction result
These aforementioned parameters cannot be learneddirectly from the data The optimization methods for tuningparameters mainly include grid search random search andBayesian optimization In this study grid search is used tofind the optimal combination of parameters by searching allpossible points in the given range For Random Forest weevaluate the following parameters the number of ensemblemembers between 10 and 200 (at 10-unit intervals) and themaximum tree depths between 5 and 50 (at 5-unit intervals)For KNN the value of 119896 is set between 2 to 10 with the intervalof 1 The obtained parameters are as follows For RandomForest the depth of trees and the number of ensemblemembers are finally set as 30 and 140 respectively Thenumber of neighbors is equal to 5 in KNN
43 Metrics for Evaluating Prediction Accuracy To evaluatethe performance of different models two statistical proper-ties mean absolute error (MAE) and root mean square error(RMSE) [24] are chosen as metrics They can be calculatedby comparing the predicted path loss with the data in the testset as
MAE = 1119868119868sum119894=1
10038161003816100381610038161003816119875119871 119894 minus 119875119871 119894101584010038161003816100381610038161003816 (2)
RMSE = radic 1119868119868sum119894=1
(119875119871119894minus 119875119871119894
1015840)2 (3)
where 119868 is the total number of test samples 119875119871 119894 is the pathloss value of the 119894th sample in the test set and 119875119871
119894
1015840 is thepredicted value
5 Model Validation and Results
In this section we will evaluate the performance of thesemachine-learning-based models in the AA scenario Twoempirical models are also considered for comparison In
6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 3
TxRoute 1
Route 2
Route 3
Route 4
Route 6
Route 5
Figure 1 Urban environment for AA communications
ground surface is assigned as asphalt whose permittivity is 10and conductivity is 001
The simulations were performed at the central frequencyof 24GHz with a bandwidth of 100MHz The red square inFigure 1 represented the position of the Tx UAV which wasequipped with a directional antenna Rx UAV was moved ata spacing of 2m along six different routes Different flightaltitudes were taken into account for both Tx and Rx UAVsThe altitudes of the Tx UAV included 60m 70m and 80mMeanwhile Rx UAV were assumed to fly at heights of 10m20m 30m and 40m lower than the maximum height of thebuildings It should be noted that the direct reflected anddiffracted paths were considered whereas the penetrationpaths were neglected because of the high attenuation throughbuilding Details of the parameter setting can be found inTable 1
Through calculations we obtain the spatial distribution ofreceived powers Then path loss values at different locationscan be extracted In practice the path loss in the AA scenariois related to many environmental parameters The goal ofthe machine learning method is to find the optimal functiondescribing the relationship between these parameters and thepath loss In the following analysis five parameters whichhave impacts on the path loss are selected as the input featuresof the machine-learning-based models and they are listed asfollows
(1) Propagation distance (119889 in meter) the distancebetween the Tx and Rx UAVs calculated from theircoordinates
(2) Tx altitude (ℎ119905 in meter) the height of Tx UAV from
the ground with three values of 50m 60m and 70m
Table 1 Parameter configuration
Parameter ValueEnvironment Helsinki urban scenarioArea 1000 m times 600 mMax building height 50 mCarrier frequency 24 GHzBandwidth 100 MHzTransmit power 15 dBmTx altitude 60 70 80 mRx altitude 10 20 30 40 mDistance between adjacent Rx positions 2 mNumber of Tx locations 1 times 3Number of Rx locations 405 times 4Max number of reflection 10Max number of diffraction 1Max penetration Not simulated
(3) Rx altitude (ℎ119903 in meter) the height of Rx UAV from
the ground with four values of 10m 20m 30m and40m
(4) Path visibility (119868V 0 or 1) parameter indicatingwhether there exists line-of-sight (LOS) path betweenthe Tx and Rx UAVs 119868V = 1 for the LOS case and119868V = 0 for the non-line-of-sight (NLOS) case
(5) Elevation angle (120579 minus1205872 to 1205872) the angle betweenthe LOS path and the horizontal
We collected all the samples when the Tx UAV was indifferent altitudes and the Rx UAV flied along six routes at
4 Wireless Communications and Mobile Computing
InputTraining set119883 = x
1 x2 sdot sdot sdot x
119873 with responses 119884 = 119875119871
1 1198751198712 sdot sdot sdot 119875119871
119873 where x
119894= (119889119894 ℎ119905119894 ℎ119903119894 119868V119894 120579119894) 119894 = 1 119873
Number of ensemble members 119879Training Process
For 119905 = 1 to 119879(1) Take a bootstrap sample 119883119905 119884119905 of size119873 from 119883 119884(2) Use 119883
119905 119884119905 as the training data to train the 119905th ensemble member by using binary recursive partitioning(3) Repeat the following steps recursively for each unsplit node until the stopping criterion is met(i) Select119898 features randomly from the 119891 available features (119891 = 5 in this study)(ii) Calculate the square error for each possible splitting point of each feature and find the best binary split
among all binary splits on the119898 features(iii) Split the node into two descendant nodes using the best splitPrediction
Given a new x = (119889 ℎ119905 ℎ119903 119868V 120579) the predicted path loss value is obtained by 1198751198711015840 = (1119879)sum119879
119905=1ℎ119905(x) where ℎ
119905(x)
is the prediction of the 119905th ensemble member
Algorithm 1 Random Forest algorithm for path loss prediction in the AA scenario
different heights Each sample was with an output (path lossvalue) and five input features Removing the locations wherethe received signals are too weak to detect we obtained 5508samples in total Then these samples were separated into twoset training set and test set The former were utilized to trainthe models while the latter were employed to evaluate theperformance of the trained models
3 Machine-Learning-Based Models for AAPath Loss Prediction
Machine learning is a method to improve performance ona specific task based on extensive data and a flexible modelarchitecture In recent years it has been widely used in manyfields like computer vision speech recognition autonomousdriving and so on Machine learning tasks can be broadlyclassified into supervised learning and unsupervised learn-ing depending on whether data samples have labels or notFor supervised learning tasks can be further divided intoclassification problems and regression problems based onwhether the predicted values are discrete or continuous TheAApath loss prediction is a typical regression task which canbe solved bymany algorithms such as Random Forest ANNand SVR We aim to build the path loss prediction model inthe AA scenario based on machine learning With given pathloss values and corresponding input features the model canbe trained and then the path loss values in new conditions canbe predicted with the various inputs
In this study two typical supervised learning algorithmsRandom Forest and KNN are chosen to build predictionmodels for the AA path loss Their performance evaluationresults will be compared in Section 5 and Random Forestwill be proved to have a better agreement with the test datacompared with KNN The major principles of these twoalgorithms are introduced as follows
31 Random Forest Ensemble learning which uses multipleindividual learners to solve classification and regression prob-lems can achieve a significantly superior generalization per-formance [22] Random Forest is a commonly used ensemble
learning algorithm and employs decision tree as ensemblemember It applies bootstrap aggregating to select trainingsamples for each ensemble member Ensemble members aretrained based on these samples and then the final resultis obtained by averaging the results of all the ensemblemembers
Besides RandomForest further introduces random selec-tion of features in the decision tree training process Usuallythe traditional decision tree selects an optimal feature fromthe feature set of current node for split For Random Forest asubset is randomly chosen from the feature set of each nodeand then the optimal feature is selected from this subset
In ensemble learning the greater the diversity of ensem-ble members the better the prediction performance Byintroducing sample perturbations and feature perturbationsthe diversity of ensemble members in Random Forest isincreased It can improve the generalization performance ofthe model It is worth noting that the decision trees growwithout pruning due to the randomness of samples andfeatures Algorithm 1 shows the method we used for path lossprediction in the AA scenario The detailed descriptions ofRandom Forest can be found in [23]
Random Forest is easy to implement and can realizeparallel computing It is also insensitive to input data and canhandle thousands of input features In addition an importantadvantage of Random Forest is that it can sort the importanceof features In the following we will use this property toanalyze the significance of different input features for the AApath loss
32 KNN KNN is a classical machine learning algorithmthat is often used to solve classification problems It has noexplicit training process and its implementation is simpleThemechanism of KNN is to find the 119896 training samples closestto the sample to be predicted based on a distance metricand then to perform prediction based on the information ofthese 119896 neighbors It is also suitable for regression tasks byaveraging the values of 119896 neighbors to get the final predictionresult
Wireless Communications and Mobile Computing 5
The distance metric plays a very important role in KNNThe distance reflects the difference between two samplesCommonly used distance metrics include Manhattan dis-tance Euclidean distance and so on In this study Euclideandistance is chosen for analysis In general features havedifferent ranges of values and their influences on the distancecalculation are not the same As a result KNN algorithmis more sensitive to the input data compared with RandomForest For the sake of fairness the samples need to benormalized before model training In this study 119885-scorenormalization method is adopted and it can be expressedas
119909119873= 119909119894 minus 120583120590 (1)
where119909119894is the input value of the feature 119909
119873is the normalized
value 120583 is the mean and 120590 is the standard deviation
4 Model Training and Accuracy Metrics
The procedure of machine-learning-based path loss predic-tors for AA channel is introduced as follows Firstly wecollect enough data samples for analysis each with pathloss record and corresponding input features As mentionedabove for KNN the features need to be scaled by thenormalization process while for Random Forest it is notnecessary Secondly these samples can be divided into twocategories training set and test set which are used for modeltraining and evaluation purposes respectively Thirdly basedon the training data and selected algorithms we train themodel and tune its parameters Finally some metrics areemployed to assess the prediction accuracy of the trainedmodel and then in view of the evaluated results we canfurther improve the machine-learning-based predictor forthe path loss in the AA scenario
In this section we will introduce the division of trainingset and test set Then the model training process is explainedin detail In addition accuracy metrics for model validationare presented
41 Data Division The performance of the machine-learning-based models strongly depends on the amount andquality of training data In general more training sampleslead to more accurate reflections of the inherent laws Thuswe must try to obtain enough samples in order to getaccurate models for path loss prediction In addition therules extracted from the model training are hidden in thesamples so the training samples must be representativeDifferent from the training data the test set is used to assessand further improve the trained models
As aforementioned 5508 samples were collected in theconsidered AA scenario including samples from six routes atall different TxRx altitudes In this study the samples fromthe third route with the Rx altitudes of 20m and 30m wereused for test purpose and they did not participate in thetraining processThe remaining samples were included in thetraining set Then the proportions of the training samplesand test ones were 84 and 16
42 Model Training Model training aims at acquiringparameters for the model to optimize the performance andeffectiveness of the path loss prediction Some machinelearning algorithms such as ANN and SVR have manyparameters whose values need to be set before the learningprocess begins In contrast Random Forest and KNN haveonly a few parameters that need to be tuned and thus they areboth efficient for implementation
For Random Forest the model accuracy is affected by theparameters including maximum tree depth and the numberof ensemble members The former controls the maximumsplit number of the decision tree and the latter determines thesize of the ensemble Generally a small ensemble with deepdecision trees has a greater tendency to overfit than a shallowensemble of many decision trees [13]
For KNN the number of neighbors 119896 is determinis-tic for the prediction performance If 119896 is too small themodel becomes complicated and may overlearn when theneighboring points are noises Meanwhile large 119896makes themodel structure simple but neighboring samples with largedifferences will affect the prediction result
These aforementioned parameters cannot be learneddirectly from the data The optimization methods for tuningparameters mainly include grid search random search andBayesian optimization In this study grid search is used tofind the optimal combination of parameters by searching allpossible points in the given range For Random Forest weevaluate the following parameters the number of ensemblemembers between 10 and 200 (at 10-unit intervals) and themaximum tree depths between 5 and 50 (at 5-unit intervals)For KNN the value of 119896 is set between 2 to 10 with the intervalof 1 The obtained parameters are as follows For RandomForest the depth of trees and the number of ensemblemembers are finally set as 30 and 140 respectively Thenumber of neighbors is equal to 5 in KNN
43 Metrics for Evaluating Prediction Accuracy To evaluatethe performance of different models two statistical proper-ties mean absolute error (MAE) and root mean square error(RMSE) [24] are chosen as metrics They can be calculatedby comparing the predicted path loss with the data in the testset as
MAE = 1119868119868sum119894=1
10038161003816100381610038161003816119875119871 119894 minus 119875119871 119894101584010038161003816100381610038161003816 (2)
RMSE = radic 1119868119868sum119894=1
(119875119871119894minus 119875119871119894
1015840)2 (3)
where 119868 is the total number of test samples 119875119871 119894 is the pathloss value of the 119894th sample in the test set and 119875119871
119894
1015840 is thepredicted value
5 Model Validation and Results
In this section we will evaluate the performance of thesemachine-learning-based models in the AA scenario Twoempirical models are also considered for comparison In
6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

4 Wireless Communications and Mobile Computing
InputTraining set119883 = x
1 x2 sdot sdot sdot x
119873 with responses 119884 = 119875119871
1 1198751198712 sdot sdot sdot 119875119871
119873 where x
119894= (119889119894 ℎ119905119894 ℎ119903119894 119868V119894 120579119894) 119894 = 1 119873
Number of ensemble members 119879Training Process
For 119905 = 1 to 119879(1) Take a bootstrap sample 119883119905 119884119905 of size119873 from 119883 119884(2) Use 119883
119905 119884119905 as the training data to train the 119905th ensemble member by using binary recursive partitioning(3) Repeat the following steps recursively for each unsplit node until the stopping criterion is met(i) Select119898 features randomly from the 119891 available features (119891 = 5 in this study)(ii) Calculate the square error for each possible splitting point of each feature and find the best binary split
among all binary splits on the119898 features(iii) Split the node into two descendant nodes using the best splitPrediction
Given a new x = (119889 ℎ119905 ℎ119903 119868V 120579) the predicted path loss value is obtained by 1198751198711015840 = (1119879)sum119879
119905=1ℎ119905(x) where ℎ
119905(x)
is the prediction of the 119905th ensemble member
Algorithm 1 Random Forest algorithm for path loss prediction in the AA scenario
different heights Each sample was with an output (path lossvalue) and five input features Removing the locations wherethe received signals are too weak to detect we obtained 5508samples in total Then these samples were separated into twoset training set and test set The former were utilized to trainthe models while the latter were employed to evaluate theperformance of the trained models
3 Machine-Learning-Based Models for AAPath Loss Prediction
Machine learning is a method to improve performance ona specific task based on extensive data and a flexible modelarchitecture In recent years it has been widely used in manyfields like computer vision speech recognition autonomousdriving and so on Machine learning tasks can be broadlyclassified into supervised learning and unsupervised learn-ing depending on whether data samples have labels or notFor supervised learning tasks can be further divided intoclassification problems and regression problems based onwhether the predicted values are discrete or continuous TheAApath loss prediction is a typical regression task which canbe solved bymany algorithms such as Random Forest ANNand SVR We aim to build the path loss prediction model inthe AA scenario based on machine learning With given pathloss values and corresponding input features the model canbe trained and then the path loss values in new conditions canbe predicted with the various inputs
In this study two typical supervised learning algorithmsRandom Forest and KNN are chosen to build predictionmodels for the AA path loss Their performance evaluationresults will be compared in Section 5 and Random Forestwill be proved to have a better agreement with the test datacompared with KNN The major principles of these twoalgorithms are introduced as follows
31 Random Forest Ensemble learning which uses multipleindividual learners to solve classification and regression prob-lems can achieve a significantly superior generalization per-formance [22] Random Forest is a commonly used ensemble
learning algorithm and employs decision tree as ensemblemember It applies bootstrap aggregating to select trainingsamples for each ensemble member Ensemble members aretrained based on these samples and then the final resultis obtained by averaging the results of all the ensemblemembers
Besides RandomForest further introduces random selec-tion of features in the decision tree training process Usuallythe traditional decision tree selects an optimal feature fromthe feature set of current node for split For Random Forest asubset is randomly chosen from the feature set of each nodeand then the optimal feature is selected from this subset
In ensemble learning the greater the diversity of ensem-ble members the better the prediction performance Byintroducing sample perturbations and feature perturbationsthe diversity of ensemble members in Random Forest isincreased It can improve the generalization performance ofthe model It is worth noting that the decision trees growwithout pruning due to the randomness of samples andfeatures Algorithm 1 shows the method we used for path lossprediction in the AA scenario The detailed descriptions ofRandom Forest can be found in [23]
Random Forest is easy to implement and can realizeparallel computing It is also insensitive to input data and canhandle thousands of input features In addition an importantadvantage of Random Forest is that it can sort the importanceof features In the following we will use this property toanalyze the significance of different input features for the AApath loss
32 KNN KNN is a classical machine learning algorithmthat is often used to solve classification problems It has noexplicit training process and its implementation is simpleThemechanism of KNN is to find the 119896 training samples closestto the sample to be predicted based on a distance metricand then to perform prediction based on the information ofthese 119896 neighbors It is also suitable for regression tasks byaveraging the values of 119896 neighbors to get the final predictionresult
Wireless Communications and Mobile Computing 5
The distance metric plays a very important role in KNNThe distance reflects the difference between two samplesCommonly used distance metrics include Manhattan dis-tance Euclidean distance and so on In this study Euclideandistance is chosen for analysis In general features havedifferent ranges of values and their influences on the distancecalculation are not the same As a result KNN algorithmis more sensitive to the input data compared with RandomForest For the sake of fairness the samples need to benormalized before model training In this study 119885-scorenormalization method is adopted and it can be expressedas
119909119873= 119909119894 minus 120583120590 (1)
where119909119894is the input value of the feature 119909
119873is the normalized
value 120583 is the mean and 120590 is the standard deviation
4 Model Training and Accuracy Metrics
The procedure of machine-learning-based path loss predic-tors for AA channel is introduced as follows Firstly wecollect enough data samples for analysis each with pathloss record and corresponding input features As mentionedabove for KNN the features need to be scaled by thenormalization process while for Random Forest it is notnecessary Secondly these samples can be divided into twocategories training set and test set which are used for modeltraining and evaluation purposes respectively Thirdly basedon the training data and selected algorithms we train themodel and tune its parameters Finally some metrics areemployed to assess the prediction accuracy of the trainedmodel and then in view of the evaluated results we canfurther improve the machine-learning-based predictor forthe path loss in the AA scenario
In this section we will introduce the division of trainingset and test set Then the model training process is explainedin detail In addition accuracy metrics for model validationare presented
41 Data Division The performance of the machine-learning-based models strongly depends on the amount andquality of training data In general more training sampleslead to more accurate reflections of the inherent laws Thuswe must try to obtain enough samples in order to getaccurate models for path loss prediction In addition therules extracted from the model training are hidden in thesamples so the training samples must be representativeDifferent from the training data the test set is used to assessand further improve the trained models
As aforementioned 5508 samples were collected in theconsidered AA scenario including samples from six routes atall different TxRx altitudes In this study the samples fromthe third route with the Rx altitudes of 20m and 30m wereused for test purpose and they did not participate in thetraining processThe remaining samples were included in thetraining set Then the proportions of the training samplesand test ones were 84 and 16
42 Model Training Model training aims at acquiringparameters for the model to optimize the performance andeffectiveness of the path loss prediction Some machinelearning algorithms such as ANN and SVR have manyparameters whose values need to be set before the learningprocess begins In contrast Random Forest and KNN haveonly a few parameters that need to be tuned and thus they areboth efficient for implementation
For Random Forest the model accuracy is affected by theparameters including maximum tree depth and the numberof ensemble members The former controls the maximumsplit number of the decision tree and the latter determines thesize of the ensemble Generally a small ensemble with deepdecision trees has a greater tendency to overfit than a shallowensemble of many decision trees [13]
For KNN the number of neighbors 119896 is determinis-tic for the prediction performance If 119896 is too small themodel becomes complicated and may overlearn when theneighboring points are noises Meanwhile large 119896makes themodel structure simple but neighboring samples with largedifferences will affect the prediction result
These aforementioned parameters cannot be learneddirectly from the data The optimization methods for tuningparameters mainly include grid search random search andBayesian optimization In this study grid search is used tofind the optimal combination of parameters by searching allpossible points in the given range For Random Forest weevaluate the following parameters the number of ensemblemembers between 10 and 200 (at 10-unit intervals) and themaximum tree depths between 5 and 50 (at 5-unit intervals)For KNN the value of 119896 is set between 2 to 10 with the intervalof 1 The obtained parameters are as follows For RandomForest the depth of trees and the number of ensemblemembers are finally set as 30 and 140 respectively Thenumber of neighbors is equal to 5 in KNN
43 Metrics for Evaluating Prediction Accuracy To evaluatethe performance of different models two statistical proper-ties mean absolute error (MAE) and root mean square error(RMSE) [24] are chosen as metrics They can be calculatedby comparing the predicted path loss with the data in the testset as
MAE = 1119868119868sum119894=1
10038161003816100381610038161003816119875119871 119894 minus 119875119871 119894101584010038161003816100381610038161003816 (2)
RMSE = radic 1119868119868sum119894=1
(119875119871119894minus 119875119871119894
1015840)2 (3)
where 119868 is the total number of test samples 119875119871 119894 is the pathloss value of the 119894th sample in the test set and 119875119871
119894
1015840 is thepredicted value
5 Model Validation and Results
In this section we will evaluate the performance of thesemachine-learning-based models in the AA scenario Twoempirical models are also considered for comparison In
6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 5
The distance metric plays a very important role in KNNThe distance reflects the difference between two samplesCommonly used distance metrics include Manhattan dis-tance Euclidean distance and so on In this study Euclideandistance is chosen for analysis In general features havedifferent ranges of values and their influences on the distancecalculation are not the same As a result KNN algorithmis more sensitive to the input data compared with RandomForest For the sake of fairness the samples need to benormalized before model training In this study 119885-scorenormalization method is adopted and it can be expressedas
119909119873= 119909119894 minus 120583120590 (1)
where119909119894is the input value of the feature 119909
119873is the normalized
value 120583 is the mean and 120590 is the standard deviation
4 Model Training and Accuracy Metrics
The procedure of machine-learning-based path loss predic-tors for AA channel is introduced as follows Firstly wecollect enough data samples for analysis each with pathloss record and corresponding input features As mentionedabove for KNN the features need to be scaled by thenormalization process while for Random Forest it is notnecessary Secondly these samples can be divided into twocategories training set and test set which are used for modeltraining and evaluation purposes respectively Thirdly basedon the training data and selected algorithms we train themodel and tune its parameters Finally some metrics areemployed to assess the prediction accuracy of the trainedmodel and then in view of the evaluated results we canfurther improve the machine-learning-based predictor forthe path loss in the AA scenario
In this section we will introduce the division of trainingset and test set Then the model training process is explainedin detail In addition accuracy metrics for model validationare presented
41 Data Division The performance of the machine-learning-based models strongly depends on the amount andquality of training data In general more training sampleslead to more accurate reflections of the inherent laws Thuswe must try to obtain enough samples in order to getaccurate models for path loss prediction In addition therules extracted from the model training are hidden in thesamples so the training samples must be representativeDifferent from the training data the test set is used to assessand further improve the trained models
As aforementioned 5508 samples were collected in theconsidered AA scenario including samples from six routes atall different TxRx altitudes In this study the samples fromthe third route with the Rx altitudes of 20m and 30m wereused for test purpose and they did not participate in thetraining processThe remaining samples were included in thetraining set Then the proportions of the training samplesand test ones were 84 and 16
42 Model Training Model training aims at acquiringparameters for the model to optimize the performance andeffectiveness of the path loss prediction Some machinelearning algorithms such as ANN and SVR have manyparameters whose values need to be set before the learningprocess begins In contrast Random Forest and KNN haveonly a few parameters that need to be tuned and thus they areboth efficient for implementation
For Random Forest the model accuracy is affected by theparameters including maximum tree depth and the numberof ensemble members The former controls the maximumsplit number of the decision tree and the latter determines thesize of the ensemble Generally a small ensemble with deepdecision trees has a greater tendency to overfit than a shallowensemble of many decision trees [13]
For KNN the number of neighbors 119896 is determinis-tic for the prediction performance If 119896 is too small themodel becomes complicated and may overlearn when theneighboring points are noises Meanwhile large 119896makes themodel structure simple but neighboring samples with largedifferences will affect the prediction result
These aforementioned parameters cannot be learneddirectly from the data The optimization methods for tuningparameters mainly include grid search random search andBayesian optimization In this study grid search is used tofind the optimal combination of parameters by searching allpossible points in the given range For Random Forest weevaluate the following parameters the number of ensemblemembers between 10 and 200 (at 10-unit intervals) and themaximum tree depths between 5 and 50 (at 5-unit intervals)For KNN the value of 119896 is set between 2 to 10 with the intervalof 1 The obtained parameters are as follows For RandomForest the depth of trees and the number of ensemblemembers are finally set as 30 and 140 respectively Thenumber of neighbors is equal to 5 in KNN
43 Metrics for Evaluating Prediction Accuracy To evaluatethe performance of different models two statistical proper-ties mean absolute error (MAE) and root mean square error(RMSE) [24] are chosen as metrics They can be calculatedby comparing the predicted path loss with the data in the testset as
MAE = 1119868119868sum119894=1
10038161003816100381610038161003816119875119871 119894 minus 119875119871 119894101584010038161003816100381610038161003816 (2)
RMSE = radic 1119868119868sum119894=1
(119875119871119894minus 119875119871119894
1015840)2 (3)
where 119868 is the total number of test samples 119875119871 119894 is the pathloss value of the 119894th sample in the test set and 119875119871
119894
1015840 is thepredicted value
5 Model Validation and Results
In this section we will evaluate the performance of thesemachine-learning-based models in the AA scenario Twoempirical models are also considered for comparison In
6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

6 Wireless Communications and Mobile Computing
Table 2 Statistics analysis for different predictors
Evaluation indicators Random Forest KNN SUI COST231-W-IMAE (dB) 227 456 754 2667RMSE (dB) 306 890 1340 2853
Sample index
80806040200
90
100
110
120
130
140
100 120 140
150
160
170
Path
loss
(dB)
Ray TracingRandom ForestKNN
SUICOST231-W-I
Figure 2 Prediction performance of differentmodelswhenRxUAVmoves in the third route (ℎ
119905= 60m and ℎ
119903= 30m)
addition the impacts of different features on the path loss areanalyzed
51 Comparisons between Empirical Models and Machine-Learning-Based Models As an example we consider thesamples in the test set gathered when the Tx and Rx altitudesare 60m and 30m respectively The predicted path lossresults from different models are shown in Figure 2 Sampleindexes are corresponding to different positions of Rx UAVin the third route from up to down in Figure 1 As mentionedin Section 2 the distance between two adjacent Rx positionsis 2m As shown in Figure 1 LOS path exists when the RxUAVmoves in themiddle corresponding to the sample indexfrom 72 to 79 It can be found that the path loss values arequite small in this area In Figure 2 it is illustrated that themachine-learning-based models can accurately approximatethe realistic path loss values generated by the ray-tracingsoftware Two empirical models SUI model and COST231-W-I model are chosen for comparison The description ofwhether the LOS path exists is not included in the SUImodel Thus there are large gaps from the path loss resultspredicted by the SUI model to the true values under theLOS condition The COST231-W-I model can describe thepath loss variations in both LOS and NLOS conditionsApart from the path visibility this model also involves thedistance Tx altitude Rx altitude and elevation angle intothe model parameters However its predicted results aremuch larger than the true values The major reason may be
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
KNN
minus15 minus10 minus5 0 5 10 15Prediction error (dB)
0
005
01
015
02
Prob
abili
ty d
ensit
y
Random Forest
Figure 3 Prediction error distributions for the machine-learning-based models
the fact that the application scenarios of the COST231-W-I model differ from what we used during the analysis Itreflects the poor generalization performance of the empiricalmodel ie its accuracy decreases when it is applied to adifferent environment Furthermore as shown in Figure 2these empirical models neglect some details of the path lossfluctuations and it is difficult to use them for characterizingthe path loss value at a specific location
Considering all samples in the test set we can get thestatistical assessment of these different models The MAEsand RMSEs of prediction results are illustrated in Table 2 Itis shown that both Random Forest and KNN outperform theempirical modelsThesemachine-learning-based models canalso depict the fluctuations of path loss in detail
52 Comparisons between RandomForest and KNN As listedin Table 2 Random Forest provides the best fit to the testdata with 227 dB MAE and 306 dB RMSE KNN also offersacceptable results whereas its predicted values are almostunchanged under the LOS condition The reason is thatwithin theKNNmodel the path loss is predicted by averagingthe values of the nearest 119896 neighbors Due to the limitednumber of collected LOS samples a similar path loss valueis probably estimated
Figure 3 shows the distributions of prediction errors forthe two machine-learning-based models It is shown thatmost errors concentrate in the range of minus5 dB to 5 dB and
Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 7
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Tx altitude = 60 mTx altitude = 70 mTx altitude = 80 m
Figure 4 Path loss values with different Tx altitudes (ℎ119903= 10m)
Random Forest shows a higher prediction accuracy thanKNN
53 Computational Efficiency Another aspect to be evaluatedis the computational efficiency The path loss values shouldbe generated in a short time so that the spatial distributionof electromagnetic fields can be quickly updated when thepropagation environment changes The generation durationsof our machine-learning-based models are recorded Thecomputer we used to run the programs has an AMD A8-4500M processor and 4GB of memory The required timesof Random Forest and KNN predictors are 871 s and 595s respectively In contrast running the ray-tracing softwarewould take more than 10 minutes to generate all the samplesin the test setThis comparison result is preliminary but it stillreflects that the machine-learning-based model can providehigher computational efficiency to the network planning thanthe deterministic approaches
54 Analysis of Feature Importance As mentioned there aremany parameters related to the path loss in the AA scenarioand they serve as the input features in our machine-learning-based models For example the ray-tracing-based path lossvalues in the third route at different Tx altitudes are shownin Figure 4 The altitude of the Rx UAV is 10m and threedifferent Tx altitudes are taken into account including 60m70m and 80m It is shown that in the selected low-altitudeUAVAAscenario the path loss values at different Tx altitudesare very close Besides when the altitude of the Tx UAV isfixed at 70m The path loss values at different Rx altitudesare illustrated in Figure 5 According to Figures 4 and 5 thepath visibility is vital for the path loss in the considered AAscenarioThe propagation distances corresponding to sampleindexes are also shown in these two figures
d39671 m 36731 m 39104 m
0 20 40 60 80 100 120 140Sample index
80
90
100
110
120
130
140
150
Path
loss
(dB)
Rx altitude = 10 mRx altitude = 20 m
Rx altitude = 30 mRx altitude = 40 m
Figure 5 Path loss values with different Rx altitudes (ℎ119905= 70m)
Table 3 Normalized importance of different features
Feature ImportancePath visibility 07438Propagation distance 01137Elevation angle 01045Tx altitude 00317Rx altitude 00064
The following task is to investigate the significance ofdifferent input parameters Fortunately Random Forest cangive a natural ranking of the features in the model In thisstudy the mean decrease impurity method [23] is employedto analyze the importance of features As introduced aboveRandom Forest is composed of multiple decision trees Eachnode in the decision tree is a condition about a feature inorder to divide the data into two sets according to differentresponse variables For regression problems variance orleast-squares fitting is often used as impurity During thetraining process it can be calculated how much impurity ofthe tree is reduced by a feature For Random Forest it ispossible to calculate the average reduced impurity of eachfeature and to use it as the importance of the feature
Table 3 shows the normalized contribution of eachparameter used in the model based on Random ForestThe path visibility has the greatest impact followed by thepropagation distance elevation angle Tx altitude and Rxaltitude Similar to results shown in Figures 4 and 5 the flightaltitudes of UAVs have small influences on the path loss Apossible reason is that the selected scenario is a low-altitudeUAVAA scenario and the heights of buildings are close to theflight altitudes of UAVs
8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

8 Wireless Communications and Mobile Computing
6 Conclusions
In this paper we have proposed a modeling mechanismfor AA path loss based on machine learning A ray-tracingsoftware has been utilized to generate the data for an urbanAA scenario which was subsequently divided into a trainingset and a test set to be used by the models The models havebeen learned by two machine learning algorithms RandomForest and KNN The test data have been used to evaluatethe accuracy performance of these machine-learning-basedmodels and two empirical models SUI model and COST231-W-I model It has been demonstrated that machine learningprovides a flexible modeling approach based on the trainingdata for such complex environment and Random Foresthas the best prediction performance In addition we haveanalyzed the importance of five input features for the pathloss in the AA scenario Results have confirmed that the pathvisibility is the dominant factor Propagation distance andelevation angle have also shown great influences
Since the UAV AA communication is a newly emergingscenario the channel modeling and path loss prediction insuch a scenario are still in a very preliminary stage Futurework should incorporate introduction of more machine-learning-based models like ANN and SVR Different sce-narios should also be taken into account to verify thegeneralization property of these models Last but not leastmeasurement campaigns should be carried out in the AA sce-nario More measured data are expected to further improvethe performance and feasibility of the machine-learning-based path loss predictors
Data Availability
The data that support the findings of this study are availableon reasonable request from the first author Yan Zhang(zhangybiteducn) or the corresponding author Zun-wen He (hezunwenbiteducn) The data are not publiclyavailable since they are generated based on the mentionedparameters by commercial software
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
Thisworkwas supported byNationalNature Science Founda-tion of China underGrant no 61201192 and theNationalHighTechnology Research and Development Program of China(863 Program) under Grant no 2015AA01A706 It was alsosupported by Ericsson Company
References
[1] Y Zeng R Zhang and T J Lim ldquoWireless communicationswith unmanned aerial vehicles Opportunities and challengesrdquoIEEE Communications Magazine vol 54 no 5 pp 36ndash42 2016
[2] Z Xiao P Xia and X-G Xia ldquoEnabling UAV cellular withmillimeter-wave communication potentials and approachesrdquoIEEE Communications Magazine vol 54 no 5 pp 66ndash73 2016
[3] D W Matolak and R Sun ldquoAir-ground channels for UASSummary of measurements andmodels for L- and C-bandsrdquo inProceedings of the 2016 Integrated Communications Navigationand Surveillance (ICNS) pp 8B2-1ndash8B2-11 Herndon VA USAApril 2016
[4] A Al-Hourani S Kandeepan and A Jamalipour ldquoModelingair-to-ground path loss for low altitude platforms in urbanenvironmentsrdquo in Proceedings of the 2014 IEEE Global Commu-nications Conference GLOBECOM2014 pp 2898ndash2904 AustinTX USA December 2014
[5] R Amorim H Nguyen P Mogensen I Z Kovacs J Wigardand T B Soslashrensen ldquoRadio channelmodeling for UAV commu-nication over cellular networksrdquo IEEEWireless CommunicationsLetters vol 6 no 4 pp 514ndash517 2017
[6] K Wang R Zhang L Wu et al ldquoPath loss measurement andmodeling for low-altitude UAV access channelsrdquo in Proceedingsof the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall) pp 1ndash5 Toronto Canada September 2017
[7] X Cai A Gonzalez-Plaza D Alonso et al ldquoLow altitude UAVpropagation channel modellingrdquo in Proceedings of the 2017 11thEuropean Conference on Antennas and Propagation (EuCAP)pp 1443ndash1447 Paris France March 2017
[8] W Khawaja I Guvenc and D Matolak ldquoUWB channel sound-ing and modeling for UAV air-to-ground propagation chan-nelsrdquo in Proceedings of the 59th IEEE Global CommunicationsConference GLOBECOM 2016 pp 1ndash7 Washington DC USADecember 2016
[9] Z Yang L Zhou G Zhao and S Zhou ldquoChannel model in theurban environment for unmanned aerial vehicle communica-tionsrdquo Accepted by EuCAPrsquo18 2018
[10] N Goddemeier and C Wietfeld ldquoInvestigation of air-to-airchannel characteristics and a UAV specific extension to the ricemodelrdquo in Proceedings of the IEEE Globecom Workshops GCWkshps 2015 pp 1ndash5 San Diego Cal USA December 2015
[11] L Zhou Z Yang G Zhao L Xiao and S Zhou ldquoModeling air-to-air path loss for dense urban environmentsrdquo in submitted toIEEE Globecomrsquo18
[12] M Ayadi A Ben Zineb and S Tabbane ldquoA UHF path lossmodel using learning machine for heterogeneous networksrdquoInstitute of Electrical and Electronics Engineers Transactions onAntennas and Propagation vol 65 no 7 pp 3675ndash3683 2017
[13] C A Oroza Z Zhang T Watteyne and S D Glaser ldquoAmachine-learning-based connectivity model for complex ter-rain large-scale low-power wireless deploymentsrdquo IEEE Trans-actions onCognitive Communications andNetworking vol 3 no4 pp 576ndash584 2017
[14] I Popescu D Nikitopoulos P Constantinou and I NafornitaldquoANNpredictionmodels for outdoor environmentrdquo in Proceed-ings of the 2006 IEEE 17th International Symposium on PersonalIndoor and Mobile Radio Communications pp 1ndash5 HelsinkiFinland
[15] I Popescu I Nafornita and P Constantinou ldquoComparison ofneural network models for path loss predictionrdquo in Proceedingsof the IEEE International Conference on Wireless and MobileComputing Networking and Communications 2005 (WiMobrsquo2005) pp 44ndash49 Montreal Canada
[16] E Ostlin H-J Zepernick and H Suzuki ldquoMacrocell path-lossprediction using artificial neural networksrdquo IEEE Transactionson Vehicular Technology vol 59 no 6 pp 2735ndash2747 2010
[17] D Wu G Zhu and B Ai ldquoApplication of artificial neuralnetworks for path loss prediction in railway environmentsrdquo
Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Wireless Communications and Mobile Computing 9
in Proceedings of the 5th International ICST Conference onCommunications and Networking in China pp 1ndash5 BeijingChina August 2010
[18] K Lin K Hung J Lin C Wang and P Pai ldquoApplying leastsquares support vector regression with genetic algorithms forradio-wave path-loss prediction in suburban environmentrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 861ndash868 SpringerBerlin Germany 2010
[19] V Abhayawardhana I Wassell D Crosby M Sellars and MBrown ldquoComparison of empirical propagation path lossmodelsfor fixed wireless access systemsrdquo in Proceedings of the 2005IEEE 61st Vehicular Technology Conference VTCrsquo05-Spring pp73ndash77 Stockholm Sweden May-June 2005
[20] V Erceg ldquoChannel models for fixed wireless applications techreprdquo in IEEE 802 16 Broadband Wireless Access WorkingGroup 2001
[21] P Mededovic M Veletic and Z Blagojevic ldquoWireless insitesoftware verification via analysis and comparison of simulationand measurement resultsrdquo in Proceedings of the 35th Interna-tional Convention MIPRO pp 776ndash781 Opatija Croatia
[22] W Hou D Shi Y Gao and C Yao ldquoA new method forradio wave propagation prediction based on finite integralmethod and machine learningrdquo in Proceedings of the 2017 IEEE5th International Symposium on Electromagnetic Compatibility(EMC-Beijing) pp 1ndash4 Beijing China October 2017
[23] L Breiman ldquoRandom forestsrdquoMachine Learning vol 45 no 1pp 5ndash32 2001
[24] J Isabona and V M Srivastava ldquoHybrid neural networkapproach for predicting signal propagation loss in urbanmicro-cellsrdquo in Proceedings of the 2016 IEEE Region 10 HumanitarianTechnology Conference (R10-HTC) pp 1ndash5 Agra India Decem-ber 2016
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom