A primal mixed domain decomposition procedure based on the nonconforming streamline diffusion method
17
Applied Numerical Mathematics 50 (2004) 165–181 www.elsevier.com/locate/apnum A primal mixed domain decomposition procedure based on the nonconforming streamline diffusion method Jungho Park R&D Group, KT, 17 Woomyeon-dong, Seocho-gu, Seoul 137-792, South Korea Available online 6 February 2004 Abstract A nonoverlapping iterative domain decomposition procedure by nonconforming primal mixed finite elements is proposed for convection–diffusion problems. We use the nonconforming streamline diffusion method to resolve convection dominated problems, and Robin-type boundary conditions to transmit information between subdo- mains. The convergence of the parallel iterative procedure is shown in detail and numerical examples are given. 2003 IMACS. Published by Elsevier B.V. All rights reserved. 1. Introduction Convection–diffusion problems with a dominating convection term are an elliptic problem. However, the dominating convection feature has a hyperbolic nature. It was observed early on that in contrast to the case for elliptic problems, standard applications of the finite element method to convection dominated problems lead to numerical schemes which frequently do not give reasonable results. To overcome these difficulties, some modified nonstandard finite element methods such as streamline diffusion and discontinuous Galerkin method, can be used. In these nonstandard methods, the streamline diffusion method has been successfully implemented with satisfactory convergence properties. Significantly, John et al. [7] proposed nonconforming streamline diffusion finite element methods for convection–diffusion problems, that is, three bilinear forms of the nonconforming streamline diffusion method have been introduced. On the other hand, the domain decomposition methods for elliptic problems have been studied so much. Developments of overlapping and nonoverlapping domain decomposition methods have been carried out intensively in [3] and [12]. In particular, Lions introduced a parallel nonoverlapping method which uses Robin-type boundary conditions to transmit information between subdomains in [9] and [10]. E-mail address: [email protected] (J. Park). 0168-9274/$30.00 2003 IMACS. Published by Elsevier B.V. All rights reserved. doi:10.1016/j.apnum.2003.12.020
-
Upload
jungho-park -
Category
Documents
-
view
217 -
download
0
Transcript of A primal mixed domain decomposition procedure based on the nonconforming streamline diffusion method

isresolve-
n.
ever,st to theinated
ercomeion and
ementedrmingilinear
died soe been
ethodd [10].
Applied Numerical Mathematics 50 (2004) 165–181www.elsevier.com/locate/apnum
A primal mixed domain decomposition procedure basedon the nonconforming streamline diffusion method
Jungho Park
R&D Group, KT, 17 Woomyeon-dong, Seocho-gu, Seoul 137-792, South Korea
Available online 6 February 2004
Abstract
A nonoverlapping iterative domain decomposition procedure by nonconforming primal mixed finite elementsproposed for convection–diffusion problems. We use the nonconforming streamline diffusion method toconvection dominated problems, and Robin-type boundary conditions to transmit information between subdomains. The convergence of the parallel iterative procedure is shown in detail and numerical examples are give 2003 IMACS. Published by Elsevier B.V. All rights reserved.
1. Introduction
Convection–diffusion problems with a dominating convection term are an elliptic problem. Howthe dominating convection feature has a hyperbolic nature. It was observed early on that in contracase for elliptic problems, standard applications of the finite element method to convection domproblems lead to numerical schemes which frequently do not give reasonable results. To ovthese difficulties, some modified nonstandard finite element methods such as streamline diffusdiscontinuous Galerkin method, can be used.
In these nonstandard methods, the streamline diffusion method has been successfully implwith satisfactory convergence properties. Significantly, John et al. [7] proposed nonconfostreamline diffusion finite element methods for convection–diffusion problems, that is, three bforms of the nonconforming streamline diffusion method have been introduced.
On the other hand, the domain decomposition methods for elliptic problems have been stumuch. Developments of overlapping and nonoverlapping domain decomposition methods havcarried out intensively in [3] and [12]. In particular, Lions introduced a parallel nonoverlapping mwhich uses Robin-type boundary conditions to transmit information between subdomains in [9] an
E-mail address:[email protected] (J. Park).
0168-9274/$30.00 2003 IMACS. Published by Elsevier B.V. All rights reserved.doi:10.1016/j.apnum.2003.12.020

166 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
Recently, modified methods based on [9,10] have been introduced and applied to many problems. Forexample, Douglas et al. [4] studied the analysis of the domain decomposition method with dual mixed
ceduresnlinearl finite
inatedlappingutflowteklov–umann–
iffusionwillin [7].
re with
an beroblemave apecially,
is paperst-lve
n, thiscient inasily andts haveon the
ted tod thelar andction.primalarallel
omainellipticomain
h
finite elements for linear elliptic cases, and the author and Park [11] proposed parallel iterative probased on the nonconforming primal mixed finite element method. Moreover, applications to noparabolic equations with mixed methods and elliptic problems with nonconforming quadrilateraelements were also introduced in [8,5], respectively.
In the literature, however, results of domain decomposition methods for convection domproblems are not as rich as those for diffusion dominated problems. In Espedal et al. [6], a nonoverdomain decomposition scheme with artificial boundary conditions based on the inflow and oboundaries was proposed. In Berselli et al. [2], a new nonoverlapping method related to the SPoincaré operators was introduced, and Achdou et al. [1] proposed a generalization of the NeNeumann algorithm for convection–diffusion problems.
In this paper, we are going to make a new domain decomposition procedure for convection–dproblems. This work is inspired by [7] and [11]. That is, the results for elliptic problems in [11]be extended to the case of convection dominated problems with the bilinear form introducedThe purpose of this paper is to introduce a parallel iterative domain decomposition procedunonconforming primal mixed finite elements for convection dominated problems.
The principal characteristic of the proposed algorithm of this paper is that the algorithm cimplemented very easily and naturally on a massively parallel machine by assigning each subpto its own processor. That is, it is possible that we simply solve the matrix equations which hsmall dimension corresponding to subdomains and calculate these matrices simultaneously. Eswe consider individual finite elements as subdomains in this paper. The proposed method of this implemented in the following way: Suppose thatm is a number of subdomains. If we use the loweorder primal mixed finite element spaces, we treat the 5× 5 matrix equation at each element. We sosimultaneously them matrix equationsAixi = bim
i=1, whereAimi=1 are 5× 5 matrices. After this
calculation, we update the Lagrange multiplier values at each interface (artificial boundary). Theprocess is repeated until the given conditions are satisfied. The procedure of this paper is effithe computation aspect, because the matrices which should be computed can be handled ecalculated in parallel. To the best of the author’s knowledge, methods generating similar resulnot appeared, which is implemented in parallel with individual finite elements as subdomainsconvection dominated problem.
The second characteristic of this result is that we can solve the approximationuh(x, y) and fluxvariableσ h(x, y) at the same time. Actually, there are two kinds of methods which can be treasolveuh(x, y) andσ h(x, y) simultaneously. These are the primal mixed finite element method andual mixed finite element method. Primal and dual mixed methods are devised to yield the scaflux functions at the same time without computing the flux from the approximation of scalar funIn fact, results using the primal mixed method are not well provided. In this paper, we use themixed finite element method. While the algorithm based on the dual mixed method and the piterative procedure with individual finite elements is presented in [4] and the parallel iterative ddecomposition procedure based on the primal mixed method is presented in [11] for generalproblems, the cases of application to convection dominated problem with primal or dual mixed ddecomposition iterative procedures are not introduced yet.
The third characteristic of this paper is having a free parameterχ in the proposed algorithm, whicdoes not have influence on mathematical analysis. That is, although the parameterχ has an arbitrary

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 167
positive value, convergence orders of the algorithm of this paper are not disturbed. This parameter appearson interfaces under given finite elements, so that it can be used to accelerate the iterative procedure written
mberlivered
domain
ns andulated.several
n
t.
s
omese
mline
in this paper by changing it properly with each iteration or interface. This will reduce the iteration nuof the procedure. The mathematical and numerical results for this accelerated algorithm will be dein a forthcoming paper. Some numerical experiments are given in Section 5 by using the iterativedecomposition procedure with a fixed value ofχ .
The remainder of this paper is organized as follows. In Section 2 we begin with some notatiodefinitions. In Section 3, a nonconforming primal mixed domain decomposition procedure is formThe convergence of the iterative procedure is shown in Section 4. Finally, Section 5 providesnumerical examples which show the convergence and quality of the algorithm.
2. Notations and preliminaries
Let Ω be a bounded domain inR2 with smooth boundary∂Ω . Consider the convection–diffusioproblem:
−εu + β · ∇u + cu = f in Ω, (2.1a)
u = 0 on∂Ω, (2.1b)
under the assumptions thatβ, c, f are sufficiently smooth functions, andε is a small positive constanIn practice,ε can be thought of as a smooth function that has small values onΩ .
To get weak formulation for the primal mixed method, we setσ ≡ ε1/2∇u and define function space
Σ = τ ∈ [
L2(Ω)]2
,
Φ0 = H 10 (Ω).
Then, weak formulation of (2.1) by a primal mixed method reads:Find σ , u ∈ Σ × Φ0 such that
(σ ,τ )Ω − (ε1/2∇u,τ
)Ω
= 0, ∀τ ∈ Σ, (2.2a)(ε1/2σ ,∇φ
)Ω
+ (β · ∇u + cu,φ)Ω = (f,φ)Ω, ∀φ ∈ Φ0, (2.2b)
where(· , ·)Ω denotes the inner product inL2(Ω). Note that under assumption
c − 1
2divβ 0, (2.3)
there is a unique solution of (2.2). Actually, the weak formulation by the primal mixed method becthe variational formulation by the Galerkin method naturally becauseε is a positive constant, so thLax–Milgram lemma ensures the statement that there is a unique solution of (2.2).
As we already know, discrete form of (2.2) is stable only if the mesh sizeh is small enough, i.e.,h ε.For practically usableh, stabilized methods should be used. In this paper, we will use the streadiffusion method.

168 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
On the other hand, to describe the nonoverlapping domain decomposition algorithms, we divide thedomainΩ into subdomainsΩj M satisfying
the
ns:
cialmationons as a-definedosition
finiteocedure
s. The
y manytractivemline
j=1
Ω =M⋃
j=1
Ωj, Ωj ∩ Ωk = ∅ if j = k,
and let
Γ = ∂Ω, Γj = Γ ∩ ∂Ωj , Γjk = Γkj = ∂Ωj ∩ ∂Ωk, for all j = k.
In fact,Γjk can be defined only ifj = k and it will be called an interface in this paper. We shall treatcase in whichΩj M
j=1 is a partition ofΩ into individual elements of triangulations.To apply domain decomposition methods to (2.2), we need to impose the consistency conditio
uj = uk, x ∈ Γjk and (2.4a)
σ j · νj + σ k · νk = 0, x ∈ Γjk, (2.4b)
whereνj is the unit outer normal toΩj . (2.4) can be replaced by the Robin boundary condition
σ j · νj + χuj = −σ k · νk + χuk, x ∈ Γjk, (2.5)
with a positive constantχ . Actually, (2.5) means a Robin-type transmission condition on the artifiinterfaces in domain decomposition methods and this is a very simple idea to transmit inforacross interfaces. This makes it possible to combine Dirichlet and Neumann transmission conditiRobin-type transmission condition and then to change the overdetermined subproblems to wellRobin boundary subproblems. We will use the discrete form of (2.5) to derive a domain decompprocedure in the next section.
3. Discrete problems and the domain decomposition procedure
In this section, we shall introduce a primal mixed finite element method with nonconformingelements and streamline diffusion method, and then derive an iterative domain decomposition prto solve convection dominated problems.
First of all, let us review some basic stabilized methods for convection dominated problemstreamline diffusion method by using conforming finite element spaceVh ⊂ H 1
0 (Ω) is to seekuh ∈ Vh
such that
(ε∇uh,∇v)Ω −∑
j
(εuh,j , δβ · ∇v)Ωj+ (β · ∇uh + cuh, v + δβ · ∇v)Ω
= (f, v + δβ · ∇v)Ω, ∀v ∈ Vh, (3.1)
whereδ is a positive constant. This method has been successfully implemented and analyzed bresearchers, but it is known that finite element methods of the nonconforming type are more atthan those of conforming type for many applications. One of nonconforming versions of streadiffusion method is proposed in [7]. LetWh be a nonconforming finite element space, i.e.,Wh ⊂ H 1
0 (Ω),then nonconforming streamline diffusion finite element method is given by seekinguh ∈ Wh such that

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 169
∑ε(∇uh,j ,∇v)Ωj
+ 1
2
[(β · ∇uh,j , v)Ωj
− (β · ∇v,uh,j )Ωj
]
n
llipticinated
ing
e
2.3),
j
+∑
j
(c − 1
2divβ, uh,j v
)Ωj
+ (−εuh,j + β · ∇uh,j + cuh,j , δβ · ∇v)Ωj
+∑e∈I
w⟨[uh]e, [v]e
⟩e=
∑j
(f, v + δβ · ∇v)Ωj, ∀v ∈ Wh, (3.2)
whereI = e: e is an interface (artificial boundary) of triangulations andw is a positive constant. I(3.2), [v]e denotes the jump of a functionv ∈ Wh across the interfacee with unique orientation, namely
[v]e ≡ v|K1 − v|K2,
if e separates two neighboring elementsK1 andK2. Also, 〈· , ·〉e denotes an inner product inL2(e) anduh,j meansuh|Ωj
.In previous section, we reviewed a primal mixed finite element method for continuous e
problems. If we modify Eq. (3.2), we can have a primal mixed version of discrete convection domproblem by using nonconforming finite elements. To get this formulation, let us define that
Σh = τ ∈ [
L2(Ω)]2
: τ |Ωj∈ (P0)
2, (3.3a)
Φh,0 = φ: φj = φ|Ωj
∈P1, φj (ξjk) = φk(ξjk) for all j = k, φ(ξj ) = 0 onΓ, (3.3b)
denoting the centers ofΓj andΓjk by ξj andξjk, respectively. With (3.3), we can get the nonconformdiscrete version of primal mixed streamline diffusion formulation:
Find σ h, uh ∈ Σh × Φh,0 such that
(σ h,τ )Ω −∑
j
(ε1/2∇uh,j ,τ
)Ωj
= 0, ∀τ ∈ Σh, (3.4a)
∑j
(ε1/2σ h,j ,∇φ
)Ωj
+ 1
2
[(β · ∇uh,j , φ)Ωj
− (uh,j ,β · ∇φ)Ωj
]
+∑
j
(c − 1
2divβ, uh,jφ
)Ωj
+ (−ε1/2 divσ h,j + β · ∇uh,j + cuh,j , δβ · ∇φ)Ωj
+∑e∈I
w⟨[uh]e, [φ]e
⟩e=
∑j
(f,φ + δβ · ∇φ)Ωj, ∀φ ∈ Φh,0, (3.4b)
whereσ h,j = σ h|Ωj. Actually, divσ h,j ≡ 0 because of the definitionΣh. From now on, we remove th
termε1/2 divσ h,j in (3.4b) for simplicity.For error estimate of (3.4), we need to assume the slightly stronger condition, with respect to (
c − 1
2divβ c0 > 0. (3.5)
Following [7], we now derive the error estimate:
Theorem 3.1. LetK1,e andK2,e be the finite elements which have a same interfacee in the triangulation.We setcmax = supx∈Ω |c(x)| and assume that(3.5) is satisfied and
0< δ c0/(2c2
max
). (3.6)

170 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
Further, we assume exact solutionu ∈ H 10 (Ω) ∩ H 2(Ω). Then, we have
stimate
(c0‖u − uh‖2
0,Ω +∑
j
δ∥∥β · ∇(uj − uh,j )
∥∥20,Ωj
)1/2
Ch√
λ1 |u|2,Ω + Ch1/2√
λ2
(∑e
|u|22,K1,e∪K2,e
)1/2
, (3.7a)
‖σ − σ h‖0,Ω Ch(1+ √
λ1)‖u‖2,Ω + Ch1/2
√λ2
(∑e
|u|22,K1,e∪K2,e
)1/2
, (3.7b)
where
λ1 ≡ ε + h2 + δ + δ−1h2, λ2 ≡ min
(1
w,h
ε,
1
h
).
Proof. Let us define
ah(u, v) =∑
j
(ε∇u,∇v)Ωj
+ 1
2
[(β · ∇u, v)Ωj
− (u,β · ∇v)Ωj
] +(
c − 1
2divβ, uv
)Ωj
+∑
j
(β · ∇u + cu, δβ · ∇v)Ωj+
∑e
w⟨[u]e, [v]e
⟩e.
If we takeτ = ε1/2∇φ in (3.4a) and this result of (3.4a) is inserted to (3.4b), we have
ah(uh,φ) =∑
j
(f,φ + δβ · ∇φ)Ωj, ∀φ ∈ Φh,0. (3.8)
Assuming that the condition (3.6) is satisfied, John et al. [7] showed that Eq. (3.8) has the error eas follows:
(∑j
ε|uj − uh,j |21,Ωj+ c0‖u − uh‖2
0,Ω +∑
j
δ∥∥β · ∇(uj − uh,j )
∥∥20,Ωj
)1/2
Ch√
λ1 |u|2,Ω + Ch1/2√
λ2
(∑e
|u|22,K1,e∪K2,e
)1/2
,
where
λ1 ≡ ε + h2 + δ + δ−1h2, λ2 ≡ min
(1
w,h
ε,
1
h
).
On the other hand, by (2.2a) and (3.4a), we have
(σ − σ h,τ )Ω −∑
j
(ε1/2∇(uj − uh,j ),τ
)Ωj
= 0, ∀τ ∈ Σh. (3.9)
In (3.9), if we takeτ = σ h − τ h, then we can obtain

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 171
‖σ h − τ h‖20,Ω = (σ h − τ h,σ h − τ h)Ω ∑(
1/2)
n [11].te
= (σ h − τ h,σ h − τ h)Ω + (σ − σ h,σ h − τ h)Ω −j
ε ∇(uj − uh,j ),σ h − τ h Ωj
= (σ − τ h,σ h − τ h)Ω +∑
j
(ε1/2∇(uj − uh,j ),τ h − σ h
)Ωj
‖σ − τ h‖0,Ω‖σ h − τ h‖0,Ω + ε1/2‖σ h − τ h‖0,Ω
(∑j
|uj − uh,j |21,Ωj
)1/2
,
so that
‖σ h − τ h‖0,Ω ‖σ − τ h‖0,Ω + ε1/2
(∑j
|uj − uh,j |21,Ωj
)1/2
, (3.10)
whereτ h is an arbitrary element ofΣh. By triangle inequality,
‖σ − σ h‖0,Ω = ‖σ − τ h + τ h − σ h‖0,Ω ‖σ − τ h‖0,Ω + ‖τ h − σ h‖0,Ω.
Thus, with (3.10) we can derive
‖σ − σ h‖0,Ω 2 infτh∈Σh
‖σ − τ h‖0,Ω + ε1/2
(∑j
|uj − uh,j |21,Ωj
)1/2
Ch‖σ‖1,Ω + ε1/2
(∑j
|uj − uh,j |21,Ωj
)1/2
Ch‖u‖2,Ω + ε1/2
(∑j
|uj − uh,j |21,Ωj
)1/2
,
which completes the proof.Theorem 3.1 indicates that in the convection dominated caseε h, the following (optimal) choice is
necessary:
δ ∼ h, (3.11a)
w ∼ h−2. (3.11b)
With this choice, convergence order of error estimates is consistent with well-known result in [7].From now on, we shall apply the domain decomposition technique to the formulation (3.4) as i
To this end, we need to introduce the Lagrange multiplier on the interfaceΓjk as seen in [11]. SeΛjk = λ: λ|Γjk
∈ P0(Γjk), j = k andΛh = λ: λ|Γjk∈ Λjk, Γjk = ∅. Moreover, we have to defin
that
Σj
h = τ ∈ [
L2(Ωj)]2
: τ ∈ (P0)2,
Φj
h,0 = φ ∈ H 1(Ωj): φ ∈P1(Ωj), φ(ξj ) = 0 onΓ if Γ ∩ ∂Ωj = ∅
,
and set
〈〈f,g〉〉Γ = (fg)(ξ)|Γ |,

172 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
where ξ = ξjk or ξj . For simplicity, now we will write the approximate solutions by dropping thesubscripth. Then, the hybridized nonconforming primal mixed streamline diffusion method is given
f
as follows:Find σ j ∈ Σ
j
h, uj ∈ Φj
h,0, λjk ∈ Λjk, j = 1, . . . ,M, k = 1, . . . ,M such that
(σ j ,τ )Ωj− (
ε1/2∇uj ,τ)Ωj
= 0, ∀τ ∈ Σj
h, (3.12a)
(ε1/2σ j ,∇φ
)Ωj
+ 1
2
[(β · ∇uj ,φ)Ωj
− (uj ,β · ∇φ)Ωj
] +(
c − 1
2divβ, ujφ
)Ωj
+ (β · ∇uj + cuj , δβ · ∇φ)Ωj−
∑k
〈〈λjk, φ〉〉Γjk+
∑k
w〈uj − uk,φ〉Γjk
= (f,φ + δβ · ∇φ)Ωj, ∀φ ∈ Φ
j
h,0, (3.12b)
〈〈µ,uj − uk〉〉Γjk= 0, ∀µ ∈ Λjk. (3.12c)
In (3.12b) it is easy to check that∑
j
∑k w〈uj − uk,φj 〉Γjk
= ∑e∈I w〈[u]e, [φ]e〉e, so the solution o
(3.12) is equivalent to that of (3.4).Now let us formulate an iterative version of (3.12). Consider the Lagrange multiplier to beλjk as seen
from Ωj andλkj as seen fromΩk . Then (2.5) can be modified as
λjk + χuj (ξjk) = −λkj + χuk(ξjk), (3.13)
whereλjk ∈ Λjk andλkj ∈ Λkj , so that
〈〈λjk, φ〉〉Γjk= ⟨⟨−χ(uj − uk) − λkj , φ
⟩⟩Γjk
. (3.14)
By (3.14), we can define the following iterative procedure:
Algorithm 3.1. For all j and k, chooseσ 0j ∈ Σ
j
h , u0j ∈ Φ
j
h,0, λ0jk ∈ Λjk arbitrary and then compute
σ nj , u
nj , λ
njk ∈ Σ
j
h × Φj
h,0 × Λjk recursively by(σ n
j ,τ)Ωj
− (ε1/2∇un
j ,τ)Ωj
= 0, ∀τ ∈ Σj
h, (3.15a)
(ε1/2σ n
j ,∇φ)Ωj
+ 1
2
[(β · ∇un
j , φ)Ωj
− (un
j ,β · ∇φ)Ωj
] +(
c − 1
2divβ, un
jφ
)Ωj
+ (β · ∇un
j + cunj , δβ · ∇φ
)Ωj
+∑
k
⟨⟨χun
j , φ⟩⟩Γjk
+∑
k
w⟨un
j , φ⟩Γjk
=∑
k
⟨⟨χun−1
k − λn−1kj , φ
⟩⟩Γjk
+∑
k
w⟨un−1
k , φ⟩Γjk
+ (f,φ + δβ · ∇φ)Ωj, ∀φ ∈ Φ
j
h,0, (3.15b)
λnjk = −χ
[un
j (ξjk) − un−1k (ξjk)
] − λn−1kj . (3.15c)
We will investigate the convergence of the iterative scheme(3.15) in the next section.
4. The convergence of the iterative procedure
Let us denote
snj ≡ σ j − σ n
j , vnj ≡ uj − un
j , µjk ≡ λjk − λnjk,

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 173
whereσ j , uj , λjk is the solution of (3.12). Then, by (3.12a), (3.12b), (3.13) and (3.15), we have thefollowing error equations:
erms in
(snj ,τ
)Ωj
− (ε1/2∇vn
j ,τ)Ωj
= 0, ∀τ ∈ Σj
h, (4.1a)
(ε1/2sn
j ,∇φ)Ωj
+ 1
2
[(β · ∇vn
j , φ)Ωj
− (vn
j ,β · ∇φ)Ωj
] +(
c − 1
2divβ, vn
j φ
)Ωj
+ (β · ∇vn
j + cvnj , δβ · ∇φ
)Ωj
−∑
k
⟨⟨µn
jk, φ⟩⟩Γjk
+∑
k
w⟨vn
j − vn−1k , φ
⟩Γjk
= 0, ∀φ ∈ Φj
h,0, (4.1b)
µnjk = −χ
[vn
j (ξjk) − vn−1k (ξjk)
] − µn−1kj . (4.1c)
In order to prove the convergence of the procedure (3.15), it would be enough to show that error t(4.1) tend to be zero asn increases.
Theorem 4.1. Let the assumption of(3.6) in Theorem3.1 be fulfilled. Then, the iterative scheme(3.15)is convergent. That is, for allj ,∥∥vn
j
∥∥0,Ωj
= ∥∥uj − unj
∥∥0,Ωj
→ 0 asn → ∞,∥∥snj
∥∥0,Ωj
= ∥∥σ j − σ nj
∥∥0,Ωj
→ 0 asn → ∞,∣∣µnj
∣∣0,Γjk
= ∣∣λjk − λnjk
∣∣0,Γjk
→ 0 asn → ∞.
Proof. In (4.1), if we takeτ = snj andφ = vn
j , then (4.1a) and (4.1b) imply that
(snj , s
nj
)Ωj
+(
c − 1
2divβ,
(vn
j
)2)
Ωj
+ (β · ∇vn
j + cvnj , δβ · ∇vn
j
)Ωj
−∑
k
⟨⟨µn
jk, vnj
⟩⟩Γjk
+∑
k
w⟨vn
j − vn−1k , vn
j
⟩Γjk
= 0. (4.2)
For simplicity, we set
Knj ≡ (
snj , s
nj
)Ωj
+(
c − 1
2divβ,
(vn
j
)2)
Ωj
+ (β · ∇vn
j + cvnj , δβ · ∇vn
j
)Ωj
,
so that (4.2) becomes∑k
⟨⟨µn
jk, vnj
⟩⟩Γjk
= Knj +
∑k
w⟨vn
j − vn−1k , vn
j
⟩Γjk
. (4.3)
Let us define
En ≡∑
j
∑k
∣∣µnjk + χvn
j (ξjk)∣∣20,Γjk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
, (4.4)
for n = 1,2, . . . . Then by (4.1c), (4.3) and (4.4), we can write

174 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
En =∑
j
∑k
∣∣µn−1kj − χvn−1
k (ξjk)∣∣20,Γjk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
=∑
j
∑k
∣∣µn−1jk − χvn−1
j (ξjk)∣∣20,Γjk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
=∑
j
∑k
∣∣µn−1jk + χvn−1
j (ξjk)∣∣20,Γjk
− 4χ∑
j
∑k
⟨⟨µn−1
jk , vn−1j
⟩⟩Γ jk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
=(
En−1 − 2χw∑
j
∑k
⟨vn−2
j , vn−2j
⟩Γjk
)− 4χ
∑j
∑k
⟨⟨µn−1
jk , vn−1j
⟩⟩Γ jk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
.
That is,
En = En−1 − 4χ
[∑j
Kn−1j +
∑j
∑k
w⟨vn−1
j − vn−2k , vn−1
j
⟩Γjk
]
− 2χw∑
j
∑k
⟨vn−2
j , vn−2j
⟩Γjk
+ 2χw∑
j
∑k
⟨vn−1
j , vn−1j
⟩Γjk
= En−1 − 4χ∑
j
Kn−1j − 2χw
∑j
∑k
[⟨vn−1
j , vn−1j
⟩Γjk
− 2⟨vn−1
j , vn−2k
⟩Γjk
+ ⟨vn−2
j , vn−2j
⟩Γjk
].
Now consider the termKn−1j . By the definition ofKn−1
j , we have
Kn−1j
∥∥sn−1j
∥∥20,Ωj
+ c0
∥∥vn−1j
∥∥20,Ωj
+ δ∥∥β · ∇vn−1
j
∥∥20,Ωj
+ (cvn−1
j , δβ · ∇vn−1j
)Ωj
.
By the condition (3.6), we obtain
∣∣(cvn−1j , δβ · ∇vn−1
j
)Ωj
∣∣ δ
2
∥∥cvn−1j
∥∥20,Ωj
+ δ
2
∥∥β · ∇vn−1j
∥∥20,Ωj
δ
2c2
max
∥∥vn−1j
∥∥20,Ωj
+ δ
2
∥∥β · ∇vn−1j
∥∥20,Ωj
c0
4
∥∥vn−1j
∥∥20,Ωj
+ δ
2
∥∥β · ∇vn−1j
∥∥20,Ωj
,
so that
Kn−1j
∥∥sn−1j
∥∥20,Ωj
+ 3
4c0
∥∥vn−1j
∥∥20,Ωj
+ δ
2
∥∥β · ∇vn−1j
∥∥20,Ωj
. (4.5)
From the fact that∑
j
∑k〈vj , vj 〉Γjk
= ∑j
∑k〈vk, vk〉Γjk
, we also have
∑j
∑k
[⟨vn−1
j , vn−1j
⟩Γjk
− 2⟨vn−1
j , vn−2k
⟩Γjk
+ ⟨vn−2
j , vn−2j
⟩Γjk
]
=∑
j
∑k
[⟨vn−1
j , vn−1j
⟩Γjk
− 2⟨vn−1
j , vn−2k
⟩Γjk
+ ⟨vn−2
k , vn−2k
⟩Γjk
]
=∑
j
∑k
∣∣vn−1j − vn−2
k
∣∣20,Γjk
. (4.6)

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 175
Thus, it follows from (4.5) and (4.6) thatn n−1 n−1
merical
of the
re are
nd
E E − F , (4.7)
where
Fn−1 ≡ 4χ∑
j
[∥∥sn−1j
∥∥20,Ωj
+ 3
4c0
∥∥vn−1j
∥∥20,Ωj
+ δ
2
∥∥β · ∇vn−1j
∥∥20,Ωj
]
+ 2χw∑
j
∑k
∣∣vn−1j − vn−2
k
∣∣20,Γjk
. (4.8)
By (4.7) and (4.8),En∞n=1 is a decreasing sequence of nonnegative numbers and we can obtain∑
n
F n < ∞,
which implies
Fn → 0 asn → ∞.
Therefore,‖vnj ‖2
0,Ωj→ 0 and‖sn
j‖20,Ωj
→ 0 asn → ∞, for all j . Also, convergence of|µnjk|0,Γjk
followsfrom (4.1b) as given in [4].
From Theorem 4.1, one can summarize the results as follows:
Theorem 4.2. The iteratesσ nj , u
nj , λ
njk ∈ Σ
j
h × Φj
h,0 × Λjk converge to the solutionσ j , uj , λjk of theglobal hybridized finite element procedure(3.12)in the following senses. Asn approaches∞,
(i) σ nj → σ j = σ ∗|Ωj
in L2(Ωj),(ii) un
j → uj = u∗|Ωjin L2(Ωj),
(iii) λnjk → λjk in L2(Γjk),
whereσ ∗, u∗ ∈ Σh × Φh,0 is the solution of global primal mixed finite element method.
To see the convergence behavior of the iterative scheme (3.15), we perform several nuexperiments in the next section.
5. Numerical examples
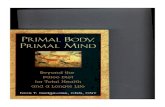
In this section we present numerical results to validate Algorithm 3.1. We compute solutionsmodel problem (2.1), where the domainΩ is the unit square(0,1) × (0,1). For all examples in thissection, we use the uniform triangulation shown in Fig. 1. With this figure, we note that the4n2 + 2n(n − 1) degrees of freedom when thex andy axes of the domain are divided byn, respectively.
In computing approximate solutions, relative error measured in the discreteL∞-norm is used for thestopping criterion of the iteration scheme with 10−5 as tolerance. All computations were written in C arun on SGI origin 2000.

176 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
espectept
find
umber
Fig. 1. The type of triangulation and degrees of freedom.
Fig. 2. Relation betweenχ and iteration number.
Example 1 (Smooth polynomial solution(1)). The right-hand side is chosen such that
u(x, y) = 100(x2 − 2x3 + x4)(y − 3y2 + 2y3),
is the exact solution of (2.1). In this example, we first check the behavior of iteration number with rto positive constantχ . In fact, the constant valueχ in (2.5) and (3.15) has no constrained condition excfor the condition of positive value, so thatχ should be chosen properly.
In order to get numerical data, we consider the caseε = 10−5, β = (10,12) andc = 7. With w = h−1
andδ = h, we can have the following result, shown in Fig. 2.With Fig. 2, it seems that the best choice ofχ is not dependent on mesh size. Moreover, we can
that the iteration numbers are minimized whenχ = 30.0. In this case withχ = 30.0, we can write thefollowing results of error estimate, where DOF, ite #, (I) and (II) denote degrees of freedom, the nof iteration,‖u − uh‖0,Ω and‖σ − σ h‖0,Ω , respectively.

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 177
Table 1Convergence behavior withχ = 30.0
gs toosfy thessicalaxation
tioncan be
withdifferentnt rate.r, theare
slyr atna large
tiveuchcially
t
DOF β = (10,12) c = 7
ite # (I) (II)
20 148 0.1753 6.8587× 10−3
88 167 0.0579 3.9155× 10−3
368 231 0.0141 1.7131× 10−3
1504 322 0.0035 8.1873× 10−4
Table 2Convergence behaviors
DOF β = (10,15) c = 7 β = (15,−10) c = 5 β = (−10,−20) c = 10
ite # (I) (II) ite # (I) (II) ite # (I) (II)
20 142 0.1786 6.9267× 10−3 134 0.1884 6.6211× 10−3 176 0.1867 7.0199× 10−3
88 175 0.0556 3.6475× 10−3 178 0.0838 5.5074× 10−3 229 0.0562 3.5875× 10−3
368 272 0.0138 1.6575× 10−3 272 0.0200 2.4019× 10−3 327 0.0143 1.6771× 10−3
1504 336 0.0034 8.1163× 10−4 336 0.0049 1.1825× 10−3 477 0.0035 8.5714× 10−4
6080 784 0.0009 4.0307× 10−4 932 0.0014 5.7977× 10−4 581 0.0008 4.3817× 10−4
Table 1 shows that Algorithm 3.1 works well with respect to convergence behavior, but it brinmany iterations. Actually, with 1504 degrees of freedom we need 322 iterations in order to satistopping criterion. However, this convergent rate of Algorithm 3.1 is not bad with respect to claiteration method such as SOR method. For example, the SOR method with optimal choice of relparameter has the order of 1− Ch as convergent rate, whereh is a mesh size andC is a constant valuewhich is independent ofh. In addition, it is proved in [11] that a primal mixed domain decomposiprocedure with general elliptic problems has the convergent rate similar to SOR method. Itconfirmed by similar calculation in [11] that a primal mixed domain decomposition procedureconvection dominated problem and classical iterative methods such as SOR method are notin convergent rate. That is, Algorithm 3.1 and classical iterative methods have similar convergeThus, we note that Algorithm 3.1 is competitive with other classical iterative methods. Moreoveprincipal advantage of Algorithm 3.1 is to be parallel implemented. In detail, suppose that therem
individual elements on the triangulation. Then, by the Algorithm 3.1 we only solve simultaneoum
matrix equationsAixi = bimi=1 whereAim
i=1 are 5× 5 matrices and update the Lagrange multiplieeach interface of triangulation later. As we know, a 5× 5 matrix equation is very simple problem. Othe other hand, other classical iterative methods have to handle a matrix equation which hasdimension. For example, if triangulation inducesm degrees of freedom, then the classical iteramethods must deal with a sparsem2 × m2 matrix equation. Each iteration of the methods takes mlarger time than that of our algorithm. Thus Algorithm 3.1 is worth applying to the problems, espeon the parallel environment.
Table 2 shows the results with other choices ofβ andc by settingχ = 30.0. This results verify thaAlgorithm 3.1 leads to good convergence behaviors.
As previously stated in this section, we have made experiments by usingw = h−1. In fact, we havederived that an (optimal) choice ofw is h−2 in (3.11b). However, numerical experiments withw = h−2

178 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
Table 3Convergence behaviors withε = 10−4
ilar to
for
itive to
DOF β = (10,15) c = 7 β = (15,−10) c = 5 β = (−10,−20) c = 10
(I) (II) (I) (II) (I) (II)
20 1.9368 2.1939× 10−1 1.9693 2.2502× 10−1 1.9944 2.1910× 10−1
88 0.5756 1.1952× 10−1 0.5785 1.2077× 10−1 0.5232 1.0119× 10−1
368 0.1575 6.4007× 10−2 0.1574 6.4174× 10−2 0.1591 6.3525× 10−2
1504 0.0399 3.2617× 10−2 0.0399 3.2641× 10−2 0.0461 3.8800× 10−2
6080 0.0098 1.6195× 10−2 0.0097 1.6197× 10−2 0.0118 2.0085× 10−2
Table 4Convergence behaviors withε = 10−5
DOF β = (10,15) c = 7 β = (15,−10) c = 5 β = (−10,−20) c = 10
(I) (II) (I) (II) (I) (II)
20 1.9370 6.9388× 10−2 1.9695 7.1170× 10−2 1.9946 6.9296× 10−2
88 0.5757 3.7805× 10−2 0.5786 3.8200× 10−2 0.5233 3.2008× 10−2
368 0.1574 2.0244× 10−2 0.1574 2.0297× 10−2 0.1592 2.0091× 10−2
1504 0.0400 1.0316× 10−2 0.0400 1.0324× 10−2 0.0462 1.2272× 10−2
6080 0.0100 5.1228× 10−3 0.0100 5.1237× 10−3 0.0118 6.3530× 10−3
Table 5Convergence behaviors withε = 10−6
DOF β = (10,15) c = 7 β = (15,−10) c = 5 β = (−10,−20) c = 10
(I) (II) (I) (II) (I) (II)
20 1.9370 2.1942× 10−2 1.9696 2.2506× 10−2 1.9946 2.1913× 10−2
88 0.5757 1.1955× 10−2 0.5786 1.2080× 10−2 0.5233 1.0122× 10−2
368 0.1575 6.4019× 10−3 0.1575 6.4187× 10−3 0.1592 6.3534× 10−3
1504 0.0399 3.2623× 10−3 0.0399 3.2648× 10−3 0.0461 3.8807× 10−3
6080 0.0103 1.6201× 10−3 0.0102 1.6204× 10−3 0.0119 2.0090× 10−3
are slower than the casew = h−1, though these have convergence orders and error estimates simthe casew = h−1. For efficient experiments, we will use the choice ofw = h−1 in the remainder of thissection. Moreover, we will take the parameterχ = 30.0 through all experiments in this paper.
Example 2 (Smooth polynomial solution(2)). In this example, we will check the convergence ratesthe range ofε. Let δ = h andw = h−1. The right side is chosen such that
u(x, y) = 10sinπx sinπy,
is the exact solution of (2.1).Tables 3, 4, 5 show the errors are reduced as we expected whenε is 10−4, 10−5 and 10−6, respectively.With above results, we can conclude that the convergence order of Algorithm 3.1 is not sens
the valuesε.

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 179
Table 6Convergence behaviors with a layer function
ith
al
ence
in the
hemeolution
utionhod canvection
DOF β = (10,15) c = 7 β = (15,−10) c = 5 β = (−10,−20) c = 10
(I) (II) (I) (II) (I) (II)
20 0.5907 3.4598× 10−2 0.6155 3.5300× 10−2 1.6329 7.3224× 10−2
88 0.6586 3.5297× 10−2 0.6609 3.5263× 10−2 0.6996 3.7128× 10−2
368 0.1566 1.7400× 10−2 0.1573 1.7449× 10−2 0.1442 1.8272× 10−2
1504 0.0825 1.4694× 10−2 0.0831 1.4730× 10−2 0.0732 1.5594× 10−2
6080 0.0200 7.3919× 10−3 0.0201 7.4063× 10−3 0.0188 7.1911× 10−3
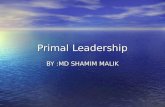
Fig. 3. The computed solutionuh(x, y).
Example 3 (Circular internal layer). In this example, we show the quality of proposed algorithm wthe exact solution which has a circular internal layer. The right side is chosen such that
u(x, y) = 16x(1 − x)y(1− y)
(1
2+ arctan[200(1/16− (x − 1/2)2 − (y − 1/2)2)]
π
)
is the exact solution of (2.1). The above functionu(x, y) is a bell-shaped function which has a internlayer. For numerical experiment, we put the positive constantδ = h, the parameter in jump termsw = h−1
andε = 10−5. Before we check the quality of Algorithm 3.1, it is necessary to verify the convergbehaviors first of all. Table 6 shows the numerical results on several kinds of coefficients.
In spite of an internal layer of the exact solution, we note that proposed algorithm works wellconvergent-behavior aspect.
Now, we investigate the quality of Algorithm 3.1. That is, we verify whether the numerical sccan capture the layer of exact solution without oscillations or not. Fig. 3 shows the computed suh(x, y) whenh = 2−5. Moreover, the error of approximated solution is presented in Fig. 4.
We note the different scaling of thez-axes of the plots. As we see the above results, the layer of solis captured well and oscillations are considerably damped, so that the quality of proposed metbe seen evidently. Consequently, we can say that the Algorithm 3.1 can be applied to the condominated problems successfully.

180 J. Park / Applied Numerical Mathematics 50 (2004) 165–181
ing theevisedrder toments.e of
vergentixed
ectionformedked by
d treatf largedomainresults
,
.
Fig. 4. Error between exact solutionu(x, y) and computed solutionuh(x, y).
6. Conclusions
We have presented a new parallel iterative algorithm for convection dominated problems by usprimal mixed finite element method and the domain decomposition method. This algorithm is dto make it possible that it can be implemented easily and efficiently on a parallel machine. In oderive this algorithm, we also used the streamline diffusion method with nonconforming finite eleWe have considered the case of domainΩ ⊂ R
2 in model problem, but it can be extended to the casdomainΩ ⊂ R
3 easily and naturally.We described the convergence analysis of the designed algorithm. We note that the con
domain decomposition solution of the algorithm is nothing but the solution of global primal mfinite element method. The error estimate of global primal mixed finite element method for convdominated problems was derived. To verify the usefulness of the proposed algorithm, we perseveral numerical experiments. The convergence order and quality of the algorithm are checexperiments.
We have carried out the numerical experiments with constant values forβ and c in order to makethe tests easily. However the numerical results are not different, although we use thatβ and c aresmooth functions. Actually, it is possible to apply the algorithm under the assumptions thatβ and c
are sufficiently smooth functions. In spite of benefits that we can make a parallel application anmatrix equations with a small dimension in computation, the algorithm of this paper has a defect oiteration number. We can make up for this problem by using flexible value forχ instead of constant anfixed value forχ in each iteration step and interface. This leads to accelerated parallel iterative ddecomposition algorithm which can be implemented efficiently. We will present the mathematicalabout the accelerated procedure in a forthcoming paper.
References
[1] Y. Achdou, P.L. Tallec, F. Nataf, M. Vidrascu, A domain decomposition preconditioner for an advection–diffusion problemComput. Methods Appl. Mech. Engrg. 184 (2000) 145–170.
[2] L.C. Berselli, F. Saleri, New substructuring domain decomposition methods for advection–diffusion equations, J. ComputAppl. Math. 116 (2000) 201–220.

J. Park / Applied Numerical Mathematics 50 (2004) 165–181 181
[3] T.F. Chan, T.P. Mathew, Domain decomposition algorithms, Acta Numer. (1994) 61–143.[4] J. Douglas Jr, P.J. Paes Leme, J.E. Roberts, J. Wang, A parallel iterative procedure applicable to the approximate solution
or second
r.
ffusion
put.
omain
i,,
s,
of second order partial differential equations by mixed finite element methods, Numer. Math. 65 (1993) 95–108.[5] J. Douglas Jr, J.E. Santos, D. Sheen, X. Ye, Nonconforming Galerkin methods based on quadrilateral elements f
order elliptic problems, RAIRO Anal. Numer. 33 (1999) 747–770.[6] M.S. Espedal, X.-C. Tai, N. Yan, A hybrid domain decomposition method for advection–diffusion problems, Nume
Algorithms 18 (1998) 321–336.[7] V. John, J.M. Maubach, L. Tobiska, Nonconforming streamline diffusion finite element methods for convection–di
problems, Numer. Math. 78 (1997) 165–188.[8] M.-Y. Kim, E.-J. Park, J. Park, Mixed finite element domain decomposition for nonlinear parabolic problems, Com
Math. Appl. 40 (2000) 1061–1070.[9] P.L. Lions, On the Schwarz alternating method I, in: R. Glowinski, G. Golub, G. Meurant, J. Periaux (Eds.), D
Decomposition Methods for Partial Differential Equations, SIAM, Philadelphia, PA, 1988.[10] P.L. Lions, On the Schwarz alternating method III: A variantfor nonoverlapping subdomains, in: T.F. Chan, R. Glowinsk
J. Periaux, O.B. Widlund (Eds.), Domain Decomposition Methods for Partial Differential Equations, SIAM, PhiladelphiaPA, 1990, pp. 202–223.
[11] J. Park, E.-J. Park, A nonoverlapping domain decomposition with primal mixed finite elements, Preprint.[12] A. Quarteroni, A. Valli, Domain Decomposition Methods for Partial Differential Equations, Oxford University Pres
Oxford, 1999.