
EquIpEx fIguREs LAbEx Ms2T HEnRI vERDIER Workshop Regard ...

www.labexms2t.fr
Activity ReportJuly 2013 - June 2014
Labex MS2TUniversité de Technologie de Compiègne - Centre de Recherches de Royallieu
CS 60319 - 60203 COMPIEGNE Cedex - FranceTél : +33 (0)3 44 23 46 37 - Fax : +33 (0)3 44 23 44 77 - [email protected]
Lab
ex M
S2T
Act
ivity
Rep
ort
Jul
y 20
13-J
une
2014

2 Labex MS2T Activity Report 2013-2014
Act
ivity
Rep
ort
201
3-20
14
99Labex MS2T Activity Report 2013-2014
Laboratory of ExcellenceLabex MS2T
Maîtrise des Systèmes de Systèmes Technologiques Control of Technological Systems of Systems
Contacts:Professor Ali ChararaDirector of Labex MS2T
Laurie HerlinAssistance steering and coordination Officer

Sci
entifi
c R
epo
rt
3Labex MS2T Activity Report 2013-2014
Sum
mar
y
3
Overview ............................................................................7Context .................................................................................... 7
Partners of the Project .................................................................. 7
Summary and Objectives ..............................................................10
Governance and Operation ............................................................11
Guidelines Labex MS2T Operation ....................................................12
Scientific Report ............................................................13Scientific Coordination .................................................................13
Scientific Review and Perspectives by Research Topic ............................16
PhD theses and Post-doctorates ......................................................33
Visiting Chairs ...........................................................................34
New Projects .............................................................................36
Experimental Platforms - Equipex Robotex .........................................47
Training: Master’s Degree in Interacting Complex Systems ................................49
Industrial Transfer and Partner Relations................54
Conferences and Events ...............................................56
Human Resources ...........................................................61Labex Members ..........................................................................61
Recruitment Policy ......................................................................62
Chair proposals - Recruitment Process ..............................................62
Finance .............................................................................63
Appendices ......................................................................64
Summary

USA
Mexico
Italy
Australia
PolandSpain
INCLUDING
70PERMANENTS
7POST-DOCS
8INTERNATIONAL
VISITORS
FUNDED BY THE LABEX MS2T
124MEMBERS
MASTER'S STUDENTS
532013 - 2014
872014 - 2015
ALLOWED MASTER'S INTERNSHIPS(800 €/MONTH -10 MONTHS)
7
PUBLICATIONS
100
1PLATFORMS
ENGINEER
10PHD
STUDENTS
2013-2014
6,7 M €
(2011-2019)
(2013-2014)
CO-FUNDING(2013-2014)
700 k 300 k
4 Labex MS2T Activity Report 2013-2014

USA
Mexico
Italy
Australia
PolandSpain
INCLUDING
70PERMANENTS
7POST-DOCS
8INTERNATIONAL
VISITORS
FUNDED BY THE LABEX MS2T
124MEMBERS
MASTER'S STUDENTS
532013 - 2014
872014 - 2015
ALLOWED MASTER'S INTERNSHIPS(800 €/MONTH -10 MONTHS)
7
PUBLICATIONS
100
1PLATFORMS
ENGINEER
10PHD
STUDENTS
2013-2014
6,7 M €
(2011-2019)
(2013-2014)
CO-FUNDING(2013-2014)
700 k 300 k
Labex MS2T Activity Report 2013-2014 5

6 Labex MS2T Activity Report 2013-20146

Sci
entifi
c R
epo
rt
7Labex MS2T Activity Report 2013-2014
Ove
rvie
w
Investing for the Future The Laboratory of Excellence Labex MS2T was chosen by the French government in March 2011 after being selected by an international jury as part of the “Investments of the Future” programme. It received a €6.7 million grant for nine years. The «Laboratories of Excellence» programme, coordinated by ANR1, aims to provide the best national laboratories with international visibility and significant resources in order to enable them to compete with their foreign counterparts, attract internationally renowned researchers and academics, and create a high-level and integrated research, training and development policy.
• Heudiasyc UMR2 7253 (Project leader)Founded in 1980, HEUDIASYC (Heuristics and diagnostics for complex systems) is a joint research unit between UTC and CNRS. The laboratory fosters research in Control systems, Robotics, Decision-making and Computing, and favours embedded approaches in order to meet socio- economic challenges in ICT, Security, Transports and Mobility and the Environment.
Context
Partners of the Project
> Laboratories
Overview
150people
€5.5M50% on
contracts
30industrialparterns
5start-ups
50ongoingprojects
160publications
/year
75ongoing
PhDs
4 research teams> ASER: Automation, Embedded Systems, Robotics > DI: Decision, Image> ICI: Information, Knowledge, Interaction> RO: Networking, Optimisationwww.hds.utc.fr
1 ANR: Agence Nationale de la Recherche (French national research agency)2 UMR: Unité mixte de recherche (Joint research unit). A UMR is an administrative entity created by a partnership agreement between several research units,higher education institutions or research entities and the CNRS. A UMR is usually created for 5 years, which may be renewed
7

8 Labex MS2T Activity Report 2013-2014
4 research teams> C2B: Cells, Biomaterials and Bioreactors > FSB: Interaction Fluids and Structures of Biological Systems> C3M: Multi-scale Mechanical Characterisation and Modelling > NSE: Neurophysiology and Electrophysiological Signals www.utc.fr/bmbi
3 research teams> MNM: Computational Mechanics > AVI: Acoustics and Vibrations > MAS: Materials and Surfaces roberval.utc.fr
• BMBI UMR 7338Founded in 1982, the Biomechanical and Bioengineering laboratory (joint research unit between UTC and CNRS) fosters research in Mechanics, Physics of Life and Health Engineering aimed at unders-tanding the mechanisms of living systems at different scales and levels, ranging from the molecular to cell, tissue, organ and system levels (musculoskeletal, cardiovascular). Development of diagnosis tools, bio-materials-organs.
• Roberval UMR 7337The Roberval laboratory (joint research unit between UTC and CNRS) fosters research in mechanics, acoustics and vibrations, materials and design. Predictive models are often built on the basis of multi-scale approaches. Numerical approaches are used at all levels: calculation/test dialogue, for-mulation and identification of behaviour models, design, analysis and optimisation of structures and systems.
90people
20European and
industrialsprojects
€2,5M
2start-ups
100publications
/year
35ongoing
PhDs
140people
40industrials andnational projects
€6M
2start-ups
150publications
/year
80ongoing
PhDs
8

9Labex MS2T Activity Report 2013-2014
Ove
rvie
w
• UTC Université de Technologie de Compiègne is a public institution which awards engineering degrees, master’s degrees and PhDs. Its main fields of interest are educa-tion, research and technology transfer. Created in 1972 as a new model in the French higher education sys-tem, UTC is now a successful educational institution in the French academic landscape and is classified as a top-ranked institution for engineering. www.utc.fr
• CNRS The French National Centre for Scientific Research (CNRS) is a government-funded research organisa-tion under the administrative authority of the French Ministry of Research. The CNRS operates through both its own laboratories and other laboratories run jointly with universities, fellow research organisations and privates companies. These laboratories are located throughout France, and several of them are even loca-ted abroad. The institutes are aimed at implementing the organi-sation’s scientific policy. Two institutes are of direct interest to Labex MS2T: the INS2I Institute for Infor-mation Sciences and Technologies, INSIS Institute for Engineering and Systems Sciences, and the Mission for Interdisciplinarity.www.cnrs.fr
> Guardianship
• Sorbonne UniversitésSorbonne Universités is a Research and Higher Education Cluster (PRES) created in 2010 which groups together nine major institutions:> 2 universities: Paris-Sorbonne (art, humanities and social science), Pierre et Marie Curie (science and engineering)> one engineering school: UTC (Université de Techno-logie de Compiègne)> one business school: INSEAD> one museum: Muséum national d’histoire naturelle (National Museum of Natural History)
> 3 public research organisations: CNRS, Inserm (National Institute of Health and Medical Research), IRD (Institute of research for development).
In spring 2012, Sorbonne Universités was one of the successful candidates of the Excellence Initiative (IDEX) call for projects. The aim of this initiative was to create between 5 and 10 world-class pluridisciplinary clusters of higher education and research.www.sorbonne-universites.fr
9

10 Labex MS2T Activity Report 2013-2014
The unprecedented development of means of communication today requires a large-scale interconnection of autonomous technological systems that can cooperate to perform certain tasks. We refer to «technological systems of systems» (TSoS), which are defined in parti-cular by the autonomy and heterogeneity of the component systems.
The Management of Technological Systems of Systems (MTSoS), which is the focus of this project, targets a potentially very wide scope of application, including very impor-tant socio-economic issues in the fields of transport and mobility (smart electric cars, multimodal transport systems), security (mini-drones), health engineering (occupational the-rapy, micro-nano technologies for biological systems), and environment & energy (mana-gement of natural risks, energy mix). Beyond the engineering-related aspects, the control of TSoS represents a considerable scientific challenge which, to date, has not been the object of much study among the academic teams. The project has been desi-gned to break scientific bottlenecks in three main avenues:
-1- Interaction and cooperation among systems: Management of information flows in the networks; Distributed information processing.-2- Management of uncertainties: Modelling of uncertainties; Robustness in the face of uncertainties and integrity; Taking uncertainty into account in digital modelling.-3- Optimized design of TSoS: Multi-level and multi-physical optimisation; Scheduling and synchronization of mobile sub-systems; Security of TSoS operation.
This ambitious scientific programme can only be met through a multi-disciplinary approach. To this end, the UTC (Université de Technologie de Compiègne) built the project with the Heudiasyc UMR (control systems, robotics, information fusion, machine lear-ning, networks, optimisation and scheduling), drawing on the skills of the BMBI UMR (mul-ti-scale knowledge of the ability to unders-tand the operations and mechanisms of living systems) and of the Roberval UMR (testing and design of mechanical systems). These laboratories were already brought together in a CNRS Research Federation (FR SHIC 3272 - Heterogeneous Systems in Interaction). In the medium term, an extension is also planned in the UTC-CNRS Collegium in the areas of
> Labex MS2T: an interdisciplinary scientific problem that raises major socioeconomic issues
Control of Technological Systems of systems
4 applications
Director : A. Charara Director : M. C. Ho Ba Tho Director : J. M. Roelandt
FR SHIC 3272
Transportand mobility
Research Topic 1: Interaction and cooperation between systems
Research Topic 2: Uncertainty management
Research Topic 3: Optimized design of technological SoSs
SecurityEnvironmentand Energy
HealthEngineering
10
Summary and Objectives

11Labex MS2T Activity Report 2013-2014
The governance planned for the management of Labex MS2T has 4 main objectives:
> Provide the project with strategic manage-ment, involving the key financial backers > Involve recognised experts in the scientific management of the projectTo open up the project to an internationa dimension and lay the foundations for new collaborations> Provide the project with an operational authority for operations management and monitoring> Avoid excessively cumbersome and complex governance by dividing the opera-tional responsibilities of Labex in a way that is fully in line with the current governance of the Heudiasyc laboratory and the SHIC Federation.
Governance and Operation
Steering board4-5 members
Assistance Steering andCoordination Officer
L. Herlin
InternationalCoordinatorY. Grandvalet
Research Topic 1Manager:
Interactionand cooperationbetween systems
A. Bouabdallah
Research Topic 3Manager:
Optimized design oftechnological SoSs
P. Villon
Research Topic 2 Manager:
UncertaintymanagementS. Destercke
Head ofTraining
P. Bonnifait
ScientificCoordinatorT. Denoeux
Head ofApplications
Head of FinanceD. Porras
Steeringcommittee6 members
International Advisory CommitteeT. AvenL. BilstonA. BroggiM. Jamshidi
D. LuzeauxR. SlowinskiK. Worden
Ove
rvie
w
11
Director Labex MS2TA. Charara
Human Sciences via the Knowledge, Orga-nisation and Technical Systems laboratory (Costech).The originality of this project is based on an integrative approach involving application issues and scientific bottlenecks, which is made possible through the richness and diver-sity of the experimental system. The project will further enhance the diversity of this sys-tem and the human resources at the service of researchers, students and manufacturers.The project aims to accelerate the breaking of scientific bottlenecks to promote the emergence of an international MTSoS scien-tific community which will include a chair of excellence, associated chairs, joint super-vision of theses, the organisation of yearly international workshops, etc. To this end, existing connections with the universities of Beijing and Shanghai (China), Cinvestav (Mexico), Braunschweig (Germany), etc. will be strengthened.
Labex MS2T is based on the coherence of the UTC/CNRS Collegium, the first collegium in France established between a university and the CNRS, whose goal is to create an engineering sciences cluster. Labex MS2T will also benefit from the Innovation Centre currently being built, which will host techno-logy projects as they develop and mature, and from the SATT, a company formed to speed up technology transfer, which seeks to further strengthen the technology promotion approach. Lastly, the upcoming construc-tion of a building dedicated primarily to the Heudiasyc laboratory will greatly improve working conditions for participants to the MS2T project.In addition to this main academic subject, the project has planned to develop a new engineering TSoS curriculum and important prospects for promotion, facilitated by the favourable context provided by the UTC on this matter, the basis of which will be esta-blished by a private partners’ association. The financial leveragel effect of the project is expected to be very strong.

12 Labex MS2T Activity Report 2013-2014
Guidelines Labex MS2T Operation
These guiding principles have led us to 3 governance authorities.
Composition of the IAC
> Terje Aven, Université de Stavanger – Norway> Lynne Bilston, UNSW – Australia> Alberto Broggi, Université de Parme – Italy> Mo Jamshidi, University of Texas, USA
Partners’ clubIndustrial contracts
Platforms
Master of science (MICS)
CoordinationScientific projects
PhDs and postdocs
Visiting ChairChair of Excellence
Internationalprojects
12
> Dominique Luzeaux, DGA – France> Roman Slowinski, Poznań University of Technology Poland> Keith Worden, University of Sheffield – UK
> A Steering CommitteeThe Steering committee is the MS2T executive body. It is comprised of: Direc-tors of partner laboratories, the scientific programme coordinator, the training manager, the promotion manager, and the administra-tive and financial manager. The role of the Steering Committee is as follows:> ensuring and monitoring the proper functio-ning of the PROJECT, > deciding on resource allocation, > supervising the implementation of specific activities (workshops, working groups, sym-posiums, communication tools, etc.), > examining budgets, > approving activity reports and any assess-ment documents for internal use (Guar-dianship, International Advisory Committee, Steering Board) or external use (in particular the ANR - French National Research Agency), > deciding on the admission or rejection of a new application. The COMMITTEE may request the opinion of the IAC [International Advisory Commitee]. The Steering committee meets once a month.
A person responsible for helping with the steering and coordination of activities was recruited within the framework of MS2T. This person reviews all internal and external files at Labex MS2T.
> A Steering BoardEvery year, this board examines and validates the strategy and results of Labex presented by the management team, and focuses on the implementation of operations in the medium and long term.It comprises a representative of the super-visory authorities (UTC, CNRS, Sorbonne University), of the ANR (French National Re-search Agency), and of the Regional Council of Picardy. The Director of Labex will be a guest member.
> An International Advisory CommitteeOnce a year, this committee examines and approves the Labex project strategy, its research programme and its results. It is also responsible for updating the project’s research issues in the long term, for instance those defined within a scientific roadmap, as well as the project’s training and innovation issues.External assessment of the current state of the project.Guidance: the committee suggests new scientific trends, priorities or milestones, transfer policies and ways to attract top-level foreign researchers.It is comprised of renowned scientific personalities.

Sci
entifi
c R
epo
rt
13Labex MS2T Activity Report 2013-2014
Scientific coordination is carried out primarily at the research-topic level. Research topic meetings are open to all members and can be conducted in the form of workshops. In addition, a monthly seminar is open to the outside world.Scientific coordination is divided into several activities:> Seminars> Research topic workshop groups> Several calls for projects> Challenge team
> Labex seminarsEvery month, Labex MS2T receives internatio-nally renowned French or foreign researchers within the framework of its seminars based on issues related to Systems of systems. The media and videos from the presentations can be accessed on the Labex MS2T website.
Three Labex MS2T members are responsible for organising the seminars (scheduling, dissemination, etc.): Antoine Jouglet, MCF HDR Heudiasyc, Anne Virginie Salsac, CR CNRS BMBI, Catherine Vayssade, IR CNRS Roberval.
Scientific CoordinationScientific coordinator: Thierry Denoeux
Scientific Report
3 MCF: « Maître de Conférences ». Associate Professor 4 HDR: « Habilitation à Diriger des Recherches ». Accreditation to Supervise Research5 CR: « Chargé de Recherche CNRS ». Permanent CNRS researcher 6 IR: « Ingénieur de Recherche CNRS ». CNRS Research Engineer
13

14 Labex MS2T Activity Report 2013-2014
Seminars in 2013• Sanjeeva Murthy: Affiliated with the New Jersey Center for Biomaterials, Rutgers University, New Jersey (USA).Studies of the structures at the surface and in the bulk in biomaterials used in drug delivery and as scaffolds
• Christian Gasser: Associate Professor at KTH Solid Mechanics, School of Engineering Sciences, Royal Institute of Technology (KTH), Stockholm (Sweden).Constitutive modeling of vascular tissue with application to the abdominal aortic aneurysms wall
• Angela Schoellig: Assistant Professor at the University of Toronto, Institute for Aeros-pace Studies (UTIAS) (Canada).Are we there yet ? Robots That Learn from Experience, and Enhance Their Perfor-mance and Autonomy over Time
• Alcherio Martinoli: Professor at the Ecole Polytechnique Federale de Lausanne and Director of Distributed Intelligent Systems and Algorithms Laboratory (DISAL) (Switzerland).Distributed sensing using resource-constrained multi-robot systems
• Mo Jamshidi: Professor at the University of Texas, San Antonio (USA) and President of the International Scientific Committee of the Labex MS2T.System of systems engineering - Innova-tion and challenges for 21st century
• Bruno Sudret: Professor of Risk, Safety and Uncertainty Quantification at the Institute of Structural Engineering, ETH Zurich (Switzer-land).Computational methods for uncertainty quantification and sensitivity analysis of complex systems
• Randall Thomas: CNRS Research Director, IR4M UMR8081CNRS & Univ. Paris-Sud at Orsay and Villejuif (France).Modeling the multiscale functionality of the (mammalian) kidney
• Gérard Le Lann: INRIA Emeritus Research Director,and international consultant.On the power of cohorts – Multipoint pro-tocols for fast and reliable safety-critical communications in intelligent vehicular networks
• Gabriele Dubini: Full Professor in Bioen-gineering since 2007 at the Department of Structural Engineering and since 1 Janua-ry 2013 at the Department of Chemistry,
Materials and Chemical Engineering “Giulio Natta”, Politecnico di Milano (Italy).Computational fluid dynamics modelling and congenital heart diseases
• Michal Pioro: Professor and Head of the Computer Networks and Switching Division at the Institute of Telecommunications at the Warsaw University of Technology (Poland) and professor at the Department of Electro and Information Technology at Lund Univer-sity (Sweden).Transmission scheduling in wireless mesh networks
• Roberto Sacile: Director of DELAB, the joint laboratory between the University of Genoa (Italy) and Eni S.p.A., on safety and security in logistics.System of systems views of safety and vulnerability in dangerous goods transpor-tation by road
• Arturo Zavala: Senior Researcher IPICYT – San Luis Potosi Institute of Scientific and Technological Research (Mexico).A generalized scheme for the global adap-tive regulation of robot manipulators with bounded inputs
• Bruno Bachimont and Olivier Gapenne: Professors of UTC, respectively Head of research of UTC, and director of the Doctoral School of UTC.Autonomy: a challenge for future science and design
Seminars in 2014• Scott Ferson: Senior scientist at Applied Biomathematics, Business research firm (Long Island, New York), and adjunct profes-sor at Stony Brook University, (USA).Where uncertainty paradoxes come from ?
• Rodolphe Leriche: CNRS permanent researcher and leader of the DEMO (Decision in the Enterprise, Modeling, Optimization) team at the Ecole des Mines de Saint-Etienne, (France). Optimizing with realistic simulators and metamodels
• Olivier Dauchot: Head of the recently founded research team EC2M (Collective effects in Soft Matter) within the CNRS Gulliver laboratory, at ESPCI, in Paris, (France).Active Matter: understanding collective motion through model experiments
14

Sci
entifi
c R
epo
rt
15Labex MS2T Activity Report 2013-2014
• Dominique Luzeaux: Deputy Director in the Directorate of Joint Networks, Infrastructure and Information Systems in the Department of Defense. Author of several books on en-gineering and complex systems of systems, chair of the French Association of Systems Engineering until 2013.Complexity Science and engineering sys-tem
• Julien Yvonnet: Full professor at University of Paris-Est Marne-la-Vallée, (France).Numerical multiscale approaches for modeling of complex heterogeneous ma-terials and structures: recent contributions
• Jérôme Noailly: Principal investigator in the Biomechanics and Mechanobiology group at the Institute for Bioengineering of Catalonia (IBEC) (Spain), since 2012. Also IBEC’s legal representative of the Virtual Physiological Human Institute, and the current president of the National Spanish Chapter of the European Society of Biomechanics.Integration of biomechanical and biophy-sical in silico models to explore the com-plexity of musculoskeletal diseases over multiple scales
• Ian Akyildiz: Ken Byers Distinguished Chair Professor at the School of Electrical and Com-puter Engineering, Georgia Institute of Tech-nology, and Director of the Broadband Wire-less Networking Laboratory and Chair of the Telecommunications Group at Georgia Tech. Honorary Professor at the School of Electri-cal Engineering at the Universitat Politecnica de Catalunya, and Extraordinary Professor at the Department of Electrical, Electronic and Computer Engineering at the University of Pretoria, South Africa since March 2009 and is the Director of Advanced Sensor Networks (ASN) lab.Nanonetworks: A New Frontier in Commu-nications
• Vahid Tarokh: Full Professor at Harvard University, USA. Area Dean for Electrical Engineering. Hammond Vinton Hayes Senior Fellow of Electrical Engineering, and a Perkins professor.Spectrum Sharing: Past, Present and Fu-ture
> Working group workshopsCommon actions are carried out on the 3 research topics. Each research topic has several themes, and each theme is associa-ted with two coordinators.The research topic workshops (or working group): Scientific coordination and scientific dis-cussions aimed at revealing issues in order to then receive replies to calls for projects. These could be in the form of seminar-type presentations or case studies.
> Calls for projectsSeveral calls for projects are launched in accordance with a yearly schedule:> PhDs and postdocs> Visiting chairs (permanent call)> Chair of Excellence> Master’s scholarships> Challenge teams
15

16 Labex MS2T Activity Report 2013-2014
Systems of systems, which consist of a set of entities that interact to achieve a particular goal, communicate and cooperate in building an infrastructure of information exchange (communication network). Research topic 1 deals with communication and cooperation between entities, taking into account the problems of transporting information in wired and wireless environment and ensuring data security, reliability, and interaction and coor-dination among the entities. This Research topic 1 also addresses the issues related to distributed processing of data generated by the entities of the system of systems.
In the initial phase of the project, we defined the roadmap and identified a set of relevant issues in line with the challenges presented in the description of Research topic 1. We orga-nized seminars and working groups to foster synergies among the different teams involved in the project. Then, we set up several projects which we submitted within the framework of the Labex project. We invited world-renowned researchers with whom we started collabora-tions that have been substantiated through joint publications. LABEX Members involved in Research topic 1 also visited internationally renowned laboratories.
Actions in Research topic 1The goals of the first coordination meeting were:
-1- The identification of interdisciplinary topics:The idea behind this first goal was to list all the scientific and technological challenges defined in the project proposal of Labex MS2T in order to refine them, while creating synergies among the laboratories involved in the project. Priority was given to defining issues to be addressed in the short term wit-hout requiring that researchers from different laboratories share a common background. Then, every four to six months, we tried to get a better vision to plan a longer-term research activity (grant application, response to calls for proposals, etc.). To achieve this goal, the Research topic 1 steering committee (com-posed by the manager of the topic and the three sub-topics) decided: •Tomakealistofresearchissuesinvolvingspecific skills and match them up with the individual and group competencies, in order to identify promising interactions between the three laboratories. Then, from this list, we set the priorities and identified the additional values. • To clarify the scope of application, thedegree of maturation, and the advancement of various projects. •Toestablishworkinggroupmeetings:verygeneral presentations on the various fields covered by Research topic 1 and discussions.
Through these discussions, we identified several issues: energy saving in sensor and actuator networks, distributed and heteroge-neous data merging, robust and secure com-munication between systems, and systems of systems applications.
-2- Preparation of research projects:After a phase of exchange between members involved in Research topic 1 (steps above), some tracks of subjects were identified and several innovative projects were submitted in-volving colleagues from different laboratories.
16
Communication Control
Microsystems
Sensors andActuators
Wireless
Co-operate
Scientific Review and Perspectives by Research Topic
> Research topic 1: Interaction and cooperation between systemsManager: Abdelmadjid Bouabdallah

Sci
entifi
c R
epo
rt
17Labex MS2T Activity Report 2013-2014
-3- International collaborations:One of the tracks that we considered to increase the visibility of Labex MS2T is the establishment of international collaborations with world-renowned researchers. This can be done either through visits to prestigious la-boratories and/or inviting foreign researchers.
We invited: • Ahmed E Kamal (IEEE Fellow), from Iowa State, who visited Labex for one month. During this time, he presented two seminars and conducted fruitful works with several members of Labex MS2T. Currently, we keep working with him on several issues rela-ted to sensor networks and optimization of resources. A publication in collaboration with Professor Kamal has been accepted in the international journal Computer Communica-tions.
•Arturo Zavala-Rio has collaborated with Labex members on the consensus problem and flocking in multi-agents systems that can be applied to a fleet of UAVs. The study has already given rise to a paper that was presented at the ICUAS 2014 conference in Orlando in May 2014, with the title: “Flocking of Multiple Unmanned Aerial Vehicles by LQR Control”. Future joint research work and ex-periments are in progress.
•Ahmet Sekercioglu who conducted joint research with MS2T Labex members. This collaboration has led to the preparation of a Special Issue for the MDPI Sensors on “Visual Sensor Networks” and two papers: “Depth map compression for multi-robot systems” to be submitted to the IEEE Transactions on Circuits and Systems for Video Techno-logy and “Collaborative Communications for Mobile Visual Sensor Networks”, which has been submitted to the IEEE Sensor journal.
•Ian Akyildiz, with whom two joint papers are in preparation on “3D localization for flying robots” and “Quality of Service in aerial com-munications”. Furthermore, Professor Akyildiz helped to prepare a special issue on “Vehicu-lar Networking” which has been submitted to an international journal.
Moreover, Y Challal visited the Imperial College (UK), where he initiated a new collaboration on energy conservation in sensor networks by taking into considera-tion some environmental parameters such as temperature. New results have been obtai-ned and published in joint publications in IEEE Transactions on Parallel and Distributed Systems and IEEE Communications Letters.
Selected results Under this Research topic, several research projects have yielded results, which are not all presented in this document. We can cite:
-1- Sensor networks architectures:
• Sensor network architectures for functional reeducation:The SUPGEST project aims to develop a wi-reless sensor network architecture for func-tional reeducation. To acquire the kinematic trajectories of musculoskeletal model as well as those of the physical therapy, a wireless sensor system has been designed and deve-loped. This sensor system captures the mo-vement of markers fixed on the subject during an exercise in rehabilitation. This system was developed using the «Shimmer» platform and acceleration sensors. The first configuration of this system comprises three sensors that have trajectories of a segment. A GUI (Gra-phical User Interface) acquisition has been developed on the Tiny OS and on the Java programming language. This interface allows us to calibrate and configure the sensors at the starting step. Then, this allows us to moni-tor/view real-time trajectories of markers via the acceleration curves on the subject. The quality of service (QoS) has been studied to ensure the proper functioning of the system in situations of failure.
• Energy Saving in wireless sensor networks:We started with a study of existing energy saving solutions and proposed a new classi-fication of the up to date research work using a top-down approach. The obtained results were published in the Computer Networks journal. Then, we proposed two new original energy saving solutions using mobile station and energy transfer mechanisms.
17

18 Labex MS2T Activity Report 2013-2014
• Impact of environmental parameters on the energy consumption in sensor networks:We started a new international collaboration with Imperial College London (Dr. A. Bachir) on cognitive radio in wireless sensor networks. Radio communication is the component that uses the most energy in the lifetime of a sensor network. This network brings a new di-mension to the cognitive radio in terms of the consideration of the environmental context and its impact on the quality of radio links in the configuration of the radio, therefore on energy. Y. Challal and W. Bechkit have each had a one-week stay at Imperial College and have materialized this collaboration through joint publications in IEEE Transactions on Parallel and Distributed Systems (2014) and IEEE Communications Letters (2013).
Instead of sending all the data collected by all the sensors to the sink, which may cause high energy consumption, aggregation is one of the most effective means for saving energy. Thus, it is necessary for the raw data received by a node to be transformed through an aggre-gation function (such as max, min, average) to transmit just the relevant information. This approach reduces the number of transmit-ted messages and, consequently, the energy consumed for performing such transmissions.In the next section, we present our contribu-tion on data aggregation in wireless sensor networks.
-2- Resilience in sensor networks:
• We also addressed the issues of resi-lience and security of multipath routing. We proposed a new security solution for the construction of multi-path routes. Resilience is improved naturally through multiple paths built to carry data from the source to the collector («sink»). This paradigm makes it possible, in case of failure or attack, to reduce the recovery time by switching the flow to an alternative route before construction. It can also improve the robustness in a proactive manner by transmitting redundant data on alternative paths. We published preliminary results in the Journal of Network and Compu-ter Applications (2011).
•Althoughaggregationeliminatesduplica-tion of data, it makes verifying the integrity of the data difficult. Indeed, this process allows the intermediate nodes to modify the original data. Through the elimination of redundancy, it could erase the «control data» that could be
used to verify the integrity of received data. Instant fault/attack detection is a required feature that avoids wasting energy in trans-porting faulty and/or compromised data. We initiated an international collaboration on this topic and proposed an original distribu-ted and efficient solution allowing real-time integrity control over aggregated data in sensor networks. We published this solution in the Journal of Parallel and Distributed Computing (2012).
-3- Security and trust in SoS:
We have developed an analytical study of existing trust models developed for dynamic networks and identified and developed a new trust model for these systems. Moreover, we studied Internet of Things threats and vulne-rabilities and proposed a new trust approach solution. We also developed two new key pre-distribution solutions that feature resilience to node compromise and improved scalabi-lity. We initiated a collaboration with Harvard University on this topic, which culminated with the publication of interesting results in IEEE Transactions on Wireless Communica-tion (2013).
-4- Mobile communication in free-space by wavelengths multiplexing: Wireless optical technology is an alternative, or can be complementary, to radio frequency wireless systems, and has many advantages such as high bandwidth, information confine-ment and no license. This is a very attractive solution given the increasing congestion of the RF spectrum and the need for security. Additionally, using optical links reduces elec-tromagnetic interference, which can be an important issue for many sensible environ-ments such as hospitals or aircrafts. This technology constitutes an indispensable part of future wireless eco-systems in the field of Internet of things. We developed a high-speed communication solution based on wavelength multiplexing in the wide band 400-1550 nm, which allows us to achieve Gigabits/s in a free space. This solution, suitable for mobile robo-tics due to fibreless components, is under patent. Moreover, for low rate application, the use of wavelengths multiplexing in free-space for data securisation is currently being inves-tigated.
18

Sci
entifi
c R
epo
rt
19Labex MS2T Activity Report 2013-2014
Sci
entifi
c R
epo
rt
19
-5- Distributed data fusion:We have developed a robust algorithm for distributed data fusion in a context of mobile ad hoc networks. This algorithm, developed for Vehicle-to-Vehicle (V2V) communication, allows us to detect a sybil attack against the network and to implement map fusion. The main objective of this solution is to increase the field of vision of a car using dynamic map exchange.
-6- Robust inter-UAV communication for formation flights:Given the sensitive nature of inter-UAV com-munications and missions, it is necessary to secure these communications. Furthermore, robustness becomes an essential element of the communication architecture to ensure continuity of formation flight despite the possible malfunction of one or more drones. Failures in such a system can occur at two levels: equipment or transmission. Initially, we focused on the latter type of failure. Indeed, wireless transmissions are prone to frequent packet loss (collisions, obstacles, mobility and topology change, etc.). To develop a robust communication architecture at any level, it is necessary to analyse the impact of the choice of communication protocols at all protocol layers. In this context, we conducted a study of the impact of protocol access to the radio channel on the quality of the control law of drones. We considered a simple control law that converges to an average value. The first simulation results demonstrate that the TDMA protocol allows faster convergence with fewer oscillations. Indeed, TDMA suf-fers less from collisions and is suitable for real-time communications. We will continue to characterize the impact of communication protocols at different scales on the law of inter-UAV control. This analysis will allow us to offer a more robust and secure architecture of inter-UAV communication with potential most appropriate new protocols.
We have also developed and tested naviga-tion algorithms of a group of UAVs in order to obtain a self-organizing system that can conduct several tasks by avoiding mutual collisions. We have simulated the mainte-nance of a coordinated system of UAVs.
-7- Network of micro-actuators for optical fibre interconnection: The increase of bit rates in communication networks is accompanied by the development of switches and routers. For that purpose, optical switches are being developed to avoid the electro-opto and opto-electro conversion and to increase the bitrate of optical network. In the literature, many fibre optical switches have been presented in recent years (1 x 2 switches) based on different technologies with different characteristics such as switch speed, extinction ratio and cross talk. Some other characteristics such as cost, energy efficiency and size (number of input and out-put channels) are also considered. Digital ac-tuation is mainly used in the design of optical switch due to their advantages. A digital ac-tuator switches only between discrete known and repeatable positions; all intermediate po-sitions are only transient states. For switches, these discrete positions generally correspond to the ON and OFF commutation states.We developed an optical fibre switch based on a digital actuator with four discrete posi-tions. These discrete positions are obtai-ned through a magnetic holding of a Mobile Permanent Magnet (MPM) placed in a square cavity. Then, no sensor has to be used to maintain the four stable states of the switch (open loop control). This digital actuator is used as a base for a 1× 4 fibre optical switch by fixing a prismatic mirror on the top of the MPM. A matrix of this elementary unit can be easily obtained to create a N×N optical fibres switch in the future.
New projects
As a result of various meetings, the following project proposals were submitted and selec-ted following the call for Labex MS2T projects:
-1- Coded optical communication wave-length:The objective of this project is information encoding using optical wavelength to deve-lop the leanest communication protocols. The idea is to find alternatives to the radio frequency (wireless) communication channel, more transparent to electromagnetic interfe-rence.

20 Labex MS2T Activity Report 2013-201420
-2- Economy of energy in the networks of sensors and actuators:In this project, we propose to develop crea-tive solutions to the energy problem in sen-sors/actuators networks, which are important components of systems of systems. Indeed, the depletion of energy from one compo-nent prevents one or more sensors/actuators from reacting in critical situations, thus jeo-pardizing the operation of the system. The solutions that we are developing will greatly increase the life of the network, thus avoiding human intervention at regular intervals. They will also help to prevent disasters, especially in the case of real-time critical applications, and ensure continuity of service when some sensors/actuators fail due to battery deple-tion or failure.
-3- Distributed algorithms and belief theory:Various algorithmic techniques have been proposed (or are under study) to counteract disturbances and ensure that a given distri-buted system meets its specifications. In par-ticular, recent work has focused on the use of belief theory in networks. This work is the beginning of a new approach to distributed algorithms, as belief theory can bring a lot to the diagnosis and control of distributed systems on the one hand, and to the design of algorithms resistant to interference on the other hand. This project aims to study distri-buted data fusion with emphasis on distribu-ted systems. We will focus on the contribution of belief theory in this field of research, espe-cially for the management of replicated data.
-4- Reactive navigation of drones in interaction within a fleet:This project aims to integrate and experimen-tally validate developments for the collision and the flight of several drones (quadrotors). We propose to study fast and appropriate methods for the integration of algorithms on board the aerial vehicle. Computing time and real-time constraints are important issues to be taken into account for this type of appli-cation. The project also includes an experi-mental aspect of integrating the techniques developed on existing experimental platforms (helicopters with four rotors) with basic capa-bilities, as part of the “Equipment of Excel-lence” project ROBOTEX. In response to the ANR call CONTINT’2013, we also submitted a research project, ARMADA, which focuses on the Algorithms for Mobile Networks and
Applications to Aerial Vehicles. The objective of the project is to deploy a perpetual fleet of aerial vehicles able to monitor continually an infrastructure covering a wide area.
-5- Supervision of an area without direct radio link with the operator:The scientific community has been interested for several years in autonomous navigation systems and collaboration between robots. Many projects in this area are in progress in Europe and in the rest of the world. Recent technological developments have spurred great interest in autonomous aerial vehicles, also known as drones or UAVs (Unmanned Aerial Vehicles). The missions of this type of system include the exploration of an area or building, military operations, traffic control, gaming applications, carrying heavy loads of search and rescue of people in distress, aerial surveillance, and the exploration of space and the ocean. Following the increase in compu-ting power as well as wireless communication and nanotechnology, it is becoming more and more interesting to replace a complex system by a multi-agent system in which agents interact through an interconnect structure. It is therefore important to study new problems such as the coordination and control of several UAVs, monitoring a lea-der, and formation flying. Potential applica-tions of a group of autonomous vehicles are beginning to expand across disciplines with industrial civil and military applications.
-6- Study of semantic models for managing lifecycle (PLM) application using MEMORAe:In the context of Knowledge Management, the MEMORAe approach proposes a gene-ric model and knowledge capitalization envi-ronment (E-MEMORAe2.0). In this approach, knowledge capitalization is centred around a repository represented by ontologies and knowledge access is possible through well-

Sci
entifi
c R
epo
rt
21Labex MS2T Activity Report 2013-2014
Sci
entifi
c R
epo
rt
21
defined workspaces and different points of view. Thus, knowledge is available to those interested, depending on the context (or need). The MEMORAe-core model therefore meets some of the needs of PLM, but it needs to be extended to take into account all the characteristics of this application area. In this context, we have set the following objectives:
•Reviewing thestate-of-the-artabout theuse of ontologies and models to support the PLM process as defined;
•Establishinganontologicalmodelcorres-ponding to the analysed process (alignment of existing models);
•ExploringtheuseofsuchamodelintheMEMORAe2.0 platform and, if necessary, determining which features to develop.
-7- Internet of Things Security (towards a robust interaction of systems of sys-tems): In this project, we aim to design the architecture and security mechanisms for the internet-of-things. The architecture takes into account the resource constraints of tiny things and their integration in the control of complex systems-of-systems. Therefore, we will consi-der a context-aware approach that leverages environmental and context inputs for efficient and robust security countermeasures.
Presentations in working groups
Several meetings have been organized by participating members to address scientific issues related to the research program of the Research topic. In addition, working group meetings open to all members of the Labex MS2T have been organized. These meetings have given rise to very rich discussions. Pre-sentations during these working groups are as follows:
• A. E. Kamal, “Advances in Network Coding-Based Self-Healing in Autonomic Networks”, 25/06/2012 • V. Cherfaoui, “Sensor data fusion and uncertainty management”, 14/05/2012 •F. Marin, “Human Joint and musculosk-letal modeling”, 26/03/2012 •F. Lamarque, “Networks of micro-actua-tors: the example of the multiple conveyors”, 28/02/2012 • B. Ducourthial, “Distributed algorithms for dynamic networks”, date is missing, 26/03/2013 • Ian Akyildiz, “Research Challenges in Next Generation Cellular Systems: LTE-A and Beyond”, 11/06/2014
• V. Tarokh, “Spectrum sharing”, 11/06/2014 • I. Akyildiz, “Nano-communications and Internet of nano-things”, 3/7/2014
AWARDS: •WalidBechkit,obtainedoneof theBestPh.D. thesis awards from UTCand A. Hadjidj was one of the finalists.
Conclusion
The research activities conducted within Research topic 1 are rich and strategic for Labex. The strong momentum of the partici-pating members makes the activity intense, and members deal with all the challenges set out in the description of Research topic 1, bringing promising results.
> Research topic 2:Uncertainty management Manager: Sébastien Destercke
Research topic 2 concerns the management of uncertainties in systems of systems.
Such uncertainties can have different natures, e.g., aleatory (due to natural variability) vs epistemic (due to a lack of knowledge), objec-tive (measurement error) vs subjective (expert opinions). They can also happen in various aspects of Systems of Systems (SoS), such as the specification, the behaviour or the model of a sub-system, the collected information about the systems, the objectives of the SoS, or in the interactions that may exist between the different systems.
Modelling and handling such uncertainties in SoS presents many theoretical and practical challenges: How can we choose appropriate representations of our state of knowledge that are theoretically sound and computa-tionally efficient? How can we improve the performance of existing inference algorithms in terms of approximation quality, efficiency? How can we make decisions involving mul-tiple objectives and systems under uncer-tainty?
Research topic 2 activities mainly focus on the following problems: •Numericalmodellingandpropagationofuncertainties;

22 Labex MS2T Activity Report 2013-2014
• Learning, forecasting and selecting optimal systems under uncertainty; •Informationfusion.For each of those, we briefly describe the goals and some of the results obtained within the LABEX framework (including sponsored or related projects), as well as future planned activities.
Numerical modelling andpropagation
The performances of SoS (power-grids, robots fleet, buildings, medical units, sensor networks) often depend on ill-known variables (e.g., wind force, distance to obs-tacles, muscle strength) in uncertain quan-tities, which can serve as input or output depending on the system. Modelling and propagating those uncertainties through a model pose many problems, among which: • Elicitation and experimental design: collecting and modelling expert opinions as well as uncertainty related to human activities play an essential role in SoS modelling, espe-cially when data is scarce such as in risk ana-lysis, at early-stage design or when using new technologies. Similarly, it is essential to iden-tify, through experimental design, the most sensible variable on which further information would be needed. This could be used to build reliable surrogate models easier to manipu-late than initial complex models, for example. • Direct and Inverse propagation: directpropagation consists in predicting output uncertainty based on input uncertainty, and is often used to predict the performance or the risk associated with some systems. On the other hand, inverse propagation consists in identifying the input parameters of sys-tems when only observing the outputs, and is essential to identifying the behaviour of a given system (e.g., biological, mechanical) based on measurements. The latter is often trickier to achieve since it requires inversing the model.
In SoS, these problems are usually more severe than in traditional systems, due to their highly multivariate nature and to the presence of strong dependencies and interactions between their components.
Selected activities
Parameter identification in complex mechanical structures:This activity concerns the problem of iden-tifying parameters of mechanical structures given some uncertain output measurements. This is a challenging task for multiple reasons: output values are often uncertain and models are only approximations of experiments. Fur-thermore the complexity of the latter requires heavy computations and the development of efficient methods to perform the identification of the inputs based on the outputs. LABEX members have therefore worked on deve-loping methods that are both more general and more efficient in order to achieve these tasks. Among these we can mention the fol-lowing: • Liqi Sui’s thesis on “Uncertainty pro-pagation in mechanical models: structure computation and identification in an uncertain environment”, supervised by P. Feissel and T. Denoeux. This Thesis considers the fairly new matter of using new and more general uncertainty models (belief functions) to per-form both direct propagation and parameter identification. Beyond the technical challenge it represents, using belief functions will allow analysts to have refined information about the uncertainty of the parameters. • Shaojuan Huang’s thesis on “Multi-scale identification of composite materials”, super-vised by P. Feissel and P. Villon. This thesis looks at a new way to deal with ill-posed iden-tification problems where measurements are imprecise: rather than modeling uncertainty on the output measurements, their approach is to relax or to “soften” some constraints imposed by the physical equations involving the most uncertain variable, therefore turning the initially hard constrained but infeasible problem into a soft constrained but feasible problem.
Uncertainty propagation in bio-medical Sos:This activity concerns multidisciplinary inte-raction between Heudiasyc and BMBI, and generally focuses on problems related to the concept of in silico medicine. Among other activities within this field, we can mention: • HOANG Tuan Nha’s thesis on “Modelling the uncertainty of biomedical and biomecha-nics data and its propagation in the diagnosis models of musculoskeletal system patholo-gies”, supervised by M.C. HO BA THO, T. De-noeux and T.T. DAO. This Thesis focuses on
22

Sci
entifi
c R
epo
rt
23Labex MS2T Activity Report 2013-2014
the handling of data to make a better diagno-sis by using multi-modal diagnosis models and propagating information through them. • During Scott Ferson’s visit, a meeting was organized with M.C. Ho Ba Tho, T.T. Dao and S. Destercke to discuss current works and possible future interaction. One central topic that was discussed is model uncertain-ty.
Reliability and design of SoS:an important part of Research topic 2 activity focuses on the issue of reliability within SoS, with a particular application to railway sys-tems. Many activities are linked to this issue: • Siqi Qiu’s thesis on “Reliable design methodology of Systems of Systems in the presence of uncertainty: Application to trans-port systems”, supervised by M. Sallak and W. Schön, proposes a reliability model inclu-ding both networks and human failures. Uncertainty modelling is achieved through the use of Belief functions and graphical models. • TheORUs DEFI project (S. Destercke, M. Sallak and M. Poss) focuses on formal methods to design SoS with optimal reliabi-lity under severe uncertainty. This includes considering unknown interactions between sub-systems or components, as well as com-plex designs, with a concern for both theore-tical as well as practical tools. •TheANR project RECIF (PI: M. Sallak), sponsored by LABEX, focuses on railway systems, and includes a whole task (leader S. Destercke) centred on uncertainty modelling and elicitation. •Thevisit of S. Ferson was an opportu-nity to develop new research paths using the recently developed concept of c-boxes within reliability studies.
Evaluating climate change is an essen-tial activity in future SoS designs (e.g., solar power grids, dykes and sea-level-rise pro-
tection systems). The thesis of Nadia Ben- Abdallah, “Modelling of uncertainties to adapt coastal works to climate”, although not directly related to LABEX, has a topic directly linked to this preoccupation, and deals mainly with learning models from data and from expert opinions.
Selected publications •S.Huang,P.FeisselandP.Villon: “mul-ti-scale elasticity identification using modi-fied constitutive relation error”. 11th World Congress on Computational Mechanic. 2014. •S.Qiu,M.Sallak,W.Schön,andZ.Cherfi(2014a), «Availability assessment of railway signalling systems with uncertainty analy-sis using Statecharts». Simulation Modelling Practice and Theory 47 (2014) 1–18. •T.N.Hoang,T.T.Dao,T.Denoeux,M.C.Ho Ba Tho. A Clustering Model for the Mus-culoskeletal Disorders with Fused Data from Multiple Sources. 5th International Confe-rence on Computational Bioengineering, ICCB2013 Leuven, Belgium September 11-13. •N.BenAbdallah,N.MouhousVoyneau,T. Denoeux: Using Dempster-Shafer theory to model uncertainty in climate change and environmental impact assessments. FUSION 2013: 2117-2124. • N. Ben Abdallah, N. Mouhous-Voyneauand T. Denoeux. Combining statistical and expert evidence using belief functions: Application to centennial sea level estimation taking into account climate change. Interna-tional Journal of Approximate Reasoning, Vol. 55, Issue 1, Part 3, pages 341–354, 2014. • F. Aguirre, S. Destercke, D. Dubois, M.Sallak, C. Jacob: Inclusion–exclusion prin-ciple for belief functions. International Journal of Approximate Reasoning, In press.
Planned activities
• A post-doctoral position under the supervision of T. Denoeux and on the to-pic of Elicitation and learning with belief functions will start in the course of 2014/2015. Orakanya Kanjanatarakul has been selected for this position. •Nadia Ben Abdallah will join the RECIF project as a post-doctoral researcher on the topic of expert information elicitation. •A thesis fundedby LABEXon the topicof modelling human reliability in SoS will start in 2015, under the supervision of M. Sallak and W. Schön, from Heudiasyc, and F. Van-derhaegen, from the LAMIH laboratory in Valenciennes.

24 Labex MS2T Activity Report 2013-201424
Learning, forecasting and selecting optimal systems
Designing or learning optimal SoS (web-re-commendation systems, prosthesis, sen-sor configuration) with limited information is another commonly encountered yet difficult task, for which modelling uncertainty adds a layer of complexity but provides more robust results. Three typical tasks are: • Learning models from data: when no physical model linking system variables is available, we can attempt to learn relations from the observed data, for instance to re-construct an input/output relation. The obtai-ned models are then themselves uncertain, as they are of statistical nature. • Forecasting the behaviour of a complex system can be achieved based on statisti-cal data, a model of the system, and expert judgements. In any case, it is of the utmost importance to provide a quantitative measure of forecasting uncertainty. • Designing optimal SoS under uncer-tainty requires being able to compare dif-ferent designs. When the SoS performances are uncertain, such a comparison is neither trivial nor always doable, depending on the assumptions made.
As such problems involve decision makers (DMs), whose notion of optimality may vary, a first necessary step is to model (partial) pre-ferences of those DMs. Also, SoS are most often multi-objectives, as SoS and their sub-systems usually have to perform multiple tasks.
Selected activities
Learning under uncertainty with multiple objectives is a usual problem in SoS. Some of the activities related to Research topic 2 aim at tackling this problem, among which we can cite: •The thesis of Puthiya Parambath Sha-meem on “New methods for multi-objective learning”, funded by the Labex and the Picar-dy Region, supervised by N. Usunier and Y. Grandvalet, which deals with the fundamental problem of learning predictive models, offers a good compromise between multiple objec-tives in an efficient manner, using convex op-timization. This allows one to pick, among a set of models, the most suitable for a given task. •The thesis of Gen Yang on “Statistical learning problems with structured data and severe uncertainty”, partially supported by
LABEX through travel grants and supervised by S. Destercke and M.-H. Masson, deals with the issue of finding a good balance of providing informative and reliable yet impre-cise predictions. Indeed, usually, the more a prediction (e.g., in the form of a confidence interval) is precise or informative, the more chances it has to be wrong. Conversely, a cautious prediction will more often turn out to be true, but has to remain informative enough so that it is useful to the decision maker.
Modelling preferences under uncertainty is an important task when optimizing SoS, as the preferences will define which design is preferable, and for which objective/criteria, to another. This problem is one of the main chal-lenges tackled by the DEFI team ORUs, with a particular focus on reliability issues. So far, treated problems include the handling of par-tially known dependencies in reliability stu-dies, as well as the optimization of complex system design, such as consecutive k-out-of-n networks, this last task being the topic of LABEX intern Yanting Lu.A new approach to statistical forecasting has been proposed within the framework of belief functions. In this approach, a predictive belief function is computed from a parametric mo-del and statistical data. The method can be shown to have good theoretical properties, including invariance to parameter transforma-tion and asymptotic consistence. The method generalizes Bayesian prediction, without the need to provide priors.
Selected publications
•G.Yang,S.DesterckeandM-H.Masson(2012). “Nested Dichotomies with probability sets for multi-class classification”. European Conference on Artificial Intelligence (accep-tance rate: 23%). •S.Destercke,G.Yang (2012). “CautiousOrdinal Classification by Binary Decomposi-tion”. European Conference on Machine Lear-ning (acceptance rate: 24%). •O.Kanjanatarakul,S.SriboonchittaandT.Denoeux. Forecasting using belief functions: an application to marketing econometrics. International Journal of Approximate Rea-soning, Vol. 55, Issue 5, pages 1113–1128, 2014.
Planned activities
• Yanting Lu will pursue her internship through a PhD supervised by W. Schön and centred on the problem of optimizing system reliability under severe uncertainty.

Sci
entifi
c R
epo
rt
25Labex MS2T Activity Report 2013-2014 25
• A post-doctoral position on the topic“Design of Multi-Objective Systems Under Uncertainty”, supervised by S. Destercke, will start at the beginning of October 2015
Information fusion
Information fusion is another central problem in SoS that consists in combining information or data from multiple sources to obtain more reliable and precise knowledge of the environ-ment. This issue concerns most if not all SoS when systems communicate their information or where measurements of the same quantity are done by multiple sensors, possibly under different modalities (e.g., laser vs infra-red ca-meras, organoleptic sensations, etc.).
Among the various problems that we have to face in terms of information fusion, issues particularly relevant to SoS are those of dis-tributed and dynamic fusion, in which infor-mation is not necessarily centralized and can reach different sources in an asynchronous way (e.g., in vehicle networks, in evolving sys-tems). Other problems of interest include how to integrate information about the sources, such as reliability and rate of updating, into the fusion process itself.
Selected activities
One of the main activities around information fusion in Research topic 2 is the merging of information in intelligent vehicle SoS, in parti-cular cars. Along this line, we can cite multiple activities, among which: •The thesis of Marek Kurdej, supervised by V. Cherfaoui, which aims at combining mul-tiple sources such as sensor data and existing geographic map to better understand driving conditions, for instance by differentiating sta-tic and moving objects. Although this thesis is not funded by LABEX, it concerns intelligent vehicle collaboration with external sensors, an important applicative field of LABEX. •The thesis of Philippe Xu (supervised by Franck Davoine and Thierry Denoeux) which concerns the fusion of multiple sensors for understanding of the driving scene. The pro-posed approach is based on the representa-tion of all available information in over-seg-mented image regions. The main novelty of the framework is its capability to incorporate new classes of objects and to include new sensors or detection methods while remai-ning robust to sensor failures.
• The post-doctoral research of Jean- Baptiste Bordes which concerns the inclu-sion of prior knowledge in multi-modal sensor fusion for driving scene understanding using evidential grammar, an extension of stochas-tic grammar based on belief functions. The final goal is to provide a refined understanding of the driving scene. •Aspartofthe thesis of Nicole El Zoghby (supervised by V. Cherfaoui and T. Denoeux), a new association method based on belief function has been proposed. Evidence about the possible association of each object pair, usually obtained by comparing the values of some attributes, is modelled by a Dempster–Shafer mass function defined in the frame of all possible relations. These mass functions are combined using Dempster’s rule, and the relation with maximal plausibility is found by solving an integer linear programming pro-blem. This problem is shown to be equivalent to a linear assignment problem, which can be solved in polynomial time using, for example, the Hungarian algorithm.
Selected publications
• M. Kurdej, J. Moras, V. Cherfaoui, Ph.Bonnifait (2014). “Controlling Remanence in Evidential Grids Using Geodata for Dynamic Scene Perception”. International Journal of Approximate Reasoning, vol. 55, num. 1, pp. 355-375. •Ph.Xu,F.DavoineandT.Denoeux.Evi-dential combination of pedestrian detectors. Accepted for oral presentation at the British Machine Vision Conference (BMVC 2014), Nottingham, UK, September 2014. (selection rate for oral presentation: 7.7%). • J-B. Bordes, F. Davoine, Ph. Xu, T. De-noeux: Evidential Grammars for Image Inter-pretation - Application to Multimodal Traffic Scene Understanding. IUKM 2013: 65-78.•T.Denoeux,N.ElZoghby,V.CherfaouiandA. Jouglet. Optimal object association in the Dempster-Shafer framework. IEEE Transac-tions on Cybernetics, to appear, 2014.

26 Labex MS2T Activity Report 2013-2014
Planned activities
The thesis topic “Robust Multi-robots Visual SLAM using Heterogeneous Mobile Cameras Network” supervised by V. Fremont and E. Natalizio, to start in September 2014, is linked to this activity of Research topic 2, and could evolve into a larger project within LABEX.
> Research topic 3: Optimized design of technological SoSsManager: Pierre Villon
This Research topic is organized around three main themes.
In the context of simulating SoS, modelling each of the components and their interac-tions is an essential task. We are not only considering blackbox-type models, but also phenomenological approaches, connected with physical laws and experiments.
In the theme “Optimizing multi-level and multi-physics”, the main issues are parame-tric multi-level and multi-scale mechanical systems optimization, cooperative multi-com-ponent systems (in conjunction with Research topic 1) and taking into account uncertainties (in conjunction with Research topic 2). The identified applications include micro-macro models optimization, systems with a large number of degrees of freedom and meta-mo-dels, systems and augmentative aids, aids to rehabilitation and functional characterization of biomechanical systems.
In the theme “Scheduling and synchronizing mobile subsystems”, the major scientific issues are scheduling problems broken down into phases of planning, mixed integer opti-mization, robust optimization and the inclu-sion of random data. Applications include the optimization of multimodal transport problem platforms.
Finally, the theme “Dependability systems technology systems” addresses major issues taking into account uncertainties in SoS, in particular the dependence between sub-sys-tems and the formalization of the concept of optimal safety. Among the applications that will be addressed, we can mention rail sys-tems and safety in other types of networks (urban for example).In the short term (three years), the following subjects appear as priorities: (1) identification
of the mechanical properties of suspended capsules by optimization methods, (2) mixed integer optimization for different applications, (4) safe design and robust systems of sys-tems, and (5) multiscale modelling of biome-chanics systems. The first topic is the subject of a thesis started in September 2012 entitled “Capsules capillary flow in a complex sys-tem”. A collaborative relationship on subject (2) began on linear integer programming for structural optimization.
Summary of the two PhD theses in progress
-1- Modelling of the flow of capsules through a capillary network
Description of the project: Capsules, which are droplets enclosed within a thin deformable membrane, are naturally present in the human body (e.g., red blood cells). They are also largely used in industry. Among all the applications, one can highlight their use as vectors for drug targeted thera-pies as well as chemoembolization. Although these new techniques are already used on patients, they remain empirical. There is a need for numerical models to be developed to predict the flow and behaviour of a cap-sule suspension once injected, and the distri-bution of the particles in the microcirculation. This problem is complex: the motion of each capsule results from the strong fluid-structure interactions (between the internal and exter-nal fluid and the deformable membrane) and from the interactions between the neighbou-ring capsules.
The objective of the project is to create a reduced model of a capsule flowing in a bi-furcation, considering the case of a dilute suspension. Microfluidic experiments will be conducted in a symmetric Y-shaped bifurca-tion: dilute suspensions of capsules will be flowed in a bifurcated microchannel made
26

Sci
entifi
c R
epo
rt
27Labex MS2T Activity Report 2013-2014
with a square cross-section. We will follow the deformation of a capsule as it passes through the bifurcation: the evolution of the capsule cross-section will be determined using image processing tools. A proper orthogonal de-composition (POD) technique will be applied on the time-evolution of the capsule profile.The POD technique will be validated in the case of a straight square-section channel, for which a full numerical simulation model of the fluid structure interactions exists (Hu et al. JFM 2012).
Keywords: Capsules, bifurcated network, fluid-structure interaction, Proper Orthogonal Decomposi-tion (POD), microfluidic experiments
State of progress, results: An experiment has been set up to study the deformation of a dilute capsule suspension flowing in a bifurcation in order to obtain a library of capsules’ deformed shapes. Micro-fluidic Y-shaped channels were produced and characterized. The microcapsules, which consisted of a protein-reticulated membrane, were flowed in the microchannels under a flow-rate- or pressure-controlled flow. The capsule shapes were recorded using a high-speed camera (Figure 1a). An automatic contour detection is being developed to extract the profiles from the experimental images (Figure 1b). It uses a special background subtraction algorithm, as classical image processing tools are ineffective in this case: the images have a too low contrast to allow membrane detec-tion. The algorithm learns which image pixels belong to the fixed environment (background), which allows us to detect the moving particles even with low contrast. The algorithm has so far proven quite efficient and more precise than other methods previously tested, but the method has to be tuned to be reliable in a large range of cases. We identified the capsules’ mechanical beha-viour through the microfluidic experiments in order to relate the measured deforma-tion to the capsules’ mechanical properties. We applied the microfluidic technique that we had developed during the first year of Benjamin Sévénié’s PhD (Hu et al. PRE 2013): the mechanical properties are deduced from the comparison of the experimental defor-med profile with numerical predictions using an inverse method approach. An issue that we have encountered is the lack of squa-reness of the microchannels associated with the inherent imprecision of the fabrication technique: the photolithography procedure
can only guarantee a 5% precision on the geometry. We have run a numerical study in order to see the influence of the non-squa-reness on the robustness of the identification technique. Numerical simulations of a capsule flowing in slightly rectangular channels have been run. We have established that a 5% deviation from squareness does not signifi-cantly impact the capsule deformation. Any deviation above this percentage affects the precision of the method.
Further work, schedule (for PhD students): The Proper Orthogonal Decomposition method will be implemented from the experimental database of capsule deformed profiles. We will determine how many modes are necessary to describe the deformation of a capsule with a chosen error. We will test the ability of the method to fit any experimental profile that is not in the initial database. The reduced model will be validated applying the POD technique on 3D numerical capsules moving into a square straight channel. It will indeed be possible to compare the results with exact simulations. The objective is then to replace the Finite Element Method solving of membrane mechanics in the existing fluid-structure simulation code by the equivalent reduced model and to implement the cou-pling between it and the fluid solving. This will be the proof of concept applying to a bifurca-ted channel.
Publication in international journal: • Hu X.-Q., Sévénié B., Salsac A.-V., Leclerc E., Barthès-Biesel D. Characterization of membrane properties of capsules flowing in a square-section microfluidic channel: ef-fects of the membrane constitutive law. Phys. Rev. E. 87, 063008 (2013).
Presentation at international conferences: •SalsacA.-V.,HuX.-Q.,SévéniéB.,LeclercE., Edwards-Lévy F., Barthès-Biesel D. Flow of a microcapsule suspension in a square microchannel: characterization of the capsule
27
Figure 1: a. Image of a capsule entering the bifurcation.b. Acquisition of the capsule profile through image processing

28 Labex MS2T Activity Report 2013-2014
mechanical properties. Euromech Colloquium 544 Dense Flows of Soft Objects, Grenoble, France, 13-15 May 2013, p.31-32.
•SévéniéB.,SalsacA.-V.,Barthès-BieselD. Characterization of the capsule membrane properties in a microfluidic square channel: effect of a geometrical deviation. Journées GDR3570 MECABIO. Paris, 24-25 June 2014.
•SévéniéB.,Barthès-BieselD.,SalsacA.-V. Flow of a capsule in a channel: effect of non-squareness. Euromech-IUTAM Sympo-sium on Dynamics of Capsules, Vesicles and Cells in Flow DynaCaps2014, Compiègne, France, 15-18 July 2014.
-2- Reliable design methodology of Systems of Systems in the presence of uncertainty: Application to transportation systems
In our work, a European Rail Traffic Mana-gement System (ERTMS) is considered as a System-of-Systems (SoS) and we propose to model it using Unified Modeling Lan-guage (UML) Statecharts. Then, we define the performance evaluation of the SoS in terms of dependability parameters and average time spent in each state (working state, degraded state and failed state). The origina-lity of this work lies in the attempt to consider the ERTMS Level 2 as an SoS and to evaluate its dependability parameters by considering the failure of the whole SoS as an emergent property. In addition, human factors, network failures, Common-Cause Failures (CCFs) and imprecise failure and repair rates are also taken into account in the proposed model.
When modelling systems in Statecharts, two kinds of epistemic uncertainties may exist in the model: epistemic parametric uncer-tainties and epistemic state uncertainties. A methodology based on two-phase Monte Carlo simulation is proposed to evaluate the availability interval of the system, taking epis-temic parametric uncertainties into account. Two approaches are proposed to evaluate the availability of systems taking state uncertainty into account: the analytic method based on belief functions theory and linear equations to obtain belief masses of component states, and the simulation method based on belief functions theory and UML Statecharts.
Though Statecharts are dynamic and suitable to model dynamic behaviours of the SoS, they can’t handle the parametric uncer-tainties represented by belief masses. This
forces us to find another tool which could deal with all kinds of uncertainties. We have proved the feasibility of the Valuation-based Systems (VBS) method. A VBS is a formal mathematical system for representation of and reasoning with knowledge. It is made up of two parts: a static part that is concerned with representation of knowledge, and a dy-namic part that is concerned with reasoning with knowledge. The static part consists of variables and valuations. Valuations are the relationships between variables. They could be probabilities, belief masses, etc. We have modelled the ERTMS Level 2 in VBS and ana-lysed uncertainties using the belief functions theory. A dynamic VBS approach is also pro-posed to evaluate the performance over time.
A protocol is developed to evaluate the human error probability on the railway platform RCCS (Route Control Centre System). Five experimental subjects partici-pated in the experiment. The results of the experiment were analysed by a traditional probability method and by the VBS method.
Thesis work on human factors is going to take place in the near future, beginning in Septem-ber 2014.
References:
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-boulanger, “Availability assessment of railway signalling systems with uncertainty analy-sis using Statecharts”. Simulation Modelling Practice and Theory 47 (2014) 1–18.
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-boulanger. “Modeling of ERTMS Level 2 as an SoS and Evaluation of its Dependability Para-meters”, IEEE Systems Journal. To appear in 2014.
•S. Qiu, M. Sallak, W. Schön, and R. Sa-cile. “On the application of Valuation-Based Systems in the assessment of the probability bounds of Hazardous Material transportation accidents occurrence”, Safety Science. To appear in 2014.
28

Sci
entifi
c R
epo
rt
29Labex MS2T Activity Report 2013-2014
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-boulan-ger, “Modélisation et évaluation de la disponibilité d’un système de signalisation ferroviaire ERTMS niveau 2”. In 10ème Congrès International Pluridisciplinaire Qua-lité et Sûreté de Fonctionnement, QUALITA’2013. pp. 451-458. Compiègne, France. March 2013.
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-boulan-ger. “Epistemic parametric uncertainties in availability assessment of a Railway Signalling System using Monte Carlo simulation”. European Safety and Relia-bility Conference, ESREL, Amsterdam, October 2013.
• S. Qiu, M. Sallak, W. Schön, and Z. Cherfi, “Epistemic parametric uncertainties in availability assessment of a Railway Signalling System using Monte Carlo simulation”. In European Safety and Reliability Conference, ESREL 2013. pp. 3003-3011. Amsterdam, Netherland, October 2013.
•S. Qiu, F. Aguirre, F. Vanderhaegen, W. Schön, M. Sallak, R. Nedjemi, “On the efficiency of learning and cooperation processes in ADAS”. In 10th Human-Machine Systems workshop, Berlin, October, 2013.
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-bou-langer. “Dynamic reliability modeling using Valuation-Based System”. 19th World Congress of the Interna-tional Federation of Automatic Control, IFAC 2014. Cape Town, South Africa, August 2014.
•S. Qiu, M. Sallak, W. Schön, and Z. Cherfi-boulan-ger, “Modélisation et vérification de propriétés de sé-curité d’une infrastructure ferroviaire à l’aide des Sta-techarts”. In 19ème congrès de maîtrise des risques et sûreté de fonctionnement, Lambda Mu 19. Dijon, France. October 2014.
Ongoing and future work
The various industrial simulation tools developed over the past few years have had a limited impact on the design of complex systems made up of several subsystems. While tools for modelling each subsys-tem are gradually becoming more sophisticated, the general optimization of systems has been hampered by methodological, organizational, informational, and numerical difficulties. This field aims to build methods and tools to address the following topics:1. Multi-level and multi-physical optimization of a set of complex systems, 2. Scheduling and synchronizing mobile subsystems.
-1- Optimized design of Technological SoS
Optimizing multi-level and multi-physics SoSs is a very complex task that cannot be achieved in reaso-nable time without an appropriate strategy. The most common approaches are:
• Dividing the problem into sub-problems with asequential coupling in the optimization strategy.
•Usinghierarchicalnestedmodels.
•Usingresponsesurfaceswithaspecificinterpola-tion: RBF Krigging, Diffuse Approximation…
•Usingamodelwithasuitablelevelofdescription.In the case of discrete variable problems, we must also take into account the difficulties related to the combinatorial explosion and propose reasonable so-lution complexity.
Regarding the topic “Multi-level and multi-physical optimization of a set of complex systems”, the main contribution lies in the use of original techniques of Model Reduction based on Proper Orthogonal Decomposition (POD). The POD can be seen as an updated version of the well-known PCA (Principal Component Analysis). Three very recent examples of large-scale optimization problems are:
•Thea-Manifoldparameterizationapproach;
•Modelselectiontechniquesappliedtostructuralreliability using bilevel hierarchical metamodels;
•Optimaldesignofurbanpatternstoimprovetheenergetic performance of the buildings.
Related publications:
•Balaji Raghavan, Piotr Breitkopf, “Asynchronous evolutionary optimization using high-quality surro-gates: application to an air-conditioning duct”, Engi-neering with Computers, 2012, doi: 10.1007/s00366-012-0263-0.
• Balaji Raghavan, Piotr Breitkopf, Pierre Villon, “POD-Morphing : an a posteriori grid reparametriza-tion method for shape optimization”, European Journal of Computational Mechanics, Vol.19, No.5-7, pp.671-697, December 2010, doi : 10.3166/ejcm.19.671-697.
• Balaji Raghavan, Manyu Xiao, Piotr Breitkopf, Pierre Villon, “Implicit constraint handling for shape optimization with POD-Morphing”, Euro-pean Journal of Computational Mechanics, Vol.21, No.3-6, pp.325-336, December 2012, doi : 10.1080/17797179.2012.719316.
• Balaji Raghavan, Mohamed Hamdaoui, Manyu Xiao, Piotr Breitkopf, Pierre Villon, “A bi-level meta-modeling approach for structural optimization using modified POD bases and diffuse approximation”, Computers & Structures, 2012, doi : 10.1016/j.comps-truc.2012.06.008.
•Balaji Raghavan, Piotr Breitkopf, Yves Tourbier, Pierre Villon, “Towards a space reduction approach for efficient structural shape optimization”, Structural & Multidisciplinary Optimization, 2012, doi: 10.1007/s00158-013-0942-5.
•Balaji Raghavan, Liang Xia, Piotr Breitkopf, Alain Rassineux, Pierre Villon, “Towards simultaneous
29

30 Labex MS2T Activity Report 2013-2014
reduction of both input and output spaces for interactive simulation based structural design”, Computer Methods in Applied Mechanics and Engineering, accepted with minor revisions, 2013.
• Filomeno Coelho, R., Lebon, J., and Bouillard, P. (2011a). Hierarchical stochastic metamodels based on moving least squares and polynomial chaos expansion - application to the multiobjective reliability-based optimi-zation of 3d truss structures. Structural and Multidisciplinary Optimization, 43(5):707–729.
• Lebon, J., Le Quilliec, G., Breitkopf, P., Coelho, R. F., and Villon, P. (2013a). A two-pronged approach for springback variability assessment using sparse polynomial chaos expansion and multi-level simulations. Inter-national Journal of Material Forming, pages 1-13.
• Lebon, J., Le Quilliec, G., Filomeno Coelho, R., Breitkopf, P., and Villon, P. (2013b). A two-pronged assessment of the springback variability for sheet metal forming applications a two-pronged assessment of the springback variability for sheet metal forming applica-tions. Key engineering materials, 554:957–965.
-2- Optimal design of urban patterns to improve the energetic performance of the buildings
The need to save energy at the urban scale leads researchers to study how numerical simulations and optimization methods can help architects design buildings and districts with the best possible energetic performances, looking at daylight, warming or cooling, and photovoltaic capabilities.
In the present study, we used a physical mo-del of irradiance and an evolutionary algorithm to optimize the distribution of houses inside a fixed area in order to improve the total solar radiation received.
Several objectives can be considered to save energy: during cold periods or in cold regions, as much solar energy as possible should be received by the buildings, but we could also try to minimize energy consumption for air-conditioning, which would imply reducing the solar exposure in hot periods, or we could formulate a multicriteria problem. As a first test, we chose to maximize the irradiance function evaluated during the shortest day of the year, taking into account the influence of the surrounding buildings.
A very simple model of houses was conside-red: the design variables control the space distribution of hexahedral blocks. Buildings are sets of blocks that can be placed in a fi-nite number of discrete positions defined as a mesh of the available domain; the super-position of blocks defines the height of the building. The problem is stated as a topologic optimization one: how to distribute a given volume on a fixed domain in order to optimize an objective function related to the irradiance received by all the external faces. In a second step, more precise designs are searched by varying the orientation and the dimensions of the buildings. The first step is a global opti-mization taking into account only discrete design variables, while the second one can be global or local optimization dealing with discrete or continuous parameters.
30
10
10
10
5
-5-5
-10 -10
5
N 5
0
0
0
10
10
10
5
-5-5
-10 -10
5
N 5
0
0
0
Figure b – Optimal solution for maximising the totalaccumulated amount of sunshine (in hours) on all the surfaces
(December 21st, 8 a.m. to 4 p.m.)
accumulated amount of hours (m².h)
10
10
10
5
-5-5
-10 -10
5
N 5
0
0
0
10
10
10
5
-5-5
-10 -10
5
N 5
0
0
0
Figure a – Optimal solution for maximising the totalaccumulated irradiance on all the surfaces (December 21st,
8 a.m. to 4 p.m.). The symmetric solution is equivalent.
accumulated irradiance
A first example: positioning one building inside a square surrounded by walls

Sci
entifi
c R
epo
rt
31Labex MS2T Activity Report 2013-2014
-3- Scheduling and synchronizing mobile subsystem
Solving problems with scheduling and syn-chronizing mobile subsystems requires the development of new combinatorial optimiza-tion and decision-aid algorithms. In particular, this involves solving fundamental problems such as planning, scheduling, vehicle routing (synchronizing subsystems, choosing modes of transportation, etc.) and network design. Given the complexity and heterogeneity of the nature of the operations or actions to carry out within communicating systems, different resources must be mobilized in a rational and synchronized manner. We are interested in distributed activities that require the sche-duling and coordination of tasks (actions) of mobile subsystems, and cooperation between these systems. This involves jointly resol-ving scheduling and routing problems, while meeting the availability restrictions of each system’s own resources, and guaranteeing the satisfaction of time constraints between various operations.
Results
Robust combinatorial optimization with variable budgeted uncertainty [3]. We intro-duce a new model for robust combinatorial optimization where the uncertain parameters belong to the image of multifunctions of the problem variables. In particular, we study the variable budgeted uncertainty, an exten-sion of the budgeted uncertainty introduced by Bertsimas and Sim. Variable budgeted uncertainty can provide the same probabi-listic guarantee as the budgeted uncertainty while being less conservative for vectors with few non-zero components. The feasibi-lity set of the resulting optimization problem is in general non-convex, so we propose a mixed-integer programming reformulation for the problem, based on the dualization tech-nique often used in robust linear program-ming. We show how to extend these results to non- binary variables and to more general multifunctions involving an uncertainty set defined by conic constraints that are affine in the problem variables. We present a computatio-nal comparison of the budgeted uncertainty and variable budgeted uncertainty on the robust knapsack problem. The experiments show a reduction of the price of robustness by an average factor of 18%.A novel optimal split procedure and an effective PSO-inspired algorithm for the team orienteering problem [2]. Particle swarm optimization (PSO) is an emerging
intelligent optimization algorithm. This paper proposes an effective and robust PSO- ins-pired algorithm (PSOiA) for solving the Team Orienteering Problem (TOP). TOP is a parti-cular vehicle routing problem whose aim is to maximize the profit gained from visiting customers while not exceeding a travel cost/time limit. Our algorithm combines the posi-tion update procedure of the standard PSO with the introduction of extra positions to the swarm. In addition, we use giant tours to en-code particle positions and we propose a new fast procedure to evaluate these positions based on an interval graph model. Experi-ments conducted on the standard benchmark of TOP using the standard testing protocol clearly show that our algorithm outperforms the existing metaheuristics in the literature. PSOiA achieves a relative error of 0.0002% whereas the best-known relative error in the literature is 0.0174%. Our algorithm detects all but one of the best-known solutions. Moreover, a strict improvement was found for one instance of the benchmark.The robust vehicle routing problem with time windows [1]. This paper addresses the robust vehicle routing problem with time win-dows. We are motivated by a problem that arises in maritime transportation where delays are frequent and should be taken into account. Our model only allows routes that are feasible for all values of the travel times in a prede-termined uncertainty polytope, which yields a robust optimization problem. We propose two new formulations for the robust problem, each based on a different robust approach. The first formulation extends the well-known resource inequalities formulation by employing robust programming with recourse. We propose two techniques, which, using the structure of the problem, allow to reduce significantly the number of extreme points of the uncertainty polytope. The second formulation generalizes a path inequalities formulation to the uncertain context. The uncertainty appears implicitly in this formulation, so we have developed a new cutting plane technique for robust combina-torial optimization problems with complicated constraints. In particular, efficient separation procedures are discussed. We compared the two formulations on a test bed composed of maritime transportation instances. These results show that the solution times are similar for both formulations and significantly faster than the solution times of a layered formula-tion recently proposed for the problem.

32 Labex MS2T Activity Report 2013-2014
Affine recourse for the robust network design problem: between static and dyna-mic routing [4]. Affinely-Adjustable Robust Counterparts provide tractable alternatives to (two-stage) robust programs with arbitra-ry recourse. Following Ouorou and Vial, we applied them to robust network designs with polyhedral demand uncertainty, introducing the notion of affine routing. We compared the new affine routing scheme to the well- studied static and dynamic routing schemes for robust network design. It is shown that af-fine routing can be seen as a generalization of the widely-used static routing while still being tractable and providing cheaper solutions. We investigated properties of the demand poly-tope under which affine routings reduce to static routings and also develop conditions on the uncertainty set leading to dynamic routings being affine. We showed, however, that affine routings suffer from the drawback that even totally dominated demand vectors are not necessarily supported by affine solu-tions. Uncertainty sets have to be designed accordingly. Finally, we presented computa-tional results on networks from SNDlib. We concluded that for these instances the opti-mal solutions based on affine routings tend to be as cheap as optimal network designs for dynamic routings. In this respect the affine routing principle can be used to approximate the cost for two-stage solutions with free recourse, which are hard to compute.
Traffic securing issues in telecommu-nication networks: Despite the dazzling success story of the Internet, ossification in the underlying infrastructure has become a major problem hindering development. Network virtualization is a means of de-ossifying the Internet, and is already a hot research topic nowadays. Virtualization is a very successful technique for sharing and reusing resources, resulting in higher efficiency. However, vir-tualization creates problems of heterogeneity and greater complexity in resource manage-ment that need to be addressed. We focus here on traffic restoration in virtual networks and propose a simplified scalable restoration scheme for virtual networks using switches. The scheme is very easy to implement and does not require global information on the state of network. The failure is treated purely locally, and the other nodes in the network do not need to know anything about it or to undertake special actions. In contrast to conventional IP routing schemes, each node routes the traffic on the basis of the entering arc and on the destination. We show that this
is sufficient for dealing with all single link/node failure situations in the network, assuming that the network is two-link (respectively two-node) connected. We model the correspon-ding spare capacity problem with an Integer Linear Program, which can be solved exactly for small networks from the literature.This work is realized in collaboration with Orange Labs.Another issue is to take into account partial failures. Wireless networks with non-interfe-ring point-to-point links such as free-space optical links or microwave links are complex systems and one should take into account several parameters in their dimensioning and functioning. Our work focuses on optimization issues related to traffic protection strategies for such networks in the case of partial mul-tiple link failures, which is when link failures are partial, in other words, when the failing links in general lose only a fraction of capaci-ty. Indeed, in such networks, links are subject to capacity disruptions caused by changing weather/channel conditions that force them to adapt the modulation and coding schemes to the observed condition. To cope with this issue in network optimization, we studied a so-called flow-thinning optimization problem (FTOP), and discussed its properties. It turns out that FTOP, in its general setting, is NP-hard so that its linear programming formu-lations are unavoidably non-compact and require the column generation approach. For that purpose we propose an integer program-ming formulation of the pricing problem ap-propriate for the general case of failure scena-rios. We also show the cases when the pricing problem can be solved in polynomial time.
Related articles:-1- Agostinho Agra, Marielle Christiansen, Rosa Figueiredo, Lars Magnus Hvattum, Michael Poss, Cristina Requejo: The Robust Vehicle Routing Problem with Time Windows. Computers & OR, 40(3):856–866, 2013.
-2- Duc-Cuong Dang, Rym Nesrine Guibadj, Aziz Moukrim: An effective PSO-inspired algorithm for the team orienteering problem. European Journal of Operational Research 229(2): 332-344 (2013).
-3- Michael Poss: Robust combinatorial opti-mization with variable budgeted uncertainty. 4OR, 11(1):75-92, 2013.
-4- Michael Poss, Christian Raack: Affine Re-course for the Robust Network Design Pro-blem: Between Static and Dynamic Routing. Networks, 61(2):180-198, 2013.
32

Sci
entifi
c R
epo
rt
33Labex MS2T Activity Report 2013-2014
PhD theses and Post-doctorates (appended sheets)Name Position Start date End date Subject
QIUSiqi
PhDNov2011
Nov2014
Reliable design methodology of Systems of Systemsin the presence of uncertainty: application to transport systems
HOANGTuan
PhDDec2011
Dec2014
Biomechanical data uncertainty: modelling and propagation in musculoskeletal system pathology diagnosis models
SAIFOsamah
PhDSept2012
Sept2015
Reactive navigation of a fleet of drones in interaction
RAULTTifenn
PhDOct
2012 Sept2015
Energy saving in wireless sensor and actuator networks
SEVENIEBenjamin
PhDOct
2012 Sept2015
Modeling of the flow of capsules througha complex capillary network
SAHLIAbderrahim
PhDOct
2013 Oct
2016The project scheduling problems with storage resources,
optimisation and robustness AL HARRACH
MariamPhD
Oct2013
Oct2016
Modelling of the Surface EMG/Force relationshipby data analysis of a high-resolution sensor network
TOUATILyes
PhDOct
2013 Oct
2016Internet of Things security: towards a robust interaction
of Systems of Systems
PUTHIYA PARAMBATH
ShameemPhD
Oct2013
Oct2016
New methods for multi-objective learning (co-funded by Labex MS2T/ Regional Council of Picardy)
CALLEBERT Lucile
PhDOct
2013 Oct
2016Modeling autonomous virtual characters for team cognition trai-ning in complex environments (co-funded by Labex MS2T/DGA)
HOUHi Hi
Post-docApr
2012June2012
Wavelength coding of digital informationtransmitted between systems in free space
LAFORETJérémy
Post-docMar2013
Feb2014
Sensitivity analysis and uncertainty modelling:application to electrom yographical models
AL HAJJARHani
Post-docApr
2013 Apr
2014Wavelength coding of digital information
transmitted between systems in free space
RADAKJovan
Post-docApr
2013 Apr
2014Distributed Algorithms and theory of belief functions
BORDESJean-Baptiste
Post-docJuly2013
July2014
Grammar-based driving scene understanding with uncertainties post-doc in the framework of a joint project with LAMA - China
FIGUEIREDORosamaria
Post-docOct
2013 Dec2014
Robust control-command strategies in a contract-basedcollaboration framework (cofunded by Labex MS2T / ALSTOM)
ARDUINPierre
EmmanuelPost-doc
Jan2014
Jan2015
Study of semantic models to manage lifecycle(PLM) applications - MEMORAe project
VIDALGuillaume
Post-docMar2014
Jun2014
Robustness and sensitivity of the Nrf2 responseto toxic exposures in stochastic conditions
Projections October 2014Post-doc: •SystemusingNon-ContactTechniquecoupledwithaBiomechanicalModel-MCHoBaTho(H.X.Vinh)•ElicitationandLearningofPredictiveBeliefFunctions-T.Denoeux(O.Kanjanatarakul) •ModellingMultivariatePreferencesunderSevereUncertainty-S.Destercke(I.Montes)•AggregationofPartialPreferences-B.Quost(O.Cailloux)PhD: •RobustMulti-RobotVisualSLAM-V.FrémontandE.Natalizio(N.AlNakhala)•ASystems-of-SystemsApproachforModelingandIntegratingHumanFactorsinRiskAnalysis-M.Sallakand W. Schon (S. Rungra) •Semantic-BasedFederationofSoSModels-D.Lenne(FundedAIRBUS-CASSIDIAN)(F.Kamdem-Simo)•Characterizationof theNanomechanicalPropertiesofBiological LipidMembranes -K.ElKirat andPE.Mazeran (R. Baiti Nurin)

34 Labex MS2T Activity Report 2013-2014
Arturo Zavala-RioProfessor at IPICYT Institute in San Luis Potosi, Mexico, Arturo Zavala-Rio has spent oneyear of his sabbatical at UTC, ported by UTC, CNRS and Labex MS2T, from Decem-ber 2013 to February 2014. He has collabora-ted with Isabelle Fantoni on output-feedback control of a simple planar vertical take-off and landing (PVTOL) aircraft and on the control of a fleet of UAVs.Experiments of the output-feedback control strategy have been successfully validated on a Robotex quadrotor prototype at Heudiasyc laboratory. The algorithms and results have been recently accepted for publication in In-ternational Journal of Systems Science under the title “Finite-time-observer-based output-feedback control for the global stabilization of the PVTOL aircraft with bounded inputs”. Another part of the work was to study with Osamah Saif, PhD student at Labex MS2T, the consensus problem and flocking in multi-agents systems that can be applied to a fleet of UAVs. The study has already given rise to a paper that has been presented in confe-rence ICUAS 2014 at Orlando in May 2014 on “Flocking of Multiple Unmanned Aerial Vehicles by LQR Control”. Future works and experiments are in progress.
Scott FersonScott Ferson came for three months to visit Labex MS2T and Heudiasyc Laboratory, from January to April 2014. He is an expert in uncertainty modelling and risk analysis, specialized in environmental, health-related and biological applications. His visit was the occasion to know more about his work and to initiate some collaboration. Beyond his inte-ractions with T. Denoeux and S. Destercke, Scott strongly interacted with LABEX mem-bers involved in reliability (M. Sallak), biology (M.-C. Ho Ba Tho and T.T. Dao) and climate (N. Ben Abdallah). Results of these interac-tions include multiple working papers (with S. Destercke and M. Sallak) to be submitted, as well as N. Ben Abdallah’s invitation to a workshop on model validation.
Ahmet SekerciogluProfessor Sekercioglu (Monash University, Australia) has been an invited scholar of Labex MS2T from April 1st, 2014 to June 30th, 2014. Professor Sekercioglu’s interdis-ciplinary research activities have been use-
ful to create some collaborations with three different research teams of the Heudiasyc Lab, and specifically with Enrico Natalizio (équipe RO), Isabelle Fantoni (équipe ASER) and Vincent Fremont (équipe DI). The colla-boration led to the preparation of a Special Issue for the MDPI Sensors on “Visual Sensor Networks” and two research works, namely a paper on “Depth map compression for multi-robot systems” that will be submitted to the IEEE Transactions on Circuits and Systems for Video Technology, and a paper on “Col-laborative Communications for Mobile Visual Sensor Networks” that has been submitted to the IEEE Sensor journal.
Ian F. AkyildizProfessor Akyildiz (Georgia Tech, USA) was an invited scholar of Labex MS2T from June 1st, 2014 to July 31st, 2014. Professor Akyildiz is one of the most famous researchers in the world in the domain of telecommunications and networking (h-index of 80 according to Google Scholar). During his stay at the UTC, he gave two seminars on “Research Chal-lenges in Next Generation Cellular Systems: LTE-A and Beyond” and on “Nano-commu-nications and Internet of nano-things”. The RO team started a longer-term collaboration with Professor Akyildiz, which will consists in exchanging doctoral students for short pe-riods (up to 6 months). Two joint papers are in preparation on “3D Localization for Flying Robots» and on “Quality of Service in Aerial Communications”. Furthermore, Professor Akyildiz helped prepare a Special Issue on “Vehicular Networking” which has been sub-mitted by a member of the RO team to one of the journals of which Professor Akyildiz is Editor in Chief.
Jérôme NoaillyDr Jérôme Noally is a Senior Research Asso-ciate at the Institute for Bioengineering of Ca-talonia (IBEC), Barcelona (Spain) specialized in computational models of biomechanics systems, more specifically in the develop-ment of multiphysics models of the interver-tebral disc cartilage. He was invited from April to August in order to develop a project invol-ving methods and approaches to systems of technological systems at LABEX, and also to contribute to the existing expertise in our group, C3M (Multiscale Characterization and Mechanical Modelling) of BMBI. A collabo-rative project is being worked on to apply the H2020 Calls in Health specifically PHC program (Personalising Health and Care).
34
Visiting Chairs

Sci
entifi
c R
epo
rt
35Labex MS2T Activity Report 2013-2014
Roberto SacileDuring Roberto Sacile’s scholar visits (in June 2013 and from May to September 2014), we have jointly worked on specific aspects at Heudiasyc laboratory, resulting in: •SubmissionofacommonEuropeanpro-ject titled: “CYBERPHYSICAL SAFETY FOR TRANSPORT SYSTEMS”, corresponding to Call H2020-ICT-2014-1. • Co-tutoring of a PhD student (StefanoTerribile) on the railway safety sponsored by University of Genova on funds given by An-saldo STS, an Italian industry leader in railway signalling technologies. •Paper submitted in 2014 (under secondrevision) to the Journal “Control Engineering Practice”: Chiara Bersani, Siqi Qiu, Roberto Sacile, Mohamed Sallak, Walter Schön, “Ro-bust, distributed and expeditious evaluation of a train scheduling on a single line track”. • Paper submitted in March 2014 (un-der second revision) to the Journal “Safety Science”: Siqi Qiu, Roberto Sacile, Mohamed Sallak, Walter Schön, “On the application of Valuation-Based Systems in the assessment of the probability bounds of Hazardous Mate-rial transportation accidents occurrence”. •Paper submitted to the 10eConférenceFrancophone de Modélisation, Optimisation et Simulation, MOSIM 2014 :Z. Kais, M. Sallak, W. Schon, R. Sacile, “A UML approach for modeling and verifying of Railway signalling Systems specifications”. • An ERASMUS agreement between theUTC and the University of Genova. •AresearchagreementbetweentheUTCand the University of Genova.
Fawaz Habbal and Vahid TarokhDuring their visit to Labex MS2T, Professor Vahid TAROKH, area dean of Electrical and computer engineering (Harvard university), and Dr. Fawaz Habbal, executive dean of the School of Engineering and Applied Science (Harvard university), have presented two lec-tures on “spectrum sharing” and “interdisci-plinary research: challenges and perspective”. Professor Tarokh an Habbal had a research meetings with Pr B. Bachimont, research director at UTC and Y. Grandvalet, Deputy Director of Heudiasyc lab.Based on the meetings they had with Profes-sor Bouabdallah and his Ph.D. students, they identified joint research collaborations for the future. They invited Tifenn RAULT, a Labex Ph.D. student, to visit Harvard University to continue this initiated joint research on energy saving in low-power networks. Moreover Pro-fessor Tarokh and Prof Bouabdallah started to
work on a new joint research proposal. They are planning to write a proposal to Alcatel-Bell Labs innovation funds that they will submit in the near future.
Carlos CalafateDuring his one month stay in Compiègne, Carlos Tavares Calafate worked with Ber-trand Ducourthial. They studied the possibi-lity of measuring the pollution in a city using a mobile sensor instead of a fixed one. They focused on the ozone measure in the city of Compiègne (currently equipped with a single fix ozone sensor) relying on a bus equipped with an ozone sensor.Obtaining detailed pollution maps for urban environments is an effort that is gathering much interest by allowing to better regulate traffic and protect citizens from hazardous conditions. However, the scarcity of pollution sensors prevents obtaining the desired de-gree of detail, requiring alternative solutions to be deployed. This statistical study relies on a reference ozone map created from similar example from other cities and a kriging pro-cess to reconstruct this map from sampling measurements. Overall, accurate predictions have been found, with error values typically ranging from 2% to 10%. Compared to solu-tions based on deploying static sensors on the different bus stops available, it has been shown that the proposed mobile sensing approach is able to provide a degree of ac-curacy comparable to deploying tens of sta-tic sensors, substantially reducing costs and management. Thanks to this study, the next step will consist in deploying a real testbed in the city.

36 Labex MS2T Activity Report 2013-201436
In addition to the prospects mentioned in the reviews of each research topic, new projects are also in start-up phase. Some projects are jointly funded by industry and institutional partners or receiving project support, some are the result of opening up to the humanities and social sciences, and others are interna-tional.
> Projects jointly funded with other partners
Rosamaria FigueiredoRobust control-command strategies in a contract-based collaboration framework.Post-doc co-funded by Labex MS2T/ ALSTOM (2013-2014)(Supervisor: Antoine Jouglet)Within the framework of a collaboration with ALSTOM, we are working on a project with two systems (a partner and a client), both producers and consumers of the same kind of energy resource, who must collaborate to balance their consumption/production over a given time horizon. This collaboration is brought about by the use of several contracts of consumption or production offered by the partner over the different time periods. Each contract offered has its own functional constraints and its own gain/cost functions. The partner determines the set of contracts and sets a price to en-gage each one. At any time period, the client can consume the energy resource out of any engaged contract but at a very high cost which can vary with the time period. The client system is composed of subsys-tems that produce/consume the energy resource. The consumption/production can be driven for a subset of these systems (drivable systems) while the consumption/pro-duction is already planned for the other ones (non-drivable systems). Some of the drivable systems can store the energy resource under a capacity constraint (storage systems) and provide it when it is needed. For a part of the non-drivable systems, only uncertain pre-visions of the consumption/production are known (uncertain non-drivable systems).
From a real-time point of view, the instan-taneous production/consumption of each system is measured at each time step. It is also at this time scale that drivable systems are driven. A real-time command strategy is a function defined for a given time period which associates a set of decisions to all time steps. The optimization problem consists in determining an optimal (according to the cost) contract subscription from the client to the partner in such a way that there exists a robust real time command strategy which satisfies any consumer demands of the client subsystems over the time horizon and in such a way that each commitment taken by the client with the partner is honoured.We have denoted this problem as the Ro-bust Contract-based Collaboration (RCbC) problem and its deterministic version as the Deterministic Contract-based Collaboration (DCbC) problem. In the literature, RCbC is related to the retailer-supplier problem with flexible commitments and the design of hy-brid energy systems. We have found many deterministic solution approaches for these problems and a few robust optimization ap-proaches. We formulated the DCbC problem as a mixed integer linear problem. A time decomposition strategy was applied. In the first level, the integer formulation models the set of decisions that must be taken at the be-ginning of each time period considering the state of each system at that moment. In the second level, a real-time command strategy is defined (by an efficient polynomial algorithm which can be run in real time) assuming that an optimal solution for the first stage is pro-vided. In addition, we developed a dynamic programming algorithm for a special case of DCbC. For the RCbC problem, we have pro-posed a robust formulation (for the first level of the time decomposition approach) in which adjustable variables are replaced by affined decision rules. Currently, we are implementing these formulations and algorithms. The next stage of this research consists in comparing the results obtained with them.
New Projects

Sci
entifi
c R
epo
rt
37Labex MS2T Activity Report 2013-2014
Shameem Puthiya ParambathNew methods for multi-objective learningPost-doc co-funded by Labex MS2T/Picardy Region(Supervisor: Nicolas Usunier)
Nowadays, machine learning algorithms are deployed on very large-scale applications, such as Web search engines or recommender systems.However, independently of the application domain, existing algorithms can only optimize simple performance indicators, which cannot capture all aspects of the end-user needs.While a natural solution would be to optimize a single, more complex performance indica-tor, it turns out that this is usually impossible for computational reasons: it typically requires to solve NP-hard problems. The goal of the PhD studentship is to design new multi-ob-jective approaches to machine learning, in order to develop methods that can optimize non-trivial trade-offs between different perfor-mance indicators.The idea is to cover different aspects of the task with several “simple” performance indi-cators, rather than a single indicator with a complex structure.
Solving multi-objective problems, and in par-ticular machine learning problems, has been identified by the Labex MS2T as a key chal-lenge in technological systems of systems. The PhD student is thus expected to perform empirical validations of the new algorithms on systems of systems applications.
The PhD started in December 2013, and new results have been obtained for the optimiza-tion of a class of non-linear performance mea-sures for classification algorithms, for which no computationally efficient methods exist. Based on the relationship between these non-linear performance measures and the multi-objective problem of jointly minimizing false positive and false negative rates, we obtained the first non-asymptotic theoretical analysis of the optimal classifiers for these perfor-mance measures, and a new algorithm was empirically validated on benchmark datasets. These results will be presented at NIPS, the flagship conference in machine learning. In the remainder of the project, we will focus on broader systems with the goal of developing theoretical and algorithmic tools that can be applied to systems of systems.
Lucile CallebertModelling autonomous virtual characters for team cognition training in complex environ-ments.PhD thesis co-funded by Labex MS2T/DGA (General Directorate for Armament) (October 2013 - October 2016)(Supervisor: Domitile Lourdeaux)
As work situations grow more complex, Vir-tual Environments generate more and more interest, since they enable successful training, especially when aspects of cost, accessibility or dangerousness prevent learners from being put in genuine work situations. This is even more true when operators have to manage dynamic systems of systems (e.g. environ-mental management or CBRN crisis, terrorist threats or military conflicts, risk management in multimodal transport on high-risk sites). Vir-tual Reality allows users to see the impact of their decisions on organisational and human technical systems in which they take part and for which they are individually and collectively responsible. One of the future challenges is to use virtual reality to train students not only in technical skills, but also in non-technical skills if the issues of social interaction and collec-tive responsibility are central to the manage-ment of such systems, where hazards require teams to reorganise and make quick and good decisions. The aim of this thesis is to model cognitive and autonomous virtual cha-racters to create relevant learning situations through training in collective intelligence and team cohesion in complex socio-technical environments.

38 Labex MS2T Activity Report 2013-201438
Imatisse (Inundation Monitoring and Alarm Technology in a System of Systems)
Funding: The Picardy Region
Project coordinator: Enrico Natalizio, Heu-diasyc
Period: September 2014 - August 2017
Summary: The territory of Picardie is confronted with a wide diversity of natural ha-zards: flooding, runoff and mudslides, lands-lides, and marine and terrestrial storms. In the history of natural disasters in the region, the events of 2001 strongly impacted the inhabi-tants. Somme, the iconic river, overflowed for months, causing the evacuation of thousands of residents from the valley. Social, economic and environmental costs were considerable. A national commission of inquiry concluded that there was a strong need of strengthening the tools for crisis management and preven-tion of natural hazards, in addition to the major repairs to be carried out. Therefore, in October 2002, the Ministry of Ecology and Sustainable Development launched a national call for projects to establish Programmes d’Actions de Prévention des Inondations (PAPI). These projects try to reduce the risk by promoting restoration and maintenance of rivers, expan-sion of the floodable areas around the rivers, and hydraulic adjustments.
The aforementioned works are necessary, but often not sufficient to weather the violence of unexpected natural phenomena that still produce severe damages to the social and economic activities of the stricken territories and endanger human health and life. Two as-pects have not gotten enough consideration in the implemented solutions: the forecast and alarm management, and the real-time crisis management.
IMATISSE proposes a System of Systems (SoS) approach. Systems of Systems consist of collections of constituent systems (pos-sibly independent, pre-existing, geographi-cally distributed and following their own goals) whose behaviours are coordinated to provide services and additional value with respect to their original intended operations.
IMATISSE’s approach is based on two main components: a robot and sensor network and a mobile crowdsensing system.
Recif (Belief networks for the quantitative assessment of Railway Infrastructure Operating Safety parameters)
Funding: ANR JCJC 2013 project (Young Researchers).
Project coordinator: Mohamed Sallak, Heudiasyc
Partners: CRAN (Centre de Recherches en Automatique de Nancy) and LAMIH Valen-ciennes
Period: February 2014 (3 years and 6 months)
Since the project started on 1 February 2014, emphasis has been put on coordinating the activities in order to enhance team work among the partners and on launching the field work to collect the data needed for our dependability studies.
•An internet webpage was created (https://recif.hds.utc.fr) as well as an intranet collabo-rative webpage whose access is restricted to project members in order to exchange files and information, and to work on common documents.
ANR Imatisse Enrico Natalizio Research topic 1
ANR Récif Mohamed Sallak Research topic 1
ANR Victeams ANR Domitile Lourdeaux Research topic 1
MacCoy Critical Domitile Lourdeaux Research topic 1
ANR Readmi Frédéric Lamarque Research topic 1
UML Net Sébastien Destercke Research topic 2
> Projects supported by Labex funded by another source

Sci
entifi
c R
epo
rt
39Labex MS2T Activity Report 2013-2014 39
• A meeting has been organized at Com-piègne in June bringing together most of the partners (physically or through skype confe-rences); more informal discussions between 2 or 3 partners also occurred punctually.
• Since April 2014, 2 intern students have been supported by RECIF project.
One student works on the methods allowing the use of UML for modelling and verification of safety properties of railway systems. The other student works on simulation methods for reliability studies of railway systems.
•Since September 2014, a Post-doc student has also been supported by RECIF project in order to work on the problem of elicitation of reliability data of components from experts.
Victeams (Virtual Characters for team Training: Emotional, Adaptive, Motivated and Social)
Funding: ANR
Project coordinator: Domitile Lourdeaux, Heudiasyc
Partners: Heudiasyc, LIMSI Université Paris 11, CEA-LIST, IRBA, Ecole du Val de Grâce, Brigade des Sapeurs Pompiers de Paris, RE-VIATECH
Period: December 2014 - June 2018
Summary: Several application areas need rescuer teams to be trained to manage crises in complex socio-technical environments (e.g. terrorist attacks, natural disasters). The members of these emergency teams need to adapt, under emotional stress, to potential disruptions due to the uncertainties of crisis management situations such as the danger of the situation itself, a state of intense stress or a potential failure of a team member. Our interdisciplinary group of partners brings in skills in experimental psychology, artificial intelligence, pedagogy and software engi-neering to design a virtual environment that overcomes the limitations of existing training systems. The VICTEAMS project aims at desi-gning computational models for virtual envi-ronments featuring virtual characters that are endowed with emotion, social and cognitive capabilities for training rescuer teams. We propose the combined consideration of psy-chological processes that underlie emotions, social relations and social norms within virtual characters. These processes will be integra-
ted into social virtual characters and a virtual environment that is dynamic and realistic for training non-technical collective skills. Seve-ral user groups and several domain will bene-fit from the VICTEAMS training environment (e.g. firefighters, military and civil protection, emergency medical service, first rescuers, humanitarian NGOs).
MacCoy Critical (Models for Adaptative feedback enriChment and Orchestration based virtual realitY in Critical situations)
Funding: ANR
Project coordinator: Jean Marie Burkhardt, IFSTTAR-LPC
Partners: IFSTTAR (LPC and LEPSIS), LIG Université Joseph Fourier, Heudiasyc, LATI Université Paris Descartes, Ilumens, Medu-sims
Period: December 2014 - June 2018
Summary: Project McCoy Critical focuses on building skills to manage critical situations in two safety-critical areas, medicine and automotive driving. Critical situations refer to complex dynamic risk situations where both internal ( skills, fatigue, etc/) and external fac-tors to the individual (the environment, other involved actors, etc.) deviate from the situa-tions controlled by the subject on the basis of rules and procedures acquired during the initial stages of learning. The management of these situations requires not only technical but also procedural skills. They also mobilize a set of soft skills (e.g. communication, lea-dership, situational awareness, etc.). These skills will be studied and modelled during the course of the project in order to support the development of adaptive simulated situa-tions that are effective for elaborating non-technical skills. Project McCoy Critical aims to develop and evaluate a training platform for critical situations, supported by a simula-tor involving the management of a dynamic environment. Software agents will (1) receive and process information underpinning antici-pation and decision making for the learner; (2) dynamically adapt the complexity and critica-lity of the situation and (3) enable feedback to trainees. The project aims to (a) provide better knowledge of the soft skills related to mana-ging critical situations and (b) develop the tools to design simulation environments and virtual reality environments that are conducive to learning. To promote more generic tools,

40 Labex MS2T Activity Report 2013-201440
the project is working on two areas of lear-ning (medicine, driving). In order to achieve these goals, project McCoy Critical relies on a multidisciplinary consortium and multiple fields of expertise (Ergonomics , Psychology, Computer Science, Virtual Reality , medical training , training for driving, etc.), and seve-ral proven experiences of successful colla-boration between different partners. A SME specialized in medical simulations is associa-ted to the project, in order to promote value creation from the project’s results.
Readmi (Remote Energy supply and controlof smArt Digital MIcro-conveyor)
(ANR 13 – BS03 – 0003 – 01) – Current status (Dec. 2013 - Sept. 2014)Funding: ANR
Project coordinator: Frédéric Lamarque, Roberval
Partners: Roberval Laboratory UMR UTC/ CNRS 7337 Institute of Fundamental Elec-tronics (IEF), UMR 8622 - University of Paris 11 Laboratory of Condensed Matter Physics (LPMC), EA 2081, University of Picardy - Jules Verne (UPJV) Mechatronic Systems and Ma-terials Laboratory (SYMME) - EA 4144 - Uni-versity of Savoie
-1- Context
The READMI project aims at providing a wireless method that brings power and allows control of micro-conveyors integrating bistable/multistable micro-actuators based on flexible structures or electromagnetic mi-cro-actuators. This project, started in Decem-ber 2013, is in the launch phase. During the first semester of 2014, efforts were made in:
•Hiring human resources in each team and buying equipment (management task)
•Designing flexible meso-structures that can be integrated into a micro-actuator able to en-sure the function of micro-conveyance after scale reduction
•Designing the selective wavelength control method applied to an array of electroma-gnetic digital meso-actuators. This work will be transferred then adapted to multistable micro-actuators based on flexible structures in the second part of the project (2016-2017)
-2- Design of bistable/mutistable meso-actuators based on flexible structures
• Bistable micro-actuator with stroke reducing structureA monolithic bistable micro-actuator with stroke reducing structure was reported on the Proceedings of the ASME 2014 12th Biennial Conference on Engineering Systems Design and Analysis (ESDA2014) held from June 25-27, 2014, in Copenhagen, Denmark. Two kinds of stroke reducing structure were mo-nolithically integrated into the actuator. The mathematical model was constructed for both the bistable actuator and the stroke reducing structure. The designed actuator was fabrica-ted on medium density fibre board (MDF) by laser cutting machine (Trotec speedy 400 with CO2 laser). The original stroke of the bistable actuator is 2.38mm with the help of fibre-optic distance sensor (homemade). With the stroke reducing structure, the stroke is reduced to 1µm. The bistability of the designed micro-actuator was experimentally validated.
•Multistablenano-actuatorBased on the previous mentioned work, a multistable nano-actuator was designed. This work is accepted by the 10th France – Japan Congress, 8th Europe – Asia Congress on Mecatronics (Mecatronics2014) which will be held in Tokyo, Japan, on November 27-29, 2014. The multistable nano-actuator is formed by parallel coupling of four bistable modules Each of the bistable module has an integrated stroke reducing structure (a similar design to the one reported in previous work for ESDA2014). The new nano-actuator is expected to be fabricated on silicon wafer using etching techniques. The bistable pre-shaped beam has a thickness of 20µm, which is thinner than the MDF based beam. As a consequence, the original output stroke of the bistable beam can be smaller (280µm). With the help of stroke reducing structure, the out-put strokes of bistable modules are reduced to nano-scale. By selectively designing the reducing stroke structure with a proper redu-cing factor for each bistable module, different combined output strategies can be realized. If the output of four modules is designed to be binary increased, such as, 10nm, 20nm, 40nm and 80nm, the combined output will be uni-formly distributed in a continuous zone, from 0 to 150nm with a constant step of 10nm. The mathematical model was constructed for the designed nano-actuator and it showed good agreement with the FEM (finite element method) model.

Sci
entifi
c R
epo
rt
41Labex MS2T Activity Report 2013-2014 41
-3- Wavelength selective control of an array of electromagnetic digital actuator
For this part of the project, we are currently at the stage of designing the electronic units at the emitting or receiving systems to ensure the selective control of the array of electro-magnetic digital meso-actuators. A master student was hired in the spring semester to start the design and fabrication of electronic prototypes that will be tested this fall semes-ter with the aim to demonstrate the selective control of the array of meso-actuators (equip-ment already available) or the array of micro-actuators (under development - tests to be performed this coming winter).
Additionally, a Ph-D student is under recruit-ment. During the next three years, he/she will develop the required control architecture for both multistable micro-actuators based on flexible structures and the array of electro-magnetic digital micro-actuators. He/She will take into account the power supply manage-ment, in a remote way, in the second part of the Ph-D thesis.
Publications related to these activities:
X. Liu, F. Lamarque, E. Doré, L. Petit, P. Pouille, Y. Duhamel “A Bistable Micro-actuator with stroke reducing structure”, ASME 2014 12th Biennial Conference on Engineering Systems Design and Analysis (ESDA2014), June 25-27, 2014, Copenhagen, Denmark
X. Liu, F. Lamarque, E. Doré, “Design and Simulation of a Multistable Nano-actuator”, 10th France - Japan Congress, 8th Europe - Asia Congress on Mechatronics (Mecatro-nics2014), November 27-30, 2014, Tokyo, Japan - Accepted
UML Net (Uncertainty in Machine Learning Network)
Funding: ANR
Project coordinator: Sébastien Destercke, Heudiasyc
Partners: Heudiasyc, BGE (Biologie à Grandes échelles), Universidad de Oviedo, Paderborn University, IDSIA (Lugano, Swit-zerland), Belfast university
Period: December 2014 - November 2016
Summary: This project is a first step towards the construction of a European network focu-sing on the problem of learning under uncer-
tainty, in particular with recent uncertainty theories. It includes most prominent teams working on this topic around Europe. The project will fund workshops and stays abroad for all teams involved, and will focus mainly on two problems: modelling uncertain data and learning from them will be the first tack-led problem, and including cautiousness in models and in decision-making processes will be the second. Both aspects will be conside-red under different approaches in which the involved partners are experts, and for different issues such as tractability, optimality, applicative needs, etc.

42 Labex MS2T Activity Report 2013-2014
7 FEDER: European Regional Development Fund
42
> Opening up to the Humanities and Social SciencesSoS Labex benefits from the presence of re-searchers affiliated with these disciplines wit-hin UTC and therefore intends to include this dimension to enhance scientific and techno-logical discussions. The first exchanges led to the concept of autonomy identified as being able to produce fruitful discussions and to define new research opportunities which clear-ly form part of the systemic tradition, more specifically the cybernetics tradition of SoS.
Clearly, the cybernetic era of the 30s / 40s had significant scientific consequences. One of these consequences was the rise of a science of systems which helped to characterise at least three major categories of organisation: retroactive effect, self-organisation and auto-nomy. Although the first two categories led to advanced formalisations (only partially for self-organisation), autonomy remains little understood and is not formalised. Another consequence was a rich dialogue between the social and human sciences and between the formal and technological sciences, as cy-bernetics contributed to the foundation of the so-called cognitive sciences.
For many authors, autonomy must be sought in particular organisations implemented by living and cognitive systems. The objec-tive would therefore be to suggest that the reflexive and scientific work conducted to shed light on the autonomous behaviour specific to living and conscious systems is a prerequisite for several fields of scientific and technological research, and the SoS labex is a highly relevant and original place to conduct such work. Such an approach makes it pos-sible to engage a dialogue inclusive of the HSS to the extent that the concept of a sys-tem is shared by various scientific fields, the issue of autonomy and cybernetics providing a framework of coherence and inquiry.
As such, the SoS Labex is opening a working area which will draw on the scientific skills and disciplines present within the UTC units in order to address this matter by looking at several issues:
•understanding theautonomyof livingsys-tems: this objective is derived from the life sciences in general, as well as from the mo-delling to describe and define this observed autonomy (which should be distinguished
from the autonomy used to describe – pro-bably unduly – certain robotic technologies);
• identifying the principles for autonomoussystem design: this objective is derived from the engineering sciences;
• redeveloping, based on this research, theconcept of autonomy in its epistemologi-cal, ethical, philosophical and legal tradition; this objective applies to various areas of the humanities and social sciences;
• considering the human being within hissocio-technical environment as an autono-mous system: the individual with his tools and networks as an autonomous entity, rather than the isolated individual considered as a single being; this objective is derived from in-formation, communication, philosophical and anthropological sciences;
• defining these experimental modalities toobserve, simulate and test autonomous sys-tems or systems designed to be autonomous.

Sci
entifi
c R
epo
rt
43Labex MS2T Activity Report 2013-2014
> International projectsKey Laboratory of Machine Perception, Peking University (PKU), China
Franck Davoine
This Sino-French collaboration involves the Heudiasyc laboratory – Labex MS2T and the Key Laboratory of Machine Perception of Peking University (PKU) and started in 2011. At that time, both laboratories initiated a joint research within the LIAMA consortium and in particular via its MPR project focused on intelligent vehicles and associated methods for dynamic scene perception in urban dri-ving environments. MPR involves researchers from PKU, CNRS and UTC, and will end in November 2014. The research itself is sup-ported by the joint research project PRETIV [2012-2015] of the Programme Blanc Interna-tional co-funded by the French ANR and the Chinese NSFC agencies. Furthermore, the two laboratories have been involved in two other projects, one from the Cai Yuanpei Pro-gramme co-funded by the French Ministry of Foreign Affairs and by the Chinese CSC, and one from the ICT-Asia programme funded by the French Ministry of Foreign Affairs. These two last projects and Labex MS2T have been used to support the mobility of numerous French and Chinese researchers and Mas-ter/PhD students between Compiègne and Beijing. As an example, a PhD student from Heudiasyc stayed during 18 months in PKU, and a PhD student from PKU stayed during 12 months in Heudiasyc.
Between 2011 and 2014, the Key Laboratory of Machine Perception has received several French colleagues for short or long stays: one CNRS researcher (Franck Davoine), in PKU from 2011 to 2014; one postdoc researcher Labex MS2T (Jean-Baptiste Bordes) for 24 months; one PhD student (Philippe Xu) for 18 months; and three Master students for 6 months each.
All these research actions are accomplished in touch with the technical centres of PSA Peugeot Citroën located both in France (Véli-zy) and in China (Shanghai). PSA serves as an Advisory Board and acts as an expert in the
fields of Intelligent Vehicles and driving assis-tance systems. It gives the project members meaningful advice on a regular basis in dif-ferent areas, including test-bed technologies and relevance of the research objectives for future advanced driving assistance systems in France and in China.
So far, as it was initially planned, the two aca-demic partners have addressed challenging research issues on perception and reasoning for intelligent vehicles, interconnecting sen-sing with inference methods. Several solu-tions have been proposed, and made visible on an international level through publications. On-road data acquisitions and experiments have been conducted in each site, some of which involved student exchanges between Beijing and Compiègne. Several research meetings were organized in France and in China. Intermediate project achievements have been evaluated on 29 November 2013, on the basis of a progress report, a one-hour oral presentation, and discussions with ANR’s scientific expert committee. This has given rise to more than 12 international co-publica-tions shared by the two French and Chinese academic partners.
International Joint Research Unit at
CINVESTAV Mexico UMI - LAFMIA 3175 CNRS - CINVESTAV
Director: Rogelio Lozano
Franco-Mexican Computing and Automation Mixed International Laboratory Unit (LAFMIA) is the only joint research unit (UMI: Unité Mixte de Recherche) that CNRS has in Mexico. It was created in March 2008. This UMI is the result of joining two previous Associated International Laboratories (LIA) on Compu-ter Science (LAFMI) and Automatic Control (LAFMAA). The partners forming the UMI are: CINVESTAV, CONACYT, CNRS, Université de Technologie de Compiègne (UTC) (Heudia-syc and Labex MS2T), Grenoble Polytechnic Institut (Grenoble INP) and University Joseph Fourier (UJF).

44 Labex MS2T Activity Report 2013-2014
The organization of the UMI reflects the his-tory of the bilateral collaboration. The UMI is hosted by CINVESTAV (Research and Advances Studies Centre of the National Polytechnic Institute) in Mexico City which is one of the leader research institutions in Mexico. The UMI includes 2 CNRS resear-chers and 14 professors from CINVESTAV.
The other part of the UMI in UDLAP (Universi-dad de las Americas de Puebla) has 1 CNRS researcher and 6 professors. The UMI has 5 postdocs and 46 PhD students.
The scientific activities of the laboratory focus on two domains: Automatic Control and Computer Science. The Automatic Control domain deals with mini-aerial and submarine autonomous vehicles and exo-squeletons. Research in Computer Science centres on Ambient Systems and Multi-scale manage-ment of resources and Multi-objective Evolu-tive Optimization. The research subjects are in accordance with the objectives of Labex MS2T. Master and PhD students as well as professors visit the UMI
LAFMIA and Heudiasyc Lab and Labex MS2T on a regular basis to work on subjects of mu-tual interest. The collaboration is intense and very fruitful.
www.hds.utc.fr/lafmia
Lakeside lab – Klagenfurt, Austria
Enrico Natalizio
In the month of February 2014 Enrico Nata-lizio visited the Lakeside Labs of Klagenfurt, Austria.
A project collaboration between Enrico Nata-lizio and Evsen Yanmaz, senior researcher at the Lakeside Labs, already existed. In fact, they had already submitted a joint project pro-posal to the bilateral Franco-Austrian ANR-FWF call for projects, whose scientific topic concerns the definition of a new communica-tion paradigm for multi-robot systems.
In this context, Enrico Natalizio visited the Lakeside Labs to continue this collaboration with some more practical objectives. Speci-fically, Evsen Yanmaz and him worked on the extension of a previous work published by E. Natalizio on the Sport Event Filming pro-blem. During the visit, they included several communications elements in the mathemati-cal formulation and the simulative platform of the existing work that had been neglected in the first version in order to enrich it and make it more realistic. This work is currently under review.
The collaboration with the Lakeside Labs will continue in the next months/years, in par-ticular with both Enrico Natalizio and Evsen Yanmaz as proposers of the MUVS workshop which will become a new symposium invol-ving three research communities: Control, Vision and Communications.
Department of Mathematical Science, Durham University, UK
Sébastien Destercke
Duration: 2 months (May/June 2014)
This stay had two main goals, the first of which was to pursue ongoing scientific col-laborations with Matthias Troffaes and Frank Coolen, who are highly recognized resear-chers in the field of imprecise probabilities. The second goal was to see if establishing long-term collaboration with the two labora-tories was possible.
Indeed, some applications (e.g., agronomi-cal crop systems and power grids) in which the department of mathematical science is involved are strongly linked to systems of systems. Overall, the first goal was reached, resulting in submitted papers, and further efforts will be needed to identify possible co-operations on a laboratory-scale. One step towards this identification is the possible invi-tation of Matthias Troffaes or Frank Coolen through LABEX funds.

Sci
entifi
c R
epo
rt
45Labex MS2T Activity Report 2013-2014
Chiang Mai University, Thailand
Thierry Denoeux
In 2013 we started a collaboration with the Faculty of Economics at Chiang Mai Univer-sity, Thailand, where Thierry Denoeux has been invited several times. The purpose of this collaboration is to develop and study new methods of statistical inference for estima-tion and prediction based on belief functions. Although belief functions have been applied to statistics since the 1960’s, their application to complex statistical models has remained limited because of algorithmic complexity. We are developing a tractable approach based on Monte Carlo simulation. The newly deve-loped methods are being applied to econo-metric models of increasing complexity, inclu-ding models with a potentially large number of covariates and temporal correlation. This research work meets some of the scientific objectives of Research topic 2.ted Publications
•O.Kanjanatarakul,S.Sriboonchitta andT.Denoeux. Forecasting using belief functions: an application to marketing econometrics. International Journal of Approximate Rea-soning, Vol. 55, Issue 5, pages 1113–1128, 2014.
•K. Autchariyapanitkul, S.Chanaim, S. Sri-boonchitta and T. Denoeux. Predicting stock returns in the capital asset pricing model using quantile regression and belief functions. In 3rd Int. Conf. On Belief Functions (BELIEF 2014), Oxford, UK, Springer, Sept. 2014.
• O. Kanjanatarakul, N. Kaewsompong, S.Sriboonchitta and Thierry Denoeux. Estima-tion and prediction using belief functions: Application to stochastic frontier analysis. In 8th conf. of the Thailand Econometric Society (TES 2015), Chiang Mai, Thailand, Springer, Jan. 2015. (To appear).
LISIN, Politecnico di Torino, Italy
Sofiane Boudaoud, Frédéric Marin
LISIN (Laboratory of Engineering of Neuro-muscular System and Motor Rehabilitation) is a global leader in analysing and modelling the neuromuscular system interactions with the musculoskeletal system using grids of sen-sors (HD-sEMG).
Frédéric Marin and Sofiane Boudaoud visited in June 2014, invited by LISIN Director Prof. Roberto Merletti. Objectives of this trip:
- Introduction of a scientific collaboration wit-hin the thesis of Mariam Al Harrach (Labex MS2T)
- Discussions with the team of Prof. R. Mer-letti on the possibility of filing a joint European project in late 2014 in response to the call for projects H2020 on a theme related to geron-technologies. This theme is likely to be carried by the Labex MS2T.
Others from both LISiN and UTC underlined the availability for joint measurements on to-pics of common interest, student exchange, use of technology and so on. The study of forearm muscles and work related injuries are a strong common field of interest for UTC and LISiN.

46 Labex MS2T Activity Report 2013-2014 46
University of Genova, Italy
Mohamed Sallak
From October 25th to 31st 2013, Mohamed Sallak has visited the University of Genova in Italy. He has worked with the Professor Roberto Sacile on the preparation of a Euro-pean project: CYBERPHYSICAL SAFETY FOR TRANSPORT SYSTEMS “CYPHETY” for the call H2020-ICT-2014. This project was submitted in April 2014. Then, He gave two seminars on the topic of risk studies of railway systems at Foundation CIMA (www.cimafoundation.org) and another at Ansaldo STS. He also met Fabio Lavagetto, the vice president of University of Genova and dele-gate for the research, with the aim of creating a common course and student exchange pro-gram between the master MSCI at UTC and the master of transport at the University of Genova. He also met Riccardo Minciardi, the former director of department who is now on the board of scientific directors of University of Genova, to discuss about the same project. Finally, He gave a seminar at the conference of CP-Expo community Protection about reliability studies of railway systems. Profes-sor Roberto Sacile was an invited scholar of Labex MS2T in June 2013 and from May to September 2014.
1st European Conference on the Future Internet (ECFI)
Madjid Bouabdallah participated in April 2014 (http://www.ecfi.eu/about-brussels2014/) to the 1st European Conference on the Fu-ture Internet (ECFI) which aims at bringing together key stakeholders to discuss how Europe can achieve global leadership in ICT by 2020 through innovative Internet tech-nologies. During this conference, Professor Bouabdallah had intensive discussions with several participants and established some im-portant connections with European research labs. From the set of talks, we confirmed that the discussed research topics, considered very challenging and important for the future, are also included in the research activities ofLabex MS2T.
T-AREA-SoS
Labex MS2T participated in the Trans-Atlantic Research and Education Agenda in System of Systems (T-AREA-SoS), which is a Support Action project funded by the European Com-mission (Grant No. 287593) with the primary purpose of formulating a Strategic Research Agenda (SRA) for Systems of Systems Engi-neering (SoSE).
The SRA supports the identification of key enablers for European competiveness and societal improvement from Systems of Sys-tems contributions to the Horizon 2020 Pro-gramme.
T-AREA-SoS had a particular purpose in seeking to prioritise research areas that were of mutual interest to Europe and the United States of America, such that the SRA should be a catalyst for transatlantic collaborative research.
The main output of this support action, the SRA, has been formulated through a series of activities which brought together informa-tion collected and validated through a set of exchange workshops held in Europe and US. Overall, more than 100 experts have contri-buted to the agenda, including experts from the customer (industrial and government) and researcher (industrial, government, and aca-demic) communities, together with research funding agencies in both Europe and the US.

Sci
entifi
c R
epo
rt
Labex MS2T Activity Report 2013-201446
The goal of the national network ROBOTEX is to build a coherent infrastructure for technical equipment as well as scientific and technolo-gical expertise. The experimental platforms of ROBOTEX belong to 15 joint CNRS-university laboratories with strong research and deve-lopments in robotics and with material and human resources guaranteeing an access and an optimal exploitation of the platforms. This national network links together most of the leading academic robotics research teams of France.
It is structured into five scientific themes:
•ProductionRobotics,•MobileRobotics,•MedicalRobotics,•Micro-Nanorobotics,• Humanoid Robotics and Natural Interac-tions.
The laboratory Heudiasyc UMR UTC/CNRS (located at the Université de Technologie de Compiègne) is the head of the Mobile Robo-tics sub-network.
The equipment at UTC is as follows:
Equipment n°1: squadron of mini Unmanned Aerial Vehicles
Equipment n°2: autonomous road Intelligent Vehicles
Equipment n°3: experimental support: pro-tected outdoor UAVs flight area, “mobile labo-ratory”
(i.e. an equipped van with electric power ca-pacities) to assist experiments outdoors and to carry out experiments away from UTC, me-chanical and electrical workshops.
Heudiasyc is acquiring a fleet of mini UAVs. The chosen configuration is an octorotor, composed of 4 double controrarotating rotors, in order to increase the payload and embed several appropriate sensors (RTK GPS, IMU, cameras, Hokuyo laser) depending on the de-dicated application. We decided to build our own framework to have a maximum of flexibi-lity to integrate every sensors and electronic equipment needed by the Robotex project.
Computer-aided design of the octorotor was first realized by our team. Then, a 3D printer and a CNC milling machine that have been recently bought were used to build two first prototypes.
Several experiments with the two first proto-types have been already realized. Experimen-tal tests of line following with embedded pro-cessing using line detector and optical flow have been demonstrated several times at the Heudiasyc laboratory and during shows as for example during Innorobo in Lyon in March 2014 or during the workshop MUVS 2014 that has been held at the Innovation Center of UTC. Other tests have been performed using the redundancies of motors in the configura-tion of the octorotor to validate researches on fault-tolerant control when a motor fails.
The UAVs will allow cooperative studies between prototypes and/or with mobile vehi-cles.
The mobile laboratory (Renault Master) has been used as experimental support when researchers/students have realized flights using small airplanes on an aeromodelism test track. The experimental site for intelligent vehicles SEVILLE UTC is operational since December 2013 and has already been used for experiments. A flight arena is being fina-lized closed to the SEVILLE site. It will allow to realize flights in outdoor conditions, on a surface of 18 x 36 meters and with a height of 7 meters. It will be completely surrounded by a wire mesh and a net on top.
Concerning the intelligent vehicles, a control-ler of the actuators of the Fluence ZE using a joystick has being developed and validated. This vehicle is also equipped with several cameras, two lidars and 6 radars. The two Renault Zoe have been actuated by Renault. The control system is able to fully actuate the vehicle by using a computer and seve-ral cooperative modes have implemented to share the control with a driver. The integration has been validated on several use cases and several tests have been conducted to control le vehicle autonomously on the SEVILLE test track using stereo-vision at low speed. The Zoes have also been used to log data for loca-lization studies. The VIL (Vehicle In the Loop) test equipment has been specified and a pro-vider has been selected for its realization.
Experimental PlatformsEquipex Robotex
47

Labex MS2T Activity Report 2013-201448
Trai
ning
: Mas
ter’s
deg
ree
in In
tera
ctin
g C
om
ple
x S
yste
ms
Labex MS2T Activity Report 2013-2014
> IntroductionThe Master’s degree in Interacting Complex Systems (MICS) forms an integral part of the laboratory of excellence (Labex) “Control of System of Systems” education program. MICS issues a national Master’s degree fully accredited by the French Ministry of Higher Education (spring 2012).The course modules tie in with the Labex re-search program: •Coursesarebasedon the laboratories’areas of expertise • Labex experimental platforms (SyNe-Mus, PILCAM2) and the Equipex equipment (Robotex and Figure).
> Course organisationThe MICS is organised into 4 semesters spread over two years.Students having obtained a 180 ECTS Bachelor of Science degree (or equivalent) can apply to the M1 level. Students having already completed a course at Master’s level in the specialities covered by MISC can access the M2 level directly.In M1, students take some common core courses in addition to classes they choose based on their career plans: • Scientific and engineering modules onSystem Engineering, Optimisation, Expe-rimental Data Analysis, Dependability and Safety, Scientific Computation Tools, Knowle-dge-based Management Techniques, Control and Automation, etc.
•Modules in communication, management,project management, methodology and bibliographic synthesis methods.In M2, the first semester is divided into two terms: • Common core courses covering thebasic concepts of TSoS, • A second segment where students areable to customise their studies and area of specialisationIn the second M2 semester, students carry out a personal project (Master’s thesis) in a public or private research environment and under the supervision of a professional re-search scientist.Students who successfully complete the MICS Master’s degree can apply for profes-sional positions in the area of research deve-lopment and innovation, in either private or public environments with positions ranging from expert research scientists to R&D project managers, experts in formal methodologies, and more.The choice of specialisation is essentially defined by the choice of complementary subjects, in order that the individual courses followed by the student match his/her career plans, thereby facilitating the student’s inte-gration into the professional world or his/her pursuit of a PhD.
Training: Master’s Degreein Interacting ComplexSystemsPresentation of the Master’s DegreeHead of training: Philippe Bonnifait
49
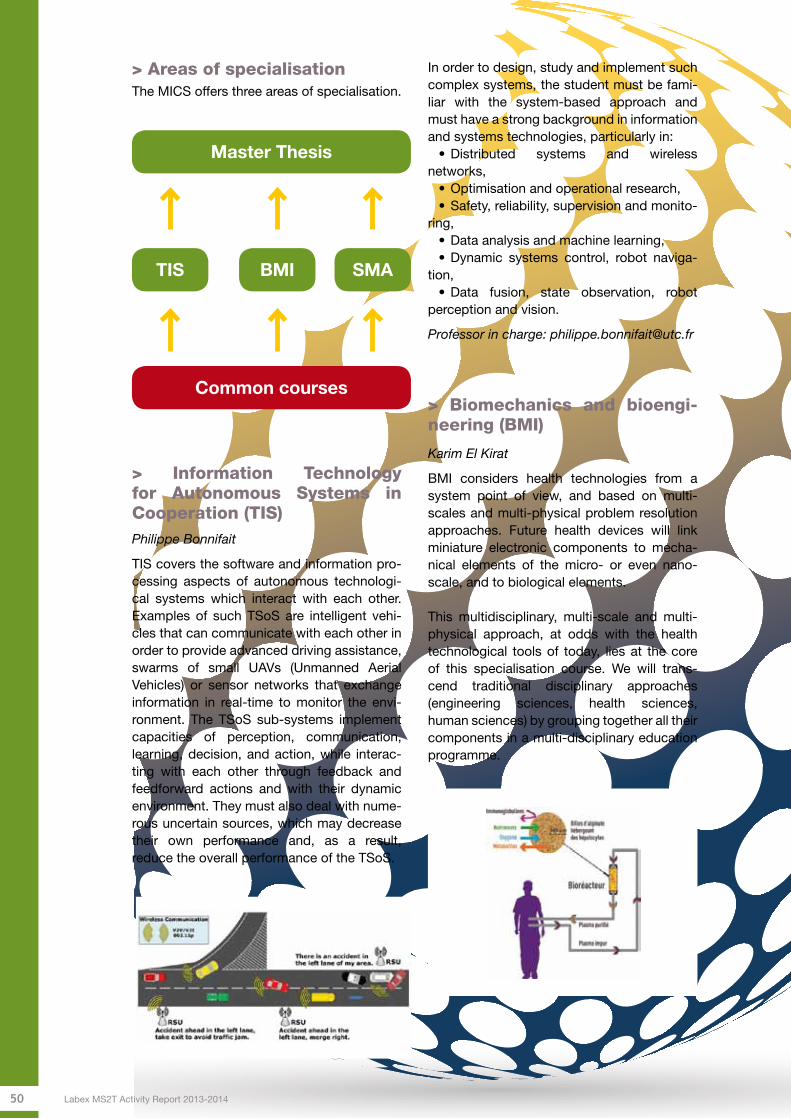
Labex MS2T Activity Report 2013-2014
Master Thesis
TIS SMABMI
Common courses
> Areas of specialisationThe MICS offers three areas of specialisation.
> Information Technology for Autonomous Systems in Cooperation (TIS)Philippe Bonnifait
TIS covers the software and information pro-cessing aspects of autonomous technologi-cal systems which interact with each other. Examples of such TSoS are intelligent vehi-cles that can communicate with each other in order to provide advanced driving assistance, swarms of small UAVs (Unmanned Aerial Vehicles) or sensor networks that exchange information in real-time to monitor the envi-ronment. The TSoS sub-systems implement capacities of perception, communication, learning, decision, and action, while interac-ting with each other through feedback and feedforward actions and with their dynamic environment. They must also deal with nume-rous uncertain sources, which may decrease their own performance and, as a result, reduce the overall performance of the TSoS.
In order to design, study and implement such complex systems, the student must be fami-liar with the system-based approach and must have a strong background in information and systems technologies, particularly in: •Distributed systems and wirelessnetworks, •Optimisationandoperationalresearch, •Safety,reliability,supervisionandmonito-ring, •Dataanalysisandmachinelearning, •Dynamic systems control, robot naviga-tion, •Data fusion, state observation, robot perception and vision.
Professor in charge: [email protected]
> Biomechanics and bioengi-neering (BMI)
Karim El Kirat
BMI considers health technologies from a system point of view, and based on multi-scales and multi-physical problem resolution approaches. Future health devices will link miniature electronic components to mecha-nical elements of the micro- or even nano-scale, and to biological elements.
This multidisciplinary, multi-scale and multi-physical approach, at odds with the health technological tools of today, lies at the core of this specialisation course. We will trans-cend traditional disciplinary approaches (engineering sciences, health sciences, human sciences) by grouping together all their components in a multi-disciplinary education programme.
50

Sci
entifi
c R
epo
rt
Labex MS2T Activity Report 2013-2014
Trai
ning
: Mas
ter’s
deg
ree
in In
tera
ctin
g C
om
ple
x S
yste
ms
The specialty has the following main subjects of study: •Livingsystemsmodelling, •Micro/nano-biosystems, • Weakly structured data processing andknowledge extraction, •Physicalrealityandcomplexitymanage-ment, •Fluidmechanicsandturbulence, • Multi-scale and multi-physical analysisand inverse problems, • Biomechanics, biomaterials and humantissue engineering.
Professor in charge:[email protected]
> Mechatronic systems and advanced mechanics (SMA)
Christine Prelle
The objective of SMA is to educate students in the field of mechanical engineering, focu-sing on material characterisation and design, mechanical structures modelling and mecha-tronic systems modelling. Mechanical model-ling requires the modelling and simulation of physical complex phenomenon within the framework of a multi-scale and multi-physi-cal approach. This implies the implementation and management of modelling and optimisa-tion methods and tools, which are integrated into a systemic approach.
SMA concerns students in mechanics who want to open their mind to system engineering and are able to integrate different physics or technologies, as well as students in mechatro-nics who want to increase their knowledge in optimisation and multidisciplinary simulation techniques.
This area of specialisation educates students in robust and/or optimised conception methods for structures or pluri-technological systems, and in the main modelling and simulation tools used in R&D. Special courses are also offe-red for original applications (smart materials, innovative transducers and actuators, integra-ted systems, etc.) to prepare students for the pending breakthrough in the fields covering materials and systems.In order to design, study and implement such systems, the student must have a strong background in mechanical engineering and technological mechatronics, particularly in: •Digitalmodellingandsimulation, •Multi-disciplinaryoptimisation, •Robustdesign, •Systemengineeringandintegration, •Compacttransducersandactuators.
Professor in charge: [email protected]
51

Labex MS2T Activity Report 2013-2014 52
M1 8
M2 TIS 17
M2 BMI 8
M2 SMA 20
Total 53
M2 courses have opened for the first time this year. Courses description is available on the UTC website. We report in this section some key figures and internship master Labex dissertations.
> Registered students forthe 2013-2014 academic year
Summary of the academic year 2013-2014
> M2 Internships (master thesis) in the Labex MS2T
Student Supervisors Subject Speciality Dates Defense
CarriouVincent
Boudaoud SofianeMultiphysical Muscle Modelling
by Numerical ApproacheBMI
Feb 2014July 2014
July 2014
NguyenXuan Huy
Petit Laurent Prelle Christine
Design of a digital 3D electroma-gnetic actuator with 8 discrete
positionsSMA
Feb 2014July 2014
July 2014
XuJinjhui
Schon Walter Sallak Mohamed
Qiu Siqi
Simulation and evaluation of dependability of railway systems
using a RCCS (Route Control Centre System)
TISFeb 2014Aug 2014
Sept 2014
DangVan Tuan
Salsac Anne-VirginieVillon Pierre
Barthès-Biesel Dominique
Flow of capsules througha capillary network
BMISMA
Feb 2014Aug 2014
July 2014
FangXi
Ho Ba Tho Marie ChristineSangeux Morgan
Finite element modelling of biomechanics systems, Applica-
tion to hip disorder in childrenBMI
Feb 2014July 2014
July 2014
StanoiOana
Fantoni IsabelleBonnifait Philippe
Mobile Robots Cooperation with Biased Exteroceptive Measure-
mentsTIS
Feb 2014Aug 2014
Sept 2014
YuLi
Frémont VincentNatalazio Enrico
Optimal hybrid camera network coverage using distributed struc-
ture from motion algorithmTIS
Feb 2014Aug 2014
Sept 2014
Note: Every M2 master student did an internship. This table only reports those who did it in the Labex’s labs.
M1 25
M2 TIS 26
M2 BMI 15
M2 SMA 21
Total 87
> Admitted students for the coming academic year 2014-2015
52

Trai
ning
: Mas
ter’s
deg
ree
in In
tera
ctin
g C
om
ple
x S
yste
ms
53Labex MS2T Activity Report 2013-201452
M1 25
M2 TIS 26
M2 BMI 15
M2 SMA 21
Total 87
Responses to the Recommandationsof the International Advisory Committee
In September 2013, the Labex committee formulated several suggestions that are recalled hereafter. The new Master degree program demonstrates a good adequacy between courses and re-search. Some common courses on complexity or system integration could benefit to M2 stu-dents. The program should be responsive to French industry and if possible use internet to cover courses to all French-speaking or all EU. It would be desirable to have a higher involve-ment of industry at all levels: Master program, PhD theses, and advisory committee. Also, an “Industry day’’ could be set up to promote Labex’s research to industry.Additional were the following: • Go for Erasmus/Marie Curie actions: visibility and attractiveness; • Involve Master students in Labex’s research; • More courses (on complexity, system integration, data analytics,...); • Strong heterogeneity of student back-ground: more common courses.
Even if creating new M2 courses was a busy activity for the teaching staff, several actions have been taken to address these recom-mendations. Please notice that to address the strong heterogeneity of students’ background, the M2 program is already built around a com-mon core made of 4 modules.
First, a reflection is presently under way in the field of “system engineering” to reinforce the M1 course entitled “Introduction to sys-tem engineering” and to add a new one at the beginning of the first M2 semester. A one-day meeting has been set with colleagues from Nancy University who have already settled a Master on system engineering for several years. Working meetings have been program-med in November 2014 to study more deeply the feasibility of this orientation.
Regarding the involvement of students in Labex’s research, the master provides several efficient mechanisms. One is coming from pro-jects that can be studied in parallel of the first part of the M2 semester as part of a dedicated teaching unit. Secondly, Labex’ seminars are opened to master students who are strongly encouraged to follow them throughout the year. They can select one, work on several papers of the speaker and present a synthesis in front of a panel to get ECTS credits. Thir-dly, several Master projects are proposed each year by researchers involved in the Labex. Students interested can apply to these and can get scholarships (800€/month). This year, 7 master students have been selected in view of their academic level and motivation. Regarding the interaction with industry, this was essentially done through internships in companies for many students who were more interested by finding an engineer position than doing a PhD. No industry day has been set already but this is a good idea that needs to be studied more in details. Finally, an engineer from Dassault Systèmes has accepted to be member of the advisory committee of the offi-cial university master board. Concerning the suggested new courses, Do-minique Luzeaux gave us a seminar on “Com-plexity science and systems engineering” in April 2014. This will help us to design new contents with respect to those that already exist in the different courses. Finally, an action has been initiated with the University of Genova (through Prof. Roberto SACILE) in order to study Erasmus/Marie Curie program in the field on TIS. A partnership agreement was signed this year between the two universities and it is foreseen exchanges between students from a master of Genova and some of UTC.

Labex MS2T Activity Report 2013-2014 54
The fundamental principle underpinning the development of the Labex MS2T is to create a solid and robust partnership base, based on an ambitious strategy which integrates the regional, national and international innovation ecosystem. Within this framework, the CM In-ternational consultancy firm was appointed in June 2012 to lead discussions on the strategy for promoting Labex MS2T and its implemen-tation.Several phases have already been comple-ted: targeted meetings with several players from industry and institutions, international benchmarking of the best industrial transfer systems, interviews with a dozen world ex-perts on the subject of systems of systems, and half working days with Labex MS2T members. The study will be presented to the International Advisory Committee in October 2014.
The idea is to create a partnership base in the form of a club of industrial players. The major challenges facing this club will be the following:
•Theadoptionofa«systemic»approachcovering all stages of R&D, from scientific research to pre-industrial applications. •Theinterfacingofaecosystemofscien-tific and technological partnerships with the best academic centres, the industrial fabric and regional communities. •Theinvolvementofahardcoreofindus-trial players enabling Labex MS2T to main-tain, over time, applicative research in line with market and citizen requirements. •Thecollaborationwithindustrialplayersfavouring an approach of open innovation, bringing together players from the same
industrial sector around common technologi-cal challenges.
The processes, shared roadmaps and legal and financial aspects are being defined with the first group of the Labex partners’ club. Our strategy will then consist of incorporating into this first group all companies wishing to contribute (in collaboration with Labex MS2T) to the development of systems of systems, which are already collaborating for the most part with research teams of the 3 laboratories.
Our industrial transfer system will initially make provision for promoting the results to industrial partners which actively participate in the funding and coordination of applied R&D programmes. The intellectual property of the prior knowledge of Labex MS2T members belongs to UTC and CNRS. Joint knowledge developed with industry as part of collabora-tive projects (European, ANR, FUI, etc.) will fall under the regime negotiated for consor-tium agreements. Lastly, the property of bila-teral industrial projects (MS2T/partner) will be defined on a case-by-case basis.
The Labex MS2T industrial partners’ club will form part of the UTC local innovation system designed in terms of a partnership space grouping together the university, companies and the authorities of the Compiègne region (several interviews were conducted in 2012 and 2013 with a view to this collaboration). This establishment will take on its full meaning in the development of pilot systems of sys-tems on the territory, in the fields of intelli-gent transport, the environment and health. Through the ecosystem, the club will aim to bring together various players (political, aca-
Industrial Transferand Partner RelationsOrganisation of the Industrial Transfer of Labex MS2Tactivities
54

Ind
ustr
ial t
rans
fer
and
Par
tner
Rel
atio
ns
55Labex MS2T Activity Report 2013-201454
Organisation of the Industrial Transfer of Labex MS2Tactivities
demic and industrial) around the issues regar-ding SoS and to strengthen developments by relying on systems and organisations located close by: the UTC Innovation Centre, the UTC Foundation, the Rives de l’Oise Technology Park, Industrilab, INERIS, CETMEF, CETIM, etc.
Within the framework of multimodal trans-port and logistics systems, Labex MS2T will rely on the dynamic approach of the i-Trans competitiveness cluster, which has brought together the main players of the Nord Pas de Calais and Picardy regions since 2005. Within the larger framework of the ICT sector, Labex MS2T will also have a strong connection to the Systematic cluster, which brings together the Parisian industrial fabric in the fields of transport, safety, energy management, free software, and systems and telecoms design.
The dissemination of the results will take dif-ferent forms, the first one being high-level scientific publications in international journals, PhD dissertations, books and chapters, in ad-dition to patents derived from MS2T research activity. Labex MS2T has a presentation web-site and secure intranet dedicated to colla-borative writing. The 3 laboratories already present their work on a regular basis at a variety of events to promote science. Moreo-ver, Labex MS2T will participate in internatio-nal, national and regional events: workshops, trade fairs, research and innovation week, the science festival, etc.
Finally, expertise and consultancy will also be platforms for dissemination, just like the par-ticipation of Labex MS2T in standardisation consortia. Heudiasyc is already an accredited, qualified expert recognised by the French Mi-nistry of Transport, and as such cooperates with the Railway Certification Agency (Certi-fer) to assess the safety of railway transport systems. The laboratory also participated in the work performed by the AUTOSAR consor-tium, used by all car and component manu-facturers regarding embedded electronics. The heterogeneousness of the systems to be integrated (as part of the systems of systems) of course results in specific problems.
With this in mind, Labex MS2T has been a member since June 2012 of AFIS(8) and sits on its Board of Directors. Discussions are currently underway to collaborate with IRT SystemX. This will strengthen the spectrum of
Labex MS2T partnership opportunities in the field of systems of systems.
In conclusion, the Labex MS2T Industrial transfer and Partner relations strategy is being developed and will become fully ope-rational in the coming months. The objective is twofold: • Ensuring the smooth implementationof collaborative projects with our partners and co-developing ambitious and long-term research projects with the club members. • Designing and implementing, as soonas possible, technology transfer and business creation processes within the innovation eco-system driven by UTC and with the help of SATT Lutech, when the first results specific to Labex MS2T will be mature enough to explore the problems related to their marketing.
Cofunding - PhD, Post-doc and plateforms engineer (2013-2014)
•RegionalCouncilofPicardy
•FEDER-Europe
•ALSTOM
•DGA
(8) AFIS: French Association of System Engineering

Labex MS2T Activity Report 2013-2014
2014> INDS 2014International Conference on Advanced Networking, Distributed Systems and Appli-cationsDate: 30 June - 3 July 2014Location: Béjaia, Algeria(Sponsor, organization with Harvard University - USA, and University of Bejaia)
> MUVS 2014International workshopon Multi Unmanned Vehicle SystemsDate: 30 June - 3 July 2014Location: Compiègne, France(Sponsor)
> WiSARN 20148th International Workshop on Wireless Sensor, Actuator and Robot NetworksDate: 22-27 June 2014Location: Benidorm, Spain(Sponsor)
> Belief 20143nd International Conference on Belief FunctionsDate: 26-28 September 2014Location: Oxford, UK(Sponsor)
> Innorobo 2014International professional show dedicated to service roboticsDate: 18-20 March 2014Location: Lyon, France
> Visit by Anne Renault, Director of the Interdisciplinary Mission at the CNRSThe Labex MS2T received the visit of Anne Renault, Director of the Interdisciplinary Mis-sion at the CNRS, and of Vincent Benavent, the Deputy of the Regional Representative Nord Pas de Calais-Picardie (DR18 du CNRS) on the 3rd October 2013.
> Interview with P. Bonnifait on autonomous vehiclesPhilippe Bonnifait, professor at Heudiasyc and Labex MS2T, answers questions from the Institute of Information Sciences and their interactions of CNRS (INS2I) on autonomous vehicles.
Conferences and Events
56

Co
nfer
ence
s an
d e
vent
s
57Labex MS2T Activity Report 2013-2014
> PAMU in the newsHeudiasyc and Labex MS2T involved in the project of self-parking of Renault:Renault presents his “UMAP” project - Advanced Platform for urban mobility, in which the Heudiasyc laboratory participates. This project of self-parking embeds percep-tion and real-time location system for its autonomous navigation, which has been closely developed with the laboratory during several years of collaboration with Renault.The main challenge for the Heudiasyc labo-ratory was to study and make work a real-time computer system which uses very low cost automotive components (a GPS receiver, CAN bus sensors, smart cameras, microwave function radar and a very special map naviga-tion), with strong integration constraints, into a standard electric vehicle, making it autono-mous and safe for a low-speed navigation in a dynamic environment shared with pedes-trians and other vehicles.These research topics are also covered by Heudiasyc in the framework of the Equipment of Excellence “Robotex”, coordinated by CNRS, with an experimental platform at the UTC dedicated to the autonomous electric vehicles, supported by the Regional Council of Picardy and the Europe (FEDER). La Pari-sien - Le Monde - Les Echos - TV : France 3 : Véhicules intelligents
•LeParisien,“Des ingénieurs de Compiègne planchent sur la voiture du futur”, 2 April 2014•LesEchos,“Renault crée le service voiturier du futur, sans chauffeur, avec l’UTC”, 14 April 2014•France3Picardie,“La voiture mains libres de l’UTC”, 24 April 2014•AgirenPicardie,N°164,“Le labo Heudia-syc, “cerveau” de la voiture sans chauffeur de Renault”, May 2014•Magazine60,N°105, “La voiture du futur s’invente dans l’Oise”, June 2014
> The Labex MS2T is honored in the book “Picardie : l’ambition de l’excellence” published by the Picardy Region.
> Google Research AwardAntoine Bordes, CNRS researcherer at the Heudiasyc laboratory and Labex MS2T, just received a Google Research Award. This award has been given globally to 105 lau-reates out of 550 proposals received.The research project of Antoine Bordes granted by this award is linked with the ANR project EVEREST held by the researcher. The project aims to develop new models of repre-sentation for multi-relational data, with a par-ticular interest in the knowledge bases, these directed labeled graphs where concepts are associated with nodes and relations with arcs. The main objective is to propose methods for modeling such data, especially when their di-mensions are very large (millions of nodes and thousands of types of relations) to enhance them, that is to say to view, complete and summarize them.

Labex MS2T Activity Report 2013-2014 5858
2013> 1st meeting of IAC - Interna-tional Advisory CommitteeThe first meeting of the International Advisory Committee was held on September 4, 2013, where all members of the committee could be present, except for Alberto Broggi, who had a keynote speech scheduled at the IEEE VT Conference. The morning sessions consisted in oral presentations given by the Labex re-presentatives. The first session was devoted to the overview of the project, the innovation strategy, the Master program and the inter-national programs; the second session was devoted to the presentation of the research topics. The scientific discussions continued after lunch, with poster presentations. Then, the main experimental platforms related to the Labex activities were shown to the mem-bers of the committee. The final session was dedicated to the discussions between the members of the committee by itself, with two members of the Labex staying in the room for taking establishing the minutes and for answe-ring questions. Finally, the conclusions of the committee were delivered to the Labex repre-sentative by Mo Jamshidi, president of the International Advisory Committee. Except for the last discussion session, the were open to the representatives of the Labex and also with Bruno Bachimont, acting as the head of research at UTC, Raja Chatila, acting as the scientific deputy director of INS2I insti-tute of CNRS, Nelly Lacome, acting as coor-dinator of reserarch at Sorbonne Universités, and Arounie Tavenet, acting as scientific coor-dinator of ANR.
> 1st International Workshop on “Systems of Systems in Technology Foundations”(see Appendix 7)
The first international workshop of Labex MS2T “Systems of Systems Technology Foun-dations” was held at the University of Techno-logy of Compiègne on September 5th and 6th 2013 with about a hundred participants. Four-teen conferences were given by international specialists in Systems of Systems and/or in biomechanics, bioengineering, information technologies communication, mechanics and robotics applied on Transport and Mobility, Health Technology and Engineering, Security and Environment.All speakers provided their vision of Systems of Systems (SoS) and how it is or could be used in their showcase examples. The workshop started with the world leader in the field Mo Jamshidi who recalled us the definition of SoS and presented a case of Big Data. Peter Henshaw completed the definition by explaining the priorities of the research in the field of SoS at the international level, in some topics (for example theory and charac-terization of SoS, Multilevel Modelling of SoS, Human aspects of SoS). Then the complexity of different systems was presented particularly in Health Care System as demonstrated by Peter Rutherford. The need to handle complex biological systems (example of the nervous system) by having a multiscale approach was clearly shown by Lynne Bilston. This approach was also illustra-
5958

Co
nfer
ence
s an
d e
vent
s
59Labex MS2T Activity Report 2013-20145858 59
ted for smart territories as presented by Ro-nan Stephan. Another showcase provided by Olivier Simonin concerned the self organized systems and bio-inspired agents as behavior-based models with illustrations of robots and intelligent environments.Relevance of understanding the risk, its assessment and management was presented by Terje Aven, which is of importance to deci-sion making but also understanding data and provided decision rules as demonstrated Ro-man Slowinski. Other concrete applications using open plat-form at planetary scale (planetlab) were exhi-bited by Serge Fdida and real time simulation
using optimization, inverse identification for virtual surgical planning by Paco Chinesta.To conclude the workshop, added value of the Architecture Frameworks for SoS was pre-sented by Jean-Luc Garnier and examples of large scale complex systems with a global view of SoS by Dominique Luzeaux.
The workshop showed the different aspects of SoS, a synthesis of all the presentations has been proposed in the figure below.
Finally, the common point of the showcases in various applications fields were the different scale (multiscale, large scale), the complexity of the systems, the generation of numereous and heteregeneous data to be considered with uncertainties, leading subsequently to new
reflections to define “Foundations of Systems of Systems in Technology”.
Special thanks to the organisation committee of the workshop.
SoS
SoSConstruction
Science Paradign
(Bruno Bachimont, Head of Research UTC)
Framework
Theoretical foundations aresearched as such:
> A de�nition / characterization (M. Jamshidi, D. Luzeaux, J.L. Garnier, M. Henshaw)> A formation> Methodology (J.-L. Garnier, D. Luzeaux)> A unifying concept that founds a discipline: e.g. information and Cybernetics (M. Henshaw)> Emergence (O. Simonin)
SoSTranslation
A reduction strategy is applied tohandle SoS:
> Uncertainty management and decision tools (R. Slowinski)> Data Analytics (M. Jamshidi)> Testbed Networks (S. Fdida)> Usability (P. Chinesta)> Computational vademecums (P. Chinesta)
SystemDeconstruction /SoS complexity
SoS is way of thinking.
> Complexity (P. Rutherford)> Multiscale approaches (L. Bilston)> Risk (T. Aven)> Real-time (P. Chinesta)> Self-organized / holonic / bio-inspired SoS (O. Simonin)> Smart territories (R. Stephan)> Systemics (D. Luzeaux)

Labex MS2T Activity Report 2013-2014
> UAV DemonstrationsFrom the 10th to the 13th October, Labex MS2T took part in the Science Fair 2013 in France.
> BWCCA’138th International Conference on Broadband and Wireless Computing, Communication and ApplicationsDate: 28-30 October 2013Location: Compiègne, France (Sponsor)
> RED-UAS’13Workshop on Research, Education and Deve-lopmentof Unmanned Aerial SystemsDate: 20-22 November 2013Location: Compiègne, France (Sponsor)
> ISIPTA’13Eighth International Symposium on ImpreciseProbability: Theories and ApplicationsDate: 2-5 July 2013Location: Compiègne, France (Sponsor)
> IEEE SOSE 20138th International Conference on System of Systems EngineeringDate: 2-6 June 2013Location: Maui, Hawai, USA(Participation: A. Bouabdallah)
> Paris Air Show 2013The Heudiasyc laboratory and Labex MS2T had presented its drones on the 18th June 2013 at the Paris Air Show on the “Pavillon Picardy”.
Organisation committee: Yacine Challal, Sébastien Destercke, Mohamed Sallak, Piotr
Breitkopf, Laurie Herlin, Catherine Lacourt, Marie-Christine Ho Ba Tho, Pierre Feissel,
Thierry Denoeux, Sabine Bensamoun, Sofiane Boudaoud, Karim El Kirat and missing on
the picture Frédéric Lamarque, Tien Tuan Dao and Mylène Masson.
60

Hum
an R
eso
urce
s
61Labex MS2T Activity Report 2013-2014
> Permanent members from associated laboratories
Labex Members
Assistance steering and coordination OfficerLaurie Herlin
The recruited person occupy a help function to project coordination, under the hierarchical authority of the bearer of Labex. She will ensure a role interface between the direction of Labex and the directorates and services that interact with the Labex: Research, Doctoral School, International Relations, Human resources, Financial...Her tasks and activities are various:•HelpingthedirectionofLabexMS2Tindevelopingitsvarioustoolsandapproaches•Coordinatethepreparation,consolidationandthehandingreportsincompliancewithdeadlines specified by the ANR regulation•Ensuremonitoringandthereportingcallstointernalprojects•Conductdashboards,ensurethemonitoringofindicators,producebalancesheets,statisticsallowing a optimum scientific piloting of Labex•Coordinatetheorganizationofdays,seminarsandotherscientificmanifestationsofLabex
Human Resources10
PhD students including1 cofunding DGA and
1 cofunding The Picardy Region
4PhD students will begin inseptember/october 2014
1platforms engineer cofunded
by The Picardy Regionand Feder
5International visitors
(Visiting Chair)on the period 2013-2014
7Post-docs including
1 cofunding ALSTOM
1Assistance steering
and coordination Officer
Researchers &Lecturer-researchers
Administrative,technical & personnel
serviceLabex MS2T
Heudiasyc 47 13 43BMBI 25 10 12Roberval 47 11 14PhDs funded by the Labex 10
Post-docs funded by the Labex 7PhDs and Post-docs non funded by the Labex 35
Total Labex MS2T 119 124

62 Labex MS2T Activity Report 2013-2014
Contribution of personnelthrough guardianship
Contribution of FTEthrough guardianship
72%UTC
28%CNRS
57%UTC
43%CNRS
72%UTC
28%CNRS
57%UTC
43%CNRS
> Procedure to becomea Labex memberLabex is open to the inclusion of new mem-bers from the three laboratories, in order to reinforce the effect of local training.The approach to take is as follows:•The«candidate»formembershipdrafts1to2 pages specifying his interest and integration in labex (in what area? to do what?) accompa-nied with a detailed CV (including a list of the candidate’s publications).• At first, an opinion will be formulated bythe Labex steering committee, and the International Scientific Council may be solicited if necessary.
Recruitment Policy> PhD studentProcedure for thesis selection:The thesis system is implemented in close col-laboration with the Doctoral School. It follows the following approach:•Callforsubjectsdistributedinternally•Interviewofprojectsponsorsbyaselectioncommittee• Distribution of subjects by the DoctoralSchool and Labex•InterviewofPhDcandidatesaccordingtotherules of the Doctoral School For better internal coordination at the UTC with the «Collegium UTC/CNRS» thesis system (for cross-discipli-nary subjects between the UTC laboratories – of which at least one must be the research committee FR SHIC, comprised of the 3 Labex partner laboratories), a single Labex/Collegium selection committee was created and is com-prised of: an extended Labex steering com-mittee, Collegium Management, Director of the Doctoral School, Research Director at the UTC (the people proposing the subjects do not participate in the commission’s work).
Chair proposals -Recruitment process > Chair of ExcellenceAn MS2T chair of excellence, targeting interna-tionally renowned researchers working at the site on a full-time basis, over a three-year pe-riod. Labex will provide strong support, based on a scientific programme: salary, doctoral and post-doctoral grants, dedicated reception area, assignments, etc.• 3 such chairswill be proposed throughoutthe project’s duration.•TheChairholderwillcoordinateaninterdis-ciplinary research programme concerning at least one of the three axes of the MS2T labora-tory of excellence (interaction and cooperation between systems, management of uncertain-ties in the TSoS, design and optimisation of TSoS).He/she must have international scientific recognition in at least one of the disciplines concerned (automation, robotics, operational research, networks, artificial intelligence, etc.) and strong knowledge of at least one other discipline. Furthermore, he/she must have experience in interdisciplinary research in the field of complex systems or SoS. In terms of education, he/she will be responsible for im-plementing the crossdisciplinary TSoS at UTC and setting up new teachings on SoS.
> Visiting ChairAlso targets internationally renowned resear-chers, but who keep their original affiliation and undertake to visit the laboratory of one to three months per year.

Fin
ance
Finance
20,60%
13,43%
8,60%
28,05%
4,18%
0,78%5,55%
1,79%0,75%
2,69%1,94%
3,85%0,49%
7,31%
0,75%
Human Resources
83,47%
11,94%
3,85%
Operating expenses
Equipment
Management expenses
Chair of Excellence
Associate Chair
Postdocs
PhDs
Development Engineer
Platform Engineer
Administrative staff
CSI
Equipment
Service provision
Travel / conferences
Other external expenses
Management expenses
Statutory personnel
20,60%
13,43%
8,60%
28,05%
4,18%
0,78%5,55%
1,79%0,75%
2,69%1,94%
3,85%0,49%
7,31%
0,75%
Human Resources
83,47%
11,94%
3,85%
Operating expenses
Equipment
Management expenses
Chair of Excellence
Associate Chair
Postdocs
PhDs
Development Engineer
Platform Engineer
Administrative staff
CSI
Equipment
Service provision
Travel / conferences
Other external expenses
Management expenses
Statutory personnel
Breakdown of the total budget over 9 yearsby items of expenditure
Breakdown of the total budget over 9 yearsby type of expenditure
€6.7 million grant for nine years of State funding (2011-2019)
63Labex MS2T Activity Report 2013-2014

64 Labex MS2T Activity Report 2013-2014
Appendices
Appendix 1: Labex members ..................................................................................... 65
Appendix 2: International Advisory Committee members .......................................... 66
Appendix 3: PhDs and Post-docs in progress .......................................................... 68
Appendix 4: Open call for MS2T Research Chairs in Systems of Systems ............... 87
Appendix 5: Open call for Visiting Scholars: Labex MS2T Fellowships ..................... 89
Appendix 6: Publications (2013-2014) ....................................................................... 90
Appendix 7: 1st International Workshop on “Systems of Systemsin Technology Foundations” - Program ....................................................................... 95
64

65Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Appendix 1 - Labex members
Labex MS2T permanent membersABDALLAH Fahed MCF UTC Heudiasyc
ABEL Marie Hélène MCF UTC Heudiasyc
BACHIMONT Bruno ECC UTC Heudiasyc
BARTHES Jean Paul PR UTC Heudiasyc
BENSAMOUN Sabine CR CNRS BMBI
BONNIFAIT Philippe PR UTC Heudiasyc
BORDES Antoine CR CNRS Heudiasyc
BOUABDALLAH
Abdelmadjid PR UTC Heudiasyc
BOUDAOUD Sofiane MCF UTC BMBI
BOUVIER Salima PR UTC Roberval
BRANCHERIE Delphine MCF UTC Roberval
BREITKOPF Piotr IR CNRS Roberval
CANON Francis MCF UTC BMBI
CARLIER Jacques PR UTC Heudiasyc
CASTILLO GARCIA Pedro CR CNRS Heudiasyc
& UMI LAFMIA
CHALLAL Yacine MCF UTC Heudiasyc
CHARARA Ali PR UTC Heudiasyc
CHERFAOUI Véronique MCF UTC Heudiasyc
DAO Tien Tuan IR BMBI
DENOEUX Thierry PR UTC Heudiasyc
DESTERCKE Sebastien CR CNRS Heudiasyc
DHERBOMEZ Gérald IR CNRS Heudiasyc
DUBUISSON Bernard PR UTC Heudiasyc
DUCOURTHIAL Bertrand PR UTC Heudiasyc
EGLES Christophe PR UTC BMBI
EL KIRAT Karim MCF UTC BMBI
EYNARD Benoit ECC UTC Roberval
FANTONI Isabelle CR CNRS Heudiasyc
FAVERGEON Jérôme MCF UTC Roberval
FEISSEL Pierre MCF UTC Roberval
FOKAPU Odette MCF UTC BMBI
FREMONT Vincent MCF UTC Heudiasyc
GAPENNE Olivier PR UTC BMBI
GOVAERT Gérard PR UTC Heudiasyc
GRANDVALET Yves DR CNRS Heudiasyc
HO BA THO
Marie Christine PR UTC BMBI
JOUGLET Antoine MCF UTC Heudiasyc
LAFORET Jérémy IR CNRS BMBI
LAMARQUE Frédéric MCF UTC Roberval
LECLERC Eric CR CNRS BMBI
LEGALLAIS Cécile DR CNRS BMBI
LENNE Dominique PR UTC Heudiasyc
LOZANO Rogelio DR CNRS Heudiasyc
& UMI LAFMIA
LOURDEAUX Domitile MCF UTC Heudiasyc
MARIN Frédéric PR UTC BMBI
MARQUE Catherine PR UTC BMBI
MASSON Mylène MCF UTC Heudiasyc
MAZERAN
Pierre Emmanuel MCF UTC Roberval
MORIZET
MAHOUDEAUX Pierre PR UTC Heudiasyc
MOUKRIM Aziz PR UTC Heudiasyc
NACE Dritan PR UTC Heudiasyc
NATALIZIO Enrico MCF UTC Heudiasyc
PERREY DEBAIN
Emmanuel MCF UTC Roberval
PONCIN Cécile IE UTC Heudiasyc
PORRAS Dominique IR CNRS Heudiasyc
POSS Michael CR CNRS Heudiasyc
PRELLE Christine PR UTC Roberval
QUOST Benjamin MCF UTC Heudiasyc
RASSINEUX Alain PR UTC Roberval
ROELANDT Jean Marc PR UTC Roberval
SALLAK Mohamed MCF UTC Heudiasyc
SALSAC Anne Virginie CR CNRS BMBI
SCHON Walter PR UTC Heudiasyc
SERAIRI Mehdi ECC Heudiasyc
SHAWKY Mohamed PR UTC Heudiasyc
TALJ Reine CR CNRS Heudiasyc
THOUVENIN Indira ECC UTC Heudiasyc
USUNIER Nicolas CR Heudiasyc
VAYSSADE Catherine IR CNRS Roberval
VEILLERETTE Samuel IR CNRS Heudiasyc
VILLON Pierre PR UTC Roberval
VICTORINO Alessandro MCF UTC Heudiasyc
Temporary positions funded by Labex MS2TAL HAJJAR Hani Post-doc Roberval
AL HARRACH Mariam PhD BMBI
ARDUIN Pierre Emmanuel Post-doc Heudiasyc
BORDES Jean-Baptiste Post-doc Heudiasyc
CALLEBERT Lucile PhD Heudiasyc
FIGUEIREDO Rosa Post-doc Heudiasyc
HERLIN Laurie AI Heudiasyc
HOANG Tuan PhD BMBI
PUTHIYA PARAMBATH
Shameem PhD Heudiasyc
QIU Siqi PhD Heudiasyc
RADAK Jovan Post-doc Heudiasyc
RAULT Tifenn PhD Heudiasyc
SAHLI Abderrahim PhD Heudiasyc
SAIF Osamah PhD Heudiasyc
SANAHUJA Guillaume IR Heudiasyc
SEVENIE Benjamin PhD BMBI
TOUATI Lyes PhD Heudiasyc
VIDAL Guillaume Post-doc BMBI
65

66 Labex MS2T Activity Report 2013-2014
TERJE AVEN, UNIVERSITY OF STAVANGER, NORWAYTerje Aven is professor of Risk Analysis and Risk Ma-nagement at the University of Stavanger (UiS) (1992-). He is a Principle Researcher at the International Research Institute of Stavanger (IRIS).He has participated in and led a large number of risk and safety related projects. His research covers foundational issues in risk analysis, risk analysis methods, reliability theory and maintenance optimisa-tion, decision support tools, risk acceptance and risk management.
LYNNE BILSTON, NEUROSCIENCE RESEARCH AUSTRALIA & UNIVERSITY OF NEW SOUTH WALES, AUSTRALIASenior Principal Research Fellow at Neuroscience Research Australia and Professor in UNSW Medi-cine, she is leading research on biomechanics of the nervous system - brain and spinal cord, and also other soft organs and muscles. Basic research includes developing novel imaging methods for understan-ding mechanical properties of body tissues, models of spinal cord injury, and sleep apnoea biomechanics. Her research includes studying injuries in car crashes, particularly to children and rear seat occupants. She is a member of the World Council of Biomechanics.
ALBERTO BROGGI, UNIVERSITY OF PARMA, ITALYFull Professor at the University of Parma, he has been the founder and leader of the artificial vision research group VisLab. His research themes focus on artificial vision techniques in automotive applica-tions: daytime and infrared vision for human shape localization and detection, obstacle, lane, and vehicle detection. Author of more than 150 publications, he is the principal investigator of many projects involving autonomous vehicles, including 2 ERC grants. He was Founding Editor of the Newsletter of the IEEE Intelli-gent Transportation Systems, acted as Editor in Chief of the IEEE Transactions on Intelligent Transportation Systems, and served the same Society as President from 2010 to 2011. He is the co-chair and co-founder of the Technical Committee on IntelligentTransporta-tion Systems of the IEEE Robotics and Automation Society.
MO JAMSHIDI, UNIVERSITY OF TEXAS, SAN ANTONIO, USAFellow of 7 academies and professional societies, he is Lutcher Brown Endowed Chaired Professor of the University of Texas Systems, working at the University of Texas, San Antonio, TX, USA. and member of the International Scientific Committee of the Labex MS2T. He is a worldleading researcher in large-scale sys-tems, System of systems, Computational intelligence and Mobile robotics.
66
Appendix 2 - International Advisory Committee members (IAC)

67Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
DOMINIQUE LUZEAUX, DGA, MINISTRY OF DEFENSE, FRANCEDirector of Land Systems acquisition at Direction Générale de l’Armement, French Defense Ministry, Chairman of AFIS (acting French chapter of INCOSE). He was formerly Director of the Center for Informa-tion Systems, in charge of providing IT infrastructure and services. In the past he has also been leading programs dealing with simulation-based acquisition and system engineering tools & techniques. He has been Research Fellow at the University of California at Berkely, and graduated from Ecole Polytechnique and ENSTA. He holds a PhD degree and an habilitation thesis, teaches robotics and systems engineering at graduate level, and is the author of several books on system-of-systems engineering.
ROMAN SLOWINSKI, POZNAN UNIVERSITY OF TECHNOLOGY, POLANDProfessor and Founding Head of the Laboratory of Intelligent Decision Support Systems at the Poznan University of Technology, Poland. Academician, pre-sident of the Poznan Branch of the Polish Academy of Sciences. His area of expertise includes multiple criteria decision aiding, preference learning, rough set theory and granular computing. Laureate of the EURO Gold Medal (1991), the Edgeworth-Pareto Award (1997) and the 2005 Prize of the Foundation for Polish Science. Doctor Honoris Causa of Polytech’Mons (2000), University Paris Dauphine (2001) and Techni-cal University of Crete (2008). Since 1999, Co-ordi-nating Editor of the European Journal of Operational Research. Senior Member of IEEE.
KEITH WORDEN, UNIVERSITY OF SHEFFIELD, U. K. Keith is based in the Department of Mechanical En-gineering at the University of Sheffield, UK, and has over 25 years of experience of research in structural dynamics with an emphasis on signal processing and interpretation. He has held a UK EPSRC Advanced Fellowship on A Holistic Approach to Damage Iden-tification and currently holds an EPSRC Established Career Fellowship on Disease Surveillance in Systems and Structures.He is the author or co-author of three books and over 500 journal and conference papers. He is a member of the EPSRC peer review college and sits on the editorial board of two international journals. In the past he has been coordinator of the EU COST F3 action on Structural Dynamics working group WG2 on Structural Health Monitoring (SHM), and was an initiator of the EPSRC network on Structural Integrity and Damage Assessment (SIDANET). Keith was also PI on the recently-completed project Smart Sensing for Structural Health Monitoring (S3HM) which was coordinated by the European Research Council and brought together leading European researchers in the field of vibration-based SHM. Keith is a Fellow of the Institute of Physics, the Institute of Mathematics and its Applications, and the Institution of Mechanical Engineers. He was jointly awarded Person of the Year 2004 by the International Journal of SHM for his work on structural health monitoring and will be given the SEM D.J. DeMichele Award 2014 for contributions to modal analysis technology.
67

68 Labex MS2T Activity Report 2013-2014
Appendix 3 - PhDs and Post-docs in progress
Project Sheet - PhD
Name: HOANG Tuan NhaStatus: PhD StudentSupervisor(s) of the thesis: Marie Christine Ho Ba Tho, Thierry Denoeux, Tien Tuan DaoResearch units: BMBI, Heudiasyc
Title: Modeling the uncertainty of biomedical and biomechanics data and its propagation in the diagno-sis models of musculoskeletal system pathologies
Description of the project: The aim of the project is to investigate the modeling of the reliability/incertitude/imprecision of biomedical and biomechanics data (medical images, kinematics/kinetics/EMG data, etc.) and its propagation in the predictive diagnosis models of the disorders of mus-culoskeletal systems. These diagnosis models will be based on multimodal and multidimensional patient data (3D medical imaging, mechanical data, clinical data, etc.).More advanced data mining techniques/methods combined with belief function theory to solve will be proposed. The focus will be taken in the adaptation of these methods for new potential biomechanics appli-cations as well as in the improvement of mathematical framework related to multimodal and multidimensio-nal data.Furthermore, the conflict management of different sources/systems of measurements which are more or less reliable will be taken into consideration to improve the accuracy and the precision of predictive diagnosis model.
Keywords: Uncertainty modeling, uncertainty propagation, biomedical and biomechanics data, musculoskeletal system pathologies
State of progress, results:The literature-based data have been collected to es-tablish an uncertainty space, which represents fused data from multiple sources, of morphological, mecha-nical, and movement analysis properties of the muscu-loskeletal system from multiple sources (i.e. research papers from Science Direct and Pubmed). After that, a new clustering method (US-ECM) is proposed for integrating fused data from multiple sources in form of a multidimensional uncertainty space (US).
Figure 1 Conceptual model of our clustering method with fused data from multiple sources
The performance of our US-ECM was compared to that of ECM using Davies–Bouldin (DB) index metric. Sensitivity study was performed on various ranges of uncertainty space as well as on the type of biome-chanical property. As a case study, the clustering ap-proach was performed on the children with cerebral palsy data.A new index extended from the Silhouette index was also defined and implemented to quantify the cluste-ring performance of our US-ECM method. Such an index would be of great interest to evaluate quantitati-vely and qualitatively the performance of an evidential clustering model of a clinical decision support system.Reliability of biomechanical data was evaluated by a fusion approach of expert opinion. Reliability criteria of a data source (ie scientific paper published) focus on the technique used, the acquisition protocol and measurement and the number of data. A system of questionnaires was developed to collect expert opi-nion. Then, the theory of belief functions has been applied to merge these opinions to establish a confi-dence level for each data source.
Further work, schedule (for PhD students): (± 10-15 lines)The analysis of expert opinion will include or exclude data sources according to their levels of reliability. Then the cluster model (US-ECM) developed will be applied to a new database to assess the impact of data reliability on diagnostic performance. The cam-paign to collect opinions of experts (10 experts in biomechanics) is underway.
List of publications related to the thesis:[1] T.N. Hoang, T.T. Dao, T. Denoeux, M.C Ho Ba Tho. A Clustering Model for the Musculoskeletal Disorders with Fused Data from Multiple Sources. 5th Interna-tional Conference on Computational Bioengineering, ICCB2013 Leuven, Belgium September 11-13.
[2] T.N. Hoang, T.T. Dao, T. Denoeux, M.C Ho Ba Tho. Belief-based Silhouette Index for Performance Analy-sis of Evidential Clustering Model for Clinical Decision
68

69Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Support System. 1st International workshop MS2T. 5-6 September, Compiegne, France.
[3] T.N. Hoang, T.T. Dao, T. Denoeux, M.C Ho Ba Tho. Clustering of children with cerebral palsy with prior biomechanical knowledge fused from multiple data sources. International Journal of Approximate Reaso-ning. Submitted.
Project Sheet - PhD
Name: QIU SiqiStatus: PhD StudentSupervisor(s) of the thesis: Mohamed Sallak, Walter SchönResearch unit: Heudiasyc
Title: Reliable design methodology of Systems of Systems in the presence of uncertainty: Application to transport systems
Description of the project:The Systems of Systems (SoS) are large systems whose components are themselves systems which interact to realize some functions, and for which the malfunction of a single system can have some serious consequences on the performance of the whole SoS. So it’s important, on one hand, that the design of these SoSs considers the dependability requirements and particularly their reliability and their availability when they are asked, and on the other hand that it en-sures, by quantitative analyses, the respect of these requirements.
The objective of this thesis is to propose a reliable design methodology, which focuses on the inherent difficulties in the study of the dependability of such systems. It will firstly propose a dysfunctional model of the global SoS integrating the material aspects, the network aspects and the human factor. Then, it will take different kinds of uncertainties into account quantitatively. Concerning the application part, the subject will be based on the reliable design of a fleet of trains by considering in particular the train-train communication systems and the ground-train sys-tems already being used.
Keywords:System-of-Systems, Reliability, Availability, ERTMS Level 2, Epistemic Uncertainties, Statecharts, Belief functions theory, Human factors, Valuation-Based System.
State of progress, results:We have proposed the definition, the modeling method and the performance evaluation of the SoS. The ERTMS Level 2 signalling system is considered
as an SoS, in order to study its emergent properties. This SoS is modeled with Statecharts. In our state-chart model, human factors and network failures are analyzed quantitatively. When modeling systems with Statecharts, two kinds of epistemic uncertainties may exist in the model: epistemic parametric uncertainties and epistemic state uncertainties. A methodology based on two-phase Monte Carlo simulation is pro-posed to evaluate the availability interval of the sys-tem taking epistemic parametric uncertainties into ac-count. Two approaches are proposed to evaluate the availability of systems taking state uncertainty into ac-count: the analytic method based on belief functions theory and linear equations to obtain belief masses of component states, and the simulation method based on belief functions theory and Statecharts.
Though Statecharts are dynamic and suitable to mo-del dynamic behaviors of the SoS, they can’t handle the parametric uncertainties represented by belief masses. This makes us to find another tool which could deal with all kinds of uncertainties. We have pro-ved the feasibility of Valuation-based Systems (VBS) method. We have modeled the ERTMS Level 2 in VBS and analyzed uncertainties using belief functions theory. A dynamic VBS approach is also proposed to evaluate the performance over time.
A protocol is developed to evaluate the human er-ror probability on the railway platform RCCS (Route Control Centre System). Five experimental subjects have participated in the experiment. The experimen-tal result is analyzed by a classical probability method and the VBS method.
Further work, schedule:The research part is finished. The thesis defense is scheduled to be in December. Now I am writing the thesis and preparing some journal papers.
List of publications related to the thesis:[1] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi (2014a), “Availability assessment of railway signalling systems with uncertainty analysis using Statecharts”. Simula-tion Modelling Practice and Theory 47 (2014) 1–18.
[2] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi (2014b), “Modeling of ERTMS Level 2 as an SoS and Evalua-tion of its Dependability Parameters”, IEEE Systems journal, To appear in 2014.
[3] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi, “Mo-délisation et évaluation de la disponibilité d’un sys-tème de signalisation ferroviaire ERTMS niveau 2”. In 10ème Congrès International Pluridisciplinaire Qua-lité et Sûreté de Fonctionnement, QUALITA’2013. pp. 451-458. Compiègne, France. March 2013.
69

70 Labex MS2T Activity Report 2013-2014
[4] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi, “Epis-temic parametric uncertainties in availability assess-ment of a Railway Signalling System using Monte Carlo simulation”. In European Safety and Reliability Conference, ESREL 2013. pp. 3003-3011. Amster-dam, Netherland, October 2013.
[5] S. Qiu, F. Aguirre, F. Vanderhaegen, W. Schön, M. Sallak, R. Nedjemi, “On the efficiency of learning and cooperation processes in ADAS”. In 10th Human-Ma-chine Systems workshop, Berlin, October, 2013.
[6] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi, “Dyna-mic reliability modeling using Valuation-Based Sys-tem”. In 19th World Congress of the International Federation of Automatic Control, IFAC 2014. Cape Town, South Africa. August 2014.
[7] S. Qiu, M. Sallak, W. Schön, and Z. Cherfi, “Modé-lisation et vérification de propriétés de sécurité d’une infrastructure ferroviaire à l’aide des Statecharts”. In 19ème congrès de maîtrise des risques et sûreté de fonctionnement, Lambda Mu 19. Dijon, France. October 2014.
Project Sheet - PhD
Name: RAULT Tifenn Status: PhD StudentSupervisor(s) of the thesis: Abdelmadjid Bouabdallah, Frédéric MarinResearch units: Heudiasyc, BMBI
Title: Energy saving in wireless sensor networks
Description of the project:The purpose of this project is to develop original solutions to the energy problem in wireless sensor networks (WSN) which is an important component of systems of systems. Indeed, the design of sustainable wireless sensor networks is a very challenging issue. On one hand, energy constrained sensors are expec-ted to run autonomously for long periods. However, it may be cost-prohibitive to replace exhausted bat-teries or even impossible in hostile environment. On the other hand, unlike other networks, WSN are de-signed for specific applications. These applications range from small size healthcare surveillance systems to large scale environment monitoring. Thus, an ope-rational network is required to satisfy a set of requi-rements that differs from one application to another. The depletion of one component may compromise the operation of the whole network.
Keywords:Wireless sensor networks, energy consumption, life-time optimization, application requirements, context-awareness, activity recognition, energy efficient architecture, mobility, e-health
State of progress, results:We have surveyed the existing energy-efficient solu-tions proposed in literature, taking into consideration the specificities of the applications. We have proposed a new Linear Programming model for data collection in WSN equipped with a mobile base station. We have developed distributed algo-rithms based on the observations derived from our numerical results. We have proposed a solution that optimizes the de-ployment of mobile chargers in the networks, so the chargers can satisfy the energy demand of every node, while the energy is transmitted wirelessly from chargers to node and between nodes. In addition, we have reviewed existing energy-efficient architectures developed for activity recognition. We have proposed a generic energy-efficient architecture using wearable sensors for human activity recogni-tion applications. We have also proposed an efficient solution that selects the most suitable communica-tion technology at the sensor depending on the envi-ronment opportunities. This solution saves energy at both the sensor and the base station. Further ork, schedule
We are finalizing a survey paper that study energy-effi-cient architectures using wearable sensors for human activity recognition applications. We are developing a proof-of-concept of our energy-efficient architecture for activity recognition applications based on wea-rable sensor networks.
List of publications related to the thesis:T. Rault, A. Bouabdallah, Y. Challal. Energy efficien-cy in wireless sensor networks : A top-down survey. Computer Networks, pp 104-122, 67:4, 2014.T. Rault, A. Bouabdallah, Y. Challal, F. Marin. Context-aware energy-efficient wireless sensor architecture for activity recognition. WIP PerCom, Budapest, Hunga-ry. pp 1-4, 2014.T. Rault, A. Bouabdallah, Y. Challal. Multi-hop wireless charging optimization in Low-Power Networks. IEEE GLOBECOM, Atlanta, USA, 2013.T. Rault, A. Bouabdallah, Y. Challal. WSN Lifetime Op-timization through Controlled Sink Mobility and Pac-ket Buffering. IEEE GIIS, Trento, Italy, 2013.
70

71Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Project Sheet - PhD
Name: SEVENIE Benjamin Status: PhD Student Supervisor(s) of the thesis: Anne-Virginie Salsac, Pierre Villon Research units: BMBI, Heudiasyc Title: Modeling the flow of a capsule through a capillary network Description of the project: Capsules, which are droplets enclosed within a thin deformable membrane, are naturally present in the human body (e.g. red blood cells). They are also lar-gely used in industry. Among all the applications, one can highlight their use as vectors for drug targeted therapies as well as chemoembolization. If these new techniques are already used on patients, they remain empirical. There is the need for numerical models to be developed to predict the flow and behavior of a capsule suspension once injected, and the repartition of the particles in the microcirculation. Such a pro-blem is complex to solve: the motion of each capsule results from the strong fluid-structure interactions (between the internal and external fluid and the defor-mable membrane) and from the interactions between the neighboring capsules. The objective of the project is to create a reduced model of a capsule flowing in a bifurcation considering the case of a dilute suspen-sion. Microfluidic experiments will be conducted in a symmetric Y-shaped bifurcation: dilute suspensions of capsules will be flowed in a bifurcated microchan-nel made with a square cross-section. We will acquire the deformation of a capsule as it passes through the bifurcation: the evolution of the capsule cross-section will be determined using image processing tools. A proper orthogonal decomposition (POD) technique will be applied on the time-evolution of the capsule profile. The POD technique will be validated in the case of a straight square-section channel, for which a full numerical simulation model of the fluid structure interactions exists (Hu et al. 2012). Keywords: Capsules, bifurcated channel, Proper Orthogonal De-composition, fluid-structure interaction State of progress, results: An experiment has been set up to study the deforma-tion of a dilute capsule suspension flowing in a bifurcation in order to obtain the library of capsule de-formed shapes. Microfluidic Y-shaped channels were produced and characterized. The microcapsules, which consisted of a protein-reticulated membrane, were flowed in the microchannels under a flow rate- or pressure-controlled flow. The capsule shapes were recorded using a high-speed camera (figure 1a). An
automatic contour detection is being developed to ex-tract the profiles from the experimental images (figure 1b). It uses a special background subtraction algo-rithm, as classical image processing tools are ineffec-tive in this case: the images have a too low contrast to allow membrane detection. The algorithm learns which image pixels belong to the fixed environment (background), which allows to detect the moving par-ticles even with low contrast. The algorithm has so far revealed to be quite efficient and more precise than other methods previously tested, but the method has to be tuned to be reliable in a large range of cases. We have identified the capsule mechanical behavior from the microfluidic experiments in order to relate the measured deformation to the capsule mechanical pro-perties. We have applied the microfluidic technique that we had developed during the first year of Benja-min Sévénié’s PhD (Hu et al. PRE 2013): the mecha-nical properties are deduced from the comparison of the experimental deformed profile to numerical pre-dictions using an inverse method approach (figure 1b). An issue we have encountered is the lack of squareness of the microchannels associated with the inherent imprecision of the fabrication technique: the photolithography procedure can only guarantee a 5% precision on the geometry. We have run a numerical study in order to see the influence of the non-squa-reness on the robustness of the identification tech-nique. Numerical simulations of a capsule flowing in slightly rectangular channels have been run. We have esta-blished that a 5% deviation from squareness does not significantly impact the capsule deformation. Any deviation above affects the precision of the method.
Figure 1 : (a) Image du montage expérimental.(b) Illustration du principe de l’analye inverse.
71

72 Labex MS2T Activity Report 2013-2014
Further work, schedule: The POD method will be implemented from the expe-rimental database of capsule deformed profiles. We will determine how many modes are necessary to describe the deformation of a capsule with a chosen error. We will test the ability of the method to fit any experimental profile that is not in the initial database. The reduced model will be validated applying the POD technique on 3D numerical capsules moving into a square straight channel. It will indeed be pos-sible to compare the results with exact simulations. The objective is then to replace the FEM solving of membrane mechanics in the existing fluid-structure simulation code by the equivalent reduced model and implement the coupling between it and the fluid sol-ving. This will be the proof of concept for applying to a bifurcated channel.
Project Sheet - PhD
Name: SAIF OsamahStatus: PhD StudentSupervisor(s) of the thesis: Isabelle FantoniResearch unit: Heudiasyc
Title: Reactive navigation of a fleet of UAVs in interaction
Description of the project:Applications of autonomous quadrotors in the real life are increasing rapidly. Surveillance and security are the most popular applications of Unmanned Aerial Vehicles (UAVs). Nowadays, researchers and scien-tists focus on the deployment of large areas inspec-tion and surveillance by multi-UAVs missions. Multi-UAVs flocking is one of the recent and most important fields in the system of systems engineering. This thesis intends to develop a real-time multi-quadrotors system of systems.The autonomous flight formation control has recent-ly received a high attention from researchers. Most works in this field are theoretical with real-time indoor applications in some of them, with limited number of individuals in the formation. Several techniques are proposed to achieve the multi-UAVs formation control, such as, leader-follower and virtual leader structures. However, these techniques present different draw-backs that awaken their robustness and scalability. The behavior-based control structure is one of the most robust, scalable and appropriate techniques in the system of systems field. This technique is not lar-gely tested on a real-time application. For these rea-sons, the objective of this project is to use this tech-nique by developing the necessary algorithms, which
will be applied on the ROBOTEX platform. Moreover, we intend at the end of this thesis to have a multi-quadrotors platform that can navigate in a collective motion and that can avoid obstacles, in indoor and outdoor environments. Keywords: (± 1-2 lines)Flight formation control, Flocking, Behavior-based control, Unmanned aerial vehicles, Navigation, Obs-tacles avoidance
State of progress, results:The objective of this thesis is to design algorithms and techniques to perform a real-time distributed multi-UAVs flight formation control. In the beginning, we have started by literature review of existing works. As a result, theoretical works have been classified and organized. This has allowed us to choose the most useful techniques for our work that we can start with. Then, algorithms have been proposed and simulated on linear and nonlinear models of quadrotors. For the simulation we have used MATLAB and a multi-UAVs simulator developed in the Heudiasyc laboratory. In these algorithms, we have focused on the aggrega-tion and the navigation problem where a flock of mul-ti-UAVs is auto-organized to ensure a mission.Unlike the proposed strategies in literature, our al-gorithms decrease the computational cost and the complexity of the control law by proposing a unique control law independent of the number of agents, and dependent only on the reference. We proposed also a new behavior which deals with the aggregation of agents from a global point of view. During the second year, we have implemented the algorithms, developed in the first year, on a real-time platform of four quadrotors. The experiments were performed by using a system of motion capture “Opti-track”. Figure 1 shows a snapshot of the aggregation scenario using these algorithms. We then developed algorithms based on the consensus theorem. These algorithms have shown more robust behavior against disturbances in real-time indoor applications. Figure 2 shows four quadrotors in a navigation stage toward a predefined destination point, by using these algo-rithms. Articles about these algorithms are currently being written.
Figure 1. Aggregation scenario of 4 quadrotors
72

73Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Figure 2. Navigation scenario of 4 quadrotors
Further work, schedule:As aforementioned in the description of the project, the objective is to manage to perform a real-time application of a multi-quadrotors formation control. In the previous work and results we have partially achieved the objective of this thesis. Indeed, real-time experiments were performed in a perfect localization environment. The relative positions of quadrirotors are obtained through fixed and centralized system “Opti-track”, which is a major drawback if we want to per-form experiments in an unknown indoor or outdoor environment. Therefore, the next step is to embed, on each quadrotor, sensors capable of providing pro-prioceptive and exteroceptive information. Examples of such sensors are a GPS, a camera or a laser range-finder. The achievement of these objectives requires a deep research as well as new techniques to be pro-posed. In the next months, we will develop an expe-riment using embedded cameras in order to extract relative positions between quadrotors in platooning.
List of publications related to the thesis:[1] O. Saif and I. Fantoni. Commande LQR d’une flotte de multiples vehicules aériens. JD /JNMACS, Strasbourg, France, July 2013.[2] O. Saif and I. Fantoni and Arturo Zavala-Rio. Floc-king of Multiple Unmanned Aerial Vehicles by LQR Control. ICUAS, Orlando, USA, May 2014.[3] O. Saif, Z. Hou, I. Fantoni, G. Sanahuja. Simulateur de flotte de drones. 4èmes Journées Démonstrateurs en Automatique, Angers, France, Juin 2013.
Project Sheet - PhD
Name: TOUATI LyesStatus: PhD StudentSupervisor(s) of the thesis: Yacine ChallalResearch unit: Heudiasyc
Title: Internet of Things security: towards a robust interaction of Systems of Systems
Description of the project:The thesis is part of the project activities of the Labo-ratory of Excellence (LABEX) at the University of Tech-nology of Compiègne (UTC) in France on the Control of Technological Systems of Systems (MS2T) (www.utc.fr/labexms2t).Internet of Things (IoT) is an enabling technology for Cyber-Physical Systems or Systems of Systems. In-deed, Internet is evolving from a network of personal computers and servers toward a huge network inter-connecting billions of smart communicating objects. These objects will be integrated into complex sys-tems and use sensors and actuators to observe and interact with their physical environment, and hence allowing interaction among autonomous systems.This thesis aims to develop a new global approach for IoT security that takes into consideration the involve-ment of smart communicating objects in the control of complex systems and the ubiquitous nature of IoT. Security requirements in System of Systems interac-tions will depend on the context that evolves in space and time. Therefore, security policy definition and en-forcement should be adaptive and “context-aware”. This will allow the development of efficient security solutions for robust interaction of smart objects with persons, the technological ecosystem and control processes, while providing autonomy for objects to safely perceive and act on their environment.
Keywords: Internet of Things, Security, system of systems
State of progress, results:We carried out IoT security state-of-the-art literature review. We identified many security challenges in IoT, such as: privacy, resource-efficient access control and authentication, scalable key management, trust management, etc. Our early thesis focus relates to two issues:The first one aims to tackle the resource constraints of the IoT entities while implementing the Ciphertext Policy-Attribute-Based Encryption (CP-ABE) mecha-nism to ensure fine grained access control in IoT. It is well-known that CP-ABE is complex and it generates a considerable overhead that cannot be supported by small objects. The main idea of this first contribu-tion is to leverage network heterogeneity for fair load repartition and optimized CP-ABE execution through
73
74 Labex MS2T Activity Report 2013-2014
network components cooperation. Namely, we pro-pose is to offload the burden of some calculations from the highly resource-constrained entities to more powerful devices situated in the neighborhood. This is achieved by delegating the costly operations during the encryption primitive (exponentiations) to trusted assistant nodes. This first contribution has led to a communication in an international conference [1].
We are working also on defining a scalable attribute key management mechanism for CP-ABE in an IoT en-vironment. The solution aims to optimize the rekeying overhead due to network dynamics. We introduced a novel technique allowing reducing rekeying messages thanks to batch-based rekeying and securing pre-cal-culation of key material given a schedule of attributes validity. A paper describing this solution is under preparation.
Further work, schedule:As perspectives, we plan to implement our distributed version of CP-ABE in an Internet of Things simulator, like Contiki-OS, to effectively measure the energy saving comparing to the standard version.We consider an extrapolation of the concept of access control in Internet of Things to control sensitive activity context. This will require modeling of the process of recognition of activities which seems to be a difficult task given the number of states and context properties in which may evolve IoT objects. It might be necessary to restrict the size of the problem by considering a particular field of application.
List of publications related to the thesis:[1] Lyes TOUATI, Yacine CHALLAL and Abdelmadjid BOUABDALLAH, “C-CP-ABE: Cooperative Cipher-text Policy Attribute-Based Encryption for the Internet of Things” (to appear) 2014.
Project Sheet - PhD
Name: SAHLI AbderrahimStatus: PhD StudentSupervisor(s) of the thesis: Jacques Carlier and Aziz MoukrimResearch unit: Heudiasyc
Title: Scheduling Problems with Production and Consumption of Resources
Description of the project:Most of the papers on scheduling problems consider activities using renewable resources in the sense that activities require some quantities of resources at their beginning and give them back at their end. It is the case for instance of the Resource Constrained Pro-ject Scheduling Problem (RCPSP) where activities are
also submitted to precedence constraints. Renewable resources can model manpower or machines. In this thesis we work on the Generalized Resource-Constrained Project Scheduling Problem (GRCPSP) which is a generalization of the RCPSP. In GRCPSP, activities are replaced by events, the resource is sto-rage resource and an event can produce or consume resources. We speak of storage resources because when a quantity of resources is produced it is stocked and when it is consumed it is destocked.Keywords: GRCPSP, lower bound, JPPS, shifting algorithm.
State of progress, results:We have introduced three new lower bounds for this problem. The first one is an adaptation of JPPS (Jack-son’s Pseudo-Preemptive Schedule) which was deve-loped to compute a lower bound for the Cumulative Scheduling Problem (CuSP). We can calculate this lower bound as follows. For an instance of GRCPSP, we associate an instance of the transportation pro-blem. Then we solve it and associate its solution with an instance of Generalized Cumulative Scheduling Problem (GCuSP). At last, we apply extended JPPS to obtain a lower bound for the instance of GCuSP and take it as the lower bound of GRCPSP.The second lower bound is based on the shifting al-gorithm which was developed to solve the Financing Problem. We can compute it as follows. First we make a relaxation from GRCPSP to the Financing Problem by setting the date of production events at their ear-liest start times, and the date of consumption events at their latest times. Then, we apply the shifting algo-rithm on the corresponding instance. At last, we take the makespan as the lower bound of GRCPSP.The last lower bound is a destructive bound using Network Flows. To compute this bound, first we fix the value of Cmax. Then we generate an instance of network flow problem. If it doesn’t admit a solution, Cmax + 1 is a lower bound for GRCPSP.We have also proposed MILP formulations for the GR-CPSP based on the concept of event.
Further work, schedule:In the next year, we aim to test our solutions on the instances generated by Neumann and Schwindt. Then we build a branch-and-bound method to solve the problem. We also plan to generate a new bench-mark.Another perspective is to solve the optimization pro-blem when the precedence graph is series-parallel by dynamic programming. The last perspective is to solve the GRCPSP by constraint programming.
74
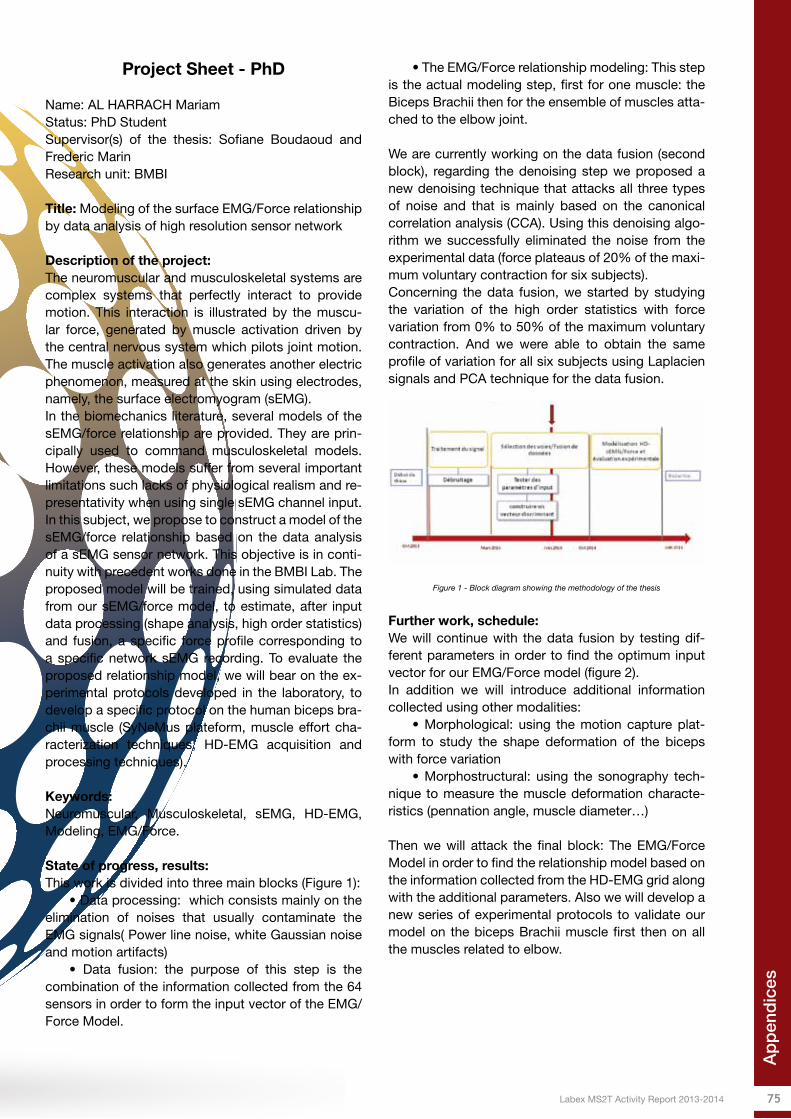
75Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Project Sheet - PhD
Name: AL HARRACH MariamStatus: PhD Student Supervisor(s) of the thesis: Sofiane Boudaoud and Frederic MarinResearch unit: BMBI
Title: Modeling of the surface EMG/Force relationship by data analysis of high resolution sensor network
Description of the project:The neuromuscular and musculoskeletal systems are complex systems that perfectly interact to provide motion. This interaction is illustrated by the muscu-lar force, generated by muscle activation driven by the central nervous system which pilots joint motion. The muscle activation also generates another electric phenomenon, measured at the skin using electrodes, namely, the surface electromyogram (sEMG).In the biomechanics literature, several models of the sEMG/force relationship are provided. They are prin-cipally used to command musculoskeletal models. However, these models suffer from several important limitations such lacks of physiological realism and re-presentativity when using single sEMG channel input.In this subject, we propose to construct a model of the sEMG/force relationship based on the data analysis of a sEMG sensor network. This objective is in conti-nuity with precedent works done in the BMBI Lab. The proposed model will be trained, using simulated data from our sEMG/force model, to estimate, after input data processing (shape analysis, high order statistics) and fusion, a specific force profile corresponding to a specific network sEMG recording. To evaluate the proposed relationship model, we will bear on the ex-perimental protocols developed in the laboratory, to develop a specific protocol on the human biceps bra-chii muscle (SyNeMus plateform, muscle effort cha-racterization techniques, HD-EMG acquisition and processing techniques).
Keywords: Neuromuscular, Musculoskeletal, sEMG, HD-EMG, Modeling, EMG/Force.
State of progress, results:This work is divided into three main blocks (Figure 1): •Dataprocessing:whichconsistsmainlyontheelimination of noises that usually contaminate the EMG signals( Power line noise, white Gaussian noise and motion artifacts) • Data fusion: the purpose of this step is thecombination of the information collected from the 64 sensors in order to form the input vector of the EMG/Force Model.
•TheEMG/Forcerelationshipmodeling:Thisstepis the actual modeling step, first for one muscle: the Biceps Brachii then for the ensemble of muscles atta-ched to the elbow joint.
We are currently working on the data fusion (second block), regarding the denoising step we proposed a new denoising technique that attacks all three types of noise and that is mainly based on the canonical correlation analysis (CCA). Using this denoising algo-rithm we successfully eliminated the noise from the experimental data (force plateaus of 20% of the maxi-mum voluntary contraction for six subjects).Concerning the data fusion, we started by studying the variation of the high order statistics with force variation from 0% to 50% of the maximum voluntary contraction. And we were able to obtain the same profile of variation for all six subjects using Laplacien signals and PCA technique for the data fusion.
Figure 1 - Block diagram showing the methodology of the thesis
Further work, schedule:We will continue with the data fusion by testing dif-ferent parameters in order to find the optimum input vector for our EMG/Force model (figure 2).In addition we will introduce additional information collected using other modalities: •Morphological: using themotioncaptureplat-form to study the shape deformation of the biceps with force variation •Morphostructural: using the sonography tech-nique to measure the muscle deformation characte-ristics (pennation angle, muscle diameter…)
Then we will attack the final block: The EMG/Force Model in order to find the relationship model based on the information collected from the HD-EMG grid along with the additional parameters. Also we will develop a new series of experimental protocols to validate our model on the biceps Brachii muscle first then on all the muscles related to elbow.
75

76 Labex MS2T Activity Report 2013-2014
Figure 2: Gantt diagram
List of publications related to the thesis: • M. Al Harrach, F. S. Ayachi, S. Boudaoud, J. Laforet, and F. Marin “Sensitivity evaluation of HOS parameters by data fusion from HD-sEMG grid,” in 2013 2nd International Conference on Advances in Biomedical Engineering (ICABME), 2013, pp. 97–100. •S.Allouch,M.AlHarrach,S.Boudaoud,J.Lafo-ret, F. S Ayachi, and R. Younes “Muscle Force Estima-tion Using Data Fusion from “High-Density SEMG Grid ”, in 2013 2nd International Conference on Advances in Biomedical Engineering (ICABME), 2013,pp. 195-198. • M. Al Harrach, S. Boudaoud, D. Gamet, J.F.Grosset, and F. Marin. “Evaluation of High Order Sta-tistic Trends from HD-sEMG recordings during Ramp Exercise” 36th IEEE EMBS Conf., Chicago, U.S.A, 2014. •S.Boudaoud,H.Rix,M.ALHarrach,andF.Ma-rin. “Robust Functional Statistics applied to Probabi-lity Density Function Shape screening of sEMG data” 36th IEEE EMBS Conf., Chicago, U.S.A, 2014. • M.Al Harrach, S. Boudaoud, M.Hassan, F.SAyachi, D.Gamet, JF Grosset and F. Marin “Denoi-sing of HD-EMG Signals at Low Contraction Levels Using Canonical Correlation Analysis”, Journal IEEE
TBME (under submission).
Project Sheet - PhD
Name: CALLEBERT LucileStatus: PhD StudentSupervisor(s) of the thesis: Domitile Lourdeaux, Jean Paul BarthesResearch unit : HeudiasycCo-funding: Labex MS2T, DGA
Title: Socio-cognitive Autonomous Virtual Characters: towards Collective Intelligence
Description of the project:As the organizations today grow more and more com-plex, training to collective decision making is essen-tial. Our objective is to populate a virtual environment with autonomous characters working in teams to tend towards collective intelligence.The recent improvement of virtual reality techniques allows complex environments for decision making
support and training to be designed. Besides, nume-rous serious games exist in a wide range of domains such as public health, education or business: for example 3D Virtual Operating Room enables collective training for health care professionals in virtual opera-ting rooms. However, those systems often focus on work procedures or technical gestures learning, and the focus is on the individual whether on the team.The challenge is now to be able to use virtual reality to train the development of not only technical but also social skills, where the human relationships, collective aspects and interpersonal interactions have a great importance. Indeed, as organizations grow more and more complex, individuals rarely face situations alone, but rather surrounded by a team with whom they must take common decisions: it is in this context that the notion of collective intelligence must be considered.
Keywords:Multi-Agent System, Autonomous Agents, Collective Intelligence, Team Cognition.
State of progress, results:This first year was dedicated to the realization of the state of the art and to the elaboration of a first model proposition.We identified the individual characteristics needed to model the decision making process of our agents: •Emotions:emotionsarepsychologicalstatsthatlast for a few seconds and that influence on our beha-viours. We will use the Cognitive Evaluation Theory to derive an emotional state for a character given an event. •Personality:staticanduniqueforacharacter,itis commonly admitted that personality influence our behaviours and emotions. In the field of affective com-puting, there is a consensus on the OCEAN model (5 dimension vector that describe 5 personality traits).•Identity:composedofseveraldimensions(suchasgoals and values for example), identity is not unique: depending on the context, the same person can express different identities. •Collectiveorientation:collectiveorientationisanindicator derived from personality that can be used to predict the performance of an individual in team set-tings. •Socialrole:asocialroleiscomposedofasetofrights and duties corresponding to a social position. Each individual can have several social roles but will choose one of them to express at a time.Besides, group effects must be taken into account: •Social facilitationcorresponds to the fact thatthe simple present of someone else can create a arou-sal that is going to facilitate personal activity. •Social loafingcorresponds to theoppositeef-fect: in team settings, individuals tend to let the others work harder than they do.
76

77Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Further work, schedule:July-Oct 2014: working at Northeastern University (Boston) on the relation of interpersonal relationships and non verbal behaviours. This stay at Northeastern University takes place in the context of the establish-ment of a collaboration between the research teams of Domitile Lourdaux (Heudiasyc – UTC) and Stacy Marsella (College of Computer Science and Informa-tion – Northeastern University).Oct-Dec 2014: working on the groups’ effects on the individual’s cognition and decision making processes, state of the art deepening. Jan-Mar 2015: formalization of the proposition.Mar-July 2015: operationalization of the model.July 2015 – Feb 2016: operationalization, tests, vali-dation.Feb – Sept 2016: redaction.
Project Sheet - PhD
Name: PUTHIYA PARAMBATH ShameemStatus: PhD StudentSupervisor(s) of the thesis: Nicolas Usunier and Yves GrandvaletResearch unit: HeudiasycCo-funding: Labex MS2T, The Picardy Region
Title: New methods for multi-objective learning
Description of the project:Currently available machine learning algorithms are designed in a risk minimization framework, where the risk is defined as the expectation of a task-dependent cost function on the data distribution. This type of problem definition will result in a optimizing a scalar objective function. But most of the practical machine learning problems are intrinsically multi-objective. Model selection problem (model complexity and ac-curacy), performance indicator optimization problems (precision and recall), and recommender systems (di-versity and complementarity) are some examples of multi-objective problems.In this PhD we study and develop new approaches to develop methods to optimize multi-objective loss functions. The starting point of the PhD subject is that the principle of minimizing a single real-valued cost function which (1) does not give sufficient degrees of freedom to specify all aspects of the performance of a prediction function or (2) leads to cost functions with a complex structure, which cannot be optimized with usual (e.g. convex optimization) approaches.
State of progress, results:As a starting point we selected the problem of optimi-zing performance indicator, F-score, which is defined as the harmonic mean of precision and recall. F-score is a non-linear non-convex function of true positive rate and false positive rate. We studied currently avai-
lable F-score maximization problem for different no-tions of F-score. In cases, where we can represent the F-score as a linear fractional function of the marginal probabilities of the classes the objective function is a pseudo-linear function. We establish the pseudo-linearity of the F-score and reduce the problem to cost-sensitive learning. We derive the conditions for selecting the costs and finding the Bayes optimal F-score maximizing classifier.
We conducted large-scale experiments on variety of datasets covering binary classification, multi-class classification and multi-label classification problems. The experiment results are inline with our theoretical results.
Further work, schedule:In the future, we would like to extend our framework to cover more complex multi-objective function ari-sing in different sub-domains related to system-of-system research, in addition to covering the abstract level aspects and mathematical properties of such objective functions. We also plan to develop multi-di-mensional graphical plots similar to ROC curve in the multi-objective settings.
List of publications related to the thesis:We submitted one paper to NIPS 2014 (review pen-ding) and planning to write a journal paper elaborating our theoretical and experimental results soon.
Project Sheet - Postdoc
Name: LAFORET JeremyStatus: PostdocSupervisor(s) of the postdoc: S. Boudaoud, S. Des-tercke and C. MarqueResearch unit: BMBI
Title: Sensitivity Analysis and Uncertainty modeling : Application to electromyographic models
Description of the project:Living systems are particularly complex, constitu-ting of interacting sub-systems. To be realistic, the modeling of such systems must follow a multi-scale approach (cell, organ, organism), and also often multi-physics (chemical, electrophysiological, mechanical) (figure 1). Uncertainty is ever present in living systems, either due to heavy variations (inter or intra individual) or to the lack of knowledge on some mechanisms or parameters. This uncertainty is often addressed quite lightly: for example sensitivity analysis, which aims at highlighting the most influential parameters of the stu-died model. On biological models, these studies are performed numerically, due to the complexity of the models. The classical way is to vary each parameter around its nominal value, by a given relative amount
77

78 Labex MS2T Activity Report 2013-2014
(e.g. ±30%), possibly pairwise, without taking into account the physiological range of these parameters. Such methods may make unrealistic hypothesis, and need to be refined. Especially a more realistic model of uncertainty would allow to better identify the role and importance of each parameter. The obtain results could then enhance our understanding of the models and help their simplification.
Figure 1 : Structure of the systems modeled in our SoS approach:Striated skeletal muscle (left), Smooth uterine muscle (right).
Keywords:Modeling uncertainties, electromyogram, sensitivity analysis
State of progress, results:
Figure 2 : Schematic representation of the Python module.
Most of the implementation work was focused on the integration of more sensitivity analysis methods and their testing.For the orthogonal latin hypercube sampling (LHS) methods, two algorithms were implemented (Sun et al. and Cioppa et al.). The second one can be used to generate nearly orthogonal latin hypercubes, lea-ding to less model simulations but at the expense of a more complex generation of the sampling.Another added method is based on Sobol sequences
of quasi-random number for a more uniform sampling of parameter space. LHS methods are coupled with correlation measure-ments of the output (linear and non linear, complete or partial) and Sobol methods can be used to compute sensitivity indexes.To test these new methods which may need tens or hundreds of model simulations, two fast test models have been implemented : Ishigami and Sobol G. func-tions. Both exhibit properties of the real models the library targets: non-linearities, important interactions between parameters.Finally, a graphical interface has been designed to simplify the creation of the xml describing the para-meters ranges.
Further work, schedule:The main step will be the application of these ad-vanced methods to the electromyographic models and processing the vast amount of data it will gene-rate to obtain knowledge over the models and the physiological processes they describe.Within my new position as researcher engineer, most of the related work will be done on the stabilization of the library. Another aspect will be documenting the software and releasing it for public use.Finally, the addition of the frequency based method is also considered, despite its important computational cost, such sensitivity analysis may need a few thou-sand runs to converge.
List of publications related to the thesis:Preliminary global sensitivity analysis of a striated muscle sEMG generation model. Jeremy Laforet, So-fiane Boudaoud, Fouaz Ayachi, Sebastien Destercke, Catherine Marque. Submitted to the 1st international workshop MS2T.
Project Sheet - Postdoc
Name: AL HAJJAR Hani Status: PostdocSupervisor(s) of the postdoc: Frédéric Lamarque Research unit: Roberval Title: Wavelength coding of information transmitted in free-space between systems Description of the project:To date, wireless communications are mainly provi-ded by radio frequency (RF) band across different technologies such as WiFi, Bluetooth, Zigbee… offe-ring a bitrate not exceeding the hundred of Mbps. RF communications suffer from several problems inclu-ding the limited channel bandwidth and then the limited bitrate, the electromagnetic interference
78

79Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
between different transmission system and the va-rious electronic modules that may exist in the commu-nications area. An alternative solution to transmit data in free-space is the optical wireless communications offering a higher bitrate using the low cost component of the fiber communications and the lightning. This project is aimed to develop an original method of information coding based on the use of several wavelengths in the visible and infrared band to trans-mit data. This coding method will use a wavelength or a combination of wavelength to identify the trans-mitter, to identify the data type and also to transmit data. This method increases the security of transmit-ted data. The use of several wavelengths increases also the system bitrate. This communication can be used to transmit data between different type of sys-tems such as sensors, servers, laptops, personal digi-tal assistants (PDAs)… Connected to this main project, array of digital micro-actuators developed in the Roberval Laboratory (UMR 7337) have to be controlled in a remote way using free-space optics (ANR Readmi). This kind of micro- actuators can switch using electromagnetic Lorentz force between stable positions (held by magnetic forces). Matrix of NxM digital actuators are developed for many applications such as optical fiber switch, micro-conveyance and measurement systems...
Keywords:Wireless optical communications, wavelength coding, quadrant photodetector, free-space optics, Gbit/s bitrate, selective optical filters, On-OFF Keying modu-lation, remote control of micro-actuators array. State of progress, results: After the definition of the optical wireless communica-tion link between systems, different system components were chosen. First prototypes of trans-mitter and receiver electronic circuits were fabricated. These circuits were used to establish a first free-space optical communication link. FPGAs are programmed for coding and modulation high-speed data and to decode and demodulate optical received signal. Different transmitted wavelengths were also mixed on one optical beam and at receiver stage, optical filters and four quadrant photodiodes were used to detect different wavelengths. Signals are multiplexed using dichroic mirrors that each one is able to add one wavelength to the transmitted beam. Optical filters are fabricated on thin cylindrical glass substrate where each quarter can only detect a single wavelength and filter the others in a manner that each quadrant of the photodiode receives only one wavelength. First tests of fixed transmission link in-cluded all components are already done. In addition, the optimization of filters and dichroic mirrors selecti-vity and the accurate positioning of filters relatively to photodiode are under work.
For the array of micro-actuators project, a first proto-type of optical switch is already developed and optical communication characterizations were done. The op-timization of the design is under study and a second prototype will be fabricated in next months. Further work, schedule: - Characterization of transmitted signal between transmitters and receivers at different wavelength - Realization of a second prototype of transmitter and receiver after optimization of circuit to be adapted for high-speed communication - Finalization of programs used to send data at trans-mitter and data processing at receiver stage - Study of the optical localization and tracking system between mobile systems - Proof of concept of communication between mobile systems (4 wavelengths) - A second prototype of the optical switch will be de-veloped and characterized List of publications related to the postdoc:- “Mini optical concentrator design for indoor high bit rate optical wireless communications”, International workshop on optical wireless communi-cations IWOW 2013 - “1 × 4 Optical Switch Based on a Four Discrete Posi-tion Digital Actuator”, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besançon, France - “Characterization of optical switch based on a four discrete position digital actuator for telecommunication” International Symposium on Op-tomechatronic Technologies – ISOT 2014 (to be submitted the 15th of July) - “Systèmes de communication optique haut débit et sans fil pour systèmes mobiles”, Patent n° 1360180 (France) - “Design, modeling and characterization of an optical switch based on four positions digital actuator” IEEE/ASME Transactions on Mechatronics (to be submitted) Participation to proposal submitted to the ANR: During fall semester of 2013 and spring semester of 2014, active participation in the writing of two ANR proposal: “Localization and InTErconnections of in-door Mobile Objects using dynamic opTIcal Wireless links (LITEMOTIW)” under evaluation (phase 2). This proposal is strongly connected to the multi-wave-length communication in free space application. “Multiple discrete positions Digital micro-Actuators for oPticAl fibeRs inTerconnexion” (MEDIAPART), Ranking (phase 1): 53 at the fist selection stage. This proposal is strongly connected to switch application.
79

80 Labex MS2T Activity Report 2013-2014
Project Sheet - Postdoc
Name: RADAK JovanStatus: PostdocSupervisor(s) of the postdoc: Bertrand Ducourthial, Véronique CherfaouiResearch unit: Heudiasyc
Title: Distributed data fusion and the theory of belief functions
Description of the project:The Theory of Belief Functions has been introduced by Dempster (1968) and Shafer (1976), and has been further developed by Smets (Transferable Belief Mo-del) in the 1990’s. It is also known as Dempster-Shafer theory or Evidence. It is a formal framework for repre-senting and reasoning from partial (uncertain, impre-cise) information, by generalizing both the Set-Mem-bership approach and the Probability Theory. During this postdoctoral study, we will focus on appli-cations of the Theory of Belief Functions in distributed systems. This study is a continuation of previous work done in the joint research unit CNRS-UTC Heudiasyc regarding distributed data fusion by the supervisors of this postdoctoral study. We are proposing fundamental applications for vehi-cular networks, based on hardware and software platforms (Airbox units and Airplug Software Distribu-tion) of the laboratory. Main idea is to extend current experimental platform with additional wireless sensor units that will serve us as the source of information on which we intend to apply algorithms based on the theory of belief functions. We also plan to apply dis-tributed data-fusion algorithms on the fundamental mechanisms in distributed systems.
Keywords: Distributed data fusion, belief functions, vehicular networks, wireless sensors
State of progress, results:- Development of the experimental platform that in-cludes wireless sensors and road side units (RSU) – platform has been deployed using three RSUs (Air-box units – developed in laboratory) in the Centre de Recherches and wireless Xbee sensors (that measure environmental parameters – temperature, humidity and luminosity)- Software support for the wireless sensors in the Air-plug Software Distribution; software support includes communication of wireless sensors with RSUs, log-ging of retrieved data, possibility to use this data in repeated experiments with different time steps- Development, deployment and software support for experimental testbed is described in the article presented on the WiSARN workshop [1]- Implementation of distributed data-fusion using the
data gathered from the testbed. We are using tempe-rature measurements and we have instantiated gene-ric distributed data fusion algorithm provided with the Airplug Software Distribution (as MET application) in such a way that it can detect, thanks to the readings from wireless sensors, possibility of ice on the road. We have studied this model for the specific cases that may appear on the road – the places with sudden drops of temperature and with the possibility that the ice on the road may appear. The results are promising and we can conclude that our model can be used to predict possibility of dangerous events (ice) on the road. Moreover, we can state that our approach al-lows earlier alert on the road danger, specially in the cases when the readings from sensors do not match.- Our results prove that data-fusion is interesting to-pic for the intelligent transport systems. Data-fusion, used in the way that we propose, can improve alerts for the drivers and significantly diminish imprecision due to the disagreement between sensors.- These results are gathered and we plan to publish them as an article [2] on the Vehicular Networking Conference- We plan to run series of road-tests as a proof of concept for our model
List of publications related to the postdoc[1] Jovan Radak, Bertrand Ducourthial, Véronique Cherfaoui and Stéphane Bonnet.Design and Implementation of the Vehicular Network Testbed Using Wireless Sensors. In The 8th International Workshop on Wireless Sensor, Actuator and Robot Networks (WiSARN), Benidorm, Spain, June 2014.[2] Jovan Radak, Bertrand Ducourthial and Véronique Cherfaoui.Early Detection of Dangerous Events on the Road Using Distributed Data Fusion. [to be submitted to] IEEE Vehicular Networking Confe-rence (VNC).
Project Sheet - Postdoc
Name: BORDES Jean-BaptisteStatus: PostdocSupervisor(s) of the postdoc: Franck DavoineResearch units: Heudiasyc, LIAMA, PKU China
Title: Evidential Grammars for traffic scene understanding
Description of the project:Hierarchical generative models have known recently a growing interest for the task of scene understanding. These models are indeed very appealing as they can take into account contextual information as well as the compositional structure of the underlying object
80

81Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
categories. However, until now their performances have not been as convincing as they were expected to be, and the main cause is the difficulty of performing the training and the inference steps. In this project, we augment a hierarchical model with belief functions in order to take into account the uncertainty of the knowledge about the scene decomposition. The infe-rence and training tasks can thus be performed more efficiently since the uncertainty of the parameters es-timation is better taken into account. The relevance of our approach is then evaluated on multimodal traffic scene data from the KITTI benchmark suite.
Keywords:Computer vision, belief functions, scene understanding, visual grammars
State of progress, results:The evidential grammars framework has been pre-cisely defined, a training and inference scheme has also been devised. While evidential grammars are a very general framework, an evidential grammar model has been implemented and applied for the particu-lar case of traffic scenes. A ground truth database of 300 images has been annotated manually and the model has been evaluated using cross-validation. The framework has been compared with stochastic grammars and with the Annotation Labelling Environ-ment (ALE). It appears that the results are close to the state of the art but is significantly more computatio-nally heavy. Though, better results are obtained for “things”, which are types of classes which are well defined in terms of shape and sizes. This makes this framework interesting for image annotation.
Further work, schedule:An article will be submitted shortly to the “Pattern Recognition” journal. The project will then be finished.
List of publications related to the postdoc: • Evidential Grammar Framework for Image In-terpretation. Application to Multimodal Traffic Scene Understanding. IUKM 2013. Pékin. Jean-Baptiste Bordes, Franck Davoine, Thierry Denoeux, Philippe Xu. • Information Fusion and Evidential Grammarsfor Object Class Segmentation. PPNIV 2013. Tokyo. Jean-Baptiste Bordes, Philippe Xu, Franck Davoine, Huijing Zhao, Thierry Denoeux. • Fusion d’informations pour la comprehensionde scènes. Traitement du Signal. Philippe Xu, Franck Davoine, Jean-Baptiste Bordes, Thierry Denoeux.
Project Sheet - Postdoc
Name: FIGUEIREDO RosaStatus: PostdocSupervisor(s) of the postdoc: Antoine JougletResearch unit: HeudiasycCo-funding: Labex MS2T, ALSTOM
Title: Robust control command strategies in a contract-based collaboration framework
Description of the project:Two systems (client and partner) both producers and consumers of a same kind of energy resource are considered. These two systems have to collaborate in aim to balance their consumption and production over a given time horizon. This collaboration is established by the use of a set of contracts of consumption or production offered by the partner. The partner deter-mines the set of contracts and sets a price to engage each one. At any time period, the client can consume the energy resource out of any engaged contract but at a very high cost which can vary with the time period. The client system is composed by subsys-tems that produce/consume the energy resource. The consumption/production can be driven for a subset of these systems (drivable systems) while the consump-tion/production is already planned for the other ones (non-drivable systems). Some of the drivable sys-tems can store the energy resource under a capacity constraint (storage systems) and provide it when it is needed. For a part of the non-drivable systems, only uncertain previsions of the consumption/production are known (uncertain non-drivable systems). From a real time point of view, the instantaneous production/consumption of each system is measured every ∆ time units. It is also at this time scale that drivable systems are driven. A real time command strategy is a function defined for a given time period which asso-ciates a set of decisions to every ∆ time units. The optimization problem consists in determining an opti-mal (according to the cost) contract subscription from the client to the partner in such a way that there exists a robust real time command strategy which satisfies any consumer demands of the client subsystems over the time horizon and in such a way that each commit-ment taken by the client with the partner is honored.
Keywords:Energy planning, Robust optimization, Flexible com-mitments, Combinatorial optimization, Real time com-mand strategy.
State of progress, results:We denote this problem as the Robust Contract-based Collaboration (RCbC) and its deterministic version as DCbC. We focused our initial efforts in a literature search for related problems. The RCbC problem is related with the retailer-supplier problem
81
82 Labex MS2T Activity Report 2013-2014
with flexible commitments and the design of hybrid energy systems. We have found many deterministic solution approaches for these problems and a few number of robust optimization approaches. We for-mulated the DCbC problem as a mixed integer linear problem. A time decomposition strategy was applied. In the first level, the integer formulation models the set of decisions that must be taken at the beginning of each time period considering the state of each system at that moment. In the second level, a real time com-mand strategy is defined (by a very simple polinomial algorithm) assuming that an optimal solution for the first stage is provided. In addition, we developed a dynamic programming algorithm for a special case of the DCbC problem. For the RCbC, we have proposed a robust formulation (for the first level of the time de-composition approach) in which adjustable variables are replaced by affined decision rules. Currently, we are implementing these formulations and algorithms. The next stage of this research consists in comparing
the results obtained with them.
Project Sheet - Postdoc
Name: ARDUIN Pierre-EmmanuelStatus: PostdocSupervisor(s) of the postdoc: Marie-Hélène Abel and Benoit EynardResearch units: Heudiasyc, Roberval
Title: Semantic models alignment for product lifecycle management based on the MEMORAe project
Description of the project:The aim of this postdoctoral work is to semantically align a Product Lifecycle Management (PLM) model with a domain ontology of the MEMORAe project so that such systems may interoperate. Indeed they become a system of systems in the sense that seve-ral systems collaborate as well as they may function independently in order to realize their own operational tasks. We observed, argue, and defend that such sys-tem of systems ensures knowledge sharing through PLM systems within extended enterprises.From compatibility to interoperability, this postdocto-ral work leads to the elaboration of a system of sys-tems in order to ensure not only information and data sharing through PLM systems, but also knowledge sharing through such systems, and particularly tacit knowledge. Indeed the MEMORAe platform allows stakeholders to collaboratively elaborate a shared un-derstanding of what a concept means. Such shared understanding may be disseminated within extended enterprises though a PLM system, regardless whether individuals are spread throughout the world.
Keywords:System of Systems, Knowledge Sharing, Extended Enterprise, Tacit Knowledge, Semantic Interoperabi-lity, Product Lifecycle Management.
State of progress, results:We already proposed (1) to outline a semantic align-ment between a domain ontology of the MEMORAe project and a PLM system, and (2) to highlight the conditions under which a piece of information sha-red through a PLM system may lead to one and only one interpretation within the envisaged system of sys-tems. Step (1) allows individuals to elaborate a sha-red understanding through the use of the MEMORAe platform, supporting tacit knowledge sharing, whe-reas step (2) leads to ensure explicited knowledge sharing, i.e. knowledge that has been made explicit by someone within a certain context.We observed a strong interest for this work from our colleagues not only in France but also in Europe during international conferences. We submitted articles to four international conferences, one natio-nal conference (France), and one international journal. At the moment of writing this report (17/06/14), one international conference and one poster have been accepted.
List of publications related to the postdoc:Accepted: •Arduin,P-E.,LeDuigou,J.,Penciuc,D.,Abel,M-H. and Eynard, B., 2014. “Knowledge Sharing Wit-hin Extended Enterprises: Case of Product Lifecycle Management systems”, European Conference on Knowledge Management (ECKM) 2014, Santarém, Portugal, September 4-5. • Arduin, P-E., Le Duigou, J., Abel, M-H. andEynard, B., 2014. “Impact of Individual Cognition on Product Lifecycle Management Systems”, Poster at the International Conference on Design Computing and Cognition (DCC’14), London, UK, June 23-25.
Submitted: • Arduin, P-E., Le Duigou, J., Abel, M-H. andEynard, B., 2015. “Knowledge Sharing in Design based on Product Lifecycle Management Systems”, International Conference on Research into Design (ICoRD’15), Indian Institute of Science, Bangalore, India, January 7-9, submitted. •Arduin,P-E.,LeDuigou,J.,Abel,M-H.andEy-nard, B., 2014. “Systèmes d’information d’entreprise support de la gestion des connaissances : le cas des systèmes PLM”, International Conference on model-ling, optimization and simulation of systems (MO-SIM’14), Nancy, France, November 5-7, submitted. •Arduin,P-E.,LeDuigou,J.,Penciuc,D.,Abel,M-H. and Eynard, B., 2014. “Towards tacit and expli-cited knowledge sharing: an implementation in Pro-duct Lifecycle Management systems”, International Journal of Product Lifecycle Management, submitted.
82

83Labex MS2T Activity Report 2013-2014
Rejected: •Arduin,P-E.,Abel,M-H.andEynard,B.,2014.“Sur l’impact des processus cognitifs individuels dans la conception de systèmes d’information d’entreprise supports du partage de connaissances”, Ingénierie des Connaissances, Clermont Ferrand, France, May 12-16, rejected. •Arduin,P-E.,Abel,M-H.andEynard,B.,2014.“Impact of Individual Cognition on the Specification and Development of Computing Systems: A case study for Product Lifecycle Management Systems”, International Conference on Design Computing and Cognition, London, UK, June 23-25, rejected.
Project Sheet - Postdoc
Name: VIDAL GuillaumeStatus: PostdocSupervisor(s): Eric LeclercResearch unit : BMBI
IntroductionIn this project, we aimed for completing the experimen-tal set of data in the intestine liver microfluidic biochip co culture model to be able to run and to apply the mathematical models to analyse the bioreactor data. For that purpose human cells were exposed to speci-fic xenobiotic, the antidiabetic drug troglitazone. The xenobiotic is followed in the bioreactor compartment (intestine, liver). Then the data will be collected to sup-port the construction of an integrated mathematical model. The second part of the project will consist to build the in silico approach. This approach will consist to the integration of the organs and cellular-molecular scales phenomena in the same framework. The cellu-lar and molecular levels will be addressed using the systems biology models describing the tight junction, Nrf2 activation and the GSH depletion. Those models have been selected because they describe important phenomena involved in the xenobiotic toxicity. Seve-ral studies have proposed a variety of mechanisms of troglitazone cytotoxicity, including parent compound toxicity in human hepatocytes, the formation of reac-tive intermediates and glutathione (GSH) conjugates in human liver microsomes and apoptotic potentials in cultured human hepatocytes.
MethodsThe co-culture perfusion deviceThe co-culture bioreactor was named an Integrated Insert in a Dynamic Microfluidic Platform (IIDMP). This co-culture bioreactor is a polycarbonate fluidic plat-form composed of three identical and parallelized per-fusion co-culture units. The platform was manufactu-red to integrate three cell culture inserts (the inserts having the conventional 6-transwell plates format) with three liver microfluidic biochips. Each co-culture unit contained two wells used as reservoirs, one cell
culture insert and one microfluidic biochip. The cell culture insert was located in the first well. To make recirculating perfusion possible, the second well and basolateral compartment of the first well were also connected to a peristaltic pump by a specific cover hermitically closing the box.
Experimental procedure of the dynamic co-culture Each experiment took place over 3 days. Before ino-culating the cells, a coating step with collagen was performed. Then, we seeded the human primary he-patocytes (Biopredic) in the microfluidic biochips with a density of 400 000 cells per biochip. The seeding was directly performed by micropipetting in the bio-chips when they were connected to the IIDMP. After cell inoculation, the Caco-2 TC7 inserts were transfer-red into the first wells of the IIDMP. Then the box was closed hermetically with the cover and placed in static conditions (no flow rate perfusion) at 37°C in a humi-dified air atmosphere 5% CO2 incubator. The box co-ver was then connected to the pump with PTFE tubes and the perfusion was launched for 24h to at 25µL/min in the incubator. .
Figure : Principle (A), design (B) and experimental steps (C) of the intestinal and hepatic co-culture (modified from Bricks et al. 2014)
Cell medium samples have been taken at different time points (2h, 4h, 6h and 24h) and frozen to analyse the TGZ and its metabolites content with Mass spec-trometry to correlate Cell bioassays with xenobiotic amount in the Integrated Insert in a Dynamic Micro-fluidic Platform (IIDMP).
Cell BioassaysCells were stained for mitochondrial intermembrane potential (∆ńm) with fluorescent dye Mitotracker TMRE and for hydrogen peroxyde with Carboxy-DCFDA (Molecular probes).
Ap
pen
dic
es

84 Labex MS2T Activity Report 2013-2014
(A) TMRE and (B) DCFDA staining of hepatocytes when exposed for 24h to 100µM -TGZ
Mean fluorescence intensity meassurement with ImageJ software and statistical analysis (Kruskal Wallis non parametric test)
Total Glutathione pool and its oxidized (GSSG) and reduced (GSH) form were measured with the Gluta-thione (GSH/GSSG/Total) Fluorometric Assay Kit (Bio-vision).
Results and DiscussionMitochondria staining with the dye Mitotracker TMREallow the monitoring of the intermembrane potential (∆Ψm) of the hepatocytes mitochondria. After 24h treatment with Troglitazone (TGZ), results are :
Mean value:Control: 23.39 ±2.18TGZ 10µM: 25.21 ± 2.29TGZ 100µM: 18,46 ± 3.81The mitochondrial ∆Ψm is statistically lower in 100µM TGZ-treated cells compared to the control condition.
Hypothesis •Impairmentoftheexternalmitochondrialmem-brane, leading to a (at least partly) loss of the electron transfert along mitochondrial electron transport chain and proton pumping in the intermembrane space. •Decreaseinelectrontransfertflowinthemito-chiondrial electron transport chainAlthough the mitochondrial dysfunction is helpful to explain the toxicity mechanism independent of a reactive metabolite, the precise mechanism remains unclear, because data for direct effects of troglitazone or other thiazolidinediones on the function of isola-ted mitochondria have not been available. Studies have suggested a pathogenetic role of mitochondrial permeability transition (MPT) in the mitochondria-me-diated hepatocyte injury by chemical agents. MPT is characterized by a progressive permeabilization of the inner mitochondrial membrane dependent on the excessive amount of intramitochondrial Ca2+ and re-sults in mitochondrial swelling, decrease in mitochon-drial Ψ and release of accumulated Ca2+. Recently, an increase in the mitochondrial volume and a para-doxical decrease in the mitochondrial transmembrane potential (∆Ψm), accompanied by a significant pro-duction in the reactive oxygen species (ROS), have been shown to be involved in drug-induced epithelial cell differentiation, raising the possibility for similar mitochondrial abnormalities in troglitazone-treated human hepatocytes.
Hydrogen peroxide staining with carboxy-DCFDAMean value:Control: 26.09 ±3.18TGZ 10µM: 24.287 ± 3.03TGZ 100µM: 30,437± 3.78
Fluorescent staining of hydrogen peroxide revealed a statistically significant increased in 100µM TGZ-treated hepatocytes, suggesting oxidative stress.
HypothesisReactive oxygen species accumulation reveals un-balance between production and detoxification in treated-cells. We thus measured the levels of the ma-jor antioxidant molecules in cells, Glutathione, in the culture medium during the troglitazone treatment.-Total glutathione pool of control samples (solvant) is 2 fold higher when compared to 100µM TGZ-treated cells.-The GSSG/total Glutathione ratio value is 0.55 in control samples and is 0.78 in 100µM TGZ treated cells.From these measurement we can conclude that the total glutathione pool is globally lower and more oxi-dized in the 100µM TGZ -reated cells when compared to control samples.This may be due to a down-regulation of the Ascor-bate/Glutathione cycle enzymes and/or their encoding genes induced by troglitazone and/or its metabolites.
Future workSamples (Cells pellets and medium aliquots during exposition to TGZ 100µM) harvested at different time points have been stored at -80°C for necessary fur-ther analyses: Glutathione pool, Troglitazone and its metabolites levels measurement, key genes (involved in ROS and xenobiotic metabolism) expression levels.
Project Sheet - Research Engineer
Name: SANAHUJA GuillaumeStatus: Research EngineerSupervisor: Philippe BonnifaitResearch unit: Heudiasyc
Title: Research Engineer for the UAVs fleet
Description of the project:The aim of the project is to build entirely a fleet of UAVs (5 to 10), using hardware bought from the Robo-tex project. Indeed, of the shelves UAVs are not fully open and they will not feet exactly our needs. Thus we decided to build the fleet from scratch, using our previous experience.
A B

85Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
The fleet will be used by researchers involved in Ro-botex and Labex MS2T projects. The goal is to deve-lop algorithms able to control the whole fleet and to move it in formation for example. The advantage of the fleet is that it can cover more area, which is very useful for tasks like surveillance or inspection. Moreo-ver, our idea is also to develop a so called perpetual fleet of UAVs. This fleet will be perpetually flying, and UAVs will recharge themselves one after the other on a ground station (like our Robotex’s experimental truck); the key point is how to use a shared resource.Finally, an outdoor flight arena will be built in order to test the fleet in real conditions but securely. Indeed this arena will be fully closed by wire fence.
Keywords:UAV, fleet, embedded systems, embedded vision, real time system
State of progress, results:We decided to build our own frame for the UAV. This allows to have a maximum of flexibility and to build a frame which can perfectly integrates all sensors and electronics needed by Robotex project. CAD of the octorotor was realized by our team (see figure 1), and a 3D printer and a CNC milling machine where bought and used to make first prototype, see figure 2.
Figure 1: CAD view of the octorotor
Figure 2: Octorotor
An electronic board was also designed and realized (see figure 3) to interface the main processor with motors and sensors. This board is able to control the UAV using a real time OS (Linux and Xenomai), and thanks to an embedded DSP (Digital Signal Proces-sor), is also able to do embedded vision like compu-ting optical flow.
Figure 3: Electronic board v2
A software framework was developed in order to faci-litate programming of applications for UAV. Using this framework, integration of sensors, actuators and fil-ters is straightforward, and each of them can be lin-ked to another one automatically. The framework also manages the ground station, so the programmer does not have to care about how to exchange information between UAV and ground station. The framework automatically sends data to the ground station, and each item’s (sensor, filter, etc) configuration is chan-geable from the ground.Finally, a simulator was also developed. It allows run-ning the exact programs of the UAVs on a compu-ter. The aim is to test the programs of the fleet in a single computer; to be sure that there is no bug and all is working as expected. Thus, it avoids unneces-sary crashes on real flights, and will save time on the developments. The simulator uses a 3D world and is also able to provide virtual pictures of embedded camera in order to test image processing algorithms, see figure 4.
Figure 4: Simulator. Left: global view.Top right: bottom camera. Bottom right: front camera

86 Labex MS2T Activity Report 2013-2014
My work also consists in helping any researcher from the laboratory to use the experimental platform. Thus, I gave several seminars and tutorials to introduce the developed framework; I helped researchers to write their programs and to do any experiments.
List of publications related to the workGuillaume Sanahuja, Drone quadrirotor suivant une ligne par vision, 4ièmes Journées des Démonstra-teurs en Automatique à vocation recherche, 12 - 13 juin 2013, Angers.
Osamah Saif, Zhicheng Hou, Isabelle Fantoni, Guillaume Sanahuja, Simulateur de flotte de drone, 4ièmes Journées des Démonstrateurs en Automa-tique à vocation recherche, 12 - 13 juin 2013, Angers.
Zavala-Rio, Arturo, Fantoni, Isabelle; Sanahuja, Guillaume; Finite-time-observer-based output- feedback control for the global stabilization of the PV-TOL aircraft with bounded inputs ; International Jour-nal of Systems Science ; accepted.

87Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Appendix 4 - Open call for MS2TResearch Chairs in Systemsof Systems
Université de Technologie de Compiègne - France www.labexms2t.fr
The Laboratory of Excellence (Labex) MS2T at Uni-versité de Technologie de Compiègne (UTC), suppor-ted by Centre National de la Recherche Scientifique (CNRS), invites applications from scholars, such as assistant or full professors to long-term junior or se-nior Research Chairs. These temporary appointments will last from 1 year to 3 years, renewable. Tenured academic positions are not granted, but may be ope-ned to the most successful recipients.The MS2T research Chairs aim to attract very high-level researchers to join the MS2T project striving towards excellence in the field of Systems of Sytems (SoS). We look for candidates provividing as quickly as possible an international stature to this project in the field of SoS, to the mutual benefit of both parties.All transdisciplinary research proposals related to the field of Technological Systems of Systems are welco-med. The Research Chairs are expected to initiate or develop collaborative, interdisciplinary research with UTC faculty associated to the MS2T project.
QualificationsThe available positions are assigned through a com-petitive but light selection procedure. Candidates should have held the Ph.D. or equivalent professional degree, with strong record of research publications.
Junior Research ChairsThis type of Chair concerns internationally recogni-zed researchers who typically defended their PhD thesis 5 to 8 years ago. The successful candidates will be hired on temporary appointments during the initial project lifetime (12 to 36 months). Additional financial support will be allocated for equipment and laboratory facilities (such as PostDoc, PhD grants or research staff).
Senior Research ChairsThis type of Chair concerns internationally recogni-zed researchers who typically defended their thesis more than 8 years ago. The successful candidates will be hired on temporary appointments during the initial project lifetime (06 to 24 months). Additional financial support will be allocated for equipment and laboratory facilities (such as PostDoc, PhD grants or research staff).
SalaryThe Research Chairs will be rewarded according to qualifications and experience. Recipients will be provided with a fully equipped office, secretarial and funding support. Travel grant will be allocated and accompanying measures for the settlement and stay in France are available.
TimelineThe call is open for visits starting now until the end of 2015.
Application ProcedureThe applicant should send to [email protected]• aresearchproposal(approx.5-10pages),• aCVwithfullpublicationlist.
InquiriesInquiries may be sent to Isabelle Fantoni ([email protected]) or Yves Grandvalet ([email protected]).
About Labex MS2T(see http://www.utc.fr/labexms2t for more details)The national initiative “Laboratories of Excellence” (LabEx) aims to select internationally renowned la-boratories of excellence and to provide them with the means that enable them to keep pace with their foreign counterparts and to attract top level foreign researchers. It should help them build a high-level integrated higher education, training and technolo-gy transfer policy. The MS2T LABEX (Laboratory of Excellence) fosters research dedicated to the control of technological Systems of Systems (SoS), in trans-port and mobility, security, and e-Health. MS2T is a transdisciplinary research project, with three broad research topics:
1. Interaction and cooperation among systems• Managementofinformationflowsinnetworks• Distributedinformationprocessing• Theautonomyofinteractingsystems
2. Management of uncertainties• Modelingofuncertainties• Robustnessinthefaceofuncertainties and integrity• Uncertaintyindigitalmodeling

88 Labex MS2T Activity Report 2013-2014
3. Optimized design of SoS• Multi-levelandmulti-physicaloptimization• Schedulingandsynchronization of mobile sub-systems• OperationalsafetyoftechnologicalSoSs
With more than 60 faculties and 180 PhD candidates, the MS2T initiative aims at becoming a leading Euro-pean institute in these research topics driven by the control of SoS.
About Compiègne, UTC and CNRSResidence of sovereigns since the origin of the mo-narchy, Compiègne is now a countryside town at the doors of Paris, with a strong student population (more than 4’000 out of 40’000 inhabitants). It is also a tourist destination whose castles are surrounded by one of the largest forest of France. Compiègne is conveniently located, 70 kms away from Paris which is easily accessed by train or car. The International Roissy/Charles de Gaulle Airport is only 40 minutes away.
Université de Technologie de Compiègne is a public institution which delivers Engineering degrees, Masters, and PhD. Its main missions are education, research and technology transfer. Created in 1972 as a new model in the French higher education system, UTC is now a successfull educational institution in the French academic landscape, classified as a top- ranked engineering formation.
The National Center for Scientific Research (CNRS) is a government-funded research organization, under the administrative authority of France’s Ministry of Research. The CNRS operates through its own labo-ratories, as well as others run jointly with universities, fellow research organizations and industry. These laboratories are located throughout France, and several are even outside the country.

Ap
pen
dic
es
89Labex MS2T Activity Report 2013-2014
Appendix 5 - Open call for Visiting Scholars: Labex MS2T Fellowships
Université de Technologie de Compiègne - France www.labexms2t.fr
The Laboratory of Excellence (Labex) MS2T at Uni-versité de Technologie de Compiègne (UTC) invites applications from scholars, such as assistant or full professors who would like to spend a minimum of one month of their sabbatical at UTC. The MS2T fellowships aim at promoting UTC colla-borations with outstanding scholars. All transdisciplinary research proposals related to the field of “Technological Systems of Systems” (TSoS) are welcomed. The fellows are expected to initiate or develop collaborative, interdisciplinary research with UTC faculty associated to the MS2T project.
The fellows should be present full-time at UTC for at least 1 month and give a research seminar or public lecture. The typical visiting period ranges from one to three months, though longer visits may be arranged. The available positions are assigned through a com-petitive selection procedure. Preferential treatment is given to candidates who have never held a visiting position at UTC in the past.
QualificationsCandidates should have held the Ph.D. or equivalent professional degree, with strong record of research publications. They typically hold faculty appointments at other institutions.
SalaryThe award comprises a one-off payment (travel grant) plus a gross salary that will be based on qualifications and experience. The salary is provided for a stay of up to three months and it is subject to negotiation for longer periods. Besides, the fellows will be provided with a fully equipped office and secretarial support.
TimelineThe call is open for visits starting now until the end of 2015.
Application ProcedureThe applicant should send to [email protected]:• ashortresearchproposal(approx.1-2pagesfor1-3 months visits, longer otherwise) specifying the proposed duration and starting date of visit,• aCVwithfullpublicationlist.
About Labex MS2TThe national initiative “Laboratories of Excellence” (LabEx) aims to select internationally renowned laboratories of excellence and to provide them with the means that enable them to keep pace with their foreign counterparts and to attract top level foreign researchers. It should help them build a high-level integrated higher education, training and techno-logy transfer policy.The MS2T LABEX (Laboratory of Excellence) fosters research dedicated to the control of technological Systems of Systems (SoS), in transport and mobility, security, and e-Health.
MS2T is a transdisciplinary research project, with three broad research topics:
1. Interaction and cooperation among systems• Managementofinformationflowsinnetworks• Distributedinformationprocessing• Theautonomyofinteractingsystems
2. Management of uncertainties• Modelingofuncertainties• Robustnessinthefaceofuncertainties and integrity• Uncertaintyindigitalmodeling
3. Optimized design of SoS• Multi-levelandmulti-physicaloptimization• Schedulingandsynchronizationof mobile sub-systems• OperationalsafetyoftechnologicalSoSs
With more than 50 faculties and 180 PhD candidates, the MS2T initiative aims at becoming a leading Euro-pean institute in these research topics driven by the control of SoS.
90 Labex MS2T Activity Report 2013-2014
Appendix 6 -Publications (2013-2014)
International Journals
2014
Aguirre F., Destercke S., Dubois D., Sallak M., Jacob C. “Inclusion-exclusion principle for belief functions”, International Journal of Approximate Reasoning 55, 8 (2014) 1708-1727 [hal-01056459]
Bachir A., Bechkit W., Challal Y., Bouabdallah A. “Joint Connectivity-Coverage Temperature-Aware Algorithms for Wireless Sensor Network”, IEEE Tran-sactions on Parallel and Distributed Systems (2014) 1-14 [hal-01006039]
Ben Abdallah N., Mouhous-Voyneau N., Denoeux T. “Combining statistical and expert evidence using be-lief functions: Application to centennial sea level esti-mation taking into account climate change”. Interna-tional Journal of Approximate Reasoning, 55, 1, Part 3 (2014), 341–354
Dao T.T., Rassineux A., Charleux F., Ho Ba Tho M.C. “A Robust Protocol for the Creation of Patient Speci-fic Finite Element Models of the Musculoskeletal Sys-tem from Medical Imaging Data”. Computer Method. Biomechanics and Biomedical Engineering : Imaging & Visualisation, DOI:10.1080/21681163.2014.896226 (to appear)
Denoeux T., El Zoghby N., Cherfaoui V., Jouglet A. “Optimal object association in the Dempster-Shafer framework”, IEEE Transactions on Cybernetics (2014) (to appear)
Garcia L. R., Flores G., Sanahuja G., Lozano R. “Quad Rotorcraft Switching Control: An Application for the Task of Path Following”, IEEE Transactions on Control Systems Technology, 22, 4 (2014) 1255-1267.
Guerriero F., Surace R., Loscri V., Natalizio E. “A Multi-objective Approach for Unmanned Aerial Vehicle Rou-ting Problem with Soft Time Windows Constraints”Applied Mathematical Modelling 38, 3 (2014) [hal-00917512]
Kanjanatarakul O., Sriboonchitta S., Denoeux T. “Forecasting using belief functions: an application to marketing econometrics. International Journal of Approximate Reasoning”, 55, 5 (2014), 1113–1128
Kurdej M., Moras J., Cherfaoui V., Bonnifait Ph. “Controlling Remanence in Evidential Grids Using Geodata for Dynamic Scene Perception”. Internatio-nal Journal of Approximate Reasoning, 55, 1 (2014) pp. 355-375
Lebon, J., Le Quilliec, G., Breitkopf, P., Coelho, R. F., Villon, P. “A two-pronged approach for springback variability assessment using sparse polynomial chaos expansion and multi-level simulations” International Journal of Material Forming, 7, 3 (2014), 275-287
Lomet A., Govaert G., Grandvalet Y. “Model Selection for Gaussian Latent Block Clustering with the Inte-grated Classification Likelihood”, Advances in Data Analysis and Classification (Feb. 2014) DOI: 10.1007/s11634-013-0161-3 [hal-00913680]
Qiu S., Sallak M., Schön W., Cherfi-Boulanger Z. “Availability assessment of railway signalling systems with uncertainty analysis using Statecharts”, Simu-lation Modelling Practice and Theory 47 (2014) 1-18 [hal-01060569]
Qiu S., Sallak M., Schön W., Cherfi-Boulanger Z., “Modeling of ERTMS Level 2 as an SoS and Evalua-tion of its Dependability Parameters”, IEEE Systems Journal (to appear)
Rault T., Bouabdallah A., Challal Y. “Energy Efficien-cy in Wireless Sensor Networks: a top-down sur-vey”, Computer Networks 67, 4 (2014) 104-122 [hal-01009386]
2013
Bachir A., Bechkit W., Challal Y., Bouabdallah A. “Tem-perature-Aware Density Optimization for Low Power Wireless Sensor Networks”, IEEE Communications Letters 17, 2 (2013) 325-328 [hal-00799905]
Bechkit W., Challal Y., Bouabdallah A., Tarokh V. “A Hi-ghly Scalable Key Pre-Distribution Scheme for Wire-less Sensor Networks”, IEEE Transactions on Wireless Communications 12, 2 (2013) 948-959 [hal-00799911]
Bechkit W., Challal Y., Bouabdallah A. “A new class of Hash-Chain based key pre-distribution schemes for WSN”, Computer Communications 36, 3 (2013) 243-255 [hal-00776477]
Baudoin R., Prot J.M., Nicolas G., Brocheton J., Brochot C., LegallaisS C. , Benech H., Leclerc E. “Eva-luation of seven drug metabolisms and clearances by cryopreserved Human primary hepatocytes cultivated in microfluidic biochips”. Xenobiotica, 43, (2013) 140-152
Dang D.-C., Guibadj R. N., Moukrim A., “An effective PSO-inspired algorithm for the team orienteering problem”. European Journal of Operatio-nal Research (EJOR) 229, 2 (2013) 332-344.
Decorato I., Kharboutly Z., Legallais C., Penrose J., Salsac A.-V. Numerical simulation of the fluid structure interactions in a compliant patient-specific arteriove-nous fistula. Int. J. Num. Meth. Biomed. Eng. (2013). DOI: 10.1002/cnm.2595

Ap
pen
dic
es
91Labex MS2T Activity Report 2013-2014
Guerrero A., Castillo P., Challal Y. “Quadrotors Forma-tion Control A Wireless Medium Access Aware Ap-proach”, Journal of Intelligent and Robotic Systems70, 1-4 (2013) 221-231 [hal-00770471]
Hadjidj A., Souil M., Bouabdallah A., Challal Y., Owen H., “Wireless Sensor Networks for Rehabilitation Ap-plications: Challenges and Opportunities”, Journal of Network and Computer Applications 36 (2013) 1-15 [hal-00762929]
Leclerc E., Charleux F., Robert L. , Ho Ba Tho M. C., Rhein C., Latrive J.P., Bensamoun S., “Analysis of the liver viscosity behavior as a function of the Multifre-quency Magnetic Resonance Elastography (MMRE) post-processing”, J. Magnetic Resonance Imaging, 38, 422-428, (2013)
Poss M., Raack C., “Affine Recourse for the Robust Network Design Problem: Between Static and Dyna-mic Routin”, Networks, 61,2 (2013) 180-198
Poss M., “Robust combinatorial optimization with va-riable budgeted uncertainty”. 4OR, 11, 1(2013) 75-92
Raghavan B., Xia L., Breitkopf P., Rassineux A., Villon P., “Towards simultaneous reduction of both input and output spaces for interactive simulation-based struc-tural design”, Computer Methods in Applied Mecha-nics and Engineering, 265, (2013), 174-185
Terrien J. , Germain G. , Marque C. , Karlsson B. “Bivariate piecewise stationary segmentation; im-proved pre-treatment for synchronization measures used on non-stationary biological signals”. Medical Engineering and Physics, 35, 8 (2013)1188-96
International Conferences
2014
Al Harrach M., Boudaoud S., Gamet D., Grosset J. F., Marin F. “Evaluation of HD-Semg Probability Den-sity Function Deformations in Ramp Exercise”. 36th Annual International IEEE EMBS Conference, USA (2014)
Arduin P.-E., Le Duigou J., Abel M.-H., Eynard B., “Impact of Individual Cognition on Product Lifecycle Management Systems”, International Conference On Design Computing And Cognition, UK (2014) [hal-01061015]
Arduin P.-E., Le Duigou J., Penciuc D., Abel M.-H., Eynard B. “Knowledge Sharing Within Extended Enterprises: Case of Product Lifecycle Management systems”, 15th European Conference on Knowledge Management, Portugal (2014) [hal-01061011]
Boudaoud S., Rix H., Al Harrach M., Marin F. “Robust Functional Statistics Applied to Probability Density Function Shape Screening of Semg Data”. 36th An-nual International IEEE EMBS Conference, USA (2014)
Carlier J., Moukrim A., Sahli A. “Scheduling Problems with Production and Consumption of Resources”, Ninth International Colloquium on Graphs and Opti-mization, Italy (2014) [hal-01062593]
Carlier J., Moukrim A., Sahli A. “Nouvelles bornes pour un problème d’ordonnancement avec produc-tion et consommation de ressources, Journées de l’optimisation 2014”, JOPT2014, Canada (2014) [hal-01062589]
Destercke S., Strauss O. “Kolmogorov-Smirnov Test for Interval Data”, 15th International Conference Infor-mation Processing and Management of Uncertainty in Knowledge-Based Systems, IPMU 2014, Montpellier, France (2014) [hal-01045013]
Destercke S. “Multilabel Prediction with Probability Sets: The Hamming Loss Case”,15th International Conference Information Processing and Management of Uncertainty in Knowledge-Based Systems, IPMU 2014, Montpellier, France (2014) [hal-01044994]
El Zoghby N., Cherfaoui V., Denoeux T. “Evidential Distributed Dynamic Map for Cooperative Percep-tion in VANets”, IEEE Intelligent Vehicles Symposium 2014, IV’14, Dearborn, USA (2014) [hal-01023914]
Huang S., Feissel P., Villon P. “multi-scale elasticity identification using modified constitutive relation er-ror”. 11th World Congress on Computational Mecha-nic, Sapain (2014)
Liu X., Bordes A., Grandvalet Y. “Fast recursive multi-class classification of pairs of text entities for biome-dical event extraction” 14th Conference of the Euro-pean Chapter of the Association for Computational Linguistics, Sweden (2014) [hal-01060830]
Lyes T., Challal Y., Bouabdallah A. “C-CP-ABE: Coo-perative Ciphertext Policy Attribute-Based Encryption for the Internet of Things”, International Conference on advanced Networking, Distributed Systems and Applications, Algeria (2014) [hal-01060169]
Moras J., Cherfaoui V., Bonnifait P. “Evidential Grids Information Management in Dynamic Environ-ments”, 17th International Conference on Information Fusion - Fusion 2014, Salamanca, Spain (2014) [hal-01056355]

92 Labex MS2T Activity Report 2013-2014
Petit L., Al Hajjar H., Terrien J., Lamarque F. “1 × 4 Optical Switch Based on a Four Discrete Position Di-gital Actuator”, IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Besançon, France (2014)
Qiu S., Kaza G.-L., Sallak M., Schön W. “A reacha-bility analysis for verification of safety properties of railway infrastructures”, 10th Symposium on Formal Methods for Automation and Safety in Railway and Automotive Systems Syposium, Tool Exhibition and Tutorium, FORMS/FORMAT 2014, Germany (2014) [hal-01060847]
Qiu S., Sallak M., Schön W., Cherfi-Boulanger Z. “Dy-namic reliability modeling using Valuation-Based Sys-tem”, 19th World Congress of the International Fede-ration of Automatic Control, IFAC 2014, South Africa (2014) [hal-01060563]
Rault T., Bouabdallah A., Challal Y., Marin F. “Context-aware energy-efficient wireless sensor architecture for body activity recognition”, IEEE International Confe-rence on Pervasive Computing and Communications Workshops (PERCOM Workshops), WIP PerCom 2014, Hungary (2014) [hal-01009394]
Saif O., Fantoni I., Zavala-Río A. “Flocking of Multiple Unmanned Aerial Vehicles by LQR Control”, Inter-national Conference on Unmanned Aircraft Systems (ICUAS) 2014, USA (2014) [hal-01026318]
Sévénié B., Barthès-Biesel D., Salsac A.-V. “Flow of a capsule in a channel: effect of non-squareness”. Euromech-IUTAM Symposium on Dynamics of Capsules, Vesicles and Cells in Flow DynaCaps2014, Compiègne, France (2014)
Szafranski M., Grandvalet Y. “KEOPS: KErnels Organi-zed into PyramidS”, IEEE International Conference on Acoustics, Speech, and Signal Processing (ICASSP 2014), Italy (2014) [hal-00979394]
Tagne G., Talj R., Charara A. “Passivity Analysis and Design of Passivity-Based Controllers for Trajectory Tracking at High Speed of Autonomous Vehicles”, IEEE International Symposium on Intelligent Vehicles, Dearborn, USA (2014) [hal-01061114]Tagne G., Talj R., Charara A. « Immersion and Inva-riance vs Sliding Mode Control for Reference Trajecto-ry Tracking of Autonomous Vehicles”, 13th European Control Conference, ECC’14, Strasbourg, France (2014) [hal-01061134]
Tagne G., Talj R., Charara A. “Passivity Analysis and Design of a Robust Nested Passivity-Based Control-ler for Trajectory Tracking of Autonomous Vehicles”, 19th World Congress of the International Federation of Automatic Control (IFAC) 2014, South Africa (2014) [hal-01061266]
Xu Ph., Davoine F., Denoeux T. “Evidential combi-nation of pedestrian detectors. t the British Machine Vision Conference (BMVC 2014), UK (2014)
Yang G., Destercke S., Masson M.-H. “Nested Dicho-tomies with probability sets for multi-class classifica-tion”, European Conference on Artificial Intelligence (ECAI), Czech Republic (2014) [hal-01059865]
2013
Aguirre F., Sallak M., Schön W., Qiu S. “On the distinc-tion between aleatory and epistemic uncertainty and its implications on reliability and risk analysis”, Euro-pean Safety and Reliability Conference, ESREL 2013, Netherlands (2013) [hal-00917090]
Al Hajjar H., Fracasso B., Lamarque F., “Mini optical concentrator design for indoor high bit rate optical wireless communications”, 2nd International Works-hop on Optical Wireless Communications (IWOW), UK, (2013)
Attir A., Bouabdallah A., Challal Y., Hadjidj A. “Brai-ded Disjoint Branch Routing Protocol For WSNs”, 8th International Conference on Broadband and Wireless Computing, Communication and Applications - BWC-CA 2013, France (2013) [hal-00871208]
Ben Abdallah N., Mouhous Voyneau N., Denoeux T., “Using Dempster-Shafer theory to model uncertainty in climate change and environmental impact assess-ments”. the 16th International Conference on Infor-mation Fusion, FUSION 2013, Turkey (2013)
Benhamida F. Z., Challal Y., Koudil M. “ALLONE: A New Adaptive Failure Detector Model for Low-power Lossy Networks”, IEEE Global Communications Conference, IEEE GLOBECOM, USA (2013) [hal-00871191]
Bordes A., Usunier N., Garcia-Duran A., Weston J., Yakhnenko O. “Translating Embeddings for Modeling Multi-relational Data”, Advances in Neural Informa-tion Processing Systems, (NIPS), USA (2013) [hal-00920777]
Bordes J.-B., Davoine F., Xu P., Denoeux T. “Eviden-tial Grammars for Image Interpretation. Application to multimodal traffic scene understanding”, Third International Symposium on Integrated Uncertainty in Knowledge Modeling and Decision Making (Springer-Verlag LNCS), China (2013) [hal-00932897]
Bordes J.-B., Xu P., Davoine F., Zhao H., Denoeux T. “Information fusion and evidential grammars for ob-ject class segmentation” in the Fifth IROS Workshop on Planning, Perception and Navigation for Intelligent Vehicles, Japan (2013) [hal-00932899]

Labex MS2T Activity Report 2013-2014
Ap
pen
dic
es
Dao T.T. , Hoang T.N. , Ta X.H. , Ho Ba Tho M.C. “Knowledge-based Personalized Search Engine for the Web-based Human Musculoskeletal System Re-sources (HMSR) in Biomechanics”. Journal of Biome-dical Informatics 46 (1), (2013), 160-173
Doumiati M., Ghandour R., Charara A., Victorino A., Lechner D. “Design, experimental validation, and comparison of two model-based EKF observers for lateral vehicle dynamics estimation”, 21st Medi-terranean Conference on Control and Automation, (MED’13), Greece(2013) [hal-00989994 - version 1]
El Zoghby N., Cherfaoui V., Denoeux T. “Optimal ob-ject association from pairwise evidential mass func-tions”, the 16th International Conference on Informa-tion Fusion, Turkey (2013) [hal-00862245]
Fouquet Y., Nace D., Pioro M., Shinko I., “On pro-tected traffic routing in wireless networks with partial multiple link failures”, 8th International Conference on P2P, Parallel, Grid, Cloud and Internet Computing, 3PGCIC 2013, Compiègne, France (2013)
Kafi M. A., Challal Y., Djenouri D., Doudou M., Bouab-dallah A., Badache N. “A Study of Wireless Sensor Networks for Urban Traffic Monitoring: Applications and Architectures”, 4th International Conference on Ambient Systems, Networks and Technologies, Canada (2013) [hal-00920721]
Hoang T. N., Dao T.T., Denoeux T., Ho Ba Tho M.C.,“Belief-based Silhouette Index for Performance Analysis of Evidential Clustering Model for Clinical Decision Support System”. 1st International works-hop Labex MS2T, Compiegne, France (2013)
Hoang T.N., Dao T.T., Denoeux T., Ho Ba Tho M.C. “A Clustering Model for the Musculoskeletal Disorders with Fused Data from Multiple Sources”. 5th Interna-tional Conference on Computational Bioengineering, ICCB2013 Leuven, Belgium, (2013)
Hu X.-Q., Sévénié B., Salsac A.-V., Leclerc E., Bar-thès-Biesel D. “Characterization of membrane pro-perties of capsules flowing in a square-section micro-fluidic channel: effects of the membrane constitutive law”. Phys. Rev. E. 87, (2013)
Laforet, J., Boudaoud, S., Ayachi, F., Destercke, S., Marque, C. “Preliminary global sensitivity analysis of a striated muscle sEMG generation model”, 1st Inter-national Workshop Labex MS2T, Compiègne, France (2013)
X. Liang, J. Zhu, W. Zhang, P. Breitkopf, “An implicit model for the integrated optimization of component layout and structure topology”, Computer Methods in Applied Mechanics and Engineering, 257 (2013), 87–102, 2013
Liu X., Bordes A., Grandvalet Y. “Biomedical Event Extraction by Multi-class Classification of Pairs of Text Entities”, BioNLP Shared Task 2013 Workshop - BioNLP Shared Task 2013 Workshop, Bulgaria (2013) [hal-00880444]
Lounis, A., Hadjidj A., Bouabdallah A., Challal Y. “Sen-sor networks for emergency management”, Eighth International Conference on Broadband and Wireless Computing, Communication and Applications (BWC-CA-2013), Compiègne, France (2013)
Maalel N., Roux P., Kellil M., Bouabdallah A. “Adap-tive Reliable Routing Protocol for Wireless Sensor Networks”, the Ninth International Conference on Wi-reless and Mobile Communications - ICWMC 2013, France (2013) [hal-00863127]
Maalel N., Natalizio E., Bouabdallah A., Roux P., Kellil M. “Reliability for Emergency Applications in Internet of Things”, IEEE International Conference on Distri-buted Computing in Sensor Systems, DCOSS, USA (2013) [hal-00863169]
Natalizio E., Surace R., Loscri V., Guerriero F., Melodia T. “Two Families of Algorithms to Film Sport Events with Flying Robots”, 10th IEEE International Confe-rence on Mobile Ad-hoc and Sensor Systems (MASS), China (2013) [hal-00917521]
Pioro M., Nace D., Fouquet Y. “An Optimization Mo-del for Communication Networks with Partial Multiple Link Failure”, 5th International Workshop on Reliable Networks Design and Modeling, ICUMT 2013, - (2013) [hal-00944359]
Pioro M., Nace D., Fouquet Y. “On Protected Traffic Routing in Wireless Networks with Partial Multiple Link Failures”, 8th International Conference on Broadband and Wireless Computing, Communication and Appli-cations, BWCCA 2013, France (2013) [hal-00932706]
Qiu S., Sallak M., Schön W., Cherfi-Boulanger Z. “Epistemic parametric uncertainties in availability assessment of a Railway Signalling System using Monte Carlo simulation”, European Safety and Relia-bility Conference, ESREL 2013, Netherlands (2013) [hal-00877245]
Qiu S., Sallak M., Schön W., Cherfi Z. “Modélisation et évaluation de la disponibilité d’un système de signa-lisation ferroviaire ERTMS niveau 2”, QUALITA2013, France (2013) [hal-00823131]
Rault T., Bouabdallah A., Challal Y. “WSN Lifetime Optimization through Controlled Sink Mobility and Packet Bufferization”, 4th Global Information Infras-tructure and Networking Symposium, GIIS 2013, Italy (2013) [hal-00871203]
93
94 Labex MS2T Activity Report 2013-2014
Rault T., Bouabdallah A., Challal Y. “Multi-hop wire-less charging optimization in Low-Power Networks”, IEEE Global Communications Conference, IEEE GLO-BECOM, USA (2013) [hal-00871198]
Riahi A., Challal Y., Natalizio E., Chtourou Z., Bouab-dallah A. “A Systemic Approach for IoT Security”, IEEE International Conference on Distributed Com-puting in Sensor Systems - DCOSS, USA (2013) [hal-00868362]
Salsac A.-V., Hu X.-Q., Sévénié B., Leclerc E., Edwards-Lévy F., Barthès-Biesel D. “Flow of a mi-crocapsule suspension in a square microchannel: characterization of the capsule mechanical proper-ties”. Euromech Colloquium 544 Dense Flows of Soft Objects, Grenoble, France (2013)
Talj R., Tagne G., Charara A. “Immersion and Inva-riance Control for Lateral Dynamics of Autonomous Vehicles, with Experimental Validation” European Control Conference 2013, ECC’13, Zurich, Switzerland (2013)
Wang B., Victorino A., Charara A., Augsburg K., Hopping K. “Assessment of Rollover Stability Based on Risk Indicator Case study for an electric vehicle”, IEEE Symposium Series on Computational Intelli-gence, IEEE SSCI 2013, Singapore (2013)
Weston J., Bordes A., Yakhnenko O., Usunier N. “Connecting Language and Knowledge Bases with Embedding Models for Relation Extraction”, the 2013 Conference on Empirical Methods in Natural Lan-guage Processing, USA (2013) [hal-00880455]
Xu P., Davoine F, Denoeux T., and Bordes J-B, “Infor-mation fusion on oversegmented images: An applica-tion for urban scene understanding”, Thirteenth IAPR International Conference on Machine Vision Applica-tions Kyoto, MVA 2013, Japan, (2013)
Books and Book Chapters
Dao T T, Ho Ba Tho MC “Biomechanics of Muscu-loskeletal System: Modelling of Data Uncertainty and Knowledge” Ed. Wiley Publisher, England, 176 pages, (2014)
Destercke S., Dubois D. “Other uncertainty theories based on capacities”, In Introduction to Imprecise Probabilities, T. Augustin, Frank P. A. Coolen , Gert de Cooman, Matthias C. M. Troffaes , Ed. Wiley, (2014) 93-112 [hal-00999503]
Destercke S., Dubois D. “Special Cases”, In Introduc-tion to Imprecise Probabilities, T. Augustin, Frank P. A. Coolen , Gert de Cooman, Matthias C. M. Troffaes , Ed. Wiley, (2014) 79-91 [hal-00999488]
National Conference
Sévénié B., Salsac A.-V., Barthès-Biesel D. “Charac-terization of the capsule membrane properties in a microfluidic square channel: effect of a geometrical deviation”. Journées GDR3570 MECABIO (2014)
Xu P., Davoine F., Denoeux T. “Transformationcroyance”, RFIA 2014 - Reconnaissance de formes et intelligence artificielle, France (2014) [hal-00988584]
Qiu S., Sallak M., Schön W., Cherfi-Boulanger Z. “Modélisation et vérification de propriétés de sécu-rité d’une infrastructure ferroviaire à l’aide des Sta-techarts”, 19ème congrès de maîtrise des risques et sûreté de fonctionnement, Lambda Mu 19, France (2014) [hal-01060566]
Yu C., Bonnifait P., Cherfaoui V. “An Evidential Scheme for a Velodyne Ground Truth”, Workshop Perception for the Intelligent Vehicles, RFIA 2014, France (2014) [hal-01060913]
Saif O., Fantoni I. “Commande LQR d’une flotte de multiples véhicules aériens”, 5èmes Journées Doctorales / Journées Nationales MACS (JD-JN MACS), France (2013) [hal-00927095]
Saif O., Hou Z., Fantoni I., Sanahuja G. “Simulateur de flotte de drones”, 4èmes Journées Démonstrateurs, France (2013) [hal-00927086]

95Labex MS2T Activity Report 2013-2014
Appendix 7 - 1st International Workshop on “Systems of Systems inTechnology Foundations” - Program September 5-6, 2013 - Compiègne
8:309:00
Centre de Transfert UTC - Amphitheater COLCOMBETSeptember 5
WELCOME COFFEEOPENING CEREMONY
Alain Storck - President of UTCRaja Chatila - Scientific Deputy Director of INS2I, CNRS
Ali Charara - Head of the Labex MS2T
9:30 Mo JAMSHIDI - University of Texas at San Antonio, USA
10:15 Peter RUTHERFORD - Baxter Healthcare SA, CH
11:00 COFFEE BREAK
11:15 Roman SLOWINSKI - Poznan University of Technology, PL
12:00 Terje AVEN - University of Stavanger, NO
12:45 LUNCH
14:00 Michael HENSHAW - Loughborough University, UK
14:45 Serge FDIDA - University Pierre Marie Curie, FR
15:30 COFFEE BREAK
15:45 LABEX PRESENTATION - COMMENTED POSTER
17:0018:30
POSTER SESSION
2 BANQUET - CHATEAU DE COMPIEGNE
8:30
Centre de Transfert UTC - Amphitheater COLCOMBETSeptember 6
WELCOME COFFEE
9:00 Paco CHINESTA - Ecole Centrale de Nantes, FR
9:45 Lynne BILSTON - University of New South Wales, AUS
10:30 Olivier SIMONIN - INSA Lyon, FR
11:15 COFFEE BREAK
11:30 Ronan STEPHAN - ALSTOM, FR
12:15 Carlos MORENO - GDF, Suez, FR
13:30 LUNCH
14:30 Jean-Luc GARNIER - THALES Research and Technology, FR
15:15 Dominique LUZEAUX - DGA, Ministry Defense, FR
16:00 CLOSING WORKSHOP
16:3017:30
COFFEE BREAK

96 Labex MS2T Activity Report 2013-2014

97Labex MS2T Activity Report 2013-2014

98 Labex MS2T Activity Report 2013-2014

2 Labex MS2T Activity Report 2013-2014
Act
ivity
Rep
ort
201
3-20
14
99Labex MS2T Activity Report 2013-2014
Laboratory of ExcellenceLabex MS2T
Maîtrise des Systèmes de Systèmes Technologiques Control of Technological Systems of Systems
Contacts:Professor Ali ChararaDirector of Labex MS2T
Laurie HerlinAssistance steering and coordination Officer

www.labexms2t.fr
Activity ReportJuly 2013 - June 2014
Labex MS2TUniversité de Technologie de Compiègne - Centre de Recherches de Royallieu
CS 60319 - 60203 COMPIEGNE Cedex - FranceTél : +33 (0)3 44 23 46 37 - Fax : +33 (0)3 44 23 44 77 - [email protected]
Lab
ex M
S2T
Act
ivity
Rep
ort
Jul
y 20
13-J
une
2014


















