
Advanced grid-forming control for low-inertia systems
21
Advanced grid-forming control for low-inertia systems Florian D ¨ orfler ETH Z ¨ urich Emerging Topics in Control of Power Systems
Transcript of Advanced grid-forming control for low-inertia systems
Advanced grid-forming controlfor low-inertia systemsFlorian DorflerETH Zurich Emerging Topics in Control of Power Systems
Acknowledgements
Marcello Colombino
Dominic Groß
Ali Tayyebi-Khameneh
Irina Subotic
!
! ! ! ! ! ! ! ! ! !!!!!!!!!!!!!!!!Contact:!!!!!!!!!!!!!!!!!!!!!Dr.!Christian!Schaffner!ESC!!!!!!!!!!!!!!!!!Tel:!+41!44!632!72!55!
! ! ! ! ! ! !!!!!!!!!!!!!!!!E<mail:[email protected]!
!
Seed Projects Energy Fund – Workshop Agenda Monday, 24 August, 2015, 12:45 – 19:00
ETH Zurich, Room CLA J1, Tannenstrasse 3, CH-8092 Zurich
Attendees Energy Fund Donors (only until 18:15) Evaluation Committee ETH Zürich P.I.’s (only until 17:20)
Programme
Start Finish Item Lead Proposal Number
12:45 12:50 Welcome & Introductions Christian Schaffner
12:50 13:10 Exact Boundary Conditions for modelling surface topography in finite-difference methods PI: Johan Robertsson 1
13:10 13:30 Navigating the renewable energy transition: modeling power, heat, climate impacts, and the feasibility of future energy visions
PI: Anthony Patt 2
13:30 13:50 Vulnerabilities of the Water-Energy Nexus PI: Giovanni Sansavini 3
13:50 14:10 Development of highly active and selective methanol synthesis catalysts to provide a versatile storage concept for surplus renewable energy.
PI: Christophe Copéret 4
14:10 14:25 Refreshment Break 1
14:25 14:45 Computationally tailored redox materials for efficient solar fuel production from CO2 and H2O PI: Aldo Steinfeld 5
14:45 15:05 Novel control approaches for low-inertia power grids PI: Florian Dörfler 6
15:05 15:25 High-efficiency thin-film CIGS photovoltaic/thermal hybrid system for building integration PI: Arno Schlüter 7
15:25 15:45 Behavioural and technical optimisation for building energy efficiency and flexibility PI: John Lygeros 8
15:45 16:00 Refreshment Break 2
16:00 16:20 Smart Monitoring of Dams for Sustainable Hydropower Energy Infrastructure PI: Eleni Chatzi 9
16:20 16:40 A novel theoretical and numerical framework to predict and control aero-acoustic instabilities in energy systems PI: Nicolas Noiray 10
16:40 17:00 Enabling Deployment while Leaving Room for Experimentation: Toward a Framework for Renewable Energy Financing in Emerging Economies
PI: Tobias Schmidt 11
17:00 17:20 Storage of renewable energy: methanol via hydrothermal processing of wet biomass
PI: Alexander Wokaun 12
17:20 17:30 Break
17:30 18:15 Assessment of the proposals: with donors Marco Mazzotti
18:15 19:00 Assessment of the proposals: without donors Marco Mazzotti
!
! ! ! ! ! ! ! ! ! !!!!!!!!!!!!!!!!Contact:!!!!!!!!!!!!!!!!!!!!!Dr.!Christian!Schaffner!ESC!!!!!!!!!!!!!!!!!Tel:!+41!44!632!72!55!
! ! ! ! ! ! !!!!!!!!!!!!!!!!E<mail:[email protected]!
!
Seed Projects Energy Fund – Workshop Agenda Monday, 24 August, 2015, 12:45 – 19:00
ETH Zurich, Room CLA J1, Tannenstrasse 3, CH-8092 Zurich
Attendees Energy Fund Donors (only until 18:15) Evaluation Committee ETH Zürich P.I.’s (only until 17:20)
Programme
Start Finish Item Lead Proposal Number
12:45 12:50 Welcome & Introductions Christian Schaffner
12:50 13:10 Exact Boundary Conditions for modelling surface topography in finite-difference methods PI: Johan Robertsson 1
13:10 13:30 Navigating the renewable energy transition: modeling power, heat, climate impacts, and the feasibility of future energy visions
PI: Anthony Patt 2
13:30 13:50 Vulnerabilities of the Water-Energy Nexus PI: Giovanni Sansavini 3
13:50 14:10 Development of highly active and selective methanol synthesis catalysts to provide a versatile storage concept for surplus renewable energy.
PI: Christophe Copéret 4
14:10 14:25 Refreshment Break 1
14:25 14:45 Computationally tailored redox materials for efficient solar fuel production from CO2 and H2O PI: Aldo Steinfeld 5
14:45 15:05 Novel control approaches for low-inertia power grids PI: Florian Dörfler 6
15:05 15:25 High-efficiency thin-film CIGS photovoltaic/thermal hybrid system for building integration PI: Arno Schlüter 7
15:25 15:45 Behavioural and technical optimisation for building energy efficiency and flexibility PI: John Lygeros 8
15:45 16:00 Refreshment Break 2
16:00 16:20 Smart Monitoring of Dams for Sustainable Hydropower Energy Infrastructure PI: Eleni Chatzi 9
16:20 16:40 A novel theoretical and numerical framework to predict and control aero-acoustic instabilities in energy systems PI: Nicolas Noiray 10
16:40 17:00 Enabling Deployment while Leaving Room for Experimentation: Toward a Framework for Renewable Energy Financing in Emerging Economies
PI: Tobias Schmidt 11
17:00 17:20 Storage of renewable energy: methanol via hydrothermal processing of wet biomass
PI: Alexander Wokaun 12
17:20 17:30 Break
17:30 18:15 Assessment of the proposals: with donors Marco Mazzotti
18:15 19:00 Assessment of the proposals: without donors Marco Mazzotti
Further: T. Jouini, C. Arghir, A. Anta, B. Johnson, M. Sinha, & S. Dhople1

Replacing the power system foundation
fuel & synchronous machines
– not sustainable
+ central & dispatchable generation
+ large rotational inertia as buffer
+ self-synchronize through the grid
+ resilient voltage / frequency control
– slow actuation & control
renewables & power electronics
+ sustainable
– distributed & variable generation
– almost no energy storage
– no inherent self-synchronization
– fragile voltage / frequency control
+ fast / flexible / modular control
2
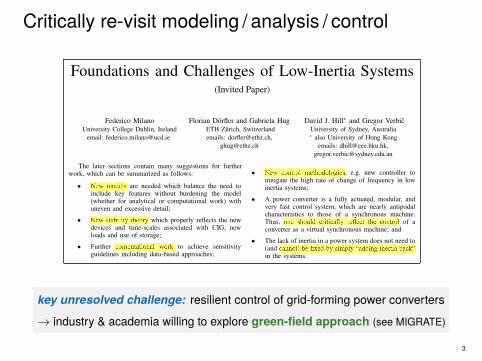
Critically re-visit modeling / analysis / control
Foundations and Challenges of Low-Inertia Systems(Invited Paper)
Federico MilanoUniversity College Dublin, Ireland
email: [email protected]
Florian Dorfler and Gabriela HugETH Zurich, Switzerlandemails: [email protected],
David J. Hill∗ and Gregor VerbicUniversity of Sydney, Australia∗ also University of Hong Kong
emails: [email protected],[email protected]
• New models are needed which balance the need toinclude key features without burdening the model(whether for analytical or computational work) withuneven and excessive detail;
• New stability theory which properly reflects the newdevices and time-scales associated with CIG, newloads and use of storage;
• Further computational work to achieve sensitivityguidelines including data-based approaches;
• New control methodologies, e.g. new controller tomitigate the high rate of change of frequency in lowinertia systems;
• A power converter is a fully actuated, modular, andvery fast control system, which are nearly antipodalcharacteristics to those of a synchronous machine.Thus, one should critically reflect the control of aconverter as a virtual synchronous machine; and
• The lack of inertia in a power system does not need to(and cannot) be fixed by simply “adding inertia back”in the systems.
The later sections contain many suggestions for furtherwork, which can be summarized as follows:
key unresolved challenge: resilient control of grid-forming power converters
→ industry & academia willing to explore green-field approach (see MIGRATE)
3
Outline
Introduction: Low-Inertia Power Systems
Problem Setup: Modeling and Specifications
State of the Art Grid-Forming Control
Comparison & Discussion
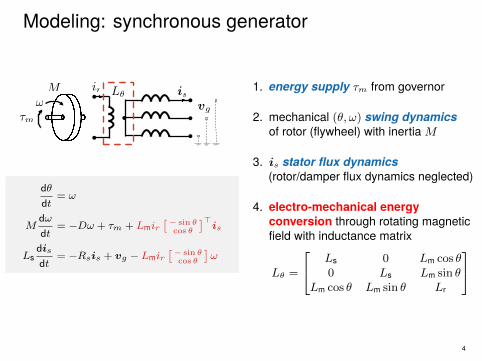
Modeling: synchronous generator
Mω
τmvg
ir Lθ is
dθ
dt= ω
Mdω
dt= −Dω + τm + Lmir
[− sin θcos θ
]>is
Lsdis
dt= −Rsis + vg − Lmir
[− sin θcos θ
]ω
1. energy supply τm from governor
2. mechanical (θ, ω) swing dynamicsof rotor (flywheel) with inertia M
3. is stator flux dynamics(rotor/damper flux dynamics neglected)
4. electro-mechanical energyconversion through rotating magneticfield with inductance matrix
Lθ =
Ls 0 Lm cos θ0 Ls Lm sin θ
Lm cos θ Lm sin θ Lr
4
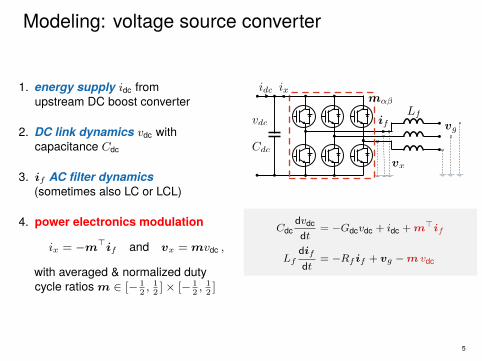
Modeling: voltage source converter
1. energy supply idc fromupstream DC boost converter
2. DC link dynamics vdc withcapacitance Cdc
3. if AC filter dynamics(sometimes also LC or LCL)
4. power electronics modulation
ix = −m>if and vx = mvdc ,
with averaged & normalized dutycycle ratios m ∈ [− 1
2, 12]× [− 1
2, 12]
vgvdc
idc
Cdc
ix
vx
ifLf
mαβ
Cdcdvdcdt
= −Gdcvdc + idc +m>if
Lfdif
dt= −Rf if + vg −m vdc
5

Comparison: conversion mechanismsM
ωτm
vg
ir Lθ is
dθ
dt= ω
Mdω
dt= −Dω + τm + Lmir
[− sin θcos θ
]>is
Lsdis
dt= −Rsis + vg − Lmir
[− sin θcos θ
]ω
vgvdc
idc
Cdc
ifLf
m
Cdcdvdcdt
= −Gdcvdc + idc +m>if
Lfdif
dt= −Rf if + vg −m vdc
controllable
energy
supply
energy
storage
controllable
energy
conversion
AC power
system
τm (slow)vs.
idc (fast)
M (large)vs.
Cdc (small)
Lθ (physical)vs.
m (control)
resilientvs.
fragile(over-currents)
physical & robustvs.
controlled & agilesignal / energy
transformer6
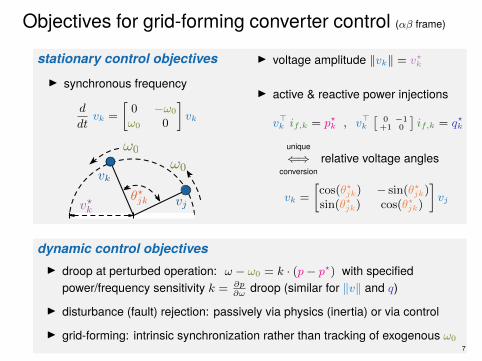
Objectives for grid-forming converter control (αβ frame)
stationary control objectivesI synchronous frequency
d
dtvk =
[0 −ω0
ω0 0
]vk
θ⋆jk
vk
vjv⋆k
ω0
ω0
I voltage amplitude ‖vk‖ = v?k
I active & reactive power injections
v>k if,k = p?k , v>k[
0 −1+1 0
]if,k = q?k
unique⇐⇒
conversionrelative voltage angles
vk =
[cos(θ?jk) − sin(θ?jk)sin(θ?jk) cos(θ?jk)
]vj
dynamic control objectivesI droop at perturbed operation: ω − ω0 = k · (p− p?) with specified
power/frequency sensitivity k = ∂p∂ω
droop (similar for ‖v‖ and q)
I disturbance (fault) rejection: passively via physics (inertia) or via control
I grid-forming: intrinsic synchronization rather than tracking of exogenous ω07
Naive baseline solution: emulation of virtual inertia
!""" #$%&'%(#!)&' )& *)+"$ ','#"-'. /)01 23. &)1 2. -%, 2456 5676
!89:;8;<=><? />@=AB: !<;@=>B >< CD!EFGBH;I
+><I *JK;@ E;<;@B=>J<-JLB88BI@;MB DBNLB@> -J?LBIIB8 %@B<>! "#$%&'# (&)*&+! ,---. B<I "LBO D1 ":F'BBIB<P! "&'./+ (&)*&+! ,---
!"#$%&'"'() %* +$,(-.'() /'-#%(-'
.( 0.1$%2$.3- 4-.(2 5.$)6,7 !('$).,8.".-9 :%(.! "#$%&'# (&)*&+! ,---; :6$<,(,$,<,(, =%%77,! (&)*&+! ,---; ,(3
06>67 ?@ ?9,(3%$>,$! (&)*&+! ,---
Virtual synchronous generators: A survey and new perspectives
Hassan Bevrani a,b,⇑, Toshifumi Ise b, Yushi Miura b
aDept. of Electrical and Computer Eng., University of Kurdistan, PO Box 416, Sanandaj, IranbDept. of Electrical, Electronic and Information Eng., Osaka University, Osaka, Japan
!"#$%&'()*+,-+#'"(./#0*/1(2-33/*04($(5&*0-$1((
6#+*0&$(7*/8&9+9(:"(!&;0*&:-0+9(<#+*="(20/*$=+(
0/(6;/1$0+9(7/>+*(2";0+%;((?$-0@&+*(!+1&11+A(!"#$"%&'()))A(B*-#/()*$#C/&;A(*"+,-%'!"#$"%&'()))A($#9(?&11+;(D$1$*$#=+(
!""" #$%&'%(#!)&' )& *)+"$ ','#"-'. /)01 23. &)1 2. -%, 2456
!789:;< "=>?<:;@7 (@7:9@? ':9<:8AB C@9
/'(DE/F( #9<7G=;GG;@7 'BG:8=GH;8I8; JK>. (<=LI8?? F1 M@@:K. N9<;7 *1 %O<=. %7O98P H1 $@GQ@8. <7O (K9;G N1 M9;AK:
!"#$%&#'$%()*+'",'"%-#,.%/#",012%3#*',#4%
5,)"16'%7898:%+1*%;'<'*=''4>
?%@%58;8A8%$'%A11*
?@%!"#$%&'("()"&*'+,,,@%98%/1"'21
B%1*$%38%/#<<4.'"
C@%
!"#$%&'("()"&'+,,,%
8
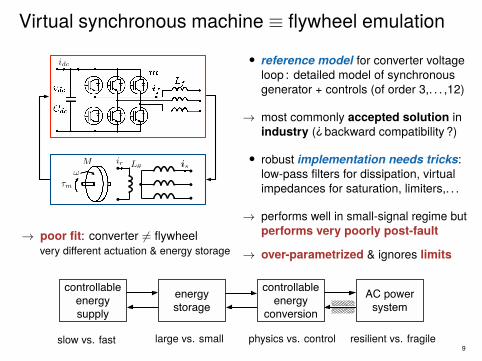
Virtual synchronous machine ≡ flywheel emulation
vdc
idc
Cdc
ifLf
m
Mω
τm
ir Lθ is
→ poor fit: converter 6= flywheelvery different actuation & energy storage
• reference model for converter voltageloop : detailed model of synchronousgenerator + controls (of order 3,. . . ,12)
→ most commonly accepted solution inindustry (
?
backward compatibility ?)
• robust implementation needs tricks:low-pass filters for dissipation, virtualimpedances for saturation, limiters,. . .
→ performs well in small-signal regime butperforms very poorly post-fault
→ over-parametrized & ignores limits
controllable
energy
supply
energy
storage
controllable
energy
conversion
AC power
system
slow vs. fast large vs. small physics vs. control resilient vs. fragile9
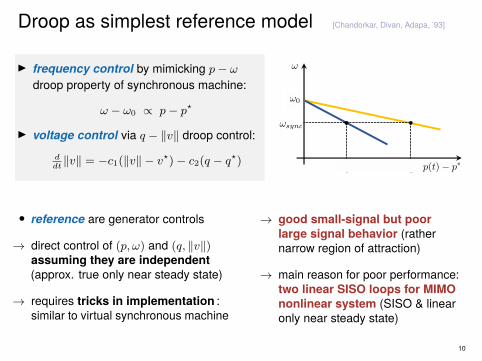
Droop as simplest reference model [Chandorkar, Divan, Adapa, ’93]
I frequency control by mimicking p− ωdroop property of synchronous machine:
ω − ω0 ∝ p− p?
I voltage control via q − ‖v‖ droop control:ddt‖v‖ = −c1(‖v‖ − v?)− c2(q − q?)
P2P1P
!
!*
!syncωsync
ω
p(t) − p∗
ω0
• reference are generator controls
→ direct control of (p, ω) and (q, ‖v‖)assuming they are independent(approx. true only near steady state)
→ requires tricks in implementation :similar to virtual synchronous machine
→ good small-signal but poorlarge signal behavior (rathernarrow region of attraction)
→ main reason for poor performance:two linear SISO loops for MIMOnonlinear system (SISO & linearonly near steady state)
10
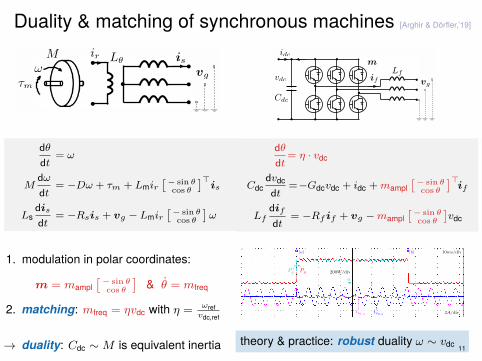
Duality & matching of synchronous machines [Arghir & Dorfler,’19]
Mω
τmvg
ir Lθ is
dθ
dt= ω
Mdω
dt= −Dω + τm + Lmir
[− sin θcos θ
]>is
Lsdis
dt= −Rsis + vg − Lmir
[− sin θcos θ
]ω
vgvdc
idc
Cdc
ifLf
m
dθ
dt= η · vdc
Cdcdvdcdt
=−Gdcvdc + idc +mampl[− sin θ
cos θ
]>if
Lfdif
dt= −Rf if + vg −mampl
[− sin θcos θ
]vdc
1. modulation in polar coordinates:
m = mampl[− sin θ
cos θ
]& θ = mfreq
2. matching: mfreq = ηvdc with η = ωrefvdc,ref
→ duality: Cdc ∼M is equivalent inertia
200W/div
0
(a) (b)
2A/div
10ms/div
PgP ∗g
is2,ais1,a
theory & practice: robust duality ω ∼ vdc 11
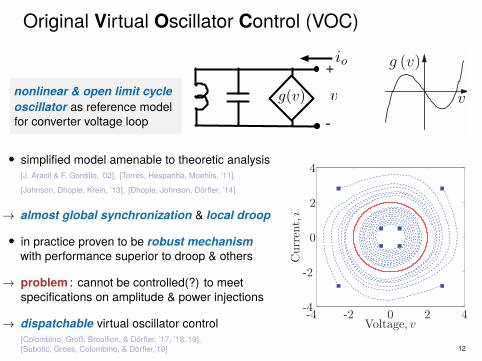
Original Virtual Oscillator Control (VOC)
nonlinear & open limit cycleoscillator as reference modelfor converter voltage loop
+
-
g(v) v
io
−
+
v v
)v(g
• simplified model amenable to theoretic analysis[J. Aracil & F. Gordillo, ’02], [Torres, Hespanha, Moehlis, ’11],
[Johnson, Dhople, Krein, ’13], [Dhople, Johnson, Dorfler, ’14]
→ almost global synchronization & local droop
• in practice proven to be robust mechanismwith performance superior to droop & others
→ problem : cannot be controlled(?) to meetspecifications on amplitude & power injections
→ dispatchable virtual oscillator control[Colombino, Groß, Brouillon, & Dorfler, ’17, ’18,’19],[Subotic, Gross, Colombino, & Dorfler,’19]
−4 −2 0 2 4−4
−2
0
2
4
Voltage, v
Curr
ent,
i
12

Colorful idea: closed-loop target dynamics
θ⋆jk
vk
vjv⋆k
ω0
ω0
d
dtvk =
[0 −ω0
ω0 0
]vk︸ ︷︷ ︸
rotation at ω
+ c2 ·(‖vk‖?2 − ‖vk‖2
)vk︸ ︷︷ ︸
amplitude regulation to v?k
+ c1 ·n∑j=1
wjk
(vj −
[cos(θ?jk) − sin(θ?jk)
sin(θ?jk) cos(θ?jk)
]vk
)︸ ︷︷ ︸
synchronization to desired relative angles θ?jk13
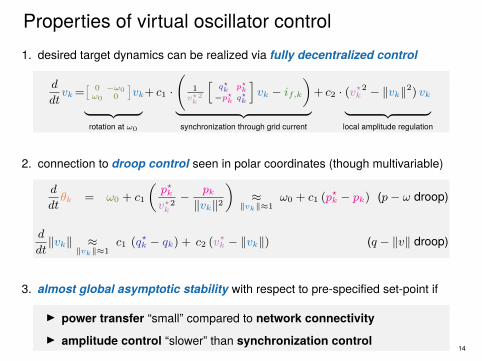
Properties of virtual oscillator control1. desired target dynamics can be realized via fully decentralized control
d
dtvk=
[0 −ω0ω0 0
]vk︸ ︷︷ ︸
rotation at ω0
+ c1 ·
(1v?k2
[q?k p?k−p?k q?k
]vk − if,k
)︸ ︷︷ ︸
synchronization through grid current
+ c2 · (v?k2 − ‖vk‖2) vk︸ ︷︷ ︸local amplitude regulation
2. connection to droop control seen in polar coordinates (though multivariable)
d
dtθk = ω0 + c1
(p?kv?k
2− pk‖vk‖2
)≈
‖vk‖≈1ω0 + c1 (p
?k − pk) (p− ω droop)
d
dt‖vk‖ ≈
‖vk‖≈1c1 (q?k − qk) + c2 (v
?k − ‖vk‖) (q − ‖v‖ droop)
3. almost global asymptotic stability with respect to pre-specified set-point if
I power transfer “small” compared to network connectivityI amplitude control “slower” than synchronization control
14
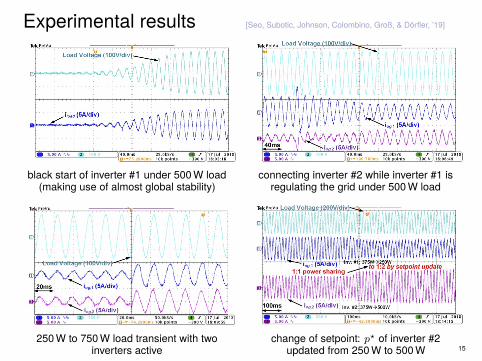
Experimental results [Seo, Subotic, Johnson, Colombino, Groß, & Dorfler, ’19]
black start of inverter #1 under 500 W load(making use of almost global stability)
250 W to 750 W load transient with twoinverters active
connecting inverter #2 while inverter #1 isregulating the grid under 500 W load
change of setpoint: p? of inverter #2updated from 250 W to 500 W 15
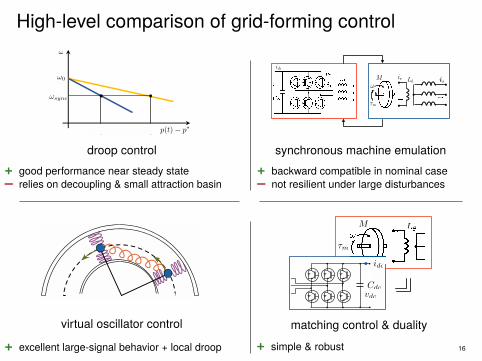
High-level comparison of grid-forming control
P2P1P
!
!*
!syncωsync
ω
p(t) − p∗
ω0
droop control+ good performance near steady state– relies on decoupling & small attraction basin
vdc
idc
Cdc
ifLf
mM
ω
τm
ir Lθ is
synchronous machine emulation+ backward compatible in nominal case– not resilient under large disturbances
virtual oscillator control
+ excellent large-signal behavior + local droop
Mω
τm
Lθ
vdc
idc
Cdc
matching control & duality+ simple & robust 16
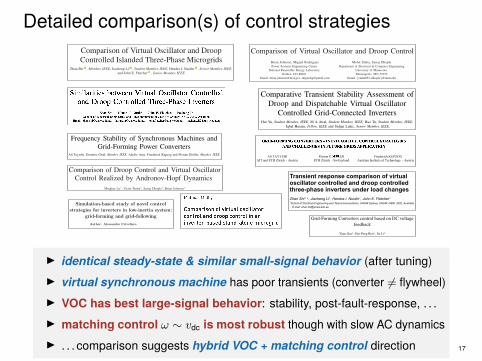
Detailed comparison(s) of control strategies
Frequency Stability of Synchronous Machines andGrid-Forming Power Converters
Ali Tayyebi, Dominic Groß, Member, IEEE, Adolfo Anta, Friederich Kupzog and Florian Dörfler, Member, IEEE
Comparative Transient Stability Assessment ofDroop and Dispatchable Virtual Oscillator
Controlled Grid-Connected InvertersHui Yu, Student Member, IEEE, M A Awal, Student Member, IEEE, Hao Tu, Student Member, IEEE,
Iqbal Husain, Fellow, IEEE and Srdjan Lukic, Senior Member, IEEE,
Comparison of Virtual Oscillator and Droop ControlBrian Johnson, Miguel RodriguezPower Systems Engineering Center
National Renewable Energy LaboratoryGolden, CO 80401
Email: [email protected], [email protected]
Mohit Sinha, Sairaj DhopleDepartment of Electrical & Computer Engineering
University of MinnesotaMinneapolis, MN 55455
Email: {sinha052,sdhople}@umn.edu
Transient response comparison of virtualoscillator controlled and droop controlledthree-phase inverters under load changes
Zhan Shi1 , Jiacheng Li1, Hendra I. Nurdin1, John E. Fletcher1
1School of Electrical Engineering and Telecommunications, UNSW Sydney, UNSW, NSW, 2052, Australia
E-mail: [email protected]
Comparison of Virtual Oscillator and Droop
Controlled Islanded Three-Phase MicrogridsZhan Shi , Member, IEEE, Jiacheng Li , Student Member, IEEE, Hendra I. Nurdin , Senior Member, IEEE,
and John E. Fletcher , Senior Member, IEEE
GRID-FORMING CONVERTERS ! INEVITABILITY, CONTROL STRATEGIES
AND CHALLENGES IN FUTURE GRIDS APPLICATION
Ali TAYYEBI Florian DÖRFLER Friederich KUPZOG AIT and ETH Zürich ! Austria ETH Zürich ! Switzerland Austrian Institute of Technology ! Austria
Simulation-based study of novel controlstrategies for inverters in low-inertia system:
grid-forming and grid-followingAuthor: Alessandro Crivellaro
Grid-Forming Converters control based on DC voltagefeedback
Yuan Gaoa,, Hai-Peng Rena,, Jie Lia,
Comparison of Droop Control and Virtual OscillatorControl Realized by Andronov-Hopf Dynamics
Minghui Lu∗, Victor Purba†, Sairaj Dhople†, Brian Johnson∗∗Department of Electrical and Computer Engineering, University of Washington, Seattle, WA 98195
I identical steady-state & similar small-signal behavior (after tuning)I virtual synchronous machine has poor transients (converter 6= flywheel)I VOC has best large-signal behavior: stability, post-fault-response, . . .I matching control ω ∼ vdc is most robust though with slow AC dynamicsI . . . comparison suggests hybrid VOC + matching control direction 17
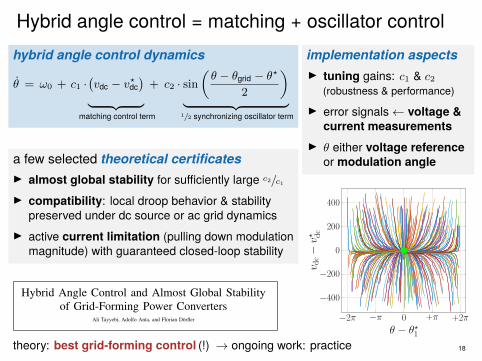
Hybrid angle control = matching + oscillator controlhybrid angle control dynamics
θ = ω0 + c1 ·(vdc − v?dc
)︸ ︷︷ ︸
matching control term
+ c2 · sin(θ − θgrid − θ?
2
)︸ ︷︷ ︸1/2 synchronizing oscillator term
a few selected theoretical certificatesI almost global stability for sufficiently large c2/c1
I compatibility: local droop behavior & stabilitypreserved under dc source or ac grid dynamics
I active current limitation (pulling down modulationmagnitude) with guaranteed closed-loop stability
1
Hybrid Angle Control and Almost Global Stabilityof Grid-Forming Power Converters
Ali Tayyebi, Adolfo Anta, and Florian Dorfler
Abstract—This paper introduces a new grid-forming controlfor power converters, termed hybrid angle control (HAC) thatensures the almost global closed-loop stability. HAC combinesthe recently proposed matching control with a novel nonlinearangle feedback reminiscent of (though not identical to) classicdroop and dispatchable virtual oscillator controls. The synthesisof HAC is inspired by the complementary benefits of the dc-basedmatching and ac-based grid-forming controls as well as ideasfrom direct angle control and nonlinear damping assignment. Theproposed HAC is applied to a high-fidelity nonlinear convertermodel that is connected to an infinite bus or a center-of-inertiadynamic grid models via a dynamic inductive line. We provideinsightful parametric conditions for the existence, uniqueness,and global stability of the closed-loop equilibria. Unlike relatedstability certificates, our parametric conditions do not demandstrong physical damping, on the contrary they can be met byappropriate choice of control parameters. Moreover, we considerthe safety constraints of power converters and synthesize a newcurrent-limiting control that is compatible with HAC. Last, wepresent a practical implementation of HAC and uncover itsintrinsic droop behavior, derive a feedforward ac voltage andpower control, and illustrate the behavior of the closed-loopsystem with publicly available numerical examples.
Index Terms—grid-forming converter control, current-limitingcontrol, power system stability, hybrid angle control.
I. INTRODUCTION
The Generation technology in power system has been dras-tically changing in recent years. The increasing replacementof bulk synchronous generators (SG) with converter-interfacedgeneration is transforming the power system to a so-calledlow-inertia system. The stability aftermath of this transitionis highlighted by significant inertia reduction, fluctuating ac-tuation (i.e., volatile generation), and the potential adverseinteractions due to the presence of adjacent timescales [1]–[7],among others. The grid-forming control concept is envisionedto address the aforementioned stability challenges, wherebythe converter features frequency and voltage regulation, black-start, and load-sharing capabilities [8].
Several grid-forming control techniques have been recentlyproposed. Droop control mimics the speed droop of SG, con-trols the modulation angle proportional to the active power im-balance, and is widely recognized as the baseline solution [9],
A. Tayyebi (the corresponding author) is with the Austrian Institute ofTechnology, 1210 Vienna, Austria, and also with the Automatic ControlLaboratory, ETH Zurich, 8092 Zurich, Switzerland, e-mail: [email protected].
A. Anta is with the Austrian Institute of Technology, 1210 Vienna, Austria,e-mail: [email protected].
F. Dorfler is with the Automatic Control Laboratory, ETH Zurich, 8092Zurich, Switzerland, e-mail: [email protected].
This work was partially funded by the independent research fund of theAustrian Institute for Technology, and ETH Zurich funds.
[10]. As a natural extension of droop control, the emulation ofSG dynamics and control led to virtual synchronous machine(VSM) strategies [11], [12]. The recently proposed matchingcontrol exploits structural similarities of the converter and SG;and matches their dynamics by controlling the modulationangle according to the dc voltage [13]–[17]. Furthermore,virtual oscillator control (VOC) mimics the dynamical be-havior of Lienard-type oscillators and globally synchronizesa converter-based network [18], [19]. Recently, dispatchablevirtual oscillator control (dVOC) is proposed that ensuresalmost global synchronization of a homogeneous networkof oscillator-controlled inverters (with simplified dynamics)to pre-specified set-points consistent with the power flowequations [20], [21] (also see [22] for a comparative transientstability assessment of dVOC and droop control).
A comparison of the aforementioned control strategiesreveals complementary benefits; see [2, Rem. 2]: dc-basedmatching techniques are robust with respect to (w.r.t.) the load-induced over-currents and ac-based techniques (droop, VSM,and especially dVOC) have superior transient performance.Here we leverage these complementary benefits and design ahybrid angle control (HAC) which combines matching controland a nonlinear angle feedback (reminiscent of, though notidentical to, droop control and dVOC) and is inspired by ideasfrom direct angle control [17] and sign-indefinite nonlineardamping assignment [23], [24]. Our proposed controller al-most globally stabilizes the closed-loop converter dynamicswhen connected via an inductive line to either an infinitebus (IB) or a dynamic center-of-inertia (COI) grid model.We provide insightful parametric conditions for the existence,uniqueness, and almost global stability of closed-loop equi-libria. Last but not least, we take into account the convertersafety constraints, design a new current-limiting control, andinvestigate its stability in combination with HAC.
In contrast to most other related works, we consider a high-fidelity converter model including an explicit representation ofenergy source dynamics, the dc bus, LC filter, line dynamics,COI grid dynamics, and the converter set-points. In compari-son to related stability certificates [17], [25], [26], our stabilityconditions do not demand strong physical damping, but theycan be met by appropriate choice of control gains.
Moreover, our complementary choice of the angle-dependent terms in the Lyapunov / LaSalle function andin the HAC formulation overcomes the analysis obstaclesarising from lack of damping in angle state. Finally, weconclude this paper with some extensions, namely: a practicalimplementation and droop behavior of the HAC is described, afeedforward ac voltage and power control is discussed, and the
Limited circulation. For review onlyIEEE-TAC Submission no.: 20-1438.1
Preprint submitted to IEEE Transactions on Automatic Control. Received: August 17, 2020 15:10:30 PST
theory: best grid-forming control (!) → ongoing work: practice
implementation aspectsI tuning gains: c1 & c2
(robustness & performance)
I error signals← voltage ¤t measurements
I θ either voltage referenceor modulation angle
−2π −π 0 +π +2π
−400
−200
0
200
400
θ − θ?1
v dc−v? dc
−2π −π 0 +π +2π
−400
−200
0
200
400
θ − θ?1
v dc−v? dc
1
18
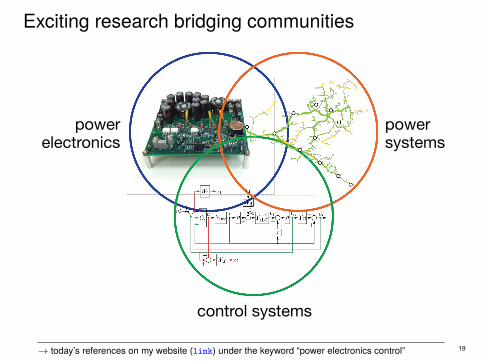
Exciting research bridging communities
powerelectronics
powersystems
control systems
→ today’s references on my website (link) under the keyword “power electronics control” 19


















