Adaptive dynamics for Articulated Bodies. Articulated Body dynamics Optimal forward dynamics...
33
Adaptive dynamics for Articulated Bodies
-
date post
19-Dec-2015 -
Category
Documents
-
view
223 -
download
0
Transcript of Adaptive dynamics for Articulated Bodies. Articulated Body dynamics Optimal forward dynamics...
Adaptive dynamics for Articulated Bodies

Articulated Body dynamics
• Optimal forward dynamics algorithm– Linear time complexity– e.g. Featherstone’s DCA
algorithm– Not efficient enough for many
DoF systems
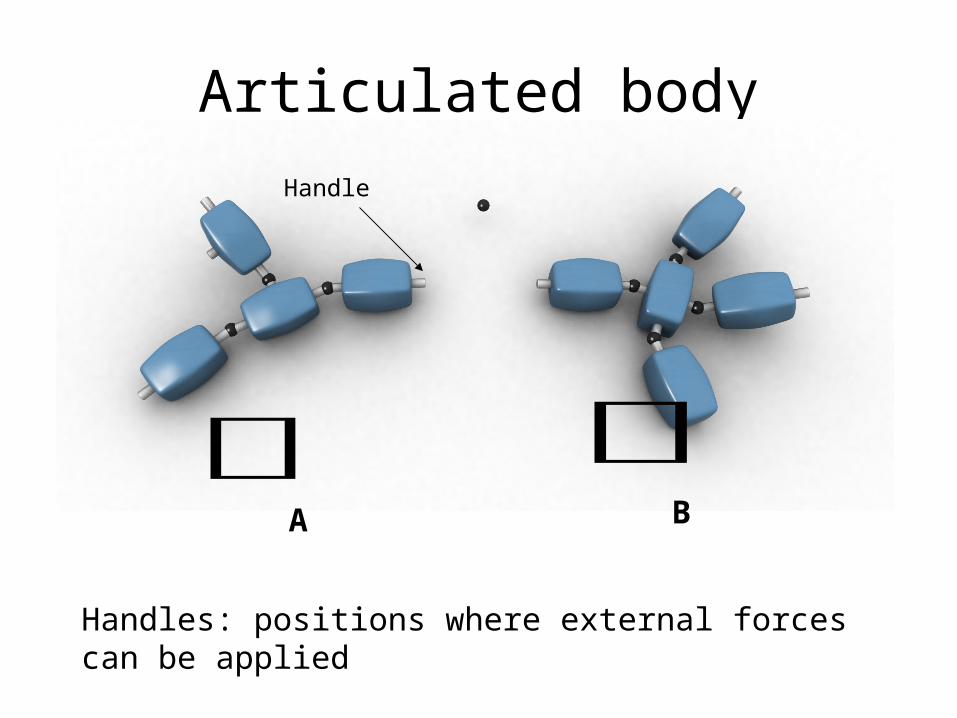
Articulated body
A B
Handles: positions where external forces can be applied
Handle
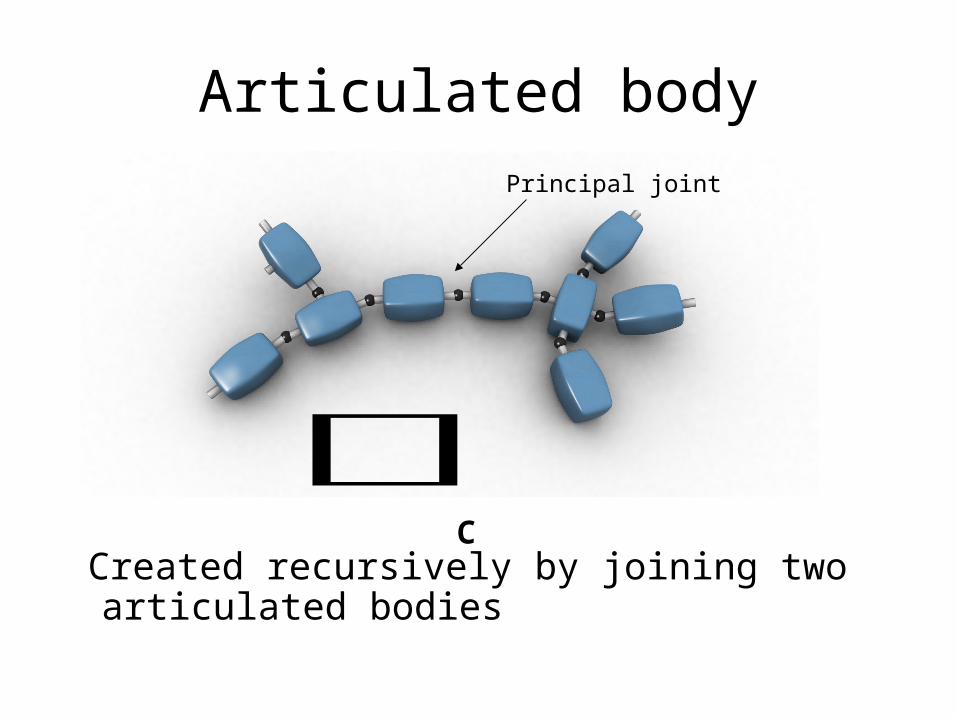
Articulated body
Created recursively by joining two articulated bodies
C
Principal joint
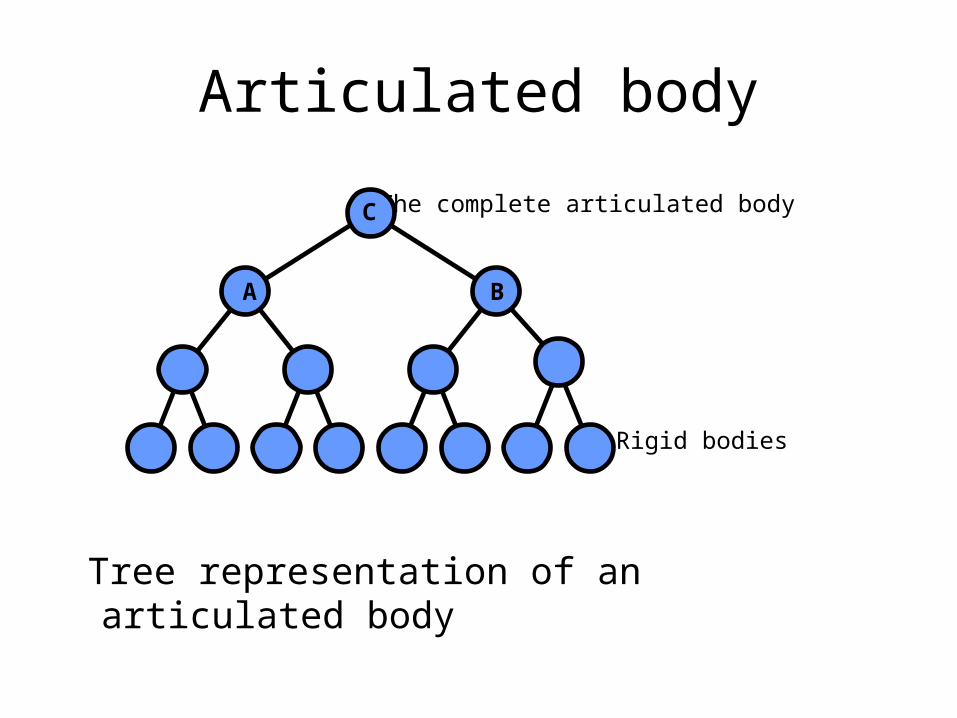
Articulated body
Tree representation of an articulated body
Rigid bodies
The complete articulated bodyC
A B

Featherstone’s DCA
• Articulated-body equation
• Change of in causes a change of in
BodyAccelerations
Inverse inertias and cross-inertias
AppliedForces
Biasaccelerations
jf jij fjf ia
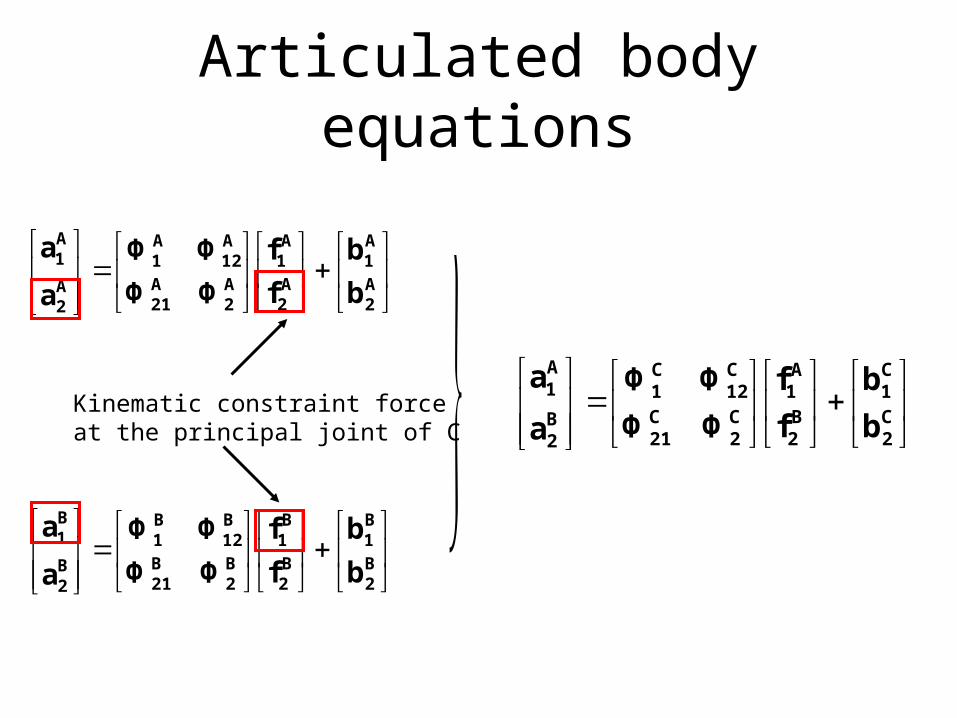
Articulated body equations
A2
A1
A2
A1
A2
A21
A12
A1
A2
A1
b
b
f
f
ΦΦ
ΦΦ
a
a
B2
B1
B2
B1
B2
B21
B12
B1
B2
B1
b
b
f
f
ΦΦ
ΦΦ
a
a
C2
C1
B2
A1
C2
C21
C12
C1
B2
A1
b
b
f
f
ΦΦ
ΦΦ
a
aKinematic constraint forceat the principal joint of C

Featherstone’s DCA Algorithm
• Update body velocity and position
• Main pass: Compute – Bottom-up pass
• Solve articulated body equation by back substitution– Top down pass
C2
C1
C12
C21
C2
C1 b,b,Φ,Φ,Φ,Φ
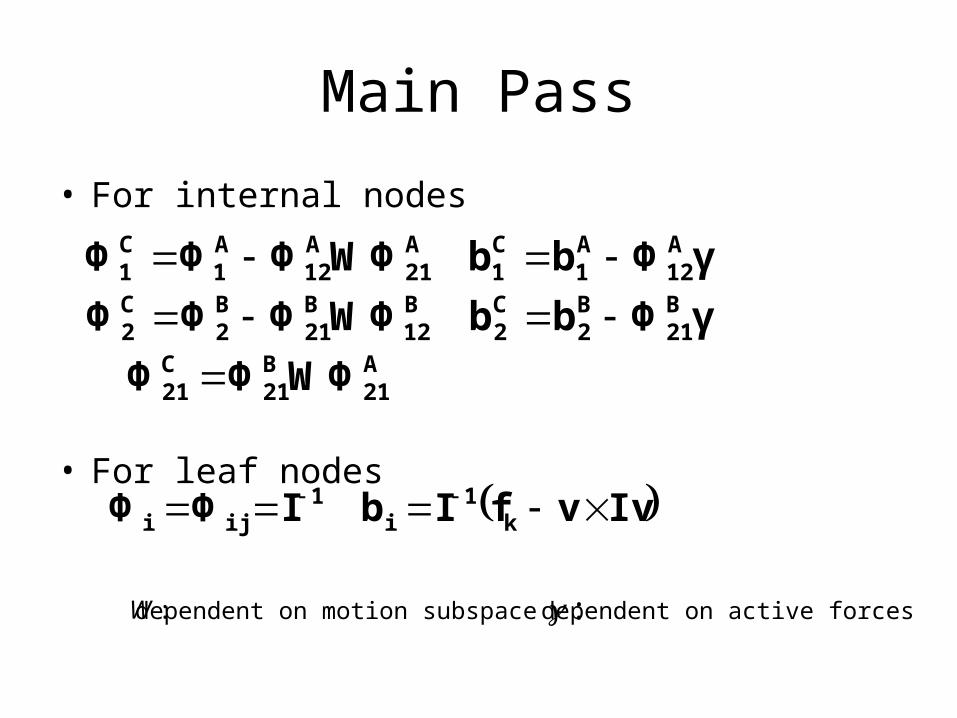
Main Pass
• For internal nodes
• For leaf nodes
IvvfIbIΦΦ k1
i1
iji
A21
B21
C21
B21
B2
C2
B12
B21
B2
C2
A12
A1
C1
A21
A12
A1
C1
WΦΦΦ
γΦbbWΦΦΦΦ
γΦbbWΦΦΦΦ
:W :dependent on motion subspace dependent on active forces

Back substitution
• Receive from parent
• Compute joint acceleration and using
• Send to A and to B
B2
A1 f,f
A2
B1 f,f
A2
A1 f,f
B2
B1 f,f

Adaptive Dynamics
• Simulate n most “important” joints
• Sacrifice amount of accuracy
• Other joints are rigidified
• “Important” and “accuracy” measures based on some motion metric

Hybrid body

Hybrid body
kf

Multilevel forward dynamics algorithm
• Compute body velocity and position only in active region
• Compute – Same as DCA for active nodes– Do not recompute for rigid nodes– (*) Compute in force update region using
• Back substitute only in active region
• Recompute hybrid body (at a different rate than the simulation timestep)
CC b,Φ
CΦCb
BA1BAAACi
C bbΦΦΦbbb
* For the metric we discuss later, this step is not performed

Motion metrics
• Acceleration metric
• Velocity metric
are SPD matrix i.e. metrics correspond to weighted sum of squaresii VA ,

• Theorem The acceleration metric value of an articulated body can be computed before computing its joint accelerations
Computing motion metric

Computing
• In active region compute using:
p,,
p,,
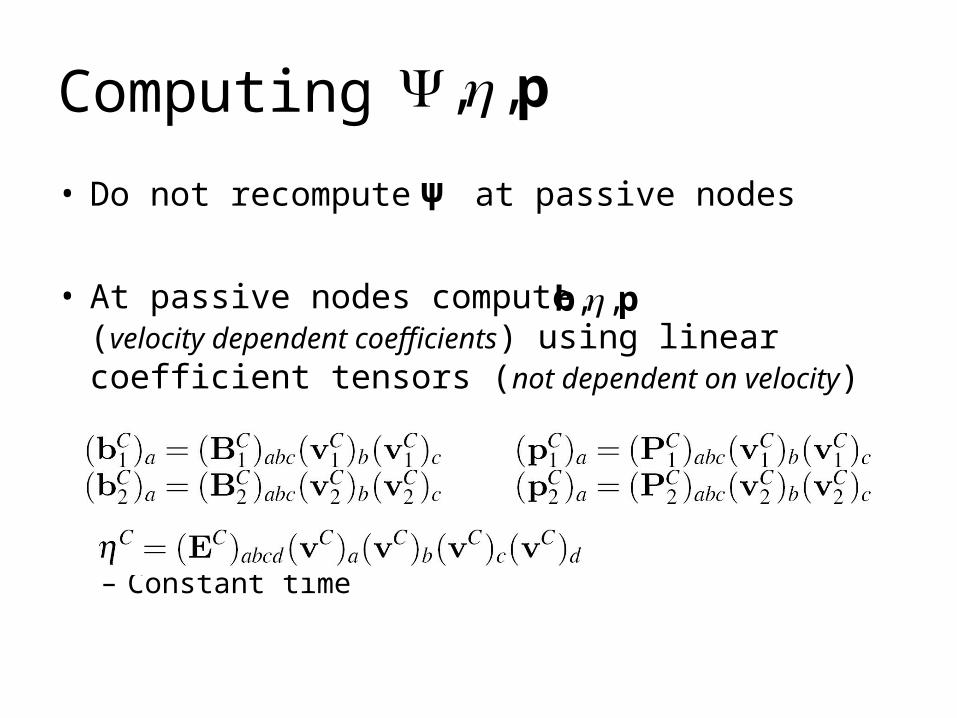
Computing
• Do not recompute at passive nodes
• At passive nodes compute (velocity
dependent coefficients) using linear coefficient tensors (not dependent on velocity)
– Constant time
p,,
pb ,,
Ψ
Computing the hybrid body
• Compute in fully articulated state
• Determine transient hybrid body based on acceleration metric
• Recompute acceleration for transient hybrid body
• Compute velocity metric to determine hybrid body
• Rigidification
pη,Ψ,

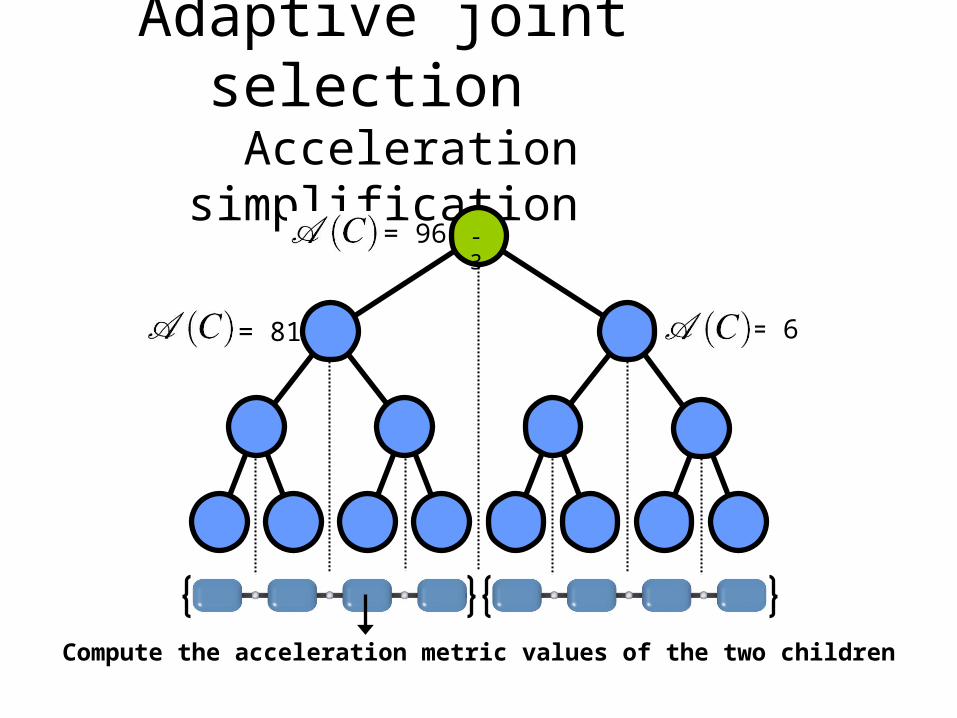
Adaptive joint selection Acceleration simplification
= 96
Compute the acceleration metric value of the root

= 96 -3
Compute the joint acceleration of the root
Adaptive joint selection Acceleration simplification
Adaptive joint selection Acceleration simplification
= 96
= 6 = 81
Compute the acceleration metric values of the two children
-3
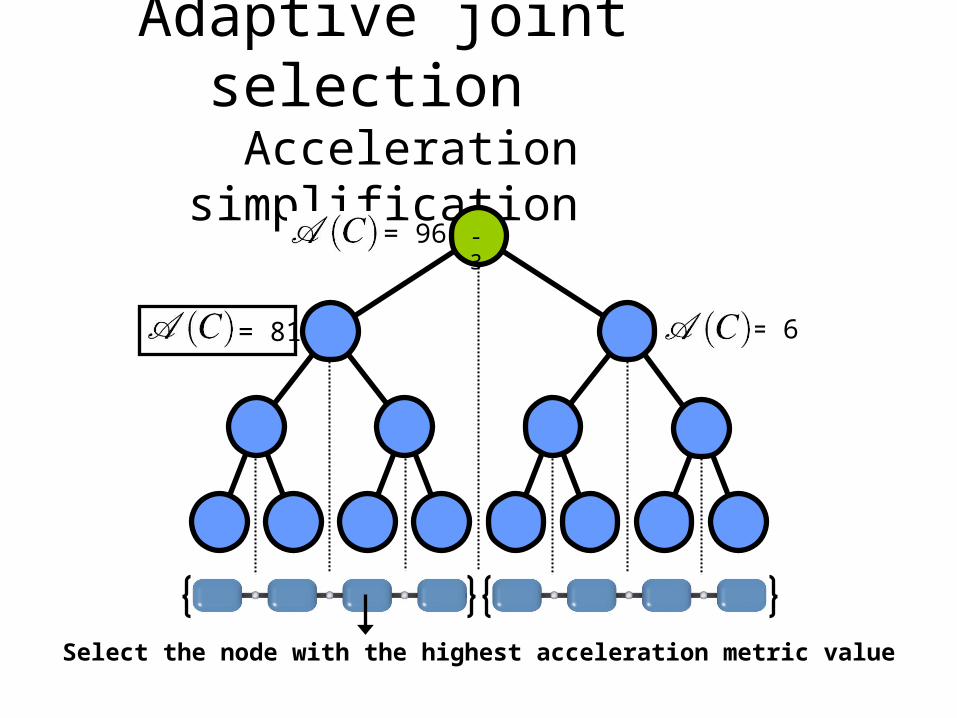
Adaptive joint selection Acceleration simplification
= 96
Select the node with the highest acceleration metric value
-3
= 6 = 81

Adaptive joint selection Acceleration simplification
= 96
Compute its joint acceleration
-3
-6 = 81 = 6
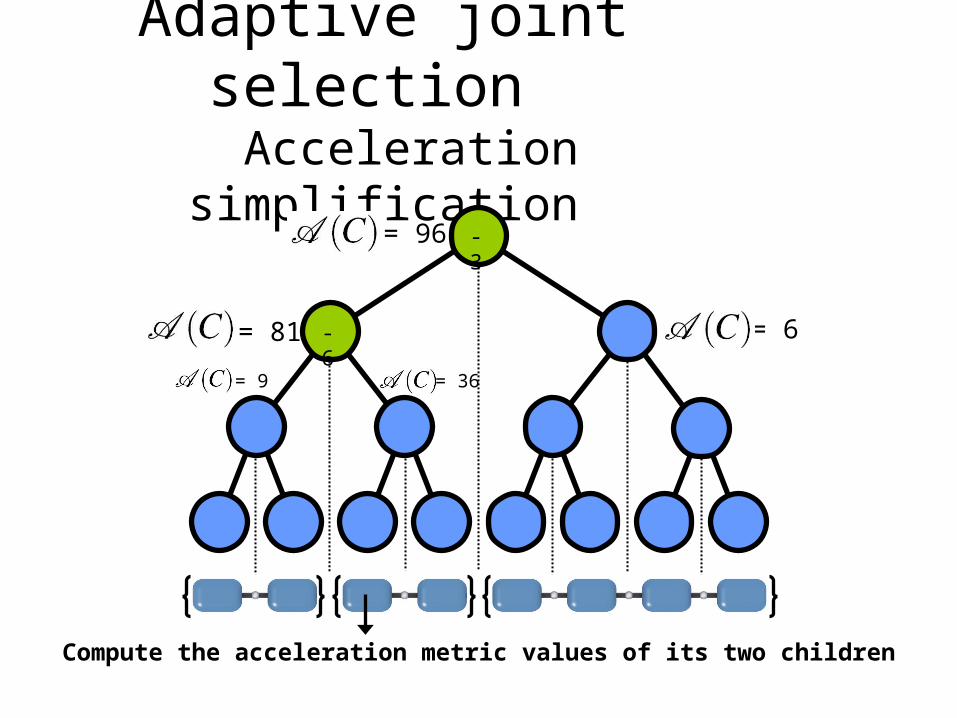
Adaptive joint selection Acceleration simplification
= 96
= 9 = 36
Compute the acceleration metric values of its two children
-3
-6 = 6 = 81

Adaptive joint selection Acceleration simplification
= 96
= 9 = 36
-3
-6 = 6 = 81
Select the node with the highest acceleration metric value
= 36

Adaptive joint selection Acceleration simplification
= 96
= 9 = 36
-3
-6 = 6 = 81
Compute its joint acceleration
6

Adaptive joint selection Acceleration simplification
-3
-6
6
Stop because a user-defined sufficient precision has been reached
= 96
= 9
= 6

Adaptive joint selection Acceleration simplification
-3
-6
6
Four subassemblies with joint accelerations implicitly set to zero
= 96
= 9
= 6
Velocity simplification
• Compute joint velocities in the transient active region (computed using acceleration metric)
• Compute metric in a bottom up manner from the transient rigid front using
• Compute rigid front like for acceleration metric

Rigidification
• Aim: Rigidify the joint velocities to 0
• Constraint:
• Solve for– Compute by computing– Compute
• Apply to the hybrid body
basis vector for
RR vΔv
KQΔvR QK jKe
R1ΔvKQ
Q
je Q
Rv
video

References
• FEATHERSTONE, R. 1999. A divide-and-conquer articulated body algorithm for parallel o(log(n)) calculation of rigid body dynamics. part 1: Basic
algorithm. International Journal of Robotics Research 18(9):867-875.
• S. Redon, N. Galoppo, and M. Lin. Adaptive dynamics of
articulated bodies: ACM Trans. on Graphics (Proc. of ACM SIGGRAPH), 24(3), 2005.