AIAA 2001–0064 Multi-Flexible-Body Dynamic Analysis …mpatil/conference/WES01.pdf · AIAA...
11
AIAA 2001–0064 Multi-Flexible-Body Dynamic Analysis of Horizontal-Axis Wind Turbines Mayuresh J. Patil, ∗ Donghoon Lee, † and Dewey H. Hodges ‡ Georgia Institute of Technology, Atlanta, Georgia 30332-0150 ABSTRACT A dynamic stability analysis is presented for a horizontal-axis wind turbine modeled as a multi-body system with both rigid- and flexible-body subsystems. The rigid-body subsystems are modeled as an intercon- nected set of rigid bodies using Kane’s method, which can lead to equations of motion that are more com- pact than they would be using other methods. The flexible-body subsystems are modeled using nonlinear beam finite elements, derived from a mixed variational formulation for the dynamics of moving beams. The equations for the rigid and flexible subsystems are cou- pled to obtain a unified framework that models the dynamic behavior of the complete system. Lineariza- tion of the dynamic equations about the steady-state solution yields system equations with periodic coeffi- cients that must be solved by Floquet theory to extract the dynamic characteristics. Numerical studies are presented to investigate the natural frequencies and mode shapes for a wind turbine with flexible blades. The presented results demonstrate the performance of the present methodology to aid in understanding of the dynamic characteristics of the wind turbine. INTRODUCTION Accurate modeling and analysis of wind turbines is quite useful and has the potential of increasing the eco- nomic efficiency of wind-energy generation. Firstly, it helps in understanding the dynamic response of the wind turbine to disturbances at various levels of wind loading. Such insight into the behavior helps in better design of the wind turbines not only to improve effi- ciency of energy conversion, but also to improve the life of the structure. Secondly, an accurate model will help in designing efficient controllers leading to bet- ter performance and extended working life. There are various research efforts throughout the world aimed at ∗ Post Doctoral Fellow, School of Aerospace Engineering. Member, AIAA. Presently, Assistant Professor (Research), Duke University, Durham, North Carolina. † Graduate Research Assistant, School of Aerospace Engi- neering. Student Member, AIAA. ‡ Professor, School of Aerospace Engineering. Fellow, AIAA. Copyright c 2001 by Mayuresh J. Patil, Donghoon Lee, and Dewey H. Hodges. Published by the American Institute of Aero- nautics and Astronautics, Inc. with permission. better understanding of the wind-turbine. These re- search efforts encompass various technical disciplines, including, atmospheric modeling, wind-turbine struc- tural and aerodynamic modeling, energy conversion system, power distribution technology. The present effort is directed towards better understanding of the structural dynamic characteristics of the wind tur- bines. The previous research on the structural dynamics of HAWT’s can be generally classified into three groups. The first group of studies analyzed isolated blades and were mainly conducted in 1970’s. Ormiston 1 consid- ered the basic flapping response of a wind turbine blade using elementary analytical techniques and a simple rigid, centrally hinged, spring restrained blade model. Kaza and Hammond 2 considered the flap-lag stability of wind turbine rotors in the presence of veloc- ity gradients, using a single centrally-hinged model for the blade. Kottapalli 3 included flap, lead-lag, torsion degrees of freedom along with gravity loads. The cou- pled flap-lag-torsion dynamics of an isolated wind tur- bine blade was also treated by Chopra and Dugundji 4 with an emphasis on nonlinear effects associated with moderate blade deflection. The studies on rotor/tower or rotor/yaw coupling problem form the second group. Mathematical model- ing of coupled rotor/tower dynamical system was first presented by Warmbrodt and Friedmann. 5 The cou- pled rotor/tower dynamics of wind turbine was treated by Garrad and Quarton 6 using symbolic computing. Experimental study by Olorunsola 7 indicated that the torque associated with rotor stall is an important fac- tor in the yaw motion of HAWT. A concentrated study on the yaw motion of the rotor of HAWT’s was done by Hansen 8 along with the development of the Yaw- Dyn code. Bir and Butterfield 9 studied the effect of tower flexibility on the system modes using ADAMS. The third group of studies consider the complete sys- tem dynamics of HAWT’s. Molenaarx and Dijkstra 10 presented the development of the complete system dy- namics model of a wind turbine using “superelement” modeling method used to divide the structure into a number of superelements consisting of four rigid bod- ies connected by torsional springs and dampers. A recent study of the structural modeling of HAWT’s Presented at the ASME Wind Energy Symp., Reno, January 2001
Transcript of AIAA 2001–0064 Multi-Flexible-Body Dynamic Analysis …mpatil/conference/WES01.pdf · AIAA...

AIAA 2001–0064
Multi-Flexible-Body Dynamic Analysis ofHorizontal-Axis Wind Turbines
Mayuresh J. Patil,∗ Donghoon Lee,† and Dewey H. Hodges‡
Georgia Institute of Technology, Atlanta, Georgia 30332-0150
ABSTRACTA dynamic stability analysis is presented for a
horizontal-axis wind turbine modeled as a multi-bodysystem with both rigid- and flexible-body subsystems.The rigid-body subsystems are modeled as an intercon-nected set of rigid bodies using Kane’s method, whichcan lead to equations of motion that are more com-pact than they would be using other methods. Theflexible-body subsystems are modeled using nonlinearbeam finite elements, derived from a mixed variationalformulation for the dynamics of moving beams. Theequations for the rigid and flexible subsystems are cou-pled to obtain a unified framework that models thedynamic behavior of the complete system. Lineariza-tion of the dynamic equations about the steady-statesolution yields system equations with periodic coeffi-cients that must be solved by Floquet theory to extractthe dynamic characteristics. Numerical studies arepresented to investigate the natural frequencies andmode shapes for a wind turbine with flexible blades.The presented results demonstrate the performance ofthe present methodology to aid in understanding ofthe dynamic characteristics of the wind turbine.
INTRODUCTIONAccurate modeling and analysis of wind turbines is
quite useful and has the potential of increasing the eco-nomic efficiency of wind-energy generation. Firstly, ithelps in understanding the dynamic response of thewind turbine to disturbances at various levels of windloading. Such insight into the behavior helps in betterdesign of the wind turbines not only to improve effi-ciency of energy conversion, but also to improve thelife of the structure. Secondly, an accurate model willhelp in designing efficient controllers leading to bet-ter performance and extended working life. There arevarious research efforts throughout the world aimed at
∗Post Doctoral Fellow, School of Aerospace Engineering.Member, AIAA. Presently, Assistant Professor (Research), DukeUniversity, Durham, North Carolina.†Graduate Research Assistant, School of Aerospace Engi-
neering. Student Member, AIAA.‡Professor, School of Aerospace Engineering. Fellow, AIAA.Copyright c© 2001 by Mayuresh J. Patil, Donghoon Lee, and
Dewey H. Hodges. Published by the American Institute of Aero-nautics and Astronautics, Inc. with permission.
better understanding of the wind-turbine. These re-search efforts encompass various technical disciplines,including, atmospheric modeling, wind-turbine struc-tural and aerodynamic modeling, energy conversionsystem, power distribution technology. The presenteffort is directed towards better understanding of thestructural dynamic characteristics of the wind tur-bines.
The previous research on the structural dynamics ofHAWT’s can be generally classified into three groups.The first group of studies analyzed isolated blades andwere mainly conducted in 1970’s. Ormiston1 consid-ered the basic flapping response of a wind turbineblade using elementary analytical techniques and asimple rigid, centrally hinged, spring restrained blademodel. Kaza and Hammond2 considered the flap-lagstability of wind turbine rotors in the presence of veloc-ity gradients, using a single centrally-hinged model forthe blade. Kottapalli3 included flap, lead-lag, torsiondegrees of freedom along with gravity loads. The cou-pled flap-lag-torsion dynamics of an isolated wind tur-bine blade was also treated by Chopra and Dugundji4
with an emphasis on nonlinear effects associated withmoderate blade deflection.
The studies on rotor/tower or rotor/yaw couplingproblem form the second group. Mathematical model-ing of coupled rotor/tower dynamical system was firstpresented by Warmbrodt and Friedmann.5 The cou-pled rotor/tower dynamics of wind turbine was treatedby Garrad and Quarton6 using symbolic computing.Experimental study by Olorunsola7 indicated that thetorque associated with rotor stall is an important fac-tor in the yaw motion of HAWT. A concentrated studyon the yaw motion of the rotor of HAWT’s was doneby Hansen8 along with the development of the Yaw-Dyn code. Bir and Butterfield9 studied the effect oftower flexibility on the system modes using ADAMS.
The third group of studies consider the complete sys-tem dynamics of HAWT’s. Molenaarx and Dijkstra10
presented the development of the complete system dy-namics model of a wind turbine using “superelement”modeling method used to divide the structure into anumber of superelements consisting of four rigid bod-ies connected by torsional springs and dampers. Arecent study of the structural modeling of HAWT’s
Presented at the ASME Wind Energy Symp., Reno, January 2001

presented by Bir and Stol11 considers coupling of flap-ping motion of blades, teetering motion of hub, andyawing motion of tower, based on rigid body dynamicanalysis using Symdyn, a symbolic dynamic rigid-bodydynamic analysis code similar to YawDyn. The resultof this study identifies instability may occur in the tee-tering mode of hub. This significant result indicatesthat more accurate and meaningful dynamic analy-sis of HAWT’s demands new methodology to considerboth the coupling of the subsystems including teeterdegree of freedom of hub and the flexibility of towerand blades.
The goal of the present work is to develop a tool foraeroelastic modeling of horizontal-axis wind turbinesthat, when applied to simplified analytical models, canbe used in control design. As a first step, a con-sistent structural analysis is presented which modelsthe dynamic characteristics of the wind turbine con-sisting of connected flexible bodies in a vacuum. Anaerodynamic model will be added later to construct acomplete analysis tool.
PRESENT WORKThis paper presents the dynamic stability analy-
sis of a horizontal-axis wind turbine (HAWT) withthe methodology which was previously proposed byHodges and Patil.12 As an intermediate step towardfinal realization of the methodology, here we proposea simplified analytical model, solution strategy, andnumerical examples.
A dynamic stability analysis presented herein is for aHAWT. The wind turbine is modeled as a multi-bodysystem with both rigid and flexible subsystems. Therigid subsystem is modeled as a set of interconnectedrigid bodies. In the present example, the rigid-bodyportion consist of a nacelle and hub. The nacelle hasa yaw degree of freedom with respect to the towerand hub has a teetering degree of freedom with re-spect to the shaft. The complexity associated withthe rigid-body part of the system is minimized usingKane’s methodKaneLevinson1985. This is known tolead to simpler equations of motion than conventionalmethods when an intelligent choice is made for motionvariables (called generalized speeds).
The flexible portions, blades and tower, are rep-resented by geometrically-exact, mixed, beam finiteelements derived from formulation of Ref. 14. Themixed formulation leads to compact equations of mo-tion for the nonlinear structural behavior of the blades.The blade equations are coupled to the rigid-bodyequations via the connection points, i.e., the bound-ary conditions. By coupling these equations, the twomethodologies are unified into one framework thatmodels the dynamic behavior of the complete windturbine.
The set of differential equations obtained from theabove procedure can be put into a more suitable form
by separating the solution into two parts: steady-stateperiodic and transient. For this one must assume aconstant angular speed of the rotor. The restrictionof constant angular speed is necessary for the calcula-tion of a steady-state solution and the ensuing Floquetanalysis of the transient behavior. A variable-speedanalysis can be conducted once an aerodynamic mod-ule is added to the model. Presently, assuming con-stant speed, the steady-state solution will in general beperiodic in time and governed by nonlinear equations.The steady-state solution can be calculated either byusing harmonic balance or finite-elements in time.15
Linearization about the equilibrium solution yields aset of dynamic equations for the perturbed variables.Floquet theory is then used to calculate the modes ofthe system. To reduce the computational cost, herewe apply the Fast Floquet approach described by Pe-ters.16
The previously described model and solution pro-cedure are implemented into a single computer codewith the feasibility for the arbitrary number of finiteelements for the flexible blade modeling. The finite-element methodology allows for modeling of arbitraryblades and towers. Thus, the rotor blades and towercan be tapered with varying cross-sectional properties(stiffnessess, mass, etc.). Also, the methodology is gen-eral enough to accomodate rotors with three or moreblades, but the focus currently is on a two-bladed ro-tor, and thus a two-bladed case will be presented. Therigid-body subsystems are modeled using AutolevTM,a symbol manipulator. The flexible portions of themodel (blades and tower) are modeled using the Sym-bolic Toolbox of MATLAB. The primary goal of thepresent paper is to demonstrate the performance ofthe present framework for modal characterization andstability analysis of a complete wind-turbine system.
THEORETICAL BASIS
Treatment of Flexible Subsystem
All flexible elements are represented as beams usingmixed finite elements. The theoretical details werepresented earlier in Ref. 12. Here we recapitulate theimportant steps in the derivation of the equations forthe sake of completeness.
We start with the weakest variational formulationgiven in Eq. (74) of [14]. The weak form is integratedby parts in time and the time integration is removedfrom the form as given in [14]. This way only the spa-tial dependence is accounted for in the finite element
2

modeling. The weak form then reduces to∫
0
[δq′T − δqT κ− δψT (e1 + γ)
]F − δqTmgB
+ δqTP +
(δqTΩ + δψ
TV
)P +
(δψ′T − δψT κ
)M
+ δψT
(H + ΩH
)+ δF
T[e1 − CT (e1 + γ)
]− δF ′Tu− δMT
(∆ +
1
2θ +
1
4θθT
)κ− δM ′T θ
− δPT[v + ω (x1e1 + u)− CTV + u
]− δHT
[(∆ +
1
2θ +
1
4θθT
)(Cω − Ω) + θ
]dx1
=(δqTF + δψ
TM − δFT u− δMT
θ)∣∣∣
0
(1)
where u is the column matrix of displacement mea-sures of the beam reference line in the b basis (theundeformed beam cross-sectional frame basis), θ is thecolumn matrix of Rodrigues parameters relating the Bbasis (the deformed beam cross-sectional frame basis)to the b basis so that the matrix of direction cosines Crelating the bases of B and b is given in terms of θ by
C =∆
(1− 1
4θT θ
)− θ + 1
2θθT
1 + 14θT θ
(2)
F is the column matrix of section force resultant mea-sures in the B basis,M is the column matrix of sectionmoment resultant measures in the B basis, P is thecolumn matrix of section linear momentum measuresin the B basis, H is the column matrix of section an-gular momentum measures in the B basis, γ is thecolumn matrix of force strains, κ is the column matrixof moment strains, V is the column matrix of velocitymeasures of the beam reference line in the B basis, Ωis the column matrix of cross-sectional angular veloc-ity measures in the B basis, δq is the column matrix ofvirtual displacement measures in the B basis, δψ is thecolumn matrix of virtual rotation measures in the Bbasis, δF is the column matrix of virtual force trans-formed to the b basis, δM is a column matrix of virtualmoment test functions (i.e., quantities which multi-ply the governing equations), δP is the column matrixof virtual linear momentum measures transformed tothe b basis, δH is a column matrix of virtual angularmomentum test functions, all of which are completelydefined in [14].
The momentum variables (P and H) are related lin-early to the velocity variables (V and Ω) as
PH
=
[m∆ 00 ρI
] VΩ
(3)
where m is the constant mass per unit length of thebeam element, ρ is the material density, and I is theinertia matrix of the cross-sectional area. By virtue
of Eq. (4), the quantities P and H are eliminated infavor of V and Ω, the “generalized speeds” of the beamelement. Moreover, the force variables (F and M) arerelated to strain measures (γ and κ) in accordance withthe 1-D constitutive law as
FM
= [S]
γκ
(4)
where [S] is the cross-sectional stiffness matrix.
Now the beam is discretized into finite elements.Since the formulation is in its weakest form very sim-ple shape functions can be used for the variables. Inthe present case none of the variables are differenti-ated and thus one can use constant shape functionsfor the variables. Some of the variational quantities(test functions) are spatially differentiated. These testfunctions can be assumed to be linear within the ele-ment as shown below (for the ith element)
δq = δqi (1− η) + δqi+1η
δψ = δψi (1− η) + δψi+1η
δF = δF i (1− η) + δF i+1η
δM = δM i (1− η) + δM i+1η
(5)
where η is the nondimensional length coordinatewithin the element.
By collecting terms with various test function coef-ficients one can get the set of finite element equations
3

for a blade as
δq1 : −F 1 +∆x
2
(P 1 + Ω1 P 1 − κ1F 1 −mgB
)+ F0 = 0
δqi : −F i+1 +∆x
2
(P i+1 + Ωi+1 P i+1
−κi+1F i+1 −mgB)
+ F i
+∆x
2
(P i + Ωi P i − κiF i −mgB
)= 0
δqn+1 : Fn +∆x
2
(Pn + Ωn Pn − κnFn −mgB
)= 0
δψ1 : −M1 +∆x
2
[H1 + Ω1H1 − κ1M1
−(e1 + γ1
)F 1
]+ M0 = 0
δψi : −M i+1 +∆x
2
[Hi+1 + Ωi+1Hi+1
−κi+1M i+1 −(e1 + γi+1
)F i+1
]+M i
+∆x
2
[Hi + ΩiHi − κiM i −
(e1 + γi
)F i
]= 0
δψn+1 : Mn +∆x
2
[Hn + ΩnHn − κnMn
−(e1 + γn
)Fn
]= 0
δF 1 : u1 +∆x
2
[e1 − CT1 (e1 + γ1)
]= 0
δF i : ui+1 +∆x
2
[e1 − CTi+1
(e1 + γi+1
)]− ui +
∆x
2
[e1 − CTi (e1 + γi)
]= 0
δFn+1 : −un +∆x
2
[e1 − CTn (e1 + γn)
]+ un+1 = 0
δM1 : θ1 −∆x
2
(∆ +
1
2θ1 +
1
4θ1 θ
T1
)κ1 = 0
δM i : θi+1 −∆x
2
(∆ +
1
2θi+1 +
1
4θi+1 θ
Ti+1
)κi+1
− θi −∆x
2
(∆ +
1
2θi +
1
4θi θ
Ti
)κi = 0
δMn+1 : −θn −∆x
2
(∆ +
1
2θn +
1
4θn θ
Tn
)κn
+ θn+1 = 0
δP i : ui − CTi V i + v0 + ω0
(xi2e1 + ui
)= 0
δHi : θi −(
∆ +1
2θi +
1
4θi θ
Ti
) (Ωi − Cω0
)= 0
(6)
Here, the equations corresponding to δqi and δψi arethe discretized equations of motions, equations corre-sponding to δF i and δM i are the discretized strain-displacement relations, and, equations correspondingδP i and δHi are the velocity-displacement kinemat-ical equations. It should be noted here that usingthe above equations the root forces (F0) and moments(M0) can be explicitly written in terms of the othervariables and can be easily transferred to the discreteportion of the system. On the other hand, v0 and ω0
appearing the kinematic equations are calculated by
the rigid-body analysis as discussed in the next sec-tion.
Treatment of Rigid-Body Subsystem
The multi-rigid-body portions of the wind-turbinemodel are comprised of the collection of rigid bodies.The present model consists of 3 rigid bodies and amassless frame to represent the shaft S. Body T , rep-resenting the tower, is attached rigidly to an inertialframe. Body Y , representing the nacelle, yaws withrespect to T about an axis common to both which isparallel to t1 = y1 and passes through a point fixed inboth bodies, TY . The shaft S rotates with respect toY about an axis which is parallel to y3 = s3 and passesthrough YS . The motion of the shaft S is prescribedby a constant angular velocity. Body H, representingthe hub, teeters with respect to S about an axis whichis parallel to s2 = h2 and passes through SH . Bladesare attached to H at points fixed in H.
The generalized coordinates for the discrete portionare defined in terms of the yaw angle (qy) of the bodyY with respect to body T and teeter angle (qh) of thebody H with respect to the shaft S. The generalizedspeeds can be defined in various possible ways. Herethe definition of generalized speed follows the recom-mendations of Mitiguy and Kane17 and are given by
U1 = nωY y1 = qyU2 = nωHh2 = −qh − sin(Ω0t)u1
(7)
For this simplified case it turns out that U1 is a rela-tively common definition for a generalized speed (i.e.,the time derivative of an angle). If one uses onlygeneralized speeds such as this, Kane’s method wouldprovide no advantage over other formulations, such asthose based on Lagrange’s equations. On the otherhand, U2 is the measure number for the inertial an-gular velocity of H along h2. Ref. 17 shows thatthis type of definition can provide dynamical equationswith greatly reduced complexity for the subsystems inwhich this angular velocity appears.
Using the above described choice of generalizedspeed one can generate the nonlinear, time-dependentequations of motion for the multi-rigid-body subsys-tem using Autolev. The equations of motion for the
4

present model are
0 = d cos(Ω0t)Fd20 + d sin(Ω0t)F
d10 cos(qh)
+ d sin(Ω0t)Fd30 sin(qh) + d sin(Ω0t)F
u30 sin(qh)
+ cos(Ω0t)[Mu
10 cos(qh)− Mu30 sin(qh)
]+ sin(Ω0t) (khqh + chU2) + cos(Ω0t) 〈(Ihlat
− Ihlong
)cos(qh)U2 [Ω0 cos(qh)− cos(Ω0t) sin(qh)U1]
+ Ihlong sin(qh) Ω0 sin(Ω0t) sin(qh)U1 + Ω0 sin(qh)
[U2 + sin(Ω0t)U1] + cos(Ω0t) cos(qh)U1 [U2
+ sin(Ω0t)U1]+ Ihlat cos(qh) Ω0 sin(Ω0t) cos(qh)U1
+ Ω0 cos(qh) [U2 + sin(Ω0t)U1]− cos(Ω0t) sin(qh)U1
[U2 + sin(Ω0t)U1]〉+Ihlat − Iy − cos(Ω0t)
2 [Ihlat
−(Ihlat − Ihlong
)sin(qh)
2] U1 − kyqy − d cos(Ω0t)Fu20
− d sin(Ω0t)Fu10 cos(qh)− cos(Ω0t)
[Md
10 cos(qh)
+ Md30 sin(qh)
]− cos(Ω0t)F
d20 [e sin(qh)lhd1 cos(qh)]
− cos(Ω0t)Fu20 [e sin(qh)− lhd1 cos(qh)]− cyU1
(8)
0 = Mu20 + eF d30 + khqh + lhd1 F
d10 + chU2 − Md
20
− eFu30 − lhd1 Fu10 −
(Ihlat − Ihlong
)[Ω0 sin(qh)
+ cos(Ω0t) cos(qh)U1] [Ω0 cos(qh)
− cos(Ω0t) sin(qh)U1]− Ihlat U2
(9)
where Ω0 is the nominal shaft angular speed, d isthe distance from yaw axis to teeter axis, e is thedistance from shaft axis to blade root, lhd1 is thedistance from teeter axis to blade root, Ihlat is the mo-ment of inertia of hub about lateral axis, and Ihlong
is the moment of inertia of hub about longitudinalaxis. Fu10
, Fu20, Fu30
denote the forces on the hub trans-ferred from the blade U at the point of attachment(root), Mu
10, Mu
20, Mu
30denote the corresponding mo-
ments, and F d10, F d20
, F d30, Md
10, Md
20, Md
30are the forces
and moments transferred by the blade D. It should benoted that the equations of motion generated by Au-tolev are dependent on the forces and moments appliedto the hub by the blades. These forces are calculatedby the flexible blade analysis. The expression for thevelocity (v0) and angular velocity (ω0) required by theflexible blade analysis is derived by Autolev. For thepresent example we have for the blade U .
ωu0 = [Ω0 sin(qh) + cos(Ω0t) cos(qh)U1]u1 + U2u2
+ [Ω0 cos(qh)− cos(Ω0t) sin(qh)U1]u3
(10)
and
vu0 = [−lhd1U2 − d sin(Ω0t) cos(qh)U1]u1
+ lhd1 [Ω0 sin(qh) + cos(Ω0t) cos(qh)U1]+ e [Ω0 cos(qh)− cos(Ω0t) sin(qh)U1]− d cos(Ω0t)U1u2
+ [d sin(Ω0t) sin(qh)U1 − eU2]u3
(11)
Solution Methodology
Coupling of Subsystems The two systems are cou-pled by transferring the information at the interface.In the mixed finite element model for the blades, theblade root is clamped to H at points HUO and HDO ,and thus the blade root displacement u0 and orienta-tion variables θ0 are set equal to zero. The inertialvelocity of HO and angular velocity of H define themotion of the frame to which the blades are clampedand thus determine the variables v0 and ω0 needed inthe mixed finite element formulation. One can solvefor the blade root nodal force F0 and moment M0 interms of the element internal variables. This set offorces is applied at the points where the blades are at-tached to the hub, and the moment is applied to H.Similarly, for the tower, the root displacement and ro-tations are set to zero and the tip displacements androtations are specified by the rigid-body. Again, thetower tip forces are transferred to the rigid-body sub-system. By accomplishing the above transfer the twosystems are coupled and one gets the equations of mo-tion for the complete HAWT.
In practice, the equations of motion for bladesand tower are obtained from the previously describedweakest formulation after finite element discretizationof the blades. This process is carried out using MAT-LAB. The equations of motion for multi-rigid-bodysubsystem are obtained using Autolev. The rigid-bodyequations are transferred to MATLAB and are inte-grated with the flexible equations.
Steady-State Solution For simple cases the steady-state solution is obvious. For example, for a HAWTwith no precone and without considering the effectsof gravity, the steady state is zero for all variables ex-cept the extensional force which is easily calculated bysolving the steady equation for the force. For a gen-eral case the steady state is not only periodic in timebut also must be determined from nonlinear equations.The calculation of steady state is thus quite compli-cated. There are various methods used to do suchanalysis, viz., harmonic balance, periodic shooting, fi-nite elements in time (over entire period), etc.
Linear Model The set of equations of motion de-rived by MATLAB can be used with a time-integrationscheme to solve initial-value problems. One can thusunderstand the nonlinear dynamic behavior of the sys-tem by simulating the system with various initial con-ditions.
If the primary interest is in the modal character-istics then one needs to linearize the system aboutthe nonlinear, periodic, steady-state calculated usingharmonic balance or any other method. Lineariza-tion is accomplished using symbolic manipulation inMATLAB. Thus one gets a set of first-order ordinarydifferential equations with periodic coefficients.
Floquet Theory Due to the periodic components inthe system matrix, Floquet theory is necessary to in-
5

vestigate the modal characteristics of the system. Herethe Fast Floquet method is used as it saves computertime. In the usual implementation of Floquet theory,the linearized periodic system equations are integratedover one period using a set of independent initial con-ditions equal to the number of states of the system.The state variables at the end of one period help definethe Floquet transition matrix. Here a time marchingscheme based on finite elements in time, i.e., a tem-poral discretization of the above weak form, is used.For the present problem, this is equivalent to using acentral differencing scheme. The number of time stepsis is increased till convergence of natural frequenciesis achieved. The transition matrix provides the modalfrequencies and damping.
The frequencies are indeterminate by an integertimes the rotor angular speed. This indeterminacycan by removed by conducting Fourier analysis on theperiodic eigenvector of the system to determine thedominant frequency of the system. To calculate theperiodic eigenvector, the system is simulated over a pe-riod by using each eigenvector of the Floquet transitionmatrix as an initial condition. The periodic eigenvec-tor is then derived by representing the time historyas a product of the periodic eigenvector and the ex-ponential of the eigenvalue. Now, there are numerousways of representing this eigenvalue and correspond-ing periodic eigenvector pair (due to the eigenvalueuncertainty). It is prudent to tranfer the dominantfrequency/periodicity to the eigenvalue and keep theeigenvector as close to constant as possible (with somevariation due to the possibilities of other frequenies).The dominant frequency of the mode is thus calcu-lated by finding the dominant frequency of the periodiceigenvector (based on an assumed eigenvalue) and thentransferring this periodicity from the eigenvector tothe eigenvalue. This way one represents the modewith a eigenvalue which correponds to the dominantfrequency and an eigenvector denoting the dominantmodeshape and presence of other frequencies.
RESULTSThe methodology described in the earlier section is
applied to a HAWT model. The rigid-body degrees offreedom of the model are yaw and teeter. The bladesare considered to be flexible in flap bending, lead-lagbending, and torsion. The geometric and structuralproperties of the model are given in Table 1. The re-sults are presented in Table 2 for 2-, 3- and 4-elementcases. The degrees of freedom and the time requiredfor computation increase with an increase in the num-ber of elements, and so does the accuracy. The totaldegrees of freedom for the system are 6N + 2, for Nblades.
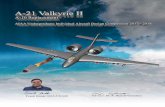
For the present example the first 2 modes in flap-ping, torsion as well as lead-lag bending are convergedby using 4 elements per blade. The results use 1000
Fig. 1 1st symmetric flapping mode (2.43 p)
time steps for Floquet theory. The error due to tempo-ral discretization is less than 0.1 %. It should be notedthat the frequencies given in Table 2 are the dominantfrequencies. There are other frequencies present, butfor the present example the magnitude of response atthe other frequencies is quite small. Figs. 1 – 4 showthe first 4 flapping dominated modes. The symmetricmodes do not interact with any other degrees of free-dom. This is expected since the forces and momentstransferred to the rigid-body (teeter) by the 2 bladesare equal and opposite. Since there is no resultantforce or moment due to the blade motion, this mo-tion does not affect other modes. The anti-symmetricmodes on the other hand have a strong coupling withthe teeter degree of freedom as can be seen in the il-lustrations. The anti-symmetric modes also have avary small contribution from yaw, lead-lag and tor-sion, which is not shown in the figure.
Figs. 5 – 8 show the first 4 torsion dominated modes.Due to the difficulty in illustrating the torsion mode,the deformation of a straight line on a circular rod un-dergoing the same twist as the present eigenvector isshown. Here again the symmetric modes do not inter-act with other degrees of freedom. The definition ofsymmetric/anti-symmetric mode needs to be clarifiedfor torsion (and lead-lag). For flapping, the symmet-ric mode was quite simply the mode in which boththe blades deform in the same manner, i.e., out of theplane of rotation in the same direction. On the otherhand, for the torsion (and lead-lag) the deformationsare in the plane of rotation. Here, the symmetric mode
6

Fig. 2 2nd symmetric flapping mode (15.55 p)
Fig. 3 1st anti-symmetric flapping mode (7.32 p)
Fig. 4 2nd anti-symmetric flapping mode (28.35 p)
Fig. 5 1st symmetric torsion mode (2.2896 p)
7

Fig. 6 2nd symmetric torsion mode (6.5738 p)
Fig. 7 1st anti-symmetric torsion mode (2.2915 p)
Fig. 8 2nd anti-symmetric torsion mode (6.5742 p)
is assumed to be the one in which the twist (or lead-lag) are same in the local reference frame. Using thisdefinition, one sees that the symmetric modes do notinteract with other modes because again the forces andmoments transferred to the hub are equal and oppo-site and thus get canceled. The anti-symmetric torsionmodes couple weakly with the yaw mode as expectedfrom the transfer of yawing moment from the bladeroot via the hub.
Figs. 9 – 12 show the first four lead-lag bendingmodes. The symmetric modes are purely lead-lagbending modes. The anti-symmetric modes couplewith yaw due to the inertia force induced yawing mo-ment when both the blades move in the same direction.The yawing is seen in the illustration by the displace-ment of the hub from the center. It is interesting thatthe yawing component vibrates at a frequency that isonce per revolution greater than the lead-lag motion.This is possibly because the inertial coupling describedabove is only present when the blades are vertical.When the blades are horizontal, the anti-symmetriclead-lag mode will inertially couple with the pitch de-gree of freedom if it were present. This phenomenonneeds to be investigated.
CONCLUSIONThe paper presents a methodology for extracting
modes and frequencies of a HAWT. This is accom-plished by separating the problem into flexible- andrigid-body subsystems. The equations of motion ofthe subsystem of rigid-bodies is dependent on the
8

Fig. 9 1st symmetric lead-lag mode (4.75 p)
Fig. 10 2nd symmetric lead-lag mode (33.57 p)
Fig. 11 1st anti-symmetric lead-lag mode (4.99 p)
Fig. 12 2nd anti-symmetric lead-lag mode (34.11p)
9

boundary conditions from the tower and blades; andthe frame motion for the blades and tip deflection ofthe tower come from the rigid-bodies subsystem. Us-ing the boundary conditions, the equations of motionfor the subsystems can be coupled to get the com-plete system equations. Once the governing equationsare linearized about the steady-state solution, Floquettheory is then used to extract the characteristic expo-nents of the complete system.
The methodology described in the paper was ap-plied to a two-bladed HAWT with flexible blades.Rigid-body degrees of freedom include yaw and teeter,whereas the blades were assumed to be flexible in flapbending, lead-lag bending, and torsion. Results arepresented which give the dynamic characteristics ofthe HAWT, including dominant eigenvalues and mode-shapes. A convergence study indicates that four finiteelements for each blade are sufficient to calculate thefirst few modes of the system. Also, a time-marchingalgorithm based on finite elements in time (equiva-lent to a central differencing scheme) was found to besimple, efficient and accurate for the time-marchingrequired for application of Floquet theory.
References1Ormiston, Robert A., “Dynamic Response of Wind Tur-
bine Rotor Systems,” In Proceedings of the 31st Annual Na-tional Forum of the American Helicopter Society, Washington,D.C., May 1975.
2Kaza, K. R. V. and Hammond, C. E., “Investigation ofFlap-lag Stability of Wind Turbine Rotors in the Presence ofVelocity Gradients and Helicopters in Forward Flight,” In Pro-ceedings of the Seventeenth Structures, Structural Dynamics,and Materials Conference, King of Prussia, Pennsylvania, May5-7, 1976, pp. 421 – 431.
3Kottapalli, S. B. R., Friedmann, Peretz, and Rosen, A.,“Aeroelastic Stability and Response of Horizontal Axis WindTurbine Blades,” In Proceedings of the 2nd International Sym-posium on Wind Energy Systems, Amsterdam Netherlands, Oc-tober 1978.
4Chopra, Inderjit and Dugundji, J., “Non-Linear DynamicResponse of a Wind Turbine Blade,” Journal of Sound andVibration, Vol. 63, No. 2, 1979, pp. 265 – 286.
5Warmbrodt, W. and Friedmann, P. P., “Formulation ofthe Aeroelastic Stability and Response Problem of Coupled Ro-tor/tower Systems,” In Proceedings of the Twentieth Structures,Structural Dynamics and Materials Conference, St. Louis, Mis-souri , April 1979, pp. 39 – 52, AIAA Paper 79-0732.
6Garrad, A. D. and Quarton, D. C., “Symbolic Computingas a Tool in Wind Turbine Dynamics,” Journal of Sound andVibration, Vol. 109, No. 1, 1986, pp. 65 – 78.
7Olorunsola, O., “On the Free Yaw Behavior of HorzontalAxis Wind Turbine,” International Journal of Energy Research,Vol. 10, No. 4, 1986, pp. 343 – 355.
8Hansen, A. C., “Yaw Dynamics of Horizontal Axis WindTurbines,” Final Subcontract Report NICH Report No. TP-442-4822, NREL, 1992.
9Bir, G. S. and Butterfield, C. P., “Modal Dynamics of aNext-Generation Flexible-Rotor Soft-Tower Wind Turbine,” InProceedings of the 15th International Modal Conference, Or-lando, Florida, 1997, pp. 76 – 84.
10Molenaarx, D. and Dijkstra, S., “Modeling of StructuralDynamics of Lagerwey LW-50/750 Wind Turbine,” Wind En-gineering, Vol. 22, No. 6, 1998, pp. 253 – 264.
11Bir, G. and Stol, C., “Modal Analysis of a Teetered-RotorWind Turbine Using the Floquet Approach,” In Proceedings ofthe ASME Wind Energy Symposium, Reno, Nevada, January10-13, 2000, pp. 23 – 33.
12Hodges, D. H. and Patil, M. J., “Multi-Flexible-BodyAnalysis for Application to Wind-Turbine Control Design,” InProceedings of the 19th ASME Wind Energy Symposium, Reno,Nevada, January 10 – 13 2000, AIAA-2000-0030.
13Kane, Thomas R. and Levinson, David A., Dynamics:Theory and Applications, McGraw-Hill Book Company, NewYork, New York, 1985.
14Hodges, D. H., “A Mixed Variational Formulation Basedon Exact Intrinsic Equations for Dynamics of Moving Beams,”International Journal of Solids and Structures, Vol. 26, No. 11,1990, pp. 1253 – 1273.
15Borri, M., “Helicopter Rotor Dynamics by Finite ElementTime Approximation,” Computers and Mathematics with Ap-plications, Vol. 12A, No. 1, January 1986, pp. 149 – 160.
16Peters, David A., “Fast Floquet Theory and Trim forMulti-Bladed Rotorcraft,” Journal of the American HelicopterSociety, Vol. 39, No. 4, October 1994, pp. 82 – 89.
17Mitiguy, Paul C. and Kane, Thomas R., “Motion VariablesLeading to Efficient Equations of Motion,” International Jour-nal of Robotics Research, Vol. 15, No. 5, October 1996, pp. 522– 532.
10

Table 1 Model data
Ω0 nominal shaft angular speed 6.02 rad/sd distance from yaw axis to teeter axis 2.388 me distance from shaft axis to blade root 1.8 m
lhd1 distance from teeter axis to blade root 0.0 mIy mom. of inertia about yaw axis without blades 16599 kg m2
Ihlat moment of inertia of hub about lateral axis 50 kg m2
Ihlong moment of inertia of hub about longitudinal axis 5 kg m2
Ky yaw stiffness 0.0Cy yaw damper coefficient 0.0Kh teeter stiffness 0.0Ch teeter damper coefficient 0.0l length of blade 8.42 mm mass per unit span of a blade 67.5772 kg/mI1 cross-sectional mom. of inertia of blade for torsion 5 kg m2/mI2 cross-sectional mom. of inertia of blade about flapping axis 0.0001 kg m2/mI3 cross-sectional mom. of inertia of blade about lead-lag axis 4.9999 kg m2/mGJ torsional rigidity of blade 21.8 ×103 N m2
EI2 bending rigidity of blade in flapping 4.36×106 N m2
EI3 bending rigidity of blade in lead-lag 21.8 ×106 N m2
Table 2 Dominant Frequencies of the HAWT
Eigenvalues in perrev2 elements 3 elements 4 elements
yaw 0 0 0teeter ± 0.045 ± 1 i ± 0.045 ± 1 i ± 0.045299 ± 1 i1st symm. flap ± 2.43 i ± 2.43 i ± 2.4347 i1st anti-symm. flap ± 8.28 i ± 7.48 i ± 7.3210 i2nd symm. flap ± 24.08 i ± 17.40 i ± 15.5465 i2nd anti-symm. flap ± 58.67 i ± 33.38 i ± 28.3486 i1st symm. torsion ± 2.32 i ± 2.30 i ± 2.2896 i1st anti-symm. torsion ± 2.33 i ± 2.30 i ± 2.2915 i2nd symm. torsion ± 7.40 i ± 6.84 i ± 6.5738 i2nd anti-symm. torsion ± 7.40 i ± 6.84 i ± 6.5742 i1st symm. lead-lag ± 4.81 i ± 4.77 i ± 4.7523 i1st anti-symm. lead-lag ± 5.06 i ± 5.01 i ± 4.9927 i2nd symm. lead-lag ± 52.07 i ± 37.61 i ± 33.5731 i2nd anti-symm. lead-lag ± 51.94 i ± 38.21 i ± 34.1087 i
11









![, Allen, C., & Rendall, T. (2019). Efficient Aero-Structural Wing AIAA Scitech … · In AIAA Scitech 2019 Forum [AIAA 2019-1701] (AIAA Scitech 2019 Forum). American Institute of](https://static.fdocuments.in/doc/165x107/6089b44b26d0b4646a6cbe59/-allen-c-rendall-t-2019-efficient-aero-structural-wing-aiaa-scitech.jpg)