ACTUATORS - Laboratory for Perceptual Roboticsgrupen/603/slides/ACTUATORS.pdf · Artificial...
23
Actuators ...physical devices that transform electrical, chemical, or thermal energy into mechanical energy... • muscle • electric – stepper motors – permanent magnet DC motors • hydraulic • pneumatic • artificial muscles – shape memory alloys – polymers – protein-based actuators – bucky tubes 1 Copyright c 2015 Roderic Grupen
Transcript of ACTUATORS - Laboratory for Perceptual Roboticsgrupen/603/slides/ACTUATORS.pdf · Artificial...

Actuators
...physical devices that transform electrical, chemical, or thermalenergy into mechanical energy...
• muscle
• electric
– stepper motors
– permanent magnet DCmotors
• hydraulic
• pneumatic
• artificial muscles
– shape memory alloys
– polymers
– protein-based actuators
– bucky tubes
1 Copyright c©2015 Roderic Grupen

Muscle: Contractile Proteins
LMM
HMM
DTNB A−1, A−2segments
HMM S−1
HMM S−2
A1500
[adapted from Wilkie 1974, McMahon 1984]
Myosin molecules consist of multiple molecular subchains that par-ticipate in specialized roles.
2 Copyright c©2015 Roderic Grupen
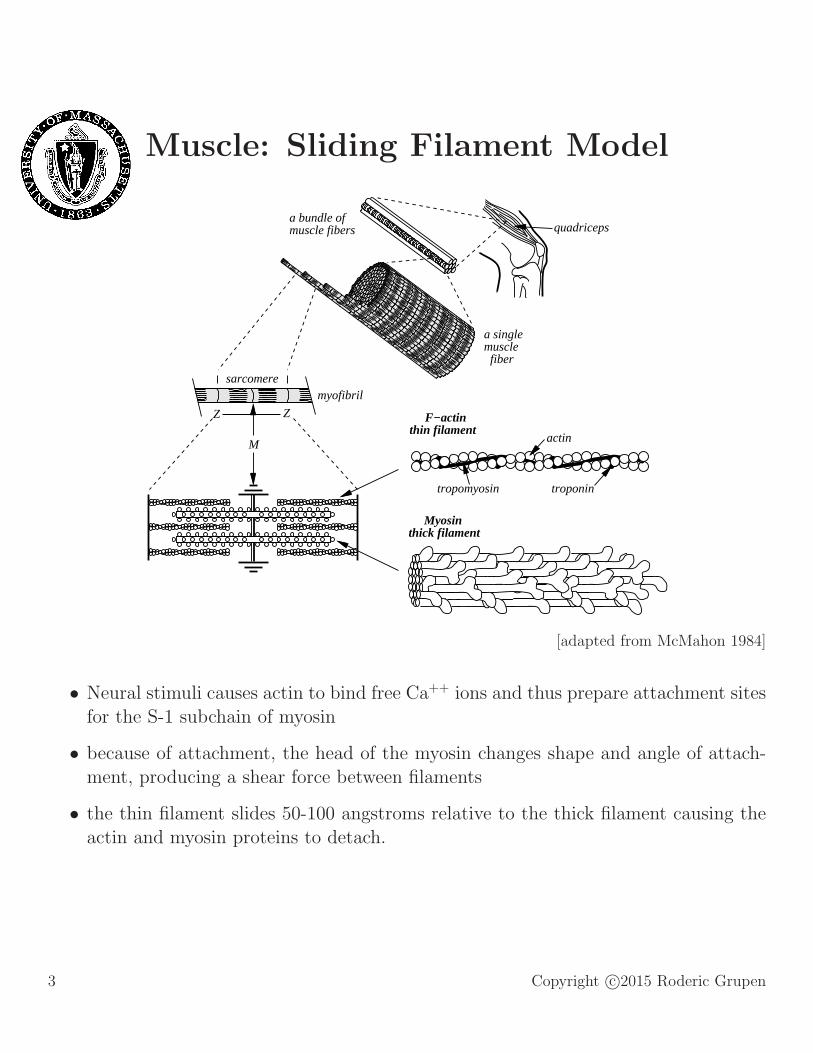
Muscle: Sliding Filament Model
a bundle ofmuscle fibers quadriceps
myofibril
Z Z
sarcomere
Myosinthick filament
a singlemuscle fiber
M
F−actinthin filament
tropomyosin
actin
troponin
[adapted from McMahon 1984]
• Neural stimuli causes actin to bind free Ca++ ions and thus prepare attachment sitesfor the S-1 subchain of myosin
• because of attachment, the head of the myosin changes shape and angle of attach-ment, producing a shear force between filaments
• the thin filament slides 50-100 angstroms relative to the thick filament causing theactin and myosin proteins to detach.
3 Copyright c©2015 Roderic Grupen

The Huxley Model (1957)
myosin (thick) filamenth
actin (thin) filament
x
x=0M(a) (b)
f(x)g(x)
x x=h
[adapted from McMahon 1984]
let 0 ≤ n(x) ≤ 1 be the probability that a crossbridge exists at displacement x, then
dn(x)
dt= [1− n(x)] f(x)− n(x)g(x),
where f(x) is the probability of a new attachment and g(x) describes the probabilitythat an existing crossbridge will detach.
The shape of functions f(x) and g(x) is chosen so that musclestend to shorten in response to neural excitation.
4 Copyright c©2015 Roderic Grupen

Twitch and Tetanic Responses
time (msec)100 200 300
40 Hz
60 Hz
20 Hz
5 Hz
force
fusedtetanus
unfusedtetanus
muscle twitch
[adapted from McMahon 1984]
large mammalian muscles subject to periodic activation at 5, 20,40, and 60 Hz.
5 Copyright c©2015 Roderic Grupen

Muscle Force Generation
0.5 1.0 1.5
0l / l
1.0
0.0
passive
developed
total
maxv / v
1.0
0.2 0.4 0.6 0.8 1.0
2.0
(a) (b)
maxT / TmaxT / T
contractextend
00
1.0
maxP / P
The force capacity of muscle as a function of length and velocity.Tension is normalized by the maximum developed tension, lengthby muscle free length (l0), and velocity by the maximum unloadedcontractile velocity (vmax).
6 Copyright c©2015 Roderic Grupen

Muscle: Linear Model
B
F(x,t)
K muscle
K tendon
active and passive muscle dynamics
7 Copyright c©2015 Roderic Grupen

Actuators: Stepper Motors
• precise (low torque), open-loop position control
• resonance - typically between 50 and 150 steps/sec
• cogging
N
SN
S
NS
(A)
N
S
off off N S
off
off(B)
S
N
N
N
S
S
SN
S
NS
(C)
S
N
off offN
NS
off
off
S
N
N
N
S
S
(D)
8 Copyright c©2015 Roderic Grupen

Permanent Magnet DC Motors
• run continuously in both directions
• closed-loop servo control w/position feedback
• reliable, good power/weight, high torques possible
Lorentz Force
N
S
Bqv+ _
F = qv ×B
9 Copyright c©2015 Roderic Grupen

Permanent Magnet DC Motor
Iron Core:
• high inertia, cogging
• very reliable
• cheap
B
N
S
Moving Coil:
• rare earth magnets - coil is rotor
• low rotor inertia - minimal cogging
• large torque
• can be thin (0.02′′), large diameter(12′′)
• printed-circuit motors
• very expensive
10 Copyright c©2015 Roderic Grupen

DC Motors - Electrodynamics
force: Newton N = kg ·m/sec2
torque: the product of a force and a moment arm
N ·m =kg ·m2
sec2
power: energy per unit time (Watts)
P = V I(electrical)
= τω(mechanical)
Watt =volt · coulomb
sec=
Nm
sec
11 Copyright c©2015 Roderic Grupen

DC Motors - Electrodynamics
B
SN
F
Fqv
qv
_++Vs
I
The Lorentz Force
B
F F
qv
qv
+Vgen
mechanical input
SN
_+
Iload
Backward ElectromotiveForce (Back EMF)
• commutation - the rotor runs out of torque when the currentloop is perpendicular to B, reversing the current can continueto provide torque in the same direction.
• Km: overall motor torque constant - total number of currentloops, magnetic field strength, supply voltage, rotor resistance
– torque production: τ = KmI
– back emf: Vb = Kmω
12 Copyright c©2015 Roderic Grupen

DC Motors - Electrodynamics (cont.)
τ
R
L
Vm
lignoring rotor
inductance L
forwardcurrent
∑
τ = Jθ̈ = KmI = Km
[
V
R−
Kmθ̇
R
]
backcurrent
θ̈ +K2
JRθ̇ +
KV
JR= 0
13 Copyright c©2015 Roderic Grupen
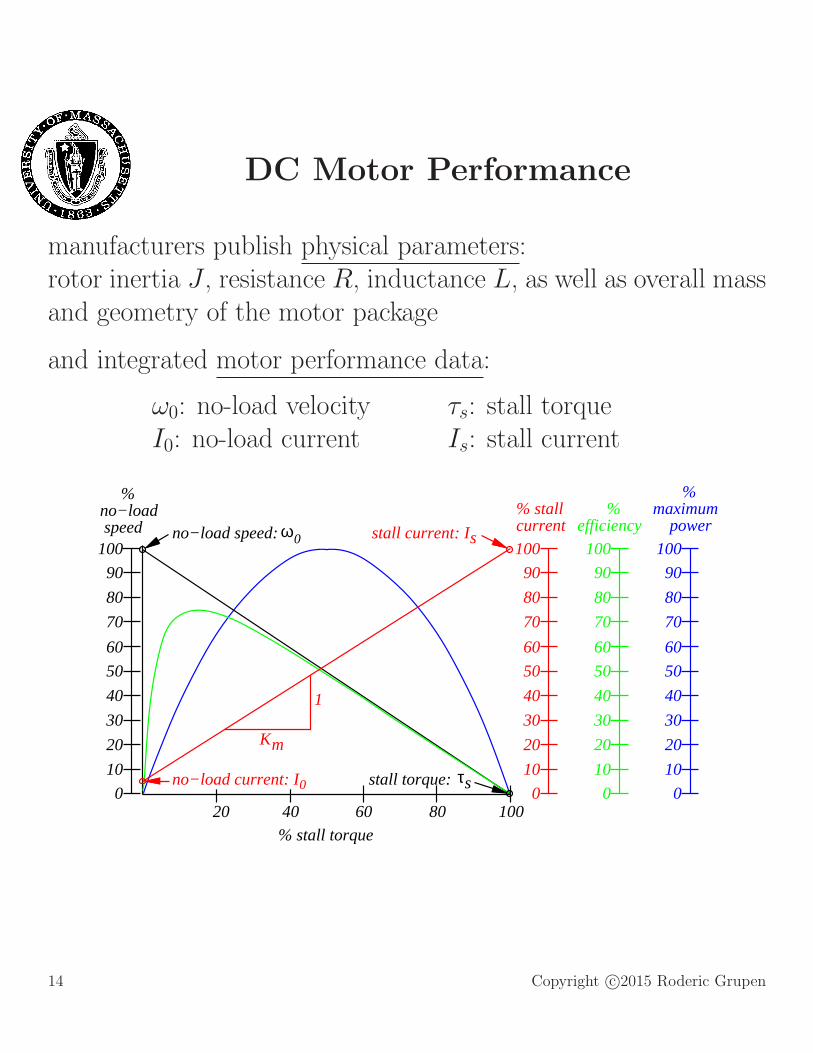
DC Motor Performance
manufacturers publish physical parameters:rotor inertia J , resistance R, inductance L, as well as overall massand geometry of the motor package
and integrated motor performance data:
ω0: no-load velocityI0: no-load current
τs: stall torqueIs: stall current
%no−load speed
20 40 60 80 100
% stall torque
0
10
20
30
40
50
60
70
80
90
100
% stallcurrent
%maximum power
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
70
80
90
100
%efficiency
1
mK
no−load current: I
no−load speed: ω0
0
stall current: I s
stall torque: τs
14 Copyright c©2015 Roderic Grupen

DC Motor Performance
%no−load speed
20 40 60 80 100
% stall torque
0
10
20
30
40
50
60
70
80
90
100
% stallcurrent
%maximum power
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
70
80
90
100
0
10
20
30
40
50
60
70
80
90
100
%efficiency
1
mK
no−load current: I
no−load speed: ω0
0
stall current: I s
stall torque: τs
Power: the product of torque and speed (τω) for loads [0, τs]
Pout = τload ωτ = τload
[
ω0 −∆ω
∆ττload
]
= −
(
∆ω
∆τ
)
τ 2load+(ω0)τload
Efficiency: ητ =mechanical power outelectrical power in
= PoutVsI
ητ =−(
∆ω∆τ
)
τ 2load + (ω0)τloadV (I0 + τload/Km)
15 Copyright c©2015 Roderic Grupen

Roger’s Motor Parameters
PARAMETER wheel shoulder elbow eye
ω0 [rad/sec]no-load speed 175.0 30.1 50.3 122.2
I0 [A]no-load current 0.38 0.26 0.17 0.12
τs [N ·m]stall torque 475.0 205.3 120.7 2.7
Km
[
N ·mA
] [
V ·secrad
]
torque constant 0.105 0.623 0.364 0.163
16 Copyright c©2015 Roderic Grupen

DC Motors/Gearhead Combinations
J
τ
J
τM
M
L
L
+Vin
η =0.01
if the transmission is perfectly efficient:
τoutωout = τinωin
τout(ηωin) = τinωin
τout = (1/η)τin
if η = 0.01, the output shaft carries one hundred times the torqueat one hundredth the velocity of the input shaft
17 Copyright c©2015 Roderic Grupen

DC Motors/GearheadCombinations — Compound Loads
dynamic equation of motion - equate the torque derivedfrom Lorentz forces with the torques required to accelerate theload and to overcome viscous friction.
τM =[
JM θ̈M
]
+ η[
JLθ̈L
]
but:
θL = ηθM ,
θ̇L = ηθ̇M , and
θ̈L = ηθ̈M
so:τM =
[
JM + η2JL]
θ̈M
and:
Jeff = JM + η2JL
if η = 0.01, this means the relative influence of themotor dynamics is amplified 10,000 fold
18 Copyright c©2015 Roderic Grupen

Driving DC Motors
H-Bridge
V
s2
s3
s4
s1
V
s2
s3
s4
s1
• continuous forward/backward speedcontrol
• (s1, s2, s3, s4) open - freewheel
• (s1, s2, s3, s4) closed - (regenerative)braking
• RMS voltages - pulse width modu-lation (PWM)
19 Copyright c©2015 Roderic Grupen

Pulse Width Modulation
−V
+V
RMS V
ton
toff
t
+100
−100
−V
+V
ton
toff
+100
−100
−V
+VRMS V
ton
toff
t
+100
−100
RMS V
20 Copyright c©2015 Roderic Grupen

Actuators: Hydraulic
servo servo
• energy in the high pressure fluid reservoir (1000-3000 psi)
• open-loop control - fork lifts, back hoes
• good bandwidth (5 KHz - fluid reverses direction 5 msec)
PROS
1. good power/weight
2. safe in explosive environments
CONS
1. expensive servos
2. messy
3. high maintenance
21 Copyright c©2015 Roderic Grupen

Actuators: Pneumatic
• compressible fluid (air)
• jet-pipe servo control
NcontrolV
glasscylinder
graphite pistonS
reservoir 80 psi
PROS
1. light and cheap
2. passively backdrivable
CONS
1. stiction
2. delicate
22 Copyright c©2015 Roderic Grupen

Artificial Muscles
McKibben Air Muscles - non-linear pneumatic actuators, at-tract interest because they are among the strongest and fastestof the “artificial” muscles.
Shape Memory Alloys - Nitinol “muscle wire” (nickel-titaniumalloy) relatively slow, commercially available, a few grams force(similar to all options below this on in the list), low bandwidth( 1Hz)
Polymers - electrostatic, chemical, and thermal, polymer gelscan exhibit abrupt, reversible 1000 fold volume changes, forcesup to 100 N/cm2, contraction rates on the order of a second.
Synthetic Muscle - extracted actin and myosin protein, possi-bly avoiding tissue rejection
Bucky Tubes - Fullerenes (“Bucky Balls”) and nanotubes (“BuckyTubes”), crystalline configurations of graphitic carbon.
23 Copyright c©2015 Roderic Grupen