AFS60A/ 2 1 AFM60A Modbus - SICK USA | SICK
31
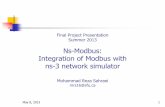
Resolution AFS60: 16,384 spr AFM60: 14 x 2 Bit Absolute encoder Pin Assignment PIN Signal Explanation 1 Common GND connection (RS485 interface signals) 2 Us Supply Voltage (+10 VDC … +30 VDC) 3 GND GND connection (supply voltage) 4 D0 RS485 interface signal (MODBUS A/A’) 5 D1 RS485 interface signal (MODBUS B/B’) 2 3 5 4 1 M12 5-pin male connector AFS1 and AFM1-MODBUS M12 5-pin male and female connector AFS2 and AFM2-MODBUS Order information Model name Part no. • AFS60A-S4ZC000S04 (2 connectors) 1067012 • AFM60A-S4ZC000S05 (1 connector) 1067013 • AFM60A-S4ZC000S06 (2 connectors) 1068009 • AFS60A-S4ZC000S03 (1 connector) 1068008 Dimensional Drawing 120° Ø 48 ± 0.1 Ø 0.1 Ø 18 19 31 10 21.5 ± 0.5 18 40.5 0.03 Ø 0.05 0.1 49.5 ± 1 M4 (3x) 6-deep Ø 60 60 44 48.6 14.5 Ø 36 f8( ) -0.025 -0.064 Ø 10 f7( ) -0.013 -0.028 A B A C A C B 1 axial shaft seal connector M12 (male) a-coded 74.2 ± 0.5 membrane 3.5 ± 0.5 2.5 Ø 18.5 14.5 Absolute encoder AFS60A/ AFM60A Modbus Properties Interface: Modbus RTU Number of steps per revolution: 16,384 Number of revolutions Singleturn-Encoder AFS60: 1 Number of revolutions Multiturn-Encoder AFM60: 4 T ECHNICAL I NFORMATION
Transcript of AFS60A/ 2 1 AFM60A Modbus - SICK USA | SICK

Resolution
AFS60: 16,384 spr AFM60: 14 x 2 Bit
Absolute encoder
Pin Assignment
PIN Signal Explanation
1 Common GND connection (RS485 interface signals)
2 Us Supply Voltage (+10 VDC … +30 VDC) 3 GND GND connection (supply voltage) 4 D0 RS485 interface signal (MODBUS A/A’) 5 D1 RS485 interface signal (MODBUS B/B’)
2
3
5
4
1
M12 5-pin male connector AFS1 and AFM1-MODBUS
M12 5-pin male and female connector AFS2 and AFM2-MODBUS
Order information
Model name Part no.
• AFS60A-S4ZC000S04 (2 connectors) 1067012
• AFM60A-S4ZC000S05 (1 connector) 1067013
• AFM60A-S4ZC000S06 (2 connectors) 1068009 • AFS60A-S4ZC000S03 (1 connector) 1068008
Dimensional Drawing
120°
Ø 48 ± 0.1
Ø 0.1
Ø 18
19
31
10
21.5 ± 0.5
18
40.5
0.03
Ø 0.05
0.1
49.5 ± 1
M4
(3x)
6-de
ep
Ø 60
60
44
48.6
14.5
Ø 36
f8(
)
-0.0
25-0
.064
Ø 10
f7(
)
-0.0
13-0
.028
A
B
A
C
A
C
B
1
axial shaft seal
connector M12 (male)a-coded
74.2
± 0
.5
membrane
3.5 ± 0.5
2.5Ø 18.5
14.5
A b s o l u t e e n c o d e r
AFS60A/ AFM60A Modbus
Properties
Interface: Modbus RTU Number of steps per
revolution: 16,384 Number of revolutions
Singleturn-Encoder AFS60: 1 Number of revolutions
Multiturn-Encoder AFM60: 4
TE
CH
NI
CA
L I
NF
OR
MA
TI
ON

Dimensional Drawing
120°
Ø 48 ± 0.1Ø 0.1
Ø 18
19
31
10
25 ± 0.5
3.6
18
Ø 10
h8 (-
0.02
2)
40.5
0.03
Ø 0.05
0.149.5 ± 1
M4
(3x)
6-de
ep
Ø 60
60
44
48.6
29
A
B
A
C
A
C
B
1
connector M12 (female)a-coded connector M12 (male)
a-coded
Ø 36
f8 (
)
-0.0
25
-0.0
64
Ø 10
f7 (
)
-0.0
13
-0.0
28

Technical Information
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 3 Subject to change without notice
Technical Data
Performance
Number of steps per revolution 16,384
Number of revolutions AFS60 1
Number of revolutions AFM60 4
Error limits ± 0.03 °
Repeatability 0.002 °
Measuring step 0.022 °
Interfaces
Bus interface Modbus RTU
Transmission rate (Baud) 9600, 19200, 38400, 57600, 115200 (Default)
Initialization time 500 ms
Transmission medium Modbus RTU RS485
Mechanical data
Mechanical interface Solid shaft with flat, face mount flange
Shaft diameter 10 mm
Mass 0.266 kg
Start up torque 5.5 Ncm (20 °C)
Operating torque 5.5 Ncm (20 °C)
Permissible Load capacity of shaft 40 N (axial), 80 N (radial)
Maximum operating speed 500 /min
Moment of inertia of the rotor 6.2 gcm²
Bearing lifetime 3.0 x 109 revolutions
Electrical data
Power consumption 0.7 W (without load)
Operating voltage range 10 V DC ... 30 V DC The voltage supply has to be applied within 200 ms after power on.
MTTFd: mean time to dangerous failure 338.6 a This product is an standard product and does not constitute a safety component as defined in the Machinery Directive. Calculation based on nominal load of components, average ambient temperatrue 40 °C, frequency of use 8760 h/a. All electronic failures are considered hazardous. For more information, see document no. 8015532. Connection type Connector M12, 5-pin, radial (one or two connectors)
Code sequence CW/CCW, parameter adjustable
Reverse polarity protection YES
Ambient data
EMC (according to EN 61000-6-2 and EN 61000-6-3)
Shaft: IP65 (according to IEC 60529) Enclosure rating
Housing: IP65 (according to IEC 60529)
Permissible relative humidity 90 % (condensation of the optical scanning not permitted)
Working temperature range -20 °C ... 80 °C
Storage temperature range -20 °C ... 80 °C, without package
Resistance to shocks 60 g, 6 ms (according to EN 60068-2-27)
Resistance to vibration 20 g, 10 Hz ... 2,000 Hz (according to EN 60068-2-6)
Technical Data

Technical Information
AFS60/AFM60 Modbus
4 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
Installation Instructions
SICK encoders are measuring instruments produced in accordance with recognized industrial regulations. The installation of the encoder is to be carried out by trained personal with knowledge of electrical engineering and
precision engineering.
The encoder must be used only for the purpose appropriate to its design.
a Safety notes
Observe the professional safety and accident prevention regulations applicable to your country.
Switch of the voltage to all the devices/machines and plant involved in the mounting.
Never electrically connect or disconnect the encoder with the voltage switched on, otherwise this may lead to damage to the encoder.
Avoid striking the shaft of the encoder.
For the satisfactory operation of the devices, care must be paid to good earthing and to a screen connection suitable for EMC (screen connected at both ends).
Generally applicable notes The more accurately the centering for the encoder is, the lower are the angular offset and shaft offset after the installation and the smaller is the stress applied to the bearing of the encoder. In order to ensure the signal quality and to protect against external interference signals, a shielded pair-twisted cable should be used. All signal lines/interface signals must be twisted in pairs with the respective complementary signal. Please consult the relevant table contained in this document for information about the PIN and wire allocation. From the point of view of EMC, it is absolutely necessary for the housing or cable screen to be connected to earth or ground. This can be done by connecting the screening braid of the cable. We recommend the use of SICK accessory cables, or cables of an equivalent quality. Information relating to SICK accessory cables can be found in the corresponding data sheets. The screening braid should be connected over a large area.
Installation Instructions

Technical Information
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 5 Subject to change without notice
Installation Instructions
Installation face mount flange via threaded holes on the flange side
�
�
�
1. Lock the drive shaft on the application side.
2. Mount the coupling (1) on the encoder, take care that it does not touch the encoder flange.
3. Push the encoder, with mounted coupling (1) onto the drive shaft and centering recess (2).
4. Fix the encoder with 3 M4 screws (3) and x the coupling (1) to the drive shaft. The coupling must not be subjected to any axial stresses. Please consider the max. permitted axial misalignment of the coupling you use (see data sheet of the coupling).
5. Make the electrical connections with the voltage switched off.
6. Switch on the voltage and check the functioning of the encoder.
Installation face mount flange via mounting spigot
�
�
�
a Since the mounting spigot is also the means of centering, the clamping device must be constructed in such a way that when it is clamped firmly, no impermissible angular or shaft offset results. 1. Lock the drive shaft on the application side.
2. Mount the coupling (1). Take care that it does not touch the encoder flange.
3. Fit the encoder, with mounted coupling (1), onto the drive shaft, and the mounting spigot into the clamping device (2).
4. Clamp the encoder rmly with the screw (3).
5. Fix the coupling (1) on the drive shaft. The coupling must not be subjected to any axial stresses. Please consider the max. permitted axial misalignment of the coupling you use (see data sheet of the coupling).
6. Make the electrical connections with the voltage switched off.
7. Switch on the voltage and check the functioning of the encoder

Section 1 Technical Information
AFS60/AFM60 Modbus
6 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
1 Modbus Accesspoint: Termination at encoder line ends
LT Balanced Pair
Slave 1 Slave n
Common
D0
D1
Pull Down
LT
Pull Up
5 V
Master
The bus termination is configured in the software by the using a register value. The Modbus must be terminated between D0 and D1 at both ends using 120 ohm bus termination resistors on the last device, once it has been looped through.
MODBUS Specifications

Technical Information Section 2
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 7 Subject to change without notice
MODBUS Specifications
2 Operating Modes: The MODBUS application protocol [1] defines a simple Protocol Data Unit (PDU) independent of the underlying communication layers:
The mapping of MODBUS protocol on a specific bus or network introduces some additional fields on the Protocol Data Unit.The client that indicates a MODBUS transaction builds the MODBUS PDU and then adds fields in order to build the appropriatecommunication PDU.
MODBUS PDU
MODBUS PDU
Address field Function code Data CRC (or LRC)
MODBUS SERIAL LINE PDE
Function code Data

Section 3 Technical Information
AFS60/AFM60 Modbus
8 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
3 Modbus Message RTU Framing In RTU mode, messages start with a silent interval of at least 3.5 character times.
MODBUS message
Address Function Data CRC Check EndStart≥ 3.5 char 8 bits 8 bits N x 8 bits 16 bits ≥ 3.5 char
The most easy implemention of this is as a multiple of character times at the baudrate that is being used on the network.
The first field which is then transmitted is the device address in the range of 01…0xF7 (247) (248-255 reserved by Modbus). The allowable characters transmitted for all fields are hexadecimal 0-9, A-F.
Networked devices monitor the network bus continuously, including during the ‘silent’ intervals. After receiving the first field (the address field), the encoder decodes it to check wheter it is the device being addressed.
Following the last transmitted character, a similar interval of at least 3.5 character times marks the end of the message. A new message can start after this interval.
The entire message frame must be transmitted as a continuous stream. If a silent interval of more than 1.5 character times occurs before completion of the frame, the receiving device flushes the incomplete message and assumes that the next byte will be the address field of a new message.
Similarly, if a new message begins earlier than 3.5 character times following a previous message, the receiving device will consider it a continuation of the previous message. This will cause an error, as the value in the final CRC field will not be valid for the combined message.

Technical Information Section 4
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 9 Subject to change without notice
MODBUS Specifications
4 RTU Transmission Mode In RTU mode, messages start with a silent interval of at least 3.5 character times. The most easy way to implement this is as a multiple of character times at the baud rate that is being used on the network (shown as T1-T2-T3-T4 in the figure below). The first field that is transmitted is the device address.
The allowable characters transmitted for all fields are hexadecimal 0-9, A-F. Networked devices monitor the network bus continuously, including during the ‘silent’ intervals. After receiving the first field (the address field), the encoder decodes it to check whether it is the device being addressed.
Following the last transmitted character, a similar interval of at least 3,5 character times marks the end of the message. A new message can start after this interval. The entire message frame must be transmitted as a continuous stream. If a silent interval of more than 1.5 character times occurs before completion of the frame, the receiving device flushes the incomplete message and assumes that the next byte will be the address field of a new message. Similarly, if a new message begins earlier than 3.5 character times following a previous message, the receiving device will consider it a continuation of the previous message. This will cause an error, as the value in the final CRC field will not be valid for the combined messages. A typical message frame is shown below:
Start Address Function Data CRC Check End
T1-T2-T3-T4 8 Bits 8 Bits n x 8 Bits 16 Bits T1-T2-T3-T4

Section 5 Technical Information
AFS60/AFM60 Modbus
10 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
5 Modbus Node Number Node number 0 is reserved and must not be used by any node.
The resulting node numbers range from 1 to f7h hexadecimal (1…247 decimal, 248-255 reserved).
Encoder for Elevation (Singleturn) Default: 0x0A
Encoder for Azimuth (Multiturn) Default: 0x14

Technical Information Section 6
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 11 Subject to change without notice
MODBUS Specifications
6 Data Model The data model of Modbus is based on a series of tables that have distinguishing characteristics. The four primary tables are:
Primary table Object type Type of Comments
Discretes Input Single bit Read-Only This type of data can be provided by an I/0 system.
Coils Single bit Read-Write This type of data can be alterable by an application program.
Input Registers 16-bit word Read-Only This type of data can be provided by an I/0 system.
Holding Registers* 16-bit word Read-Write This type of data can be alterable by an application program.
*The encoder only supports Holding Registers.
The distinctions between inputs and outputs, and between bit-addressable and word-addressable data items, do not imply any application behavior.

Section 7 Technical Information
AFS60/AFM60 Modbus
12 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
7 Data Addresses in Modbus Messages All data addresses in Modbus messages are referenced to zero. The first occurrence of a data item is addressed as item number zero. For example:
Holding register 40001 is addressed as register 0000 in the data address field of the message. The function code field already specifies a ‘holding register’ operation. Therefore the ‘4XXXX’ reference is implicit.
Holding register 40004 is addressed as register 0003 hex (3 decimal).

Technical Information Section 8
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 13 Subject to change without notice
MODBUS Specifications
8 Read Holding Register Mapping Reads the binary contents of holding registers (4XXXX references) in the encoder slave.
Broadcast is not supported.
Register Data Name Order Attrib Value Register Mandatory
40002 Position MSB RO Position Value Bit 17-32 16-Bit Yes
40003 Position LSB RO Position Value Bit 1–16 16-Bit Yes
40004 Actual Reverse State MSB RO Actual State CW = 2, CCW = 1 16-Bit Yes
40005 Actual Termination State
MSB RO Termination on = 2, off = 1 16-Bit Yes
40006 Reserved Internal Use MSB RO 16-Bit optional
40007 Reserved Internal Use MSB RO 16-Bit optional
40008 Reserved Internal Use MSB RO 16-Bit optional
40009 Reserved Internal Use MSB RO 16-Bit optional
40010 Reserved Internal Use LSB RO 16-Bit optional
40011 Reserved Internal Use MSB RO 16-Bit optional
40012 Reserved Internal Use MSB RO 16-Bit optional
Note: All additional HoldingRegister have momentarily a general placeholder functionality. All green tagged registers are commands supported by default.

Section 9 Technical Information
AFS60/AFM60 Modbus
14 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
9 Write Holding Register Mapping
Description
Write values into a sequence of holding registers (4XXXX references). When broadcast, the function presets the same register references in all attached encoder slaves.
Note
The function will override the Encoder memory protect state.
The programmed values will remain valid in the registers during the complete power-cycle and some functions will achieve immediately.
All orange tagged values need a power off/on cycle before they are valid and as of now the encoder works with the new register contents. The green tagged values will achieve immediately after a valid Update command (Preset, Count Direction)
The register values will remain and are stored in a nonvolatile memory, independent from being not programmed in the controllers logic.
Holding Register for Multiturn Encoder (Azimuth)
Register Data Name Order Attrib Value Defaults
40257 Baudrate MSB W Baudrate 1=9600, 2=19200, 3=38400, 4=57600, 5=115200
05
Number Data MSB W Number of Data 2=8 Bit 02
Parity MSB W Parity 1=No, 2=Even, 3=Odd 01
Stopbits MSB W Stopbits 1=1 Stop, 3=2 Stop 03
40261 Comm Update MSB W Communication Update 1=execute 0
40262 Node Address MSB W Node-ID 1…247 (1..0xF7) 0x14 (Azimuth)
40263 Node Update MSB W Node-ID Update 1=execute 0
40264 Presetvalue MSB W Preset High Word MSB 0x0000
Presetvalue LSB W Preset Low Word LSB 0x000 ..0xFFFF
40266 Preset Update MSB W Preset Update 1=execute 0
40267 Count Direct MSB W Count Direction CCW = 1, CW = 2 2
40268 Count Update MSB W Count Direction Update 1 = execute 0
40269 Termination MSB W Termination Modbus off=1, on=2 2
40270 Term Update MSB W Termination Update 1 = execute 0
40271 Reserved MSB W Reserved for internal use 16-Bit
40272 Reserved LSB W 16-Bit
40273 Reserved MSB W 16-Bit
40274 Reserved MSB W 16-Bit
40275 Reserved MSB W 16-Bit
40276 Reserved MSB W 16-Bit
40277 Reserved MSB W 16-Bit
Note: All additional HoldingRegister have momentarily a general placeholder functionality

Technical Information Section 9
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 15 Subject to change without notice
MODBUS Specifications
Holding Register for Singleturn Encoder (Elevation)
Register Data Name Order Attrib Value Defaults
40257 Baudrate MSB W Baudrate 1=9600, 2=19200, 3=38400, 4=57600, 5=115200
05
Number Data MSB W Number of Data 2=8 Bit 02
Parity MSB W Parity 1=No, 2=Even, 3=Odd 01
Stopbits MSB W Stopbits 1=1 Stop, 3=2 Stop 03
40261 Comm Update MSB W Communication Update 1=execute 0
40262 Node Address MSB W Node-ID 1…247 (1..0xF7) 0x0A (Elevation)
40263 Node Update MSB W Node-ID Update 1=execute 0
40264 Presetvalue MSB W Preset High Word MSB 0x0000
Presetvalue LSB W Preset Low Word LSB 0x0000 ..0x3FFF
40266 Preset Update MSB W Preset Update 1=execute 0
40267 Count Direct MSB W Count Direction CCW = 1, CW = 2 2
40268 Count Update MSB W Count Direction Update 1 = execute 0
40269 Termination MSB W Termination Modbus off=1, on=2 1
40270 Term Update MSB W Termination Update 1 = execute 0
40271 Reserved MSB W Reserved for internal use 16-Bit
40272 Reserved LSB W 16-Bit
40273 Reserved MSB W 16-Bit
40274 Reserved MSB W 16-Bit
40275 Reserved MSB W 16-Bit
40276 Reserved MSB W 16-Bit
40277 Reserved MSB W 16-Bit
Note: All additional HoldingRegister have momentarily a general placeholder functionality

Section 10 Technical Information
AFS60/AFM60 Modbus
16 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
10 Supported Modbus Function Codecs in Project
Function 03 Read Holding Registers General Description
Query
The query message specifies the starting register and quantity of registers to be read. Registers are addressed starting at zero: registers 1 – 16 are addressed as 0 – 15. This is an example of a request to read registers 40108 – 40110 from slave device:
Query
Field Name
Example
(Hex)
Slave Address 11
Function 03
Starting Address Hi 00
Starting Address Lo 6B
No. of Points Hi 00
No. of Points Lo 03
Error Check (LRC or CRC) ---
Response
The register data in the response message are packed as two bytes per register, with the binary contents being aligned to the right within each byte. For each register, the first byte contains the high order bits and the second contains the low order bits. The response is returned when the data is completely assembled.
This is an example of a response to the query on the opposite page:
Response
Field Name
Example
(Hex)
Slave Address 11
Function 03
Byte Count 06
Data Hi (Register 40108) 02
Data Lo (Register 40108) 2B
Date Hi (Register 40109) 00
Data Lo (Register 40109) 00
Data Hi (Register 40110) 00
Data Lo (Register 40110) 64
Error Check (LRC or CRC) ---

Technical Information Section 10
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 17 Subject to change without notice
MODBUS Specifications
Function 16 (10Hex) Preset Multiple Registers
Query
The query message specifies the register references to be preset. Registers are addressed starting at zero: register 1 is addressed as 0.
This is an example of a request to preset two registers starting at 40002 to 00 0A and 01 02 hex, in slave device 17 (0x11):
Query
Field Name
Example
(Hex)
Slave Address 11
Function 10
Starting Address Hi 00
Starting Address Lo 01
No. of Registers Hi 00
No. of Registers Lo 02
Byte Count 04
Data Hi 00
Data Lo 0A
Data Hi 01
Data Lo 02
Error Check (LRC or CRC) ---
Response
The normal response returns the slave address, function code, starting address, and quantity of registers preset.
This is an example of a response to the query shown above.
Response
Field Name
Example
(Hex)
Slave Address 11
Function 10
Starting Address Hi 00
Starting Address Lo 01
No. of Registers Hi 00
No. of Registers Lo 02
Error Check (LRC or CRC) ---

Section 11 Technical Information
AFS60/AFM60 Modbus
18 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
11 Function 03 Read Holding Registers Description
Reads the binary contents of holding registers (4X references) from the slave.
Broadcasts is not supported.
Register Data Name Order Attrib Value Register Mandatory
40002 Position MSB RO Position Value Bit 17-32 32-Bit Yes
40003 Position LSB RO Position Value Bit 1 – 16 16-Bit Yes
40004 Actual Reverse State MSB RO Actual State CW = 2, CCW = 1 16-Bit Yes
40005 Actual Termination State
MSB RO Termination on = 2, off = 1 16-Bit Yes
Position Value Query Register 40002 (32-Bit access) Two Bytes
each points
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of P
oint
s H
i
No.
of P
oint
s Lo
CR
C S
chec
k 1
6 b
its
End
Elevation (singleturn) Feedback position (HEX)
Query T1-T2 T3-T4
0A 03 00 01 00 02 CRC T1-T2 T3-T4
Azimuth (multiturn) Feedback position (HEX)
Query T1-T2 T3-T4
14 03 00 01 00 02 CRC T1-T2 T3-T4
Position Value Query Register 40003 (16-Bit access) *new Two Bytes
each points
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of P
oint
s H
i
No.
of P
oint
s Lo
CR
C S
chec
k 1
6 b
its
End
Elevation (singleturn) Feedback position (HEX)
Query T1-T2 T3-T4
0A 03 00 02 00 01 CRC T1-T2 T3-T4
Azimuth (multiturn) Feedback position (HEX)
Query T1-T2 T3-T4
14 03 00 02 00 01 CRC T1-T2 T3-T4
Response from Encoder (MT or ST) (32-Bit access) One Register
of Two bytes One Register of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Byt
e C
ount
N
o. o
f Poi
nts
x 2
Dat
a H
i
Dat
a Lo
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Elevation (singleturn) Feedback position (HEX) (from Control Box side):
Response T1-T2 T3-T4
0A 03 04 GG HH II JJ CRC T1-T2 T3-T4
GG HH II JJ: 00 00 00 00 Zero Position of encoder 00 00 3F FF Last Position of encoder
Azimuth (multiturn) Feedback position (HEX) (from Control Box side):
Response T1-T2 T3-T4
14 03 04 GG HH II JJ CRC T1-T2 T3-T4
GG HH II JJ: 00 00 00 00 Zero Position of encoder 00 00 FF FF Last Position of encoder

Technical Information Section 11
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 19 Subject to change without notice
MODBUS Specifications
Response from Encoder (MT or ST) (16-Bit access) *new One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Byt
e C
ount
N
o. o
f Poi
nts
x 2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Elevation (singleturn) Feedback position (HEX)
Response T1-T2 T3-T4
0A 03 02 II JJ CRC T1-T2 T3-T4
II JJ: 00 00 Zero Position of encoder 3F FF Last Position of encoder
Azimuth (multiturn) Feedback position (HEX)
Response T1-T2 T3-T4
14 03 02 II JJ CRC T1-T2 T3-T4
II JJ: 00 00 Zero Position of encoder FF FF Last Position of encoder
Expected Value Range
Position values depending on the adjusted scaling factor:
0..0x3FFF (0..16384) CW Elevation Singleturn resolution 14 Bit:
0x3FFF…0 CCW
0..0xFFFF (0..65536) CW Azimuth Multiturn resolution 14+2 Bit:
0xFFFF…0 CCW
Actual Reverse State Query: Two Bytes
each points
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of P
oint
s H
i
No.
of P
oint
s Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode State (Elevation)
Query T1-T2 T3-T4
0A 03 00 03 00 01 CRC T1-T2 T3-T4
Actual Reverse state
Reverse Mode State (Azimuth)
Query T1-T2 T3-T4
14 03 00 03 00 01 CRC T1-T2 T3-T4
Actual Reverse state
One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Byt
e C
ount
N
o. o
f Poi
nts
x 2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode State (Elevation)
Response T1-T2 T3-T4
0A 03 02 YY ZZ CRC T1-T2 T3-T4
Counterclockwise: YY ZZ 00 01 Clockwise: YY ZZ 00 02 (Default Value)
Reverse Mode State (Azimuth)
Response T1-T2 T3-T4
14 03 02 YY ZZ CRC T1-T2 T3-T4
Counterclockwise: YY ZZ 00 01 Clockwise: YY ZZ 00 02 (Default Value)
Expected Value in project:
Allowed Count direction values:
Counterclockwise CCW = 1
Clockwise CW = 2
Default: Clockwise CW = 2
Estimated response delay for Reverse state: 10μs + process time for response frame
Minimum cycle time for Actual reverse update: 2ms

Section 11 Technical Information
AFS60/AFM60 Modbus
20 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
Actual Bus Termination State Query: Two Bytes
each points
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of P
oint
s H
i
No.
of P
oint
s Lo
CR
C S
chec
k 1
6 b
its
End
Bus termination state (Elevation)
Query T1-T2 T3-T4
0A 03 00 04 00 01 CRC T1-T2 T3-T4
Actual Bus termination state
Bus termination state (Azimuth)
Query T1-T2 T3-T4
14 03 00 04 00 01 CRC T1-T2 T3-T4
Actual Bus termination state
One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Byt
e C
ount
N
o. o
f Poi
nts
x 2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Bus termination state (Elevation)
Response T1-T2 T3-T4
0A 03 02 YY ZZ CRC T1-T2 T3-T4
Termination: YY ZZ 00 01 Off (Default Value) Termination: YY ZZ 00 02 On
Bus termination state (Azimuth)
Response T1-T2 T3-T4
14 03 02 YY ZZ CRC T1-T2 T3-T4
Termination: YY ZZ 00 01 Off Termination: YY ZZ 00 02 On (Default Value)
Expected Value in project:
Allowed Bus Termination values:
Bus termination off = 1
Bus termination on = 2
Encoder Azimuth Default: Bus Termination on CW = 2
Encoder Elevation Default: Bus Termination off CW = 1
Estimated response delay for termination state: 10μs + process time for response frame
Minimum cycle time for Actual Termination update: 2ms

Technical Information Section 12
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 21 Subject to change without notice
MODBUS Specifications
12 Function 16 (10 HEX) write multiple registers Multiturn Encoder for azimuth
Register Data Name Order Attrib Value Defaults
40257 Baudrate MSB W Baudrate 1=9600, 2=19200, 3=38400, 4=57600, 5=115200
05
Number Data MSB W Number of Data 2=8 Bit 02
Parity MSB W Parity 1=No, 2=Even, 3=Odd 01
Stopbits MSB W Stopbits 1= 1 Stop, 3= 2 Stop 03
40261 Comm Update MSB W Communication Update 1=execute 0
40262 Node Address MSB W Node-ID 1…247 (1..0xF7) 0x14 (Azimuth)
40263 Node Update MSB W Node-ID Update 1=execute 0
40264 Presetvalue MSB W Preset High Word MSB 0x0000
Presetvalue LSB W Preset Low Word LSB 0x0000…0xFFFF
40266 Preset Update MSB W Preset Update 1=execute 0
40267 Count Direct MSB W Count Direction CCW = 1, CW = 2 2
40268 Count Update MSB W Count Direction Update 1=execute 0
40269 Termination MSB W Termination Modbus off=1, on=2 2
40270 Term Update MSB W Termination Update 1 = execute 0
Singleturn Encoder for elevation
Register Data Name Order Attrib Value Defaults
40257 Baudrate MSB W Baudrate 1=9600, 2=19200, 3=38400, 4=57600, 5=115200
05
Number Data MSB W Number of Data 2=8 Bit 02
Parity MSB W Parity 1=No, 2=Even, 3=Odd 01
Stopbits MSB W Stopbits 1= 1 Stop, 3= 2 Stop 03
40261 Comm Update MSB W Communication Update 1=execute 0
40262 Node Address MSB W Node-ID 1…247 (1..0xF7) 0x0A (Elevation)
40263 Node Update MSB W Node-ID Update 1=execute 0
40264 Presetvalue MSB W Preset High Word MSB 0x0000
Presetvalue LSB W Preset Low Word LSB 0x0000…0x3FFF
40266 Preset Update MSB W Preset Update 1=execute 0
40267 Count Direct MSB W Count Direction CCW = 1, CW = 2 2
40268 Count Update MSB W Count Direction Update 1=execute 0
40269 Termination MSB W Termination Modbus off=1, on=2 1
40270 Term Update MSB W Termination Update 1 = execute 0

Section 12 Technical Information
AFS60/AFM60 Modbus
22 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
Write communication parameters (Register 40257) Two
Bytes each register
One Register of Two bytes
One Register of Two bytes
One Register of Two bytes
One Register of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a H
i
Dat
a H
i
Dat
a Lo
Dat
a Lo
Dat
a Lo
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Communication Parameters (Elevation):
Query T1-T2 T3-T4
0A 10 01 00 00 04 08 KK LL MM NN OO PP QQ RR CRC T1-T2 T3-T4
KK LL: 1= 9600, 2=19200, 3=38400, 4=57600, 5=115200 MM NN: 2=8 data bits OO PP: 1=No Parity, 2=Even, 3=Odd QQ RR: 1=1, 3=2 (Default Value: 00 05 00 02 00 01 00 03
Communication Parameters (Azimuth):
Query T1-T2 T3-T4
14 10 01 00 00 04 08 KK LL MM NN OO PP QQ RR CRC T1-T2 T3-T4
KK LL: 1= 9600, 2=19200, 3=38400, 4= 57600, 5=115200 MM NN: 2=8 data bits OO PP: 1=No Parity, 2=Even, 3=Odd QQ RR: 1=1, 3=2 (Default Value: 00 05 00 02 00 01 00 03
All input values for communication will be checked on plausibility.
Other values as defined are not allowed and will be cause an error message
Response Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Communication Parameters (Elevation)
Response T1-T2 T3-T4
0A 10 01 00 00 04 CRC T1-T2 T3-T4
Response Configuration ok
Communication Parameters (Azimuth)
Response T1-T2 T3-T4
14 10 01 00 00 04 CRC T1-T2 T3-T4
Response Configuration ok
Default communication values for project:
Note:
After a Communication update all Communication parameters will not be valid until a complete power off/on cycle. The new value will be stored but executed only after a new power-on cycle.
Elevation Singleturn Node-ID: 115200 Baud, 8Data, No parity, 2Stop³
Azimuth Muliturn Node-ID: 115200 Baud, 8Data, No parity, 2Stop³
³Remark: the use of no parity requires 2 stop bits
Response delay after
Execute Comm Update Command: max. 15 ms needed for storage operation

Technical Information Section 12
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 23 Subject to change without notice
MODBUS Specifications
Execute Communication presets (Register 40261) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
w
CR
C S
chec
k 1
6 b
its
End
Communication update (Elevation)
Query T1-T2 T3-T4
0A 10 01 04 00 01 02 00 01 CRC T1-T2 T3-T4
Communication update with upper parameters
Communication update (Azimuth)
Query T1-T2 T3-T4
14 10 01 04 00 01 02 00 01 CRC T1-T2 T3-T4
Communication update with upper parameters
Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Communication update (Elevation)
Response T1-T2 T3-T4
0A 10 01 04 00 01 CRC T1-T2 T3-T4
Communication update with upper parameters ok
Communication update (Azimuth)
Response T1-T2 T3-T4
14 10 01 04 00 01 CRC T1-T2 T3-T4
Communication update with upper parameters ok
Write Node ID (Register 40262) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Communication slave Parameter (Elevation)
Query T1-T2 T3-T4
0A 10 01 05 00 01 02 SS TT CRC T1-T2 T3-T4
SS TT: Id Address (00 01 … 00 F7) (Default Value: 00 0A)
Communication slave Parameter (Azimuth)
Query T1-T2 T3-T4
14 10 01 05 00 01 02 SS TT CRC T1-T2 T3-T4
SS TT: Id Address (00 01 … 00 F7) (Default Value: 00 14)
Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Communication slave Parameter (Elevation)
Response T1-T2 T3-T4
0A 10 01 05 00 01 CRC T1-T2 T3-T4
Response Communication ok
Communication slave Parameter (Azimuth)
Response T1-T2 T3-T4
14 10 01 05 00 01 CRC T1-T2 T3-T4
Response Communication ok

Section 12 Technical Information
AFS60/AFM60 Modbus
24 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
Default Node-ID values for project:
Valid Node ID’s are in the range 0x01 … 0xF7 (0x00 is reserved for plc, 248 … 255 reserved)
Note:
After a Node-ID update the new Node-ID will not be valid until a complete power off/on cycle. The new Node-ID will be stored but executed only after a new power-on cycle.
Elevation Singleturn Node-ID: 0x0A
Azimuth Multiturn Node-ID: 0x14
Response delay after
Execute Node-ID Update Command: max. 15 ms needed for storage operation
Write Node-ID Update (Register 40263) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Communication slave Parameter update (Elevation)
Query T1-T2 T3-T4
0A 10 01 06 00 01 02 00 01 CRC T1-T2 T3-T4
Id address update with upper parameters
Communication slave Parameter update (Azimuth)
Query T1-T2 T3-T4
14 10 01 06 00 01 02 00 01 CRC T1-T2 T3-T4
Id address update with upper parameters
Response Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Communication slave Parameter update (Elevation)
Response T1-T2 T3-T4
0A 10 01 06 00 01 CRC T1-T2 T3-T4
Id address update with upper parameters ok
Communication slave Parameter update (Azimuth)
Response T1-T2 T3-T4
14 10 01 06 00 01 CRC T1-T2 T3-T4
Id address update with upper parameters ok
Write Position Preset value (Register 40264) Two Bytes
each register One Register
of Two bytes One Register of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
Dat
a H
i
Dat
e Lo
CR
C S
chec
k 1
6 b
its
End
Position Preset (Elevation)
Query T1-T2 T3-T4
0A 10 01 07 00 02 04 UU VV WW XX CRC T1-T2 T3-T4
Position: UU VV WW XX 00 00 00 00 … 00 00 3F FF
Position Preset (Azimuth)
Query T1-T2 T3-T4
14 10 01 07 00 02 04 UU VV WW XX CRC T1-T2 T3-T4
Position: UU VV WW XX 00 00 00 00 … 00 00 FF FF

Technical Information Section 12
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 25 Subject to change without notice
MODBUS Specifications
Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Position Preset (Elevation)
Response T1-T2 T3-T4
0A 10 01 07 00 02 CRC T1-T2 T3-T4
Response Position Preset ok
Position Preset (Azimuth)
Response T1-T2 T3-T4
14 10 01 07 00 02 CRC T1-T2 T3-T4
Response Position Preset ok
Preset values for project:
The actual position value of the encoder will be set immediately to the programmed preset value after a valid update command. This allows, for example, for the encoder’s zero position to be compared with the application zero position. After transmission of preset values a range check ist initiated.
Elevation Singleturn preset 0x0000
Azimuth Multiturn preset 0x0000
Preset Range Singleturn (elevation) 0 … 0x3FFF (14 Bit)
Preset Range Multiturn (azimuth) 0 … 0xFFFF (16 Bit)
Preset Delay time: 100μs
Verification of Position after preset: yes (internal)
Response delay after
Execute Preset Update Command: max. 15 ms needed for storage operation
Write Position Preset Update (Register 40266) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Position Preset update (Elevation)
Query T1-T2 T3-T4
0A 10 01 09 00 01 02 00 01 CRC T1-T2 T3-T4
Position Preset update
Position Preset update (Azimuth)
Query T1-T2 T3-T4
14 10 01 09 00 01 02 00 01 CRC T1-T2 T3-T4
Position Preset update
Response Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Position Preset update (Elevation)
Response T1-T2 T3-T4
0A 10 01 09 00 01 CRC T1-T2 T3-T4
Position Preset update ok
Position Preset update (Azimuth)
Response T1-T2 T3-T4
14 10 01 09 00 01 CRC T1-T2 T3-T4
Position Preset update ok

Section 12 Technical Information
AFS60/AFM60 Modbus
26 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
Write Count Direction value (Register 40267) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode (Elevation)
Query T1-T2 T3-T4
0A 10 01 0A 00 01 02 YY ZZ CRC T1-T2 T3-T4
Counterclockwise: YY ZZ 00 01 Clockwise: YY ZZ 00 02 (Default Value)
Reverse Mode (Azimuth)
Query T1-T2 T3-T4
14 10 01 0A 00 01 02 YY ZZ CRC T1-T2 T3-T4
Counterclockwise: YY ZZ 00 01 Clockwise: YY ZZ 00 02 (Default Value)
Default value for project:
Allowed Count direction values:
Counterclockwise CCW = 1
Clockwise CW = 2
Default: Clockwise CW = 2
Response delay after
Execute Revers Update Command: max. 15 ms needed for storage operation
Response Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode (Elevation)
Response T1-T2 T3-T4
0A 10 01 0A 00 01 CRC T1-T2 T3-T4
Response Reverse mode ok
Reverse Mode (Azimuth)
Response T1-T2 T3-T4
14 10 01 0A 00 01 CRC T1-T2 T3-T4
Response Reverse mode ok

Technical Information Section 12
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 27 Subject to change without notice
MODBUS Specifications
Write Count Direction Update (Register 40268) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode update (Elevation)
Query T1-T2 T3-T4
0A 10 01 0B 00 01 02 00 01 CRC T1-T2 T3-T4
Reverse mode update
Reverse Mode update (Azimuth)
Query T1-T2 T3-T4
14 10 01 0B 00 01 02 00 01 CRC T1-T2 T3-T4
Reverse mode update
Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Reverse Mode update (Elevation)
Response T1-T2 T3-T4
0A 10 01 0B 00 01 CRC T1-T2 T3-T4
Reverse mode update ok
Reverse Mode update (Azimuth)
Response T1-T2 T3-T4
14 10 01 0B 00 01 CRC T1-T2 T3-T4
Reverse mode update ok
Write Termination Modbus (Register 40269) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Bus Termination (Elevation)
Query T1-T2 T3-T4
0A 10 01 0C 00 01 02 YY ZZ CRC T1-T2 T3-T4
Termination YY ZZ 00 01 off (Default Value) Termination YY ZZ 00 02 on
Bus Termination (Azimuth)
Query T1-T2 T3-T4
14 10 01 0C 00 01 02 YY ZZ CRC T1-T2 T3-T4
Termination YY ZZ 00 01 off Termination YY ZZ 00 02 on (Default Value)
Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Bus Termination (Elevation)
Response T1-T2 T3-T4
0A 10 01 0C 00 01 CRC T1-T2 T3-T4
Bus Termination Response ok
Bus Termination (Azimuth)
Response T1-T2 T3-T4
14 10 01 0C 00 01 CRC T1-T2 T3-T4
Bus Termination Response ok
Default value for project:
The bus termination is software configured by means of the register 40269 value. Once the Modbus has been looped through, it must be terminated between D0 and D1 at the last encoder end. Allowed values: Termination off = 1, Termination on = 2
Default Multiturn (azimuth) Termination on = 2 (on)
Default Singleturn (elevation) Termination on = 1 (off)
Response delay after
Execute Termination Update Command: max. 15 ms needed for storage operation
Note: After a bus termination update the new bus termination will not be valid before a complete power off/on cycle.

Section 12 Technical Information
AFS60/AFM60 Modbus
28 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
Write Termination Modbus Update (Register 40270) Two Bytes
each register One Register
of Two bytes
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
Byt
e C
ount
N
o. o
f reg
iste
rs x
2
Dat
a H
i
Dat
a Lo
CR
C S
chec
k 1
6 b
its
End
Bus Termination update (Elevation)
Query T1-T2 T3-T4
0A 10 01 0D 00 01 02 00 01 CRC T1-T2 T3-T4
Bus Termination update
Bus Termination update (Azimuth)
Query T1-T2 T3-T4
14 10 01 0D 00 01 02 00 01 CRC T1-T2 T3-T4
Bus Termination update
Response Two Bytes
each register
Sta
rt
Sla
ve A
ddre
ss
(1 B
yte)
Func
tion
(1 B
yte)
Sta
rtin
g ad
dres
s H
i
Sta
rtin
g ad
dres
s Lo
No.
of r
egis
ters
Hi
No.
of r
egis
ters
Lo
CR
C S
chec
k 1
6 b
its
End
Bus Termination update (Elevation)
Response T1-T2 T3-T4
0A 10 01 0D 00 01 CRC T1-T2 T3-T4
Bus Termination update ok
Bus Termination update (Azimuth)
Response T1-T2 T3-T4
14 10 01 0D 00 01 CRC T1-T2 T3-T4
Bus Termination update ok

Technical Information Section 13
AFS60/AFM60 Modbus
E113964/2014-04-01 © SICK STEGMANN GmbH • Germany • All rigths reserved 29 Subject to change without notice
MODBUS Specifications
13 Unsupported Modbus Function Codes
The following function codes are not part of the implementation:
01 Read Coil Status
02 Read Input Status
04 Read Input Registers
05 Force Single Coil
06 Preset Single Register
07 Read Exception Status
11 (0B Hex) Fetch Comm Event Ctr
12 (0C Hex) Fetch Comm Event Log
15 (0F Hex) Force Multiple Coils
17 (11 Hex) Report Slave ID (use for diagnostic only)
20 (14 Hex) Read General Reference
21 (15 Hex) Write General Reference
22 (16 Hex) Mask Write 4X Register
23 (17 Hex) Read/Write 4X Register
24 (18 Hex) Read FIFO Queue

Section 14 Technical Information
AFS60/AFM60 Modbus
30 © SICK STEGMANN GmbH • Germany • All rigths reserved E113964/2014-04-01 Subject to change without notice
MODBUS Specifications
14 Modbus Exception Codes Code Name Meaning
01 ILLEGAL FUNCTION
The function code received in the query is not an allowed action for the slave. If a Poll Program Complete command was issued, this code indicates that no program function preceded it.
02 ILLEGAL DATA ADDRESS
The data address received in the query is not an allowed value for the slave.
03 ILLEGAL DATA VALUE
A value contained in the query data field ist not an allowed value for the slave.
04 SLAVE DEVICE FAILURE
An unrecoverable error occurred while the slave was attempting to perform the requested action.
05 ACKNOWLEDGE
Not supported.
06 SLAVE DEVICE BUSY
Not supported.

SICK AG | Waldkirch | Germany | www.sick.com
8017414/2014
-04-01
∙ cv
(2014-04
) ∙ A
4 4c
int4
2 AustraliaPhone +61 3 9457 0600 1800 334 802 – tollfreeE-Mail [email protected]
Belgium/LuxembourgPhone +32 (0)2 466 55 66E-Mail [email protected]
BrasilPhone +55 11 3215-4900E-Mail [email protected]
CanadaPhone +1 905 771 14 44E-Mail [email protected]
Česká republikaPhone +420 2 57 91 18 50E-Mail [email protected]
ChinaPhone +86 4000 121 000E-Mail [email protected] +852-2153 6300E-Mail [email protected]
DanmarkPhone +45 45 82 64 00E-Mail [email protected]
DeutschlandPhone +49 211 5301-301E-Mail [email protected]
EspañaPhone +34 93 480 31 00E-Mail [email protected]
FrancePhone +33 1 64 62 35 00E-Mail [email protected]
Great BritainPhone +44 (0)1727 831121E-Mail [email protected]
IndiaPhone +91–22–4033 8333E-Mail [email protected]
IsraelPhone +972-4-6881000E-Mail [email protected]
ItaliaPhone +39 02 27 43 41E-Mail [email protected]
JapanPhone +81 (0)3 3358 1341E-Mail [email protected]
MagyarországPhone +36 1 371 2680E-Mail [email protected]
NederlandPhone +31 (0)30 229 25 44E-Mail [email protected]
Norge Phone +47 67 81 50 00E-Mail [email protected]
ÖsterreichPhone +43 (0)22 36 62 28 8-0E-Mail [email protected]
PolskaPhone +48 22 837 40 50E-Mail [email protected]
RomâniaPhone +40 356 171 120 E-Mail [email protected]
RussiaPhone +7-495-775-05-30E-Mail [email protected]
SchweizPhone +41 41 619 29 39E-Mail [email protected]
SingaporePhone +65 6744 3732E-Mail [email protected]
SlovenijaPhone +386 (0)1-47 69 990E-Mail [email protected]
South AfricaPhone +27 11 472 3733E-Mail [email protected]
South KoreaPhone +82 2 786 6321/4E-Mail [email protected]
SuomiPhone +358-9-25 15 800E-Mail [email protected]
SverigePhone +46 10 110 10 00E-Mail [email protected]
TaiwanPhone +886 2 2375-6288E-Mail [email protected]
TürkiyePhone +90 (216) 528 50 00E-Mail [email protected]
United Arab EmiratesPhone +971 (0) 4 88 65 878E-Mail [email protected]
USA/MéxicoPhone +1(952) 941-6780 1 (800) 325-7425 – tollfreeE-Mail [email protected]
More representatives and agencies at www.sick.com