A Probabilistic Approach to Grasp Planning - ROS.org · MotivationPlanner...
30
Motivation Planner Overview Evaluation Conclusion A Probabilistic Approach to Grasp Planning Peter Brook Department of Computer Science University of Washington Willow Garage, Inc September 23, 2010
Transcript of A Probabilistic Approach to Grasp Planning - ROS.org · MotivationPlanner...
Motivation Planner Overview Evaluation Conclusion
A Probabilistic Approach toGrasp Planning
Peter Brook
Department of Computer ScienceUniversity of Washington
Willow Garage, Inc
September 23, 2010
Motivation Planner Overview Evaluation Conclusion
What is grasp planning?
Given an object:I Find a suitable pose for the gripper - 6D search spaceI Find a suitable configuration of the hand joints - nD search
space
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Why is Grasp Planning Easy for Humans?
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
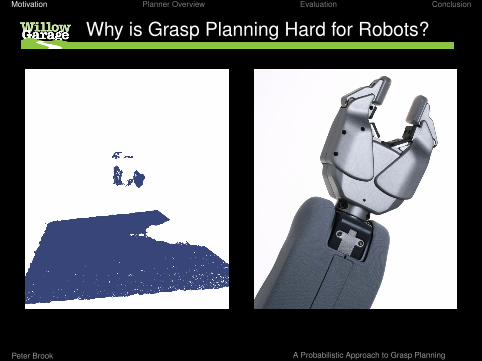
Why is Grasp Planning Hard for Robots?
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
Uncertainty in grasp planning
I Grasp planning requires knowledge of:I a gripperI an object
I These are observed via sensors
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Uncertainty in grasp planning
Real scene Sensed scene
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
Uncertainty in grasp planning
Is incomplete or noisy world information a problem?
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Uncertainty in grasp planning
Yes.
Sensed scene Object detection errorA Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
Video
Play Video
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
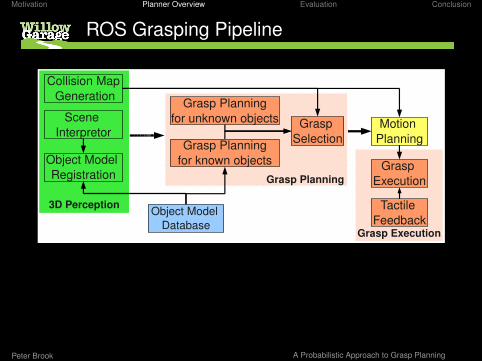
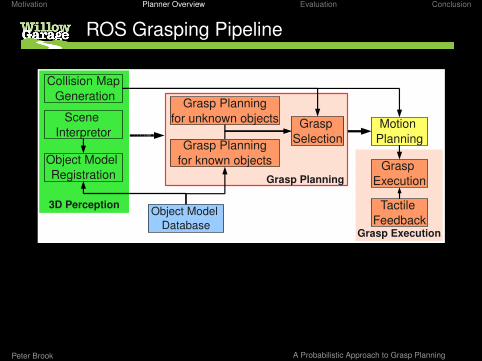
ROS Grasping Pipeline
3D Perception
Grasp Planningfor unknown objects
Collision Map Generation
Scene Interpretor
Motion Planning
Object Model Registration
Object Model Database
Grasp Planningfor known objects
Grasp Selection
Grasp Execution
Grasp Execution
Tactile Feedback
Grasp Planning
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
ROS Grasping Pipeline
3D Perception
Grasp Planningfor unknown objects
Collision Map Generation
Scene Interpretor
Motion Planning
Object Model Registration
Object Model Database
Grasp Planningfor known objects
Grasp Selection
Grasp Execution
Grasp Execution
Tactile Feedback
Grasp Planning
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
ROS Grasping Pipeline
3D Perception
Grasp Planningfor unknown objects
Collision Map Generation
Scene Interpretor
Motion Planning
Object Model Registration
Object Model Database
Grasp Planningfor known objects
Grasp Selection
Grasp Execution
Grasp Execution
Tactile Feedback
Grasp Planning
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
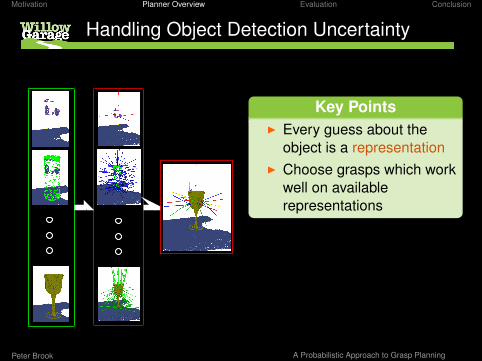
Handling Object Detection Uncertainty
Key PointsI Every guess about the
object is a representationI Choose grasps which work
well on availablerepresentations
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Handling Object Detection Uncertainty
Key PointsI Every guess about the
object is a representationI Choose grasps which work
well on availablerepresentations
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
Handling Object Detection Uncertainty
Key PointsI Every guess about the
object is a representationI Choose grasps which work
well on availablerepresentations
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
How do we Know if a Grasp is Good?
I evaluate grasp on allrepresentations
For point cluster grasps:I Heuristic quality measures
For database objects:I Evaluate grasp in
simulation (expensive)
I Use data-driven regressionfor evaluation
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
How do we Know if a Grasp is Good?
I evaluate grasp on allrepresentations
For point cluster grasps:I Heuristic quality measures
For database objects:I Evaluate grasp in
simulation (expensive)
I Use data-driven regressionfor evaluation
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
How do we Know if a Grasp is Good?
I evaluate grasp on allrepresentations
For point cluster grasps:I Heuristic quality measures
For database objects:I Evaluate grasp in
simulation (expensive)
I Use data-driven regressionfor evaluation
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
How do we Know if a Grasp is Good?
I evaluate grasp on allrepresentations
For point cluster grasps:I Heuristic quality measures
For database objects:I Evaluate grasp in
simulation (expensive)I Use data-driven regression
for evaluation
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Gripper Pose Uncertainty
I Bonus: regression helpswith gripper poseuncertainty
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
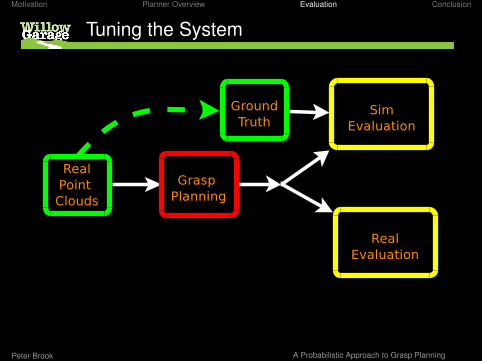
Tuning the System
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Reasoning About Uncertainty Helps
0.0 0.2 0.4 0.6 0.8 1.0
Planner-Estimated Probability
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Perc
enta
ge
of
’Good
’G
rasp
s
Naive Planner
Naive Planner (leave-one-out)
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Reasoning About Uncertainty Helps
0.0 0.2 0.4 0.6 0.8 1.0
Planner-Estimated Probability
0.60
0.65
0.70
0.75
0.80
0.85
0.90
0.95
1.00
Perc
enta
ge
of
’Good
’G
rasp
s
Naive Planner
Naive Planner (leave-one-out)
Probabilistic Planner
Probabilistic Planner (leave-one-out)
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Experimental Success Results
prob. planner naive planner
leave-one-out 22/25 18/25regular detection 22/25 21/25
Table: Number of objects successfully grasped and lifted on the PR2robot.
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Video
Play Video
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Potential for Extension
I More representationsI Primitives (spheres, cylinders, boxes, etc.)I Primitive hierarchies
I More detectors (recognition pipeline)I Don’t hide the uncertaintyI Detector feedback: similar objects should be grasped
similarlyI More objects
I few objects: no generalizationI 50 objects: some generalizationI 1000s of objects: complete generalization?
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Can we Trust Our Sensors?
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Online Tuning
A Probabilistic Approach to Grasp PlanningPeter Brook

Motivation Planner Overview Evaluation Conclusion
Code Availability
I Planner code: probabilistic_grasp_plannerI Documentation:
http://ros.org/wiki/probabilistic_grasp_planner
I Integrated with trunk of grasping pipelineI Will be released with the 0.3 release of
object_manipulation
A Probabilistic Approach to Grasp PlanningPeter Brook
Motivation Planner Overview Evaluation Conclusion
Thanks!
Matei and Kaijen are awesome!Questions?
A Probabilistic Approach to Grasp PlanningPeter Brook