Active Sound and Vibration Control: theory and applications Volume 49 || ANC in three-dimensional...
32
Chapter 2 Actiye control of noise in three-dimensional propagation M. O. Tokhi 1 and K. Mamour 2 1 Department of Automatic Control and Systems Engineering The University of Sheffield, Sheffield, UK, Email: [email protected] 2 Renishaw, UK A coherent method for the analysis and design of active noise control sys- tems, in a three-dimensional nondispersive propagation medium, is presented in this chapter. An analysis of single-input single-output and single-input multi-output control structures is provided. Conditions for the robust oper- ation of such systems on the basis of optimum cancellation are determined. These include the physical extent of cancellation in the medium, relative sta- bility of the inherent feedback loop and controller design. These conditions are interpreted as constraints on the geometric compositions of the system. 2.1 Introduction Active noise control (ANC) uses the intentional superposition of acoustic waves to create a destructive interference pattern such that a reduction of the un- wanted sound occurs. This is realised by artificially generating cancelling (sec- ondary) source (s) of sound through detecting the unwanted (primary) noise and processing it by an electronic controller, so that when the secondary wave is superimposed on the primary wave the two destructively interfere and can- cellation occurs. In this manner, the interference of the component waves leads Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp
Transcript of Active Sound and Vibration Control: theory and applications Volume 49 || ANC in three-dimensional...

Chapter 2
Actiye control of noise inthree-dimensional propagation
M. O. Tokhi1 and K. Mamour21 Department of Automatic Control and Systems EngineeringThe University of Sheffield, Sheffield, UK, Email: [email protected] Renishaw, UK
A coherent method for the analysis and design of active noise control sys-tems, in a three-dimensional nondispersive propagation medium, is presentedin this chapter. An analysis of single-input single-output and single-inputmulti-output control structures is provided. Conditions for the robust oper-ation of such systems on the basis of optimum cancellation are determined.These include the physical extent of cancellation in the medium, relative sta-bility of the inherent feedback loop and controller design. These conditions areinterpreted as constraints on the geometric compositions of the system.
2.1 Introduction
Active noise control (ANC) uses the intentional superposition of acoustic wavesto create a destructive interference pattern such that a reduction of the un-wanted sound occurs. This is realised by artificially generating cancelling (sec-ondary) source (s) of sound through detecting the unwanted (primary) noiseand processing it by an electronic controller, so that when the secondary waveis superimposed on the primary wave the two destructively interfere and can-cellation occurs. In this manner, the interference of the component waves leads
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

26 Active Sound and Vibration Control
to a pattern of zones of cancellation and reinforcement in the medium; noiseis cancelled in some regions and reinforced in others. The physical extent ofzones of cancellation primarily depends upon the maximum frequency of thenoise and separation between the sources. For a given maximum frequencyof the noise, a reduction in the separation between the sources leads to anincrease in the physical extent of cancellation. This is limited in practice bythe physical dimensions of the sources. Moreover, the process of controller im-plementation, using analogue and/or digital techniques, can result in errors inrealising the amplitude and phase characteristics of the controller [172]. Sucherrors will affect the level and physical extent of cancellation. However, aproper design methodology incorporating a suitable geometrical arrangementof cancelling sources can lead to a significant improvement in the level as wellas physical extent of cancellation.
Acoustic feedback and reflected waves in an ANC system are found tosignificantly affect the performance of the system. This, incorporated withthe geometrical arrangement of system components, has a major impact onthe stability of the system and can lead to practical limitations in the designof the controller. Acoustic feedback, owing to reflected waves, is found toconfuse the controller as to the exact level of the noise itself. This leads tosystem instability and/or poor system performance in some frequency bands.To solve this problem, in the case of the one-dimensional duct noise, for exam-ple, attempts have been made to use loudspeaker/microphone arrays so thatthe detector microphone detects the unwanted noise only, and that to pro-vide a cancelling signal in the duct which propagates only in the downstreamdirection [2, 75, 174, 175, 286]. However, criteria based on relative stabilitymeasures of the system can lead to robust designs [302]. System geometryis also found to affect the practical realisation of the controller in an ANCsystem; certain geometrical arrangements of system components can lead torequiring the controller to have impractically large gains [299, 303].
The analysis and design presented in this chapter focus on the cancella-tion of noise of a compact source in a three-dimensional free-field propagation.These can be transformed and extended to cancellation of distributed sourcesand to other propagation media. The ANC system is realised within a single-input multi-output (SIMO) control structure for which the single-input single-output (SISO) structure is considered as a special case. The controller designrelations are developed in the frequency-domain. These can, equivalently, bethought of either in the complex frequency s-domain or the z-domain. Thecorresponding practical realisation of the controller is carried out either incontinuous-time or discrete-time using analogue or digital techniques accord-ingly.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 27
The analysis focuses on ANC systems in stationary (steady-state) con-ditions. This corresponds to an ANC system with a fixed controller of therequired characteristics under situations where substantial variations in thecharacteristics of the secondary source, transducers and other electronic equip-ment used do not occur. In an adaptive ANC system, this means that once asteady-state (stationary) condition has been reached the situation is equivalentto the case of the fixed controller. Therefore, in an adaptive ANC system theanalysis applies to periods where a steady-state condition has been reached andsubstantial parameter variations do not occur. The stability and convergenceof an adaptive controller in a time-varying (nonstationary/transient) nonlin-ear environment is difficult to analyse and guarantee. However, the problemof instability under such a situation can be avoided by designing a suitablesupervisory level control within the adaptive mechanism [300, 301].
2.2 Active noise control structure
A schematic diagram of an SIMO feedforward ANC structure is shown inFigure 2.1a. The primary source emits unwanted acoustic signals (noise) intothe medium. This is detected by the detector, processed by the controller andfed to a set of k secondary sources. The secondary signals, thus generated, aresuperimposed upon the unwanted noise so that the level of noise is reduced ata set of k observation points. The corresponding frequency-domain equivalentblock diagram of Figure 2.1a is shown in Figure 2.16, where:
E = 1 x 1 matrix representing transfer characteristics of the acoustic pathbetween the primary source and the detector
F = k x 1 matrix representing transfer characteristics of the acoustic pathsbetween the secondary sources and the detector
G = 1 x k matrix representing transfer characteristics of the acoustic pathsbetween the primary source and the observers
H = k x k matrix representing transfer characteristics of the acoustic pathsbetween the secondary sources and the observers
C = lxfc matrix representing transfer characteristics of the controller
L = k x k diagonal matrix representing transfer characteristics of the sec-ondary sources
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

28 Active Sound and Vibration Control
M = 1 x 1 matrix representing transfer characteristics of the detector
Mo = k x k diagonal matrix representing transfer characteristics of theobservers
\JD = 1 x 1 matrix representing the primary signal at the source point
YDO = 1 x k matrix representing the primary signal at the observation points
Uc = 1 x k matrix representing the secondary signals at the source points
Yco = 1 x it matrix representing the secondary signal at the observationpoints
UM = 1 x 1 matrix representing the detected signal
Yo = 1 x k matrix representing the combined primary and secondary signalsat the observation points
Note in Figure 2.1 that if the observation points coincide with the detectionpoint a feedback control structure (FBCS) is obtained. This type of structure,following Lueg's initial proposals [180], has been considered in numerous in-vestigations [30, 48, 229, 230, 231, 262, 299, 303, 314, 315]. The feedforwardcontrol structure (FFCS), however, is more popular and has been employed andinvestigated in one-dimensional as well as three-dimensional enclosed and freefields [58, 59, 86,132,170,172,180, 215, 218, 249, 251, 299, 300, 301, 302, 303].
The objective in Figure 2.1 is to reduce the level of noise to zero at the ob-servation points. This is the minimum variance design criterion in a stochasticenvironment, requiring the observed primary and secondary signals at eachobservation point to be equal in amplitudes and have a phase difference of180°, i.e.:
Yco = ~YDO (2.1)Using the block diagram in Figure 2.16, YDO and YCo can be expressed as:
YDO = VDG(2.2)
Yco = U D E M C L [ I - FMCL]-1!!
where I is the identity matrix. Substituting for Yoo and Yco from eqn. (2.2)into eqn. (2.1) and simplifying yields the required controller transfer functionas:
C = M^A^GH- 1 ! , - 1 (2.3)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 29
detector
observers
secondarysource
( a ) ,
( b ) ,
Figure 2.1 Active noise control structure: (a) Schematic diagram; (b) blockdiagram
where A is a 1 x 1 matrix given by:
A = GET^F - E (2.4)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

30 Active Sound and Vibration Control
This represents the required controller design relation for optimum cancella-tion of noise at the observation points.
2.3 Physical extent of cancellation
The interference of the component waves through a process of realisation ofan ANC system, effectively, leads to a pattern of zones of cancellation andreinforcement in the medium; noise is cancelled in some regions and reinforcedin others. The physical extent of zones of cancellation primarily depends uponthe maximum frequency of the noise and separation between the sources. Inpractice, the separation is limited by the physical dimensions of the sources. Inthis section an investigation into the effects of system geometry on the physicalextent of cancellation is presented.
A time-domain and a corresponding frequency-domain analysis of the pro-cess of phase cancellation leading to the basic conditions of cancellation havepreviously been considered [172, 174, 324]. A detailed parametric analysis andgeometric description of the process of cancellation on the basis of an SISOstructure has also been reported [305]. However, such an analysis and descrip-tion to incorporate a multiple-source configuration is not given. Moreover, theeffects of errors, resulting during an implementation process, on the physicalextent of cancellation has not been investigated. In this section, the processof field cancellation from a frequency-domain viewpoint so that the analysis,for single tones of the component waves, provides a quantitative measure ofthe degree of cancellation in terms of amplitude and phase parameters of thewaves, is given. In the case of broadband noise this provides relationships forthe degree of cancellation as a function of frequency. The degree of cancellationis analysed in relation to source-related and geometry-related parameters ofthe system leading to a three-dimensional description of the pattern of cancel-lation and reinforcement in the medium. The description is initially providedon the basis of optimum cancellation at a finite set of observation points, andthen extended to incorporate implementation errors in the controller.
2.3.1 The field cancellation factor
Consider the primary point source in Figure 2.1 emitting a wave uD(t), asfunction of time t, and the set of k secondary sources, located at distances r2-(i = 1,2,..., k) relative to the primary source, emitting waves uci(t) into themedium, respectively. In propagating through a distance rgq, the wave uo(t)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 31
results in a wave yDq(t) at an arbitrary point q. Similarly, in propagatingthrough a distance r^g, the secondary wave ua(t) results in a wave yaq(i)at the arbitrary point. Let the resultant field owing to the superposition ofthe primary and secondary waves at the point be denoted by yq(t). With urepresenting the radian frequency, let:
UD(JU/) = 1 X 1 matrix representing unit) in the frequency domain,
YDQUU) = 1 X 1 matrix representing yoq(t) in the frequency domain
C?̂ ) = lxfc matrix representing uc(t) = {uCi(t)} (i; = 1,2,..., k) in thefrequency domain
ju;) = the signal yq(t) in the frequency domain
{u)) = the autopower spectral density of yDq{t)
Syyq(u) = the autopower spectral density of yq(t)
gq(juj) = the transfer characteristics of the acoustic path through rgq
hq(juj) = A x l matrix, {hiq(juj)}, representing the transfer characteristics ofthe acoustic paths through { r ^ } (i = 1,2,..., k)
The transfer functions gq(jw) and hiq(juj) for the propagation medium underconsideration are given by:
(2.5)
Thiq
where A is a constant and c is the speed of sound in the medium.The autopower spectral densities of yDq(t) and yq(t) can be written as
[43, 276]:
(2.6)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

32 Active Sound and Vibration Control
Note that for cancellation of the primary wave to occur at the arbitrary pointq the condition
Sm(w) < SyyDq{u) (2.7)
must be satisfied.For a quantitative description of cancellation, the field cancellation factor
K is defined as the ratio of the cancelled spectrum SyyDq(uj) - Syyq(uj) to theprimary spectrum SyyDq(w) that existed at the point prior to the superpositionof the secondary waves with the primary wave [172, 305]:
It follows from eqns (2.7) and (2.8) that, for the primary wave to be cancelled,K must be between zero and unity:
0 < K < 1 (2.9)
where K = 1 corresponds to complete (optimum) cancellation, K = 0 cor-responds to no cancellation and if K < 0 then the situation corresponds toreinforcing the primary wave.
Substituting for SyyDq{w) and Syyq(uj) from eqns (2.6) into eqn. (2.8), usingeqn. (2.5) and simplifying yields:
(2-10)
where a* is the power ratio of the secondary signal yaq(t) over the primarysignal yDq(t), A is the cross-spectral density factor between yaq(t) and yDq(i)and fa is the cross-spectral density factor between the secondary signals yaq{t)
(uj) _(rg\2
v) \rhiJSuug(u)SuuD(U)
where Syyaq(u}), SyyDq(u), Suua{oj) and S^/^a;) represent the autopowerspectral densities of yaq{t), yDq(i), ua{t) and un(t), respectively, and 9i(w)and Oj(uj) are the angles by which the secondary signals yaq(t) and ycjq(t),
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 33
respectively, lead the primary signal yDq(t)- Note that as% represents the powerratio of the secondary signal Ua{t) over the primary signal uo(t) at the source(before propagation) whereas a» is the corresponding power ratio at the arbi-trary point q.
Eqn. (2.10) gives a quantitative measure of the degree of cancellation interms of the power ratios, interpreted as the relative amplitudes, and the cross-spectral density factors, interpreted as the relative phases, of the componentwaves. Note that the first summation on the right-hand side of this equation isdue to the interference of the secondary fields with the primary field whereasthe double summation term is due to the interference of the secondary fieldswith one another. Thus, for cancellation of the primary wave to be achievedat a point in the medium, the amplitudes and phases of the secondary wavesshould be adjusted relative to the primary wave such that the condition ineqn. (2.9) is satisfied.
2.3.2 Three-dimensional description of cancellation
Realisation of the required continuous frequency-dependent controller charac-teristics given in eqn. (2.3) within the ANC system of Figure 2.1 will ensurecancellation of the noise at and in the vicinity of all the observation points. Inthis manner, a region of cancellation is created around each observation point.Further away from these points, due, in principle, to a redistribution of thesound energy in the medium, cancellation will decrease and even reinforcementwill occur. An investigation of the level and physical extent of cancellationaround the observation points in relation to the number of cancelling sources,geometrical arrangement of system components and extent of errors in therealisation of the required controller is given in this Section.
Consider that the realisation of the controller transfer characteristics inFigure 2.1 accurately conforms to the design rule in eqn. (2.3). Using theblock diagram in Figure 2.16, the secondary signal JJc can be obtained as:
U c = UDEMCL [I - F M C L ] 1 (2.11)
Substituting for C from eqn. (2.3) into eqn. (2.11), using eqn. (2.4) andsimplifying, s = ju, yields:
Uctfw) = -UD(jo;)G(ja;)H-1(ja;) (2.12)
Substituting for Uc(jw) from eqn. (2.12) into eqn. (2.6), simplifying andusing eqn. (2.8) yields the cancellation factor K at the arbitrary point q in
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

34 Active Sound and Vibration Control
the medium as:
K = 1 - 1 + gr1(i^)G0'o;)H"1(ia;)hg(ia;)(2 (2.13)
Eqn. (2.13) gives a quantitative measure of the degree of cancellation achievedwith the ANC system at the arbitrary point q, under stationary (steady-state)conditions. It follows from this equation that, if no error is involved in imple-menting the controller, then the resultant cancellation at an arbitrary point inthe medium is dependent only on the transfer characteristics of the acousticpaths from the primary and secondary sources to the observation points andto the arbitrary point in question. Therefore, for a given primary wave theamount and physical extent of cancellation is described by the geometricalarrangement of the sources and observers. A three-dimensional description ofthe pattern of zones of cancellation and reinforcement can thus be obtainedby measuring/calculating the cancellation factor K for given noise frequencyand system geometry using eqn. (2.13).
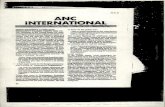
A two-dimensional description of the interference pattern created by anSISO ANC structure with the primary source situated at point P, emitting asignal of wavelength A, and the secondary source at point S is shown in Figure2.2. The detector is situated at point E, and the controller is designed foroptimum cancellation to be achieved at the observation point O. The axesare graduated in the wavelength A. The curves represent contours of constantK and, thus, show the relative noise power after cancellation; e.g. the curveK = 0.5 shows the locus of points at which the noise is reduced by 50 percent whereas the curve K = —2 shows the locus of points at which the noiseis reinforced by 200 per cent. The curve K = 0 is the boundary betweenzones of cancellation (0 < K < 1) and reinforcement (K < 0). Note thatat the observation point K is unity, corresponding to optimum cancellation,whereas at the location of the secondary source K is — oo, corresponding tomaximum reinforcement. Figures 2.2a and 2.26 correspond to the same geo-metric configuration of system components, with the separation between thesources reduced from 0.5A in Figure 2.2a to 0.2A in Figure 2.26. It is notedthat the physical extent of cancellation is significantly larger in Figure 2.26than that in Figure 2.2a. This is due to the reduction in the spacing betweenthe sources. The separation between the sources in Figure 2.2c is the same asthat in Figure 2.2a. The observation point in Figure 2.2c, however, is locatedat point (—0.5A, 0). It is noted that the physical extent of cancellation aroundthe observation point is significantly smaller in Figure 2.2c as compared tothat in Figure 2.2a. Moreover, the overall level of noise in Figure 2.2c is no-ticeably higher than that in Figure 2.2a. This has resulted from moving the
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 35
observation point closer to the primary source and, relatively, away from thesecondary source. The reverse situation will hold if the observation point ismoved away from the primary source and, relatively, closer to the secondarysource. It follows from the above that moving the observation point furtheraway from the secondary source (relatively closer to the primary source) willlead to an overall increase in the level of noise in the medium and a reduc-tion in the physical extent of cancellation around the observation point. Athree-dimensional description of the patterns in Figure 2.2 can be obtained byrevolving each diagram around a horizontal axis passing through the origin. Inthis manner, the relative levels of the noise within the regions of cancellationand reinforcement can be visualised.
To demonstrate the effect of employing additional secondary sources onthe physical extent of cancellation, consider the ANC system with an SIMOcontrol structure incorporating two secondary sources. A two-dimensional de-scription of the interference pattern created with a primary source at P(0,0),emitting a signal of wavelength A, and two secondary sources at points 5, isshown in Figure 2.3. The detector is situated at point U, and the controlleris designed for optimum cancellation to be achieved at the two observationpoints indicated by O. Comparing the patterns in Figures 2.3a and 2.36 withthose in Figures 2.2a and 2.26, respectively, where the separations between theprimary source and each secondary source are 0.5A and 0.2A, reveals that theoverall physical extent of cancellation around the observation points is signifi-cantly larger in Figures 2.3a and 2.36 than that in Figures 2.2a and 2.26. Thisis achieved by incorporating an additional secondary source into the system.With the arrangement in Figure 2.3c, the resulting physical extent of cancel-lation around the observation points is still comparable to that in Figure 2.3a.However, by adopting the arrangement in Figure 2.3d, the physical extent ofcancellation achieved around the observation points has increased significantly.A three-dimensional description of the patterns in Figure 2.3 can be obtainedby revolving each about a straight line passing midway between the two ob-servation points accordingly.
The results presented in Figures 2 and 3 are based on the assumption thatthe controller characteristics are free of errors. In practice, however, the pro-cess of controller implementation, using analogue and/or digital techniques,introduces errors in the amplitude and phase of the controller [170, 172]. Sucherrors will affect the amount and, hence, the physical extent of cancellation toa lessor or greater degree, depending on the extent of the error involved. Thisissue is addressed in the remainder of this Section.
Let the relative amplitude and phase errors introduced in the controllertransfer function through the implementation process be represented by a k x k
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

36 Active Sound and Vibration Control
3
2
| 0
~ 3 - 3 - 2 - 1 0 1 2 3
Distance (wavelength)
(a) (£(-0.25A,0.0625A),O(0,A),P(-0.25A,0),S(0.25A,0)
/
X\s
I\
s,/,
{\
)\)l'I1
1 0.5/0/
I/A\\\
7/
V
/
)
\
3
2
| 0
5 -2
- 3 - 2 - 1 0 1 2 3Distance (wavelength)
(b) (£(-0.1A,0.0625A),O(0,A),P(~0.1A,0),5(0.1A,0)
\o.s\
/
/
V/
K=1
/
\
o . /
/ ^
\
-3 -2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5 2
Distance (wavelength)
(c) (£(-0.25A,0.0625A), 0(-O.5A,0),P(-0.25A,0), 5(0.25A,0)
Figure 2.2 Interference pattern with an SISO ANC system, incorporating theoptimal contoroller
diagonal matrix Ce- Thus, the transfer characteristics of the controller as im-plemented in Figure 2.1 will be equivalent to:
c = M-1 [GH^F - E] X GET1: (2.14)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 37
Substituting for C from eqn. (2.14) into eqn. (2.11) and simplifying yields
UCCJW) = -UD(jo0G(ju,)H-V)T(ju>) (2.15)
where T is a 1 x k matrix given by:
T = [i - F(GH"1F - E^GH"1] Ce[l - F(GH"1F -
and I is the identity matrix.Substituting for Uc(Ju) from eqn. (2.15) into eqn. (2.6), simplifying and
using eqn. (2.8) yields the cancellation factor K at the arbitrary point q inthe medium as:
Eqn. (2.16) gives a quantitative measure of the degree of cancellation achievedwith the ANC system, under stationary (steady-state) conditions. The amountof cancellation is dependent on the system geometry and accuracy in imple-mentation of the controller. A three-dimensional description of the pattern ofzones of cancellation and reinforcement can thus be obtained by calculatingthe cancellation factor K for given primary wave and system geometry.
Figure 2.4a shows the interference pattern corresponding to the systemin Figure 2.3c, for Ce = acexp(j^c)I with ac = 0.8 and <j>c = —30°. It isnoted that with this error the system is tuned to achieve optimum cancella-tion at points different from the observation points. Revolution of the diagramabout a line passing midway between the observation points will result in thecorresponding three-dimensional description. The cancellation factor K cor-responding to this system, at the observation points, as a function of theamplitude error ac and phase error (f>c is shown in Figure 2.46. It is noted thatthe error tolerance in the controller phase increases with decreasing ac. For thesituation in Figure 2.4a, cancellation can still be achieved at the observationpoints for -80° <(/>c< 60°.
Eqn. (2.16) can be used to determine the extent of the error in controllerrealisation that can be tolerated for cancellation to be achieved at the obser-vation point(s). In this manner, with cei = a ^ e x p ^ ^ ) representing the errorin controller element Cj, the amplitude error ac% and phase error <£« can betolerated as long as K > 0 at the observation point(s). Note in Figure 2.46that for 0 < ac < 1 the tolerance in (j)c increases by decreasing the value ofac. This decrease in ac also results in a decrease in the maximum amount ofcancellation achievable at the observation point.
Substituting for K from eqn. (2.16) into eqn. (2.9) and simplifying, foran ANC system with a single secondary source, reveals that for cancellation to
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

38 Active Sound and Vibration Control
3
_ 2
| 0
CD
8 -1&<n
5 -2
-3- 3 - 2 - 1 0 1 2 3
Distance (wavelength)
(a) 0(-O.25A,A),0(O.25A,A),S(-0.5A,0),S(0.5A,0)
> < \yri\o\
~5fy .
%?.///
K = 0.5 0.5;
m%
—T5
1$
X" -4
10.8
0.4
0.2 0.5
s)
1
o1
1
K = 0.5
g -0.2S -0.4«-0.6
-0.8
~-2 -1.5 -1 -0.5 0 0.5 1 1.5 2Distance (wavelength)
(b)O(-0.2A,A),O(0.2,A),(-0.2A,0),S(0.2A,0)
| 0
5 -2 1 / /
-3 - 2 - 1 0 1 2 3Distance (wavelength)
(c) 0( -A, A), O(A, A),5(-0.5A, 0), S(0.5A, 0)
3
_ 2
1 °———zl
/
K = 0.5
1 — - — _
/
/
1
7,//
1
[̂\
. — • — -
\
—
\
- 3 - 2 - 1 0 1 2 3Distance (wavelength)
Figure 2.3 Interference pattern with an SIMO ANC system incorporatingthe optimal controller, with the primary source at P(0,0) andthe detector at 15(0,0.0625A).
be achieved at the observation point the amplitude and phase errors (ac and<t>c) in controller realisation should satisfy the relation:
0 < ac < 2 cos <t>c (2.17)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 39
K =1
1
< >
0
t
/ /
0n71
X
V
/,//
V
1//o
\ >
1
1
1
0.8
0.6
0.4
0.2C 0
-0.2
-0.4
-0.6
-0.8
-1
/ /
' / // / /
/ / /
/AJfn /I i
Ii
V 0.25^
A/
r\
- \ \\\\\\
\\\\\\\\\\\\\\\
-2.5-2-1.5-1-0.5 0 0.5 1 1.5 2 2.5Distance (wavelength)
(a) Interference pattern with ac = 0.8,<t>c = -30°
-150 -100 -50 0 50 100 150phase error (degree)
(b) K as function of error
Figure 2.4 Effect of error in controler characteristics on degree of can-cellation; with £(0,0.0625A), O(-A,A), 0(A,A), P(0,0),S(-0.5A,0), S(0.5A,0).
It further follows from eqn. (2.17) that for ac to be positive, cos^c should bepositive, or:
7T
Thus, for cancellation to be achieved at the observation point, the phase error<j)c should stay within ±TT/2 and the amplitude error ac should satisfy eqn.(2.17). This can be extended to multiple-source ANC systems in a similarmanner as above.
It follows from the descriptions presented above that a decrease in eitherthe frequency or separation between the sources leads to an increase in thephysical extent of cancellation. Moreover, the extent of cancellation is con-siderably affected by the geometrical arrangement of sources and observers.Furthermore, errors in the controller transfer function result in a reduction inthe level of cancellation (or even lead to noise reinforcement) at the observa-tion point (s).
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

40 Active Sound and Vibration Control
2.4 Limitations in the controller design
It follows from eqn. (2.3) that, for given detector and secondary sources withnecessary electronic components, the controller characteristics required for op-timum cancellation at the observation points are dependent on the character-istics of the acoustic paths from the primary and secondary sources to thedetection and observation points. In particular, if the set of detection andobservation points is such that A in eqn. (2.3) becomes zero then the criticalsituation of the infinite-gain controller (IGC) requirement arises. The locusof such points in the medium (as a practical limitation in the design of thecontroller) is, therefore, of crucial interest.
Under the situation of the IGC requirement eqn. (2.4), for s = ju, can bewritten as:
A(JUJ) = G(ia;)H-1(ja;)F(ja;) - E(ju) = 0 (2.18)
where E(ja;), F(ju)), G(JUJ) and H(JCJ) represent the frequency responses ofthe corresponding acoustic paths in Figure 2.1. Note that eqn. (2.18) is givenin terms of the characteristics of the acoustic paths in the system. This impliesthat the IGC requirement is a geometry-related problem in an ANC system.Therefore, an analysis of eqn. (2.18) will lead to the identification of loci of(detection and observation) points in the medium for which the IGC require-ment holds. To obtain a solution for eqn. (2.18), an SISO system is consideredfirst. The results obtained are then used and extended to the SIMO ANC sys-tem.
2.4-1 Single-input single-output structure
Let the ANC system in Figure 2.1 incorporate a single secondary source (k = 1)and the functions E(ju;), F(juj), G(JUJ) and H(ju/), in this case, be denotedby e(ju), f(jcj), g(jw) and h(ju;) with the associated distances as re, r/, r9
and rh, respectively:
re r/(2.19)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 41
where A is a constant. Substituting for E(jo;), F(juj), G(ju) and H(ju) fromeqn. (2.19) into eqn. (2.18) and simplifying yields:
Th
This equation is true if and only if the amplitudes as well as the exponents(phases) on either side of the equation are equal. Equating the amplitudesand the phases, accordingly, yields:
7±=7l = a , rf-re = rh-r9 (2.20)
where a is a positive real number representing the distance ratio. Eqn. (2.20)defines the locus of points for which A(JCJ) = 0 and the controller is requiredto have an infinitely large gain. Note that this equation is in terms of thedistances re, rf, rg and rh only. Therefore, the critical situation of the IGCrequirement is determined only by the locations of the detector and observerrelative to the primary and secondary sources.
Eliminating r / and rh in eqn. (2.20) and simplifying yields:
re(a-l) = r9(a-l) (2.21)
Two possible situations, namely a = 1 and a ̂ 1, can be considered separately.For a unity distance ratio eqn. (2.21) yields the identity 0 = 0. Therefore,
substituting for a = 1 into eqn. (2.20) yields the locus of points for IGCrequirement as:
— = 1 and ^ = 1 (2.22)77 rh
If the locations of the primary and secondary sources are fixed then eachrelation in eqn. (2.22) defines a plane surface perpendicularly bisecting theline joining the locations of the primary and secondary sources [305]. Thisplane for the primary and secondary sources located at points P(0,0,0) andS(u$, vs, ws), respectively, with a distance r apart in a three-dimensional UVWspace is given by:
2u3) \2vJ \2wsJ
which intersects the C/, V and W axes at points (^~,O,o), (o, ^ , o ) and
(0,0, ~A, respectively. If both the detector and the observer are on this
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

42 Active Sound and Vibration Control
plane (the IGC plane), then the critical situation of eqn. (2.18) arises and thecontroller is required to have an infinitely large gain for optimum cancellationto be achieved at the observation point.
For a nonunity distance ratio, eqns (2.20) and (2.21) yield:
I i = a , ^ = a , and ^ = 1 (2.23)rf rh rg
Each of the first two relations in eqn. (2.23) describes a spherical surface [305].These surfaces for the primary and secondary sources located, respectively, atP(0,0,0) and S(us,vs,ws) are defined by:
a2us ] \ [ ^ a\ I2 [ a2ws f [ ar fl_ o a | ^ |" l - a 2 i ' r l - a 2 | U-a2J
(2.24)which has a radius R = yx~2T and centre along the line PS at point:
/ a2us a2vs a2ws
The third relation in eqn. (2.24) requires the equality of the distances re andrg. The locus of such points in the three-dimensional UVW space (for, say,constant re) is a sphere with radius equal to re and centre at the location ofthe primary source:
u2 + v
2 4. w2 ~ r2 (2.25)
Therefore, the locus of points defined by eqn. (2.23) is given by the intersectionof the two spheres in eqns (2.24) and (2.25). Such an intersection results ina circle (the IGC circle) located in a plane, which is at right angles with theline joining the centres of the spheres. The centre of the circle is the point ofintersection of the plane and the line.
Manipulating eqns (2.24) and (2.25) yields the plane of the IGC circle as
\Ua) \V3) \WS
where
Eqn. (2.26) defines a plane surface on which the IGC circle is residing. It canbe shown that the line PS is at right angles with the plane of the IGC circle
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 43
[305].The quantity B in eqn. (2.27) gives a measure of the intersection of the
plane in eqn. (2.26) with the coordinate axes and, thereby, with the line PS.It is evident from eqn. (2.27) that B is dependent on r, re and 77 or, forconstant r, is dependent on the location of the detector only. If 9 denotes theangle between the lines PE and PS in a plane formed by these lines, whereE denotes the location of the detector, then the following holds:
r2f=r2 + r2
e-2rercos9 (2.28)
Substituting for r2 from eqn. (2.28) into eqn. (2.27) yields:
B = rre cos 9
Therefore, as the detection point varies the limits for B are found to be:
|B| < rer
The radius re of the IGC circle, accordingly, is given by:
rc = resin0 , 0 < 9 < TT
Thus, the maximum value rc max of the radius is re and occurs when the planeof the IGC circle intersects the line PS at point P. Movement of the planeto either side of point P will lead to a decrease in the radius. At the extremecases where the line PE is aligned with the line PS (9 is either 0° or 180°)the radius rc is zero. In general, for constant values of the angle 9 the radiusrc is directly proportional to the distance re between the primary source andthe detector. This implies that for rc to be minimised the detector is requiredto be placed as close to the primary source as possible.
It follows from the above that the requirement of an infinitely large gaincontroller is directly linked with the locations of the detector and the observerrelative to the primary and secondary sources. This derives from the depen-dence of the controller characteristics on the transfer characteristics of theacoustic paths from the detector and observer to the primary and secondarysources which demand a particular controller transfer function for a particu-lar set of detection and observation points in the medium. The above analysisreveals that certain sets of detection and observation points in the medium ex-ist, which for optimum cancellation require the controller to have an infinitelylarge gain. These form the loci of the IGC requirement as follows
(i) If the detector and observer are equidistant from the sources the locus is aplane surface, which perpendicularly bisects the line joining the locationsof the primary and secondary sources.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

44 Active Sound and Vibration Control
(ii) If the detector and observer are not equidistant from the sources thelocus is a circle, with centre along the line PS joining the locations ofthe primary and secondary sources, and on a plane that is parallel withthat in (i). The radius of the circle is equal to the distance between thedetector and the line PS.
Note in Figure 2.1a that if the observer and the detector coincide with oneanother then the FBCS is obtained. In such a process the distances rg and r^effectively become equal to the distances re and 77, respectively. This in termsof the transfer functions E, F, G and H and the distances re, rf, rg and r^corresponds to:
rg = re or G = E
(2.29)7̂ = 77 or H = F
Projecting the above into the controller design relation in eqn. (2.3), the cor-responding controller design relation for the FBCS is obtained.
Substituting for G and H from eqn. (2.29) into eqn. (2.4) and simplifyingyields A = 0 corresponding to the critical situation of the IGC requirementdiscussed above. Therefore, for optimum cancellation of noise, the FBCS willalways require a controller with an infinitely large gain. With a practicallyacceptable compromise between system performance and controller gain, andcareful consideration of system stability, reasonable amounts of cancellation ofthe noise can be achieved with this structure.
2.4-2 Single-input multi-output structure
Let the ANC system in Figure 2.1 incorporate k secondary sources. Thus,the controller transfer characteristics, C, in eqn. (2.3) will represent a 1 x kmatrix:
C = [ c L c 2 ... c
where c$ (i = 1,2,..., k) represents the required controller transfer functionalong the secondary path from the detector to secondary source i. In thismanner, the controller is realised in an SIMO form. Let the functionsF(juj), G(ju) and H(ju) be represented as:
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

where
¥(ju) =
ANC in three-dimensional propagation 45
f a ( j w ) ••• (2.30)
••• lhkfju)
ju) = —e J<=rc , fi(jo;) = —e
(2.31)
i = 1,2,..., fc, m = 1,2,..., fc, A is a constant and re, r/i, r9̂ and r^m arethe distances of the acoustic paths with transfer characteristics e(ju), ft(jo?),gi(jo;) and lijm(ju>), respectively. Substituting for E(ja;), F(j<j), G(JCJ) andH(jo;) from eqn. (2.30) into eqn. (2.18) and manipulating yields the set ofsolutions:
e Si §2 gfcm = l , 2 , . . . , * (2.32)
-~ = -~L- = -~- = . . . = —~- , i ^ mft "«i ^ hijb
Substituting for the functions in eqn. (2.32) from eqn. (2.31) accordingly andsimplifying yields:
Thi2
, i = l , 2 , . . . , * (2.33)
— re =
and
= rhm2 - r w 2 = . . - = - rhik
m = 1,2,...,*^ m (2.34)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

46 Active Sound and Vibration Control
where a,- and a\m are positive real numbers representing distance ratios. Eqns.(2.33) and (2.34) define the loci of detection and observation points for whichA(ju) = 0 and the controller, for optimum cancellation of noise at the ob-servation points, is required to have an infinitely large gain in each secondarypath.
Eqn. (2.33) describes the locus of detection and observation points relativeto the location of the primary source and secondary source % (i = 1,2,..., fc).It follows from the analysis presented above that, if the primary source andsecondary source i are located at points P and S$, respectively, in the medium,then the locus for unity distance ratio (a« = 1) is a plane perpendicularly bi-secting the line PS{. However, if a% ^ 1 the locus is a circle, with centre alonga straight line joining points P and Si in a plane, which is at right angles withthis line. The radius of the circle r^ is given by:
rCi = re sin 0j , 0 < 0,- < n
where, assuming that the detector is located at point E in the medium, Qi isthe angle between the lines PE and PSi in a plane formed by these lines.
Eqn. (2.34) describes the locus of detection and observation points relativeto secondary sources i (i = 1,2,..., k) and m (m = 1,2,..., k), located atpoints Si and Sm respectively. In this case, as follows from the previous anal-ysis, the locus, for unity distance ratio (a«m = 1), is a plane perpendicularlybisecting the line SiSm. For a nonunity distance ratio (a^m -̂ 1), however, thelocus is a circle, with centre along a straight line joining the points Si and Sm,in a plane that is at right angles with this line. The radius rcim of this circleis given by:
Tdm = Tfi Sin 6im , 0 < 9im < 7T
where, assuming the detector is located at point E, Qim is the angle betweenthe lines SiE and 5«5m.
It follows from the above that in an SIMO ANC system the locus of de-tection and observation points leading to the IGC requirement is defined inrelation to the locations of the primary source considered with each secondarysource as well as each secondary source considered with any other secondarysource. In this manner, for a system with k secondary sources a total of £*=1 ipairs of sources can be identified. Among these, the primary source consid-ered with each secondary source leads to k pairs, whereas the remaining £*=1 ipairs are formed by considering the secondary sources with one another. Ineach case, assuming the two sources in question are located at points X andF, the following two situations lead to the IGC requirement:
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 47
(i) When the detector and all observers are equidistant from points X andY. This defines the locus of detection and observation points as a plane(the IGC plane), which perpendicularly bisects the line XY.
(it) When the distance ratios from point X to the detector and observerm (m = 1,2,..., k) and to each pair of observation points as well asthe distance ratios from point Y to the detector and observer m (m =1,2,...,/;) and to each pair of observation points are each equal to unity.This defines the locus of detection and observation points as a circle (theIGC circle), with centre along a straight line passing through points Xand Y, on a plane, which is at right angles with this line.
Note that in an FBCS, where both the detection and observation points co-incide with one another, the situation described in (i) above corresponds tothe detection point being on the IGC plane. In an FFCS, however, this cor-responds to the situation when the detection point and all the observationpoints are on the IGC plane. With the situation described in (it), on the otherhand, an FBCS always satisfies the requirement. In an FFCS, however, it ispossible to minimise the region of space occupied by the IGC circle by a propergeometrical arrangement of system components.
2.5 System stability
As noted in Figure 2.1, the secondary signals reaching the detection pointform (positive) feedback loops, which can cause the system to become unstable.Therefore, an analysis of the system from a stability point of view is importantat a design stage. For practical systems a measure of absolute stability is notuseful; a system that has an extremely long and oscillatory transient responseis unlikely to be accepted. In this respect, a measure of relative stability canprovide a more acceptable design criterion. This can be achieved, throughthe utilisation of the Nyquist's stability criterion, in terms of gain and phasemargins.
Substituting for C from eqn. (2.3) into eqn. (2.11) and simplifying yields:
This is the closed-loop system equation between Up and Uc with the charac-teristic equation, using eqn. (2.4), given as:
Ch.Eq = I - F [GH^F - E] ~l GET1 (2.35)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

48 Active Sound and Vibration Control
Eqn. (2.35) is the required relation for analysing the system from a stabilityviewpoint. Note that this is expressed in terms of the transfer characteristicsof the acoustic paths in Figure 2.1. Therefore, the stability of the systemis affected by the geometrical arrangement of system components. To explorethis further, and for simplicity purposes, the system in Figure 2.1 is consideredwithin an SISO structure. Thus, substituting for the functions E, F, G andH in eqn. (2.35) as e, f, g and h respectively and simplifying yields:
whereX = - ^ — (2.36)
fe1
Thus, according to the Nyquist stability criterion, for s = jfcj, the stability ofthe system is expressed in terms of the polar plot of the frequency responsefunction X(juj). If this is represented in terms of a magnitude B(w) and aphase 9{oS) as:
^ ) (2.37)
Then, for the system to be stable the magnitude of X(juj), at some frequencyu for which 0(UJ) = —(2n + 1)TT (n = 0,1,...), should be less than unity [63]:
B(LJ) < 1 when 0(u) = -(2n-f 1)TT , n = 0, l , . . . (2.38)
where the negative angle (clockwise) indicates the direction of approach to-wards the 7T axis on a polar plot of X.(ju>). This can be expressed graphicallyby following the polar plot of X(JOJ) from UJ = 0 to UJ = oo and observing eachcrossing of the TT axis. If the point 1 lies on the left-hand side then the systemis considered to be stable, whereas if the point 1 lies on the right-hand sidethen the system is unstable.
The gain margin of the closed-loop system is defined, at some frequencyw for which the phase 9(UJ) is 180°, as the additional gain kg for the systemto become unstable. In terms of the amplitude transfer function B(w), kg isgiven as:
k9 = —-r when 9(u) = ~TT (2.39)
Thus, it follows from eqns (2.38) and (2.39) that for a system to be stable thegain margin kg must be greater than unity. A gain margin less than unity willmean that the system is unstable.
The phase margin of the closed-loop system is defined, at some frequency
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 49
u for which B(u) = 1, as the additional phase kg that is required to make thesystem unstable. This in terms of the phase 9(u) is given by:
k$ = 0(u) + 7T when B(w) = 1 (2.40)
Thus, it follows from eqns. (2.38) and (2.40) that the phase margin k$ ata frequency w for which J3(u;) = 1 is the amount of phase shift that wouldjust produce instability. For minimum-phase systems to be stable the phasemargin must be positive. A negative phase margin will mean that the systemis unstable.
Substituting for e, f, g and h, for s = jw, from eqn. (2.19) into eqn. (2.36),simplifying and using eqn. (2.37) yields B(w) and 0(UJ) as:
B{w) =
(2.41)
9{u}) = tan- f W*»M>u
where
(2.42)
with re/ = r/ — re, r ^ =zrh — rg and A represents the signal wavelength.Eqn. (2.42) gives the magnitude <5(CJ) and the phase <£(a;) in terms of
the distances from the detection and observation points to the primary andsecondary sources and the signal wavelength only. Using these relations thestability of the ANC system can be determined in terms of the locations ofthe detector and observer with respect to the primary and secondary sourcesin the three-dimensional propagation medium.
2.5.1 Gain margin
Substituting for B{oS) from eqn. (2.41) into eqn. (2.39) and simplifying yields:
N _ f (2n + 1)TT for Q(u) > 1 n - 0 ±1^ ^ "" I n?r for 0 < Q(o?) < 1 ' n ~ ' ' ' "
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

50 Active Sound and Vibration Control
Substituting for <j){uS) from eqn. (2.42) into eqn. (2.43) and simplifying yields:
)* for Q(u)>l, n = 0 ,± l , . . . (2.44)
for 0 < Q{u) < 1
Eqns (2.43) and (2.44) give the necessary conditions under which 9{oS) = 180°and, thus, the gain margin kg is given by eqn. (2.39). Substituting for <t*(u))according to eqn. (2.43) into eqn. (2.41), using eqn. (2.39) and simplifyingyields the gain margin as:
1 - Q(w) for <f>(u) = 2mr and 0 < Q(u) < 1 _ n o-i1 4- Q\u)) tor <p(u)) = (2n 4- 1)TT and v(CJJ > 0
(2.45)To find the specified regions in a three-dimensional UVW space with theprimary source, secondary source, detector and observer located at pointsP(0,0,0), S(u8, vS) ws), E(ue, ve, we) and O(uo, v0, w0), respectively, correspond-ing to eqn. (2.45) and analyse system stability in these regions consider thetwo cases of Q(w) > 1 and Q(u) < 1.
The case of Q(w)>l
Substituting for Q{UJ) > 1 into eqn. (2.42) and simplifying yields:
where a is a positive real number denoting the distance ratio:
It can be shown that eqn. (2.46) defines a family of spheres in the three-dimensional UVW space as [305]:
a?vs I 2
-a2] [ l ~ a 2 j L l ~ a (2-47)
where r is the distance between the primary and secondary sources. Eqn.(2.47), for a = 0 corresponds to point P (location of the primary source) and
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANG in three-dimensional propagation 51
for a = oo to point S (location of the secondary source). If a = 1, theneqn. (2.47) defines a plane surface, which perpendicularly bisects the line PSjoining the locations of the primary and secondary sources:
\ 2v3 ) \ 2w» )
It follows from the above that for Q(uS) > 1 the detection point should remaininside the sphere defined by eqn. (2.47). This, using eqn. (2.36) yields thelocus of detection points E as:
- 1 > a = ( 2 - 4 8 )
Therefore, if the observer and the detector are restricted to the regions of theUVW space defined by eqns (2.47) and (2.48), respectively, then Q(u)) > 1.In terms of eqns (2.44) and (2.45) this means that for such observation anddetection points where the distance difference rgh — ref is an odd multiple ofhalf the signal wavelength (implying that (f>(u) is an odd multiple of TT and9(UJ) is —180°) the gain margin k9 assumes values that are either equal to orgreater than 2. This implies that, under such a situation, at locations of theobservation and detection points for which <t>(u) is an odd multiple of TT thesystem will be stable.
The case of Q(u) < 1
Substituting for Q(u) < 1 into eqn. (2.42) and using eqn. (2.46) yields:
^ > a (2.49)rf
It follows from the results obtained above, for Q(u) < 1, that eqn. (2.49),for the observation and detection points, defines the region of the three-dimensional UVW space which is the complement of that given in eqns (2.47)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

52 Active Sound and Vibration Control
and (2.48); i.e. for the observer restricted to the locus defined by eqn. (2.47)the detector is to be restricted to the following:
Thus, if the observer and detector are restricted to their respective regionsdefined by eqns (2.47) and (2.50), then at locations for which the distancedifference rQh-ref in eqn. (2.44) is an integral multiple of the signal wavelength(implying that <f>(ui) is an integral multiple of TT and 0(u) will be —180°) thegain margin of the closed-loop system is given by eqn. (2.45) as:
. — Q{UJ) for (/>\~j — -»«"» __ ~ ,-
Prom which the ranges of the gain margin are obtained as:
kg < 1 for </>(w) -kg > 1 for 0(CJ) =
Eqn. (2.51) implies that for such detection and observation points in the regionof the three-dimensional UVW space defined by eqn. (2.49) for which (j>(u) isan even multiple of TT the gain margin is less than unity and hence the sys-tem will be unstable. However, if at such points (j>(u) is an odd multiple of ?r,then the gain margin is greater than unity and hence the system will be stable.
2.5.2 Phase margin
Substituting for B{ui) from eqn. (2.41) into eqn. (2.40) and simplifying Yields:
0 < Q(u>) < 2 (2.52)
and the range of </>(u) as:
^ = ^ < ^ ) < ^ ± ^ for 0 < g ( w ) < 2 , « = 0,±l . . . .
(2.53)
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 53
Substituting for <j)(u) from eqn. (2.42) into eqn. (2.53) and simplifying yieldsthe allowable distance difference rgh — ref as:
j for 0 < Q(u) < 2(2.54)
Eqn. (2.54), or equivaJently eqn. (2.53), is the necessary condition for B(UJ) =1 in eqn. (2.40). Under this condition the phase angle 0(u)) follows from eqn.(2.41). Using eqns (2.40), (2.41) and (2.53) yields the phase margin as:
- tan-*
f o r
+ (2m + 1) , for < </>(») < 0
where 0 < Q(u>) < 2 and m and n are integer numbers. To find the corre-sponding region of the three-dimensional UVW space in terms of the locationsof the observation and detection points, eqn. (2.52) is considered.
Substituting for Q(w) from eqn. (2.42) into eqn. (2.52), using eqn. (2.46)and simplifying yields:
— > 0.5a
This yields the locus of detection points E as:
It follows from the above that, for a minimum-phase situation, the system willbe stable for locations of detector and observer in the regions defined by eqn.(2.55), where the phase margin assumes positive values; however, for negativevalues of k$ the system will be unstable.
The analysis presented above demonstrates that system stability is affectedby the geometric arrangement of system components. This has led to identi-fying regions of the propagation medium as loci of detection and observationpoints for which the system will be unstable. For simplicity reasons, an SISOstructure has been considered in the above analysis. The results thus obtained
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

54 Active Sound and Vibration Control
can be extended, in a similar manner, to an SIMO structure through consid-eration of the feedback loops in the system in a unified manner to affect thelocation of the detection point and all the observation points relative to theprimary and secondary sources.
2.6 Conclusions
A coherent analysis and design of ANC systems in a three-dimensional nondis-persive propagation medium have been presented. The relation between thetransfer characteristics of the required controller and the geometrical arrange-ment of system components has been studied, and conditions interpreted asgeometrical constraints in the design of ANC systems have been derived andanalysed.
The interference of the component waves in an ANC system effectivelyleads to a pattern of zones of cancellation and reinforcement. An increasein the physical extent of cancellation, for a given maximum frequency of thenoise, can be achieved by decreasing the separation between the primary andsecondary sources. In practice, this is limited due to the physical dimensions ofthe sources. However, it has been demonstrated that, in practice, the physicalextent of cancellation can be significantly increased through a proper designincorporating a suitable geometrical arrangement of system components.
In practice, the process of controller implementation, using analogue and/ordigital techniques, results in errors in the amplitude and phase of the controller.Such errors affect the amount and, hence, the physical extent of cancellationto a lessor or greater degree, depending on the extent of the error involved.Although, the general trend of the pattern of zones of cancellation and rein-forcement appear similar to the situation when there are no errors in the con-troller characteristics, the physical extent of cancellation is affected by sucherrors and the level of cancellation is reduced at the observation point (s).
The dependence of the required controller characteristics on the character-istics of the acoustic paths in the system, arising from geometrical arrangementof system components, can sometimes lead to practical difficulties in the de-sign of the controller and to instability in the system. In particular, specificarrangements of system components have been identified as loci of detectionand observation points relative to the sources, which lead to the critical situ-ation of the IGC requirement.
In an ANC system incorporating a single primary source and k secondarysources, realised within an SIMO structure, the locus of detection and obser-
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

ANC in three-dimensional propagation 55
vation points leading to the IGC requirement is defined in relation to the lo-cations of the primary source considered with each secondary source as well aseach secondary source considered with any other secondary source; for k = 1,only the primary and secondary sources are considered. In this manner, withan FBCS, where both the detection and observation points coincide with oneanother, the conditions for the IGC requirement are always met. With anFFCS, however, it is possible to avoid the locus of detection and observationpoints, which lead to the IGC requirement by a proper geometrical arrange-ment of system components.
The dependence of the controller characteristics, for optimal cancellationof the noise, on the characteristics of system components and geometry cansometimes lead to practical difficulties in system stability. For given systemcomponents and controller transfer function the stability and relative stabilityof the system have been found to be dependent on the observer and detectorlocations relative to the primary and secondary sources in the medium. Lociof observation and detection points have been identified in the medium thatcan cause the system to become unstable. Thus, it has been demonstratedthat stable operation of the system can be assured by a proper ANC systemdesign incorporating a suitable geometric arrangement of system components.
Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp

Downloaded 23 Aug 2012 to 128.59.62.83. Term of Use: http://digital-library.theiet.org/journals/doc/IEEDRL-home/info/subscriptions/terms.jsp