Abstraction Heuristics for Rubik’s Cube
60
Abstraction Heuristics for Rubik’s Cube Bachelor Thesis Abstraction Heuristics for Rubik’s Cube Clemens B¨ uchner Departement of Mathematics and Computer Science University of Basel June 8, 2018
Transcript of Abstraction Heuristics for Rubik’s Cube

Abstraction Heuristics for Rubik’s Cube
Bachelor Thesis
Abstraction Heuristics for Rubik’s Cube
Clemens Buchner
Departement of Mathematics and Computer ScienceUniversity of Basel
June 8, 2018

Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.

Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.

Abstraction Heuristics for Rubik’s Cube
Introduction
Planning: Figure out a sequence of actions that leads to a goal.
Abstraction Heuristics for Rubik’s Cube
Introduction
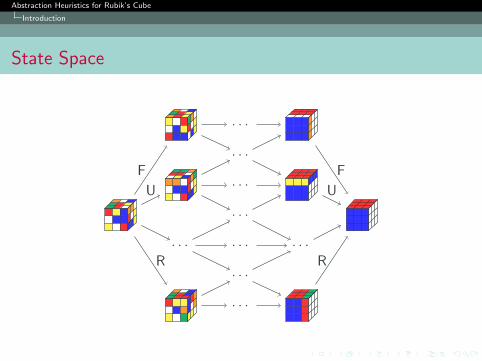
State Space
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
. . .
F
U
R
F
U
R
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Terminology
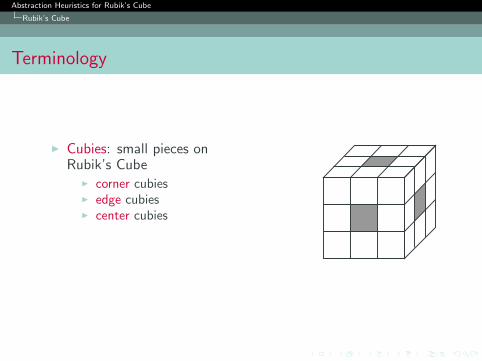
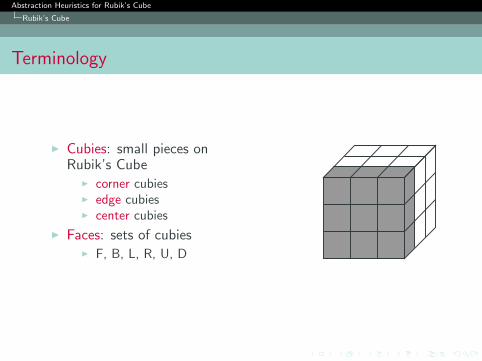
I Cubies: small pieces onRubik’s Cube
I corner cubiesI edge cubiesI center cubies
I Faces: sets of cubies
I F, B, L, R, U, D

Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Terminology
I Cubies: small pieces onRubik’s Cube
I corner cubies
I edge cubiesI center cubies
I Faces: sets of cubies
I F, B, L, R, U, D

Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Terminology
I Cubies: small pieces onRubik’s Cube
I corner cubiesI edge cubies
I center cubies
I Faces: sets of cubies
I F, B, L, R, U, D
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Terminology
I Cubies: small pieces onRubik’s Cube
I corner cubiesI edge cubiesI center cubies
I Faces: sets of cubies
I F, B, L, R, U, D
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Terminology
I Cubies: small pieces onRubik’s Cube
I corner cubiesI edge cubiesI center cubies
I Faces: sets of cubiesI F, B, L, R, U, D
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
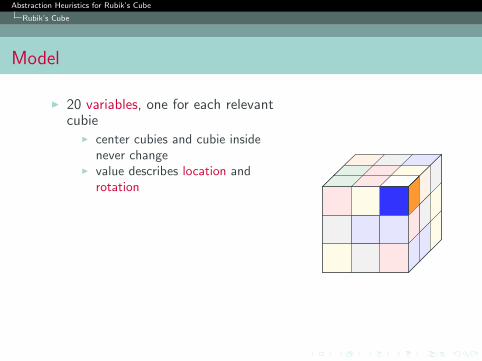
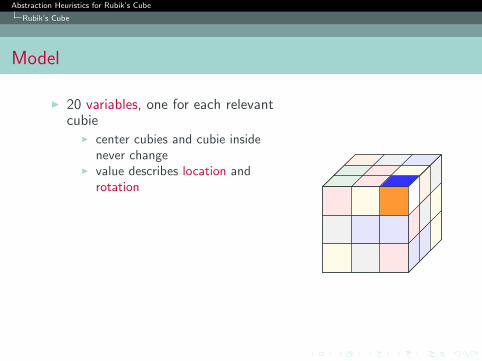
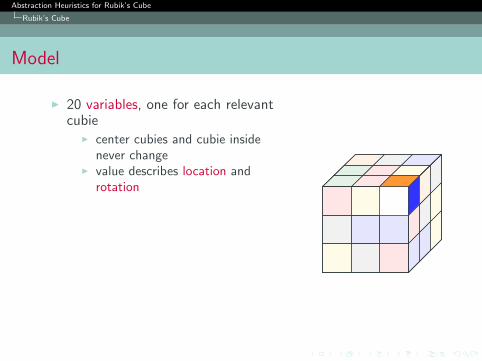
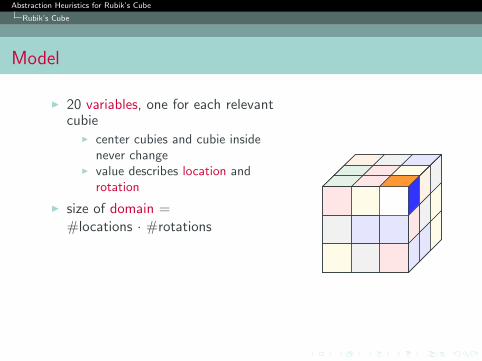
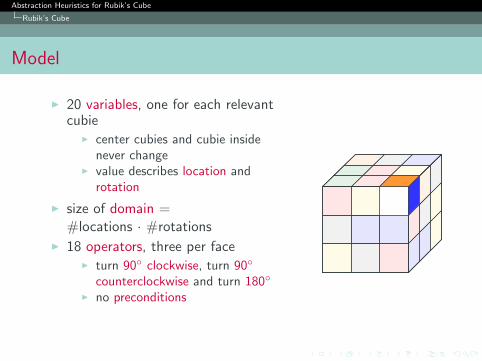
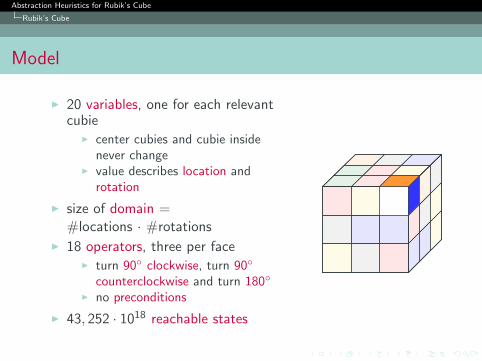
Model
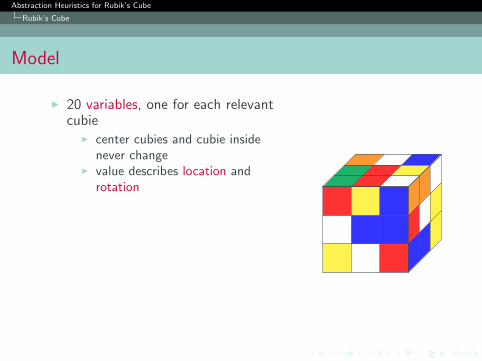
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states

Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Rubik’s Cube
Model
I 20 variables, one for each relevantcubie
I center cubies and cubie insidenever change
I value describes location androtation
I size of domain =#locations · #rotations
I 18 operators, three per faceI turn 90◦ clockwise, turn 90◦
counterclockwise and turn 180◦
I no preconditions
I 43, 252 · 1018 reachable states
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Abstraction Heuristics
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Abstractions
I disregard information on purpose
I combine states with similarities to abstract states
I always admissible → A∗ yields optimal plan
Abstraction Heuristics for Rubik’s Cube
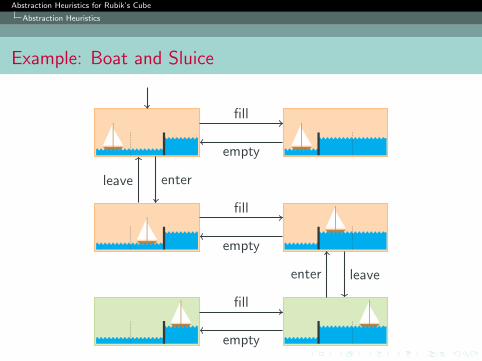
Abstraction Heuristics
Example: Boat and Sluice
fill
empty
enterleave
fill
empty
leaveenter
fill
empty

Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Projection
fill, empty
enterleave
fill, empty
leaveenter
fill, empty
Abstraction Heuristics for Rubik’s Cube
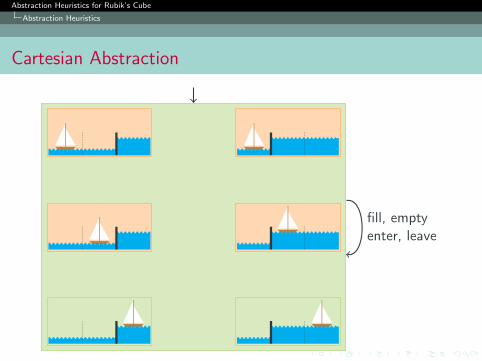
Abstraction Heuristics
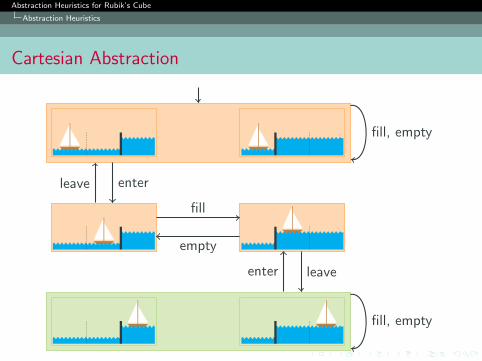
Cartesian Abstraction
fill, emptyenter, leave
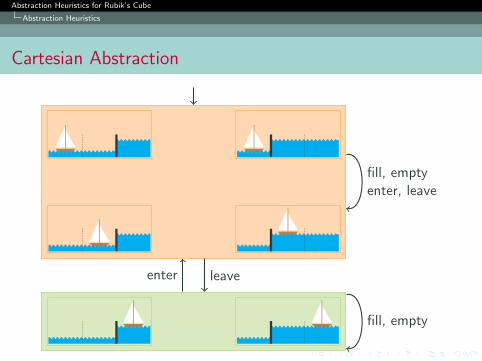
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Cartesian Abstraction
fill, emptyenter, leave
leaveenter
fill, empty
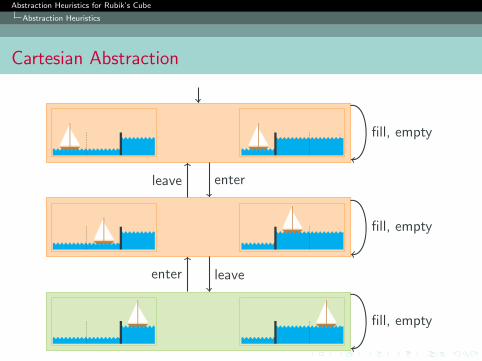
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Cartesian Abstraction
fill, empty
enterleave
fill, empty
leaveenter
fill, empty
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
Cartesian Abstraction
fill, empty
enterleave
fill
empty
leaveenter
fill, empty
Abstraction Heuristics for Rubik’s Cube
Abstraction Heuristics
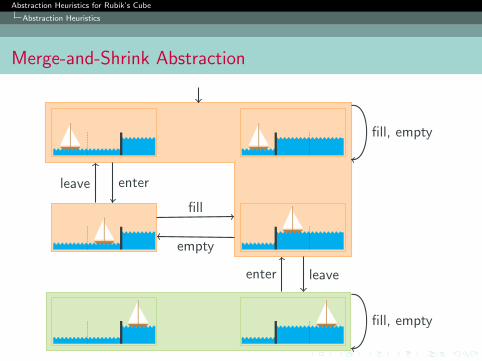
Merge-and-Shrink Abstraction
fill, empty
enterleave
fill
empty
leaveenter
fill, empty
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
Cartesian Abstraction Refinement
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
Regression
I regression of Cartesian Set not Cartesian
I no support for conditional effects
I Rubik’s Cube has only conditional effects
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
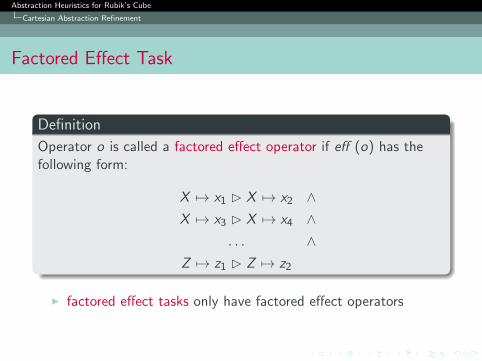
Factored Effect Task
Definition
Operator o is called a factored effect operator if eff (o) has thefollowing form:
X 7→ x1 B X 7→ x2 ∧X 7→ x3 B X 7→ x4 ∧
. . . ∧Z 7→ z1 B Z 7→ z2
I factored effect tasks only have factored effect operators
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
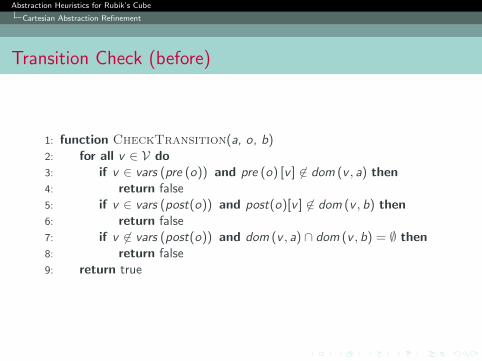
Transition Check (before)
1: function CheckTransition(a, o, b)2: for all v ∈ V do3: if v ∈ vars (pre (o)) and pre (o) [v ] 6∈ dom (v , a) then4: return false5: if v ∈ vars (post(o)) and post(o)[v ] 6∈ dom (v , b) then6: return false7: if v 6∈ vars (post(o)) and dom (v , a) ∩ dom (v , b) = ∅ then8: return false9: return true
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
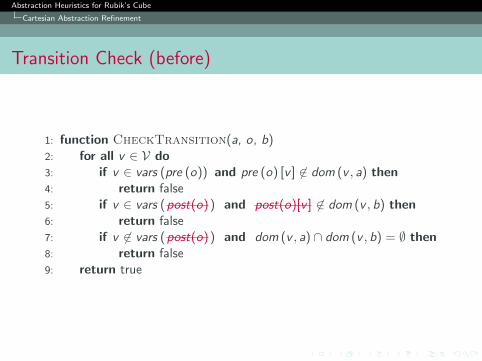
Transition Check (before)
1: function CheckTransition(a, o, b)2: for all v ∈ V do3: if v ∈ vars (pre (o)) and pre (o) [v ] 6∈ dom (v , a) then4: return false5: if v ∈ vars (post(o)) and post(o)[v ] 6∈ dom (v , b) then6: return false7: if v 6∈ vars (post(o)) and dom (v , a) ∩ dom (v , b) = ∅ then8: return false9: return true
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
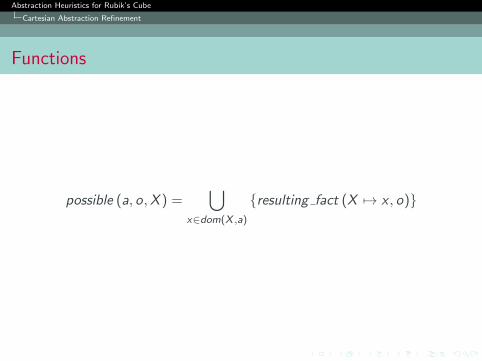
Functions
possible (a, o,X ) =⋃
x∈dom(X ,a)
{resulting fact (X 7→ x , o)}
Abstraction Heuristics for Rubik’s Cube
Cartesian Abstraction Refinement
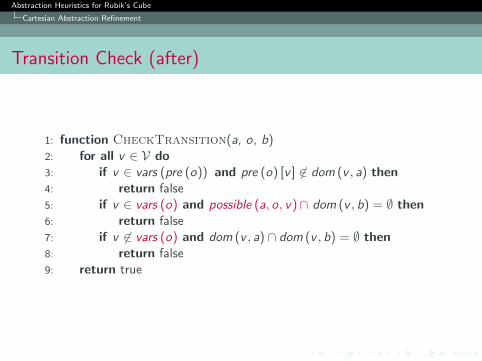
Transition Check (after)
1: function CheckTransition(a, o, b)2: for all v ∈ V do3: if v ∈ vars (pre (o)) and pre (o) [v ] 6∈ dom (v , a) then4: return false5: if v ∈ vars (o) and possible (a, o, v)∩ dom (v , b) = ∅ then6: return false7: if v 6∈ vars (o) and dom (v , a) ∩ dom (v , b) = ∅ then8: return false9: return true

Abstraction Heuristics for Rubik’s Cube
Evaluation
Evaluation
Abstraction Heuristics for Rubik’s Cube
Evaluation
Setup
I 200 problem instances of different difficultiesI seven heuristics
I Blind Search Heuristic as a baselineI different Pattern Database heuristicsI Cartesian Abstraction with conditional effectsI Merge-and-Shrink
Abstraction Heuristics for Rubik’s Cube
Evaluation
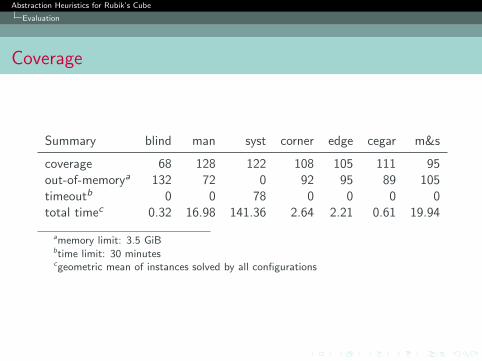
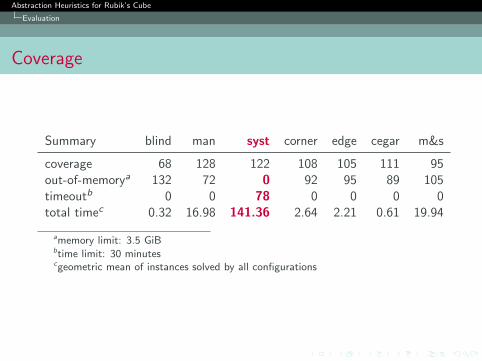
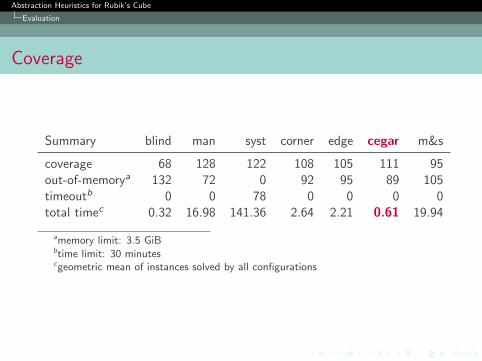
Coverage
Summary blind man syst corner edge cegar m&s
coverage 68 128 122 108 105 111 95out-of-memorya 132 72 0 92 95 89 105timeoutb 0 0 78 0 0 0 0total timec 0.32 16.98 141.36 2.64 2.21 0.61 19.94
amemory limit: 3.5 GiBbtime limit: 30 minutescgeometric mean of instances solved by all configurations

Abstraction Heuristics for Rubik’s Cube
Evaluation
Coverage
Summary blind man syst corner edge cegar m&s
coverage 68 128 122 108 105 111 95out-of-memorya 132 72 0 92 95 89 105timeoutb 0 0 78 0 0 0 0total timec 0.32 16.98 141.36 2.64 2.21 0.61 19.94
amemory limit: 3.5 GiBbtime limit: 30 minutescgeometric mean of instances solved by all configurations
Abstraction Heuristics for Rubik’s Cube
Evaluation
Coverage
Summary blind man syst corner edge cegar m&s
coverage 68 128 122 108 105 111 95out-of-memorya 132 72 0 92 95 89 105timeoutb 0 0 78 0 0 0 0total timec 0.32 16.98 141.36 2.64 2.21 0.61 19.94
amemory limit: 3.5 GiBbtime limit: 30 minutescgeometric mean of instances solved by all configurations
Abstraction Heuristics for Rubik’s Cube
Evaluation
Coverage
Summary blind man syst corner edge cegar m&s
coverage 68 128 122 108 105 111 95out-of-memorya 132 72 0 92 95 89 105timeoutb 0 0 78 0 0 0 0total timec 0.32 16.98 141.36 2.64 2.21 0.61 19.94
amemory limit: 3.5 GiBbtime limit: 30 minutescgeometric mean of instances solved by all configurations
Abstraction Heuristics for Rubik’s Cube
Evaluation
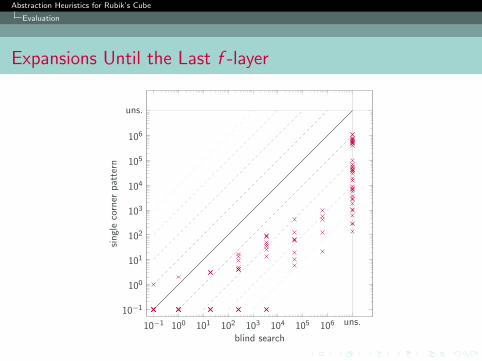
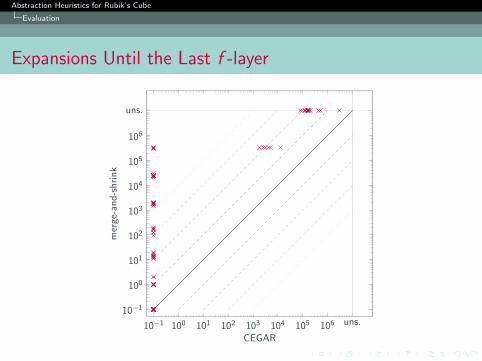
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105 106
10−1
100
101
102
103
104
105
106
uns.
uns.
blind search
sin
gle
corn
erp
atte
rn
Abstraction Heuristics for Rubik’s Cube
Evaluation
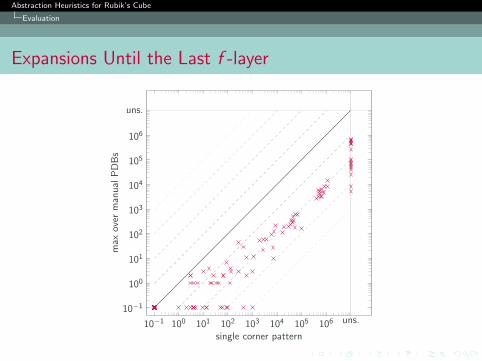
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105 106
10−1
100
101
102
103
104
105
106
uns.
uns.
single corner pattern
max
over
man
ual
PD
Bs
Abstraction Heuristics for Rubik’s Cube
Evaluation
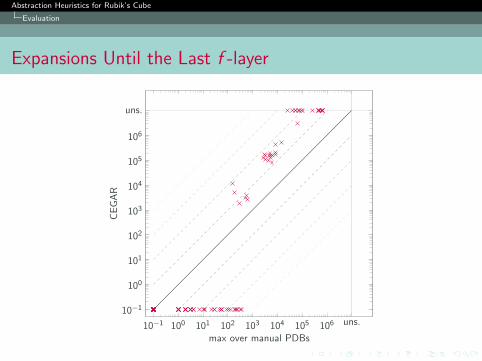
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105 106
10−1
100
101
102
103
104
105
106
uns.
uns.
max over manual PDBs
CE
GA
R
Abstraction Heuristics for Rubik’s Cube
Evaluation
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105 106
10−1
100
101
102
103
104
105
106
uns.
uns.
CEGAR
mer
ge-a
nd
-sh
rin
k
Abstraction Heuristics for Rubik’s Cube
Evaluation
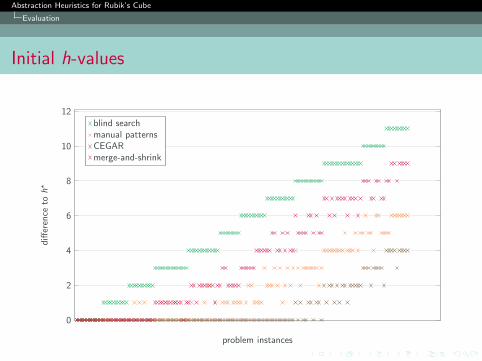
Initial h-values
0
2
4
6
8
10
12
problem instances
diff
eren
ceto
h?
blind searchmanual patternsCEGARmerge-and-shrink
Abstraction Heuristics for Rubik’s Cube
Conclusion
Summary
I factored effect tasks can be abstracted with CEGAR
I PDBs find most solutions with least expansions
I CEGAR is fast and yields perfect heuristic values

Abstraction Heuristics for Rubik’s Cube
Conclusion
Thank you for your attention.
Abstraction Heuristics for Rubik’s Cube
Appendix
Planning Tasks
Definition
A planning task is a 4-tuple Π = 〈V, I ,O, γ〉 where
I V is a finite set of finite-domain state variables,
I I is a state over V called the initial state,
I O is a finite set of finite-domain operators over V, and
I γ is a formula over V called the goal.
I operators o ∈ O with precondition pre(o), effect eff (o), andcost cost(o)

Abstraction Heuristics for Rubik’s Cube
Appendix
Locations
I coordinate systemI distinguish categories
I corner cubies and edge cubies
0
1
2
3
4 6
70
1
2
3
4 6
7
9
11

Abstraction Heuristics for Rubik’s Cube
Appendix
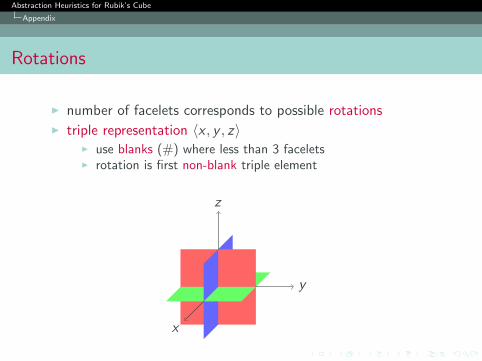
Rotations
I number of facelets corresponds to possible rotationsI triple representation 〈x , y , z〉
I use blanks (#) where less than 3 faceletsI rotation is first non-blank triple element
x
y
z
Abstraction Heuristics for Rubik’s Cube
Appendix
Rotations
I number of facelets corresponds to possible rotationsI triple representation 〈x , y , z〉
I use blanks (#) where less than 3 faceletsI rotation is first non-blank triple element
x
y
z
Abstraction Heuristics for Rubik’s Cube
Appendix
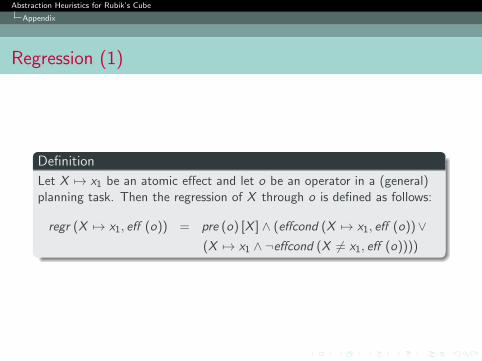
Regression (1)
Definition
Let X 7→ x1 be an atomic effect and let o be an operator in a (general)planning task. Then the regression of X through o is defined as follows:
regr (X 7→ x1, eff (o)) = pre (o) [X ] ∧ (effcond (X 7→ x1, eff (o))∨(X 7→ x1 ∧ ¬effcond (X 6= x1, eff (o))))

Abstraction Heuristics for Rubik’s Cube
Appendix
Regression (2)
regr (X 7→ x2, o) = pre (o) [X ] ∧
∨〈X 7→x1,X 7→x2〉∈
effects(o)
X 7→ x1∨
X 7→ x2
if X 7→ x2 does notoccur as an effectcondition in o
⊥ otherwise
regr (X , o) =
⋃x∈X
regr (X 7→ x , o)
regr (a, o) = A1 × · · · × An where Ai = regr (dom(vi , a), o)
Abstraction Heuristics for Rubik’s Cube
Appendix
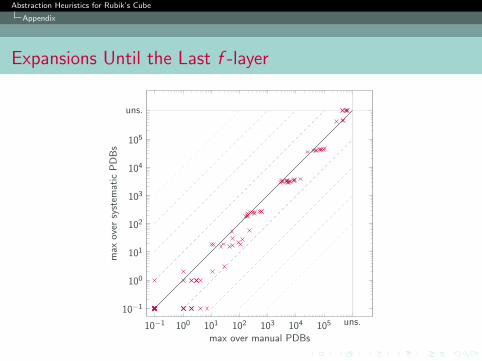
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105
10−1
100
101
102
103
104
105
uns.
uns.
max over manual PDBs
max
over
syst
emat
icP
DB
s
Abstraction Heuristics for Rubik’s Cube
Appendix
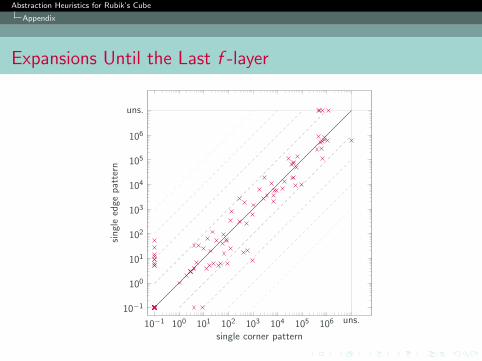
Expansions Until the Last f -layer
10−1 100 101 102 103 104 105 106
10−1
100
101
102
103
104
105
106
uns.
uns.
single corner pattern
sin
gle
edge
pat
tern