
Adaptive Neuro-Fuzzy Inference System Based Path Planning...
8
Research Article Adaptive Neuro-Fuzzy Inference System Based Path Planning for Excavator Arm Nga Thi-Thuy Vu , Nam Phuong Tran , and Nam Hoai Nguyen Hanoi University of Science and Technology, Vietnam Correspondence should be addressed to Nga i-uy Vu; [email protected] Received 21 August 2018; Revised 8 November 2018; Accepted 19 November 2018; Published 2 December 2018 Academic Editor: Huosheng Hu Copyright © 2018 Nga i-uy Vu et al. is is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. is paper presents a scheme based on Adaptive Neuro-Fuzzy Inference Systems (ANFIS) to generate trajectory for excavator arm. Firstly, the trajectory is predesigned with some specific points in the work space to meet the requirements about the shape. Next, the inverse kinematic is used and optimization problems are solved to generate the via-points in the joint space. ese via-points are used as training set for ANFIS to synthesis the smooth curve. In this scheme, the outcome trajectory satisfies the requirements about both shape and optimization problems. Moreover, the algorithm is simple in calculation as the numbers of via-points are large. Finally, the simulation is done for two cases to test the effect of ANFIS structure on the generated trajectory. e simulation results demonstrate that, by using suitable structure of ANFIS, the proposed scheme can build the smooth trajectory which has the good matching with desired trajectory even that the desired trajectory has the complicated shape. 1. Introduction In the construction and mine fields, the excavator which is used to dig and transport of soil or coal is one of the important machines. e work environment of excavator is usually dangerous and harsh. erefore, developing the automatic excavator system is the general trend. In the unmanual oper- ation system, i.e., excavator system, the trajectory generation for the excavator base and arm is the hot spot because it determines the efficiencies of overall system. In the real, the excavator arm is a three-degree of freedom (3DOF) manipulator robot. e trajectory planning can be done in both working space and joint space. In the working space, the trajectory is built for end-effectors in three- dimension reference frame so it is quite visual. However, the trajectory built in this space has to face with problems of inverse kinematic and manipulator redundancy [1]. ere- fore, in the most case, the trajectory of the manipulator robot is planned in the joint space [2]. In the joint space, the trajectory is planned to meet some specific requirements such as time optimization, energy optimization, jerk optimization, obstacle avoidance, etc. In order to satisfy these conditions, the trajectory is usually predesigned with some via-points then the smooth curve is built using several interpolation such as polynomial, spline, Bezier, etc. In [3, 4] polynomial functions are used to generate the paths for robot arms. Reference [3] proposed a series of polynomials to create desired trajectory for robotic motion via a set of given point; they also addressed a problem of acceleration and jerk optimization. However, the main drawback of [3] is that numbers of parameter proportion to numbers of via-point, which leads to explosion of calculation when the numbers of given point are large. e problems of reducing vibration are solved in [4]; however, the generated trajectory is partial smooth. e Bezier Curve and modifier genetic algorithm are interested in [5] in order to create a path in dynamic field with avoiding obstacle and minimum path’s length. In recent year, neural networks and fuzzy systems which have ability to approximate functions and fit curves have been widely applied in the path planning field. ese algorithms seem to be more flexible and potential than traditional one because the methods based on neural network and fuzzy system can create a path through many via-points without explosion of calculation. In [6–10], the shunting model technique is used to build neural network for path planning Hindawi Journal of Robotics Volume 2018, Article ID 2571243, 7 pages https://doi.org/10.1155/2018/2571243
Transcript of Adaptive Neuro-Fuzzy Inference System Based Path Planning...

Research ArticleAdaptive Neuro-Fuzzy Inference System Based PathPlanning for Excavator Arm
Nga Thi-Thuy Vu Nam Phuong Tran and NamHoai Nguyen
Hanoi University of Science and Technology Vietnam
Correspondence should be addressed to NgaThi-Thuy Vu ngavuthithuyhusteduvn
Received 21 August 2018 Revised 8 November 2018 Accepted 19 November 2018 Published 2 December 2018
Academic Editor Huosheng Hu
Copyright copy 2018 Nga Thi-Thuy Vu et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
This paper presents a scheme based on Adaptive Neuro-Fuzzy Inference Systems (ANFIS) to generate trajectory for excavator armFirstly the trajectory is predesigned with some specific points in the work space to meet the requirements about the shape Nextthe inverse kinematic is used and optimization problems are solved to generate the via-points in the joint space These via-pointsare used as training set for ANFIS to synthesis the smooth curve In this scheme the outcome trajectory satisfies the requirementsabout both shape and optimization problems Moreover the algorithm is simple in calculation as the numbers of via-points arelarge Finally the simulation is done for two cases to test the effect of ANFIS structure on the generated trajectory The simulationresults demonstrate that by using suitable structure of ANFIS the proposed scheme can build the smooth trajectory which has thegood matching with desired trajectory even that the desired trajectory has the complicated shape
1 Introduction
In the construction and mine fields the excavator which isused to dig and transport of soil or coal is one of the importantmachines The work environment of excavator is usuallydangerous and harsh Therefore developing the automaticexcavator system is the general trend In the unmanual oper-ation system ie excavator system the trajectory generationfor the excavator base and arm is the hot spot because itdetermines the efficiencies of overall system
In the real the excavator arm is a three-degree of freedom(3DOF) manipulator robot The trajectory planning can bedone in both working space and joint space In the workingspace the trajectory is built for end-effectors in three-dimension reference frame so it is quite visual However thetrajectory built in this space has to face with problems ofinverse kinematic and manipulator redundancy [1] There-fore in the most case the trajectory of the manipulator robotis planned in the joint space [2]
In the joint space the trajectory is planned to meetsome specific requirements such as time optimization energyoptimization jerk optimization obstacle avoidance etc Inorder to satisfy these conditions the trajectory is usually
predesigned with some via-points then the smooth curve isbuilt using several interpolation such as polynomial splineBezier etc In [3 4] polynomial functions are used to generatethe paths for robot arms Reference [3] proposed a series ofpolynomials to create desired trajectory for robotic motionvia a set of given point they also addressed a problemof acceleration and jerk optimization However the maindrawback of [3] is that numbers of parameter proportion tonumbers of via-point which leads to explosion of calculationwhen the numbers of given point are large The problems ofreducing vibration are solved in [4] however the generatedtrajectory is partial smooth The Bezier Curve and modifiergenetic algorithm are interested in [5] in order to create a pathin dynamic field with avoiding obstacle and minimum pathrsquoslength
In recent year neural networks and fuzzy systems whichhave ability to approximate functions and fit curves have beenwidely applied in the path planning field These algorithmsseem to be more flexible and potential than traditional onebecause the methods based on neural network and fuzzysystem can create a path through many via-points withoutexplosion of calculation In [6ndash10] the shunting modeltechnique is used to build neural network for path planning
HindawiJournal of RoboticsVolume 2018 Article ID 2571243 7 pageshttpsdoiorg10115520182571243
2 Journal of Robotics
Base
Bucket
Stick
Boom
+
+
Figure 1 Block diagram of the excavator arm
problems In this method the neural dynamics of each neu-ron is characterized by a shunting equation or simple additiveequation [9] The trajectories in [6]-[8] are generated forrobots to avoid the static obstacles while in [9 10] robots canwork in dynamic environments with moving obstacles Thepulse-couple neural network is used in many application [11]and it is also applied into trajectory generation [12 13] Thisscheme can work in both static and dynamic environmentsbut the complete information about working conditions isnecessary In the field of learning method fuzzy system alsois used to solve the path planning problems [14ndash17] In [14]the fuzzy logic based on fuzzy sets algorithm is approachedto plan the path for the robotic placement of fabrics on awork table This fuzzy logic system is developed based onexperimental data and it has ability to work with variousmaterials and sizes while optimal fuzzy scheme is introducedin [15] for path planning of manipulator robots This is rule-based method which needs specific rules to generate thetrajectory for robots and it can deal with moving obstaclesIn order to generate a real-time and obstacle avoiding pathfor cushion robot a fuzzy system which have capability totransform directly human knowledge in machine is utilizedin [16] Moreover in [17] the fuzzy logic path planningalgorithm is investigated to guarantee the safe motion withobstacle avoidance for mobile robot
For the excavator in order to meet the requirement ofautomatic trend there are also some researches focusing onpath planning topic In [18 19] the laser scanner cameraand sensors are used to build 3D trajectory for automatedexcavator This method gives the good result in the cleanenvironment but the reliability of laser scanner and camerawill reduce in the dusty environment In [20] the currentposition of excavator arm is feedback to control system to pre-dict the trajectory for next cycle The neural network is usedin [21] to determine the characteristic of the soil From thisresult in combination with the reaction force exerted on thebucket the optimal trajectory is generated for excavator armIn [22ndash24] the velocity and acceleration of bucket are used tobuild the path for excavator arm The generated trajectory isoptimal but velocity and acceleration are difficult to measure
In this paper an algorithm based on ANFIS is proposedto generate trajectory for excavator arm Firstly the trajectoryis predesigned with some specific points in the work spaceto meet the requirements about the shape Next the inversekinematic is used and optimization problems are solved togenerate the via-points in the joint space These via-pointsare used as training set for ANFIS to synthesis the smoothcurve In this scheme the outcome trajectory satisfies therequirements about both shape and optimization problemsMoreover the algorithm is simple in calculation as thenumbers of via-points are large Finally the simulation isdone for two cases to test the effect of ANFIS structure on thegenerated trajectoryThe simulation results demonstrate thatby using suitable structure of ANFIS the proposed schemecan build the smooth trajectory which has the goodmatchingwith desired trajectory even that the desired trajectory has thecomplicated shape
2 Path Planning for Excavator ArmBased on ANFIS
21 Problem Description Consider the excavator system asshown in Figure 1 It is assumed that the base is fixed and thearm of excavator operates in the x0O0z0 plane
To execute the digging task with satisfying technical con-straints the trajectory of excavator arm should go throughsome predesigned points These points are selected from thedesired shape optimization criteria constraints etc Fromgiven via-point it is necessary to build the smooth curve forexcavator to operate
In order to minimize the time and jerk the followingoptimization problem should be solvent [25]
119891119894119899119889 min 119869 = 119896119879119873119899minus1sum119894=1
ℎ119894 + 119896119869int1199051198910(119902 (119905))2 119889119905
119904119906119887119895119890119888119905 119905119900 10038161003816100381610038161003816 119902119895 (119905)10038161003816100381610038161003816 le 119881119862119895 119895 = 1 sdot sdot sdot 11987310038161003816100381610038161003816 119902119895 (119905)10038161003816100381610038161003816 le 119882119862119895 119895 = 1 sdot sdot sdot 11987310038161003816100381610038161003816119902119895 (119905)10038161003816100381610038161003816 le 119869119862119895 119895 = 1 sdot sdot sdot 119873
(1)
Journal of Robotics 3
input inputmf rule outputmf output
Figure 2 The ANFIS architecture
where kT and kJ are scalars N are the numbers of joint n arethe numbers of via-points of hi is time interval between twovia-points 119902(119905) 119902(119905) and 119902(119905) are velocity acceleration andjerk of the jth joint respectively and VCj WCj and JCj isthe bound of velocity acceleration and jerk for the jth jointrespectively
The objective function (1) can be expressed as follows[26]
119869 = 119896119879119873119899minus1sum119894=1
ℎ119894 + 119896119869 119873sum119895=1
119899minus1sum119894=1
[120572119894119895 minus 1205722119894119895ℎ119894 ] (2)
subject to the constraints
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119881119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119882119862119895 forall119895 = 1 11987310038161003816100381610038161003816100381610038161003816120572119895119894+1 minus 120572119895119894ℎ119894
10038161003816100381610038161003816100381610038161003816 le 119869119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
(3)
where 120572ij is the acceleration of the jth joint at the ith via-point
Solve the optimal problem (2) by using SequentialQuadratic Programing technique (Optimization Toolbox ofMatlab) to get the via-points
After getting suitable via-points the ANFIS is used tocreate the smooth trajectory for three joints
22 ANFIS System Design and Training In this researchANFIS is utilized like a tool for curve fitting The taskof designing reference trajectory is to create a smooth-continuous path which passes some given points ThreeANFIS systems which are based on the Sugeno model aredesigned to plan paths for three joints Each ANFIS systemuses the same membership function for fuzzy sets so weare going to analyze and represent one of the three ANFISsystems
The input and output of each ANFIS system is timevariable ldquotrdquo and joint variable ldquothetardquo respectively The ith if-then rule is as follows
Rule 119894 If 119905 is small then theta = 119891i (119905) (4)
The ANFIS architecture is shown as Figure 2 It consistsof five layers
(i) Layer 1 this layer performs a fuzzification processTheGauss function is used as membership function in this studyIt is defined as follows
1198741119894 = 120583119894 = 119890minus(119905minus119888119894)221205902119894 (5)
The parameters ci and 120590i of first layer are typically referredas to the premise parameters
(ii) Layer 2 this layer is fixed and nonadaptive Its nodehas a functionwhichmultiplies the incoming signals from theoutputs of the previous layer to obtain the firing strength ofconditional clauses If there exists only one input then
1198742119894 = 120572119894 = 120583119894 (6)
(iii) Layer 3 this layer also has not included trainableparameters The output of each node is the ratio of the ithrulersquos matching degree to the total of all rulesrsquo matchingdegree
1198743119894 = 120572119894 = 120572119894sum119894 120572119894 (7)
(iv) Layer 4 the parameters of this layer can be modifiedto adapt to training data The function in each node of thelayer is defined as
1198744119894 = 120572119894 times 119891119894 = 120572119894 times (p1198941199051 + 119903119894) (8)
where pi ri are referred as to consequent parameters(v) Layer 5 this layer has only one node Its output is the
sum of all outputs from the fourth layer
1198745 = sum119894
120572119894119891119894 (9)
For training the ANFIS it is able to apply the gradientmethod But thismethod has slow convergence rate and tendsto be trapped at local minima To deal with this problem [27]proposed amethod which is the combination of the gradientmethod and the least square estimator (LSE)method namelythe hybrid algorithm The training process is divided intotwo parts that is referred as forward-path and backward-pathIn forward-path premise parameters are kept unchanged sothe output of the ANFIS is a linear function of consequentparameters Then the least square error (LSE) method isapplied to adjust these parameters Next the consequentparameters are fixed and premise parameters are updatedbased on the gradient algorithmThis hybrid algorithm is ableto provide faster convergence and avoid the occurrence oflocal minima because of the reduction in dimension of thesearch space For these advantages of hybrid algorithm wewill use this method for the ANFIS training
23 Path Planning Procedure With the information in theprevious parts it is possible to generate the trajectory forexcavator arm which satisfies some requirements about opti-mization and smooth The sequence for this process has thefollowing steps
(i) Step 1 get the desired points based on shaped andoptimal issues then use inverse kinematics to obtain the via-points in the joint space as training sample
(ii) Step 2 design ANFIS architecture(iii) Step 3 train ANFIS
4 Journal of Robotics
Table 1 Parameters of the ANFIS after training
ci 120590119894 pi ri
1st joint 24929 31575 -00260 0692328817 156040 00059 0345034474 207265 -00102 10390
2nd joint 12196 66245 -00359 -1494513634 81598 -00171 -1774109156 139925 00016 -20630
3rd joint 15545 49146 00681 0795440780 160198 00401 1131433035 204656 00327 02277
Table 2 Parameters of the ANFIS after training for the 1st joint (Case 2)ci 120590119894 pi ri11440 01237 -00235 0689414447 32746 -00236 0691016017 62853 00179 0686017003 74553 00518 -0146707788 96823 00055 0360104393 128548 00059 0397205287 158631 00434 -0126105801 188813 00434 -0125604406 223654 0 0785910550 250155 0 07855
Table 3 Parameters of the ANFIS after training for the 2nd joint (Case 2)ci 120590119894 pi ri26620 05242 -00485 -1511322012 46932 -00550 -1414606739 100057 -00124 -1813016379 152547 -00005 -2032322804 198801 00034 -2096520898 249830 00014 -20627
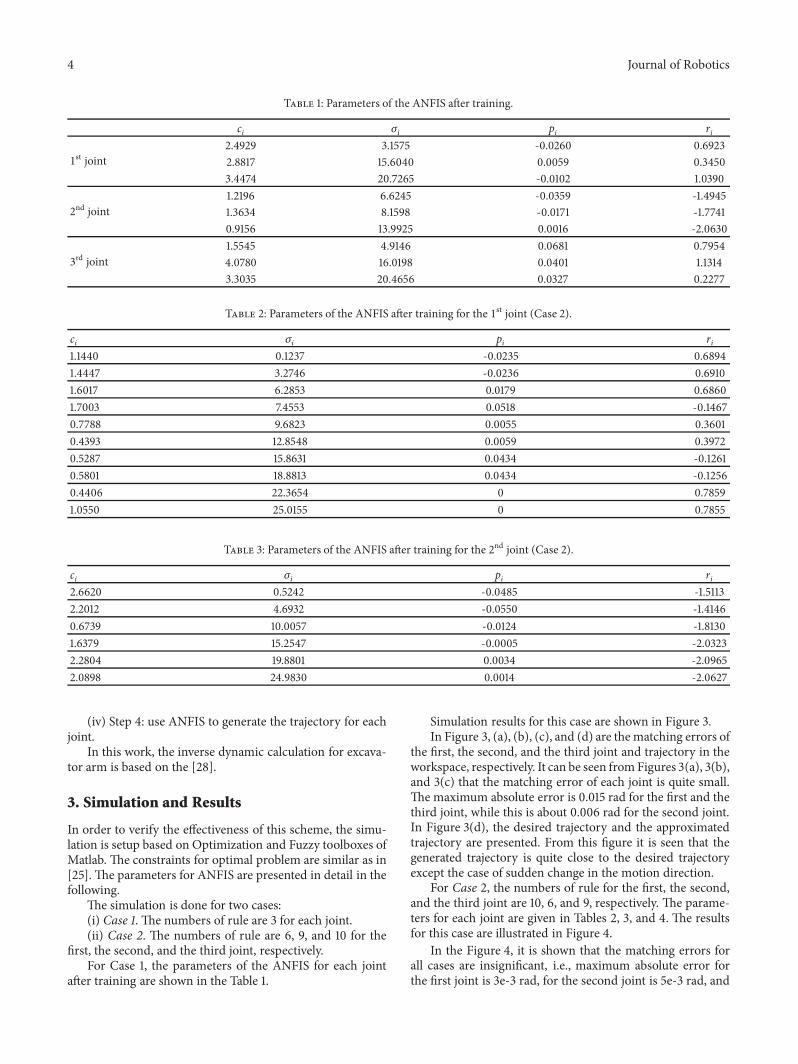
(iv) Step 4 use ANFIS to generate the trajectory for eachjoint
In this work the inverse dynamic calculation for excava-tor arm is based on the [28]
3 Simulation and Results
In order to verify the effectiveness of this scheme the simu-lation is setup based on Optimization and Fuzzy toolboxes ofMatlab The constraints for optimal problem are similar as in[25] The parameters for ANFIS are presented in detail in thefollowing
The simulation is done for two cases(i) Case 1 The numbers of rule are 3 for each joint(ii) Case 2 The numbers of rule are 6 9 and 10 for the
first the second and the third joint respectivelyFor Case 1 the parameters of the ANFIS for each joint
after training are shown in the Table 1
Simulation results for this case are shown in Figure 3In Figure 3 (a) (b) (c) and (d) are the matching errors of
the first the second and the third joint and trajectory in theworkspace respectively It can be seen fromFigures 3(a) 3(b)and 3(c) that the matching error of each joint is quite smallThe maximum absolute error is 0015 rad for the first and thethird joint while this is about 0006 rad for the second jointIn Figure 3(d) the desired trajectory and the approximatedtrajectory are presented From this figure it is seen that thegenerated trajectory is quite close to the desired trajectoryexcept the case of sudden change in the motion direction
For Case 2 the numbers of rule for the first the secondand the third joint are 10 6 and 9 respectively The parame-ters for each joint are given in Tables 2 3 and 4 The resultsfor this case are illustrated in Figure 4
In the Figure 4 it is shown that the matching errors forall cases are insignificant ie maximum absolute error forthe first joint is 3e-3 rad for the second joint is 5e-3 rad and
Journal of Robotics 5
Table 4 Parameters of the ANFIS after training for the 3rd joint (Case 2)ci 120590119894 pi ri19499 08483 00684 0839623933 36964 00802 0733904202 78501 00859 0701608204 103098 00127 1382205266 125082 -00044 1621108842 162364 -00438 2171705693 189473 -00471 2230103972 223126 00001 1238310464 250587 0 12392
0 5 10 15 20 25Time (sec)
(a)
(c)
(b)
(d)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-fir
st jo
int (
rad)
0 5 10 15 20 25Time (sec)
minus0015
minus001
minus0005
0
0005
001
Erro
r-se
cond
join
t (ra
d)
0 5 10 15 20 25Time (sec)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-th
ird
join
t (ra
d)
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
Figure 3 Training result for Case 1
for the third joint is 4e-4 rad The learned trajectory exactlyfollows the designed trajectory even under the condition ofabrupt alteration of motion direction
From the above simulation results it is feasible to buildthe trajectory for excavator arm using an ANFIS By choosing
suitable structure and parameters of neural network as wellas the numbers of fuzzy rule the ANFIS can create thesmooth trajectory which has the good matching with desiredone despite the condition that the desired trajectory has acomplicated shape
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

2 Journal of Robotics
Base
Bucket
Stick
Boom
+
+
Figure 1 Block diagram of the excavator arm
problems In this method the neural dynamics of each neu-ron is characterized by a shunting equation or simple additiveequation [9] The trajectories in [6]-[8] are generated forrobots to avoid the static obstacles while in [9 10] robots canwork in dynamic environments with moving obstacles Thepulse-couple neural network is used in many application [11]and it is also applied into trajectory generation [12 13] Thisscheme can work in both static and dynamic environmentsbut the complete information about working conditions isnecessary In the field of learning method fuzzy system alsois used to solve the path planning problems [14ndash17] In [14]the fuzzy logic based on fuzzy sets algorithm is approachedto plan the path for the robotic placement of fabrics on awork table This fuzzy logic system is developed based onexperimental data and it has ability to work with variousmaterials and sizes while optimal fuzzy scheme is introducedin [15] for path planning of manipulator robots This is rule-based method which needs specific rules to generate thetrajectory for robots and it can deal with moving obstaclesIn order to generate a real-time and obstacle avoiding pathfor cushion robot a fuzzy system which have capability totransform directly human knowledge in machine is utilizedin [16] Moreover in [17] the fuzzy logic path planningalgorithm is investigated to guarantee the safe motion withobstacle avoidance for mobile robot
For the excavator in order to meet the requirement ofautomatic trend there are also some researches focusing onpath planning topic In [18 19] the laser scanner cameraand sensors are used to build 3D trajectory for automatedexcavator This method gives the good result in the cleanenvironment but the reliability of laser scanner and camerawill reduce in the dusty environment In [20] the currentposition of excavator arm is feedback to control system to pre-dict the trajectory for next cycle The neural network is usedin [21] to determine the characteristic of the soil From thisresult in combination with the reaction force exerted on thebucket the optimal trajectory is generated for excavator armIn [22ndash24] the velocity and acceleration of bucket are used tobuild the path for excavator arm The generated trajectory isoptimal but velocity and acceleration are difficult to measure
In this paper an algorithm based on ANFIS is proposedto generate trajectory for excavator arm Firstly the trajectoryis predesigned with some specific points in the work spaceto meet the requirements about the shape Next the inversekinematic is used and optimization problems are solved togenerate the via-points in the joint space These via-pointsare used as training set for ANFIS to synthesis the smoothcurve In this scheme the outcome trajectory satisfies therequirements about both shape and optimization problemsMoreover the algorithm is simple in calculation as thenumbers of via-points are large Finally the simulation isdone for two cases to test the effect of ANFIS structure on thegenerated trajectoryThe simulation results demonstrate thatby using suitable structure of ANFIS the proposed schemecan build the smooth trajectory which has the goodmatchingwith desired trajectory even that the desired trajectory has thecomplicated shape
2 Path Planning for Excavator ArmBased on ANFIS
21 Problem Description Consider the excavator system asshown in Figure 1 It is assumed that the base is fixed and thearm of excavator operates in the x0O0z0 plane
To execute the digging task with satisfying technical con-straints the trajectory of excavator arm should go throughsome predesigned points These points are selected from thedesired shape optimization criteria constraints etc Fromgiven via-point it is necessary to build the smooth curve forexcavator to operate
In order to minimize the time and jerk the followingoptimization problem should be solvent [25]
119891119894119899119889 min 119869 = 119896119879119873119899minus1sum119894=1
ℎ119894 + 119896119869int1199051198910(119902 (119905))2 119889119905
119904119906119887119895119890119888119905 119905119900 10038161003816100381610038161003816 119902119895 (119905)10038161003816100381610038161003816 le 119881119862119895 119895 = 1 sdot sdot sdot 11987310038161003816100381610038161003816 119902119895 (119905)10038161003816100381610038161003816 le 119882119862119895 119895 = 1 sdot sdot sdot 11987310038161003816100381610038161003816119902119895 (119905)10038161003816100381610038161003816 le 119869119862119895 119895 = 1 sdot sdot sdot 119873
(1)
Journal of Robotics 3
input inputmf rule outputmf output
Figure 2 The ANFIS architecture
where kT and kJ are scalars N are the numbers of joint n arethe numbers of via-points of hi is time interval between twovia-points 119902(119905) 119902(119905) and 119902(119905) are velocity acceleration andjerk of the jth joint respectively and VCj WCj and JCj isthe bound of velocity acceleration and jerk for the jth jointrespectively
The objective function (1) can be expressed as follows[26]
119869 = 119896119879119873119899minus1sum119894=1
ℎ119894 + 119896119869 119873sum119895=1
119899minus1sum119894=1
[120572119894119895 minus 1205722119894119895ℎ119894 ] (2)
subject to the constraints
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119881119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119882119862119895 forall119895 = 1 11987310038161003816100381610038161003816100381610038161003816120572119895119894+1 minus 120572119895119894ℎ119894
10038161003816100381610038161003816100381610038161003816 le 119869119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
(3)
where 120572ij is the acceleration of the jth joint at the ith via-point
Solve the optimal problem (2) by using SequentialQuadratic Programing technique (Optimization Toolbox ofMatlab) to get the via-points
After getting suitable via-points the ANFIS is used tocreate the smooth trajectory for three joints
22 ANFIS System Design and Training In this researchANFIS is utilized like a tool for curve fitting The taskof designing reference trajectory is to create a smooth-continuous path which passes some given points ThreeANFIS systems which are based on the Sugeno model aredesigned to plan paths for three joints Each ANFIS systemuses the same membership function for fuzzy sets so weare going to analyze and represent one of the three ANFISsystems
The input and output of each ANFIS system is timevariable ldquotrdquo and joint variable ldquothetardquo respectively The ith if-then rule is as follows
Rule 119894 If 119905 is small then theta = 119891i (119905) (4)
The ANFIS architecture is shown as Figure 2 It consistsof five layers
(i) Layer 1 this layer performs a fuzzification processTheGauss function is used as membership function in this studyIt is defined as follows
1198741119894 = 120583119894 = 119890minus(119905minus119888119894)221205902119894 (5)
The parameters ci and 120590i of first layer are typically referredas to the premise parameters
(ii) Layer 2 this layer is fixed and nonadaptive Its nodehas a functionwhichmultiplies the incoming signals from theoutputs of the previous layer to obtain the firing strength ofconditional clauses If there exists only one input then
1198742119894 = 120572119894 = 120583119894 (6)
(iii) Layer 3 this layer also has not included trainableparameters The output of each node is the ratio of the ithrulersquos matching degree to the total of all rulesrsquo matchingdegree
1198743119894 = 120572119894 = 120572119894sum119894 120572119894 (7)
(iv) Layer 4 the parameters of this layer can be modifiedto adapt to training data The function in each node of thelayer is defined as
1198744119894 = 120572119894 times 119891119894 = 120572119894 times (p1198941199051 + 119903119894) (8)
where pi ri are referred as to consequent parameters(v) Layer 5 this layer has only one node Its output is the
sum of all outputs from the fourth layer
1198745 = sum119894
120572119894119891119894 (9)
For training the ANFIS it is able to apply the gradientmethod But thismethod has slow convergence rate and tendsto be trapped at local minima To deal with this problem [27]proposed amethod which is the combination of the gradientmethod and the least square estimator (LSE)method namelythe hybrid algorithm The training process is divided intotwo parts that is referred as forward-path and backward-pathIn forward-path premise parameters are kept unchanged sothe output of the ANFIS is a linear function of consequentparameters Then the least square error (LSE) method isapplied to adjust these parameters Next the consequentparameters are fixed and premise parameters are updatedbased on the gradient algorithmThis hybrid algorithm is ableto provide faster convergence and avoid the occurrence oflocal minima because of the reduction in dimension of thesearch space For these advantages of hybrid algorithm wewill use this method for the ANFIS training
23 Path Planning Procedure With the information in theprevious parts it is possible to generate the trajectory forexcavator arm which satisfies some requirements about opti-mization and smooth The sequence for this process has thefollowing steps
(i) Step 1 get the desired points based on shaped andoptimal issues then use inverse kinematics to obtain the via-points in the joint space as training sample
(ii) Step 2 design ANFIS architecture(iii) Step 3 train ANFIS
4 Journal of Robotics
Table 1 Parameters of the ANFIS after training
ci 120590119894 pi ri
1st joint 24929 31575 -00260 0692328817 156040 00059 0345034474 207265 -00102 10390
2nd joint 12196 66245 -00359 -1494513634 81598 -00171 -1774109156 139925 00016 -20630
3rd joint 15545 49146 00681 0795440780 160198 00401 1131433035 204656 00327 02277
Table 2 Parameters of the ANFIS after training for the 1st joint (Case 2)ci 120590119894 pi ri11440 01237 -00235 0689414447 32746 -00236 0691016017 62853 00179 0686017003 74553 00518 -0146707788 96823 00055 0360104393 128548 00059 0397205287 158631 00434 -0126105801 188813 00434 -0125604406 223654 0 0785910550 250155 0 07855
Table 3 Parameters of the ANFIS after training for the 2nd joint (Case 2)ci 120590119894 pi ri26620 05242 -00485 -1511322012 46932 -00550 -1414606739 100057 -00124 -1813016379 152547 -00005 -2032322804 198801 00034 -2096520898 249830 00014 -20627
(iv) Step 4 use ANFIS to generate the trajectory for eachjoint
In this work the inverse dynamic calculation for excava-tor arm is based on the [28]
3 Simulation and Results
In order to verify the effectiveness of this scheme the simu-lation is setup based on Optimization and Fuzzy toolboxes ofMatlab The constraints for optimal problem are similar as in[25] The parameters for ANFIS are presented in detail in thefollowing
The simulation is done for two cases(i) Case 1 The numbers of rule are 3 for each joint(ii) Case 2 The numbers of rule are 6 9 and 10 for the
first the second and the third joint respectivelyFor Case 1 the parameters of the ANFIS for each joint
after training are shown in the Table 1
Simulation results for this case are shown in Figure 3In Figure 3 (a) (b) (c) and (d) are the matching errors of
the first the second and the third joint and trajectory in theworkspace respectively It can be seen fromFigures 3(a) 3(b)and 3(c) that the matching error of each joint is quite smallThe maximum absolute error is 0015 rad for the first and thethird joint while this is about 0006 rad for the second jointIn Figure 3(d) the desired trajectory and the approximatedtrajectory are presented From this figure it is seen that thegenerated trajectory is quite close to the desired trajectoryexcept the case of sudden change in the motion direction
For Case 2 the numbers of rule for the first the secondand the third joint are 10 6 and 9 respectively The parame-ters for each joint are given in Tables 2 3 and 4 The resultsfor this case are illustrated in Figure 4
In the Figure 4 it is shown that the matching errors forall cases are insignificant ie maximum absolute error forthe first joint is 3e-3 rad for the second joint is 5e-3 rad and
Journal of Robotics 5
Table 4 Parameters of the ANFIS after training for the 3rd joint (Case 2)ci 120590119894 pi ri19499 08483 00684 0839623933 36964 00802 0733904202 78501 00859 0701608204 103098 00127 1382205266 125082 -00044 1621108842 162364 -00438 2171705693 189473 -00471 2230103972 223126 00001 1238310464 250587 0 12392
0 5 10 15 20 25Time (sec)
(a)
(c)
(b)
(d)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-fir
st jo
int (
rad)
0 5 10 15 20 25Time (sec)
minus0015
minus001
minus0005
0
0005
001
Erro
r-se
cond
join
t (ra
d)
0 5 10 15 20 25Time (sec)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-th
ird
join
t (ra
d)
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
Figure 3 Training result for Case 1
for the third joint is 4e-4 rad The learned trajectory exactlyfollows the designed trajectory even under the condition ofabrupt alteration of motion direction
From the above simulation results it is feasible to buildthe trajectory for excavator arm using an ANFIS By choosing
suitable structure and parameters of neural network as wellas the numbers of fuzzy rule the ANFIS can create thesmooth trajectory which has the good matching with desiredone despite the condition that the desired trajectory has acomplicated shape
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 3
input inputmf rule outputmf output
Figure 2 The ANFIS architecture
where kT and kJ are scalars N are the numbers of joint n arethe numbers of via-points of hi is time interval between twovia-points 119902(119905) 119902(119905) and 119902(119905) are velocity acceleration andjerk of the jth joint respectively and VCj WCj and JCj isthe bound of velocity acceleration and jerk for the jth jointrespectively
The objective function (1) can be expressed as follows[26]
119869 = 119896119879119873119899minus1sum119894=1
ℎ119894 + 119896119869 119873sum119895=1
119899minus1sum119894=1
[120572119894119895 minus 1205722119894119895ℎ119894 ] (2)
subject to the constraints
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119881119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
max 10038161003816100381610038161003816120572119895110038161003816100381610038161003816 1003816100381610038161003816100381612057211989511989910038161003816100381610038161003816 le 119882119862119895 forall119895 = 1 11987310038161003816100381610038161003816100381610038161003816120572119895119894+1 minus 120572119895119894ℎ119894
10038161003816100381610038161003816100381610038161003816 le 119869119862119895forall119895 = 1 119873 forall119894 = 1 119899 minus 1
(3)
where 120572ij is the acceleration of the jth joint at the ith via-point
Solve the optimal problem (2) by using SequentialQuadratic Programing technique (Optimization Toolbox ofMatlab) to get the via-points
After getting suitable via-points the ANFIS is used tocreate the smooth trajectory for three joints
22 ANFIS System Design and Training In this researchANFIS is utilized like a tool for curve fitting The taskof designing reference trajectory is to create a smooth-continuous path which passes some given points ThreeANFIS systems which are based on the Sugeno model aredesigned to plan paths for three joints Each ANFIS systemuses the same membership function for fuzzy sets so weare going to analyze and represent one of the three ANFISsystems
The input and output of each ANFIS system is timevariable ldquotrdquo and joint variable ldquothetardquo respectively The ith if-then rule is as follows
Rule 119894 If 119905 is small then theta = 119891i (119905) (4)
The ANFIS architecture is shown as Figure 2 It consistsof five layers
(i) Layer 1 this layer performs a fuzzification processTheGauss function is used as membership function in this studyIt is defined as follows
1198741119894 = 120583119894 = 119890minus(119905minus119888119894)221205902119894 (5)
The parameters ci and 120590i of first layer are typically referredas to the premise parameters
(ii) Layer 2 this layer is fixed and nonadaptive Its nodehas a functionwhichmultiplies the incoming signals from theoutputs of the previous layer to obtain the firing strength ofconditional clauses If there exists only one input then
1198742119894 = 120572119894 = 120583119894 (6)
(iii) Layer 3 this layer also has not included trainableparameters The output of each node is the ratio of the ithrulersquos matching degree to the total of all rulesrsquo matchingdegree
1198743119894 = 120572119894 = 120572119894sum119894 120572119894 (7)
(iv) Layer 4 the parameters of this layer can be modifiedto adapt to training data The function in each node of thelayer is defined as
1198744119894 = 120572119894 times 119891119894 = 120572119894 times (p1198941199051 + 119903119894) (8)
where pi ri are referred as to consequent parameters(v) Layer 5 this layer has only one node Its output is the
sum of all outputs from the fourth layer
1198745 = sum119894
120572119894119891119894 (9)
For training the ANFIS it is able to apply the gradientmethod But thismethod has slow convergence rate and tendsto be trapped at local minima To deal with this problem [27]proposed amethod which is the combination of the gradientmethod and the least square estimator (LSE)method namelythe hybrid algorithm The training process is divided intotwo parts that is referred as forward-path and backward-pathIn forward-path premise parameters are kept unchanged sothe output of the ANFIS is a linear function of consequentparameters Then the least square error (LSE) method isapplied to adjust these parameters Next the consequentparameters are fixed and premise parameters are updatedbased on the gradient algorithmThis hybrid algorithm is ableto provide faster convergence and avoid the occurrence oflocal minima because of the reduction in dimension of thesearch space For these advantages of hybrid algorithm wewill use this method for the ANFIS training
23 Path Planning Procedure With the information in theprevious parts it is possible to generate the trajectory forexcavator arm which satisfies some requirements about opti-mization and smooth The sequence for this process has thefollowing steps
(i) Step 1 get the desired points based on shaped andoptimal issues then use inverse kinematics to obtain the via-points in the joint space as training sample
(ii) Step 2 design ANFIS architecture(iii) Step 3 train ANFIS
4 Journal of Robotics
Table 1 Parameters of the ANFIS after training
ci 120590119894 pi ri
1st joint 24929 31575 -00260 0692328817 156040 00059 0345034474 207265 -00102 10390
2nd joint 12196 66245 -00359 -1494513634 81598 -00171 -1774109156 139925 00016 -20630
3rd joint 15545 49146 00681 0795440780 160198 00401 1131433035 204656 00327 02277
Table 2 Parameters of the ANFIS after training for the 1st joint (Case 2)ci 120590119894 pi ri11440 01237 -00235 0689414447 32746 -00236 0691016017 62853 00179 0686017003 74553 00518 -0146707788 96823 00055 0360104393 128548 00059 0397205287 158631 00434 -0126105801 188813 00434 -0125604406 223654 0 0785910550 250155 0 07855
Table 3 Parameters of the ANFIS after training for the 2nd joint (Case 2)ci 120590119894 pi ri26620 05242 -00485 -1511322012 46932 -00550 -1414606739 100057 -00124 -1813016379 152547 -00005 -2032322804 198801 00034 -2096520898 249830 00014 -20627
(iv) Step 4 use ANFIS to generate the trajectory for eachjoint
In this work the inverse dynamic calculation for excava-tor arm is based on the [28]
3 Simulation and Results
In order to verify the effectiveness of this scheme the simu-lation is setup based on Optimization and Fuzzy toolboxes ofMatlab The constraints for optimal problem are similar as in[25] The parameters for ANFIS are presented in detail in thefollowing
The simulation is done for two cases(i) Case 1 The numbers of rule are 3 for each joint(ii) Case 2 The numbers of rule are 6 9 and 10 for the
first the second and the third joint respectivelyFor Case 1 the parameters of the ANFIS for each joint
after training are shown in the Table 1
Simulation results for this case are shown in Figure 3In Figure 3 (a) (b) (c) and (d) are the matching errors of
the first the second and the third joint and trajectory in theworkspace respectively It can be seen fromFigures 3(a) 3(b)and 3(c) that the matching error of each joint is quite smallThe maximum absolute error is 0015 rad for the first and thethird joint while this is about 0006 rad for the second jointIn Figure 3(d) the desired trajectory and the approximatedtrajectory are presented From this figure it is seen that thegenerated trajectory is quite close to the desired trajectoryexcept the case of sudden change in the motion direction
For Case 2 the numbers of rule for the first the secondand the third joint are 10 6 and 9 respectively The parame-ters for each joint are given in Tables 2 3 and 4 The resultsfor this case are illustrated in Figure 4
In the Figure 4 it is shown that the matching errors forall cases are insignificant ie maximum absolute error forthe first joint is 3e-3 rad for the second joint is 5e-3 rad and
Journal of Robotics 5
Table 4 Parameters of the ANFIS after training for the 3rd joint (Case 2)ci 120590119894 pi ri19499 08483 00684 0839623933 36964 00802 0733904202 78501 00859 0701608204 103098 00127 1382205266 125082 -00044 1621108842 162364 -00438 2171705693 189473 -00471 2230103972 223126 00001 1238310464 250587 0 12392
0 5 10 15 20 25Time (sec)
(a)
(c)
(b)
(d)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-fir
st jo
int (
rad)
0 5 10 15 20 25Time (sec)
minus0015
minus001
minus0005
0
0005
001
Erro
r-se
cond
join
t (ra
d)
0 5 10 15 20 25Time (sec)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-th
ird
join
t (ra
d)
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
Figure 3 Training result for Case 1
for the third joint is 4e-4 rad The learned trajectory exactlyfollows the designed trajectory even under the condition ofabrupt alteration of motion direction
From the above simulation results it is feasible to buildthe trajectory for excavator arm using an ANFIS By choosing
suitable structure and parameters of neural network as wellas the numbers of fuzzy rule the ANFIS can create thesmooth trajectory which has the good matching with desiredone despite the condition that the desired trajectory has acomplicated shape
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
4 Journal of Robotics
Table 1 Parameters of the ANFIS after training
ci 120590119894 pi ri
1st joint 24929 31575 -00260 0692328817 156040 00059 0345034474 207265 -00102 10390
2nd joint 12196 66245 -00359 -1494513634 81598 -00171 -1774109156 139925 00016 -20630
3rd joint 15545 49146 00681 0795440780 160198 00401 1131433035 204656 00327 02277
Table 2 Parameters of the ANFIS after training for the 1st joint (Case 2)ci 120590119894 pi ri11440 01237 -00235 0689414447 32746 -00236 0691016017 62853 00179 0686017003 74553 00518 -0146707788 96823 00055 0360104393 128548 00059 0397205287 158631 00434 -0126105801 188813 00434 -0125604406 223654 0 0785910550 250155 0 07855
Table 3 Parameters of the ANFIS after training for the 2nd joint (Case 2)ci 120590119894 pi ri26620 05242 -00485 -1511322012 46932 -00550 -1414606739 100057 -00124 -1813016379 152547 -00005 -2032322804 198801 00034 -2096520898 249830 00014 -20627
(iv) Step 4 use ANFIS to generate the trajectory for eachjoint
In this work the inverse dynamic calculation for excava-tor arm is based on the [28]
3 Simulation and Results
In order to verify the effectiveness of this scheme the simu-lation is setup based on Optimization and Fuzzy toolboxes ofMatlab The constraints for optimal problem are similar as in[25] The parameters for ANFIS are presented in detail in thefollowing
The simulation is done for two cases(i) Case 1 The numbers of rule are 3 for each joint(ii) Case 2 The numbers of rule are 6 9 and 10 for the
first the second and the third joint respectivelyFor Case 1 the parameters of the ANFIS for each joint
after training are shown in the Table 1
Simulation results for this case are shown in Figure 3In Figure 3 (a) (b) (c) and (d) are the matching errors of
the first the second and the third joint and trajectory in theworkspace respectively It can be seen fromFigures 3(a) 3(b)and 3(c) that the matching error of each joint is quite smallThe maximum absolute error is 0015 rad for the first and thethird joint while this is about 0006 rad for the second jointIn Figure 3(d) the desired trajectory and the approximatedtrajectory are presented From this figure it is seen that thegenerated trajectory is quite close to the desired trajectoryexcept the case of sudden change in the motion direction
For Case 2 the numbers of rule for the first the secondand the third joint are 10 6 and 9 respectively The parame-ters for each joint are given in Tables 2 3 and 4 The resultsfor this case are illustrated in Figure 4
In the Figure 4 it is shown that the matching errors forall cases are insignificant ie maximum absolute error forthe first joint is 3e-3 rad for the second joint is 5e-3 rad and
Journal of Robotics 5
Table 4 Parameters of the ANFIS after training for the 3rd joint (Case 2)ci 120590119894 pi ri19499 08483 00684 0839623933 36964 00802 0733904202 78501 00859 0701608204 103098 00127 1382205266 125082 -00044 1621108842 162364 -00438 2171705693 189473 -00471 2230103972 223126 00001 1238310464 250587 0 12392
0 5 10 15 20 25Time (sec)
(a)
(c)
(b)
(d)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-fir
st jo
int (
rad)
0 5 10 15 20 25Time (sec)
minus0015
minus001
minus0005
0
0005
001
Erro
r-se
cond
join
t (ra
d)
0 5 10 15 20 25Time (sec)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-th
ird
join
t (ra
d)
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
Figure 3 Training result for Case 1
for the third joint is 4e-4 rad The learned trajectory exactlyfollows the designed trajectory even under the condition ofabrupt alteration of motion direction
From the above simulation results it is feasible to buildthe trajectory for excavator arm using an ANFIS By choosing
suitable structure and parameters of neural network as wellas the numbers of fuzzy rule the ANFIS can create thesmooth trajectory which has the good matching with desiredone despite the condition that the desired trajectory has acomplicated shape
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
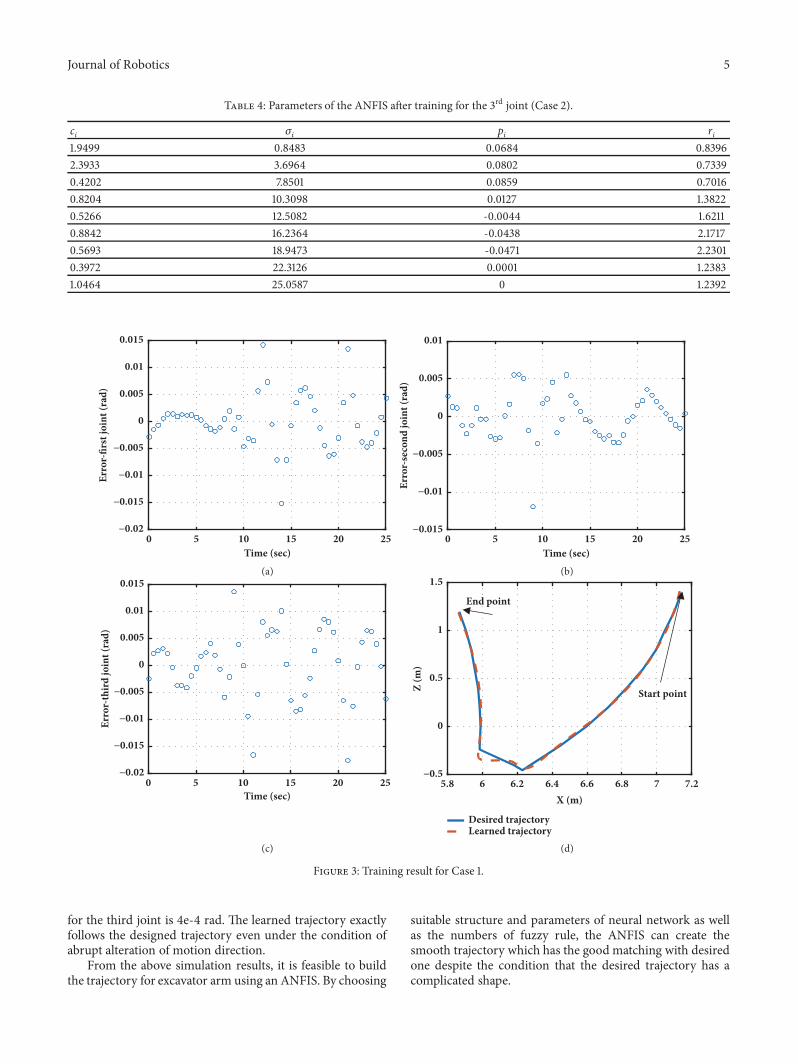
Journal of Robotics 5
Table 4 Parameters of the ANFIS after training for the 3rd joint (Case 2)ci 120590119894 pi ri19499 08483 00684 0839623933 36964 00802 0733904202 78501 00859 0701608204 103098 00127 1382205266 125082 -00044 1621108842 162364 -00438 2171705693 189473 -00471 2230103972 223126 00001 1238310464 250587 0 12392
0 5 10 15 20 25Time (sec)
(a)
(c)
(b)
(d)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-fir
st jo
int (
rad)
0 5 10 15 20 25Time (sec)
minus0015
minus001
minus0005
0
0005
001
Erro
r-se
cond
join
t (ra
d)
0 5 10 15 20 25Time (sec)
minus002
minus0015
minus001
minus0005
0
0005
001
0015
Erro
r-th
ird
join
t (ra
d)
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
Figure 3 Training result for Case 1
for the third joint is 4e-4 rad The learned trajectory exactlyfollows the designed trajectory even under the condition ofabrupt alteration of motion direction
From the above simulation results it is feasible to buildthe trajectory for excavator arm using an ANFIS By choosing
suitable structure and parameters of neural network as wellas the numbers of fuzzy rule the ANFIS can create thesmooth trajectory which has the good matching with desiredone despite the condition that the desired trajectory has acomplicated shape
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
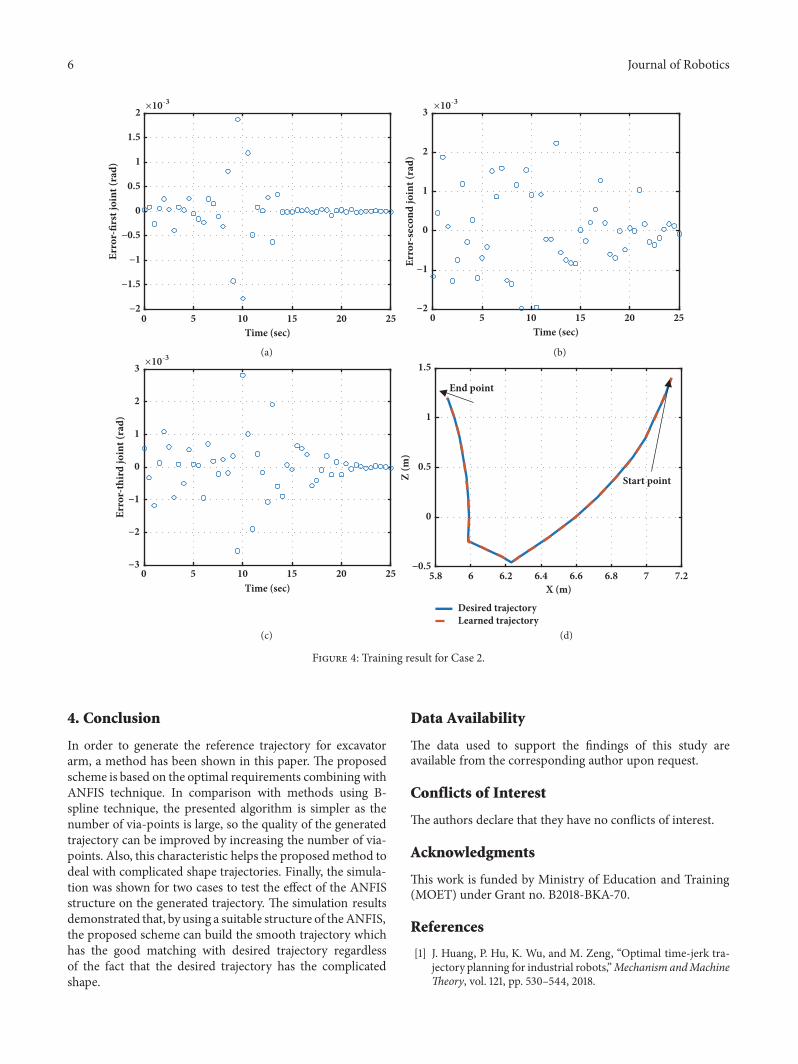
6 Journal of Robotics
0 5 10 15 20 25Time (sec)
minus2
minus15
minus1
minus05
0
05
1
15
2Er
ror-
first
join
t (ra
d)times-
0 5 10 15 20 25Time (sec)
minus2
minus1
0
1
2
3
Erro
r-se
cond
join
t (ra
d)
times-
0 5 10 15 20 25Time (sec)
minus3
minus2
minus1
0
1
2
3
Erro
r-th
ird
join
t (ra
d)
times-
58 6 62 64 66 68 7 72X (m)
minus05
0
05
1
15
Z (m
)
Desired trajectoryLearned trajectory
End point
Start point
(a)
(c)
(b)
(d)
Figure 4 Training result for Case 2
4 Conclusion
In order to generate the reference trajectory for excavatorarm a method has been shown in this paper The proposedscheme is based on the optimal requirements combining withANFIS technique In comparison with methods using B-spline technique the presented algorithm is simpler as thenumber of via-points is large so the quality of the generatedtrajectory can be improved by increasing the number of via-points Also this characteristic helps the proposedmethod todeal with complicated shape trajectories Finally the simula-tion was shown for two cases to test the effect of the ANFISstructure on the generated trajectory The simulation resultsdemonstrated that by using a suitable structure of theANFISthe proposed scheme can build the smooth trajectory whichhas the good matching with desired trajectory regardlessof the fact that the desired trajectory has the complicatedshape
Data Availability
The data used to support the findings of this study areavailable from the corresponding author upon request
Conflicts of Interest
The authors declare that they have no conflicts of interest
Acknowledgments
This work is funded by Ministry of Education and Training(MOET) under Grant no B2018-BKA-70
References
[1] J Huang P Hu K Wu and M Zeng ldquoOptimal time-jerk tra-jectory planning for industrial robotsrdquoMechanism andMachineeory vol 121 pp 530ndash544 2018
Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom

Journal of Robotics 7
[2] A Gasparetto P Boscariol A Lanzutti and R VidonildquoPath planning and trajectory planning algorithms a generaloverviewrdquo Mechanisms and Machine Science vol 29 pp 3ndash272015
[3] Y Guan K Yokoi O Stasse and A Kheddar ldquoOn robotictrajectory planning using polynomial interpolationsrdquo in Pro-ceedings of the 2005 IEEE International Conference on Roboticsand Biomimetics pp 111ndash116 Shatin China July 2005
[4] M Dupac and P Sewell ldquoQuick 3D trajectory planning forrotating extensible manipulators using piecewise polynomialinterpolationrdquo in Proceedings of the Congress on NumericalMethods in Engineering Spain 2017
[5] M Elhoseny A Tharwat and A E Hassanien ldquoBezier CurveBased Path Planning in a Dynamic Field using ModifiedGenetic Algorithmrdquo Journal of Computational Science vol 25pp 339ndash350 2018
[6] S X Yang and M Q-H Meng ldquoReal-time collision-freemotion planning of mobile robots using neural dynamics basedapproachesrdquo IEEE Trans Neural Netw vol 14 no 6 pp 1541ndash1552 2003
[7] A R Willms and S X Yang ldquoReal-time robot path planningvia a distance-propagating dynamic system with obstacle clear-ancerdquo IEEE Transaction on Systems Man and Cybernetics PartB Cybernetics vol 38 no 3 pp 884ndash893 2008
[8] X Yuan and S X Yang ldquoMulti-robot-based nanoassembly plan-ning with automated path generationrdquo IEEEASME Transactionon Mechatronics vol 12 no 3 pp 352ndash356 2007
[9] H Li S X Yang and M L Seto ldquoNeural network basedpath planning for a multirobot system with moving obstaclesrdquoIEEE Transaction on System Man and Cybernetics Part CApplications and Reviews vol 39 no 4 pp 410ndash419 2009
[10] S X Yang and M Meng ldquoNeural network approaches todynamic collision-free trajectory generationrdquo IEEE Transactionon Systems Man and Cybernetics Part B Cybernetics vol 31no 3 pp 302ndash318 2001
[11] D Wang and D Terman ldquoImage segmentation based onoscillatory correlationrdquo Neural Computation vol 9 no 4 pp805ndash836 1997
[12] H Qu S X Yang A R Willms and Z Yi ldquoReal-time robotpath planning based on modified pulse-couple neural networkmodelrdquo IEEE Trans Neural Netw vol 20 no 11 pp 1724ndash17392009
[13] W Xueli G Yapei and Z Jianhua ldquoA novel algorithm forshortest path problem based on pulse couple neural networkrdquoin Proceedings of the Chinese Control and Decision Conferencepp 2468ndash2473 2015
[14] G T Zoumponos and N A Aspragathos ldquoFuzzy logic pathplanning for the robotic placement of fabrics on a work tablerdquoRobotics and Computer-Integrated Manufacturing vol 24 no 2pp 174ndash186 2008
[15] C Son ldquoIntelligent rule-based sequence planning algorithmwith fuzzy optimization for robot manipulation tasks in par-tially dynamic environmentsrdquo Information Sciences vol 342 pp209ndash221 2016
[16] P Sun and Z Yu ldquoTracking control for a cushion robot basedon fuzzy path planning with safe angular velocityrdquo Journal ofAutomatica Sinica vol 4 no 4 pp 610ndash619 2017
[17] G Zhou N Wang X Lu and J Ma ldquoResearch on the fuzzyalgorithm of path planning of mobile robotrdquo in Proceedings ofthe International Conference on Computer System Electronicsand Control China 2017
[18] H Shao H Yamamoto Y Sakaida T Yamaguchi Y Yanag-isawa and A Nozue ldquoAutomatic excavation planning ofhydraulic excavatorrdquo in Proceedings of the International Confer-ence on Intelligent Robotics and Applications 2008
[19] A Stentz J Bares S Singh and P Rowe ldquoA robotic excavatorfor autonomous truck loadingrdquo in Proceedings of the IEEERJSConf on Intelligent Robots and Systems pp 1885ndash1893 VictoriaCanada 1998
[20] Y H Zweiri L D Seneviratne and K Althoefer ldquoModel-basedautomation for heavy duty mobile excavatorrdquo in Proceedings ofthe IEEERSJ International Conference on Intelligent Robots andSystems vol 3 pp 2967ndash2972 October 2002
[21] S Lee D Hong and H Park ldquoOptimal path generationfor excavator with neural networks based soil modelsrdquo inProceedings of the IEEE International Conference onMultisensorFusion and integration for intelligent Systems pp 632ndash637 SeoulKorea 2008
[22] F Y Wang and P J A Lever ldquoOn-Line trajectory planning forautonomous robotic excavation based on forcetorque sensormeasurementsrdquo in Proceedings of the IEEE International Confer-ence onMultisensor Fusion and Integration for Intelligent Systempp 371ndash378 Las Vegas NV USA 1994
[23] Z Li X Li S Liu and L Jin ldquoA study on trajectory planningof hydraulic robotic excavator based on movement stabilityrdquo inProceedings of the 13th International Conference on UbiquitousRobots and Ambient Intelligence URAI pp 582ndash586 August2016
[24] Y B Kim J Ha H Kang P Y Kim J Park and F C ParkldquoDynamically optimal trajectories for earthmoving excavatorsrdquoAutomation in Construction vol 35 pp 568ndash578 2013
[25] A Gasparetto and V Zanotto ldquoA new method for smoothtrajectory planning of robot manipulatorsrdquo Mechanism andMachine eory vol 42 no 4 pp 455ndash471 2007
[26] A Gasparetto and V Zanotto ldquoA technique for time-jerkoptimal planning of robot trajectoriesrdquo Robotics and Computer-Integrated Manufacturing vol 24 no 3 pp 415ndash426 2008
[27] J S R Jang ldquoANFIS adaptive-network-based fuzzy inferencesystemrdquo IEEE Transactions on Systems Man and Cyberneticsvol 23 no 3 pp 665ndash685 1993
[28] A J Koivo M Thoma E Kocaoglan and J Andrade-CettoldquoModeling and control of excavator dynamics during diggingoperationrdquo Journal of Aerospace Engineering vol 9 no 1 pp10ndash18 1996
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom
International Journal of
AerospaceEngineeringHindawiwwwhindawicom Volume 2018
RoboticsJournal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Shock and Vibration
Hindawiwwwhindawicom Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwwwhindawicom
Volume 2018
Hindawi Publishing Corporation httpwwwhindawicom Volume 2013Hindawiwwwhindawicom
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwwwhindawicom Volume 2018
International Journal of
RotatingMachinery
Hindawiwwwhindawicom Volume 2018
Modelling ampSimulationin EngineeringHindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwwwhindawicom Volume 2018
Hindawiwwwhindawicom Volume 2018
Navigation and Observation
International Journal of
Hindawi
wwwhindawicom Volume 2018
Advances in
Multimedia
Submit your manuscripts atwwwhindawicom


















