System design of the temperature measurement and control ...



A temperature control system
for the Alfvén Laboratory Balloon ExpeRimenT
MAGNUS SÖDERQUIST
Master’s Thesis at Space and Plasma Physics, School of Electrical Engineering, KTH,
Stockholm, Sweden
Supervisor: Nickolay Ivchenko
Examiner: Lars Blomberg
XR-EE-SPP 2010:005


Abstract
The polarized Gamma-ray Observer (PoGOLite) is a balloon-borne ex-periment that will measure the polarization of soft gamma rays in theenergy range 25 keV-80 keV. PoGOLite will carry an auroral diagnosticspackage, ALBERT, to measure the auroral emissions that will enhancethe background level. The the spectrophotometers of the Alfven Labora-tory Balloon ExpeRimenT consists of a photo multiplying tube (PMT),lenses and a Fabry-Perot etalon, to measure auroral emissions as well assurrounding background emissions. The etalon requires a temperaturestabilized environment. In this thesis a thermal analysis of ALBERThas been performed and a control system has been designed. ALBERThas a power budget of 28 W and to meet the thermal requirements thepressure vessel will be insulated with 15 mm of Aerogel Spaceloft onthe inside and 5 mm on the outside. A Peltier element is used to heator cool the vessel. At times when heating with a Peltier element isnot efficient, due to too high temperature difference, a 12 W air heaterwill be used in instead. The air heater and the Peltier element will besupported by a 12 W bench heater, which by heating the optical setupensures a correct temperature of the Fabry-Perot etalons. The controlsystem will consist of one PID for the air heater and one for the Peltierelement. The bench heater will be controlled by a PD regulator withfeed forward. The PMT has a built in Peltier element and this will becontrolled by a PID regulator with feed forward.

Contents
1 Introduction 1
1.1 The Gondola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 ALBERT- Alfvén Laboratory Balloon ExpeRimenT . . . . . . . . . 1
1.3 The layout of ALBERT . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.4 Aim of thesis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Theory 5
2.1 Heat transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Conduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 Convection . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.1.3 Dimensionless numbers . . . . . . . . . . . . . . . . . . . . . 6
2.1.4 Radiation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.5 Thermoelectrics . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Fans and pressure loss . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.1 Friction losses . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2.2 Dynamic losses . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.3 Fans and system curves . . . . . . . . . . . . . . . . . . . . . 10
2.3 Control theory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3.1 Open loop control . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3.2 Closed loop control . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.3 Feed forward control . . . . . . . . . . . . . . . . . . . . . . . 12
3 Preliminary design and calculations 13
3.1 Orientation and direction . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2 Thermal environment . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.1 Ascent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
3.2.2 Observation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2.3 Internal heat generation . . . . . . . . . . . . . . . . . . . . . 15
3.3 Radiative heat balance . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3.1 Thermal environment on the gondola . . . . . . . . . . . . . . 17
3.4 Air circulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.4.1 Air circulation loop . . . . . . . . . . . . . . . . . . . . . . . 17
3.4.2 Heat sink . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20

3.4.3 Fan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.5 Thermal model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.6 Testing of Peltier element . . . . . . . . . . . . . . . . . . . . . . . . 24
4 Final design and calculations 33
4.1 Air circulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.2 Insulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.3 Heating and cooling . . . . . . . . . . . . . . . . . . . . . . . . . . . 334.4 Test of selected Peltier element . . . . . . . . . . . . . . . . . . . . . 344.5 Thermal model . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.5.1 Radiative model . . . . . . . . . . . . . . . . . . . . . . . . . 364.5.2 Conductive model . . . . . . . . . . . . . . . . . . . . . . . . 37
4.6 Control system . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.6.1 Temperature control system for the PMT . . . . . . . . . . . 384.6.2 Temperature control system for ALBERT . . . . . . . . . . . 384.6.3 Results from Simulink simulations . . . . . . . . . . . . . . . 39
5 Summary and Conclusions 47
A Pressure test 49
B Solar data 53
C Material properties 55
D Surface properties 57
E Thermal resistance 59
Bibliography 61


Chapter 1
Introduction
The polarized Gamma-ray Observer (PoGOLite) is a collaboration between Swe-den, Japan, USA, and France. The balloon-borne experiment will measure thepolarization of soft gamma rays in the energy range 25 keV-80 keV, which are ex-pected from a variety of sources including rotation-powered pulsars, accreting blackholes and neutrons stars, and jet-dominated active galaxies [1]. The aim is observethe northern sky sources including Crab Nebula and Cygnus X-1. Measurement ofsoft gamma rays polarization at these energy levels, where non-thermal processesare likely to produce high levels of polarization, have never been performed before.Auroral emissions will enhance the background level and to characterize the back-ground level an auroral diagnostics package will be used [2]. The measurement willtake place at an altitude of 40 km and the balloon will fly for 24 h after its launchfrom Esrange, northern Sweden in August 2011.
1.1 The Gondola
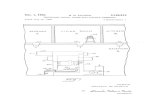
The gondola will be attached to the balloon and the polarimeter telescope pressurevessel is mounted in the middle of the structural frame, see figure 1.1. At the topis a flywheel and an azimuth rotator and on the bottom of the frame is the altitudecontrol, electronics, and power supply. The ballast hangs underneath. ALBERTwill be mounted on the left side. The dimensions of the base is 3 x 3 m and theheight is 4 m.
1.2 ALBERT- Alfvén Laboratory Balloon ExpeRimenT
ALBERT is an auroral diagnostics package that will support the PoGoLite ex-periment. It consists of two spectrometers and a fluxgate magnetometer. Eachspectrometer consists of a PMT (photomultiplying tube) and lenses. It uses aFabry-Perot etalon to measure auroral emissions as well as the emissions from thebackground. This is done by tilting the etalons to scan in wavelength. The etalons
1

CHAPTER 1. INTRODUCTION
ALBERT
Figure 1.1. A sketch of the gondola
pass-frequency is temperature dependent and to get reliable measurements it istherefore crucial to keep a stable temperature.
1.3 The layout of ALBERT
The auroral diagnostics package, except the magnetometer, will be contained in apressure vessel. The pressure vessel is maintained at a pressure of 1 atm during theflight due to the risk of spark-over in the PMT. The air inside is used as temperaturecontrolling media. The pressure vessel consists of a pipe, a lid and a bottom [4].The lid and the bottom are mounted on the pipe with screws and are sealed witho-rings. The lid has two windows; one for each optical setup. The windows aresealed by an o-ring mounted and clamped between the lid and a flange. A baffleis screwed to the flange to minimize unwanted light. The pressure vessel is shownin figure 1.3. The auroral diagnostics package consists of two optical setups, seefigure 1.2. The light passes through the window of the lid and the band-pass filter.The etalon filter then selects the wavelength of interest and the lens focuses it afterwhich the lens in the aperture makes the beams parallel when it enters the PMT.
2

1.3. THE LAYOUT OF ALBERT
Figure 1.2. The optical equipment for auroral diagnostics
Figure 1.3. The pressure vessel containing the optical equipment
3

CHAPTER 1. INTRODUCTION
1.4 Aim of thesis
The aim of this thesis is to design and analyze a temperature control system forALBERT. Such a system is needed for most technical applications working withinnarrow temperature bounds and ALBERT is no exception. Since the accuracy ofthe measurement performed by ALBERT are highly dependent on the temperaturestability it is crucial that the temperature control system is working properly. Theaims were broken down into the following partial goals
- Analysis of the global thermal environment of ALBERT
- Development of numerical/analytical model
- Assements how design parameters affect temperature stability and heating/coolingload
- Assessment of the heating/cooling device behavior
- Modeling and selection of fans for the PMT and the heating/cooling device
- Selection of final design of temperature control system
- Mechanical design of thermal control system
- Pressure testing of the pressure vessel
4

Chapter 2
Theory
This chapter will cover the basic theory behind the calculations made in this the-sis. The chapter is divided in to three parts covering heat transfer, pressure losscalculations, and control theory.
2.1 Heat transfer
The section will cover basic heat transfer by conduction, convection, and radiation.
2.1.1 Conduction
In all liquids and solids where a temperature gradient exists conduction will takeplace. The general equation for conduction in three dimensions is the Fourier’s law,which applies for the Cartesian system.
∂
∂x
(
kxρcp
∂T
∂x
)
+∂
∂y
(
kyρcp
∂T
∂y
)
+∂
∂z
(
kzρcp
∂T
∂z
)
+ q̇ =∂T
∂τ(2.1)
whereki is the thermal conductivity in each direction [W/m K],ρ the density [kg/m3],cp the specific heat of the material [kJ/kg K],T the temperature [K],q̇ the internal heat generation [W/m3]and τ the time [s].For steady-state and isotropic materials (2.1) can be reduced to
k
(
∂2T
∂2x+∂2T
∂2y+∂2T
∂2z+q̇
ρ · c
)
= 0 (2.2)
In many cases the problems can be simplified to one dimension and the parameterof interest is the heat flow Q, in which case the Fourier’s law then becomes
Q = −kA∂T
∂x(2.3)
5

CHAPTER 2. THEORY
whereA is the area where the heat transfer takes place [m2].Where the temperature distribution through the body is not of interest (2.3) canbe reduced to
Q = −kAT1 − T2
∆x(2.4)
2.1.2 Convection
Convection is a phenomenon that occurs in moving liquids and gases. The cause ofthe motion or flow could be either difference in density due to temperature gradients(natural convection) or a forced motion by a fan or a pump (forced convection). Forthe overall effect of convection, the Newton’s law of cooling is used
Q = hA∆T (2.5)
whereh is the heat transfer coefficient [W/m2 K].To use this equation the fluid regime must first be characterized, turbulent or lami-nar, and then determine the heat transfer coefficient. This is done by using dimen-sionless numbers.
2.1.3 Dimensionless numbers
Dimensionless numbers are a powerful tool to make heat transfer correlations simpleand general. There are plenty of dimensionless numbers and some that are used inthis study are presented below.
Reynolds number
The Reynolds number Re is one of the most used dimensionless numbers and itprovides information about the boundary layer. For flow between parallel platesthe flow regime is fully laminar for Re below 2500 and fully turbulent for Re above7000. In between is the transition regime which is usually categorized as turbulent[7].
Re =wL
ν(2.6)
wherew is the flow speed [m/s],L the characteristic length [m],and ν the kinematic viscosity [m2/s].
Prandtl number
The Prandtl number Pr is the connecting link between the velocity field and thetemperature field. It relates the relative thickness of the hydrodynamic and thermal
6

2.1. HEAT TRANSFER
boundary layers [9]. Since the Prandtl number for a fluid only depends on temper-ature (cp and k is temperature dependent) the value is tabulated in the literature[6] or can be calculated by
Pr =cp · µ
k(2.7)
whereµ the dynamic viscosity [Ns/m2].
Gratz number
The Gratz number gives information about whether the laminar flow is fully devel-oped, meaning that the velocity profile is in a steady-state. The number is used forcalculations in channels and ducts.
Gz = Re · PrL
de(2.8)
whereL is the characteristic length [m],and de the hydraulic diameter [m].
Nusselt number
The number is a way to describe the temperature profile in the boundary layer closeto the surface and is based on similarities of the temperature fields and velocity fields[6]. It is used to find the heat transfer coefficient h and is defined as
Nu =h · d
k(2.9)
Approximations of the Nusselt number can be found in the literature for specificcases and the characteristic length is dependent on geometry [6]. An example of anapproximation that is valid for laminar flow in short circular tubes is
Nu = 1.62
(
RePr d
L
)
(2.10)
2.1.4 Radiation
Radiation properties
The incident radiation on a surface can either be absorbed α, reflected ρ, transmittedτ , or a combination of these three. Each of these is between zero and one and thesum must be unity.
ρ+ α+ τ = 1 (2.11)
Most solid bodies do not transmit thermal radiation so in most applied problemsthe transmission many be taken as zero.
7

CHAPTER 2. THEORY
Black body
Black bodies are idealized bodies that absorb all radiation incident upon them. Theabsorption of all light is the reason for the name, black body, it appears black tothe eye. Energy emitted from a black body, Eb, at a temperature T is given by theStefan-Boltzmann law
Eb = σT 4 (2.12)
whereσ is Stefan-Boltzmann’s constant, 5.669 ·10−8 [W/m2 K4].
Gray body
The definition of a gray body is that the monochromatic emissivity is independentof the wavelength. The monochormatic emissivity is defined as the ratio betweenthe emitted power of the body for each wavelength to the emitted power of a blackbody at the same wavelength and temperature by
ελ =EλEbλ
(2.13)
whereEλ is the energy emitted by a gray body at a certain wavelength [W],Ebλ the energy emitted by a blackbody at a certain wavelength [W],and ελ is the emissivity at a certain wavelength . Thus the gray body definitionresult in
ε = ελ (2.14)
whereε is the emissivity for all wavelengths.
Real body
For the real body the monochromatic emissivity is dependent on not only the wave-length but also the temperature. The gray body assumption is usually made whenmaking analysis even though this means that the emissivity may differ considerablyfrom the idealized cases with the black and the gray body. In most real cases,where the radiant environment is not 0 K, the surrounding is radiating to the body,equation (2.12) becomes
Q = Aσ(
ε T 41 − αT
42
)
(2.15)
whereT1 is the temperature of the body [K]and T2 is the temperature of the surrounding [K].
8

2.2. FANS AND PRESSURE LOSS
View factors
The definition of the view factor is the fraction of energy leaving one surface whichreaches another surface. View factors are used when calculating the radiative ex-change between two bodies and is a result of the geometry, distance, and anglesbetween the bodies. For simple cases the view factors are listed but in most realcases the geometries are complex and the calculations become quite complicated.When introducing the view factor the net heat exchange becomes
Q = F12Aσ(
ε T 41 − αT
42
)
(2.16)
whereF12 is the view factor from body 1 to body 2.
2.1.5 Thermoelectrics
A thermoelectric element consists of a closed loop with as junction between dissim-ilar conductors. If one junction is heated a current flow through the loop. Thisis called the Seebeck effect. If a current is led through the junction a temperaturegradient arises between the two conductors. The effect is called the Peltier effect [5].Themoeclectrics are used in a variety of commercial products, e.g., refrigeration, labequipment, and cooling of optics.
2.2 Fans and pressure loss
In all systems where there is an air motion there will be variations in pressure.Most of these pressure variations can be characterized as losses. The losses can bedivided into two parts; friction losses and dynamic losses. The total loss coefficientζtot is the sum of these
ζtot = ζf + ζd (2.17)
whereζf is the friction loss coefficientand ζd is the dynamic loss coefficient.The total pressure loss ∆ptot is calculated from
∆ptot = ζtot ρw2
2(2.18)
whereρ is the fluid density [kg/m3]and w is the fluid velocity [m/s].
2.2.1 Friction losses
Large friction losses appear in long and narrow flow channels, which usually is thecase for heat sinks. The friction loss coefficient increases with increasing length L
9

CHAPTER 2. THEORY
and decreasing hydraulic diameter de.
ζf = f ·L
de(2.19)
The friction factor f is dependent on whether the flow is turbulent or laminar.For the fully developed laminar case the friction factor is only dependent on thegeometry and not the roughness of the walls. The friction factor is then defined as
f =C
Re(2.20)
wherethe constant value C is 53.3 for a triangular duct, 64 for a circular pipe, 56.9 forsquare duct and 96 for flow between parallel plates [6] .
For most real applications, where the flow channel is relatively short, fully devel-oped laminar flow is unusual. Since the turbulent flow is dependent on the surfaceroughness the friction factor has to be determined from case to case. On relationthat is approximately valid for fully developed turbulent flow in smooth circularchannels is
f =0.316
Re0.25(2.21)
Another way to calculation the friction factor is to use the Reynolds analogy whichis valid for both laminar and turbulent flow. The analogy expresses the relationbetween heat transfer and friction loss [7].
f =8 · St
Λapp(2.22)
whereΛapp is the analogy number,and St is the Stanton number which is defined as St = Num
RePr
Λapp is used to indicate that the equation also is valid for developing flow. Theanalogy number for fully developed flow between parallel plates is 0.9 and there area number of relations for other geometries and developing flow.
2.2.2 Dynamic losses
Losses that occur when the flow is changing direction are called dynamic losses. Ifthe change is sudden, vortices will form and cause larger losses. Estimates of thedynamic loss coefficient ζ are listed for different flow change cases [7].
2.2.3 Fans and system curves
The volume flow rate at which the air leaves a fan is dependent on the pressureincrease it has to overcome. Hence the maximum flow rate will be at zero pressure
10

2.3. CONTROL THEORY
rise and maximum pressure increase when the flow rate is zero. The correlationbetween flow rate and pressure increase depend on the fan type. The three maintype of fans that can be distinguished are axial, radial, and cross blow. Axial fansare the most common type in cooling of electronics. Radial and cross blow typesare used in larger systems, e.g., ventilation.
System curves, i.e., the pressure drop in the system as a function of the flowrate, works the other way around. The pressure drop increases with increasing flowrate and can in a simplified manner be described by
∆p = C · V̇ n (2.23)
whereC is a constant,V̇ is the volume flow [m3/s]and the exponent, n, is theoretically one for pure laminar flow and close to two forpure turbulent flow. By combining the system curve with a fan curve one can gainthe operating point which is the intersection point between these two. If the fangives the desired volume flow at the operating point the fan selection is done otherwise this iterative process has to continue until the flow requirements are fulfilled.
2.3 Control theory
A quick introduction to the basics of control theory is presented below, coveringopen, close loop, and feed forward controllers. When designing a controller for asystem, a simplified model of the system is used. For a dynamic system i.e. a systemwith an inertia, the output y of the system is not only a function of the currentinput u but also a function of previous inputs
h (t) = H (u (τ) , τ < T ) (2.24)
Calculations are made in the frequency domain by using the Laplace transformwhich, for a function h (t), is defined as
H (s) =
∫ ∞
0e−sth(t)dt (2.25)
wheres = σ + iω, σ and ω real numbers.
2.3.1 Open loop control
A typical open loop controller regulates a system without knowing the output ofthe system. This means that the controller can not compensate for disturbance,e.g., internal heat gain, or error in the model.
11

CHAPTER 2. THEORY
2.3.2 Closed loop control
A closed loop controller regulates a system based on the error e between the outputy of the system and the a desired output of the system r, i.e., the reference signal.The system’s transfer function is denoted G(s) and for a closed loop system with aregulator denoted F(s) the relation between the reference signal R(s) and the outputY(s) becomes
Y (s) =F (s) G (s)
1 + F (s)G (s)R (s) (2.26)
There are three common types of regulators. The simplest regulator regulatesthe system with a input signal that is proportional to the error. This regulator isdenoted as the P-regulator and is described by
F (s) = Kp (2.27)
Another way is to integrate the error
F (s) =Kis
(2.28)
The third way is to regulate on the derivative of the error according to
F (s) = Kd s (2.29)
This is an ideal regulator. In reality it is used with a low-pass filter to get theregulator itself stable and then becomes
F (s) =Kd s
1 +N s(2.30)
whereN is the filter coefficient.
Combinations of these are usually used. The most common ones are PI, PD andPID.
2.3.3 Feed forward control
A feed forward controller is a combination of an open and a closed controller. Thistype of controller can be used if the disturbance, e.g., a heat load in a system, canbe measured. The open loop is then compensating for the disturbance before ithas had an effect on the system. This is done by formulating a model of how thesystem reacts to the disturbance and compensate for it. The closed loop controllertakes care of the model error. The feed forward regulator increases the accuracyand stability.
12

Chapter 3
Preliminary design and calculations
3.1 Orientation and direction
The main target of the experiment is to observe the Crab nebula and the CygnusX-1, the position of these two and the sun can be viewed in table 3.1. To do thethermal analysis the heat load from the Sun, the Albedo and Earths IR has to beestimated. The heat load from the sun is estimated by calculating the solar angleand the rotational angle, where the solar angle is the angle between the aimingdirection and the sun and the rotational angle is the angle between the Sun andthe vertical axis of ALBERT . The first step is to calculate the elevation and theazimuth, shown in figure 3.1.
When ALBERT is aiming at the Crab nebula the solar angle becomes 69◦ andthe rotational angle is displayed in figure 3.1. The result is that ALBERT can attimes be exposed to direct sun light. For the second case, aiming at the CygnusX-1 the solar angle becomes 129◦ and the rotational angle is displayed in figure 3.1.This results in that when aiming at Cygnus X-1 ALBERT will be shaded by thegondola.
3.2 Thermal environment
3.2.1 Ascent
During the ascent ALBERT will pass through the troposphere (from 0 to 11 km)and then stop in the stratosphere (from 11 to 50 km) at an altitude of 40 km. Theduration of the ascent will be 100-120 min [3] and ALBERT will be subjected to
Coordinates Sun Crab Nebula Cygnus X-1
R.A.: 09h40m36s 05h34m32s 19h58m22s
Dec: 13◦ 54´ 47´´ 22◦ 00´ 52´´ 35◦ 12´ 06´´
Table 3.1. Coordinates for the Sun [10] and the targets of the experiment [2]
13

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
Figure 3.1. Left top: Elevation and azimuth to Crab, Right top: Elevation andazimuth to Cygnus, Left bottom: Rotational angle to Sun when aiming at Crab,Right bottom: Rotational angle to Sun when aiming at Cygnus
temperature change by the surrounding air, irradiation of the sun, the albedo andEarth’s IR. This will cause heat or cooling loads that can vary a lot during theascent depending on the weather and altitude of the clouds. The temperature inthe air surrounding ALBERT during the ascent was obtained with a model fromNASA [11]. The model is an approximation since there are seasonal variations intherms of thickness, temperature and density. The temperature profile in figure 3.2was calculated with the following equations
T =59− 0.0011h
0.5550m ≤ h < 11022m (3.1)
T =−70
0.55511022m < h < 25105m (3.2)
T =205.5 + 4.9987× 10−4h
0.55525105 ≤ h (3.3)
The attitude control system will be tested during the ascent hence the orientation isuncertain [3]. This makes any assessments of the heat load very hard. The auroralequipment in ALBERT will first be turned on when the balloon has reached itsaltitude. This means that the temperature in the vessel is not as crucial as duringobservation but still should be kept within certain limits. The storage temperature
14

3.2. THERMAL ENVIRONMENT
0 10 20 30 40 50−60
−50
−40
−30
−20
−10
0
10
20
Altitude [km]
Tem
pera
ture
[deg
ree
C]
Temperature profile in the atmosphere
Figure 3.2. Atmospheric temperature profile [11]
for the PMT is −20 − +50◦C. The temperature should be stabilized at the timewhen the balloon has reached its operating altitude so that the observations canstart at once.
3.2.2 Observation
During the observation, at an altitude of 40 km, the air pressure will be about 0.3% of the atmospheric pressure [11], i.e., almost vacuum. As a results of this theconvective heat transfer is reduced dramaticlly and will be neglected. Hence onlya radiative heat balance study will be performed. The expected heat load fromexternal sources is the Sun, the Albedo and Earth’s IR.
3.2.3 Internal heat generation
The internal heat generation will support the heating unit when heating is neededand will increase the cooling load if cooling is needed. In both cases the size of theinternal load is interesting. The internal load also affects the power available forheating since ALBERT has a limited power budget of 28 W. The range of internalload is tabulated in 3.2. The actual load has to be measured when the optical setup
15

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
Appliance Power consumption [W]
PMT 0.5 - 6Stepper motor 0 - 3.4
Fans 0.5 - 3Electronics 1 - 2
Table 3.2. Power consumption of different appliances
is tested. This is mainly because of the uncertainties of the duty cycle of the steppermotor and the cooling load of the Peltier element for the PMT.
3.3 Radiative heat balance
The first step of the thermal analysis is to make a radiative heat balance for AL-BERT in space, perpendicular to the Sun and Earth, with different surface coatingsand without the influence from the PoGOLite. This means that the illuminatedarea for this case is the same for the Sun, the Albedo, and Earth’s IR. The emis-sivity ε and the absorptivity αs for the different coatings can be found in AppendixD. The values of the Solar constant S, the Albedo factor f , and the Earth’s IR Eis tabulated in Appendix B. These values are the normal values and the variationcan be rather large. The radiative losses Qlosstospace are equal to the indenced ir-radiation from the Sun QSolar, Albedo QAlbedo and Earths IR QEarthsIR accordingto
Qlosstospace = QSun +QAlbedo +QEarthsIR (3.4)
which can be expanded to
ε σ Ae T4 = S · αsAill + S · f · αsAA + ε · EAE (3.5)
whereE is the heat flux from Earth’s IR [W/m2],Ae is area that is emitting heat [W/m2],AA is the area illuminated by the Albedo [m2],AE is the area illuminated by the Earth’s IR [m2],and Aill is the area illuminated by the Sun [m2].
The result can be viewed in table 3.3 and it shows that different coatings resultin rather different temperature. Calculations were also made for the case whenALBERT is totally shaded by the gondola. These are shown in table 3.3. For thecase with polished aluminum the temperature difference between the case with sunlight and without is 115◦C for the black paint, 81◦C for the polished aluminium andfor the white paint 35◦C. The temperature variations are quite large consideringthat the inside temperature should be kept at 20± 2◦C .
16

3.4. AIR CIRCULATION
Case Solar irradiation Shaded
Coating Temperature [K] Temperature [K]
White paint 242 207Black paint 332 251
Polished aluminium 416 303
Table 3.3. Temperature of ALBERT with different coatings
3.3.1 Thermal environment on the gondola
The temperature variation between when ALBERT is shaded by the gondola andwhen it is in direct sunlight is rather large. When the orientation of ALBERT inrelation to the gondola and the sun was evaluated it was found that ALBERT wasshaded by the gondola most of the time so total shading of ALBERT was a straightforward decision to reduce temperature variations. This will be done by one plateon each side of ALBERT. The temperature of the gondola is unknown and to furtherreduce the impact from the gondola on ALBERT the backside of ALBERT will beinsulated by thick insulation. The backside of ALBERT is from now on consideredas ideally insulated.
3.4 Air circulation
To select a suitable fan for the air circulation the system curve has to be matchedto an appropriate fan curve so that a satisfactory operating point is achieved. Toobtain the system curve the pressure drop through the heat sink and the pressuredrop in the circulation loop have to be calculated. The first step in the design ofthe air circulation system is to estimate the pressure loss due to the circulation ofthe air as this is the pressure that the circulation fan has to overcome. The systemcurve is then calculated by equation (3.6). A principal sketch of the air flow isshown in figure 3.3. The heat transfer coefficient from the air to the wall and fromthe air to the heat sink will also be calculated in this section. The heat transfercoefficient between air and bench is assumed to be the same as between the air andthe wall.
∆ptotal = ∆pairloop + ∆pheatsink (3.6)
3.4.1 Air circulation loop
A one dimensional model was used to calculate the pressure drop in the air circu-lation loop. The model consists of a duct loop with area Aduct, four branches anda contraction with the area Afan. The total pressure loss ∆p can be calculated bysumming pressure losses according to
∆pairloop = ∆pfan + ∆pbranch + ∆pfriction (3.7)
17

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
Air circ loop
Heat sink
Optical setup
Pressurevessel
Peltier element
Fan
Figure 3.3. Principal sketch of the air flow in circulation loop and the heat sink.
The pressure losses from the fan is due to the rapid area change after the fan andis expressed by
∆pfan = ζfanρw2fan
2(3.8)
wfan is the air speed at the fan outlet[m/s].By assuming that the flow is uniform wfan can be calculated from
wfan = wductAductAfan
(3.9)
wherewduct is the speed of the air flow in the duct [m/s].The branch loss coefficient ζbranch is assumed to be 1.5 and the pressure loss due tothe four branches is calculated by
∆pbranch = 4ζbranchρw2duct
2(3.10)
The friction loss is calculated by assuming that the loop consists of two ducts withthe length L because the boundary layers will probably be disturbed by the u-turnin the front. The hydraulic diameter de is the area of the air flow and the constantC is assumed to be 80 since the geometry of the duct is somewhere between a pipeand parallel plates. The pressure loss due to friction can be calculated by
∆pfriction = 2ζfriction · ρ ·w2duct
2(3.11)
where ζfriction is calculated from
ζfriction = f ·L
de(3.12)
18

3.4. AIR CIRCULATION
0 0.5 1 1.5 20
5
10
15
20
25
Velocity [m/s]
Pre
ssur
e dr
op [P
a]
0 0.5 1 1.5 20
1
2
3
4
5
6
7
8
9
Velocity [m/s]
Hea
t tra
nsfe
r co
effic
ient
[W/m
2 K]
Figure 3.4. Left: Pressure drop in the air circulation loop as a function of air flowspeed, Right: Heat transfer coefficient from air to wall in the pressure vessel as afunction of air velocity
f from
f =C
Re(3.13)
and Re from
Re =w · L
ν(3.14)
The heat transfer coefficient can be calculated from (3.18) when combining theGratz number (3.16) and the Nusselt number (3.17) [7]. In most cases it is con-venient to use the inlet temperature difference rather then the mean logarithmictemperature which involves the outlet temperature. The transition between Numand Nu0 can be made according to
Nu0 =Gz
4
(
1− e−4NumGz
)
(3.15)
Gz = Re · PrL
de(3.16)
whereL is the characteristic length [m],and de the hydraulic diameter [m].
Num = C1 +0.0298Gz1.37
1 + 0.0438Gz0.87(3.17)
whereC1 is dependent on the geometry; 4.36 for circular shape, 3.11 for a triangular shapeand 3.61 for a rectangular shape.
19

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
h =Nu · k
de(3.18)
The heat flux from the wall to the fluid is assumed to be constant. The crosssection of the duct is somewhere between a pipe and a rectangle so the constant C1
is assumed to be 4.The heat transfer coefficient h calculated from (3.18) is increasing rapidly when
the air speed is increasing, see figure 3.4.
3.4.2 Heat sink
Since the Peltier element is working against the heat sink and the efficiency of theelement is highly dependent on the temperature differential it is important thatthe heat sink has a low thermal resistance. Less than 1 K/W is desired to notcompromise the efficiency of the Peltier element. This means that the heat sinkneeds a large heat exchange area and should be made of a material with goodthermal conductivity. The construction is usually a plate with several fins madeout of Aluminium or Copper. Calculations where made to ensure that the selectedheat sink meet the requirements and to obtain the pressure loss through it.
The flow between the fins can be assumed to be spatial, i.e., flow betweenplates with narrow gap in between, and therefore the Reynolds number Re canbe calculated by
Re = 120w s (3.19)
wherew is the air velocity [m/s],and s is the wall to wall distance [mm].
The hydraulic diameter de for a heat sink is calculated from
de = 4sH
s+ 2H(3.20)
The friction factor can be calculated from
f =8 · St
Λapp(3.21)
where Λapp is calculated from
Λapp = Λ− (Λ− 0.5)(
1− e−0.008Gz)
(3.22)
and Λ from
Λ = 0.9
(
H/s
H/s+ 11
)0.19
(3.23)
The pressure loss through the heat sink can then be calculated by
20

3.4. AIR CIRCULATION
0 0.5 1 1.5 2 2.5 30
5
10
15
20
25
Velocity [m/s]
Pre
ssur
e dr
op [P
a]
0 0.5 1 1.5 2 2.5 30
0.5
1
1.5
2
2.5
3
3.5
Velocity [m/s]
The
rmal
res
ista
nce
[K/W
]
Figure 3.5. Left: Pressure drop in the heat sink as a function of air flow speed,Right: Thermal resistance of the heat sink as a function of air velocity
∆pheatsink =
(
ζin+ fL
deζout
)
ρw2
2(3.24)
where ζin is calculated from
ζin = 0.42
(
1−
(
s
t
)2)
(3.25)
wheres is the spacing between the fins [mm]and t is the thickness of the fins [mm].
and ζin from
ζout =
(
1−
(
s
t
)2)2
(3.26)
Figure 3.5 shows that the pressure drop is increasing with increasing air velocity.The heat sink used for the initial Peltier test was, after calculation, found to matchthe thermal requirements at air velocities higher than 0.4 m/s. The heat sink alsomeets the dimensional requirements.
The heat sink is assumed to be isothermal and the Nusselt number can becalculated by equation (3.17) where C1 is dependent on the shape of the heat sinkaccording to
C1 = 2.98 + 4.56
(
1− eH/s−1
8
)
(3.27)
The transition to Nu0 is then done by equation (3.15). Equation (3.18) canthen be used to calculate the heat transfer coefficient shown in figure 3.5. Thefigure shows that the thermal resistance of the heat sink is decreasing rapidly whenthe air velocity is increasing.
21

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
0 0.05 0.1 0.15 0.2 0.25 0.30
5
10
15
20
25
30
35
40
45
50
Volume flow [m3/min]
Pre
ssur
e dr
op [P
a]
Figure 3.6. Pressure drop in the air circulation loop with heat sink as a function ofthe volume flow
3.4.3 Fan
The fan was selected by matching the system curve to a suitable fan curve. The sys-tem curve was calculated by the equation below and is shown in figure 3.6. The fancurve of the selected fan is shown in figure 3.7 which is the San Ace 109P0512A702[14]. The intersections of the fan curve and the system curve is the operating pointat the different voltage input to the fan. When the fan is operating at 12 V thevelocity through the heat sink becomes 2 m/s and the thermal resistance becomes0.19 K/W and when the fan is operating at 10 V the velocity through the heatsink becomes 1.6 m/s and the thermal resistance is 0.23 K/W. The fan fulfills thethermal requirements at 10 V.
3.5 Thermal model
The first estimations showed that the coating and the shading of ALBERT had asignificant impact on the temperature. To make better estimation of the thermalenvironment of ALBERT a one dimensional model was built, see figure 3.8. Inthe model the heat is dissipated through a layer of insulation in the walls, lid andbottom of the inside to the wall of the pressure vessel. The wall is considered asisothermal because of it’s high thermal conductivity and material thickness. Thenthe heat is dissipated through a second layer of insulation on the top and front ofthe pressure vessel. The back side is modeled as ideally insulated. The Albedo is
22

3.5. THERMAL MODEL
System curve
Figure 3.7. The operation point at different voltages i.e. the intersection betweenthe fan curve and the system curve.
Bench
Air
Heat sink Insulation
Pressure vessel
Insulation
Space Earth Albedo
Figure 3.8. A principal sketch of the thermal model
heating the surface on the outside of the second insulation, denoted as AA in theequations below, while heat is radiating to cold space and Earth from the same area,denoted Ae. Heat is gained or dissipated from the outside of the second insulationto Earth depending on the temperature of it.
The heat transfer from or to the outside of the second layer of insulation wascalculated by
Qloss = QAlbedo +QEarthsIR +Qlosstospace (3.28)
where QAlbedo is calculated from
23

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
QAlbedo = SfαsAA (3.29)
QEarthsIR from
QEarthsIR = εσ (1− F12)Ae(
T 4Earth′sIR − T
4out
)
(3.30)
and Qlosstospace from
Qlosstospace = εσF12Ae(
T 4space − T
4out
)
(3.31)
The heat transfer between the nodes inside the vessel was calculated by
Qloss =Tout − TinRtot
(3.32)
The thermal resistance for each node can be found in Appendix E.The view factor F12 was varied between 0.2 and 0.9 and the inside insulation
thickness t1 was varied between 1-10 mm in the simulation. The outside insulationthickness was fixed to 10 mm. The insulation material used in the calculation ispolystyrene and can be found in Appendix C. Two different coatings were simulated;white paint and polished aluminium. If ALBERT is painted with white paint thenthere will be a heat loss and with polished aluminium there will be a heat gain. Thewhite paint results in greater variations in the heat flow, see figure 3.9. An increasein insulation thickness results in less difference in the heat loss for each view factorindependent of the coating. If there is no albedo then the heat loss with the whitepaint does not change significantly but for the case with polished aluminium theheat gain turns into a heat loss, see figure 3.9.
3.6 Testing of Peltier element
A test was performed to evaluate the performance of a commercially available Peltierelement. The test rig consisted of a heat sink with a fan, the Peltier element, and apiece of machined aluminum with insulation around it shown in figure 3.10. The heatsink was used to keep one side of the Peltier element at a fairly constant temperatureof about 23◦C, i.e., ambient room temperature. This was to simulate the insideof the pressure vessel. Three temperature sensors of AD590-type were used tomeasure the temperature. AD590 is a temperature transducer which produces anoutput current that is proportional to the absolute temperature. The transducer wasconnected in series with a resistor and the voltage over the resistor was measured.One transducer was mounted on the heat sink and the other two on the side of thealuminium piece according to figure 3.10. The temperature was logged using a PCwith a PCI-card from National Instruments. To receive the data from the PCI-card an application was developed with National Instruments software, LabView.It is a programming language that visualizes the code in a graphical user interfaceshown in figure 3.11. The test was performed by applying a current to the Peltier
24

3.6. TESTING OF PELTIER ELEMENT
200 220 240 260 280 300 320−40
−30
−20
−10
0
10
20
Outside wall temperature [K]
He
at!
ow
[W
]
Qspace
+Qalbedo
+QE arths IR
−view factor dependent
Qloss
−insulation thickness dependent
200 220 240 260 280 300 320−40
−30
−20
−10
0
10
20
Outside wall temperature [K]
He
at!
ow
[W
]
Qspace
+QE arths IR
−view factor dependent
Qout
−insulation thickness dependent
230 240 250 260 270 280 290 300 310 320 330−20
−15
−10
−5
0
5
10
15
20
Outside wall temperature [K]
He
at!
ow
[W
]
Qspace
+Qalbedo
+QE arths IR
−view factor dependent
Qloss
−insulation thickness dependent
230 240 250 260 270 280 290 300 310 320 330−20
−15
−10
−5
0
5
10
15
20
Outside wall temperature [K]
He
at!
ow
[W
]
Qspace
+QE arths IR
−view factor dependent
Qout
−insulation thickness dependent
Figure 3.9. Left top: White paint with albedo, Right top: White paint withoutalbedo, Left bottom: Polished aluminium with albedo, Right bottom: Polished alu-minium without albedo
element, first cooling it, then switching polarity and heating it. Measurementswere also performed when the aluminium piece only was cooled and heated by thesurrounding. This was done repeatedly with different magnitude of the current.
The results were exported to MATLAB and then processed. Figure 3.12 showsan example of a temperature logging at a current of 0.5 A. Figure 3.12 shows theabsolute value of the voltage, current and power. The voltage is increasing withincreasing temperature when heating and with decreasing temperature when coolingand reaches maximum when the Peltier element is operating at its temperatureextremes. The temperature derivative was calculated for each case. The derivativefor the case with cooling and heating from the surrounding was subtracted from theother cases to get temperature derivative of the Peltier element without any heatlosses. By doing this the heat flow Q caused by the Peltier element can be obtainedaccording to
Q = mc∂T
∂t(3.33)
where m is the mass [kg],c is the specific heat [kJ/kg K]
25

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
Figure 3.10. The test setup used for testing the peltier element
Figure 3.11. The Labview code used to log the temperature
26

3.6. TESTING OF PELTIER ELEMENT
0 500 1000 1500 2000 2500 300010
15
20
25
30
35
40
Time [s]
Tem
pera
ture
[C]
0 500 1000 1500 2000 2500 30000
0.1
0.2
0.3
0.4
0.5
0.6
0.7
Time [s]
Cur
rent
[A] V
olta
ge [V
] Pow
er [W
]
Current [A]Voltage [V]Power [W]
Figure 3.12. Top: An example of a temperature logging at current of 0.5 A, Bottom:An example of the absolute value voltage and power at current of 0.5 A
27

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
−30 −20 −10 0 10 20 30 40 50 60−6
−4
−2
0
2
4
6
8
Delta T [C]
Pow
er [w
]
0.5A0.5A1A1A2A2A3A3A
10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
Temperature difference over the Peltier element [K]
The
rmal
con
duct
ivity
k [W
/K m
]
Figure 3.13. Left: The power consumption as a function of current and temper-ature, Right: Thermal conductivity of the peltier element for different temperaturedifferences
and∂T∂t
is the time derivative of the temperature [K/s].
The energy dissipated or absorbed from the Peltier element, shown in figure3.13, is the energy when there are no losses to the surrounding and no heat lossesthrough the Peltier element. The energy dissipated from the Peltier element at acertain ∆T is higher than the energy absorbed at the same ∆T , see figure 3.13.This is because the energy that is put in to the Peltier element is dissipated on thehot side.
To be able to predict the energy that the Peltier element can move when lossesoccur through the Peltier element an additional test was performed. The aim of thetest was to evaluate the thermal conductivity of the element. The test setup wassimilar to the setup used to test the performance of the Peltier element but in thistest the element was used as a passive component. The top of the aluminium piecewas heated by a resistive wire, see figure 3.14, and insulated with mineral wool. Thetemperature was measured on both side of the Peltier element at steady-state andthe thermal conductivity was calculated from:
k =Qt
A∆T(3.34)
whereA is the area of the Peltier element [m2]and t is the thickness of the element[m].
The thermal conductivity k of the Peltier element was also estimated by usingthe manufacturer data and equation (3.34) to get an estimate. The estimate isbased on the assumption that the energy moved by the Peltier is constant for all∆T. This results in a k of 1.12 W/K m.The actual energy moved by the Peltierelement was then calculated by using the thermal conductivity from the previoustest. The result is showed in figure 3.15. The coefficient of performance COP, which
28

3.6. TESTING OF PELTIER ELEMENT
Figure 3.14. The test setup used for testing the heat transfer through the Peltierelement
is defined as the cooling or heating power divided by the power input is shown infigure 3.15. The COP of the Peltier element decreases with increasing temperaturedifference and increasing current.
Thermal model with Peltier element
By implementing the results from the Peltier tests in the thermal model it is possibleto make rough assessments of the size of the Peltier element that is needed and alsowhich temperature range the element has to operate in. The thermal resistance forthe Peltier element can be found in Appendix E. The results were used to selectanother Peltier element for a second test, see section 4.4.
Test of the PMT thermal properties
The PMT uses a Peltier element along with a heat sink and a fan to keep the sensorat around 0◦C and thereby reduce noise in the measurement. The temperature ofthe sensor can be measured by a thermistor. The manufacturer of PMT recom-mends that the Peltier element is fed with a current of 2 A [12] if the temperature isnot controlled. A current of 2 A results in a power consumption of 4.8 W accordingto the data sheet [12] and since there will be two PMT in ALBERT this causesa significant internal load. The PMT was tested in order to evaluate if the powerconsumption could be reduced by controlling the temperature. The air temperatureduring the test was 23◦C and the temperature during flight will be 20◦C. Lower air
29

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
−30 −20 −10 0 10 20 30 40 50 60−10
−8
−6
−4
−2
0
2
4
6
Delta T [C]
Pow
er w
ith h
eat l
oss
thro
ugh
pelti
er [W
]
0.5A0.5A1A1A2A2A3A3A
−30 −20 −10 0 10 20 30 40 50 60−20
−15
−10
−5
0
5
10
15
20
Delta T [C]
Coe
ffici
ent o
f per
form
ance
CO
P [−
]
0.5A0.5A1A1A2A2A3A3A
Figure 3.15. Left: The energy moved by the Peltier element when losses are in-cluded, Right: Coefficient of performance for the Peltier element at different currentlevels and temperature differences
30

3.6. TESTING OF PELTIER ELEMENT
0 50 100 150 200 250 300 350−10
−5
0
5
10
15
20
25
Time [s]
Tem
pera
ture
[C]
Figure 3.16. The temperature of the PMT sensor when the Peltier element isswitched off
temperature results in lower temperature difference between the PMT sensor andair and should result in lower power consumption.
Figure 3.16 shows that the PMT is heated up quickly when the Peltier elementis turned off. The heat up curve was used to estimate the thermal resistance andthermal mass of the PMT. Figure 3.17 shows that when the Peltier element is oper-ated at the recommended current 2A the sensor temperature becomes −9◦C and thepower consumption is almost 4.4 W , shown in figure 3.17. To maintain a tempera-ture of 0◦C a current of about 1 A is needed. This results in a power consumptionof 1.1 W.
31

CHAPTER 3. PRELIMINARY DESIGN AND CALCULATIONS
0.8 1 1.2 1.4 1.6 1.8 2−12
−10
−8
−6
−4
−2
0
2
4
Current [A]
Tem
pera
ture
[C]
0.8 1 1.2 1.4 1.6 1.8 20.5
1
1.5
2
2.5
3
3.5
4
4.5
Current [A]
Pow
er [W
]
Figure 3.17. Left: The temperature of the PMT sensor at different currents, Right:The power consumption of the PMT Peltier element at different currents
32

Chapter 4
Final design and calculations
4.1 Air circulation
To ensure that the cooling of the PMT is sufficient one fan is mounted at the PMTblowing air into the heat sink of the PMT. This fan is the one supplied by the PMTmanufacturer. The fan selected in the section 3.4.3 is mounted in the back and willcool the heat sink of the Peltier element. The fans run in parallel and push the airforward on one side of the optical setup and drawing it back on the other side, seefigure 4.1
4.2 Insulation
The insulation material chosen for the final design is the Aerogel Spaceloft, seeAppendix C for properties. It has excellent thermal properties and is manufacturedas blankets available in 5 and 10 mm thickness. The aim was to fit 10 plus 5 mm onthe inside but this was not possible everywhere since some of the optical equipment islocated closer than 15 mm to the inside of the pressure vessel. Therefore simulationswere also made with thinner insulation to show how the insulation thickness affectsthe heating load. On the outside of the pressure vessel 5 and 10 mm insulationthickness is simulated. For the final design the 5 mm insulation was selected.
4.3 Heating and cooling
The main temperature controlling device will be the Peltier element. To fine tunethe temperature around the etalons a resistive wire will be taped on the undersideof the optical bench to heat if the air temperature drops. The Peltier element willbe switched off when the temperature difference between the heat sink and wallexceeds 30 K, since it will be more efficient to heat the air due to the large heatloss through the Peltier element. To have enough heating power when the Peltierelement is switched off air heaters are installed. These consist of a resistive wirewrapped around a frame and mounted on the sides of the optical setup. When the
33

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
Figure 4.1. The flow path of the circulated air
Peltier element is switched off the circulation fan should also be switched off or thefan speed should be reduced to a minimum. This is to reduce the losses throughthe Peltier element when it is not used. The fan, cooling the Peltier element of thePMT, is then taking care of the air circulation. The internal heat generation wasassumed to be 8 W in the final calculations.
4.4 Test of selected Peltier element
Based on the initial test of a Peltier element and the initial thermal calculationsa full size Peltier element was selected for further test and implementation in theSimulink model. The selected element is the Supercool PE-127-10-13-S [13]. Theresult of the test is shown in figure 4.2 and the characteristic does not differ muchfrom the Peltier element initially tested. The thermal conductivity is a bit higherthan in the initial tests, see figure 4.2 .
34

4.4. TEST OF SELECTED PELTIER ELEMENT
−30 −20 −10 0 10 20 30 40−20
−15
−10
−5
0
5
10
15
20
Delta T [C]
Coe
ffici
ent o
f per
form
ance
CO
P [−
]
0.5A0.5A1A1A1.5A1.5A2A2A
10 15 20 25 30 35 400
0.5
1
1.5
2
2.5
3
Temperature difference over the Peltier element [K]
The
rmal
con
duct
ivity
k [W
/K m
]
Figure 4.2. Left: Coefficient of performance for the Peltier element at differentcurrent levels and temperature difference, Right: Thermal conductivity of the Peltierelement for different temperature difference
35

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
Insulation
Space EarthAlbedo
ShieldShield
Figure 4.3. A principle sketch of the thermal model
4.5 Thermal model
The thermal model was revised in order to improve the accuracy and to model thetransients during the flight.
4.5.1 Radiative model
The heat loss from the outside wall to space was reformulated to a network modelthat include the shadings. The model is shown in figure 4.3 and describes theradiative balance between ALBERT, the shadings, Space, and Earth. The networkmodel is based on a radiant-energy balance on each surface and expressed in termsof radiosities Ji [9]. The shadings are insulated and are not subjected to a heat fluxwhich means that the surface is in radiative balance, resulting in Ebi = Ji. Sincethe Space and Earth temperatures are constant this is modeled as radiation from ablack body with the emissivity of one, Ebi = Ji .
Ji − (1− εi)∑
j
FijJj = εiEbi (4.1)
Equation (4.2) is valid for all surfaces that are insulated Ji = Ebi and are inradiant equilibrium.
Ji =1
1− Fii
∑
j 6=i
FijJj (4.2)
Equation (4.3) is valid for all surfaces with a specified heat flux.
qi =Aiεi
1− εi(Ebi − Ji) (4.3)
By formulating equation (4.1) and (4.3) for the insulation node and (4.2) for theShield node the array (4.5) is obtained.
36

4.5. THERMAL MODEL
200 220 240 260 280 300 320−40
−30
−20
−10
0
10
20
Outside wall temperature [K]
He
at!
ow
[W
]
Qspace
+Qalbedo
+QE arths IR
−view factor dependent
Qloss
−insulation thickness dependent
Figure 4.4. The heatflow from ALBERT
1 −2 (1− ε1)F12 εiF12 1− F23 0−1 0 1
·
J1
J2
Eb1
= (4.4)
(1− ε1) (F14J4 + F15J5qAlbedo)F24J4 + F25J5
(1−ε1)QlossAillε1
+ F12αs1qAlbedoε1
(4.5)
The result is shown in figure 4.4 and the range of the outside wall temperaturethat has been estimated will be used in the simulations below. The outside temper-ature can vary between 230K and 275K. The insulation thickness has large impacton the heat loss from the vessel but does not affect the temperature on the outsidesignificantly.
4.5.2 Conductive model
The model of heat conduction from the bench to the outside wall was built inSimulink using equation (4.6) and (4.7), based on the thermal resistance listed in
37

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
Appendix E and the data from the test of the Peltier element were used to modelthe Peltier element.
∂Ti∂t
=1
mc
(
∂Qi−1
∂t+∂Qi∂t
+∂Qi+1
∂t
)
(4.6)
∂Qi−1
∂t=Ti − Ti−1
Req(4.7)
4.6 Control system
The control system will consist of several regulators controlling different parts andwill be PID and PD regulators with feed-forward. A sketch of the system principleis shown in figure 4.5. The PID and PD regulators where simulated and designedusing Matlab Simulink. Simulink, as Labview, is a graphical programming languagefor solving differential equations. It is a powerful tool when simulating dynamic andtransient systems that are regulated by control systems.
4.6.1 Temperature control system for the PMT
To model the PMT the thermal resistance and thermal mass had to be estimated.This was done by assuming that the characteristic of the Peltier element was similarto the one tested in section 3.6 and that the size can be scaled linearly. By using(4.8) with ∆T from figure 3.16 and QPeltier from figure 3.13, 3 A, scaled with afactor of 2/3. This gives a thermal resistance of 18 K/W. The thermal mass was es-timated by dividing temperature time derivative, when the PMT was heated by thesurrounding, with the power from the Peltier element according to equation (3.33).The estimations of the thermal resistance and mass were the used in the simulationand the model was validated and adjusted with the data from the test shown in3.16. The result is shown in figure 4.6. A PID controller for the temperature controlof the PMT Peltier element was designed in Simulink and the PID parameters areKP = −7.49 · 10−2, KI = −4.10 · 10−3, KD = −4.87 · 10−1 and N = 1.39 · 10−1.
R =∆T
QPeltier(4.8)
4.6.2 Temperature control system for ALBERT
The PID and PD regulators for controlling the temperature in ALBERT were tunedin Simulink and then adjusted by hand to fulfill the requirements in terms of stabilityand accuracy. The regulators for the bench heaters also uses feed-forward to increasethe accuracy and stability. The feed-forward is based on a model predicting the heatflow from the point in the system where the regulator is regulating the temperature.The heat flow is modeled by
38

4.6. CONTROL SYSTEM
Insulation
Air
BenchPD
PID
PID
Heater
Heater
Peltier
Heat
exchange
Heat
exchange
Feed forward
PID PMT
Feed forward
Reference
Switch
T_air
T_bench
T_PMT
Reference
Reference
Figure 4.5. A principle sketch of the control system
Q =Ti − Ti−1
R(4.9)
The control system will switch off the Peltier element when the temperaturedifference between the heat sink and wall exceeds 30 K, since it will be more efficientto heat the air due to the large heat loss through the Peltier element. The regulatorparameters are shown in table 4.1.
4.6.3 Results from Simulink simulations
The temperatures in ALBERT where simulated for a 24 h period since that is thelength of the mission. The internal load will be switched on when the balloon hasreached its altitude after about 1.5 hours. Figure 4.7 and 4.8 show the temperaturecan be kept at constant 293 K when the outside temperature is 210 K. This case is to
39

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
0 50 100 150 200 250 300 350−10
−5
0
5
10
15
20
25
Time [s]
Tem
pera
ture
[C]
Experimental dataSimulated data
Figure 4.6. Comparison of experimental data with the data from the model.
Bench heater Air heater Peltier element
KP 14.06 5.07 4.48 ·10−2
KI 9.78·10−5 - 2.21·10−4
KD -1.15·103 -16.97 -9.67 ·10−2
N 9.30·10−3 9.30·10−3 1.58·10−3
Table 4.1. PID regulator parameters
40

4.6. CONTROL SYSTEM
0 1 2 3 4 5 6 7 8 9
x 104
200
220
240
260
280
300
Time [s]
Tem
pera
ture
[K]
T
Bench
TAir
Twall
Toutside wall
0 1 2 3 4 5 6 7 8 9
x 104
0
10
20
30
Time [s]
Pow
er [W
]
Bench HeaterPeltierTotalAir Heater
Figure 4.7. The energy consumption and temperatures in ALBERT with 5mmSpaceloft insulation on the outside and a outside temperature of 210K
show that the temperature can be kept within the temperature and power limits atan extremely low temperature. With 5 mm Spaceloft insulation the terminal energyconsumption becomes 26 W and with 10 mm insulation thickness the consumptionbecomes 22 W. Figure 4.9 and 4.10 shows the temperatures and power consumptionwhen the outside wall temperature is 275 K. With 5 mm Spaceloft insulation theterminal energy consumption becomes 13 W and with 10 mm insulation thicknessthe consumption also becomes 13 W. This is because the Peltier element is coolingthe vessel and heat is moved to the wall. With 5 mm insulation the heat is dissipatedthrough the outer insulation and with 10 mm insulation the wall temperature isincreasing. Figure 4.11 is showing how the control system is reacting to a oscillatingoutside temperature. The bench temperature is kept within the limits and the airtemperature is decreasing a few degrees at most.
41

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
0 1 2 3 4 5 6 7 8 9
x 104
200
220
240
260
280
300
Time [s]
Tem
pera
ture
[K]
T
Bench
TAir
Twall
Toutside wall
0 1 2 3 4 5 6 7 8 9
x 104
0
10
20
30
Time [s]
Pow
er [W
]
Bench HeaterPeltierTotalAir Heater
Figure 4.8. The energy consumption and temperatures in ALBERT with 10mmSpaceloft insulation on the outside and a outside temperature of 210K
42

4.6. CONTROL SYSTEM
0 1 2 3 4 5 6 7 8 9
x 104
270
280
290
300
Time [s]
Tem
pera
ture
[K]
T
Bench
TAir
Twall
Toutside wall
0 1 2 3 4 5 6 7 8 9
x 104
0
5
10
15
20
Time [s]
Pow
er [W
]
Bench HeaterPeltierTotalAir Heater
Figure 4.9. The energy consumption and temperatures in ALBERT with 5mmSpaceloft insulation on the outside and a outside temperature of 275K
43

CHAPTER 4. FINAL DESIGN AND CALCULATIONS
0 1 2 3 4 5 6 7 8 9
x 104
275
280
285
290
295
Time [s]
Tem
pera
ture
[K]
T
Bench
TAir
Twall
Toutside wall
0 1 2 3 4 5 6 7 8 9
x 104
0
5
10
15
Time [s]
Pow
er [W
]
Bench HeaterPeltierTotalAir Heater
Figure 4.10. The power consumption and temperatures in ALBERT with 10mmSpaceloft insulation on the outside and a outside temperature of 275K
44

4.6. CONTROL SYSTEM
0 1 2 3 4 5 6 7 8 9
x 104
200
220
240
260
280
300
Time [s]
Tem
pera
ture
[K]
T
Bench
TAir
Twall
Toutside wall
0 1 2 3 4 5 6 7 8 9
x 104
0
10
20
30
Time [s]
Pow
er [W
]
Bench HeaterPeltierTotalAir Heater
Figure 4.11. The power consumption and temperatures in ALBERT with 10mmSpaceloft insulation on the outside and a varying outside temperature
45


Chapter 5
Summary and Conclusions
In this thesis an analysis of the thermal environment of ALBERT has been per-formed, a final design and a control system have been suggested. It was found, inthe preliminary design, that there was a risk that ALBERT would be exposed toSun light and had to be shaded to reduce the temperature range of ALBERT. Dueto the low air pressure at observation altitude only a radiative heat balance studywas performed. It showed that with polished aluminium finish the heat load variedbetween -5 and +5 W and for the white paint finish the heat load varied between-10 and -35 W. The white paint was selected since there was no risk of heat gains.The San Ace 109P0512A702 was selected as the circulation fan. A Peltier elementwas tested and was found to work very efficiently at low current. The model wasrevised for the final design and calculations and simulations were made in Simulink.A larger Peltier element, the Supercool PE-127-10-13-S, was tested and was foundto be suitable. The Aerogel Spaceloft was selected as the insulation material. At275 K the energy consumption for both the case with 5 mm and 10 mm insulationon the outside becomes 13 W. The difference is the pressure vessel wall tempera-ture. For the case with 10 mm, it keeps increasing during the whole simulation.This could mean that if there is an error in the model of the Peltier element thecooling will not be sufficient with 10 mm insulation. With both thicknesses thetemperature and the power limit are kept at 210 K. Therefore the vessel should beinsulated with 5 mm.According to the simulations the air heaters will need to consume about 12 W tomaintain the air temperature. The internal load was assumed to be 8 W. If this innot the case this heat has to be put into the system in some other way. The easiestway, from a design point of view, will be to heat the bench. The bench heater wasdesigned to be able consume 12 W as well. If the internal load is as low as 4 Wit will still be possible to generate the 26 W needed in the extreme case. The sug-gested control system used PID regulators for the air heater and the Peltier elementand a PD regulator with a feed forward controller for the bench heater. The PMTuses a PID regulator with a feed forward controller. The thermal performance ofthe suggested design of ALBERT should be tested. The control system should be
47

CHAPTER 5. SUMMARY AND CONCLUSIONS
tested to validate the function and performance.
48

Appendix A
Pressure test
49


Magnus Sö[email protected]
KTH-ALBERT-20091118Version: 1.0
Pressure test of the ALBERT pressure vessel
IntroductionThe pressure vessel which will contain the auroral diagnostics packagewas pressure tested on the 13-18 th of november. During the balloonflight, scheduled for August 2010, the vessel will contain Nitrogen at 1atm while the outside walls will be subjected to nearly vacuum at analtitude of 40 km. The test was performed to ensure that the vessel isnot leaking.
Pressure vesselThe pressure vessel consists of three main parts: the tube, the lid andthe bottom. The lid and the bottom seal the tube which a O-ring andis tighten with bolted connections. Two windows are mounted on thelid, sealed with O-rings and attached with flanges. On the lid is alsoa electrical connector mounted and sealed with a O-ring. The walls ofthe pressure vessel is 6 mm aluminium. The test setup are shown infigure 1 and the drawings of the pressure vessel is attached as PDF-files.
Experimental setupOne of the windows where replaced with a aluminium dummy of thesame dimensions to be able to connect the helium supply. The heliumsupply consists of a helium tube with a low and high pressure manome-ter and regulator valve. The setup is shown in 1.
MethodThe vessel was pressurized with Helium to approximately 1.5 bar higherpressure the the atmospheric pressure. A helium leak detector was thenused to search the whole assembly for leaks. The detector can detectleaks that are very small. The vessel was the left pressurized for 70hours and readings of the pressure be for and after. A new search for
1

Figure 1: The test setup
leaks was performed. The vessel was then depressurized, repressurizedagain and left for another 24 hours. A last search for leaks was thenperformed with the leak detector.
ResultsThe first search for leaks showed no indications of leakage from the pres-sure vessel. There was a small amount of of leakage on the manometerbut it was considered to not have a significant effect on the test. Afterthe first pressure cycle the pressure loss was less than 2 % and thereno indications of leakage. There where no indcations from the bla ofleakage during and after the second pressure cycle. The pressure lossafter the second pressure cycle was less than 1 %. There where no signsof deformation of the structure of the vessel.
ConclusionThe results show that the pressure vessel for ALBERT is capable ofcontaining a pressure differential that is about 1.5 times higher thanexpected during the flight and there are no indications of leakage fromthe pressure vessel. Hence, the pressure vessel will be able to maintaina pressure of 1 bar inside the vessel while subjected to near vacuum onthe outside during the flight.
2

Appendix B
Solar data
Solar constant S = 1450 [W/m2]Albedo factor f = 0.33The heat flux from Earth’s IR E = 235 [W/m2]Earth’s average temperature TEarth′s IR = 255 [K] [17]
53


Appendix C
Material properties
Material Aluminium T6 Copper Pure Polystyrene Spaceloft
Density [kg/m3] 2780 8933 20 150
Specific heat [kJ/kg K ] 880 385 - -
Thermal conductivity [W/m K] 186 389 3.55 · 10−2 1.36 · 10−2
Table C.1. Material properties for Aluminium T6, Pure copper, Polystyrene [6] andSpaceloft [15].
55


Appendix D
Surface properties
Coating Black paint White paint Polished aluminium
Emissivity 0.84 0.86 0.07
Absorptivity 0.97 0.17 0.13
Table D.1. Emissivity and absorptivity for black paint, white paint and polishedaluminium [16]
57


Appendix E
Thermal resistance
Rair,bottom =1
hAbottom(E.1)
Rair,lid =1
hAlid(E.2)
Rair,wall1 =1
hAin(E.3)
Rbottom =t1
k1Abottom(E.4)
Rlid =t1
k1Abottom(E.5)
Rwall1 =t1k1Am1
(E.6)
Rlid2 =t2
k2Abottom2(E.7)
Rwall2 =t2k2Am2
(E.8)
1
Rintowall=
1
Rair,bottom +Rbottom+
1
Rair,lid +Rlid+
1
Rair,wall1 +Rwall1(E.9)
1
Rwalltoout=
1
Rlid2+
1
Rwall2(E.10)
Rtot = Rintowall +Rwalltoout (E.11)
Amax =2πroutl
2(E.12)
59

APPENDIX E. THERMAL RESISTANCE
Aill =2πroutl
2+ πr2out (E.13)
Abottom = (rin − t1)2 π (E.14)
Abottom2 = (ro + t2)2 π (E.15)
Am1 =Aout1 −Ain1
ln(
Aout1Ain1
) (E.16)
Am2 =Aout2 −Ain2
ln(
Aout2Ain2
) (E.17)
RPeltier =tPeltier
kPeltierAPeltier(E.18)
APeltier =W 2Peltier (E.19)
1
Rintowall=
1
Rair,bottom +Rbottom+
1
Rair,lid +Rlid+
1
Rair,wall1 +Rwall1+
1
Rair,heatsink +RPeltier(E.20)
60

Bibliography
[1] M. Kiss. Licentiate thesis Studies of PoGOLite performance and background
rejection capabilities, Dept. of Physics (KTH Royal Institute of Technology), 2008.
[2] O. Jokiaho et al. AURORAL DIAGNOSTICS FOR POGOLITE ASTROPHYS-
ICAL BALLOON, Dept. of Physics (KTH Royal Institute of Technology), 2009.
[3] P. Mallol. Master thesis A cooling system for PoGOLite - a balloon-bourne soft
gamma-ray polarimeter, 2009.
[4] M. Söderquist. Project Course in Plasma Physics. Mechanical design of AL-
BERT, Dept. of Plasma Physics (KTH Royal Institute of Technology), 2010.
[5] D.M. Rowe. CRC handbook of thermoelectrics,ISBN: 978-0-8493-0146-9, 1994.
[6] E. Granryd. Heat Transfer, Dept. of Applied Thermodynamics and Refrigeration(KTH Royal Institute of Technology), 2005.
[7] Å. Målhammar. Thermal Design for Electronics, version 1.0n, Dept. of EnergyTechnology (KTH Royal Institute of Technology), 2008.
[8] B.Lennartson. Reglerteknikens grunder,Studentlitteratur, Lund, ISBN 91-44-01830-4, 2001.
[9] J. P. Holman. Heat transfer, Ninth Edition, McGraw-Hill companies, New York, 2002.
[10] Solar position. http://faculty.physics.tamu.edu/krisciunas/ra_dec_sun.html,2010-08-05.
[11] Earth atmospheric model http://www.grc.nasa.gov/WWW/K-12/airplane/atmosmet.html
[12] HAMAMATSU. Data sheet H7421 Series Photon Counting Head, 2005.
[13] Supercool. Data sheet Thermoelectric modules, 2004.
[14] Sanyo Denki. Data sheet Cooling systems San Ace, 2004.
[15] Aerogel . Data sheet Spaceloft insulation, 2010.
61

BIBLIOGRAPHY
[16] The Engineering Toolbox (online database for engineering applications)http://www.engineeringtoolbox.com.
[17] W. J. Larson and J. R. Wertz. Space mission analysis and design , ISBN:978-1-6011-9076-5, California, 1999.
62