
acted Signature redacted
46
Automation Process in Synthetic Biology Research by Masakazu Nagata B.Eng., Kyoto Institute of Technology (2002) Submitted to the Integrated Design & Management Program in partial fulfillment of the requirements for the degree of Master of Science in Engineering and Management at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 2017 @ Massachusetts Institute of Technology 2017. Author ................ Signature red All rights reserved. acted Integrated Design & Management Program May 19, 2017 Certified by ............... Signature redacted Ron Weiss Professor, Department of Biological Engineering Thesis Supervisor A ccepted by ........................... Signature redacted Director, Integrated Design & Matthew S. Kressy Management Program JUN 2 7 2017 LIBRARIES ARCHIVES User-Centered C__ -
Transcript of acted Signature redacted

Automation Process
in Synthetic Biology Research
by
Masakazu Nagata
B.Eng., Kyoto Institute of Technology (2002)
Submitted to the Integrated Design & Management Programin partial fulfillment of the requirements for the degree of
Master of Science in Engineering and Management
at the
MASSACHUSETTS INSTITUTE OF TECHNOLOGY
June 2017
@ Massachusetts Institute of Technology 2017.
Author ................ Signature red
All rights reserved.
actedIntegrated Design & Management Program
May 19, 2017
Certified by ...............Signature redacted
Ron WeissProfessor, Department of Biological Engineering
Thesis Supervisor
A ccepted by ...........................Signature redacted
Director, Integrated Design &Matthew S. Kressy
Management Program
JUN 2 7 2017
LIBRARIES
ARCHIVES
User-Centered
C__ -

User-Centered Automation Process
in Synthetic Biology Research
by
Masakazu Nagata
Submitted to the Integrated Design & Management Programon May 19, 2017, in partial fulfillment of the
requirements for the degree ofMaster of Science in Engineering and Management
Abstract
By designing and re-designing biological system, synthetic biology is advancing a widerange of domains from biotherapeutics for fatal cancers to biofuels and artificial meatto improve the global environment and food security. As the scale and complexity ofsynthetic biology endeavors are increasing, designing automation processes to replacemanual labor is becoming more important to improve cost effectiveness, reproducibil-ity, and efficiency including error reduction. Despite the desire for lab automation inthe research and industry, in reality, scientists still largely rely on manual techniquesin the labs even though the conventional approach becomes unmanageable and slowsdown their research iterations. One of the key problems is the mental barrier. Ac-cording to the online survey and interviews conducted in this research, almost 90%of researchers cannot trust the quality of robot's work even though they do not knowthe actual success rate of the robotics work and what the robot can do. To bridgethe gap for making the automation process more accessible, this research is proposingthe use of "Bot", a software robot with which people can communicate through theinternet and "Internet of things (IoT)". In the system, Bot is connected with the labautomation robots such as liquid handling robots. By communicating with the Botusing user-interfaces such as Slack, researchers can place work orders on lab robotsand monitor their order status anytime. Moreover, people can directly ask the Bot forimportant information and instructions, such as protocol success rate and scheduling.
Thesis Supervisor: Ron WeissTitle: Professor, Department of Biological Engineering
2

Acknowledgments
I would first like to thank Professor Ron Weiss. Even though I dived into the field
of synthetic biology without any biology background, he patiently listened to my
thought and explored how design can contribute to synthetic biology together.
I would like to thank Jonathan Babb and Blake Elias working on lab automation
project in MIT Weiss lab. They always gave me important advice to decide the di-
rection of the project.
To all survey participants and Weiss lab members. Without their participation and
inputs, the surveys could not have been successfully conducted.
I would also like to thank Matthew Kressy, the director of Integrated Design &
Management Program. He always encouraged me with his positive energy. To all
members of Integrated Design & Management Program. They are my family and I
can not be here without them.
To Apoorv Gupta for your support as my best friend and also an expert in syn-
thetic biology.
I would also like to thank my mother and father for their love.
Finally, I would like to thank my wife for her dedicated psychological support from
Tokyo, Japan.
3

Contents
1 Introduction 10
1.1 Synthetic Biology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Automation in synthetic biology . . . . . . . . . . . . . . . . . . . . . 11
1.3 M otivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4 O utline . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Background 14
2.1 Two approaches for lab automation . . . . . . . . . . . . . . . . . . . 14
2.2 Bottom-up approach with TECAN workstation . . . . . . . . . . . . 15
2.3 Related works . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.1 Puppeteer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.3.2 R aven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.3 MoClo Planner . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.4 SBOLDesigner . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 User analysis 21
3.1 Current automation process . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Reality in the lab . . . . . .. . . . . . . . . . . . . .. . . . . . . . . . . 23
3.3 Needs and Problems in current process . . . . . . . . . . . . . . . . . 27
4 Design Prototyping 30
4.1 How to lower psychological hurdle . . . . . . . . . . . . . . . . . . . . 30
4.2 Communication channel . . . . . . . . . . . . . . . . . . . . . . . . . 32
4

4.2.1 E m ail . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4.2.2 W ebsite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.2.3 Slack bot . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
5 Design Evaluation 38
5.1 Method of user evaluation . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2 Result of the evaluation . . . . . . . . . . . . . . . . . . . . . . . . . 38
5.2.1 Ideas for lowering psychological hurdle . . . . . . . . . . . . . 38
5.2.2 Communication channel . . . . . . . . . . . . . . . . . . . . . 40
6 Conclusion 43
6.1 Summary and contribution of research . . . . . . . . . . . . . . . . . 43
6.2 Future w ork . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6.2.1 System development . . . . . . . . . . . . . . . . . . . . . . . 44
6.2.2 For self-operation . . . . . . . . . . . . . . . . . . . . . . . . . 44
5

List of Figures
1-1 Example of synthetic biological circuit Reprinted from Wikipedia, Min-
ing logic gates in prokaryotic transcriptional regulation networks, Michael
K ang, 2011. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2-1 TECAN liquid handling robot A: Tips for pipetting arms, B: pipetting
arms, C: 96 wells for sources, D: 96 wells for destinations, E: Electronic
chilling/heating dry bath . . . . . . . . . . . . . . . . . . . . . . . . . 16
2-2 Puppeteer web platform User Interface Reprinted from the presenta-
tion provided by Douglas Densmore at Brown University, November
11, 2015 Left: Schedule robotic automation process. Right: Track the
project progress visually in real time. . . . . . . . . . . . . . . . . . . 17
2-3 Raven User Interface Reprinted from Raven introduction at CIDAR
group website, Evan Appleton and Douglas Densmore Raven can gen-
erate the instruction for manual and automation process from the de-
sign data of biological circuits. . . . . . . . .. . . . . . . . . . . . . . 18
2-4 MoClo Planner User Interface Reprinted from iGEM2012 website, Welles-
ley Human-Computer Interaction Lab, 2012 User interface is divided
into three layers of the modular cloning system and user can intuitively
design the biological circuit by the touch user interface. . . . . . . . . 19
2-5 SBOLDesigner User Interface Reprinted from research article on ACS
Synthetic biology, Michael Zhang, 2017 A user can easily and visually
design biological circuits with the simple step-by-step interaction. . . 20
6

3-1 Information flow of the current cloning automation process This is the
current cloning automation process using the TECAN liquid handling
robot in MIT Weiss lab. The process is divided into four layers, system,
scientist, operator, and robot. In these layers, stakeholders interact
each other. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3-2 Percentage of cloning task in total working time Participants were
asked "What percentage of your time do you use for DNA cloning
lab work?". This graph describes the distribution of how much time
researchers use their time for DNA cloning lab work in their research.
On average, 44.3% of their working time is used for the cloning work. 23
3-3 Scale of the experiment Participants were asked "How many new DNA
constructs do you make at a time?". Survey participants indicate that
if they could use the robotics automation, they would make 1.9 times
as many DNA constructs as in the current manual process. . . . . . . 24
3-4 Experience & Interest in using robot Participants were asked "Would
you be able to come up with more/better ideas if you did not have to
do the cloning-related lab work?"(Left) and "Would Your productivity
be higher if you did not have to do the cloning-related lab work?"(Right). 24
3-5 Experience & Interest in using robot Participants were asked "How
often do you use a robot in your research now?"(Left) and "Are you
interested in using a robot for your research?"(Right). One-half of
participants have never used the robot for DNA cloning work before
and over 80% of them showed their interests in using robots. . . . . . 25
3-6 Preference for the way to use the robot Participants were asked "How
do you want to use a robot?". One-half of them mentioned that they
want to rely on a technician, but almost 50% of participants indicated
that they want to use by themselves. . . . . . . . . . . . . . . . . . . 26
3-7 Potential issue in using the robot Participants were asked "What is the
most important issue for using a robot?". Over 80% of participants
showed their concerns about Reliability/Trustworthy. . . . . . . . . . 27
7
3-8 Expected success rate for the robotics automation Participants were
asked "How much success rate do you need for using the robot automa-
tion in your research?". About 80% of survey participants mentioned
that their expected success rate is same of less than the current actual
success rate (80%) of TECAN liquid handling robot used in the lab. . 28
4-1 The ways of preparation for using a robot Left: Prepare sources on 96
wells with a pipette. Right: Provide tubes that researchers maintain
sources. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1
4-2 Efficient use of available capacity Use the gap between the capability
of robot and the workload of an actual order . . . . . . . . . . . . . . 32
4-3 Excel order form Left: Input form for the names of constructs, re-
striction enzymes, and parts. Right: Visual instruction for preparing
sources on 96 wells. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4-4 Web platform User Interface Top page: a user can check order his-
tory, status, and other important information about lab automation.
Order form: a user can input required information for using robotics
autom ation process . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4-5 Slack User Interface with bot of TECAN liquid handling robot A user
can chat with the bot of the TECAN liquid handling robot on Slack. 35
4-6 Drag & Drop order form on Slack A user can submit the Excel order
form by dragging and dropping the file on the conversation screen of
S lack . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
8

4-7 System structure of TECAN-bot TECAN-bot is connected with TECAN
liquid handling robot. When the email is sent to the specific mail
account, the message is transferred to TECAN-bot through the ap-
plet such as IFTTT. Then TECAN-bot posts the message on Slack.
TECAN-bot behavior is maintained on Botkit, an open source toolkit
for creating the bot. The toolkit allows us to easily manage the bot
behavior on the web-based platform. The toolkit is hosted on the host-
ing service such as Heroku. Basically, this system can be created for
free or with the low cost of hosting service fee. . . . . . . . . . . . . . 37
5-1 Expected delivery schedule Participants were asked "After submitting
the order of DNA assembly automation, how long can you wait for
the delivery of the result?"(Left) and "How many additional work days
can you accept if you can provide just tubes of each source without
preparing 96 wells?"(Right). . . . . . . . . . . . . . . . . . . . . . . . 39
5-2 Intention to piggyback on other person's order Participants were asked
"A technician can handle multiple orders at the same time. Sometimes
there are some slots you can use for your order as a trial and the size
of the assembly does not matter. Would you order more if you receive
the message like 'We will run Golden Gate assembly for <Name of a
user> in a few days. If you want the robot to do your cloning work at
the same time, please let me know.' ?". . . . . . . . . . . . . . . . . . . 40
5-3 Adaptability to the current process Participants were asked "How adapt-
able to your work style is the idea?" for 3 use cases with 7 scales. Each
point is defined by the average of their answers. . . . . . . . . . . . . 41
5-4 Potential of bot technology Participants were asked "Do you think the
bot technology has the potential to make lab automation more acces-
sible and useful?" . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
9

Chapter 1
Introduction
This chapter describes the field of synthetic biology, the current situation of lab
automation in the field, the motivation of this research, and the outline of the thesis.
1.1 Synthetic Biology
Synthetic biology is the emerging field of study that can transform fundamental bi-
ological science to usable applications. It can be described as design or re-design of
biological system and also one of the promising approaches for addressing big social
issues by developing new bio-related products such as biotherapeutic, biomaterial,
and bioenergy.[1] It is an interdisciplinary field highly integrated with various disci-
plines from genetic engineering and molecular biology to electrical engineering and
computer science. Traditional bioengineering has allowed us to manipulate existing
DNA by inserting specific genetic code from one cell to another. Synthetic biology
has enabled us to create new biological parts and circuits(Figure 1-1) that do not
exist in nature beyond the manipulation of natural living organisms.[2]
10

Figure 1-1: Example of synthetic biological circuitReprinted from Wikipedia, Mining logic gates in prokaryotic transcriptional
regulation networks, Michael Kang, 2011.
1.2 Automation in synthetic biology
As the scale and complexity of biological system studied in the field are increasing,
design automation process is becoming more important from the viewpoint of cost
effectiveness, reproducibility, and efficiency including error reduction.[3] In addition,
such an automated system allows scientists to autonomously record the data of every
experimental process. It contribute to effective data management and data sharing
that are vital for accelerating synthetic biology research.1
In the rapidly growing industry of synthetic biology, many companies are moving
toward for the lab automation by actively developing and implementing robotics
automation processes in their research and production processes for improving their
productivity. Academia is also promoting the direction. For example, MIT-Broad
Foundry is developing lab automation system used for the complete design-build-test
cycle.2 In addition, a lot of research is going on in the field of robotics automation
for synthetic biology.
Like 3D printer, such robotics automation devices are rapidly becoming affordable.
For example, Opentrons, a startup company established in New York, revealed the
open-source liquid handling robot as a cloud funding project in 2014 and launched
commercial products at $3000.3 Bio-maker space is also becoming a popular place
1Nature Toolbox: The automated lab, December 03, 2014, http://www.nature.com/news/the-automated-lab-1.16429
2IEEE Pulse, April 27, 2016, http://pulse.embs.org/march-2016/the-foundry-scaling-up-biological-design/
3 https://opentrons.com/
11

that is regarded as 'do it yourself' workshop for biotechnology-based creation as well
as typical maker spaces implementing 3D printer, laser cutter, and more machines for
physical creation. It is accessible to public and requires low cost and usable machines.
Such trend and new startup companies would make lab automation devices more
affordable and feasible for synthetic biology research.
1.3 Motivation
Despite the movement and desire of lab automation in the research and industry,
in reality, scientists largely rely on manual techniques in the labs even though the
conventional approach becomes unmanageable and slow down their iteration in their
research. 14] [51 There are still missing parts in real research environments for deploying
robotics automation processes. One of them is the User Interface(UI) for researchers
and technicians managing the robots because lab automation can not be usable with-
out acceptable UI, even though the devices are affordable and feasible. This thesis
describes a new approach to bridge the gap between user and machine by evaluating
three prototypes that ease usability of the machine, including conventional spread-
sheet, web platform, and bot technology implemented on the project communication
tool called Slack.
1.4 Outline
The following sections describe the evolution of ideas in the thesis.
e Background: introduces a context for this thesis research and relevant work in
lab automation for synthetic biology research.
e User analysis: explains the current automated process used in the lab and
user needs/problems investigated by observation research, online survey, and
interviews.
12

" Design Prototype: proposes design prototypes that potentially solve the current
problem existing in the communication between researchers and technicians
and/or Robots.
* Design Evaluation: surveys the user preferences in each design prototypes for
finding out important factors that make communication more smooth in the lab
automation process.
" Conclusion: describes future works that would be required to transform the
culture to lab automation and summarizes the thesis.
13

Chapter 2
Background
This chapter describes the two types of research approach, top-down approach and
bottom-down approach. In addition, the scope of the research and related research
works are introduced.
2.1 Two approaches for lab automation
The typical research process of synthetic biology can be described as design-build-
test cycle. It is an iterative process for discovering new insights in the research and
lab automation has enormous potential to speed up the cycle. There are mainly two
approaches for developing lab automation system, top-down approach and bottom-
down approach.
The top-down approach automates the whole research process from the phase of
designing biological systems or circuits by using specific software solution developed
for the automation. The design data is transferred to the build phase for actually de-
veloping them in the lab by robotics automation. The build constraints will be trans-
ferred for testing by machines such as flow cytometry devices and analysis software.
In the top-down approach, researchers can fully enjoy the benefit of lab automation
by following the defined process. Here, the process standardization is important, be-
cause each scientist or lab has different research processes and uses different software
tools.
14

In contrast, the bottom-up approach focuses more on flexibility than comprehensi-
bility. This approach is designed based on the current situation and allows researchers
to work with a section of lab automation with limited restriction about what kind of
software tools they need to use. For example, in the approach, people can use DNA
assembly automation in build phase without changing design tool they currently use.
This is an incomplete automation, but it is easier for new users to use when they
explore new processes. Using bottom-up approach makes the lab automation more
accessible for researchers and accelerates an iteration process for improving the lab
automation system.
2.2 Bottom-up approach with TECAN workstation
Since 2011, the Synthetic Biology Center at MIT has conducted many experiments
and research with a liquid handling workstation developed by TECAN(Figure 2-1).
The robot can automate time-consuming pipetting task for DNA cloning. Currently,
MIT Weiss Lab for Synthetic Biology is developing an automated process by using
the liquid handling robot with the bottom-up approach. In this thesis, the developing
process is used as the main example of lab automation for exploring the ideal user
interface design.
15

Figure 2-1: TECAN liquid handling robotA: Tips for pipetting arms, B: pipetting arms, C: 96 wells for sources, D: 96 wells
for destinations, E: Electronic chilling/heating dry bath
2.3 Related works
Relatively, academic research in the area focuses on the top-down approach, but there
is some research for developing systems that make lab automation more usable and
user-friendly.
2.3.1 Puppeteer
The Cross-disciplinary Integration of Design Automation Research (CIDAR) group at
Boston University is developing many valuable tools for lab automation in the field of
synthetic biology. They are developing Puppeteer, a web-based platform that enables
scientists to plan and manage laboratory equipment including robots. [6] Penguin, a
part of the web-based platform, generates the instructions for established standard
16

protocols and translates high-level assembly protocols to a low-level robot interface
of lab automation robots such as TECAN liquid handling machine. [7] Puppeteer also
optimizes the use of laboratory equipment and resources by efficiently allocating the
tasks to operators(Figure 2-2).
The platform [6]
Scheduling Project Progress
IPuppeteer Puppeteer
Figure 2-2: Puppeteer web platform User InterfaceReprinted from the presentation provided by Douglas Densmore at Brown
University, November 11, 2015Left: Schedule robotic automation process. Right: Track the project progress
visually in real time.
2.3.2 Raven
Raven is a DNA assembly planning tool developed by CIDAR group at Boston Uni-
versity. This tool generates optimized assembly plans based on the biological circuits
designed by researchers(Figure 2-3). The generated assembly planning instruction
can be converted for automation assembly process using liquid handling robots. Be-
cause the manual design and assembly process has the limitation in the scale, such
an automated approach to inform the steps to a robot would be important in lab
automation. [81
17

RavenCAD Desgn Fcumen aoon contat Youart logged ias .Cnhan
imag instructions Parts ust Summary Discard Desin
Target
IntermediatesRun
Assembly Statistics
Number of Goal Parts 2
Number of Assembly Steps 6 Download OptionsPleas ue sfl-liistheras t dio-1.
Number of Assembly stages 2 P Me
Number of Reacsorns 20 Download Graph Image
Figure 2-3: Raven User InterfaceReprinted from Raven introduction at CIDAR group website, Evan Appleton and
Douglas DensmoreRaven can generate the instruction for manual and automation process from the
design data of biological circuits.
2.3.3 MoClo Planner
Modular cloning (MoClo) is hierarchical and modular design methodology based on
Golden Gate assembly. By designing from standardized libraries of defined basic
genetic parts, the system provides highly efficient design approach for scientists. This
system is divided into three levels of assembly: basic parts (Level 0), transcriptional
units formed with linked parts (Level 1), and genetic circuits consisting of combined
transcriptional units(Level 2).[9] MoClo Planner is an interactive collaboration system
for the modular cloning method(Figure 2-4). This system visualizes the three levels
of the modular cloning system and a user can interact with the design of each layer
through the touch user interface. Based on genetic circuits designed on Level 2
modules, researchers will create assembly plan for manual process or lab automation
process using liquid handling robots. Because of modularity of the modular cloning
system, it could be easy to link the design to the automation process for making
actual constructs.[10]
18

Search T T T T T T T TBrowse By Category r.-- w whft84 '#*. o
forward--
bidirectional7 T 7
ProotrsRBS CDsTrmnts
Pav 1Module
ePite ofro GM2wbit, We0.s"e Humn-mpte InWt o Lab,.
__ _ _ 1 =-
T [ ~ ~ ID T
BN awls 20W12
LUel 2 Pntr e stdtdot Geerat pyt m rglsatsots~y~Automatic,
NIi:4 IL2 L--M [LI P7 WErI I~ .I d-Figure 2-4: MoClo Planner User Interface
Reprinted from iGEM2O12 website, Wellesley Human-Computer Interaction Lab,2012
User interface is divided into three layers of the modular cloning system and usercan intuitively design the biological circuit by the touch user interface.
2.3.4 SBOLDesigner
The Synthetic Biology Open Language (SBOL) is developed to standardize the glyphs
and digital format used for synthetic biology. [11] SBOLDesigner is user-friendly CAD
software for biological design by Myers Research Group at the university of Utah. This
tool is developed based on the graphic design standard defined by SBOL. By simple
step-by-step interaction with the buttons of each component of a genetic circuit such
as promoter and terminator, a user can easily design and edit the biological circuits.
This software also enables a user to access to the standardized parts stored in the
repositories such as SynBioHub.[12]
19
-1

r+ SBOLDesigner v2 - New design - L X
JoI\\J &D T 9I 0> UnnamedPart N' Overview
Design
Pro RBS CDS Ter
Parts
0T 0 D =Gen Pro RBS CDS Ter Ori PBS CUT Scar
Figure 2-5: SBOLDesigner User Interface
Reprinted from research article on ACS Synthetic biology, Michael Zhang, 2017A user can easily and visually design biological circuits with the simple step-by-step
interaction.
20

Chapter 3
User analysis
This chapter describes the current workflow for using TEACAN liquid handling ma-
chine in MIT Weiss lab, the online survey conducted to determine their perception
about lab automation, and the in-person interview to analyze their primary concerns
in implementing lab automation.
3.1 Current automation process
Currently, TECAN liquid handling robot mainly provides Golden Gate cloning as-
sembly automation in MIT Weiss lab. The current cloning automation process is
divided into four layers: system, scientist, operator, and a robot. The system layer is
storing the data such as the instruction and order form. The other represents what a
scientist, an operator (technician), and robot do in the lab automation process. The
user interaction happens among these four layers(Figure 3-1).
As the first step of the current process, each scientist needs to find the instruction
to use the automation process and download the Excel order form in the lab private
website created by the university wiki system. After downloading the file on each local
laptop, they edit it by adding required information such as the names of constructs,
types of restriction enzymes, parts they want to combine, and the amount of each
source they can provide. This file is sent to an operator managing the robot via
email. The operator checks the order, replies for order confirmation, and requests
21

Lab WikiDownloadOrder form
Crder Edit for robot Set-I * Run robot
A. Stausn hc
confiff~ ~ ~ ~ ~ Errorn etuc.e)iietig t.
Figure 3-1: Information flow of the current cloning automation processThis is the current cloning automation process using the TECAN liquid handlingrobot in MIT Weiss lab. The process is divided into four layers, system, scientist,
operator, and robot. In these layers, stakeholders interact each other.
the scientist to prepare the sources on 96 wells. In addition, an operator needs to
modify the contents and file format of the order sheet to allow the robot program
(developed in Python) to read the order form. Before running the robot, the operator
set up the sources and other required equipment as well as doing some lab works as
the preparation. On the software side, the modified order sheet should be uploaded
to the Python program installed on the PC directly connected to the robot. The
operator can run the robot on the software developed by TECAN, as the front-end
UI. During the run, the operator directly checks the error or status in the lab. When
the robot finishes the process, the operator sends the job completion mail including
the location of the outputs and the scientist picks them up. An operator sometimes
needs to communicate with the scientist in person because of the lack of information
on the order form or insufficient sources provided.
22

3.2 Reality in the lab
To understand the current work style and the perception about robotics automation
in the lab, I conducted an online survey with 28 researchers including 16 postdoctoral
students and 12 Ph.D. students working on synthetic biology research.
The survey showed that almost half of participants spend over 50% of their work
time on DNA cloning and on average, this cloning work accounts for 44% of total work
time.(Figure 3-2) This percentage depends on the research area that the researcher
is working on, but the automation for DNA cloning would have an enormous impact
on their research experience.
Average
25 ::44.3%20
M 15
C
0
0% 10% 20% 30% 40% 50% 60% 70% 80% 90%
Percentage of work time for cloning work (%)
Figure 3-2: Percentage of cloning task in total working timeParticipants were asked "What percentage of your time do you use for DNA cloninglab work?". This graph describes the distribution of how much time researchers usetheir time for DNA cloning lab work in their research. On average, 44.3% of their
working time is used for the cloning work.
In terms of the scale of their experiments, almost 90% of the survey participants
make 0 to 24 DNA constructs in their current DNA cloning task. However, they
indicated that if they could use the robots for the task, they would make almost
twice as many DNA constructs as in the manual process (Figure 3-3).
How does the high workload task affect the creativity and productivity of scien-
tists? Almost 90% of participants feel that if they could eliminate the manual lab
work for DNA cloning, they could come up with more or better ideas and all of them
answered that they could be more productive (Figure 3-4).
23

0 With manual process N With robotics automation (Expectation)
0 L..-
0-24 25-48
Manual -) Robot
x1.9
49-72 73-96
Number of DNA constructs
Figure 3-3: Scale of the experimentParticipants were asked "How many new DNA constructs do you make at a time?".Survey participants indicate that if they could use the robotics automation, theywould make 1.9 times as many DNA constructs as in the current manual process.
Strongly agreeAgreeSomewhat agree
Neither agree nor disagreeSomewhat disagreeDisagree
Figure 3-4: Experience & Interest in using robotParticipants were asked "Would you be able to come up with more/better ideas if
you did not have to do the cloning-related lab work?"(Left) and "Would Yourproductivity be higher if you did not have to do the cloning-related lab
work?"(Right).
Despite the high workload of DNA cloning and considerable concerns about using
robotics automation, over one-half of participants have never used robotics automa-
tion for their research and just 8% of researchers use such robots for their daily lab
24
s0
60
40
20
Z
C
CL
J

works. On the other hand, more than 80% of participants expressed their interest in
using the robots (Figure 3-5). In addition, one-half of survey participants intended
that they want to ask a technician to use the robot or use it with a technician. How-
ever, one-half of researchers said they want to use the robot anytime by themselves
(Figure 3-6).
Often use Rarely useSometimes use Never used before
Definitely YES 0 Might or might notProbably YES * Probably NO
0 Definitely NO
Figure 3-5: Experience & Interest in using robotParticipants were asked "How often do you use a robot in your research now?"(Left)
and "Are you interested in using a robot for your research?"(Right). One-half ofparticipants have never used the robot for DNA cloning work before and over 80%
of them showed their interests in using robots.
25

How do you want to use a robot?
Want to ask technician to use a robot Instead meWant to use with technician's supportWant to use anytime by myself
Figure 3-6: Preference for the way to use the robotParticipants were asked "How do you want to use a robot?". One-half of them
mentioned that they want to rely on a technician, but almost 50% of participantsindicated that they want to use by themselves.
There might be some barriers we should eliminate for promoting the lab automa-
tion. What is the obstacles and difficulties for scientists in using robotics automation?
The most serious concern they feel is the issue of reliability and trustworthy. The
survey showed that more than 80% of the participants cannot believe the quality of
a robot's work. About 60% expressed that scheduling and turn-around time would
be an issue in lab automation. The difficulty in using a robot also would be a big
problem mainly for people who intended to prefer to use the robot by themselves. In
addition to concerns about the functionality of the robot, some people described the
difficulty in the communication with a technician also would be a problem (Figure
3-7).
26

Reliability / Trustworthy
Scheduling / Turn-around time
Difficulty in using robot by myself
Number of available protocol
Level of yield
Communication with technician
Lack of information about what the robot can do
0% 10% 20% 30% 40% 50% 60% 70% 80% 90%
Percentage in participants
Figure 3-7: Potential issue in using the robotParticipants were asked "What is the most important issue for using a robot?". Over
80% of participants showed their concerns about Reliability/Trustworthy.
3.3 Needs and Problems in current process
After the online survey, in-depth interviews were conducted for 6 researchers. Even
though many people showed their concerns about reliability and turn-around time of
the robotics automation, they did not clearly know about the actual success rate, the
robot running schedule, and also what the robot can do. Actually, in the additional
survey conducted for 10 researchers, about 80% of them showed that they would use
a robot if the success rate is 80% or more(Figure 3-8). However, the current actual
success rate of the TECAN liquid handling robot used in MIT Weiss lab is around
80% on average and would be same or higher than their expected success rate.
27

M 50% or more U 80% or moreN 70% or more Almost 100%
Figure 3-8: Expected success rate for the robotics automationParticipants were asked "How much success rate do you need for using the robotautomation in your research?". About 80% of survey participants mentioned that
their expected success rate is same of less than the current actual success rate (80%)of TECAN liquid handling robot used in the lab.
Because of such a black box environment, they felt the mental barrier preventing
them from using the robots, even though they expressed their interest in using robotics
automation. Many people also indicated that the scheduling and turn-around time
could be an issue in the online survey, but in the interview, many people mentioned
that they care more about how much time and effort they need for using a robot
more than how much time they need to get the result from a robot. To lower the
psychological hurdle for using robotics automation, we should consider how to balance
user's efforts and turn-around time. In addition, the current process is based on the
use case that a technician handles the robots, but actually many people mentioned
that they want to use a robot by themselves without the technician's help. From the
viewpoint of safety and maintenance management, it is difficult to allow general users
to use a robot by themselves, but it can be an opportunity to improve the level of
accessibility by providing technical training to early adopters.
Through the user research including the online survey and in-person interview,
three important design problems were picked up.
. How to lower psychological hurdle for using the robot
28

Reducing required efforts and time for using a robot is important to promote the
usage of lab automation. However, it could increase the technician's workload
and affect the delivery schedule. How can we balance them?
o How to share the information about lab automation
To improve the current black box situation, what kind of communication chan-
nel can make lab automation process more transparent and accessible?
o How to educate people for using lab automation
For those who want to use a robot by themselves, how can we train and educate
them to improve the accessibility of the robotics automation?
The third problem will require overcoming many technical issues that make the
robot operation complex and need enough time to educate people. So this research
focuses on the first two design problems for transforming the lab culture toward
automation process.
29

Chapter 4
Design Prototyping
This chapter describes design prototypes developed according to the needs and prob-
lems found in the user analysis. It includes ideas to reduce the mental barrier for
using robotics automation as well as communication channels to improve the trans-
parency of lab automation process. Currently, MIT Weiss lab primarily uses Golden
Gate assembly, so basically design prototypes described in this chapter focus on the
assembly method.
4.1 How to lower psychological hurdle
The survey described in chapter 3 said that researchers have hesitation in using a robot
because of time or effort they need as well as the lack of information and knowledge
about the robot. To lower psychological hurdle, two ideas were implemented in design
prototypes in this research.
The first idea is to provide the option whether a user does the required preparation
work or not. To use the TECAN liquid handling robot, each source of DNA parts that
a user wants to assemble should be set on 96 wells. According to the interviews, this
would be an annoying task for researchers. In the design prototypes, researchers can
provide just tubes of the sources instead of preparing 96 wells and ask a technician to
do this preparation task if they can accept additional delivery days to get the result
from the robot(Figure 4-1).
30

Provide tubes
Figure 4-1: The ways of preparation for using a robotLeft: Prepare sources on 96 wells with a pipette. Right: Provide tubes that
researchers maintain sources.
The second idea is to announce to the lab members when the robot has some
"space" for additional orders. In most of the cases, the technician runs the robot for
one order at a time even though the robot is capable of handling more orders. It is
inefficient in terms of the cost of running robot and set-up time for using a robot.
This available space would be a great opportunity for users who currently hesitate to
use the robot even though they are interested in it. By announcing that a user can
use the space for their trial use and the number of contracts does not matter, a user
would easily start to use the robot as their trial or order a small scale assembly(Figure
4-2).
31

Capability of robot
Actual order
Available space
Trial useSmall scale assembly
Figure 4-2: Efficient use of available capacity
Use the gap between the capability of robot and the workload of an actual order
4.2 Communication channel
To improve the communication among researchers, technicians, and robots, this thesis
is proposing "bot", a software robot with which people can communicate through the
Internet. To evaluate design prototype of the bot solution, two other prototypes
were also developed with the common communication channels, Email and website.
This chapter provides the overview of each design prototype. They are evaluated and
compared in chapter 5.
4.2.1 Email
Email is the most common communication channel used in the current automation
process (3.1). This scenario is based on the current process and uses email for most
of the communication such as ordering the automation process, checking the status,
and sharing the success rates. At first, researchers check how to order assembly
automation and download the Excel order form on the lab wiki website and edit
it on a local laptop. On the order form, researchers need to input the names of
constructs, restriction enzymes for the Golden Gate assembly method, and parts
that they want to combine. According to the user inputs, the layout of 96 wells is
32

automatically generated and visually displayed on the spreadsheet. This is a required
preparation a researcher needs to do for the order, but they can select whether they
will prepare the wells or just provide tubes of sources (parts) without any preparation
by checking or unchecking the option on the sheet.(Figure 4-3) Finally, researchers
send the Excel order form to a technician via mail. After the order submission,
researchers communicate with the technician via mail for the order confirmation and
order completion messages, changing their orders, and checking the order status. In
addition, researchers receive emails about useful information such as protocol success
rate, robot schedule, and service updates.
Destination set-up Source set-up
2 3
C, Pon .'
Name of constructs, restriction enzyme, parts 96 wells layout, checkbox for no preparation
Figure 4-3: Excel order formLeft: Input form for the names of constructs, restriction enzymes, and parts.
Right: Visual instruction for preparing sources on 96 wells.
4.2.2 Website
This scenario uses a web platform as a communication channel instead email used in
the current process. Users can do the same things as the case of using email on the
website without directly communicating with a technician, so their communication
effort would be lower than the case of email. In addition, researchers and also techni-
cian can easily manage their orders on the website. In the prototype, researchers can
input their order on the web form and decide whether they want to prepare 96 wells
or not by check or un-check the check box. The top page of the web platform provides
all information researchers need such as order history and status, robot schedule, and
33

success rate. (Figure 4-4).
Top page
000---
* Order history and status' The current success rate" Robot schedule
Order form
9-0 _ --
* -
a -
9 -
o
Figure 4-4: Web platform User InterfaceTop page: a user can check order history, status, and other important informationabout lab automation. Order form: a user can input required information for using
robotics automation process.
4.2.3 Slack bot
"bot" is a software robot people can communicate with through the Internet. This sce-
nario uses this technology on the commutation software tool called Slack.' On Slack,
people can communicate in groups and also with a specific member through the direct
message. Slack also allows users to easily implement bot technology into their com-
munication. The design prototype implements the bot for TECAN liquid handling
robot and it is named "TECAN-bot". Through the communication with TECAN-bot
on Slack, researchers can get all information they need for using a robot(Figure 4-5).
'Slack: https://slack.com/
34
__4

Conversationwith bat
bot forTECAN robot
Otecanbotmnlt I-
if you can accpt eta 3-5 daym, you can submit the mateial wIth tuies
CMu heip me?
rm her to helt Her are soe of the cawmands that I can vndpitwd now
See what kid of servce I can Mroide now
I -~d..See how to order golden tate amwenly sere to me
See order torm you cM subomt to me
Check eWe delivery afe to Vou
Shaom! What can i h*p Vou todey?
You can ckk the menmor say what you need!
Abut me C*ldnVte Orde erm Myctake meo dd
To use pld te sernbly rmvic sease dowidoad the order form an the below I, edit It and uploadth Me to me. d a*m mfiWd Fv A VM)N M UMDvew ~us r
Figure 4-5: Slack User Interface with bot of TECAN liquid handling robotA user can chat with the bot of the TECAN liquid handling robot on Slack.
For example, if researchers want to learn how to order the Golden Gate assembly,
they just need to post a question like "How can I order Golden Gate?" or just press
the button provided by TECAN-bot. TECAN-bot replies with the order instruction
including the URL where the order form can be downloaded and users can directly
download the Excel order form on Slack. As with the case of Email, researchers edit
the Excel order form on the local laptop. To submit the order, users just need to drag
and drop the file into the message window where they talk with TECAN-bot(Figure
4-6).
35
13

Figure 4-6: Drag & Drop order form on SlackA user can submit the Excel order form by dragging and dropping the file on the
conversation screen of Slack.
Once the submission is completed, the order information including order sheet
is sent to the technician on Slack. TECAN-bot is connected with the TECAN liq-
uid handling robot, so researchers and/or technicians can directly receive the order
completion message from TECAN-bot and also ask the bot about the current order
status. In addition, the bot sometimes posts useful information such as the current
protocol success rates to all group members(Figure 4-7).
36

V.slack
M.1.00Lab Group Technician Researcher
000Question Notify the status (ex. Order completion)
Order Reply user's questions (ex. Instruction)Feedback Post updates (ex. protocol success rates)
=SendO .Connect email
bot Email accountbot (Gmall)
* Connect
-t PaaS-i (Heroku)
Liquid Handling Robot
Figure 4-7: System structure of TECAN-botTECAN-bot is connected with TECAN liquid handling robot. When the email is
sent to the specific mail account, the message is transferred to TECAN-bot throughthe applet such as IFTTT. Then TECAN-bot posts the message on Slack.
TECAN-bot behavior is maintained on Botkit, an open source toolkit for creatingthe bot. The toolkit allows us to easily manage the bot behavior on the web-basedplatform. The toolkit is hosted on the hosting service such as Heroku. Basically,
this system can be created for free or with the low cost of hosting service fee.
37

Chapter 5
Design Evaluation
This chapter describes how the design prototypes were evaluated and the result of
the evaluation.
5.1 Method of user evaluation
The evaluation survey was conducted after showing the demos of design prototypes to
10 survey participants. The participants were screened from people who participated
the user analysis survey conducted in the phase of user analysis(3.1). It consisted
of 5 Ph.D. students and 5 postdoctoral students. All of the participants have used
Slack, but the duration of using the tool varies from 1 month to more than 1 year.
Basically, any correlation could not be found between the duration and the result of
the survey. To evaluate the design prototypes, the survey asked how adaptable each
idea is for their current work style.
5.2 Result of the evaluation
5.2.1 Ideas for lowering psychological hurdle
In each prototype, two ideas were implemented to lower the mental hurdle for using
robots. The survey participants described that they can wait 3 to 10 days for getting
38

the result from a robot. In addition, they mentioned that they can accept extra I to
3 days if they do not need to prepare 96 wells before the order(Figure 5-1).
IExtra
for no prep
Up to 3 business days U Up to 7 business days
Up to 5 business days Up to 10 business days
Up to 1 additional business days
Up to 3 additional business days
Figure 5-1: Expected delivery scheduleParticipants were asked "After submitting the order of DNA assembly automation,
how long can you wait for the delivery of the result?"(Left) and "How manyadditional work days can you accept if you can provide just tubes of each source
without preparing 96 wells?" (Right).
90% of survey participants also said that they would order more if they receive
the message like "We will run Golden Gate assembly for <Name of a user> in a few
days. If you want the robot to do your cloning work at the same time, please let me
know.". Actually, in the interview, some people described that it is easier to order if
they can piggyback on other person's order(Figure 5-2).
39

PiggybackOrder
Definitely YES Probably YES Might or might not
Figure 5-2: Intention to piggyback on other person's order
Participants were asked "A technician can handle multiple orders at the same time.
Sometimes there are some slots you can use for your order as a trial and the size of
the assembly does not matter. Would you order more if you receive the message like
'We will run Golden Gate assembly for <Name of a user> in a few days. If you
want the robot to do your cloning work at the same time, please let me know.'?"
5.2.2 Communication channel
Participants evaluated the adaptability of each design prototype from the viewpoint
of 3 use cases, "Order", "Communication", and "News". The use case of ordering the
robotics automation includes how to input the information and how to submit the
order. The use case of communication includes how to know the order confirmation
and completion, how to ask the order status, and how to know the instruction for using
a robot. The last use case represents how to get new updates about lab automation
such as protocol success rates, new services, and robot schedule. The result of the
survey shows that overall, the Slack bot is the most adaptable for the current work
style of the survey participants. Email is the most common communication channel
used in the current automation process, but the channel would not be good for small
communication such as just receiving the notification of order completion. Actually,
some participants mentioned that they do not like to send or receive emails for such a
communication. On the other hand, the web page gives a choice if a user accesses to
the information and reduce the communication transaction. However, in other words,
40
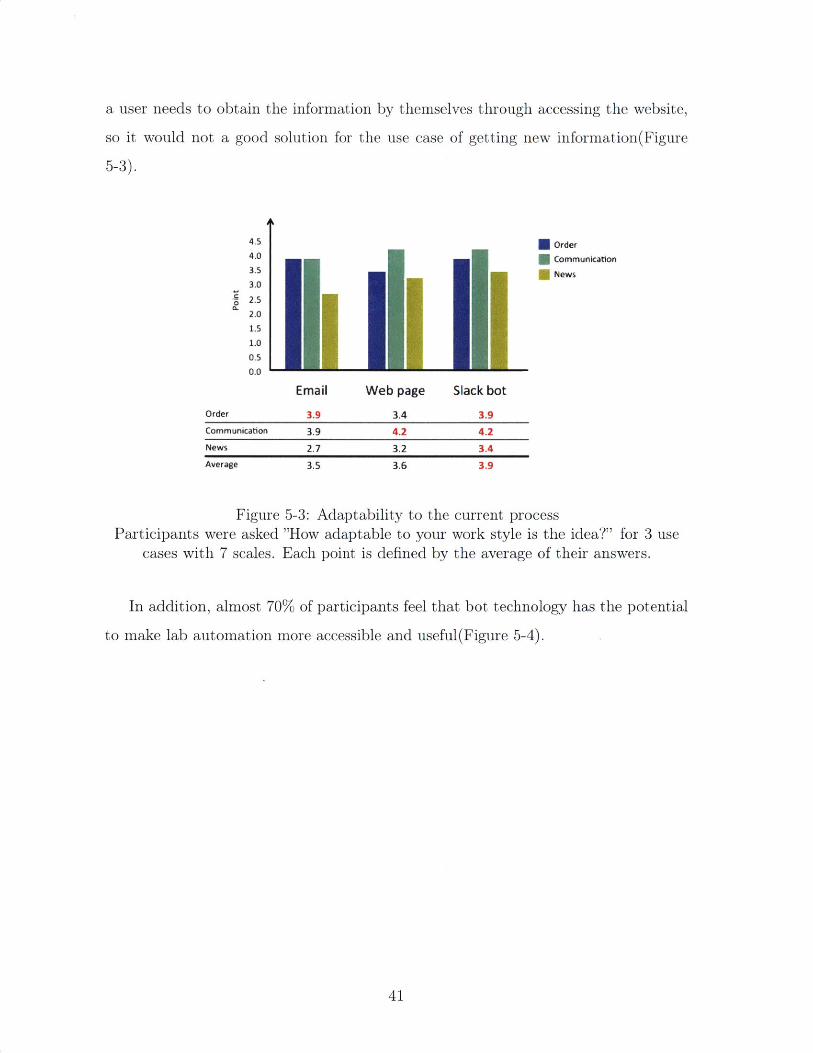
a user needs to obtain the information by themselves through accessing the website,
so it would not a good solution for the use case of getting new information(Figure
5-3).
4.54.03.53.0
S2.52.01.51.00.50.0
IEmail
IIWeb page
IISlack bot
OrderCommunicationNews
Order 3.9 3.4 3.9Communication 3.9 4.2 4.2News 2.7 3.2 3.4Average 3.5 3.6 3.9
Figure 5-3: Adaptability to the current processParticipants were asked "How adaptable to your work style is the idea?" for 3 use
cases with 7 scales. Each point is defined by the average of their answers.
In addition, almost 70% of participants feel that bot technology has the potential
to make lab automation more accessible and useful(Figure 5-4).
41

Strongly agree U Somehow agreeAgree Neither agree or disagree
Figure 5-4: Potential of bot technologyParticipants were asked "Do you think the bot technology has the potential to make
lab automation more accessible and useful?"
42

Chapter 6
Conclusion
This chapter describes the research summary and contribution. In addition, some
viewpoints and future works are mentioned for improving the user experience of lab
automation in the field of synthetic biology.
6.1 Summary and contribution of research
This research explored what kind of problems researchers feel in robotics automation
process and what kind of user experience would transform the lab culture toward to
lab automation. In the current automation process, the lab automation could be a
black box environment for researchers and it affects the reliability and also famil-
iarity of robotics automation process. According to the surveys and interviews for
researchers, the bot technology, a software robot that can make a conversation with
users through the internet, could be one of the solutions for accelerating the use of
robotics automation in the lab.
The contribution of this research are:
" An overview of user perception and needs for lab automation in the field of
synthetic biology.
" Proposal for the user-centered automated process that improves the productiv-
43

ity of synthetic biology research in the labs.
* Working prototype using the Slack bot that could collect data and reveals fur-
ther actions required for deploying the automated process.
6.2 Future work
6.2.1 System development
The prototype developed in this research supports the basic communication among
researchers, technicians, and robots. To make lab automation more usable, the system
should be more integrated with data management of lab automation and library
management of biological parts. To evaluate the efficiency and effectiveness of lab
automation, we need to collect the data of each experiment such as success rate
of DNA assembly, time spent for manual preparation and automated process, and
user satisfaction through the system. In addition, if the biological parts researchers
need for the automation process can be managed in the technician side, it would be
possible to make the communication process more simple and reduce the workload of
researchers for using the robot.
6.2.2 For self-operation
According to the survey conducted in this research, many people would want to use
a robot by themselves like 3D printer(3.2). The current system is based on the use
case that a technician handle the robot according to a researcher's order, but for the
future, the system should support researchers who want to use a robot by themselves
as well as the training program for them. For example, the system should support
troubleshooting or instruction that allows researchers to use a robot by themselves.
44

Bibliography
[1] Douglas Densmore and Soha Hassoun. Design automation for synthetic biologicalsystems, 2012.
[2] Julie Legault. Amino, a domestic system for synthetic biology and continuousculturing, 2015.
[3] Douglas M. Densmore and Swapnil Bhatia. Bio-design automation: software +biology + robots, 2014.
[4] Fusun Yaman, Aaron Adler, and Jacob Beal. How can ai help synthetic biology?,abstract for senior member talk, 2013.
[5] Steve C. C. Shiha and Christopher Moraes. Next generation tools to acceleratethe synthetic biology process, 2016.
[6] Viktor Vasilev, Chenkai Liu, Janoo Fernandes, Evelyn Orozco, Traci Haddock,Swapnil Bhatia, Aaron Adler, Fusun Yaman, Jacob Beal, Jonathan Babb, RonWeiss, and Douglas Densmore. A software stack for specification and roboticexecution of protocols for synthetic biological engineering, 2011.
[7] S. Bhatial, M.Gajda, V. Vasilev, D. Densmore, L. Ortiz, M. Pavan, D. Walsh,and P. Carr. Towards design-build automation in synthetic biology, poster atthe national science foundation update meeting, boston university, 2017.
[8j Evan Appleton, Jenhan Tao, Traci Haddock, and Douglas Densmore. Interactiveassembly algorithms for molecular cloning, 2014.
[9] Ernst Weber, Carola Engler, Ramona Gruetzner, Stefan Werner, and SylvestreMarillonnet. A modular cloning system for standardized assembly of multigeneconstructs, 2011.
[101 Orit Shaer, Consuelo Valdes, Sirui Liu, Kara Lu, Traci L. Haddock, SwapnilBhatia, Douglas Densmore, and Robert Kincaid. Moclo planner: Interactivevisualization for modular cloning bio-design, 2013.
[11] Michal Galdzicki, Kevin P Clancy, Ernst Oberortner, Matthew Pocock, Jacque-line Y Quinn, Cesar A Rodriguez, Nicholas Roehner, Mandy L Wilson, LauraAdam, J Christopher Anderson, Bryan A Bartley, Jacob Beal, Deepak Chan-dran, Joanna Chen, Douglas Densmore, Drew Endy, Raik Griinberg, Jennifer
45

Hallinan, Nathan J Hillson, Jeffrey D Johnson, Allan Kuchinsky, Matthew Lux,Goksel Misirli, Jean Peccoud, Hector A Plahar, Evren Sirin, Guy-Bart Stan, AlanVillalobos, Anil Wipat, John H Gennari, Chris J Myers, and Herbert M Sauro.The synthetic biology open language (SBOL) provides a community standardfor communicating designs in synthetic biology, 2014.
[12] Michael Zhang, James Alastair McLaughlin, Anil Wipat, and Chris J. Myers.SBOLDesigner 2: An intuitive tool for structural genetic design, 2017.
46





![Round schedule Notices issued by Ofcom under … · Airspan [REDACTED] EE [REDACTED] H3G [REDACTED] Telefonica [REDACTED] Vodafone [REDACTED] Bidder Eligibility events available (start](https://static.fdocuments.in/doc/165x107/5ba4d8c509d3f257608be093/round-schedule-notices-issued-by-ofcom-under-airspan-redacted-ee-redacted.jpg)

![Round results Notices issued by Ofcom under Wireless ... · Airspan [REDACTED] 34 34 EE [REDACTED] 16 16 H3G [REDACTED] 46 46 Telefonica [REDACTED] 37 37 Vodafone [REDACTED] 40 40](https://static.fdocuments.in/doc/165x107/5ba4d8c509d3f257608be079/round-results-notices-issued-by-ofcom-under-wireless-airspan-redacted.jpg)










![Signature redacted for privacy. - [email protected] Home](https://static.fdocuments.in/doc/165x107/61fb10252e268c58cd59b7e1/signature-redacted-for-privacy-emailprotected-home.jpg)