Adaptive surrogate modeling for optimization of flood control detention dams
15
Adaptive surrogate modeling for optimization of flood control detention dams J. Yazdi, S.A.A. Salehi Neyshabouri * Faculty of Civil and Environmental Engineering, Tarbiat Modares University, Tehran, Iran article info Article history: Received 24 October 2013 Received in revised form 5 July 2014 Accepted 8 July 2014 Available online Keywords: Optimization Adaptive neural network Simulation Meta-modeling Flood management abstract Real world optimization problems commonly require complex computationally demanding models which use in practice could be limited. To address this drawback, different meta-modeling approaches have been proposed in the literature. This study represents an adaptive meta-modeling framework to solve a high dimensional design problem by coupling a hydrodynamic model, a multi objective genetic algorithm and artificial neural network as the surrogate model. The proposed dynamic learning approach includes special space filling techniques and control strategies to periodically update surrogate model and keep the fidelity level of solutions as the optimization progresses. An experimental application on flood management based on a case study in Iran was carried out in order to test the efficiency of the proposed approach. Results showed the approach provides a 74% time saving while maintaining the quality of solutions when compared with those of the original simulation model indicating the viability of the approach. © 2014 Elsevier Ltd. All rights reserved. 1. Introduction Using mathematical models for system identification and assessing different design alternatives and operational strategies is of extreme interest in water resources modeling and analyses. Mathematical or numerical models have been widely used in different disciplines of water resources systems including water distribution systems (Zecchin et al., 2006; Guidolin et al., 2012; Giustolisi et al., 2012; Fu et al., 2012), ground water modeling and remediation (Solomatine et al.,1999; Yan and Minsker, 2006), waste load allocation in rivers (Mujmadar and Vemula, 2004; Murty et al., 2006), water quality management in reservoirs (Ostfeld and Salomonst, 2005; Kerachian and Karamouz, 2007; Afshar et al., 2011), flood routing in real time operation (Ngo et al., 2007; Bayat, 2011), floodplain system design (Ahmad and Simonovic, 2011; Yazdi and Salehi Neyshabouri, 2012) and urban storm manage- ment (Dawson et al., 2008; Leandro et al., 2009, 2011; Barreto et al., 2010; Sun et al., 2011; Delelegn et al., 2011; Sayers et al., 2014). Mathematical models however, tend to be computationally expensive as they try to precisely model the details of real world systems. The majority of these models solve numerically and iteratively the partial differential equations of flow and transport which are usually a simplified version of extremely complex NaviereStokes equations in fluid dynamics and they cannot be solved analytically. Running time of optimization algorithms be- comes high when the aforementioned models tend to be used in optimization routines. The modeling complexity is significantly increased when system uncertainties is also accounted as many model realizations are required. To alleviate this problem, a wide variety of function approximation methods known as meta- modeling or surrogate modeling has been proposed in the literature. A meta-model is a fast-to-run surrogate model implemented in large scale problems to replace and emulate the real simulation model having large computational budget. Some of the well-known approximating techniques can typically be enumerated as: kriging, polynomial functions, artificial neural networks (ANN), radial basis functions (RBF), k-nearest neighbor (K-NN), Gaussian emulator machines, support vector machines (SVM), smoothing splines, ANOVA models, etc. Meta-models have been in existence for a fairly long period of time and are widely used by the engineering design community to reduce the time required for full simulation (Khu et al., 2004). Some examples of these applications in water re- sources and environmental systems are as automatic model cali- bration (Liong et al., 2001; Mugunthan et al., 2005; Zou et al., 2007), uncertainty analysis in model calibration (Khu and Werner, 2003; Schultz et al., 2004, 2006; Bliznyuk et al., 2008; Zhang et al., 2009), water distribution system design optimization (Broad * Corresponding author. E-mail addresses: [email protected] (J. Yazdi), [email protected] (S.A.A. Salehi Neyshabouri). Contents lists available at ScienceDirect Environmental Modelling & Software journal homepage: www.elsevier.com/locate/envsoft http://dx.doi.org/10.1016/j.envsoft.2014.07.007 1364-8152/© 2014 Elsevier Ltd. All rights reserved. Environmental Modelling & Software 61 (2014) 106e120
Transcript of Adaptive surrogate modeling for optimization of flood control detention dams

lable at ScienceDirect
Environmental Modelling & Software 61 (2014) 106e120
Contents lists avai
Environmental Modelling & Software
journal homepage: www.elsevier .com/locate/envsoft
Adaptive surrogate modeling for optimization of flood controldetention dams
J. Yazdi, S.A.A. Salehi Neyshabouri*
Faculty of Civil and Environmental Engineering, Tarbiat Modares University, Tehran, Iran
a r t i c l e i n f o
Article history:Received 24 October 2013Received in revised form5 July 2014Accepted 8 July 2014Available online
Keywords:OptimizationAdaptive neural networkSimulationMeta-modelingFlood management
* Corresponding author.E-mail addresses: [email protected] (J. Y
(S.A.A. Salehi Neyshabouri).
http://dx.doi.org/10.1016/j.envsoft.2014.07.0071364-8152/© 2014 Elsevier Ltd. All rights reserved.
a b s t r a c t
Real world optimization problems commonly require complex computationally demanding modelswhich use in practice could be limited. To address this drawback, different meta-modeling approacheshave been proposed in the literature. This study represents an adaptive meta-modeling framework tosolve a high dimensional design problem by coupling a hydrodynamic model, a multi objective geneticalgorithm and artificial neural network as the surrogate model. The proposed dynamic learning approachincludes special space filling techniques and control strategies to periodically update surrogate modeland keep the fidelity level of solutions as the optimization progresses. An experimental application onflood management based on a case study in Iran was carried out in order to test the efficiency of theproposed approach. Results showed the approach provides a 74% time saving while maintaining thequality of solutions when compared with those of the original simulation model indicating the viabilityof the approach.
© 2014 Elsevier Ltd. All rights reserved.
1. Introduction
Using mathematical models for system identification andassessing different design alternatives and operational strategies isof extreme interest in water resources modeling and analyses.Mathematical or numerical models have been widely used indifferent disciplines of water resources systems including waterdistribution systems (Zecchin et al., 2006; Guidolin et al., 2012;Giustolisi et al., 2012; Fu et al., 2012), ground water modeling andremediation (Solomatine et al.,1999; Yan andMinsker, 2006), wasteload allocation in rivers (Mujmadar and Vemula, 2004; Murty et al.,2006), water quality management in reservoirs (Ostfeld andSalomonst, 2005; Kerachian and Karamouz, 2007; Afshar et al.,2011), flood routing in real time operation (Ngo et al., 2007; Bayat,2011), floodplain system design (Ahmad and Simonovic, 2011;Yazdi and Salehi Neyshabouri, 2012) and urban storm manage-ment (Dawson et al., 2008; Leandro et al., 2009, 2011; Barreto et al.,2010; Sun et al., 2011; Delelegn et al., 2011; Sayers et al., 2014).Mathematical models however, tend to be computationallyexpensive as they try to precisely model the details of real worldsystems. The majority of these models solve numerically and
azdi), [email protected]
iteratively the partial differential equations of flow and transportwhich are usually a simplified version of extremely complexNaviereStokes equations in fluid dynamics and they cannot besolved analytically. Running time of optimization algorithms be-comes high when the aforementioned models tend to be used inoptimization routines. The modeling complexity is significantlyincreased when system uncertainties is also accounted as manymodel realizations are required. To alleviate this problem, a widevariety of function approximation methods known as meta-modelingor surrogatemodeling has beenproposed in the literature.
A meta-model is a fast-to-run surrogate model implemented inlarge scale problems to replace and emulate the real simulationmodel having large computational budget. Some of thewell-knownapproximating techniques can typically be enumerated as: kriging,polynomial functions, artificial neural networks (ANN), radial basisfunctions (RBF), k-nearest neighbor (K-NN), Gaussian emulatormachines, support vector machines (SVM), smoothing splines,ANOVAmodels, etc. Meta-models have been in existence for a fairlylong period of time and are widely used by the engineering designcommunity to reduce the time required for full simulation (Khuet al., 2004). Some examples of these applications in water re-sources and environmental systems are as automatic model cali-bration (Liong et al., 2001; Mugunthan et al., 2005; Zou et al., 2007),uncertainty analysis in model calibration (Khu and Werner, 2003;Schultz et al., 2004, 2006; Bliznyuk et al., 2008; Zhang et al.,2009), water distribution system design optimization (Broad

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 107
et al., 2005, 2010), and ground water design and remediationoptimization (Johnson and Rogers, 2000). Particularly in floodmanagement applications, surrogate modeling has been used foroptimal operation of the reservoir systems. Solomatine and Torres(1996), and Bayat (2011) used static neural networks to approxi-mate the response surfaces of a hydrodynamic flood routing modelin reservoir optimization problem. Castro-Gama et al. (2014) pro-posed a polynomial multivariate regressionmeta-model in order toaddress the reservoir operation of the Yellow River. They reportedseveral limitations for these kinds of surrogate models such asinability to model nonlinear relations and correlations amongvariables, and subsequently they suggested applying more so-phisticated meta modeling approaches in future researches.
An extensive review of meta-modeling techniques has beencarried out by Santana-Quintero et al. (2010) and Ratto et al. (2012)and particularly in water resource applications can be found inRazavi et al. (2012).
Surrogate models typically suffer from potential inaccuracies infunction evaluation which may attribute to the low quality oftraining data or needing to more infill points in some regions of thesearch space to learn features of the landscape, particularly whenthe number of decision variables is high. To address these draw-backs, advanced online or adaptive meta-modeling techniqueshave been proposed in some studies. In contrast of the static meta-models (also referred to as offline meta-models) which after initialtraining are completely replaced with the original simulationmodels (such as all studies mentioned in the previous paragraph),individuals in online meta-models are selectively evaluated byeither meta-model or original simulation model during theevolutionary search process. Furthermore, the meta-models areadaptively updated a number of times, when adequate data areprovided by original simulationmodel. This approach was probablysuggested in the first time by Nain and Deb (2002) to achieve acomputationally effective search using periodic retraining of anANN surrogate model during NSGA-II progress and next theapproach was followed by others.
Gaspar-Cunha and Vieira (2005) proposed an adaptive algo-rithm which controls dynamically the number of exact andapproximate function evaluations through the determination of theerror produced by the ANN approximation in each generation forsome benchmark optimization problems. In their work, the ANNapproximation was used only when the estimated error of theneural network was lower than a pre-defined value.
In the context of water and environmental engineering, Khuet al. (2004) proposed a GA-adaptive ANN model to reduce thenumber of required simulation runs for calibration of the NAMrainfall-runoff model. Both the calibration and verification resultsindicated that the proposed method is able to achieve the same orbetter calibration performance compared to published studies us-ing traditional population-based search methods and yet requiredonly about 40% of the simulation runs on average. To reducecomputational burdens in the task of sensitivity analysis, Zhan et al.(2013) employed a static meta model, known as MARS model. Theyreported that the MARS model requires little data preparation, issuitable for handling fairly large datasets, and is flexible enough tomodel non-linearity and variable interactions, compared to othersurrogate methods.
Yan and Minsker (2006) represented an adaptive neuralnetwork genetic algorithm called ANGA for optimal groundwaterremediation design. The algorithm was applied to a discrete deci-sion problem in which the sampling frequency and selection stra-tegies were efficiently developed for choosing training data and anarchiving cache was defined for improving the GA performance.
Behzadian et al. (2009) represented a multi-objective geneticalgorithm with adaptive neural networks (MOGAeANN) to
determine optimal sampling locations for installing pressure log-gers in water distribution systems (WDSs) when parameter un-certainty was considered. The periodically retrained ANNs wereused as surrogate models during the optimization process to speedup fitness evaluations in which the best individuals of offspring(best in terms of approximate function values) were chosen forevaluating with original simulation model. Such strategies how-ever, may lead to local optima or even some failure modes (Razaviet al., 2012) when facing with high dimensional problems withmulti-modal objective functions owing to low fidelity of meta-model for the whole range of solutions in the search space.
In general, as the number of variables increase, surrogatemodeling may become less advantageous and even infeasible(Razavi et al., 2012). To overcome this problem, Kourakos andMantoglou (2009) proposed modular neural networks in whichseveral small sub-network modules, trained using a fast adaptiveprocedure, cooperate to solve a complex pumping optimizationproblem of coastal aquifers with many decision variables. Themodular sub-network implementation resulted in significantreduction in CPU time and identified an even better solution thanthe original numerical model. To reduce the number of explanatoryvariables involved in the description of response surfaces,Castelletti et al. (2012) proposed a novel data-driven DynamicEmulation Modeling (DEMo) approach and successfully used it forobtaining the optimal operating policy of a dam reservoir. The coreof this DEMo approach is the Recursive Variable Selection (RVS)algorithm, through which the state and control variables that aremost relevant in affecting the process-based model inputeoutputbehavior are selected to construct surrogate model.
Mousavi and Shourian (2010) proposed a meta-modelingapproach called adaptive sequentially space filling (ASSF) inconjunction with PSO optimization algorithm in which the regionsin the search space that need more training data were sequentiallyidentified after (in lieu of during) solving the optimization problem.Since the problem is solved with an off-line meta-model during theevolutionary optimization, the approach would not guarantee thesolution found not to be a local optimum, plateau, or saddle point inthe search space and furthermore, this methodology may also notbe adequately efficient for extremely computationally demandingproblems owing to this fact that feedback loop providing retrainingdata should probably be executed many times.
Yan and Minsker (2011) developed an efficient approach forreplacing most Monte Carlo simulations with surrogate modelswithin a noisy adaptive genetic algorithm (GA). The method wasapplied to a field scale groundwater remediation design case studywhereas the primary source of uncertainty stemmed from hy-draulic conductivity values in the aquifers were considered. Theresults showed that the method identified more cost-effective so-lutions with 86e90% less computational effort than the purelyphysically based noisy GA approach.
Bi and Dandy (2014) also applied online retrained neural net-works in conjunction with differential evolution (DE) method tocarry out optimization of water distribution system designs.Although, the on-linemeta model outperformed the offline schemein terms of efficiency and solution quality, they declared that thereis a substantial need to improve the accuracy of ANN's approxi-mations for large WDSs by developing new efficient techniques ofproviding the training data.
Despite the fact that surrogate models developed in aforemen-tioned studies (Nain and Deb, 2002; Khu et al., 2004; Yan andMinsker, 2006, 2011; Behzadian et al., 2009; Mousavi andShourian, 2010; Bi and Dandy, 2014) are adaptively updated, thefidelity level however is not explicitly controlled during theevolutionary searches and this may lead to false solutions followingdifferent generations.

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120108
In this paper, an evolutionary-based meta-model has beenproposed for flood control system design problem using NSGA-IIalgorithm and neural networks with dynamic updating, calledadaptive neural network multi objective genetic algorithm(ANMOGA). ANMOGA starts with efficient initial space-filling so-lutions and employs special strategies to choose effectively candi-date solutions for evaluating with real simulation model andupdating the surrogate model while satisfying the fidelity level ofsurrogates during various generations of evolutionary search pro-cess. The main feature of the proposed method is precisely con-trolling the meta model errors in each period of retraining. Similarto the work of Gaspar-Cunha and Vieira (2005), an error thresholdis defined for implementing ANN instead of exact function evalu-ation. But the proposed method here has two more importantfeatures:
1) When the meta-model does not satisfy the desired fidelity level,instead of evaluating all individuals in the current and/or a fewnext generations by the exact model, just a small portion ofindividuals is efficiently selected for this purpose, based on theclustering of solutions in the search space (decision variablespace). This approach is superior the former especially whenrunning the real simulation model has high computationalburden and uncertainties are also considered. Since some in-dividuals of the population are usually similar to each other,exact evaluation of all chromosomes in the population may notbe necessary to increase the “generalization ability” of neuralnetwork whereas increasing the efforts of exact evaluationsinversely decreases the efficiency of meta modeling. Clusteringthe population preserves the diversity in chosen training datawith an acceptable computational effort for exact functionevaluation. This selection strategy is not reported by others.
2) When new training data is provided, the best network archi-tecture is established according to network errors instead of justupdating theweights of a pre-defined architecture. This strategyalso efficiently reduces the number of exact evaluationsrequired to achieve threshold accuracy and thus provides highercomputational advantages.
The above mentioned strategies are very effective when per-forming the exact models is very time consuming like the studycase here. This research employs the meta modeling approachwithin the flood management application. Offline approaches havebeen already used by others for the operation of reservoir systemsin flooding periods (e.g. Solomatine and Torres, 1996; Bayat, 2011;Castro-Gama et al., 2014). The research described in this paperhighlights the advantages of adaptive meta modeling to identifyoptimal design for a set of detention dams considering rainfalluncertainties. This work may be the first effort of employingadaptive meta-modeling for optimal flood control system design,where utilizing surrogate models is clearly unavoidable due torequired large computational time arising from hydrodynamicmodeling and uncertainty analysis.
Details of the proposed adaptive approach are described in thenext sections. The rest of the paper is organized as follows: InSection 2, components of ANMOGA approach including optimiza-tion model, surrogate model, sampling and control strategies aswell as uncertainty analysis method and proposed algorithm arepresented. The application of proposed methodology is then dis-cussed for a real case study in Section 3. In Section 4, developedmodels are justified by some relevant metrics and benchmark testsand then, setup of experiments is explained in Section 5. Next,obtained results are illustrated and analyzed in Section 6 and finallythe findings are summarized and some concluding remarks areoffered in Section 7.
2. Methodology
The main stages of a static meta-modeling approach for searchor sampling algorithms can be summarized as follows:
1. Selecting a mathematical function or meta-model which can beused to approximate objective functions;
2. Running the real simulation model for a small number of solu-tions to provide training data; this stage is also called design ofexperiment (DoE);
3. Constructing, training, and validation of the meta-model usingprovided data;
4. Replacing the meta-model in lieu of simulation model for futureevaluation of the new individuals.
In adaptive meta modeling, during the search process somemodifications are dynamically made within the surrogate model toenhance the performance of emulating original computationallyexpensive model. Since the initial individuals which are selected toproduce the first set of training data will almost inevitably misscertain features of the landscape, the construction of a useful sur-rogate often requires further evaluated solutions by the realsimulation model (Forrester et al., 2008). The task of how to selectthese additional solutions is called as sampling strategy and theprocess of updating and managing the surrogate model to achievethe desired fidelity level is referred to as control strategy. Fidelity inthis context refers to the degree of meta model's accuracy inemulating the simulation model. Accuracy is measured based onthe errors of meta model responses respect to simulation results.The threshold of fidelity can be fixed by the user or adapted overthe evolution toward the desired Pareto-front. This threshold rep-resents the level of error desired and/or admitted by the user be-tween the exact evaluation and the evaluation provided by themeta model.
The search algorithm (optimization model), surrogate model,sampling and control strategies implemented in this study arediscussed in following.
2.1. Optimization model
Incorporating the multi-objective optimization models(MOOMs) in different disciplines of water resources managementhas prominently prevailed in recent decades owing the existence ofconflict objectives among stakeholders and decision makers. Theconcept of optimal in MOOMs is a set of solutions that representsthe trade-off between objectives, providing more flexibility fordecision making. Formulation of a MOOM with two objectivefunctions can be represented as follows:8<:Min f1
�x�
Min f2�x� (1)
where x is the vector of decision variables and fiðxÞ is the ithobjective function. In flood management application, the objectivefunction f1 and f2 can be assumed as the cost of implementing someflood mitigation measures (Cost) and expected annual flood dam-age (EAD or also called as risk), respectively (Barreto et al., 2010;Yazdi and Salehi Neyshabouri, 2012). In this case, x the vector ofdecision variables (five variables in this study) would be the heightof detention dams that the best values should be determined.Evaluating the EAD objective function however needs employinglinked hydrological and hydrodynamic models to estimate thewater depth of different land uses in flood-prone areas whichtypically have a considerable running time. On the other hand,

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 109
flood rainfalls/flow-rates as inputs of the system are stochasticvariables and thusmanymodel realizations are required to evaluateobjective function (EAD). These two factors lead to high computa-tional demands and prove the necessity of surrogate techniques foroptimal design of flood control systems.
Here, a fast elitism multi-objective genetic algorithm known asNon-dominated Sorting Genetic Algorithm, NSGA-II (developed byDeb et al., 2000) is used for solving the aforementioned optimiza-tion problem. In NSGA-II, the population is initialized as usual.Parents are selected from the population using binary tournamentselection based on the rank and crowding distance. Then, theselected population generates offspring by crossover and mutationoperators. The current population and current offspring is sortedbased on non-domination and only the best N individuals areselected as the new population, where N is the population size. Thisevolutionary process is followed to meet the convergence criterion.More details of this approach can be found in Deb et al. (2000).Here, a real code is used for encoding the chromosomes and alsoSimulated Binary Crossover (SBX) and polynomial mutation areused as the genetic operators.
2.2. Adaptive neural network
A feed-forward multi-layer neural network is used in this studyas the surrogate model. The number of hidden layers and neuronsin each layer along the weights and biases are adaptively changedduring the evolutionary-based optimization process to satisfy thedesired fidelity level. Sigmoid and linear activation functions areused for the hidden layers and output layer, respectively. Theweights and biases of the network are obtained with back propa-gation LevenbergeMarquardt algorithm. After tuning the weightsand testing the network, it can be used for predicting.
Among various meta-modeling techniques, ANNs typically suf-fer more than others from overfitting or overtraining, arising fromthe ‘conformability’ of the model structure with the shape of theavailable data, when inputs are noise-free simulation-based drivendata. Overfitting decreases the generalization ability of ANN anddegrades the fidelity level of approximation model for individualsaway from the training data. Here, the early stopping approach(Beale et al., 2010) is used to avoid overtraining; however morecomputationally expensive procedures like k-fold cross validationand leave-one-out cross validation are also applicable for validationof response surface surrogates such as ANN (Razavi et al., 2012). 70percent of all training data provided by the real simulation modelare randomly chosen for training the ANN and 15 percent areallocated for validation and testing the ANN, respectively. Aftervalidating the network, if the fidelity level is not satisfied, otherarchitectures of ANN will be tested.
In this study, inputs of the ANN are heights of different deten-tion dams and the ANN output is the value of expected benefit.When the ANN is used for calculating the EAD as one of theobjective functions, first the expected benefit is estimated by ANNbased on its input values. Then, EAD(dam combination) is simply esti-mated as: (EADNo option � expected benefit) where EADNo option hasalready been calculated by the real simulation model in the firstgeneration. Instead of EAD, the expected benefit was used as theoutput of ANN, since the results showed that this method providesmore accurate EAD estimations.
2.3. Design of experiment (DoE)
Design of experiment (DoE), or also referred to as samplingstrategies includes special methods to choose the trial infill pointsfrom explanatory variable spaces for training as the trained sur-rogate model can rigorously emulate the real simulation model and
cover sufficiently the search space. Some of the well-known DoEmethods can be enumerated as full factorial sampling, randomsampling, Latin Hypercube Sampling (LHS) and space-filling LatinHypercube techniques (Forrester et al., 2008).
Two strategies are employed in this study to capture a widerspectrum of the search space (decision variable space) as the DoEstrategies in conjunction with the optimization model:
� Generating the initial population in GA based on the LHStechnique;Unlike the normal task of random sampling to initialize thepopulation, this research utilizes the LHS technique to achieve abetter space-filling throughout the design space. This methodhas already been suggested by Knowles (2005) and Kapelanet al. (2005).
� Choosing the special points as the DoE during the evolutionaryprocess in the ANMOGA;After generating the offspring with crossover and mutationoperators, objective functions of all individuals in offspring arefirstly evaluated using the previously trained meta-model andthen the values of decision variables (search space) are clusteredto a predefined number of groups (discussed more in latersections) based on the Euclidian distance. The nearest points tocluster centers are chosen to reevaluate their fitness with theoriginal simulation model. The meta-model (here ANN) is con-structed and trained with all precedent and new space fillingdata and then is utilized to update the fitness of other in-dividuals in the offspring. If the retrained meta-model does notsatisfy the desired fidelity level, the number of clusters inoffspring search space would be increased. This method sys-tematically assures the diversity in the training set data andenhances the generalization ability of meta-model (ANN) whilepreserving the accuracy of approximations during differentgenerations of genetic algorithm.
2.4. Dealing with system uncertainties
There are different methods of uncertainty analysis in theliterature to deal with various sources of uncertainties in the sys-tem involving different levels of mathematical complexity and re-quirements (e.g. Melching, 1995; Gupta et al., 2005; Montanari,2007; Solomatine and Sherestha, 2009). An overview of uncer-tainty in modeling, its application in existing frameworks and adescription of architectures required to support uncertainty man-agement in environmental modeling can be found in the work ofBastin et al. (2013).
Overall, the appropriate method of uncertainty handling de-pends upon the nature of problem at hand including the availabilityof data, model complexity and the accuracy of the results desired.Here, Monte Carlo Simulation (MCS) method is employed topropagate uncertainties of input variables into that of systemoutput. MCSmethod is a flexible and robust method to solve awidevariety of engineering problems. In fact, it may be the only methodthat can estimate the complete probability distribution of themodel output for cases with highly non-linear and or complexsystem relationships (Melching, 1995). This method however suf-fers from two major practical limitations: (i) it is difficult to samplethe uncertain variables from their joint distribution unless thedistribution is well approximated by a multi-dimensional distri-bution (Kuczera and Parent, 1998); and (ii) it is computationallyexpensive for complex models particularly when combined withoptimization models. The latter here is addressed through themeta-modeling approach and LHS technique. The former problemoriginates from the well correlated structure among input

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120110
stochastic variable data (also called as multivariate data). Togenerate multivariate data, computationally expensive methods,such as copula functions which attempt to identify the joint dis-tributions or simpler methods based on the variable space trans-formation, like the Cholesky Factorization Method (CFM) and EigenValues Method (EVM), are available (Yazdi, 2013). The CFM isapplied in this study. This method is based on orthogonal trans-formation. The main idea behind this method is to map correlatedstochastic variables from their original space to a new domain inwhich they become uncorrelated and the analysis can be greatlysimplified. Consider n multivariate stochastic basic variableX ¼ ðx1; x2;…; xnÞt having a mean vector mX ¼ ðm1;m2;…;mnÞt andcovariance matrix CX as:
CX ¼
266664s11 s12 : : s1ns21 s22 : : s2n: : : : :: : : : :
sn1 sn2 : : snn
377775 (2)
where sij is the covariance of and variables obtained from thefollowing relationship:
sij ¼ rij$�sxi$sxj
�(3)
inwhich rxixj is the linear correlation coefficient of and variables. sxiand sxj are also the standard deviation of variables xi and xj,respectively. Since CX is a positive definite matrix, it can bedecomposed to an upper and lower triangular matrix using theCholesky factorization (or Cholesky decomposition) method asbelow:
CX ¼ LLT (4)
where L is the lower triangular matrix and LT, its transpose, is theupper triangular matrix.
An n � n square matrix T, is used to transform the correlatedstochastic variables X into a set of uncorrelated stochastic variablesY as:
Y ¼ TX (5)
It is conveniently proved that if T matrix is considered asT ¼ Lt=diagðLÞ, then the new variable set Y, would be uncorrelated.Therefore, adequate data are produced and finally the generateddata are transformed to the main space by adverse matrix trans-formation, again as: X ¼ T�1Y .
2.5. ANMOGA algorithm
As mentioned, here the process of updating the meta model isbased on monitoring the errors of function approximations andmodifying themetamodel as long as a desired accuracy is achieved.However, in the majority of previous works (such as Nain and Deb,2002; Yan and Minsker, 2006; Behzadian et al., 2009; etc.) justperiodically updating the weights of neural network by newtraining data is considered as the main strategy of meta modelingwithout explicitly controlling the errors of meta modeling. The onlyresearch found in the literature that considered the level of errorsin updating and employing the meta model for function evaluationwas the research carried out by Gaspar-Cunha and Vieira (2005). Incomparison with that research, the work described here suggeststwo more important strategies that make this work superior theformer in terms of computational efforts needed to reach accuracylevel. These two strategies are 1) updating not only weights but alsoarchitecture of the neural network and 2) selecting only a few
numbers of chromosomes by clustering for exact evaluation insteadof considering a large number of individuals (see introductionsection). The performance of these strategies and previous ap-proaches are comparedwith each other using some benchmark testfunctions in Section 6.
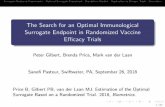
Themain steps of the proposed algorithm are illustrated in Fig.1.First the initial population is generated using Latin HypercubeSampling technique to explore efficiently the decision variablespace. To provide the data set for training the ANN, firstly objectivefunctions are completely evaluated by the real simulationmodel forinitial population and a few early generations. For flood manage-ment application as described, the second objective function, i.e.EAD have to be evaluated with real simulation model. This simu-lation includes coupled hydrological and hydraulic modeling whichis called “dual modeling” in this study. EAD is evaluated by dualmodeling for many generated multivariate rainfall samples. Thesesample sets are randomly generated from the PDFs of rainfall sto-chastic variables by Cholesky Factorization Method (CFM) and LHStechnique. After yields water depth for all land uses in flood proneareas for each rainfall data set, flood damage is calculated usingdamageeelevation curves. EAD is the expected value of evaluateddamages from sufficient rainfall sample sets. It is worthmentioningthat in each stage of the algorithm that objective functions shouldbe evaluated, archiving cache is firstly checked to improve theperformance of the model. Archiving cache indeed stores thechromosomes and their objective functions that have been previ-ously evaluated with real simulation model. When the samechromosomes reappear in the population, the true objective func-tion can be evoked from the cache without evaluating with theapproximating model (ANN) or redundant simulation withcomputationally expensive dual modeling. Archiving cache hasbeen successfully utilizedwith Yan andMinsker (2006) in a discretedecision space problem. Here the success of the procedure is testedfor real-coded GA with continuous variables. Archiving cache isupdated continuously during the search process when the objec-tive function is evaluated with real simulation model. After pre-paring the adequate data with real simulation model, an ANN istrained and utilized for function evaluation of the individuals in thecurrent offspring. The decision variable values of the offspring isthen clustered to a certain number of groups (e.g. 0.2 of populationsize) and the nearest points to the cluster centers of each group areselected to calculate their fitness values with real simulationmodel.The new provided data are used to update the neural network. Firstall provided data including precedent and new data is shuffled.Then, the fist 70% of data is taken for training, next 15% for vali-dation and last 15% for testing the neural network. Now the suitablearchitecture must be determined. Different architectures arechecked, but during consideration of different architectures, thearrangement of training, validation, and testing data are notchanged. Furthermore, training all architectures is started with thesame initial weights and biases. The candidate architecture is firstconstructed by only one hidden layer and the network is allowed toincrementally increase numbers of its neurons in a suitable range.This range depends on the size of available data for training andhere 5e20 neurons are considered for it. As already mentioned, foravoiding overfitting of each architecture, early stopping approach isapplied. In this method, training data set is used for computing thegradient and updating the network weights and biases. The erroron the validation set is monitored during the training process. Thevalidation error normally decreases during the initial phase oftraining, as does the training set error. However, when the networkbegins to overfit the data, the error on the validation set typicallybegins to rise. When the validation error increases for a specifiednumber of iterations (6 iterations is used here), the trainingis stopped, and the weights and biases at the minimum of the

Fig. 1. Noisy ANMOGA optimization framework.
J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 111
validation error are returned. The test set error is not used duringtraining, but it is used to verify the generalization ability of ANNmodel after training. After stopping the training process, errors ofthe network including (trainþ validation) data set and test data setare checked. If errors are below the pre-defined threshold, thenetwork (with one-hidden layer and current numbers of neurons)is used for function evaluation. Otherwise, one neuron is added tothe hidden layer and training process is started again with this newarchitecture. If different one-hidden-layer architectures do notsatisfy desired accuracy, more complex architectures are checkedwith two hidden layers and variable sizes between 5 and 20 neu-rons. If still desired accuracy is not satisfied, new training datawill be provided by real simulation model (selected by clustering
method) and the above process is repeated to reach the fidelitylevel.
After updating the neural network and obtaining desired accu-racy for the network, remaining individuals in offspring that havenot been the nearest points to the cluster centers reevaluated withthe updated ANN. Next, the current parents and offspring aremixedinto a single population and sorted based on non-domination. Thebest individuals are then selected as the new population. Thisevolutionary search process continues until a certain convergencecriterion is met.
For the case study here, the selected architecture in all trainingperiods was obtained as a one- hidden-layer network in whichthe number of neurons was variable based on error criteria.

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120112
Experimental results showed that the errors of validation dataavoid from selecting two-layer architectures that have overfittingproblems.
3. Application
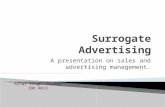
Here, the proposed algorithm is tested and verified for optimaldesign of flood control multi-detention dams on Kan watershed incentral part of Iran as a real world case study. This case study is amountain area with steep rivers and short time concentration. Kanwatershed with ten sub-basins (Fig. 2) is one of the main recrea-tional centers of people in the capital city, Tehran. Land uses inriversides of the watershed are predominantly restaurants, recre-ational villas and fruit gardens. Improving the safety level of theflood-prone areas to protect peoples and properties against thesevere floods are seriously felt considering the previous devastating
Fig. 2. The study area
floods and much population which visit the area for recreation andreligious purposes (WRI, 2011). Among different flood control al-ternatives, detention dams are strongly suggested for small steepwatersheds with multiple tributaries when downstream flood-plains are heavily developed (Green et al., 2000). Kan watershedmeets consistently these characteristics, and so detention damsmay have potentially significant role in flood mitigation. Detentiondams, by storing part of the flood volume, reduce the flood peaksand mitigate the potential damages. In contrast of multi-purposelarge reservoirs, detention dams, with smaller heights, are justconstructed for flood mitigation. They are kept empty during noflood periods while they only pass the base flow of rivers. Opti-mization of height and location of multiple detention dams is ofgreat importance. A poor design not only may not mitigate theflood peaks and damages, but it may also intensify the conse-quential flood damages by synchronizing the flood peaks and
and main rivers.

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 113
volumes at downstream reaches. A simulation based optimizationapproach is required to identify heights and optimal locations ofdams for minimizing expected annual damages (or also referred toas EAD). The construction cost level, however may not be sufficientto minimize the EAD.
The optimal designs can then be identified by compromisingbetween EAD and construction cost. Hence, Eq. (1) can be rewrittenas:
Min/f1 ¼Xml¼1
Costl ¼Xml¼1
hCostkl ¼ f
�Hkl
�i(6)
Min/f2 ¼ EAD ¼Xsq¼1
pq
Xml¼1
Damagel
!
¼Xsq¼1
pq
0@Xml¼1
Xtj¼1
Xni¼1
cl;j;i�yl;i�1A
where m is the number of reaches; Costl is total cost of detentiondams in reach l, Hk
l and Costkl are height and costs of constructingdam k in reach l, respectively. EAD is the expected annual flooddamage, Damagel is flood damage by the probability of pq in reach lif a set of detention dams is considered. Unit of all costs is US$; t andn are the number of land uses and spatial discretization in reach l,respectively; yl;i is water depth in ith location in reach l and cl;j;i isflood damage of land use j in location i for reach l. cl;j;i is a functionof yl;i (damageeelevation curves). yl;i is calculated implicitly fromsolving the partial differential Saint-Venant equations by hydro-dynamic model.
Constraints of the optimization model include the height limi-tations of detention dams and their structural stability criteria,represented in Eq. (7). In this equation, ðHk
l Þmin and ðHkl Þmax are
minimum and maximum permissible heights of dam k in reach l.ðMk
l ÞR and ðMkl ÞD are resistant and overturning moment of dam k
while ðFkl ÞR and ðFkl ÞD indicate resistant and sliding forces of dam kin reach l, respectively. S:FM and S:FF are safety factors for over-turning and sliding of the structures.
�HDl;k
�min
� HDl;k �
�HDl;k
�max�
MDl;k
�R�
MDl;k
�D
� S:FM;
�FDl;k�R�
FDl;k�D
� S:FF(7)
The suitable layout of dams in different tributaries (indicated inFig. 2) and their height limitations were assigned based on theother studies regarding social and regional restrictions (WRI, 2011).The permissible heights are [10, 30] meters for detention dams inSB1, SB3 and SB4 sub-basins and [20, 40] meters for detention damsin SB5 and SB6.
Table 1Residual criteria for the results of model calibrations, where n is the number of observat
Criteria Formula Qp (m3/s) T
Mean Relative Absolute Error (MRAE) 1nPn
i¼1jyi�byi jbyi
0.04 0Mean Absolute Error (MAE) 1
nPn
i¼1jyi � byij 0.312 0
Absolute Maximum Error (AME) maxjyi � byij 0.86 1Root Mean Square Error (RMSE)
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1nPn
i¼1ðyi � byiÞ2q0.42 0
NasheSutcliffe Coefficient (E)1�
Pn
i¼1ðbyi�yiÞ2Pn
i¼1ðbyi�byiÞ2
0.999 0
4. Model evaluations
In order to use environmental models effectively for manage-ment and decision-making, it is vital to establish an appropriatelevel of confidence in their performance (Bennett et al., 2013).Accordingly, available observed data of recorded flood events in thestudy areawas used to validate simulationmodels and several well-known benchmark problems were selected from the literature toevaluate the performance of optimization model which are illus-trated in the following sub-sections.
4.1. Simulation models
Simulation models include linked hydrological and hydraulicmodels which are applied for rainfall-runoff modeling and floodrouting, respectively. The performance of hydrological model wasevaluated based on the accuracy of flood peak discharges (Qp), timeto peak and flood volumes estimated and hydraulic model wasassessed according to comparison of the calculated and observedflooding water depths since damage analysis is based on theseestimations. For this purpose, observed data sets including rainfalland discharges in monitoring gauges of the study area (Fig. 2) weredivided into two independent subsets, namely the calibration andvalidation subsets. The calibration sets were used to adjust theparameters of hydrological and hydraulic models and the validationsets were used to verify the calibrated models, before applying intothe optimization routines. The results of calibration and validationaccording to some residual metrics are shown in Tables 1 and 2,respectively. All metrics have an ideal value equal to zero except thelast metric which the ideal value is one. According to the residualerrors, it is obvious that both models have suitable performance inflood modeling and thus can be applied for the next steps of theproposed methodology.
4.2. Optimization model
In multi-objective evolutionary computations, researchers haveused many different benchmark problems with known sets ofPareto-optimal solutions. Here, several well-known test functionswere taken from the specialized literature to evaluate the results ofNSGA-II algorithm. The considered test functions are FON (Fonseca,1995), KUR (Kursawe, 1991), ZDT1 and ZDT2 (Zitzler et al., 2000)multi-objective test problems. The objective functions and theirconstraints for these benchmarks are represented in Table 3. Fig. 3shows the graphical results produced by NSGA-II algorithm for testfunctions chosen. The global Pareto front of the problems is shownas a continuous line. As can be observed, NSGA-II algorithm givesthe true Pareto in comparison with global optimal solutions.
5. Experimental setup
In flood frequency analysis, annual maximum rainfalls areextracted from historical time series, recorded by the rainfall
ions, yi and byi are simulated and observed data.
ime to peak (hr) Flooding volume (MCM) Maximum water depth (m)
.04 0.09 0.01
.8 0.04 0.02
0.14 0.06.89 0.065 0.03
.997 0.991 1.000

Table 2Residual criteria for the results of model validation.
Criteria Qp (m3/s) Time to peak (h) Flooding volume(MCM)
Maximum waterdepth (m)
MRAE 0.04 0.02 0.06 0.01MAE 1.17 0.67 0.068 0.02AME 2.1 1 0.09 0.02RMSE 1.35 0.82 0.071 0.02E 0.989 1.000 0.996 1.000
J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120114
gauges, and are used for deriving PDFs of extreme rainfalls. ThesePDFs then can be used in MCS. It should be noticed for a certainyear, the maximum rainfall of different gauges may arise fromdifferent events, but just one event should be selected and allocatedto all gauges as the annual maximum. Otherwise, the obtainedcorrelation coefficients among rainfall gauges are meaningless. Inthis study, a certain event was considered as the annual maximumthat sum of its rainfall amount in all three gauges was maximum.The calculated correlations in this method represent the trueevent-based correlations and can be used to construct the covari-ance matrix of maximum annual rainfalls.
After establishing the covariance matrix, CFM was used togenerate multivariate rainfalls based on the Monte Carlo Simula-tion (MCS) method. To evaluate EAD, HEC-HMS model as therainfall-runoff model and MIKE-11 model as the hydrodynamicmodel were adopted and used together. The main tributariessimulated with MIKE-11 model and the location of input floodhydrographs (red arrows) are depicted in Fig. 2. As shown sche-matically in the excerpt box, flood hydrographs in each sub-basinwould not be deterministic and they have their own PDF duringthe Monte Carlo Experiments while their correlations are kept withadjacent sub-basins following the described method in previoussections.
A sensitivity analysis was conducted to determine adequatenumber of rainfall samples in MCS. Based on this sensitivityexperiment, the number of 200 and 100 samples was recognizedsufficient tomeet the convergence, by accepting a tolerance error of5% and 7% respectively. The convergence is met when the statisticalproperties of the system output (i.e. mean and variance of EAD)tend to a constant value. The number of 100 rainfall sample setswas eventually deemed adequate for MCS in optimization frame-work to reduce the significant computational time.
Table 3Multi-objective evolutionary algorithm (MOEA) suite test functions.
MOP Definition
FONFonseca (1995)
F ¼ ðf1ðxÞ; f2ðxÞÞ; where
f1ð x!Þ ¼ 1� exp
�Pn
i¼1
�xi �
f2ð x!Þ ¼ 1� exp
�Pn
i¼1
�xi þ
KURKursawe (1991)
F ¼ ðf1ðxÞ; f2ðxÞÞ; where
f1ð x!Þ ¼Pn�1i¼1 ð�10eð�0:2Þ*
ffiffiffix2i
pf2ð x!Þ ¼Pn
i¼1ðjxija þ 5 sinðxiÞbZDT2Zitzler et al. (2000)
f1ðx1Þ ¼ x1;
gðx2;…; xnÞ ¼ 1þ 9n� 1
Xni¼2
xi
f2ðx2;…; xnÞ ¼ g$ð1� ðf1=gÞ2ÞZDT3Zitzler et al. (2000)
f1ðx1Þ ¼ x1;
gðx2;…; xnÞ ¼ 1þ 9n� 1
Xni¼2
xi
f2ðx2;…; xnÞ ¼ g$ð1�ffiffiffiffiffiffiffiffiffif1=g
q�
The genetic algorithm for the study area was set using a popu-lation size of 40 individuals and running for a maximum 20 gen-erations where the search algorithm is converged. To ensure theconvergence of the NSGA-II algorithm, a criterion proposed byRudenko and Schoenauer (2004) was used. Based on this criterion,sL should be less than dlim where sL is obtained as:
sL ¼ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi1n
XLl¼1
�dl � dL
�2vuut < dlim (8)
where sL is the convergence criterion; L is the total consideredgenerations, dl is the maximum distance of solutions from eachother in lth generation; and dL is the average of maximum distancesover the entire generations. To calculate dl, first the average dis-tance of each solution from other solutions considering differentobjectives is determined. Then, the maximum distance of solutionsin each generation from each other is considered as dl. dlim is theoptimization termination threshold, which is determined by theuser. In this study, the value of 0.02 is considered for dlim based onRudenko and Schoenauer (2004).
The crossover probability was set to 0.9 and the mutationprobability was chosen 1/n where n is the population size. Thesimulated binary crossover (SBX) index, hc and polynomial muta-tion index, hm (Deb et al., 2000) were set to 0.5 and 20, respectively.hc determines how well spread the children will be from theirparents. A smaller hc leads to different values between offspringand their parents and gives a larger search space. In contrast, if alarger hc is used, NSGA-II may converge very quickly. Therefore,even though the convergence rate would be slow, a small distri-bution index of 0.5 is considered for hc to obtain a better diversity inthe population and to avoid local optima.
The second objective function in optimization problem wasapproximately evaluated 368 times with real simulation model andfor each function evaluation; the number of 100 dual-model re-alizations were executed. The algorithm was coded in Matlabenvironment and its runtime on an Intel Core 2 Quad 2.4 GHz with4 GB RAM was obtained nearly 43 h.
6. Results and discussion
Before applying the proposed algorithm for the study area,several experimental tests were carried out to justify superiority of
Constraints
1ffiffiffin
p�2!;
1ffiffiffin
p�2!
�4 � xi � 4; i ¼ 1; 2; 3
ffiffiffiffiffiffiffiffiffiffiþx2iþ1 Þ;Þ
�5 � xi � 5; i ¼ 1; 2; 3a ¼ 0:8;b ¼ 3
;
0 � xi � 1; i ¼ 1;2;…; 30q ¼ 4;a ¼ 2
;
ðf1=gÞsinð10pf1ÞÞ
0 � xi � 1; i ¼ 1;2;…; 30

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 115
developed adaptive meta model compared to the previous ap-proaches. To do this, suite test functions in Table 3 are solved bydeveloping adaptive ANNs in two different methods. In the firstmethod, after five generations of performing NSGA-II with exactevaluations, a fixed suitable architecture was trained in the sixthgeneration and for the next generations, 10% of population size wasevaluated by the exact model which they were then used forupdating the weights and biases of pre-defined architecture. Thismethod is similar to the previous researches (e.g. Nain and Deb,2002; Gaspar-Cunha and Vieira, 2005; Knowles, 2005; Yan andMinsker, 2006, etc.). Furthermore, similar to the work of Yan andMinsker (2006), a random sampling approach was used forproviding training data during the search progress. In the secondmethod, as demonstrated in this study, instead of a fixed archi-tecture, the structure of the network is also updated duringdifferent generations and new training data (10% of populationsize) is selected based on clustering of the solutions in decisionvariable space. The first generation in both approaches is initializedwith the same population, generated by LHS technique. Optimiza-tion problems were solved 10 different times with two approachesand errors of the network were monitored. Fig. 4 depicts the trendsof absolute errors for (training þ validation) and test data sets.Different behaviors can be seen for the considered test functionswhere FON and KUR functions show a decreasing trend of errorsduring search progress while ZDT1 errors fluctuate and those ofZDT2 show a slightly increasing orientation. The noticeable point isthat in all test functions, the errors of meta modeling in the pro-posed approach is considerably lower than errors of ANN with apre-defined architecture when only weights of the network areupdated by new training data randomly generated. This means thatif a desired fidelity level is defined, noticeably less effort in terms ofthe number of exact function evaluation is needed to satisfy fidelitylevel and thus a great computational time saving will be achieved.These results confirm the superiority of proposed adaptive metamodeling respect to previous works.
Before ANN is used in the algorithm developed, a simplermultiple linear regression model was tested for function
Fig. 3. Pareto fronts produced by NSGA-II for the a) F
approximation. But obtained results showed that errors of linearmodel are very high (nearly 40% in average) probably because ofthe nonlinearity of detention dam performances and complexity oftheir interaction with each other.
After verification of the proposed method by benchmark tests,ANMOGA was performed for the real case study. Fig. 5 shows thegraphical results of ANMOGA for some typical generations. In orderto evaluate the quality of the computational results and the per-formance of proposed approach, objective functions of the solu-tions found by ANMOGA is also evaluated by simulation model andshowed in Fig. 5. Furthermore, the Pareto front obtained by onlysimulation model is also indicated in this figure. As can beobserved, the results of the simulation model verify the results ofthe presented methodology whereas the maximum error betweenthe ANMOGA and simulation-based results was obtained at most4.8% for the last generation.
To analyze the identified solutions, five optimal designs (Fig. 6)have been chosen based on distance clustering and represented inTable 4.
By looking at Table 4, it can be seen some detention dams havethe height of zero (e.g. see Design No. 1 or 2). This means for eachcost level, the algorithm identifies both optimum location andheight of dam (or dams) among different alternatives on the searchspace. The effects of selected optimal designs on reducing the peakof floods has been shown on the last column of Table 4 for a typicalpoint at the outlet of SB6 sub-basin (see Fig. 2). As can be seen,optimal designs have efficiently decreased the flood peaks inheavily developed downstream reach between 18% and 95%depending on the chosen design and cost level. There is acompromise between cost and expected peak flood reduction (orexpected flood damage) to choose the final optimal design. It isworth mentioning detention dam in SB5 sub-basin has appearedtoo little in Pareto solutions (4 solutions among 40) implying itslower efficiency than other plans specially detention dams in SB3and SB4with higher density in Pareto solutions. Fig. 7 illustrates theconfidence intervals of calculated damages for the selected optimaldesigns and for the case of ‘no option’ scenario (the first column). It
ON, b) KUR, c) ZDT1 and d) ZDT2 test functions.

Fig. 4. Comparing the performance of proposed adaptive meta modeling approach with previous methods, left side: errors of (training þ validation) data, right side: errors of testdata, a) FON, b) KUR, c) ZDT1, d) ZDT2 test functions.
J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120116
is clearly observed that there is a large variability for the calculateddamages which is likely attributed to high temporal and spatialvariability of rainfalls inducing floods in Kan watershed (e.g. seeTable 1 in the work of Yazdi et al., 2013). The range of variabilityhowever decreases by implementing detention dams and moreexpensive designs (more dams) have narrower confidence limits.This information provides valuable insights to decision makersabout the robustness of different optimal designs and the degree ofreliability of the estimated benefits or damages.
The final design can be chosen among the wide variety of ob-tained solutions by decision makers and stakeholders consideringvarious decision criteria including expected benefits, degree ofreliability, cost level as well as the environmental and social aspectsof different designs.
Fig. 8 shows the parents, generated offspring and the selectedindividuals of a typical generation for DoE in criteria space. As
mentioned, individuals are chosen based on the clustering of thesolutions in decision variable space and selecting the nearest so-lution to the center of each group. This strategy provides a betterspace filling and enhances the ‘generalization ability’ of surrogatemodel to attain higher fidelity level as the evolutionary searchprogresses. Other control strategies like selecting the best solutionsor random sampling may lead to local optima or even failure so-lutions arising from low fidelity surrogates. Here in, the numberof solutions for space filling (number of clusters) is initiallyassumed as 0.1 of population size and if the threshold accuracylevel is not satisfied during the optimization, this number increasessubsequently.
Fig. 9 plots the average of absolute errors for testing data andtotal data (training data, validation data and testing data) alongdifferent generations of genetic algorithm. The threshold accuracylevel was considered as five percent error for the average absolute

Fig. 5. The performance of ANMOGA compared to simulation model in some typical generations.
J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 117
errors in total data and test data (5% error is accepted for estimating“expected benefits” of detention dams). More restricting value forthis threshold, although provides better quality for the solutions; itinversely increases the computational time. Therefore, admitting5% error is subjectively preferred to increasing the computationalcosts of additional simulations in this study. If the computationalerrors violate this level, the architecture of neural network isadaptivelymodified (with increasing the number of neurons from 5to 20 in the hidden layer and subsequently the number of hiddenlayers from 1 to 2). If the new architectures still would not reducethe errors below the threshold, more space filling solutions (byincreasing the number of clusters) are incrementally provided withreal simulation model as the new training data set.
As shown in Fig. 9, with employing these sampling and controlstrategies, the computational errors have been kept below thethreshold during different generations of genetic algorithm.Furthermore, the average error of total data have generally a
Fig. 6. Pareto front solutions found by ANMOGA.
decreasing trend as the evolutionary-based optimization pro-gresses which may be attributed to enhancing the generalizationability of neural network as more data uniformly provided from thesearch space.
Fig. 10 shows the proportion of different kinds of evaluations ineach generation of genetic algorithm. In initial population and firstthree generations, all objective functions are evaluated with realsimulation model to provide ANN training data. After that, if the so-lutions are included within the archiving cache their objectivefunctions are called; otherwise they are evaluated selectively bySimulationmodelorneuralnetwork. Ignoringfirst threegenerations,almost 10% and 18% of solutions are respectively evaluated by simu-lationmodel and archiving cachewhile ANN has the highest portionof function evaluation, nearly 72% of individuals. To enhance the ef-ficiency of caching, decision variables in chromosomes are roundedto one decimal during the evolutionary process. The results provethat archiving cache may also efficiently be utilized in continuousdecision variable problems like discrete decision problems (pre-sented in the work of Yan and Minsker, 2006) to decrease largecomputational budgets of implementing the real simulation model.
Eventually, the time information represented in Table 5 showsthat the ANMOGA is computationally efficient. Although the
Table 4Selected optimal designs of detention dams after clustering the Pareto front.
Opt.designNo.
Cost(1000$/year)
Damage(1000$/year)
HSB1
(m)HSB3
(m)HSB4
(m)HSB5
(m)HSB6
(m)Expected valueof peak reductionin target pointa (%)
(1) 34 2068 10.2 0 0 0 0 0.18(2) 264 1882 11 14.3 18.4 0 0 0.31(3) 782 1684 11 11.8 0 0 27.9 0.33(4) 1674 1615 30 20.7 10.9 20.1 29.3 0.84(5) 2626 1605 23.3 21.8 10.6 24.7 40 0.94
a Target point is assumed on downstream reach at the outlet of SB6 sub-basin(Fig. 2).

Fig. 8. A typical offspring and selected individual for DoE based on clustering.
Fig. 7. Confidence interval of the selected optimal designs. Fig. 10. Proportion of different types of fitness evaluation.
Table 5Comparison of computational times.
Model No. of model realizations Runtime (h) Saving time (%)
Simulation-MOGA 84,000 164 e
ANMOGA 22,200 43 74
J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120118
proposed approach leads to a 74% saving time, this amount risestoward around 90% (Fig. 10) as the number of generations increaseand the effect of initial generations degrades.
7. Conclusion
Developing efficient and accurate surrogate models is of greatimportance for solving the real world optimization problems withlarge computational burden. In this paper an adaptive meta-modeling approach called as ANMOGA is represented for multi
Fig. 9. The average of absolute errors in ANN during optimization process.
objective optimization problems with stochastic variables. ANN isserved as the surrogate model and adaptively updated in eachgeneration of genetic algorithm to satisfy the threshold fidelitylevel for function evaluation. The desired fidelity levels achievewith modification of ANN architecture as well as incrementallychoosing well-spread space filling solutions based on clustering theindividuals in the search space for exact evaluation. Furthermore,an archiving cache is employed to retrieve fitness values of dupli-cate chromosomes and to improve the GA's performance. Resultsobtained from applying the method to the several benchmarkfunctions confirm the superiority of proposed adaptive metamodeling in terms of both efficiency and accuracy respect to pre-vious works. The proposed ANMOGA algorithmwas also tested on aflood control system design problem with large computationalbudget. The computational results show the selectively functionevaluation approach with original MIKE-11 simulation model andupdated ANN as well as incorporating archiving cache leads to asubstantial decrease in computational costs (70e90%) for the casestudy while the accuracy of results is kept on the desired level.Obtained results also showed the archiving cache can be efficientlyemployed for continuous variable problems as for the case studynearly 18% of objective functions were evaluated through differentgenerations of GA. Though these results are conjunction with thecase study here and the amount of achievements is indeed acompromise between efficiency and accuracy, the promising pro-posed sampling and control strategies for updating themeta-modelcan be tested and verified for other applications.
References
Afshar, A., Kazemi, H., Saadatpour, M., 2011. Particle swarm optimization for auto-matic calibration of large scale water quality model (CE-QUAL-W2): applicationto Karkheh Reservoir, Iran. J. Water Resour. Manag. 25, 2613e2632.
Ahmad, S.S., Simonovic, S.P., 2011. A three-dimensional fuzzy methodology for floodrisk analysis. J. Flood Risk Manag. 4 (1), 53e74.
Barreto, W., Vojinovic, Z., Price, R.K., Solomatine, D.P., 2010. A multi-objectiveevolutionary approach to rehabilitation of urban drainage systems. ASCE J.Water Resour. Plan. Manag. 136 (5), 547e554.
Bastin, L., Cornford, D., Jones, R., Heuvelink, G.B.M., Pebesma, E., Stasch, C., Nativi, S.,Mazzetti, P., Williams, M., 2013. Managing uncertainty in integrated

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120 119
environmental modelling: the UncertWeb framework. Environ. Model. Softw.39, 116e134.
Bayat, B., 2011. Optimal Short Term Multireservoir Systems Operation Model underFlooding Conditions. PhD dissertation. Amirkabir University of Technology(Tehran Polytechnic), Iran.
Beale, M.H., Hagan, M.T., Demuth, H.B., . Neural Network ToolboxTM 7 e User'sGuide. Available at: www.mathworks.com/help/pdf_doc/nnet/nnet.pdf. Math-Works, Natick, Mass.
Behzadian, K., Kapelan, Z., Savic, D., Ardeshir, A., 2009. Stochastic sampling designusing a multi-objective genetic algorithm and adaptive neural networks. En-viron. Model. Softw. 24 (4), 530e541.
Bennett, N.D., Croke, B.F.W., Guariso, G., Guillaume, J.H.A., Hamilton, S.H.,Jakeman, A.J., Marsili-Libelli, S., Newham, L.T.H., Norton, J.P., Perrin, C.,Pierce, S.A., Robson, B., Seppelt, R., Voinov, A.A., Fath, B.D., Andreassian, V., 2013.Characterising performance of environmental models. Environ. Model. Softw.40, 1e20.
Bi, W., Dandy, G.C., 2014. Optimization of water distribution systems using onlineretrained metamodels. J. Water Resour. Plan. Manag. http://dx.doi.org/10.1061/(ASCE)WR.1943-5452.0000419.
Bliznyuk, N., Ruppert, D., Shoemaker, C., Regis, R., Wild, S., Mugunthan, P., 2008.Bayesian calibration and uncertainty analysis for computationally expensivemodels using optimization and radial basis function approximation. J. Comput.Graph. Stat. 17 (2), 270e294.
Broad, D.R., Dandy, G.C., Maier, H.R., 2005. Water distribution system optimizationusing metamodels. J. Water Resour. Plan. Manag. 131 (3), 172e180.
Broad, D.R., Maier, H.R., Dandy, G.C., 2010. Optimal operation of complex waterdistribution systems using metamodels. J. Water Resour. Plan. Manag. 136 (4),433e443.
Castelletti, A., Galelli, S., Restelli, M., Soncini-Sessa, R., 2012. Data-driven dynamicemulation modelling for the optimal management of environmental systems.Environ. Model. Softw. 34, 30e43.
Castro-Gama, M.E., Popescu, I., Li, S., Mynett, A., van Dam, A., 2014. Flood inferencesimulation using surrogate modelling for the Yellow River multiple reservoirsystem. Environ. Model. Softw. 55, 250e265.
Dawson, R.J., Speight, L., Hall, J.W., Djordjevic, S., Savic, D., Leandro, J., 2008. Attri-bution of flood risk in urban areas. J. Hydroinform. 10 (4), 275e288.
Deb, K., Agrawal, S., Pratap, A., Meyarivan, T., 2000. A fast elitist non-dominatedsorting genetic algorithm for multi-objective optimization: NSGA-II, KANGAL-Rep. No. 200001.
Delelegn, S.W., Pathirana, A., Gersonius, B., Adeogun, A.G., Vairavamoorthy, K., 2011.Multi-objective optimisation of costebenefit of urban flood management usinga 1D2D coupled model. J. Water Sci. Technol. 63 (5), 1053e1059.
Fonseca, C.M., 1995. Multiobjective Genetic Algorithms with Applications to ControlEngineering Problems (PhD thesis). Department of Automatic Control andSystems Engineering, University of Sheffield, Sheffield, UK.
Forrester, A.I.J., Sobester, A., Keane, A.J., September 2008. Engineering Design viaSurrogate Modelling, A Practical Guide. John Wiley and Sons, Ltd., Publication.
Fu, G., Kapelan, Z., Reed, P., 2012. Reducing the complexity of multiobjective waterdistribution system optimization through global sensitivity analysis. J. WaterResour. Plan. Manag. 138 (3), 196e207.
Gaspar-Cunha, A., Vieira, A., 2005. A multi-objective evolutionary algorithm usingneural networks to approximate fitness evaluations. Int. J. Comput. Syst. Signal.6 (1), 18e36.
Giustolisi, O., Laucelli, D., Berardi, L., Savic, D.A., 2012. Computationally efficientmodeling method for large water network analysis. J. Hydraul. Eng. 138 (4),313e326.
Green, C.H., Parker, D.J., Tunstall, S.M., June 2000. Assessment of Flood Control andManagement Options. World Commission on Dams, Flood Hazard ResearchCentre, 19. Middlesex University.
Guidolin, M., Kapelan, Z., Savic, D., 2012. Using high performance techniques toaccelerate demand driven hydraulic solvers. J. Hydroinform. 15 (1), 38e54.
Gupta, H.V., Beven, K.J., Wagener, T., 2005. Model calibration and uncertaintyestimation. In: Andersen, M. (Ed.), Encyclopedia of Hydrological Sciences. JohnWiley & Sons, New York, NY, USA, pp. 2015e2031.
Johnson, V.M., Rogers, L.L., 2000. Accuracy of neural network approximations insimulation-optimization. J. Water Resour. Plan. Manag. 126 (2), 48e56.
Kapelan, Z.S., Savic, D.A., Walters, G.A., 2005. Multiobjective design of water dis-tribution systems under uncertainty. Water Resour. Res. 41, W11407. http://dx.doi.org/10.1029/2004WR003787.
Kerachian, R., Karamouz, M., 2007. A stochastic conflict resolution model for waterquality management in reservoir-river systems. J. Adv. Water Resour. 30,866e882.
Khu, S.T., Werner, M.G.F., 2003. Reduction of Monte-Carlo simulation runs for un-certainty estimation in hydrological modelling. Hydrol. Earth Syst. Sci. 7 (5),680e692.
Khu, S.T., Savic, D., Liu, Y., Madsen, H., 2004. A fast evolutionary-based meta-modelling approach for the calibration of a rainfall-runoff model. In: The FirstBiennial Meeting of the International Environmental Modelling and SoftwareSociety, pp. 147e152 (Osnabruck, Germany).
Knowles, J., 2005. PAREGO: a hybrid algorithm with on-line landscape approxi-mation for expensive multiobjective optimization problems. IEEE Trans. Evol.Comput. 10 (1), 50e66 (2006).
Kourakos, G., Mantoglou, A., 2009. Pumping optimization of coastal aquifers basedon evolutionary algorithms and surrogate modular neural network models.Adv. Water Resour. 32, 507e521.
Kuczera, G., Parent, E., 1998. Monte Carlo assessment of parameter uncertainty inconceptual catchment models: the Metropolis algorithm. J. Hydrol. 211, 69e85.
Kursawe, F., 1991. A variant of evolution strategies for vector optimization. In:Schwefel, H.-P., Manner, R. (Eds.), Parallel Problem Solving from Nature. 1stWorkshop, PPSN I, 193e197, Dortmund, Germany, Springer-Verlag, LectureNotes in Computer Science No. 496.
Leandro, J., Djordjevic
, S., Chen, A.S., Savi�c, D.A., Stani�c, M., 2011. Calibration of a 1D/1D urban flood model using 1D/2D model results in the absence of field data.Water Sci. Technol. 64 (5), 1016.
Leandro, J., Chen, A.S., Djordjevi�c, S., Savi�c, D.A., 2009. Comparison of 1D/1D and 1D/2D coupled sewer/surface hydraulic models for urban flood simulation. ASCE J.Hydraul. Eng. 135 (6), 495e504.
Liong, S.Y., Khu, S.T., Chan, W.T., 2001. Derivation of Pareto front with geneticalgorithm and neural network. J. Hydrol. Eng. 6 (1), 52e61.
Melching, C.S., 1995. Reliability estimation. In: Singh, V.P. (Ed.), Computer Models ofWatershed Hydrology. Water Resources Publications, Highlands Ranch, CO,USA, pp. 69e118.
Montanari, A., 2007. What do we mean by uncertainty? The need for a consistentwording about uncertainty assessment in hydrology. Hydrol. Process. 21 (6),841e845.
Mousavi, S.J., Shourian, M., 2010. Adaptive sequentially space filling metamodelingapplied in optimal water quantity allocation at basin scale. Water Resour. Res.46, W03520. http://dx.doi.org/10.1029/2008WR007076.
Mugunthan, P., Shoemaker, C.A., Regis, R.G., 2005. Comparison of functionapproximation, heuristic, and derivative-based methods for automatic cali-bration of computationally expensive groundwater bioremediation models.Water Resour. Res. 41, W11427. http://dx.doi.org/10.1029/2005WR004134.
Mujmadar, P.P., Vemula, R.S., 2004. Fuzzy waste load allocation model; simulation-optimization approach. J. Comput. Civ. Eng. 18 (2), 120se131s.
Murty, Y.S.R., Murty, B.S., Srinivasan, K., 2006. Non-uniform flow effect on optimalwaste load allocation in rivers. Water Resour. Manag. 20 (4), 509e530.
Nain, P.K.S., Deb, K., 2002. A Computationally Effective Multi-objective Search andOptimization Technique using Coarse-to-fine Grain Modeling. Kanpur GeneticAlgorithms Laboratory (KanGAL) Rep 200205. Kanpur Genetic AlgorithmsLaboratory (KanGAL), Kanpur.
Ngo, L.L., Madsen, H., Rosbjerg, D., 2007. Simulation and optimization modelingapproach for operation of the HoaBinh reservoir, Vietnam. J. Hydrol. 336,269e281.
Ostfeld, A., Salomonst, S., 2005. A hybrid genetic instance based learning algorithmfor CE-QUALW2 calibration. J. Hydrol. 310, 122e142.
Ratto, M., Castelletti, A., Pagano, A., 2012. Emulation techniques for the reductionand sensitivity analysis of complex environmental models. Environ. Model.Softw. 34, 1e4.
Razavi, S., Tolson, B.A., Burn, D.H., 2012. Review of surrogate modeling in water re-sources.WaterResour. Res. 48,W07401.http://dx.doi.org/10.1029/2011WR011527.
Rudenko, O., Schoenauer, M., 2004. A steady performance stopping criterion forpareto-based evolutionary algorithms. In: Proc. of the 6th Int. Multi-ObjectiveProgramming and Goal Programming Conf., Hammamet, Tunisia.
Santana-Quintero, L.V., Arias Montano, A., Coello Coello, C.A., 2010. A review oftechniques for handling expensive functions in evolutionary multi-objectiveoptimization. In: Tenne, Y., Goh, C.-K. (Eds.), Computational Intelligence inExpensive Optimization Problems. Springer, pp. 29e59. ALO 2.
Sayers, W., Savi�c, D., Kapelan, A., Kellagher, R., 2014. Artificial intelligence tech-niques for flood risk management in urban environments. Proc. Eng. 70 (2014),1505e1512.
Schultz, M.T., Small, M.J., Farrow, R.S., Fischbeck, P.S., 2004. State water pollutioncontrol policy insights from a reduced-form model. J. Water Resour. Plan.Manag. 130 (2), 150e159.
Schultz, M.T., Small, M.J., Fischbeck, P.S., Farrow, R.S., 2006. Evaluating responsesurface designs for uncertainty analysis and prescriptive applications of a large-scale water quality model. Environ. Model. Assess. 11 (4), 345e359.
Solomatine, D.P., Sherestha, D.L., 2009. A novel method to estimate model uncer-tainty using machine learning techniques. Water Resour. Res. 45, W00B11.http://dx.doi.org/10.1029/2008WR006839.
Solomatine, D.P., Torres, L.A., 1996. Neural network approximation of a hydrody-namic model in optimizing reservoir operation. In: Proc. 2nd Intern. Conf. onHydroinformatics, Zurich, September 1996, pp. 201e206.
Solomatine, D.P., Dibike, Y.B., Kukuric, N., 1999. Automatic calibration of ground-water models using global optimization techniques. Hydrol. Sci. J. 44 (6),879e894.
Sun, S.A., Djordjevic, S., Khu, S.T., 2011. A general framework for flood risk-basedstorm sewer network design. Urban Water J. 8 (1), 13e27.
WRI, 2011. Technical Reports of the Project: “Integrated Flood Management, CaseStudy: Kan Basin”. Water Research Institute, Ministry of Energy, Iran.
Yan, S., Minsker, B., 2006. Optimal groundwater remediation design using anAdaptive Neural Network Genetic Algorithm. Water Resour. Res. 42, W05407.http://dx.doi.org/10.1029/2005WR004303.
Yan, S., Minsker, B., 2011. Applying dynamic surrogate models in noisy genetic al-gorithms to optimize groundwater remediation designs. J. Water Resour. Plan.Manag. 137 (3), 284e292.
Yazdi, J., April 2013. Optimization of Flood Control System on Watershed Scaleunder Flood Uncertainties. PhD thesis. Tarbiat Modares University, Iran.
Yazdi, J., Salehi Neyshabouri, S.A.A., 2012. A Simulation-based optimization modelfor flood management on a watershed scale. Water Resour. Manag. 26 (15),4569e4586.

J. Yazdi, S.A.A. Salehi Neyshabouri / Environmental Modelling & Software 61 (2014) 106e120120
Yazdi, J., Salehi Neyshabouri, S.A.A., Niksokhan, M.H., Sheshangosht, S., Elmi, M.,2013. Optimal prioritization of watershed management measures for floodmitigation on watershed scale. J. Flood Risk Manag. 6 (4), 372e384.
Zecchin, A.C., Maier, H.R., Simpson, A.R., Leonard, M., Roberts, A.J., Berrisford, M.J.,2006. Application of two ant colony optimization algorithms to water distri-bution system optimization. Math. Comput. Model. 44, 451e468.
Zhan, C.S., Song, X.-M., Xia, J., Tong, C., 2013. An efficient integrated approach forglobal sensitivity analysis of hydrological model parameters. Environ. Model.Softw. 41, 39e52.
Zhang, X.S., Srinivasan, R., Van Liew, M., 2009. Approximating SWAT model usingartificial neural network and support vector machine. J. Am. Water Resour.Assoc. 45 (2), 460e474.
Zitzler, E., Deb, K., Thiele, L., 2000. Comparison of multi-objective evolutionary al-gorithms: Empirical results. Evolut. Comput., 173e195.
Zou, R., Lung, W.S., Wu, J., 2007. An adaptive neural network embedded geneticalgorithm approach for inverse water quality modeling. Water Resour. Res. 43,W08427. http://dx.doi.org/10.1029/2006WR005158.