A ROBOTHUMAN Software System IMA Primitive Agent Hardware Interface A A A A A A A Human Agent Robot...
24
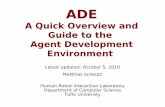
A ROBOT HUMAN Software System IMA Primitive Agent Hardware Interface A A A A A A A Human Agent Robot Agent System Architecture for Human-Robot Interaction Human Interaction Hardware System
-
Upload
cameron-lindsey -
Category
Documents
-
view
218 -
download
0
Transcript of A ROBOTHUMAN Software System IMA Primitive Agent Hardware Interface A A A A A A A Human Agent Robot...

A
ROBOTHUMAN
Software SystemIMA PrimitiveAgent
HardwareInterface
AA A
AA
A
A
HumanAgent
RobotAgent
System Architecture for Human-Robot Interaction
Human Interaction
Hardware System

Welcome to the Center for Intelligent Systems at the Vanderbilt University School of Engineering. CIS conducts research on intelligent robotics and on intelligent manufacturing.
Research Activities and CIS Links: Intelligent Robotics Lab Intelligent Manufacturing Recent Publications CIS-Affiliated Faculty, Students, and Alumni The CIS Newsletter Employment Opportunities
Contact Information:
Center for Intelligent Systems, Vanderbilt University Dr. Kazuhiko Kawamura, Director Dr. Alan Peters, Assistant Director Dr. Mitch Wilkes, Assistant Director Florence (Flo) Fottrell, Administrator Box 131 Station B Nashville, TN 37235 Phone: (615) 322-7269 (Lab), (615) 343-0697 (Office) Fax: (615) 322-7062
Other Links
U.S.-Japan Center Home Page
Vanderbilt University School of Engineering
IEEE RAS Service Robot Technical Committee

Research
Projects under IRL
Publications
Papers Online
People
Faculty, Students, and Alumni
Robot Links
Link to Interesting Robot Sites
Site Contents

Research
Projects under IRL
Publications
Papers Online
People
Faculty, Students, and Alumni
Robot Links
Link to Interesting Robot Sites
Site Contents
Welcome
Welcome to the Intelligent Robotics Laboratory (IRL) at Vanderbilt University's School of Engineering! The IRL is a part of the Center for Intelligent Systems and conducts research on service robots and human/robot symbiosis.
Contact Information:
Director: Dr. Kazuhiko Kawamura Assistant Directors: Dr. M. Wilkes Dr. R.A. Peters II Research Faculty: Dr. G. Biswas Dr. D. Gaines Dr. D. Fisher Dr. P.K. Basu Administrator: Flo Fottrell Lab Manager: Mark Cambron
Web Manager: Tamara Rogers
Intelligent Robotics LabVanderbilt UniversityBox 131 Station BNashville, TN 37235Phone: (615) 322-7269Fax: (615) 322-7062

Research
Projects under IRL
Publications
Papers Online
People
Faculty, Students, and Alumni
Robot Links
Link to Interesting Robot Sites
Site Contents Humanoids
ISAC
Mobile Robots
HelpMate
Bio-Mimetic Control Systems
Associative Memory
Attention System
Sensory Systems
Spreading Activation/Learning
High Level Agent Structure
McKibben Artificial Muscles
Basics
ISAC Arms
Rehabilitation Robotics
Rehab Robotics
Industrial Automation
Intelligent Planners
Industrial Pick and Place Robot
Remote Manufacturing Systems
Intelligent Machine Architecture (IMA)
IMA
IMA II
Anthropomorphic Manipulators
PneuHand
PneuHand II
Robots & the Arts
Theremin Playing
Climber Robot
Robin

ISAC is a dual-arm humanoid robot that was designed and built in the IRL as a research platform for service robotics. The system contains
Two pneumatic 6DOF SoftArms actuated by McKibben artificial muscles.
An air compressor and compressed air delivery system.
A Greifer gripper.
A four fingered, anthropomorphic dexterous manipulator, that we call the PneuHand, designed and built by the IRL.
Two force-torque sensors connected at the arm's wrist joints.
A Directed Perception pan-tilt platform modified in house for independent verge control of two color cameras.
Two 200 MHz Dual processor Pentium Pros. One controls grayscale image processing and the other controls the two SoftArms with two arm controller boards (built in house), and a multi-channel audio signal processor.
One 266 MHz Pentium-2 with two Imagenation color frame grabbers.
One 200 MHz Pentium Pro.
The dual-arm system provides a test-bed to develop new technologies for user-to-robot and robot-to-user communications, including audio, visual, and gestural methods.

The Intelligent Robotics Lab is currently working to incorporate a mobile robot with the ISAC system. The Helpmate mobile robot was donated by Yaskawa Electric of Japan. Helpmate has been upgraded with the following new features:
A 400MHz Pentium II motherboard.
A 5DOF rubbertuator-actuated softarm.
A Lidar sensor for navigation.
A vision system, including CATCH and a PCI color frame grabber.
New control software, based on IMA.
Connection to the Internet via wireless Ethernet
Helpmate will soon become an integral part of the ISAC system. A new software architechture (see related pages for IMA) will allow a combination of local autonomy and user direction, enabling Helpmate to navigate hallways and rooms to accomplish tasks. We are also using HelpMate as a test bed for IMA2, a revised version of IMA.

What Helpmate looked like before we got a hold of it.

A side/front view, showing the sonar arrays, and the arm just hanging there.

This is a rear view, showing the DC-to-AC converter (the black box on the "tailgate"), the air compressor (that red pumpkin-looking thing), the servo valve tree (in the middle), and the manipulator.

Previous SoftArm in a feeding task

ISAC, our dual-arm humanoid, in its original configuration (with the Greifer gripper, the FMA gripper, and the original CATCH pan/tilt/verge head)

A previous version of ISAC, with some of his tools.

D.M. Wilkes, W.A. Alford, R.T. Pack, T.E. Rogers, E.E. Brown, Jr., R.A. Peters II, and K. Kawamura, “Service Robots for Rehabilitation And Assistance", Chapter 2 in Teodorescu and Jain, “Intelligent Systems and Techniques in Rehabilitation”, CRC Press, 1999.
W. A. Alford, T. Rogers, D. M. Wilkes, and K. Kawamura, "Multi-Agent System for a Human-Friendly Robot", Proceedings of the 1999 IEEE International Conference on Systems, Man, and Cybernetics (SMC '99), pp. 1064-1069, October 12-15, 1999, Tokyo, Japan.
K. Kawamura, "Human-Robot Interaction for a Human-Friendly Robot: A Working Paper", Proceedings of the Second International Symposium on HUmanoid RObotics (HURO '99), pp. 77-85, October 8-9, 1999, Tokyo, Japan.
A. Alford, S. Northrup, K. Kawamura, K-W. Chan, "Music Playing Robot", Proceedings of the International Conference on Field and Service Robotics (FSR '99) , pp. 174-178, August 29-31, 1999, Pittsburgh, PA.
Recent Publications
1999

S. Charoenseang, A. Srikaew, D.M. Wilkes, and K. Kawamura, "3-D Collision Avoidance for the Dual-Arm Humanoid Robot", IASTED International Conference on Robotics and Manufacturing, Banff, Canada, July, 1998
D.M. Wilkes, A. Alford, R.T. Pack, T. Rogers, R.A. Peters II, and K. Kawamura, "Toward Socially Intelligent Service Robots", Applied Artificial Intelligence, An International Journal, vol. 12, pp. 729-766, 1998.
A. Srikaew, M.E. Cambron, S. Northrup, R.A. Peters II, D.M. Wilkes, and K. Kawamura, "Humanoid Drawing Robot", IASTED International Conference on R obotics and Manufacturing, Banff, Canada, July, 1998.
S. Charoenseang, A. Srikaew, D.M. Wilkes, and K. Kawamura, "Integrating Visual Feedback and Force Feedback in 3-D Collision Avoidance for a Dual-Arm Humanoid Robot", Proceedings of 1998 International Conference on Systems, Man and Cybernetics , California, USA, October, 1998.
Recent Publications
1998

Recent Publications
1997 D.M. Wilkes, R.T. Pack, W.A. Alford, and K. Kawamura, "HuDL, A Design Philosophy for Socially Intelligent Service Robots", working notes of the AAAI Symposium on Socially Intelligent Agents, November, 1997
R.T. Pack, D.M. Wilkes, and K. Kawamura, "A Software Architecture for Integrated Service Robot Development", 1997 IEEE Conf. On Systems, Man, and Cybernetics, Orlando, pp. 3774-3779, September, 1997.
A. Alford, D. M. Wilkes, K. Kawamura, and R.T. Pack, "Flexible Human Integration for Holonic Manufacturing Systems", Proceedings of the World Manufacturing Congress, New Zealand, pp. 646-651, November, 1997.
R.T. Pack, D. M. Wilkes, G. Biswas, and K. Kawamura, "Intelligent Machine Architecture for Object-Based System Integration", Proceedings of the 1997 IEEE/ASME International Conference on Advanced Intelligent Mechatronics , Waseda University, Japan, June 1997.

Motivated by desire for natural human-robot interaction
Encapsulates what the robot knows about the human
Identity Location Intentions
Human Agent

Model of the current human: description of the current human
Human activity: description of what the user is doing
User’s request: the nature of the interaction, the task the user request of the robot
Human Agent Internal Model

Model of the Human
NameStan
EmotionHappy
CommandWatch me
Face Location(x,y,z) = (122, 34, 205)
Hand Locations(x,y,z) = (85, -10, 175)(x,y,z) = (175, 56, 186)

Model of the Human
NameStan
EmotionSad
CommandWatch me
Face Location(x,y,z) = (122, 34, 205)
Hand Locations(x,y,z) = (85, -10, 175)(x,y,z) = (175, 56, 186)
(x, y,z)(x, y,z)
(x, y,z)
Stan

Detection module
Monitoring module
Identification module
Human Agent Modules

Detection Module
Allows the robot to detect human presence
Uses multiple sensor modalities
IR motion sensor array Speech recognition Skin-color segmentation Face detection

Monitoring Module
Keeps track of the detected human
Localization and tracking algorithms Face tracking Finger pointing gesture Basic speech interface

Identification Module
Under developmentAttempts to identify detected human based on stored model and current model
Voice pattern comparison Name Height Clothing color
Detects changes in dynamic model Clothing color Height