
Actuadores deber,,,,,,
42
Unidad Académica de ciencias de la ingeniería y aplicadas Ingeniería Electromecánica Séptimo nivel Robótica Integrantes: Checa Zoila León Bayron
Transcript of Actuadores deber,,,,,,

Unidad Académica de ciencias de la ingeniería y aplicadas
Ingeniería Electromecánica
Séptimo nivel
Robótica
Integrantes:
Checa Zoila
León Bayron


Los actuadores son dispositivos capaces de generar unafuerza a partir de líquidos, de energía eléctrica ygaseosa

Definición Los actuadores son dispositivos (eléctricos) por medio de los cuales se
modifican estados de sistemas como pueden ser: iluminación,climatización, persianas y motores entre otros.
Para cada tipo de carga existe un determinado tipo de actuador.Según se trate de un circuito de iluminación, de un motor o de unaválvula, habrá que seleccionar el actuador correspondiente para elcorrecto funcionamiento del sistema.
Son aquellos elementos que pueden provocar un efecto sobre unproceso de forma automática
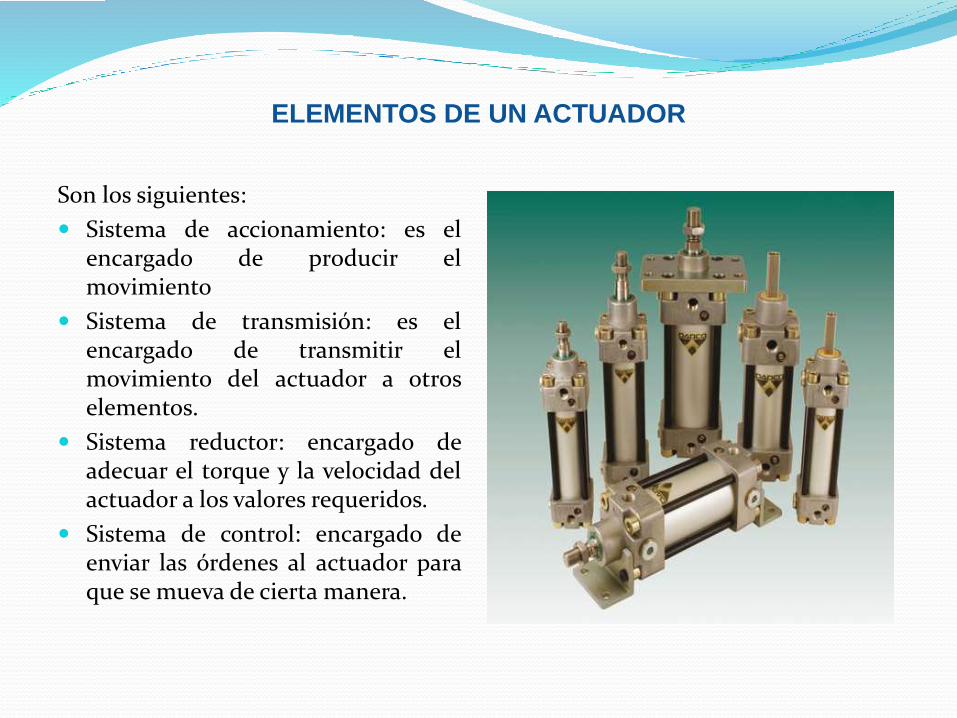
ELEMENTOS DE UN ACTUADOR
Son los siguientes:
Sistema de accionamiento: es elencargado de producir elmovimiento
Sistema de transmisión: es elencargado de transmitir elmovimiento del actuador a otroselementos.
Sistema reductor: encargado deadecuar el torque y la velocidad delactuador a los valores requeridos.
Sistema de control: encargado deenviar las órdenes al actuador paraque se mueva de cierta manera.
Existen tres tipos de actuadores:
Hidráulicos
Neumáticos
Eléctricos

ACTUADOR ELECTRONICO
Un actuador electrónico solo requiere energía eléctrica como fuente de poder los actuadores electrónicos hacen honor a su nombre y están basados en mecanismos electrónicos para su funcionamiento. Existen actuadores electrónicos que consumen una considerable cantidad de energía, para este tipo de casos se utilizan drivers. Los actuadores eléctricos son utilizados en diferentes aparatos mecatrónicos, como pueden ser robots. Algunos tipos de actuadores electrónicos son:
LEDs
DC Motor
Electro valvula
Nitinol
Rele

Actuadores eléctricos
Características generales
Solo requieren de energía eléctrica Como solo se necesitan cables para transmitir las señales. Son
muy versátiles No hay restricciones de distancia entre la fuente de poder y el
actuador
Es un traductor, que transforma señales eléctrica enmovimientos mecánicos Los actuadores eléctricostambién son muy utilizados en los aparatos mecánicosy electrónicos.

Ventajas - Desventajas Ventajas:
PrecisosFiablesFácil controlSencilla instalaciónSilenciosos
Desventajas:
Potencia limitada

Clasificación Dentro de los actuadores eléctricos pueden
distinguirse tres tipos diferentes:
Motores de corriente continua (DC). Servomotores
Motor paso a paso
Motor de corriente alterna (AC)

Motores de corriente continua
El motor de corriente continua es una máquina queconvierte la energía eléctrica en mecánica,principalmente mediante el movimiento rotatorio.
La principal característica
es la posibilidad de regular la velocidad desde vacío aplena carga

El motor de C.C. esta constituido por dos piezas fundamentales
Rotor: constituye la parte
móvil del motor y proporciona el torque para mover la carga
Estator: constituye la parte
fija y su función es suministrar el flujo magnético que será usado por el bobinado del rotor para realizar el movimiento giratorio

Servomotores Los servos son un tipo especial de motor de c.c.(aunque ya los hay de
c.a.) que se caracterizan por su capacidad para posicionarse de forma inmediata en cualquier posición dentro de su intervalo de operación. Para ello, el servomotor espera un tren de pulsos que se corresponde con el movimiento a realizar
El resultado es un servo de posición con un margen de operación de 180° aproximadamente

Motor paso a paso Es un dispositivo electromecánico que convierte una serie de impulsos
eléctricos en desplazamientos angulares discretos, lo que significa esque es capaz de avanzar una serie de grados (paso) dependiendo de sus
entradas de control.

CaracteristicasVentajas
Es capaz de asegurar unposicionamiento simple y exacto
Ligeros, fiables, y fáciles decontrolar, pues al ser cada estado deexcitación del estator estable, elcontrol se realiza en bucle abierto,sin la necesidad de sensores derealimentación.
Son ideales donde se requiere unmovimiento preciso
Desventajas El funcionamiento a bajas
velocidades no es suave, ya queexiste el peligro de perdida de unaposición por trabajar en bucleabierto
Tienden a sobrecalentarsetrabajando a velocidades elevadas ypresentan un limite en el tamañoque pueden alcanzar.

ClasificaciónExisten tres tipos de motores paso a paso:
De imanes permanentes
De reluctancia variable
Híbridos.

Motor de corriente alterna (AC) Se basa en la utilización de corriente alterna
La corriente alterna es aquella en que la que la intensidad cambia dedirección periódicamente en un conductor. como consecuencia delcambio periódico de polaridad de la tensión aplicada en los extremosde dicho conducto
La variación de la tensión con el tiempo puede tener diferentes formas:
senoidal, triangular, trapezoidal….
Corriente alterna senoidal
VENTAJAS DE LA CORRIENTE ALTERNA
La corriente alterna presenta ventajas decisivas de cara a la produccióny transporte de la energía eléctrica, respecto a la corriente continua:
1-Generadores y motores mas baratos y eficientes, y menos complejos 2-Posibilidad de transformar su tensión de manera simple y barata
(transformadores) 3-Posibilidad de transporte de grandes cantidades de energía a largas
distancias con un mínimo de sección de conductores ( a alta tensión) 4-Posibilidad de motores muy simples, (como el motor de inducción
asíncrono de rotor en cortocircuito) 5-Desaparición o minimización de algunos fenómenos eléctricos
indeseables (magnetización en las maquinas, y polarizaciones ycorrosiones electrolíticas en pares metálicos)

Existen dos tipos fundamentales de motores de corriente alterna:
motores asíncronos
motores síncronos

Motores asincronos Son probablemente los más sencillos y robustos de los motores
eléctricos
El rotor está constituido por varias barras conductoras dispuestasparalelamente el eje del motor y por dos anillos conductores en losextremos. El conjunto es similar a una jaula de ardilla

Motores síncronos El motor síncrono, como su nombre indica, opera exactamente a la
misma velocidad que el campo del estator, sin deslizamiento.
El motor síncrono, utiliza el mismo concepto de un campomagnético giratorio producido por el estator, pero ahora el rotorconsta de electroimanes o de imanes permanentes (PM) quegiran sincrónicamente con el campo del estator
a
b
ci
i
i
Stator coil
Rotor coils
Motor Asíncrono (Inducción Motor (AC) Síncrono


Los actuadores mecánicos son dispositivos quetransforman el movimiento rotativo a la entrada, en unmovimiento lineal en la salida.
Los actuadores mecánicos aplicables para los camposdonde se requiera movimientos lineales tales como:elevación, traslación y posicionamiento lineal.

Algunas de las ventajas que nos ofrecen los actuadoresmecánicos son: Alta fiabilidad, simplicidad deutilización, mínima manutención, seguridad yprecisión de posicionamiento; irreversibilidad según elmodelo de aplicación, sincronismo de movimiento.

Dentro del campo de los actuadores mecánicos encontramos dos tipos de movimiento:
A) Actuadores mecánicos/ lineales con husillo traslante
B) Actuadores mecánicos/ lineales con husillo rotante

Dentro de los actuadores mecánicos encontramos dos tipos:
Actuadores hidráulicos
Actuadores neumáticos

ACTUADOR HIDRAULICO LINEAL
Son componentes que transforman la energía hidráulica que reciben en mecánica
Tienen como función convertir el flujo de fluido hidráulico en movimiento lineal o rotatorio.

Su tamaño va en función de las cargas operacionalesque tenga que sufrir y básicamente consiste en uncilindro exterior dentro del cual se desliza un pistón.Unido al pistón se encuentra un vástago que atraviesael fondo del cilindro y es el que transmite elmovimiento linealmente.

Los cilindros hidráulicos de movimiento lineal sonutilizados comúnmente en aplicaciones donde lafuerza de empuje del pistón y su desplazamiento sonelevados.
Los cilindros hidráulicos pueden ser de simple efecto,de doble efecto y telescópicos.
En el cilindro de efecto simple, el fluido hidráulicoempuja en un sentido el pistón del cilindro y unafuerza externa (resorte o gravedad) lo retrae en sentidocontrario.

El cuerpo del cilindro es la caja externa tubular y contiene el pistón, el sello del pistón y el vástago.

El cilindro de acción doble utiliza la fuerza generadapor el fluido hidráulico para mover el pistón en los dossentidos, mediante una válvula de solenoide.
El cilindro de acción doble es el accionador hidráulicomás común utilizado actualmente y se usa en lossistemas del implemento, la dirección y otros sistemasdonde se requiera que el cilindro funcione en ambasdirecciones.

El cilindro telescópico contiene otros de menosdiámetro en su interior y se expanden en etapas, sonmuy utilizados en grúas. Está constituido por los tuboscilíndricos y vástago de émbolo. En el avance saleprimero el émbolo interior, siguiendo desde dentrohacia fuera los siguientes vástagos o tubos. Lareposición de las barras telescópicas se realiza porfuerzas externas. La fuerza de aplicación estádeterminada por la superficie del émbolo menor


ACTUADORES NEUMATICOS LINEALES
Aunque en esencia los actuadores neumáticos ehidráulicos son idénticos, los neumáticos tienen unmayor rango de compresión y además existendiferencias en cuanto al uso y estructura

El cilindro neumático consiste en un cilindro cerradocon un pistón en su interior que desliza y quetransmite su movimiento al exterior mediante unvástago. Se compone de las tapas trasera y delantera,de la camisa donde se mueve el pistón, del propiopistón, de las juntas estáticas y dinámicas del pistón ydel anillo rascador que limpia el vástago de lasuciedad.

Existen dos tipos fundamentales de los cuales derivanconstrucciones especiales.
Cilindros de simple efecto, con una entrada de airepara producir una carrera de trabajo en un sentido.
Cilindros de doble efecto, con dos entradas de aire paraproducir carreras de trabajo de salida y retroceso.

Cilindros de simple efecto
Un cilindro de simple efecto desarrolla un trabajo sóloen un sentido. El émbolo se hace retornar por mediode un resorte interno o por algún otro medio externocomo cargas, movimientos mecánicos, etc. Puede serde tipo “normalmente dentro” o “normalmente fuera”.
Los cilindros de simple efecto se utilizan para sujetar,marcar, expulsar, etc.


Cilindros de doble efecto
Los cilindros de doble efecto son aquellos que realizantanto su carrera de avance como la de retroceso poracción del aire comprimido. Su denominación se debea que emplean las dos caras del émbolo (aire en ambascámaras), por lo que estos componentes sí puedenrealizar trabajo en ambos sentidos.

El campo de aplicación de los cilindros de dobleefecto es mucho más extenso que el de los desimple, incluso cuando no es necesaria larealización de esfuerzo en ambos sentidos
Para poder realizar un determinado movimiento(avance o retroceso) en un actuador de dobleefecto, es preciso que entre las cámaras exista unadiferencia de presión. Por norma general, cuandouna de las cámaras recibe aire a presión, la otraestá comunicada con la atmósfera, y viceversa


















