Adaptive Blind Equalization Based on the Minimum Entropy Principle
4
1 Adaptive Blind Equalization Based on the Minimum Entropy Principle Asoke K. Nandi 1 and Shafayat Abrar 2 Department of Electrical Engineering & Electronics 1 The University of Liverpool, Liverpool L69 3GJ, UK 2 COMSATS Institute of Information Technology, Islamabad 44000, Pakistan Abstract—In this article, we introduce the principle of minimum entropy in the context of blindly equalizing a digital communication channel. We discuss how to use this principle to design an inter-symbol- interference sensitive cost for an exemplary amplitude-phase shift-keying signaling. We also discuss the admissibility of the proposed cost and the stability of the derived adaptive algorithm. Index Terms—Adaptive equalization, blind equalization, minimum entropy deconvolution I. I NTRODUCTION A DAPTIVE trained equalization was developed by Lucky for telephone channels [1]. Lucky proposed the so-called zero- forcing method to be applied in FIR equalization. In blind equal- ization, on the other hand, the desired signal is unknown to the receiver, except for its probabilistic or statistical properties over some known alphabets. As both the channel and its input are unknown, the objective of blind equalization is to recover the unknown input sequence based solely on its statistical properties [2]. Historically, the possibility of blind equalization was first discussed by Allen and Mazo in 1974 [3]. They proved analytically that an adjusting equalizer, optimizing the mean-squared sample values at its output while keeping a particular tap anchored at unit value, is capable of inverting the channel without needing a training sequence. The first comprehensive analytical study of the blind equalization problem was presented by Benveniste, Goursat, and Ruget in 1980 [4]. They established that if the transmitted signal is composed of non-Gaussian, independent and identically distributed samples, both channel and equalizer are linear time-invariant filters, noise is negligible, and the probability density functions of transmitted and equalized are equal, then the channel has been perfectly equalized. This mathematical result is very important since it establishes the possibility of obtaining an equalizer with the sole aid of signal’s statistical properties and without requiring any knowledge of the channel impulse response or training data sequence. The second analytical landmark occurred in 1990 when Shalvi and Weinstein significantly simplified the conditions for blind equalization [5]. They showed that the zero-forcing equalization can be achieved if the fourth order cumulant (kurtosis) is maximized and the second order cumulant (energy) remains the same. Before this work, it was usually believed that one need to exploit infinite statistics to ensure zero- forcing equalization. Interestingly, designing a cost function for blind equalization has been more of an art than science; majority of the cost functions tend to be proposed on intuitive grounds and then validated. Due to this reason, a plethora of cost functions for blind equalization is available in literature. On the contrary, the fact is that there exist established methods which facilitate the designing of blind cost functions requiring statistical properties of transmitted and received signals. One of such methods originated in late 70’s in geophysics community who sought to determine the inverse of the channel in seismic data analysis [6], [7] and it was named minimum entropy deconvolution (MED). Later in early 90’s, Satorius and Mulligan em- ployed MED principle and came up with proposals to blindly equalize the communication channels [8]; however, those marvelous signal- specific proposals regrettably failed to receive serious attention. II. MINIMUM ENTROPY DECONVOLUTION PRINCIPLE The MED principle was introduced by Wiggins in seismic data analysis in the year 1977, who sought to determine the inverse channel w † that maximizes the kurtosis of the de- convolved data yn [6]. For seismic data, which are super- Gaussian in nature, he suggested to maximize the cost: J = 1 K ∑ K k=1 |y n−k+1 | 4 /( 1 K ∑ K k=1 |y n−k+1 | 2 ) 2 . This scheme seeks the smallest number of large spikes consistent with the data, thus maxi- mizing the order, or equivalently, minimizing the entropy or disorder in the data [9]. Note that the cost has the statistical form of sample kurtosis and the expression is scale-invariant. Later, Gray generalized it with two degrees of freedom as follows [7]: J (p,q) med ≡ 1 K ∑ K k=1 |y n−k+1 | p 1 K ∑ K k=1 |y n−k+1 | q p q (1) In the context of digital communication where the underlying distri- bution of the transmitted (possibly pulse amplitude modulated) data symbols are closer to a uniform density (sub-Gaussian), we can obtain a blind equalizer by solving: w † = arg min w J (p,q) med , if p > q, arg max w J (p,q) med , if p < q. (2) Note that, in the derivation of (1), it is assumed that the original signal an can be modeled as realization of independent non-Gaussian pro- cess with distribution pA(a; α)= α/(2γΓ(1/α)) exp(−|a| α /γ α ), where signal an is real-valued, α is the shape parameter, γ is the scale parameter, and Γ(·) is the Gamma function. III. MINIMUM ENTROPY (BLIND)EQUALIZATION OF APSK We employ MED principle and use the PDFs of transmitted amplitude-phase shift-keying (APSK) and ISI-affected received signal to design a cost function for blind equalization. Consider a continuous APSK signal, where signal alphabets {aR + aI }∈A are assumed to be uniformly distributed over a circular region of radius Ra and center at the origin. The joint PDF of aR and aI is given by pA(aR + aI )= (πR 2 a ) −1 , a 2 R + a 2 I ≤ Ra, 0, otherwise. (3) Now consider the transformation Y = a 2 R + a 2 I and Θ = ∠(aR,aI ), where Y is the modulus and ∠() denotes the an- gle in the range (0, 2π) that is defined by the point (i, j ). The joint distribution of the modulus Y and Θ can be obtained as pY,Θ(˜ y, ˜ θ)= ˜ y/(πR 2 a ), ˜ y ≥ 0, 0 ≤ ˜ θ< 2π. Since Y and Θ are independent, we obtain a triangular distribution for Y given by
-
Upload
shafayat-abrar -
Category
Documents
-
view
215 -
download
1
description
Abstract—In this article, we introduce the principle of minimum entropy in the context of blindly equalizing a digital communication channel. We discuss how to use this principle to design an inter-symbol interference sensitive cost for an exemplary amplitude-phase shift-keying signaling. We also discuss the admissibility of the proposed cost and the stability of the derived adaptive algorithm. Index Terms—Adaptive equalization, blind equalization, minimum entropy deconvolution
Transcript of Adaptive Blind Equalization Based on the Minimum Entropy Principle

1
Adaptive Blind Equalization Based on theMinimum Entropy Principle
Asoke K. Nandi1 and Shafayat Abrar2Department of Electrical Engineering & Electronics
1The University of Liverpool, Liverpool L69 3GJ, UK2COMSATS Institute of Information Technology, Islamabad 44000, Pakistan
Abstract—In this article, we introduce the principle of minimumentropy in the context of blindly equalizing a digital communicationchannel. We discuss how to use this principle to design an inter-symbol-interference sensitive cost for an exemplary amplitude-phase shift-keyingsignaling. We also discuss the admissibility of the proposed cost and thestability of the derived adaptive algorithm.
Index Terms—Adaptive equalization, blind equalization, minimumentropy deconvolution
I. I NTRODUCTION
A DAPTIVE trained equalizationwas developed by Lucky fortelephone channels [1]. Lucky proposed the so-called zero-
forcing method to be applied in FIR equalization. Inblind equal-ization, on the other hand, the desired signal is unknown to thereceiver, except for its probabilistic or statistical properties over someknown alphabets. As both the channel and its input are unknown,the objective of blind equalization is to recover the unknown inputsequence based solely on its statistical properties [2]. Historically,the possibility of blind equalization was first discussed byAllenand Mazo in 1974 [3]. They proved analytically that an adjustingequalizer, optimizing the mean-squared sample values at its outputwhile keeping a particular tap anchored at unit value, is capable ofinverting the channel without needing a training sequence.
The first comprehensive analytical study of the blind equalizationproblem was presented by Benveniste, Goursat, and Ruget in 1980[4]. They established that if the transmitted signal is composedof non-Gaussian, independent and identically distributedsamples,both channel and equalizer are linear time-invariant filters, noise isnegligible, and the probability density functions of transmitted andequalized are equal, then the channel has been perfectly equalized.This mathematical result is very important since it establishes thepossibility of obtaining an equalizer with the sole aid of signal’sstatistical properties and without requiring any knowledge of thechannel impulse response or training data sequence. The secondanalytical landmark occurred in 1990 when Shalvi and Weinsteinsignificantly simplified the conditions for blind equalization [5]. Theyshowed that the zero-forcing equalization can be achieved if thefourth order cumulant (kurtosis) is maximized and the second ordercumulant (energy) remains the same. Before this work, it wasusuallybelieved that one need to exploit infinite statistics to ensure zero-forcing equalization.
Interestingly, designing a cost function for blind equalization hasbeen more of an art than science; majority of the cost functionstend to be proposed on intuitive grounds and then validated.Dueto this reason, a plethora of cost functions for blind equalizationis available in literature. On the contrary, the fact is thatthereexist established methods which facilitate the designing of blind costfunctions requiring statistical properties of transmitted and receivedsignals. One of such methods originated in late 70’s in geophysicscommunity who sought to determine the inverse of the channelinseismic data analysis [6], [7] and it was namedminimum entropy
deconvolution(MED). Later in early 90’s, Satorius and Mulligan em-ployed MED principle and came up with proposals to blindly equalizethe communication channels [8]; however, those marveloussignal-specificproposals regrettably failed to receive serious attention.
II. M INIMUM ENTROPY DECONVOLUTION PRINCIPLE
The MED principle was introduced by Wiggins in seismicdata analysis in the year 1977, who sought to determine theinverse channelw† that maximizes thekurtosis of the de-convolved data yn [6]. For seismic data, which are super-Gaussian in nature, he suggested to maximize the cost:J =1K
∑K
k=1 |yn−k+1|4/( 1K
∑K
k=1 |yn−k+1|2)2. This scheme seeks thesmallest number of large spikes consistent with the data, thus maxi-mizing the order, or equivalently,minimizing the entropy or disorderin the data [9]. Note that the cost has the statistical form ofsamplekurtosis and the expression is scale-invariant. Later, Gray generalizedit with two degrees of freedom as follows [7]:
J(p,q)med ≡
1K
∑K
k=1 |yn−k+1|p(
1K
∑K
k=1 |yn−k+1|q) p
q
(1)
In the context of digital communication where the underlying distri-bution of the transmitted (possibly pulse amplitude modulated) datasymbols are closer to a uniform density (sub-Gaussian), we can obtaina blind equalizer by solving:
w† =
argmin
wJ(p,q)med , if p > q,
argmaxw
J(p,q)med , if p < q.
(2)
Note that, in the derivation of (1), it is assumed that the original signalan can be modeled as realization of independent non-Gaussian pro-cess with distributionpA(a;α) = α/(2γΓ(1/α)) exp(−|a|α/γα),where signalan is real-valued,α is the shape parameter,γ is thescale parameter, andΓ(·) is the Gamma function.
III. M INIMUM ENTROPY (BLIND ) EQUALIZATION OF APSK
We employ MED principle and use the PDFs of transmittedamplitude-phase shift-keying (APSK) and ISI-affected received signalto design a cost function for blind equalization. Consider acontinuousAPSK signal, where signal alphabets{aR + aI} ∈ A are assumedto be uniformly distributed over a circular region of radiusRa andcenter at the origin. The joint PDF ofaR andaI is given by
pA(aR + aI) =
{(πR2
a)−1,
√a2R + a2
I ≤ Ra,0, otherwise.
(3)
Now consider the transformationY =√
a2R + a2
I and Θ =∠(aR, aI), where Y is the modulus and∠() denotes the an-gle in the range(0, 2π) that is defined by the point(i, j). Thejoint distribution of the modulusY and Θ can be obtained aspY,Θ(y, θ) = y/(πR2
a), y ≥ 0, 0 ≤ θ < 2π. Since Y and Θare independent, we obtain a triangular distribution forY given by

pY(y : H0) = 2y/R2a, y ≥ 0, whereH0 denotes the hypothesis that
signal is distortion-free.Let Yn,Yn−1, · · · ,Yn−K+1 be a sequence of sizeK, obtained
by taking modulus of randomly generated distortion-free signalalphabetsA, where subscriptn indicates discrete time index.Let Z1,Z2, · · · ,ZK be the order statistic of sequence{Y}. LetpY(yn, ..., yn−K+1 : H0) be anK-variate density under the hy-pothesisH0. Incorporating scale-invariancy, we obtain
p∗Y(yn, ..., yn−K+1 :H0) =
∫ ∞
0
pY(λyn, ..., λyn−K+1 :H0)λK−1dλ
=2K−1
K (zK)2K
K∏
k=1
yn−k+1,
(4)where z1, z2, ..., zK are the order statistic of elementsyn, ..., yn−K+1, so that z1 = min{y} and zK = max{y}.Now consider the alternative (H1) that signal suffers with multi-pathinterference as well as with additive Gaussian noise. The in-phaseand quadrature components of the received signal are modeled asnormal distributed (owing to central limit theorem). It means thatthe modulus of the received signal follows Rayleigh distribution,
pY(y : H1) =y
σ2y
exp
(− y2
2σ2y
), y ≥ 0, σy > 0. (5)
TheK-variate densityp∗Y(yn, · · · , yn−K+1 : H1) is obtained as
p∗Y(yn, yn−1, · · · , yn−K+1 : H1)
=
∏K
k=1 yn−k+1
σ2Ky
∫ ∞
0
exp
(
−λ2∑K
k′=1 y2n−k′+1
2σ2y
)
λ2K−1 dλ
=2K−1Γ (K)
∏K
k=1 yn−k+1(∑K
k=1 y2n−k+1
)K
(6)The scale-invariant rank-discrimination uniformly most powerful testof p∗Y(yn, ..., yn−K+1 :H0) againstp∗Y(yn, ..., yn−K+1 :H1) is [10]
O(yn) =p∗Y(yn, ..., yn−K+1 :H0)
p∗Y(yn, ..., yn−K+1 :H1)=
1
K!
[∑K
k=1 y2n−k+1
z2K
]KH0
≷H1
C
(7)whereC is some threshold. Assuming largeK, we can approximate1K
∑K
k=1 y2n−k+1 ≈ E
[|yn|2
]. It helps obtaining a statistical cost for
the blind equalization of APSK signal as follows:
w† = argmax
w
E[|yn|2
]
(max {|yn|})2(8)
Maximizing (8) can be interpreted as determining the equalizer coef-ficients,w, which drives the distribution of its output,yn, away fromGaussian distribution toward uniform, thus removing successfully theinterference from the received APSK signal.
A. Admissibility of the proposed cost
The cost (8) demands maximizing equalizer output energy whileminimizing the largest modulus. Since the largest modulus of trans-mitted signalan is Ra, incorporating thisa priori knowledge, theunconstrained cost (8) can be written in a constrained form as follows:
w† = argmax
wE[|yn|2
]s.t. max {|yn|} ≤ Ra . (9)
By incorporating Ra, it would be possible to recover the trueenergy of signalan upon successful convergence. We note thatthe cost (9) is quadratic, and the feasible region (constraint) is aconvex set. The problem, however, is non-convex and may have
multiple local maxima. Nevertheless, we have the followingtheorem:
Theorem: Assumew† is a local optimum in (9), andt† is the
corresponding total channel-equalizer impulse-responseand additivenoise is negligible. Then it holds|tl| = δl−l† .
Proof: Without loss of generality we assume that the channel andequalizer are real-valued, we obtainmax{|yn|} = Ra
∑l |tl| and
E[|yn|2
]= σ2
a
∑l |tl|2, whereσ2
a = E[|a|2]. We re-write (9) as
given byw† = argmaxw∑
l t2l s.t.
∑l |tl| ≤ 1. Now consider the
following quadratic problem int domain
t† = argmax
t
∑
l
t2l s.t.∑
l
|tl| ≤ 1 . (10)
Assume t(f) is a feasible solution to (10). We have
∑l t
2l ≤
(∑
l |tl|)2 ≤ 1; where the equality is achieved if and only if all crossterms in (
∑l |tl|)2 =
∑l t
2l +
∑l1
∑l2, l2 6=l1
|tl1 tl2 | are zeros.Now assume thatt(k) is a local optimum of (10), i.e., this propositionholds ∃ ε > 0, ∀ t(f), ‖t(f) − t
(k)‖2 ≤ ε ⇒ ∑l(t
(k)l )2 ≥∑
l(t(f)l )2. Supposet(k) does not satisfy theTheorem. Consider
t(c) defined byt(c)l1
= t(k)l1
+ ε/√2, t
(c)l2
= t(k)l2
− ε/√2, andt(c)l =
t(k)l , l 6= l1, l2. We also assume thatt(k)l2
< t(k)l1
. Next, we have
‖t(c)−t(k)‖2 = ε, and
∑l |t
(c)l | =∑l |t
(k)l | ≤ 1. However, one can
observe that∑
l(t(k)l )2 −∑l(t
(c)l )2 =
√2ε(t(k)l2
− t(k)l1
)− ε2 < 0,
which meanst(k) is not a local optimum to (10). This counterexampleshows that all local maxima of (10) satisfy theTheorem.
B. Adaptive optimization of the proposed cost
For a stochastic gradient-based adaptive implementation of (9),we need to modify it to involve adifferentiableconstraint; one of thepossibilities is
w† = argmax
wE[|yn|2
]s.t. fmax(Ra, |yn|) = Ra , (11)
where we have used the following identity (belowa, b ∈ C):
fmax(|a|, |b|) ≡∣∣|a|+ |b|
∣∣ +∣∣|a| − |b|
∣∣2
=
{|a|, if |a| ≥ |b||b|, otherwise.
(12)The functionfmax is differentiable, viz
∂ fmax(|a|, |b|)∂a∗
=
{a/(2|a|), if |a| > |b|0, if |a| < |b| (13)
In [11], we have solved the problem (11) and obtained the followinggradient-based adaptive algorithm:
wn+1 = wn + µ f(yn) y∗n xn,
where f(yn) =
{1, if |yn| ≤ Ra
−β, if |yn| > Ra
(14)
In (14), β = (2Mσ2a/(MLR
2a) − 1), whereM is the total number
of distortion-free signal alphabets (complex symbols) andMa is thenumber of complex symbols on the modulusRa. We denote thealgorithm (14) asBeta Constant Modulus Algorithm(βCMA).
C. Stability of the derived adaptive algorithm
In this Section, we carry out a deterministic stability analysis ofβCMA for a bounded magnitude received signal. The analysis relieson the analytical framework of [12]. We shall assume that we updatethe equalizer only when its output amplitude is higher than certainthreshold; we stop the update otherwise. In our analysis, weassume

that the threshold isRa. So we only consider those updates when|yn| > Ra; we denote the active update steps with indexk.
We study the following form:wk+1 = wk + µkΦ∗kxk, Φk 6=
0, k = 0, 1, 2, · · ·, whereΦk ≡ Φ(yk) = f(yk)yk. Let w∗ denotevector of the optimal equalizer and letzk = w
H∗ xk = ak−δ is the
optimal output so that|zk| = Ra. Define thea priori anda posterioriestimation errorsea
k := zk − yk = wHk xk and ep
k := zk − sk =w
Hk+1xk, wherewk = w∗ −wk. We assume that|ea
k| is small andequalizer is operating in the vicinity ofw∗. We introduceξ(x, y):
ξ(x, y) :=Φ(y)− Φ(x)
x− y=
f(y) y − f(x) x
x− y, (x 6= y) (15)
Using ξ(x, y) and simple algebra, we obtainΦk = f(yk) yk =ξ(zk, yk)e
ak and ep
k = (1− µkξ(zk, yk)/µk)eak, where µk =
‖xk‖−2. For the stability of adaptation, we require|epk| < |ea
k|; toensure it, we require to guarantee|1− µkξ(zk, yk)/µk| < 1, ∀ k, zkand yk. Now we require to prove that the real part of the functionξ(zk, yk) defined by (15) is positive and bounded from below. Recallthat |zk| = Ra and|yk| > Ra. We start by writingzk/yk = rejφ forsomer < 1 and for someφ ∈ [0, 2π). Then expression (15) leads to
ξ(zk, yk) =
(=−β)︷ ︸︸ ︷f(yk) yk −
(=0)︷ ︸︸ ︷f(zk) zk
zk − yk=
β ykyk − zk
=β
1− rejφ.
(16)
It is important for our purpose to verify whether the real part ofβ/(1− rejφ) is positive. For any fixed value ofr, we allow the angleφ to vary from zero to2π, then the termβ/(1− rejφ) describes acircle in the complex plane whose least positive value isβ/(1 + r),obtained forφ = π, and whose most positive value isβ/(1− r),obtained forφ = 0. This shows that forr ∈ (0, 1), the real part ofthe functionξ(zk, yk) lies in the interval
β
1 + r≤ ξR(zk, yk) ≤
β
1− r(17)
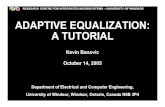
Referring to Fig. 1, note that the functionξ(zk, yk) assumes valuesthat lie inside a circle in the right-half plane. From this figure, wecan obtain the following bound for the imaginary part ofξ(zk, yk)(that isξI(zk, yk)):
− β r
1− r2≤ ξI(zk, yk) ≤
β r
1− r2. (18)
Let A andB be any two positive numbers satisfying
A2 +B2 < 1. (19)
We need to find aµk that satisfies|µkξI(zk, yk)/µk| < A ⇒µk < Aµk/|ξI(zk, yk)| and |1− µkξR(zk, yk)/µk| < B ⇒ µk >(1−B)µk/ξR(zk, yk) Combining these results, we obtain
0 <(1−B)µk
ξR(zk, yk)< µk <
Aµk
|ξI(zk, yk)|< 1 (20)
Using the extremum values ofξR(zk, yk) andξI(zk, yk), we obtain
(1 + r)(1−B)
β ‖xk‖2< µk <
(1− r2)A
β r‖xk‖2(21)
We need to guarantee that the upper bound in the above expressionis larger than the lower bound. This can be achieved by choosing{A,B} properly such that
0 < (1−B) <
(1− r
r
)A < 1 (22)
From our initial assumptions that the equalizer is in the vicinity ofopen-eye solution and|yk| > Ra, we know thatr < 1. Note that for0.5 ≤ r < 1 we havefr ≤ 1.
Let {Ao, Bo} be such that(1−Bo) = ρAo, where0 < ρ < 1.To satisfy (22), we need0.5 ≤ r < 1 andρ < (1− r)/r. From (19),Bo must be such that(1−Bo)
2 ρ−2 + B2o < 1 which reduces to
the following quadratic inequality inBo:(1 + ρ−2
)B2
o −2ρ−2Bo+(ρ−2 − 1
)< 0. If we find a Bo that satisfies this inequality, then
a pair {Ao, Bo} satisfying (19) and (22) exists. So consider thequadratic functionfB :=
(1 + ρ−2
)B2−2ρ−2B+
(ρ−2 − 1
). It has
a negative minimum and it crosses the real axis at the positive rootsB(1) =
(1− ρ2
)/(1 + ρ2
), andB(2) = 1. This means that there
exist many values ofB, between the roots, at which the quadraticfunction inB evaluates to negative values.
Hence,Bo falls in the interval(1− ρ2)/(1 + ρ2) < Bo < 1; itfurther givesAo = 2ρ/
(1 + ρ2
). Using{Ao, Bo}, we obtain
3ρ2
β (1 + ρ2) ‖xk‖2< µk <
3ρ
β (1 + ρ2) ‖xk‖2(23)
Note that,argminρ ρ2/(1 + ρ2) = 0, andargmaxρ ρ/(1 + ρ2) =
1. So makingρ = 0 and ρ = 1 in the lower and upper bounds,respectively, and replacing‖xk‖2 with E[‖xk‖2], we find the widest
stochastic stability bound onµk as 0 < µ < 3/(2β E[‖xk‖2]) . Thesignificance of this result is that it can easily be measured from theequalizer input samples. In adaptive filter theory, it is convenient toreplaceE[‖xk‖2] with trace(R), whereR = E[xkx
Hk ]. Note that,
when noise is negligible and channel coefficients are normalized, wecan writetrace(R) = Nσ2
a; N is the equalizer length. Finally, thestochastic bound for the range of step-size forβCMA is given by
0 < µ <3
2βNσ2a
(24)
-
6
(0, 0)s s s
s
s
ξI
ξR
(β
1 + r, 0
)��7 (
β
1− r, 0
)SSo(β
1− r2, 0
)AAK
(β
1− r2,
βr
1− r2
)AAK
Fig. 1. Plot ofξ(zk, yk) for arbitraryβ, r andφ ∈ [0, 2π).
IV. SIMULATION RESULTS
In this Section, we compareβCMA with traditional constantmodulus algorithm (CMA) [13] and Shtrom-Fan algorithm (SFA)[14], which are expressed as follows:
CMA : wn+1 = wn + µ(Rcm − |yn|2
)y∗nxn, (25)
SFA : wn+1 = wn + µ
(Rcm
σ2a
E[|yn|2]− |yn|2)y∗nxn. (26)
whereRcm = E[|a|4]/σ2a is a constant andE[|yn|2] is an iterative
estimate of the energy of deconvolved sequence as obtained by:
E[|yn+1|2] = E[|yn|2] + n−1(|yn|2 − E[|yn|2]).
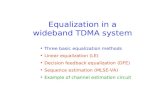
We consider transmission of amplitude-phase shift-keying(APSK)signals over a complex voice-band channel (channel-1), taken from[15], and evaluate the average ISI traces at SNR = 30dB. We employa seven-tap equalizer with central spike initialization and use 8-and 16-APSK signalling. Step-sizes have been selected suchthat all

algorithms reached steady-state requiring same number of iterations.The parameterβ is 1.535 for 8-APSK and it is 1.559 for 16-APSK.Simulation results are depicted in Fig. 2. We can note that theβCMAperformed better than CMA and SFA and yielded much lower steady-state ISI floor. Also, SFA performed slightly better than CMA.
0 500 1000 1500 2000 2500 3000 3500 4000−28
−24
−20
−16
−12
−8
Iterations
Residual ISI [dB] traces 8.APSK: SNR = 30dB
CMA: µ = 8E−4 SFA: µ = 7E−4 βCMA: µ = 6E−4, β = 1.53
−2 0 2−2
0
2Test signal SFACMA
βCMA
a)
0 500 1000 1500 2000 2500 3000 3500 4000−28
−24
−20
−16
−12
−8
Iterations
Residual ISI [dB] traces 16.APSK: SNR = 30dB CMA: µ = 1.5E−4 SFA: µ = 1.3E−4
βCMA: µ = 3E−4, β = 1.55
−3 0 3−3
0
3Test signal
βCMA
CMA SFA
b)
Fig. 2. Residual ISI: a) 8-APSK and b) 16-APSK. The inner and outermoduli of 8-APSK are 1.000 and 1.932, respectively. And the inner and outermoduli of 16-APSK are 1.586 and 3.000, respectively. The energies of 8-APSK and 16-APSK are 2.366 and 5.757, respectively.
Next we validate the stability bound (24). Here we consider asecond complex channel (as channel-2) taken from [16]. In allcases, the simulations were performed withNit = 104 iterations,Nrun = 100 runs, and no noise. In Fig. 3, we plot the probability ofdivergence (Pdiv) for three different equalizer lengths, against thenormalized step-size,µnorm = µ/µbound. The Pdiv is estimatedas Pdiv = Ndiv/Nrun, whereNdiv indicates the number of timesequalizer diverged. Equalizers were initialized close to zero-forcingsolution. It can be seen that the bound does guarantee a stableperformance whenµ < µbound.
V. CONCLUSIONS
The key challenge of adaptive blind equalizers lies in the designof special cost functions whose minimization or maximization resultsin the removal of inter-symbol interference. Based on minimumentropy principle, we described the idea of designing specific costfunction for the blind equalization of given transmitted signal. Wepresented a case study of amplitude-phase shift-keying forwhicha cost is derived and corresponding adaptive algorithm is obtained.We addressed the admissibility of the proposed cost and stability ofthe derived algorithm. The blind equalizer implementing the derivedalgorithm is shown to possess better convergence behavior comparedto two existing (constant modulus) equalizers.
1 1.1 1.2 1.3 1.4 1.50
0.2
0.4
0.6
0.8
1
µ_norm
P_d
iv
8APSK
N = 7
N = 17
N = 27
Channel 2 [KD]Channel 1 [PP]
a)
1 1.1 1.2 1.3 1.4 1.50
0.2
0.4
0.6
0.8
1
µ_norm
P_d
iv
16APSK
N = 7
N = 17
N = 27
Channel 2 [KD]Channel 1 [PP]
b)
Fig. 3. Probability of divergence on channel-1 and channel-2 with threeequalizer lengths, no noise,Nit = 104 iterations andNrun = 100 runs fora) 8-APSK and b) 16-APSK.
REFERENCES
[1] R.W. Lucky. Automatic equalization for digital communication. TheBell Systems Technical Journal, XLIV(4):547–588, 1965.
[2] C.R. Johnson, Jr., P. Schniter, T.J. Endres, J.D. Behm, D.R. Brown, andR.A. Casas. Blind equalization using the constant modulus criterion: Areview. Proc. IEEE, 86(10):1927–1950, 1998.
[3] J.B. Allen and J.E. Mazo. A decision-free equalization scheme forminimum-phase channels.IEEE Trans. Commun., 22(10):1732–1733,1974.
[4] A. Benveniste, M. Goursat, and G. Ruget. Robust identification of anonminimum phase system: Blind adjustment of a linear equalizer indata communication.IEEE Trans. Automat. Contr., 25(3):385–399, 1980.
[5] O. Shalvi and E. Weinstein. New criteria for blind equalization of non-minimum phase systems.IEEE Trans. Inf. Theory, 36(2):312–321, 1990.
[6] R.A. Wiggins. Minimum entropy deconvolution. Proc. Int. Symp.Computer Aided Seismic Analysis and Discrimination, 1977.
[7] W. Gray. Variable Norm Deconvolution. PhD thesis, Stanford Univ.,1979.
[8] E.H. Satorius and J.J. Mulligan. An alternative methodology for blindequalization.Dig. Sig. Process.: A Review Jnl., 3(3):199–209, 1993.
[9] A.T. Walden. Non-Gaussian reflectivity, entropy, and deconvolution.Geophysics, 50(12):2862–2888, Dec. 1985.
[10] Z. Sidak, P.K. Sen, and J. Hajek.Theory of Rank Tests. Academic Press;2/e, 1999.
[11] S. Abrar and A.K. Nandi. Adaptive minimum entropy equalizationalgorithm. IEEE Commun. Lett., 14(10):966–968, 2010.
[12] M. Rupp and A. H. Sayed. On the convergence analysis of blindadaptive equalizers for constant modulus signals.IEEE Trans. Commun.,48(5):795–803, May 2000.
[13] D.N. Godard. Self-recovering equalization and carrier tracking in two-dimensional data communications systems.IEEE Trans. Commun.,28(11):1867–1875, 1980.
[14] V. Shtrom and H.H. Fan. New class of zero-forcing cost functions inblind equalization.IEEE Trans. Sig. Process., 46(10):2674, 1998.
[15] G. Picchi and G. Prati. Blind equalization and carrier recovery usinga ‘stop-and-go’ decision-directed algorithm.IEEE Trans. Commun.,35(9):877–887, 1987.
[16] R.A. Kennedy and Z. Ding. Blind adaptive equalizers forquadratureamplitude modulated communication systems based on convexcostfunctions. Opt. Eng., 31(6):1189–1199, 1992.