A Synergy in ISR There is opportunity for close cooperation between the study of (auditory)...
3
A Synergy in ISR • There is opportunity for close cooperation between the study of (auditory) neuroethology, and research in communication, control, and signal processing. • Challenges in understanding neuronal plasticity, learning, active sensing, neuromorphic computation and realization etc., can be addressed by engagement of the systems view – models, signals, formal languages, feedback loops, and hierarchies (levels). • In the area of auditory neuroethology these challenges are being addressed by collaborative teams within ISR, leading to fundamental insights, algorithms, and technological advances (e.g. in robotics) Comments at ISR retreat, May 18, 2007
-
date post
21-Dec-2015 -
Category
Documents
-
view
215 -
download
1
Transcript of A Synergy in ISR There is opportunity for close cooperation between the study of (auditory)...

A Synergy in ISR• There is opportunity for close cooperation between
the study of (auditory) neuroethology, and research in communication, control, and signal processing.
• Challenges in understanding neuronal plasticity, learning, active sensing, neuromorphic computation and realization etc., can be addressed by engagement of the systems view – models, signals, formal languages, feedback loops, and hierarchies (levels).
• In the area of auditory neuroethology these challenges are being addressed by collaborative teams within ISR, leading to fundamental insights, algorithms, and technological advances (e.g. in robotics)
Comments at ISR retreat, May 18, 2007
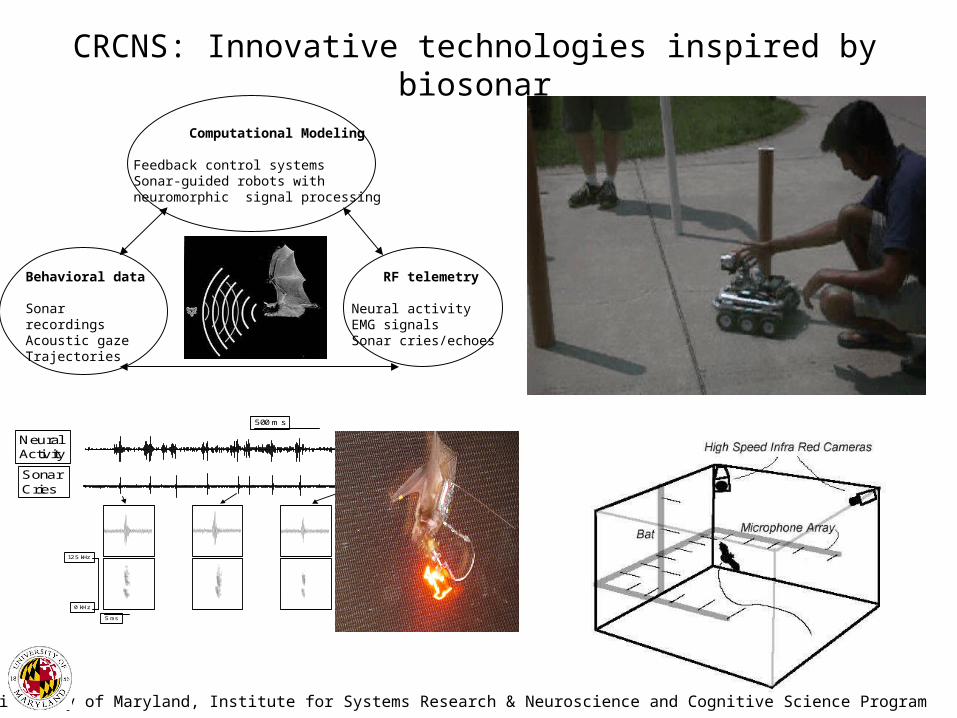
CRCNS: Innovative technologies inspired by biosonar
500 ms
Neural Activity
Sonar Cries
Am pli tude - Right.
13.600 13. 700 13. 800 13. 900 14. 000 sec.
0%
50%
100%
0%
- 50%
- 100%
Am pli tude - Right.
13.600 13. 700 13. 800 13. 900 14. 000 sec.
0%
50%
100%
0%
- 50%
- 100%Sp ec tr ogr a m, FF T s i ze 5 1 2, H am m i ng w in dow - Ri g ht .
1 3. 4 00 1 3. 500 1 3. 600 1 3. 700 13. 8 00 13. 9 00 14 .00 0 se c.
5 kH z
10 kH z
Sp ec tr ogr a m, FF T s i ze 5 1 2, H am m i ng w in dow - Ri g ht .
1 3. 4 00 1 3. 500 1 3. 600 1 3. 700 13. 8 00 13. 9 00 14 .00 0 se c.
5 kH z
10 kH z
A m pl i t ude - Ri g ht .
9. 0 00 9. 1 00 9. 200 9. 3 00 9. 4 00 9. 5 00 9. 600 9. 70 0 se c.
0 %
50 %
10 0 %
0 %
-50 %
-10 0%
A m pl i t ude - Ri g ht .
9. 0 00 9. 1 00 9. 200 9. 3 00 9. 4 00 9. 5 00 9. 600 9. 70 0 se c.
0 %
50 %
10 0 %
0 %
-50 %
-10 0% S p ect r o gr a m , FF T s ize 51 2 , Ha m m in g wi nd ow - Ri ght .
9. 0 00 9. 1 00 9. 2 00 9. 300 9.4 00 9.5 00 9. 6 00 9 . 700 se c.
5 kHz
10 kHz
S p ect r o gr a m , FF T s ize 51 2 , Ha m m in g wi nd ow - Ri ght .
9. 0 00 9. 1 00 9. 2 00 9. 300 9.4 00 9.5 00 9. 6 00 9 . 700 se c.
5 kHz
10 kHz
A m pl i t ude - Rig ht .
17. 6 00 1 7. 700 1 7.8 00 17. 9 00 18. 0 00 1 8. 100 1 8. 200 18. 30 0 se c.
0 %
50 %
100 %
0 %
-50 %
-10 0 %
A m pl i t ude - Rig ht .
17. 6 00 1 7. 700 1 7.8 00 17. 9 00 18. 0 00 1 8. 100 1 8. 200 18. 30 0 se c.
0 %
50 %
100 %
0 %
-50 %
-10 0 % S p ect r o gra m , FF T si ze 512 , Ha m mi n g wi nd ow - Rig ht .
17. 6 00 1 7. 7 00 1 7. 8 00 1 7. 900 1 8. 000 1 8.1 00 1 8.2 00 18. 30 0 se c.
5 kHz
10 kHz
S p ect r o gra m , FF T si ze 512 , Ha m mi n g wi nd ow - Rig ht .
17. 6 00 1 7. 7 00 1 7. 8 00 1 7. 900 1 8. 000 1 8.1 00 1 8.2 00 18. 30 0 se c.
5 kHz
10 kHz
125 kHz
0 kHz
5 ms
Behavioral data
Sonar recordingsAcoustic gazeTrajectories
RF telemetry
Neural activity EMG signals Sonar cries/echoes
Computational Modeling
Feedback control systems Sonar-guided robots with neuromorphic signal processing
University of Maryland, Institute for Systems Research & Neuroscience and Cognitive Science Program

( )
( )
ˆ ( ) .
ˆ ( ) .
p p
t
p p
t
p e
p p e e
ru t r z
r
rv t r y
r
r r r
r r r
ˆ ( )pu t ˆ ( )pv t
( )pu t ( )pv t
Bat trajectory
Insect trajectory
Numerical curvatures ofbat trajectory
Theoretical curvatures of bat trajectories determined up to scaling by delayed feedback law
Delayed scatter plot of data from 30 trials, lends support for feedback law with delay of 112 msec
= delay