Tavakkoli, Mehdi; Fattaheian-Dehkordi, Sajjad; Pourakbari ...

Aalborg Universitet
Distributed Noise-resilient Secondary Voltage and Frequency Control for IslandedMicrogrids
Dehkordi, Nima Mahdian; Baghaee, Hamid Reza; Sadati, Nasser; M.Guerrero, Josep
Published in:IEEE Transactions on Smart Grid
DOI (link to publication from Publisher):10.1109/TSG.2018.2834951
Publication date:2019
Document VersionAccepted author manuscript, peer reviewed version
Link to publication from Aalborg University
Citation for published version (APA):Dehkordi, N. M., Baghaee, H. R., Sadati, N., & M.Guerrero, J. (2019). Distributed Noise-resilient SecondaryVoltage and Frequency Control for Islanded Microgrids. IEEE Transactions on Smart Grid, 10(4), 3780 - 3790.https://doi.org/10.1109/TSG.2018.2834951
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
? Users may download and print one copy of any publication from the public portal for the purpose of private study or research. ? You may not further distribute the material or use it for any profit-making activity or commercial gain ? You may freely distribute the URL identifying the publication in the public portal ?
Take down policyIf you believe that this document breaches copyright please contact us at [email protected] providing details, and we will remove access tothe work immediately and investigate your claim.

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
1
Distributed Noise-resilient Secondary Voltage andFrequency Control for Islanded Microgrids
Nima Mahdian Dehkordi, Hamid Reza Baghaee, Member, IEEE, Nasser Sadati, Member, IEEE,and Josep M. Guerrero, Fellow, IEEE
Abstract—This paper proposes a novel distributed noise-resilient secondary control for voltage and frequency restorationof islanded microgrid inverter-based distributed generations(DGs) with an additive type of noise. The existing distributedmethods commonly are designed as secondary control systemsystems that operate on the assumption of ideal communicationnetworks among DGs. However, the channels are prone tostochastic noise, whereas each DG obtains noisy measurementsof the states of its neighbors via environmental noises. Theexisting distributed noise-resilient methods, ignore a completemodel of the system. In contrast, this paper proposes consensusprotocols that take into account both the noisy measurements anda complete nonlinear model of the system, examines the mean-square average consensus for voltage and frequency restorationof islanded AC microgrids in an uncertain environment, andprovides accurate proportional real power sharing. Our pro-posed consensus protocol contains two parts: the state feed-back of the agent and the relative states of the DG and itsneighboring DGs. Finally, simulation studies are carried out inMATLAB/SimPowerSystems to evaluate the performance of thecontrol laws. Simulation results and comparison with previouswork reveals the effectiveness of the proposed method in regu-lating microgrid voltage and frequency and providing accurateproportional real power sharing.
Index Terms—Distributed generation, distributed noise-resilient secondary control, mean-square average consensus,microgrids, multi-agent systems, power sharing, stochastic net-works.
I. INTRODUCTION
A. Motivation and Incitement
The concept of a smart microgrid has emerged from the highpenetration of renewable and non renewable-based distributedgeneration (DG) units and energy storage systems (ESS) [1]. Amicrogrid is a small-scale, low-voltage power grid in the lowvoltage designed to solve energy issues locally and enhanceflexibility. These systems can function in either grid-connectedor islanded (autonomous) modes of operation [2], [3]. Despitethe inherent benefits of microgrids, they present technicalchallenges regarding their power management, control, andprotection systems [4], [5].
The control strategy of microgrids works on the basis ofa hierarchical control scheme, that includes primary/inner
N. Mahdian is with the Department of Electrical and Computer Engineering,Science and Research Branch, Islamic Azad University, Tehran, Iran (e-mail: [email protected]). H. R. Baghaee is with the Departmentof Electrical Engineering, Amirkabir University of Technology, Tehran, Iran([email protected]). N. Sadati is with the Department of Electrical Engi-neering, Sharif University of Technology, Tehran, Iran ([email protected]).J. M. Guerrero is with the Department of Energy Technology, AalborgUniversity, 9220 Aalborg East, Denmark ([email protected]).
controllers and secondary and tertiary control levels [5]–[7].Previous secondary control strategies were proposed based oncentralized control (with low reliability) [8], [9], decentralizedcontrol (with high reliability and reasonable cost) [4]–[7], [10],[11] and distributed control (with high reliability and lowcost) [12]–[22]. The idea of distributed control is inspiredpartly by the idea of cooperative control for multi-agentsystems (MASs) and is based on communication among localcontrollers (LC) that share information with neighboring unitsvia local communication networks [23], [24].
B. Literature Review
Dissipated Control architecture has been used for controland power management of microgrids including DG units andESSs [14], [15]. In [25], the nonlinear dynamics of the DGunits are relaxed using the feedback linearization method intolinear dynamics and the conventional into linear secondarycontrol system is altered to initiate the distributed secondarycontrol level on the basis of a first-order tracking synchro-nization problem, to provide voltage/frequency control andreal/reactive power sharing. This idea has been used in [16]as well, although this study does not consider reactive powersharing. This issue is well addressed in [26], which exploresindependent from voltage measurements and mismatches andline impedance uncertainties, with the result that each DGunit takes the averaged value of reactive power of all unitsas its own set point to finish the update process. However,there is no clear picture of the relative errors of voltageregulations and reactive power sharing. Some issues, suchas communication system uncertainties [27], communicationtime delay [28], networked variability [29], and measure-ment noise [17], [30] (which is the subject of this paper),affect the performance and stability of distributed secondarycontrollers. The effects of the time delay on primary andsecondary control levels in a hierarchical structure have beenstudied in [28], [31], [32], respectively. The existing distributedcontrol paradigms assume the existence of ideal, noise-freecommunication among inverters. In practice, communicationchannels are corrupted by additive noise. Environmental eventssuch as rain also can introduce noise into communicationchannels. As a case in point, in wireless communications,when an additive noise (that can be statistically modeled asGaussian in nature) is generated in the receiver front end, thesurrounding noise can be picked up by the antenna [33]. In azero-mean white noise model with a nominal threshold of 0.05for frequency deviation, small deviations can affect sensitive

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
2
electronics loads adversely, whereas larger deviations can leadto circulating currents and potentially can destabilize the mi-crogrid [34]. This issue is discussed for a noise MAS in [35],[36]. Most of the previously reported distributed secondarycontrol methods have been presented based on small-signalmodeling and thus do not respond efficiently to large-signaldisturbances [19], [20], [26], [37], [38]. Moreover, from apractical perspective the microgrid is parametrically uncertainand structurally unknown. Therefore, unlike [12], [19], [26],[39], the unmodeled dynamics, unknown disturbances, andsystem uncertainties shall be considered in this study in thedesign of the microgrid control system.
The reported distributed control techniques have been pre-sented almost based on assuming an ideal, noise-free com-munication among inverters. The communication channelsare practically corrupted by additive noise [33]. In wirelesscommunications, an additive noise will be generated in thereceiver front end and surrounding noise picked up by theantenna. Environmental causes such as rain, can also introducenoise in to communication channels. In another category,the additive noise associated with electronic components andamplifiers at the receiver end is classified as thermal noiseand statistically modeled as Gaussian in nature [33]. In thispaper, without loss of generality, noise is considered to bezero mean white Gaussian. In the presence of noise (thatespecially disrupt the frequency synchronization), consensuson the desired set point is not warranted [40]. Given thenominal threshold of ± 0.5 Hz on frequency deviation [40],small deviation can adversely affect the sensitive electronicsloads, while larger deviations can result in circulating currentsand can potentially destabilize the microgrid. The effect ofnoise and distributed estimators for a noisy multi-agent systemhave been studied in [35], [36].
C. Contribution and OrganizationIn this paper, we propose a new distributed noise-resilient
secondary control scheme to regulate the voltage and fre-quency of an autonomous multi-DG AC imicrogrid whiletaking into consideration additive communication noise. Weassume the communication channels are prone to stochasticnoise; thus, the LCs receive noisy measurements from theirneighboring units as a result of exterior environmental noises.In contrast to the previously reported distributed noise-resilientcontrol strategies, in this paper we use detailed nonlinearmodel of the system to propose a consensus protocol thatincorporates noisy measurement by exploiting mean squareaverage consensus values of voltage and frequency signalsin an uncertain environment and providing proportional ac-curate real power sharing. The presented consensus protocolcomprises a state feedback agent, and moreover, the relativestates between a DG unit and its neighbors (which normallyare affected by communication noises and thus cannot bemeasured exactly). The presented consensus protocol consistsof state feedback agent and moreover, relative states between aDG unit and its neighbor units (which is normally affected bycommunication noises and thus, cannot be measured exactly).We can summarize the main features of the proposed methodas follows:
1) Several presented models suffer from incomplete plantdynamics because they ignore the inner controllers im-pact on the secondary control, thus affecting both thestability and performance of high-power converters. Tothe best of the authors knowledge, this paper is the firstto propose a new distributed noise-resilient secondarycontrol for both voltage and frequency restoration of anislanded microgrid based on consideration of a completenonlinear system model, irrespective of parametric un-certainties and noise parameters.
2) From a practical perspective, noise parameters and themicrogrid parameters, such as line impedances, loads,other parameters of DG unit, and the microgrid configu-ration are unknown. Unlike existing distributed methodsthat require a detailed model of the system, the pro-posed protocols are designed by considering unmodeleddynamics, unknown noises and uncertainties in theirmodels. Therefore, this modeling leads to controllersbeing independent of the DG parameters and noise type.
3) In the case of frequency restoration, the distributednoise-resilient control meets the power sharing accuracyin the presence of any type of noise.
4) Compared with the conventional distributed controllers,the proposed method rapidly reaches consensus andshows a more accurate robust performance for controlleractivation, structure reconfiguration, and load changes.Also, it is fully independent of DG parameters (lineimpedances, loads, and other DG units parameters) andnoise type.
5) Easy implementation of the proposed protocols on dig-ital hardware devices under both uncertain and fixedcommunication networks facilitates fulfillment of theplug-and-play capability of intermittent DG units in thepresence of noise.
The theoretical concepts and necessary conditions for stabil-ity and robust performance of the proposed distributed noise-resilient secondary control scheme are outlined and effective-ness of the proposed scheme is evaluated by offline time-domain simulations in MATLAB/Simulink environment. Therest of this paper is organized as follows: section II describesthe preliminaries of graph theory, DG unit modeling, andmicrogrid and problem formulation. The proposed distributednoise-resilient secondary scheme for voltage and frequencyis presented in sections III and IV, respectively. Verificationof the performance of the proposed method based on offlinetime-domain simulations is presented in section V. Finally,conclusions and discussions are presented in sections VI.
II. PRELIMINARIES AND PROBLEM FORMULATION
A. Preliminary of Graph Theory
The communication topology among DGs can be modeledby a weighted directed graph (digraph) G = (NG, EG, AG),where NG = 1, 2, ..., N is the node set, EG ⊂ NG × NG
is the edge set, and AG ∈ RN×N with non negative elementsaij is a weighted adjacent matrix. Between two DGs, the edgeof the communication network eij = (i, j) ∈ EG exists if andonly if aij > 0 or there is an information flow from DGi to

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
3
DGj ; otherwise, aij = aji = 0. Moreover, there is no self-loop in the graph, that is aii = 0 for all i ∈ NG. The setof neighbors of node i is represented by Nci = j ∈ NG :(i, j) ∈ EG, j /∈ i.
The graphed Laplacian matrix L = [Lij ] ∈ RN×N is definedby Lii =
∑j =i aij and Lij = −aij [41]. A path from node i
to node j is a sequence of edges eik, eil, ..., emj . The digraph(the corresponding network) contains a directed spanning tree,if there is a root node that has a directed path connectingany two arbitrary nodes in the graph. The communicationgraph is connected if the graph has a spanning tree. For adigraph, if node i is a neighbor of node j, then node j receivesinformation from node i but not necessarily vice versa [41].
For the leader-following multiagent system with N fol-lowers, the adjacency matrix of the leader is described asg = [g1, g2, ..., gN ]T ∈ RN . If agent i is a neighbor of theleader, gi = 1; otherwise, gi = 0 [41].
B. Dynamic Modeling of DGs
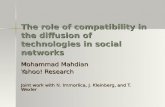
Fig. 1 illustrates the layout of a typical inverter-basedmicrogrid in islanded-mode operation, which is the mainfocus of this paper. The microgrid system consists of thephysical, communication network, and control layers. Thephysical layer contains dispatchable sources, including thevoltage source converter (VSC), series LCL filter, transmissionlines, loads and power, voltage, and current control loops. Tofacilitate data exchange among DGs, a sparse communicationnetwork layer with at least a spanning tree is spanned amongthe DGs. We selected this communication network so thatin the case of a communication link failure, the remainingnetwork would still contain a spanning tree. Several presentedmodels (specially [17]) suffer from incomplete plant dynamicsbecause they ignore the effect of the inner controllers onthe secondary control and thus, affecting both the stabilityand performance of high-power converters. To the best ofthe authors knowledge, this paper is the first to propose anew distributed noise-resilient secondary control (motivated by[41]) for both voltage and frequency restoration of an islandedmicrogrid based on consideration of a complete nonlinearsystem model, irrespective of parametric uncertainties andnoise parameters.
We can achieve coordination of the primary controller byconsidering dynamics of the real and reactive power drooptechniques as
ωi = ωni −mPiPi
v∗odi = Vni − nQiQi
v∗oqi = 0, (1)
where Vni and ωni are, respectively, the reference voltage andfrequency provided for the internal control loops. Pi and Qi
are the ith DG’s real and reactive powers. mPi and nQi arethe static droop gains evaluated based on the inverter ratings.
From [16], the dynamical model of each DG and its internalcontrol loops can be written respectively in the following
forms
xi = fi(xi) + gi1(xi)ui1 + gi2(xi)ui2 + ki(xi)Di
yi1 = vodi = hi1(xi)
yi2 = ωi = ωni −mPiPi = hi2(xi) + diui2, (2)
where xi = [αi Pi Qi iLdi iLqi vodi voqi iodi ioqi]T and αi
is the angle of the DG reference frame with respect to thecommon reference frame.
Based on the nonlinear model, the control inputs Vni andωni will be designed in the next section so that vodi and ωi
are regulated to the desired values.
III. DISTRIBUTED NOISE-RESILIENT SECONDARYVOLTAGE CONTROL
Because of the existence of communication noises amongDGs, synchronization of voltage and frequency cannot beachieved appropriately. In this section, we use a fully dis-tributed noise-resilient secondary voltage control to selectproper control inputs Vni in (2) to synchronize the DGunits’ voltage magnitude, vo,magi, to the reference value vref(irrespective of the noise type), where only information fromneighboring units is required. In our proposed method, it doesnot matter whether what kind of noises is considered
Motivated by the dynamical model of the open loop system(2), we employ the partial feedback linearizing method totransform the nonlinear system (2) into a partially linearsystem as follows:
yi1 = L2fihi1 + Lgi1Lfi1hi1ui1
µi1 = Wi1(yi1, µi1),∀i, (3)
where Lf(x)h(x) =∂h(x)
∂xf(x) represents the Lie derivative
[42] of h(x) along f(x) and µi1 ∈ Rni1 represents theset of internal dynamics that are asymptotically stable [25].Therefore, equation (3) is written as follows:
yi1 = yi1,2
yi1,2 = fi(xi) + gi(xi)ui1, ∀i. (4)
Let vi = fi(xi) + gi(xi)ui1. Then we can present (4) as
yi1 = yi1,2
yi1,2 = vi, ∀i (5)
or in matrix form
yi = Ayi +Bvi, ∀i, (6)
where yi = [yi1 yi1,2]T , A =
[0 1
0 0
], and B = [0 1]T . The
reference generator’s dynamics (the leader) can be expressedas
y0 = Ay0, (7)
where y0 = [vref vref ]T .

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
4
LCL
Filter
Inner voltage and
current loops
vo io
Droop Control
iL
Line1
VSC
Energy
Source
Secondary control
Droop ControlSecondary controlInner voltage and
current loops
Line2
Microgrid
DG #1
DG #2
Fig. 1. General layout of an inverter-based microgrid.
A. Control Law
Based on the findings in [41], we suggest the followingdistributed consensus-based noise-resilient secondary voltageprotocol:
vi = k1(yi − y0) + a(t)∑
j∈Nci
aijk2Yij(t), (8)
where Yij = yi − yj + Λijσij ; Λij is noise intensity; σij isindependent standard white noise, k1 = [−a1,−a2− b1]; k2 =[b1, b2], [b1, b2] are control parameters to be determined; anda(t) is the consensus gain, which satisfies [41]∫ ∞
0
a(s)ds = ∞ and
∫ ∞
0
a2(s)ds < ∞. (9)
Moreover, the role of the coefficient a(t) is to attenuate thenoise effects as t → ∞. Let ev = [eT1 , · · · , eTn ]T . Therefore,we define the global error vector ev as
ev = (L⊗ In)
yi − y0
...yN − y0
, (10)
where In and ⊗ represent the unit matrix of size n and Kro-necker product, respectively. Substituting for vi from (8) into(6) and pursuant to the theory of Ito′ stochastic differentialequation, we have
dev(t) = (IN ⊗ (A+Bk1)− a(t)L⊗Bk2)ev(t)dt
+ a(t)ΣdW (t), (11)
in which W (t) ∈ Rn2
is a standard Winnerprocess; Σ ∈ Rn×n2
is a constant matrixrepresented by Σ = diag(Σ1, .....,Σn) in whichΣi = [ai1Bk2Λ1i, ..... , ainBk2Λ1n]. Using Ito′ integralformula [41], the solution of (11) can be obtained as follows:
ev(t) = ϕev (t, 0)ev(0) +
∫ t
0
a(s)ϕev (t, s)ΣdW (s), (12)
where ϕev (t, s) is the state transition matrix of the differentialequation (11). ev(t) converges in the mean square to a ran-dom vector V ∗ = (v∗11, ..., v
∗1n, ..., v
∗N1..., v
∗Nn). From [41], it
follows that
E(V ∗) = limt→∞
E(ev(t)) = limt→∞
ϕev (t, 0)ev(0)
+ limt→∞
E(
∫ t
0
a(s)ϕev (t, s)ΣdW (s))
= ϕ∞ev(0) (13)
Therefore, we obtain
E(v∗11) = ... = E(v∗N1) =
N∑i=1
mi(ei1(0) +b2b1), (14)
and E(v∗12) = ... = E(v∗1n)= ... = E(v∗N2)= ... = E(v∗Nn) = 0.Accordingly, E(V ∗) is jointly determined by the initial statesof the DGs and the communication topology among them. Ina similar way, we prove that
E((V ∗ − E(V ∗)(V ∗ − E(V ∗)T )
= limt→∞
∫ t
0
a2(s)ϕe(t, s)ΣΣTϕT
e (t, s)ds
= limt→∞
∫ ∞
0
a2(s)ϕ∞ΣΣTϕT∞ds. (15)
It follows that
D(v∗i1) =
∫ ∞
0
a2(s)dsN∑i=1
m2i
∑j∈Nci
α2ij(η
2ij1 +
b22b21η2ij2)
≡ Ω. (16)
D(v∗ik) = 0, Cov(v∗i1, v∗j1) = Ω, and Cov(v∗i1, v
∗jk) = 0
(∀i, j = 1, ..., N ; k = 2, ..., N ). Therefore, we can obtain thatlimt→∞ E(eij(t)−v∗ij)
2 = limt→∞ E(eij(t)−v∗1j)2 = 0 (i =
1, ..., N ; j = 1, ..., N). Therefore, our proposed method cansolve the distributed mean square consensus.
As shown above, our proposed consensus protocol containstwo parts: 1) the state feedback of the agent and 2) the relativestates between the DG and its neighbor DGs. Because of the

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
5
existence of communication noises among DGs, the relativestates cannot be obtained exactly. Therefore, the time-varyinggain a(t) attenuates the effects of noise. The following mmsummarizes the results of this section:
Theorem 3.1: The protocol
Vni = ui1 =1
gi(xi)(vi − fi(xi))
vi = k1(yi − y0) + a(t)∑
j∈Nci
aijk2Yij(t) (17)
can guarantee that the DG output voltage, vo,magi, tracksthe reference value vref irrespective of stochastic noise incommunication channels. Fig. 2 depicts block diagram ofthe distributed cooperative noise-resilient secondary voltagecontrol.
Proof: Equations (3)-(16) prove the theorem.
niV
+
+
,mag iV
ix-
+
iy
0y
1
(x )i ig
1
s
(x )i if
(t)ij ijs L
1 0 2(y y ) a(t) [Y (t)]ci
i ij ijj Nk a k
Î- + å DG #i
Fig. 2. Block diagram of the distributed noise-resilient secondaryvoltage control
IV. DISTRIBUTED NOISE-RESILIENT SECONDARYFREQUENCY CONTROL
In this section, we use a fully distributed noise-resilientsecondary frequency control to design the proper protocolinputs ωni in (2) to synchronize the DGs’ frequency, ωi, to thereference value ωref (irrespective of the noise type), whereonly information from neighboring units is required. As inthe previous section, we employ the consensus algorithm andfeedback linearization approach to ensure convergence. Wenote that the primary control ensures real power sharing amongDGs as in (18); thus, after applying the proposed protocols,both frequency restoration and proportional real power sharingshould be achieved as follows
Pj
Pi=
mpi
mpj, ∀i, j ∈ N. (18)
Therefore, the mean square consensus protocol designs ui2
in (2) so that yi2 −→ ωref . As in the previous section, weemploy the partial feedback linearizing method to transformthe nonlinear system (2) into a partially linear system asfollows:
yi2 = Lfihi2 + Lgihi2ui2 + diui2
µi2 = Wi2(yi2, µi2), (19)
where µi2 ∈ Rni2 is the set of internal dynamics thatare asymptotically stable [25]. In this case, we obtain thefollowing equation:
yi2 = ωi = ωni −mPi Pi. (20)
We now define the auxiliary control uωi as
uωi = ωni −mPi Pi, (21)
which can be substituted into (20) to produce the followinglinear systems:
ωi = uωi , i = 1, 2, ..., N. (22)
We assumed that DGs communicate with each anotherthrough the noisy communication digraph G. Therefore, theproposed protocols design ui2 in (2) yields yi2 −→ ωref
and mpjPj −→ mpiPi, ∀i. As in the previous section,we consider the following distributed consensus-based noise-resilient secondary frequency protocol, uωi, based on itsown information and the information of its neighbors onthe communication graph so that the angular frequency ofeach DG, ωi, synchronizes to its nominal value, ωref , whileguaranteeing real power sharing accuracy:
uωi = Kaω(t)(∑
j∈Nci
aijYij(t) +∑
j∈Nci
aijγji(t)), (23)
where Yij = ωi−ωj+Λijσij , γji = mPiPi−mPjPj+Λijσij ,Λij is the noise intensity, σij is independent standard whitenoise, K is the control parameter to be determined, and aω(t)is the consensus gain satisfying∫ ∞
0
aω(t)ds = ∞ and
∫ ∞
0
aω(t)2(s)ds < ∞. (24)
We note that the latter term of (23) guarantees that realpower sharing will be maintained after applying the secondarycontrol even in the event of communication failure. Accordingto (21) and (22), we can write ωni as follows:
ωni =
∫uωi , i = 1, 2, ..., N. (25)
The following theorem summarizes the results of this sec-tion:
Theorem 4.1: The protocol (25) guarantees that the DGoutput frequency, ωni, synchronizes with ωref irrespective ofstochastic noise in communication channels.
Proof: Equations (18)-(25) prove the theorem.In light of the fact that stochastic noise in the commu-
nication channels is unavoidable, the proposed method hasbetter noise cancellation compared with the existing distributedcontrol methods because aω(t) adds a further degree offreedom to the controller. As shown in (23), the protocoluωi comprises two parts. The protocol’s first part leads to thesteady-state track of the nominal frequency (i.e., ωi −→ ωref )despite stochastic noise in the communication channels, andthe second part ensures real power sharing accuracy (i.e.,mpjPj −→ mpiPi). Fig. 3 shows the block diagram of the dis-tributed consensus-based noise-resilient secondary frequencyprotocol.
Remark 4.2: The parameters of the voltage and frequencyprotocols are the set b1 < 0, b2 < 0, a(t) < 0, K < 0,and aω < 0, and the performance of the microgrid system isspecified with the proper selection of these parameters. Weuse simulations to determine the best combination of theseparameters as a(t) =
−100
t+ 1, aω =
−20
t+ 1, and b1 = b2 = K =
-100.

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
6
niw iw
iPa (t)w
[ (t)]ci
ij ijj NK a Y
Îå
[ (t))]ci
ij ijj NK a g
Îå
+
+
+
jP
+
+
+
(t)ij ijsL
(t)ij ijsL
1
s
refw
jw
DG #i
Fig. 3. Block diagram of the distributed noise-resilient secondaryfrequency control.
V. SIMULATION RESULTS
To evaluate the effectiveness of the proposed dis-tributed noise-resilient secondary control method, we simu-late the multi-DG microgrid of [28] (Fig. 4), in the MAT-LAB/Simulink software environment for different scenariosand verify the results by comparing them with the conventionaldistributed control method reported in [25]. The parameters ofthe microgrid system have been obtained from [28]. Althoughthe results have not been experimentally validated, However,the proposed algorithm have been verified by comparingwith the previously-reported techniques. In this regard, thefollowing practical issues have been taken into account:
1) The intrinsic communication link delays have been takeninto account in the simulation scenarios.
2) The controllers for each DG unit are digitally imple-mented (suitable for using in DSP or a micro-controller)in the MATLAB/Simulink software.
3) The detailed switching models are used for inverters.4) A time delay has been imposed on the output of PWM
controllers before being applied to the switches.5) The signal sampling delay has been taken into account
before processing in the inverters control loops. Froma computational perspective, the proposed method doesnot use any particularly problematic operation or heavycomputations. Thus, we believe that the computationalcomplexity is not a significant concern for practicalimplementation in the proposed method.
A. System Performance Evaluation
In this section, we evaluate the performance of the proposedsecondary control scheme using a simulation scenario thatproceeds as follows:
1) t = 0.0 s (simulation initialization period). Only theprimary control is activated, and Load #6 is out of thecircuit.
2) t = 1.5 s. The proposed distributed noise-resilientsecondary control is applied.
3) t = 2 s. Load #1 is increased by the amount of 19.4kW + j 13.3 kVar (100% increment of load).
4) t = 2.5 s. Additive noise with σ2 = 0.1 is added to theprevious noise.
Fig. 4. Topology of the study system (“(c) IEEE from [28]”).
5) t = 3 s. DG #4 is disconnected (plugged out).6) t = 3.5 s. DG #4 is re-connected (plugged in).
The communication links include noise with σ2 = 0.1. Thesimulation results have been shown in Figs. 5 and 6. Theproposed distributed noise-resilient controller can regulate thevoltage and frequency after step load change, which is knownas a small-signal disturbance. After that, when we add theadditive noise with the variance of 0.1 to the previous noise att = 2.5 s, the proposed distributed noise-resilient secondarycontrol scheme performs well and the voltage and frequencywaveforms are stably regulated without any deterioration.Finally, when the DG unit is plugged out at t = 3 s andthen plugged in at t = 3.5 s, the proposed method respondswell to the outage and reconnection of the DG unit, whichis known as a large-signal disturbance. After t = 3 s, becausethe DG #4 has been unplugged, and other DG units are stillin the communication graph, the remaining DGs will exactlyfollow the set points. In addition to providing robust stability,this approach realizes the plug and play (P & P) functionalityof the microgrid.
The control of voltage and accurate reactive power sharingcan only be achieved under a symmetric configuration, dueto the line impedance effect, [19]. Therefore, accurate voltageregulation results in large errors in reactive power sharing.Conversely, the precise reactive power sharing leads to thepoor voltage regulation. Thus, a trade-off should be made be-tween voltage regulation and reactive power sharing accuracy.In this section, we have just focused on the secondary voltagecontrol; however, we have found that the proposed secondarycontroller does not worsen the reactive power sharing amongthe DGs before applying the secondary control.
B. Communication Network Change
The study deals with the change in the communicationnetwork. The topology of the communication graph changesfrom G1 (Fig. 7(a)) to G2 (Fig. 7(b)). Then, we repeat thestudy discussed in Subsection V-A with the same simulation

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
7
1 1.5 2 2.5 3 3.5 442
44
46
48
50
52
54f(Hz)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
2
4
6
8
10
12
mP
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
20
40
60
80
100
120
P(kW
)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 5. System performance evaluation: a) frequencies, b) real powerratios, and c) output real powers of DG units.
scenario. In this case, based on the waveforms of frequency,real power ratio, and output real power signals (Fig. 8) and out-put voltage amplitude of DG units (Fig. 9), We observed thatthe proposed scheme regulates and stabilizes the fluctuationsof the voltage and frequency caused by the primary controllevel after the small-signal (load step change) and large-signal(outage of DG unit) disturbances in the presence of additivenoise.
C. Change of Additive Noise Parameters
In this part of the analysis, to show the robustness and re-siliency of the proposed distributed secondary control schemewith respect to the change of the noise parameters, we changethe variance of the additive noise from σ2 = 0.1 to σ2 = 0.3( thrice). Then, with the same simulation scenario, we repeatthe study of subsection V-A. Again, we observe from Figs. 10and 12 that the microgrid’s voltage and frequency are restoredeffectively in the case of the small and large-signal events inthe presence of additive noise with the higher (tripled) variancevalue.
D. Comparison with a Previously-Reported Method [25]
Finally, we compare the proposed method with thepreviously-reported distributed cooperative secondary controlmethod discussed in [25]. The previous simulation scenario in
1 1.5 2 2.5 3 3.5 4280
300
320
340
360
380
400
420
vo,magi(V)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
Q(kVar)
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
Q(kVar)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 6. System performance evaluation: DGs output (a) voltagemagnitude, (b) reactive power with secondary control, and (c) reactivepower without secondary control.
DG 4#DG 5#
Ref
DG#2
DG 3#
DG 4#DG 5#
DG#1
Ref
1G 2G
)a )b
DG#1
DG#2
DG#3
Fig. 7. Topology of communication graphs: a) old topology, b) newtopology.
subsection V-A is performed using the secondary controllerproposed in [25]. As we will show in Fig. 12 (a)-(b), whenadditive noise (σ2 = 0.1) included, the voltage and frequencywaveforms fluctuate greatly with high-frequency distortionsusing the secondary controller presented in [25]. However, asdiscussed in subsection V-C, the proposed distributed noise re-silient secondary controllers have desirable performance even

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
8
1 1.5 2 2.5 3 3.5 440
45
50
55
60
65
70
75f(Hz)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
2
4
6
8
10
12
mP
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
20
40
60
80
100
120
P(kW
)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 8. Communication network change: a) frequencies, b) real powerratios, and c) output real powers of DG units.
when the noise variance is tripled. To show the effectivenessand authenticity of the proposed control strategy and itssuperiority over the reported techniques, we have comparedthe voltage and frequency response of the proposed noise-resilient distributed control strategy (when the communicationchannels are prone to the additive noise) and the previously-published control strategy of [25], as shown in Figs. 12 (c)-(d).
VI. CONCLUSION
In this paper, we have proposed a novel distributed noise-resilient secondary control to restore voltage and frequency ofan islanded inverter-interfaced microgrid that includes severalDG units. Local controllers receive noisy measurements fromneighboring units on account of the existence of stochasticnoise in communication channels. In the proposed consensusprotocols, we considered not only the noisy measurements,but also the complete nonlinear dynamic large-signal modelof the microgrid system. To regulate the microgrid voltageand frequency and provide proportional accurate real powersharing, we present a mean-square average-consensus model inan uncertain environment. We presented theoretical concepts,including mathematical modeling of microgrid, basic theo-rems, and design procedure of the proposed distributed noise-resilient secondary controller, and evaluated the performance
1 1.5 2 2.5 3 3.5 4280
300
320
340
360
380
400
420
vo,magi(V)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
20
40
60
80
100
Q(kVar)
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
20
40
60
80
100
Q(kVar)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 9. Communication network change: DGs output (a) voltagemagnitude, (b) reactive power with secondary control, and (c) reactivepower without secondary control.
of the controller for small and large-signal disturbances, basedon offline time-domain simulations in the MATLAB/Simulinkenvironment. We verified our findings by comparing them witha previously-reported distributed secondary control method.The results indicate that using the proposed robust controlscheme allows the microgrid to restore the fluctuations of volt-age and frequency and maintain its stability when faced withsmall- and large-signal disturbances. This approach shows ro-bust performance in the face of changes in the communicationnetwork topology and communication uncertainties.
Finally, it should be remarked that although the proposedsecondary controller does not worsen the reactive powersharing among the DGs before applying the secondary control,however, by adding virtual impedance to complete dynamicof primary control level, the problem of proportional ac-tive/reactive power sharing is completely resolved. This issue,along with the generalization of the proposed strategy forhybrid AC/DC and DC microgrids, is the subject of featureresearch of the authors.
REFERENCES
[1] S. Mousavi, A. Jalilian, M. Savaghebi, and J. Guerrero, “Autonomouscontrol of current and voltage controlled dg interface inverters for reac-

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
9
1 1.5 2 2.5 3 3.5 442
44
46
48
50
52
54f(Hz)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
2
4
6
8
10
12
mP
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
20
40
60
80
100
120
P(kW
)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 10. Change of additive noise parameters: a) frequencies, b) realpower ratios, and c) output real powers of DG units.
tive power sharing and harmonics compensation in islanded microgrids,”IEEE Trans. Power Electron., vol. PP, no. 9, pp. 1–10, Jan. 2018.
[2] D. E. Olivares, A. Mehrizi-Sani, A. H. Etemadi, C. A. Caizares,R. Iravani, M. Kazerani, A. H. Hajimiragha, O. Gomis-Bellmunt,M. Saeedifard, R. Palma-Behnke, G. A. Jimnez-Estvez, and N. D.Hatziargyriou, “Trends in microgrid control,” IEEE Trans. Smart Grid,vol. 5, no. 4, pp. 1905–1919, Jul. 2014.
[3] H. R. Baghaee, M. Mirsalim, G. B. Gharehpetian, and H. A. Talebi,“Three-phase AC/DC power-flow for balanced/unbalanced microgridsincluding wind/solar, droop-controlled and electronically-coupled dis-tributed energy resources using radial basis function neural networks,”IET Power Electronics, vol. 10, no. 3, pp. 313–328, Mar. 2017.
[4] A. Etemadi and R. Iravani, “Overcurrent and overload protection ofdirectly voltage-controlled distributed resources in a microgrid,” IEEETrans. Ind. Electron., vol. 60, no. 12, pp. 1254–1262, Jun. 2013.
[5] J. Guerrero, M. Chandorkar, T. Lee, and P. Loh, “Advanced control archi-tectures for intelligent microgrids−Part I: Decentralized and hierarchicalcontrol,” IEEE Trans. Ind. Electron., vol. 60, no. 4, pp. 1254–1262, Apr.2013.
[6] H. Cai and G. Hu, “Distributed robust hierarchical power sharing controlof grid-connected spatially concentrated ac microgrid,” IEEE Trans.Control Syst. Techn., vol. PP, no. 99, pp. 1–11, Jan. 2018.
[7] Z. Jin, L. Meng, J. Guerrero, and R. Han, “Distributed robust hierar-chical power sharing control of grid-connected spatially concentrated acmicrogrid,” IEEE Trans. Smart Grid, vol. PP, no. 99, pp. 1–10, Nov.2017.
[8] A. G. Tsikalakis and N. D. Hatziargyriou, “Centralized control foroptimizing microgrids operation,” IEEE Trans. Energy Convers., vol. 23,no. 1, pp. 241–248, Mar. 2008.
[9] Y. Seyed, H. Karimi, and J. Guerrero, “Centralized disturbance detectionin smart microgrids with noisy and intermittent synchrophasor data,”IEEE Trans. Smart Grid, vol. 8, no. 8, pp. 2775–2783, Nov. 20178.
[10] G. A. Pagani and M. Aiello, “Towards decentralization: A topological
1 1.5 2 2.5 3 3.5 4280
300
320
340
360
380
400
420
vo,magi(V)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
Q(kVar)
(b)
DG #1
DG #2
DG #3
DG #4
DG #5
1 1.5 2 2.5 3 3.5 4
0
10
20
30
40
50
60
Q(kVar)
Time(sec)
(c)
DG #1
DG #2
DG #3
DG #4
DG #5
Fig. 11. Change of additive noise parameters: DGs output (a) voltagemagnitude, (b) reactive power with secondary control, and (c) reactivepower without secondary control.
investigation of the medium and low voltage grids,” IEEE Trans. SmartGrid, vol. 2, no. 3, pp. 538–547, Sept. 2011.
[11] P. Garca-Trivio, J. Torreglosa, L. Fernndez-Ramrez, and F. Jurado,“Decentralized fuzzy logic control of microgrid for electric vehiclecharging station,” IEEE J. of Emerg. and Selec. Topics in PowerElectron., vol. PP, no. 99, pp. 1–10, Jan. 2016.
[12] M. Chen and X. Xiao, “Secondary restoration control of islandedmicrogrids with decentralized event-triggered strategy,” IEEE Trans. Ind.Inform., vol. PP, no. 99, pp. 1–10, Dec. 2017.
[13] J. Lai, X. Luc, W. Yao, J. Wen, and S. Cheng, “Robust distributed coop-erative control for dc mircogrids with time delays, noise disturbances,and switching topologies,” J. of the Franklin Inst., vol. 354, no. 18, pp.8312–8332, Dec. 2017.
[14] Q. Li, C. Peng, M. Wang, M. Chen, J. M. Guerrero, and D. Abbott,“Distributed secondary control and management of islanded microgridsvia dynamic weights,” IEEE Trans. Smart Grid, vol. PP, no. 99, pp.1–10, Jan. 2018.
[15] N. Daz, J. Vasquez, and J. Guerrero, “A communication-less distributedcontrol architecture for islanded microgrids with renewable generationand storage,” IEEE Trans. Power Electron., vol. 33, no. 3, pp. 1922–1939, Mar. 2018.
[16] A. Bidram, A. Davoudi, F. L. Lewis, and Z. Qu, “Secondary controlof microgrids based on distributed cooperative control of multi-agentsystems,” IET Gener Transm Dis., vol. 7, no. 8, pp. 822–831, Aug.2013.
[17] S. Abhinav, I. Schizas, F. Lewis, and A. Davoudi, “Distributed noise-resilient networked synchrony of active distribution systems,” IEEETrans. Smart Grid, vol. PP, no. 99, pp. 1–1, 2017.
[18] F. Guo, C. Wen, J. Mao, and Y. D. Song, “Distributed secondaryvoltage and frequency restoration control of droop-controlled inverter-

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
10
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 349.8
50
50.2
50.4
50.6f(Hz)
(a)
DG #1
DG #2
DG #3
DG #4
DG #5
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3374
376
378
380
382
vo,magi(V)
(b)
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 349.8
50
50.2
50.4
50.6
f(Hz)
(c)
2.1 2.2 2.3 2.4 2.5 2.6 2.7 2.8 2.9 3360
365
370
375
380
385
vo,magi(V)
Time(sec)
(d)
Fig. 12. Comparison with a previously-reported method [25]: a)frequency, b) voltage magnitudes of PCC buses of DG units, using thepreviously-reported distributed cooperative secondary control method[25], c) frequency, and d) voltage magnitudes of PCC buses of DGunits, using the proposed distributed noise-resilient secondary controlscheme.
based microgrids,” IEEE Trans. Ind. Electron., vol. 62, no. 7, pp. 4355–4364, Jul. 2015.
[19] J. W. Simpson-Porco, Q. Shafiee, F. Drfler, J. C. Vasquez, J. M. Guerrero,and F. Bullo, “Secondary frequency and voltage control of islanded mi-crogrids via distributed averaging,” IEEE Trans. Ind. Electron., vol. 62,no. 11, pp. 7025–7038, Nov. 2015.
[20] A. Bidram, F. L. Lewis, and A. Davoudi, “Distributed control systemsfor small-scale power networks: Using multiagent cooperative controltheory,” IEEE Control Syst. Mag., vol. 34, no. 6, pp. 56–77, Dec. 2014.
[21] J. W. Simpson-Porco, F. Drfler, F. Bullo, Q. Shafiee, and J. M. Guerrero,“Stability, power sharing, amp; distributed secondary control in droop-controlled microgrids,” in Proc. IEEE Int. Conf. Smart Grid Commun.,Oct. 2013, pp. 672–677.
[22] N. M. Dehkordi, N. Sadati, and M. Hamzeh, “Fully distributed cooper-ative secondary frequency and voltage control of islanded microgrids,”IEEE Trans. Energy Convers., vol. 32, no. 2, pp. 675–685, Jun. 2017.
[23] X. Lu, R. Lu, S. Chen, and J. Lu, “Finite-time distributed tracking
control for multi-agent systems with a virtual leader,” IEEE Trans.Circuits Syst. I, Reg. Papers, vol. 60, no. 2, pp. 352–362, Feb. 2013.
[24] X. Lu, S. Chen, and J. L, “Brief paper - finite-time tracking for double-integrator multi-agent systems with bounded control input,” IET ControlTheory Appl., vol. 7, no. 11, pp. 1562–1573, Jul. 2013.
[25] A. Bidram, A. Davoudi, F. L. Lewis, and J. M. Guerrero, “Distributedcooperative secondary control of microgrids using feedback lineariza-tion,” IEEE Trans. Power Syst., vol. 28, no. 3, pp. 3462–3470, Aug.2013.
[26] Q. Shafiee, J. M. Guerrero, and J. C. Vasquez, “Distributed secondarycontrol for islanded microgrids A novel approach,” IEEE Trans. PowerElectron., vol. 29, no. 2, pp. 1018–1031, Feb. 2014.
[27] X. Lu, X. Yu, J. Lai, J. M. Guerrero, and H. Zhou, “Distributedsecondary voltage and frequency control for islanded microgrids withuncertain communication links,” IEEE Trans. on Ind. informatics,vol. 13, no. 2, pp. 448–460, Apr. 2017.
[28] J. Lai, H. Zhou, X. Lu, X. Yu, and W. Hu, “Droop-based distributedcooperative control for microgrids with time-varying delays,” IEEETrans. Smart Grid, vol. 7, no. 4, pp. 1775–1789, Jul. 2016.
[29] H. Xin, Z. Qu, J. Seuss, and A. Maknouninejad, “A self-organizing strat-egy for power flow control of photovoltaic generators in a distributionnetwork,” IEEE Trans. Power Syst., vol. 26, no. 3, pp. 1462–1473, Aug.2011.
[30] S. Abhinav, I. D. Schizas, and A. Davoudi, “Noise-resilient synchronyof ac microgrids,” in Proc. 2015 Resilience Week (RWS), Philadelphia,PA, USA, Aug. 2015, pp. 1–6.
[31] C. Ahumada, R. Crdenas, D. Sez, and J. M. Guerrero, “Secondarycontrol strategies for frequency restoration in islanded microgrids withconsideration of communication delays,” IEEE Trans. Smart Grid, vol. 7,no. 3, pp. 1430–1441, May 2016.
[32] X. Lu, N. Chen, Y. Wang, L. Qu, and J. Lai, “Distributed impulsivecontrol for islanded microgrids with variable communication delays,”IET Control Theory Appl., vol. 10, no. 14, pp. 1732–1739, 2016.
[33] J. G. Proakis, Digital Communications. New York, NY, USA: McGraw-Hill, 1995.
[34] M. A. Hanley, Frequency instability problems in north american in-terconnections. New York, NY, USA: National Energy TechnologyLaboratory Report, Tech., May 2011.
[35] J. Hu and G. Feng, “Distributed tracking control of leaderfollower multi-agent systems under noisy measurement,” Automatica, vol. 46, no. 8, pp.1382 – 1387, Aug. 2010.
[36] Y. Hong, G. Chen, and L. Bushnell, “Distributed observers design forleader-following control of multi-agent networks,” Automatica, vol. 44,no. 3, pp. 846 – 850, Mar. 2008.
[37] T. Morstyn, B. Hredzak, and V. G. Agelidis, “Distributed cooperativecontrol of microgrid storage,” IEEE Trans. Power Syst., vol. 30, no. 5,pp. 2780–2789, Sept. 2015.
[38] M. J. Hossain, M. A. Mahmud, F. Milano, S. Bacha, and A. Hably,“Design of robust distributed control for interconnected microgrids,”IEEE Trans. on Smart Grid, vol. 7, no. 6, pp. 2724–2735, Nov. 2016.
[39] A. Bidram, A. Davoudi, and F. L. Lewis, “A multiobjective distributedcontrol framework for islanded AC microgrids,” IEEE Trans. Ind.Informat., vol. 10, no. 3, pp. 1785–1798, Aug. 2014.
[40] L. Xiao, S. Boyd, and S.-J. Kim, “Distributed average consensuswith least-mean-square deviation,” Journal of Parallel and DistributedComputing, vol. 67, no. 1, pp. 33 – 46, 2007.
[41] L. Cheng, Z. G. Hou, and M. Tan, “A mean square consensus protocolfor linear multi-agent systems with communication noises and fixedtopologies,” IEEE Trans. Autom. Control, vol. 59, no. 1, pp. 261–267,Jan. 2014.
[42] H. K. Khalil, Nonlinear Systems, 3rd ed. Upper Saddle River, NJ,USA: Prentice-Hall, 2002.
Nima Mahdian Dehkordi received the M.Sc. andPh.D. degrees from Sharif University of Technology,Tehran, Iran, in 2012 and 2016, respectively, both inelectrical engineering. He joined the the Departmentof Electrical Engineering, Science and ResearchBranch, Islamic Azad University, Tehran, Iran, in2017, where he is currently an Assistant Professor.
His research interests include control systems,applications of control theory in power electron-ics, microgrid control, distributed and cooperativecontrol, internet of things, nonlinear control, and
network control.

1949-3053 (c) 2018 IEEE. Personal use is permitted, but republication/redistribution requires IEEE permission. See http://www.ieee.org/publications_standards/publications/rights/index.html for more information.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/TSG.2018.2834951, IEEETransactions on Smart Grid
11
Hamid Reza Baghaee (SM’ 2008, M’ 2017)received his Ph.D. degree in Electrical En-gineering from Amirkabir University of Tech-nology (AUT) in 2017. Since 2007 to 2017,he has been a teaching and research assis-tant in department of electrical engineering andalso a research assistant at electrical machines& transformers research laboratory (EMTRL) athttp://ele.aut.ac.ir/EMTRL/Homepage.htm. He is au-thor of one published chapter book, 35 journal and50 conference papers and owner of one registered
patents. His special fileds of interest are micro and smart grids, applicationof power electronic in power systems, distributed generation and renewableenergies, power system operation, and control, and application of artificialintelligence in power systems. Dr. Baghaee is the winner of two nationalprizes from ISOSG and IEA for his PhD dissertation. He is also reviewer ofseveral IEEE and IET journals and member of scientific committees of severalIEEE conferences.
Nasser Sadati (M’95) is a Full Professor with theDepartment of Electrical Engineering, Sharif Univer-sity of Technology, Tehran, Iran, where he is also theFounder and Director of the Intelligent Systems Lab-oratory (ISL), and a Founding Member of the Centerof Excellence in Power System Management andControl (CEPSMC). He is the recipient of a numberof awards and honors. He is one of the Foundersand Advisory Board Members of the Iranian Journalof Fuzzy Systems (IJFS), and currently serving onthe editorial boards of a number of journals. He
has published more than 300 technical papers in peer-reviewed journals andconference proceedings. His book published by Wiley-IEEE Press (2012) is onHybrid Control and Motion Planning of Dynamical Legged Locomotion. Hisresearch interests include large-scale control systems, intelligent control andmachine learning, robotics, biped locomotion, application of control theoryin power systems, offshore wind energy, microgrid control, multi-modeling,and robust control. He is the Organizer and Chair of the Special Session onModeling and Control of Offshore Wind Turbines, IEEE SMC 2018. He is aTechnical Committee Member on Distributed Intelligent Systems of the IEEESystems, Man, and Cybernetics Society.
Josep M. Guerrero (S’01-M’04-SM’08-FM’15)received the B.S. degree in telecommunications en-gineering, the M.S. degree in electronics engineer-ing, and the Ph.D. degree in power electronics fromthe Technical University of Catalonia, Barcelona, in1997, 2000 and 2003, respectively. Since 2011, hehas been a Full Professor with the Department ofEnergy Technology, Aalborg University, Denmark,where he is responsible for the Microgrid ResearchProgram (www.microgrids.et.aau.dk). From 2012 heis a guest Professor at the Chinese Academy of
Science and the Nanjing University of Aeronautics and Astronautics; from2014 he is chair Professor in Shandong University; from 2015 he is adistinguished guest Professor in Hunan University; and from 2016 he is avisiting professor fellow at Aston University, UK, and a guest Professor atthe Nanjing University of Posts and Telecommunications.
His research interests is oriented to different microgrid aspects, includingpower electronics, distributed energy-storage systems, hierarchical and coop-erative control, energy management systems, smart metering and the internetof things for AC/DC microgrid clusters and islanded minigrids; recentlyspecially focused on maritime microgrids for electrical ships, vessels, ferriesand seaports. Prof. Guerrero is an Associate Editor for a number of IEEETRANSACTIONS. He received the best paper award of the IEEE Transactionson Energy Conversion for the period 2014-2015, and the best paper prizeof IEEE-PES in 2015. As well, he received the best paper award of theJournal of Power Electronics in 2016. In 2014, 2015, 2016, and 2017 hewas awarded by Thomson Reuters as Highly Cited Researcher, and in 2015he was elevated as IEEE Fellow for his contributions on “distributed powersystems and microgrids.”