
A Volumetric Contact Dynamics Model
53
Introduction Volumetric Model Experiments Modelling A Volumetric Contact Dynamics Model Mike Boos SYDE 652 March 27, 2012 Mike Boos A Volumetric Contact Dynamics Model 1/ 34
Transcript of A Volumetric Contact Dynamics Model

IntroductionVolumetric Model
ExperimentsModelling
A Volumetric Contact Dynamics Model
Mike Boos
SYDE 652
March 27, 2012
Mike Boos A Volumetric Contact Dynamics Model 1/ 34

IntroductionVolumetric Model
ExperimentsModelling
Outline
1 Introduction
2 Volumetric ModelVolumetric model frameworkNormal forcesFriction forces
3 ExperimentsNormal force experimentsFriction experiments
4 ModellingGraph theoretic contact modelMapleSim modelDemos
Mike Boos A Volumetric Contact Dynamics Model 2/ 34

IntroductionVolumetric Model
ExperimentsModelling
Outline
1 Introduction
2 Volumetric ModelVolumetric model frameworkNormal forcesFriction forces
3 ExperimentsNormal force experimentsFriction experiments
4 ModellingGraph theoretic contact modelMapleSim modelDemos
Mike Boos A Volumetric Contact Dynamics Model 3/ 34

IntroductionVolumetric Model
ExperimentsModelling
Motivation
Dextre at the tip of Canadarm2 (Gonthier, 2007)
Mike Boos A Volumetric Contact Dynamics Model 4/ 34

IntroductionVolumetric Model
ExperimentsModelling
Point contact models
B1
B2
fn
kδ
Figure: Point contact model.
Hertz theory
fn = kδp n(p = 3/2 forsphere-on-sphere)
Hunt-Crossley
fn = kδp(1 + aδ)n
Mike Boos A Volumetric Contact Dynamics Model 5/ 34

IntroductionVolumetric Model
ExperimentsModelling
Point contact models
B1
B2
fn
kδ
Figure: Point contact model.
Hertz theory
fn = kδp n(p = 3/2 forsphere-on-sphere)
Hunt-Crossley
fn = kδp(1 + aδ)n
Mike Boos A Volumetric Contact Dynamics Model 5/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Outline
1 Introduction
2 Volumetric ModelVolumetric model frameworkNormal forcesFriction forces
3 ExperimentsNormal force experimentsFriction experiments
4 ModellingGraph theoretic contact modelMapleSim modelDemos
Mike Boos A Volumetric Contact Dynamics Model 6/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
fn
kv
Figure: Modified Winkler elastic foundation model.
Force element
dfn = kvδ(s)n
Mike Boos A Volumetric Contact Dynamics Model 7/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
n
S
δ(s)
s
Contact plate
B1
B2
n
S
pc
sc
ρs ρv
sp
V =∫S δ(s)dS
pc =∫V pdV
V
Js =∫S((ρs ·ρs)I−ρsρs)δ(s)dS
Jv =∫V ((ρv · ρv)I− ρvρv)dV
J{s,v}n = r2gyrV n
Mike Boos A Volumetric Contact Dynamics Model 8/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
n
S
δ(s)
s
Contact plate
B1
B2
n
S
pc
sc
ρs ρv
sp
V =∫S δ(s)dS
pc =∫V pdV
V
Js =∫S((ρs ·ρs)I−ρsρs)δ(s)dS
Jv =∫V ((ρv · ρv)I− ρvρv)dV
J{s,v}n = r2gyrV n
Mike Boos A Volumetric Contact Dynamics Model 8/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
n
S
δ(s)
s
Contact plate
B1
B2
n
S
pc
sc
ρs ρv
sp
V =∫S δ(s)dS
pc =∫V pdV
V
Js =∫S((ρs ·ρs)I−ρsρs)δ(s)dS
Jv =∫V ((ρv · ρv)I− ρvρv)dV
J{s,v}n = r2gyrV n
Mike Boos A Volumetric Contact Dynamics Model 8/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
n
S
δ(s)
s
Contact plate
B1
B2
n
S
pc
sc
ρs ρv
sp
V =∫S δ(s)dS
pc =∫V pdV
V
Js =∫S((ρs ·ρs)I−ρsρs)δ(s)dS
Jv =∫V ((ρv · ρv)I− ρvρv)dV
J{s,v}n = r2gyrV n
Mike Boos A Volumetric Contact Dynamics Model 8/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Volumetric model
B1
B2
n
S
δ(s)
s
Contact plate
B1
B2
n
S
pc
sc
ρs ρv
sp
V =∫S δ(s)dS
pc =∫V pdV
V
Js =∫S((ρs ·ρs)I−ρsρs)δ(s)dS
Jv =∫V ((ρv · ρv)I− ρvρv)dV
J{s,v}n = r2gyrV n
Mike Boos A Volumetric Contact Dynamics Model 8/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Normal Forces
B1
B2
τ s
τ r
fn
f t
dfn = kvδ(s)(1 + a vn)n
Normal force
fn = kvV (1 + a vcn)n
Rolling resistance torque
τ r = kv aJs · ωt
Mike Boos A Volumetric Contact Dynamics Model 9/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Normal Forces
B1
B2
τ s
τ r
fn
f t
dfn = kvδ(s)(1 + a vn)n
Normal force
fn = kvV (1 + a vcn)n
Rolling resistance torque
τ r = kv aJs · ωt
Mike Boos A Volumetric Contact Dynamics Model 9/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Normal Forces
B1
B2
τ s
τ r
fn
f t
dfn = kvδ(s)(1 + a vn)n
Normal force
fn = kvV (1 + a vcn)n
Rolling resistance torque
τ r = kv aJs · ωt
Mike Boos A Volumetric Contact Dynamics Model 9/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Basic friction model
B1
B2
τ s
τ r
fn
f t
df t = −µdfnvt
Friction force
f t = −µ fnvsct
Spinning friction torque
τ s = −µ r2gyrfn ωn
Mike Boos A Volumetric Contact Dynamics Model 10/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Basic friction model
B1
B2
τ s
τ r
fn
f t
df t = −µdfnvt
Friction force
f t = −µ fnvsct
Spinning friction torque
τ s = −µ r2gyrfn ωn
Mike Boos A Volumetric Contact Dynamics Model 10/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Basic friction model
B1
B2
τ s
τ r
fn
f t
df t = −µdfnvt
Friction force
f t = −µ fnvsct
Spinning friction torque
τ s = −µ r2gyrfn ωn
Mike Boos A Volumetric Contact Dynamics Model 10/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Stick-slip state
Average surface velocity
v2avg = vsct · vsct + (rgyr|ωn|)2
Stick-slip state
s = e−
v2avgv2s
Maximum friction coefficient
µmax = µC + (µS − µC) sCan add lag to s for dwell time dependency.
Mike Boos A Volumetric Contact Dynamics Model 11/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Stick-slip state
Average surface velocity
v2avg = vsct · vsct + (rgyr|ωn|)2
Stick-slip state
s = e−
v2avgv2s
Maximum friction coefficient
µmax = µC + (µS − µC) sCan add lag to s for dwell time dependency.
Mike Boos A Volumetric Contact Dynamics Model 11/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Stick-slip state
Average surface velocity
v2avg = vsct · vsct + (rgyr|ωn|)2
Stick-slip state
s = e−
v2avgv2s
Maximum friction coefficient
µmax = µC + (µS − µC) s
Can add lag to s for dwell time dependency.
Mike Boos A Volumetric Contact Dynamics Model 11/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Stick-slip state
Average surface velocity
v2avg = vsct · vsct + (rgyr|ωn|)2
Stick-slip state
s = e−
v2avgv2s
Maximum friction coefficient
µmax = µC + (µS − µC) sCan add lag to s for dwell time dependency.
Mike Boos A Volumetric Contact Dynamics Model 11/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
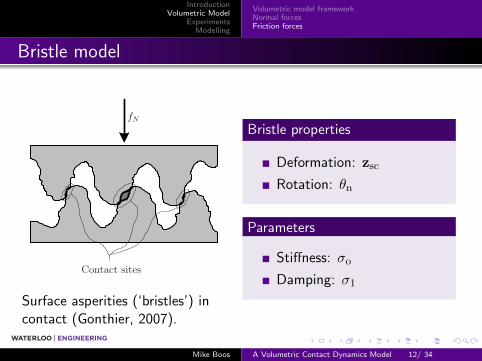
Bristle model
fN
Contact sites
Surface asperities (‘bristles’) incontact (Gonthier, 2007).
Bristle properties
Deformation: zsc
Rotation: θn
Parameters
Stiffness: σo
Damping: σ1
Mike Boos A Volumetric Contact Dynamics Model 12/ 34
IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Bristle model
fN
Contact sites
Surface asperities (‘bristles’) incontact (Gonthier, 2007).
Bristle properties
Deformation: zsc
Rotation: θn
Parameters
Stiffness: σo
Damping: σ1
Mike Boos A Volumetric Contact Dynamics Model 12/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Tangential friction forces
Friction force
f t = −fn (sat(σo zsc + σ1 zsc, µmax) + σ2 vsct)
Bristle deformation rate
zsc = svsct + (1− s)(1σ1 µC dirε(vsct, vε)− σo
σ1 zsc
)
Mike Boos A Volumetric Contact Dynamics Model 13/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Tangential friction forces
Friction force
f t = −fn (sat(σo zsc + σ1 zsc, µmax) + σ2 vsct)
Bristle deformation rate
zsc = svsct + (1− s)(1σ1 µC dirε(vsct, vε)− σo
σ1 zsc
)
Mike Boos A Volumetric Contact Dynamics Model 13/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Spinning friction torque
Spinning friction torque
τ s = −r2gyr fn(sat(σo θn + σ1 θn,
µmaxrgyr
)+ σ2 ωn
)n
Bristle deformation rate
θn = s ωn + (1− s)(
µCσ1 rgyr sgn(ωn)− σo
σ1 θn
)
Mike Boos A Volumetric Contact Dynamics Model 14/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
Spinning friction torque
Spinning friction torque
τ s = −r2gyr fn(sat(σo θn + σ1 θn,
µmaxrgyr
)+ σ2 ωn
)n
Bristle deformation rate
θn = s ωn + (1− s)(
µCσ1 rgyr sgn(ωn)− σo
σ1 θn
)
Mike Boos A Volumetric Contact Dynamics Model 14/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
The Contensou effect
Translational friction forcestend to ‘cancel out’ as angularvelocity increases.
Contensou factors
Cv =|vsct|vavg
Cω =rgyr|ωn|vavg
We now need to update theslipping coefficient in ourbristle dyanmics equations toinclude these factors.
C
A Bv
ωvA
vB
vC
vDD
ω r
ω r
ω r
ω r
v << ωr (Gonthier, 2007)
Mike Boos A Volumetric Contact Dynamics Model 15/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
The Contensou effect
Translational friction forcestend to ‘cancel out’ as angularvelocity increases.
Contensou factors
Cv =|vsct|vavg
Cω =rgyr|ωn|vavg
We now need to update theslipping coefficient in ourbristle dyanmics equations toinclude these factors.
C
A Bv
ωvA
vB
vC
vDD
ω r
ω r
ω r
ω r
v << ωr (Gonthier, 2007)
Mike Boos A Volumetric Contact Dynamics Model 15/ 34

IntroductionVolumetric Model
ExperimentsModelling
Volumetric model frameworkNormal forcesFriction forces
The Contensou effect
Translational friction forcestend to ‘cancel out’ as angularvelocity increases.
Contensou factors
Cv =|vsct|vavg
Cω =rgyr|ωn|vavg
We now need to update theslipping coefficient in ourbristle dyanmics equations toinclude these factors.
C
A Bv
ωvA
vB
vC
vDD
ω r
ω r
ω r
ω r
v << ωr (Gonthier, 2007)
Mike Boos A Volumetric Contact Dynamics Model 15/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Outline
1 Introduction
2 Volumetric ModelVolumetric model frameworkNormal forcesFriction forces
3 ExperimentsNormal force experimentsFriction experiments
4 ModellingGraph theoretic contact modelMapleSim modelDemos
Mike Boos A Volumetric Contact Dynamics Model 16/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Contact properties
Focus on simple geometric pairs:
Cylinder-on-plane
Sphere-on-plane
Payload material: Stainless steelContact plane materials: Al, Mg
Mike Boos A Volumetric Contact Dynamics Model 17/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Apparatus in normal configuration
Force sensorPayload/specimen (stainless steel)
Encoder reference Contact surface (Al or Mg)
Linear
encoder
Mike Boos A Volumetric Contact Dynamics Model 18/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Selected results: Normal forces
Quasi-static loading of SScylinder on Mg plane
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−5
0
5
10
15
20
25
Displacement (µm)
Conta
ct fo
rce (
N)
Measured data
Perpendicular fit
Perpendicular contact point
Misaligned fit
Misaligned contact point
kv = 5.17× 1012N/m3
Damping factors (a) measured
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
1
2
3
4
5
6
7
8
9
10x 10
4
Impact velocity (mm/s)D
am
pin
g facto
r (s
/m)
Estimated factors for AlFit of a ∝ 1/v
i for Al
Estimated factors for MgFit of a ∝ 1/v
i for Mg
a ≈ 1−e2eff
eeff vin
Mike Boos A Volumetric Contact Dynamics Model 19/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Experimental procedure
Identify parameters
Verify parameters Contensou effect
Mike Boos A Volumetric Contact Dynamics Model 20/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Experimental procedure
Identify parameters Verify parameters
Contensou effect
Mike Boos A Volumetric Contact Dynamics Model 20/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Experimental procedure
Identify parameters Verify parameters Contensou effect
Mike Boos A Volumetric Contact Dynamics Model 20/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Friction apparatus
Cylindrical
payload
Rotational
motor
Linear
motor
Encoder
reference
Linear
encoder
3DOF force sensors
Contact
surface
z
y
x
z
y
x
Mike Boos A Volumetric Contact Dynamics Model 21/ 34

IntroductionVolumetric Model
ExperimentsModelling
Normal force experimentsFriction experiments
Selected results: Contensou effect
0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Time (s)
Co
eff
icie
nt
of
Frictio
n
Measured coefficients
Model coefficients
0 1 2 3 4 50
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Time (s)C
oe
ffic
ien
t o
f F
rictio
n
Measured coefficients
Model coefficients
Mike Boos A Volumetric Contact Dynamics Model 22/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Outline
1 Introduction
2 Volumetric ModelVolumetric model frameworkNormal forcesFriction forces
3 ExperimentsNormal force experimentsFriction experiments
4 ModellingGraph theoretic contact modelMapleSim modelDemos
Mike Boos A Volumetric Contact Dynamics Model 23/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Model
c1
c2
f
m1
m2
d
g
Bodies: m1, m2
Measured displacement: d
Volume centroid (relative toeach body): c1, c2
Contact forces: f
Mike Boos A Volumetric Contact Dynamics Model 24/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
MapleSim Model: Assumptions
One deformable body model - body ‘a’ rigid, ‘b’ deformable
Normal axis is frame ‘a’ z-axis (body a is flat)
All vectors and tensors (i.e. inertia tensor, centroid, relativevelocity) calculated for frame ‘a’
Js ≈ JV - volume inertia tensor is easier to calculate thansurface inertia
Volume centroid and surface centroid are very close (normaland friction forces at same location)
Mike Boos A Volumetric Contact Dynamics Model 25/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Model
c1
c2
f
m1
m2
d
g
Mike Boos A Volumetric Contact Dynamics Model 26/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Parameters
Mike Boos A Volumetric Contact Dynamics Model 27/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Forces Block
Mike Boos A Volumetric Contact Dynamics Model 28/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Geometry Calculation Block
Mike Boos A Volumetric Contact Dynamics Model 29/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Geometry: Sphere-on-plane
Mike Boos A Volumetric Contact Dynamics Model 30/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Geometry: Cylinder-on-plane
Mike Boos A Volumetric Contact Dynamics Model 31/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Demo: ‘wobbly’ clutch
Mike Boos A Volumetric Contact Dynamics Model 32/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Demo: tippe top
Mike Boos A Volumetric Contact Dynamics Model 33/ 34

IntroductionVolumetric Model
ExperimentsModelling
Graph theoretic contact modelMapleSim modelDemos
Questions
Mike Boos A Volumetric Contact Dynamics Model 34/ 34


















