A practical approach for estimating the red edge position...
19
A practical approach for estimating the red edge position of plant leaf reflectance G. V. G. BARANOSKI*{ and J. G. ROKNE{ {School of Computer Science, University of Waterloo, 200 University Avenue West, Waterloo, ON N2L 3G1, Canada {Department of Computer Science, The University of Calgary, 2500 University Drive, N.W., Calgary, AB, Canada T2N 1N4 (Received 20 August 2003; in final form 24 June 2004 ) The point of maximum slope on the reflectance spectrum of a plant leaf between red and near-infrared wavelengths is known as the red edge position (REP). The REP is strongly correlated with foliar chlorophyll content, and hence it provides a very sensitive indicator for a variety of environmental factors affecting leaves such as stress, drought and senescence. The REP is also present in spectra for vegetation recorded by remote sensing methods. Due to its importance for the application of inversion procedures, a number of techniques have been developed for determining the REP for foliar spectral reflectance. In this paper a new approach is proposed. It allows an unsupervised estimation of the REP. The accuracy of the new approach is evaluated by comparing REP estimates with values derived from measured spectral data for woody and herbaceous species available in the LOPEX (Leaf Optical Properties Experiment) database. 1. Introduction The abrupt change in the 680–800 nm region of reflectance spectra of leaves caused by the combined effects of strong chlorophyll absorption and leaf internal scattering is called the red edge. The red edge was first described by Collins (1978), and it is perhaps the most studied feature on the vegetation spectral curve according to Schlerf and Atzberger (2001). The existence of the red edge provides the basis for vegetation identification procedures using combinations of red and infrared radiances since the feature is also present in remotely sensed spectra as noted by Horler et al. (1983). The red edge is a feature of the reflectance curve and hence it can only be quantified by reflectance data in the spectral region where it occurs. Instrumentation and methods for measuring the reflectance spectra of vegetation are discussed in for example the works by Kraft (1996) and Zarco-Tejada and Pushnik (2003). It is an area of current research outside the scope of the present paper. A typical plant leaf reflectance spectrum is shown in figure 1. The red edge is a fairly wide feature. Hence it is often characterized by its maximum slope called the red edge position (REP) in order that it may be easily compared with measurements under different conditions and for comparison between different species. *Corresponding author. Email: [email protected] International Journal of Remote Sensing Vol. 26, No. 3, 10 February 2005, 503–521 International Journal of Remote Sensing ISSN 0143-1161 print/ISSN 1366-5901 online # 2005 Taylor & Francis Ltd http://www.tandf.co.uk/journals DOI: 10.1080/01431160512331314029 Downloaded by [University of Waterloo] at 12:50 03 April 2013
Transcript of A practical approach for estimating the red edge position...

A practical approach for estimating the red edge position of plant leafreflectance
G. V. G. BARANOSKI*{ and J. G. ROKNE{{School of Computer Science, University of Waterloo, 200 University Avenue West,
Waterloo, ON N2L 3G1, Canada
{Department of Computer Science, The University of Calgary, 2500 University Drive,
N.W., Calgary, AB, Canada T2N 1N4
(Received 20 August 2003; in final form 24 June 2004 )
The point of maximum slope on the reflectance spectrum of a plant leaf between
red and near-infrared wavelengths is known as the red edge position (REP). The
REP is strongly correlated with foliar chlorophyll content, and hence it provides
a very sensitive indicator for a variety of environmental factors affecting leaves
such as stress, drought and senescence. The REP is also present in spectra for
vegetation recorded by remote sensing methods. Due to its importance for the
application of inversion procedures, a number of techniques have been developed
for determining the REP for foliar spectral reflectance. In this paper a new
approach is proposed. It allows an unsupervised estimation of the REP. The
accuracy of the new approach is evaluated by comparing REP estimates with
values derived from measured spectral data for woody and herbaceous species
available in the LOPEX (Leaf Optical Properties Experiment) database.
1. Introduction
The abrupt change in the 680–800 nm region of reflectance spectra of leaves caused
by the combined effects of strong chlorophyll absorption and leaf internal scattering
is called the red edge. The red edge was first described by Collins (1978), and it is
perhaps the most studied feature on the vegetation spectral curve according to
Schlerf and Atzberger (2001). The existence of the red edge provides the basis for
vegetation identification procedures using combinations of red and infrared
radiances since the feature is also present in remotely sensed spectra as noted by
Horler et al. (1983).
The red edge is a feature of the reflectance curve and hence it can only be
quantified by reflectance data in the spectral region where it occurs. Instrumentation
and methods for measuring the reflectance spectra of vegetation are discussed in for
example the works by Kraft (1996) and Zarco-Tejada and Pushnik (2003). It is an
area of current research outside the scope of the present paper.
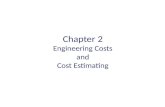
A typical plant leaf reflectance spectrum is shown in figure 1. The red edge is a
fairly wide feature. Hence it is often characterized by its maximum slope called the
red edge position (REP) in order that it may be easily compared with measurements
under different conditions and for comparison between different species.
*Corresponding author. Email: [email protected]
International Journal of Remote Sensing
Vol. 26, No. 3, 10 February 2005, 503–521
International Journal of Remote SensingISSN 0143-1161 print/ISSN 1366-5901 online # 2005 Taylor & Francis Ltd
http://www.tandf.co.uk/journalsDOI: 10.1080/01431160512331314029
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

The transition for the reflectance spectrum of a single leaf specimen to that of a
vegetation canopy has been discussed by a number of authors (Baret et al. 1987,
Zarco-Tejada and Miller 1999). For the purpose of this paper it suffices to note that
a REP is also present in the reflection spectra from canopies.
Chlorophyll concentration is usually an indicator of nutritional stress, photo-
synthetic capacity and senescence. The REP and the chlorophyll concentration are
strongly correlated as first noted by Gates et al. (1965), and more recently by Zarco-
Tejada et al. (2002). Werner and Atzberger (1996) examined the relationship
between chlorosis and necrosis of leaves and the REP, and a general discussion on
the remote sensing of foliar chemistry by spectral measurements was given by
Curran (1991). The REP is also used, for example, to enable on-line control of
nitrogen spreading for site specific top dressing using sophisticated spectrometers
(Heege and Reusch 2003) where it is noted that a difference in REP of one
nanometre may translate to a difference in nitrogen fertilizer requirement of
15 kg ha21 (Heege and Reusch 2003). Hence the determination of the REP might be
directly translated to an economic parameter. Other constituents of plants such as
amaranthin have also been shown to have functional relationships to the red edge as
noted by Curran et al. (1991).
A further interest in the REP is discussed in the work by Danson and Plummer
(1995) who demonstrated a strong nonlinear correlation between leaf area index
(LAI) for a canopy, the one-sided area of leaves per unit of ground area, and the
REP. The LAI is a key spatial variable required to drive models of forest ecosystems
(Nemani et al. 1993), since it provides a quantitative measure of the surface area
available for interception of photosynthetically active radiation (PAR) and
transpiration. Since direct measurement of canopy LAI is labour intensive and
time consuming Pu et al. (2003) extracted the REP from hyperspectral data and used
it to estimate the LAI.
The estimation of the REP, usually applying numerical methods for generating
derivatives for leaf reflectance spectra, is, therefore, a valuable remote sensing tool
to assess the chemical and morphological status of vegetation (Boochs et al. 1990).
The reader interested in a comprehensive review of these applications is referred to
Figure 1. Reflectance spectrum of a fresh soy leaf (Soja hispida) (Hosgood et al. 1995).
504 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

the excellent work by van der Meer and de Jong (2001). The use of derivative
spectrophotometry is also commonly employed to resolve or enhance absorption
features that might be masked by interfering background absorption (Demetriades-
Shah et al. 1990, Filella and Penuelas 1994).
A number of methods for determining the REP have, therefore, been proposed in
the remote sensing literature.
1. The simplest method, first developed by Baret et al. (1987), is based on linear
interpolation. It assumes that the reflectance red edge can be simplified to a
straight line centred around a midpoint between the shoulder reflectance
maximum and the reflectance minimum of the chlorophyll reflectance curve,
which is set usually at about 680 nm. The REP is then estimated by a simple
linear equation using the slope of the line. This method is also used by
Guyot et al. (1992), Danson and Plummer (1995), and more recently by
Clevers and Jongschaap (2001) and Heege and Reusch (2003). A variation
used to estimate the REP for winter-rye crop was given in the work by Heege
and Reusch (2003) as
lp~700z40r 670ð Þzr 780ð Þð Þ=2{r 700ð Þ
r 740ð Þ{r 700ð Þ ð1Þ
where lp is the estimate for the REP and r(670), r(700), r(740) and r(780)
are the reflectances at wavelengths 670, 700, 740 and 780 nm.
2. The inverted Gaussian technique used for example by Bonham-Carter
(1988) and Zarco-Tejada and Miller (1999), was first mentioned by Hare
et al. (1986). It assumes that the data can be fitted by a curve of the form
r lð Þ~rs{ rs{r0ð Þel{l0ð Þ2
2s2 ð2Þ
where r(l) is the reflectance as a function of the wavelength l, r0 is the
reflectance where l5l0 (usually around 680 nm), rs is the ‘shoulder
reflectance’ (frequently set to 800 nm) and s is the Gaussian shape
parameter. The REP is then the inflection point of the curve at lp5s+l0.
A nonlinear equation system would have to be solved in order to find a least-
square fit for (2) to the data. In the work by Bonham-Carter (1988)
constants were selected (choosing between (rs, r0, l0), (rs, r0), (l0) and no
fixed constants) so that the resulting equation can be linearized to a linear
least-squares system, which can be solved easily. In order to compare
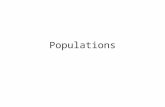
qualitatively with the method proposed in this paper we plot the result of
one example from Zarco-Tejada and Miller (1999) where figure 2 shows the
shape of the estimated reflectance of the inverted Gaussian with l05673,
r050.03, rs50.21, s5lp2l0539. Hence lp5712. For this case, r0 and rs
were selected, and the other two parameters, namely l0 and s, were
computed by an iterative least squares procedure. The model was extensively
tested and evaluated by Miller et al. (1990), and also used by, for example
Schlerf and Atzberger (2001).
3. A three-point Lagrange interpolation technique of the derivative of the
spectral data was given by Dawson and Curran (1998). A finite difference
approximation is applied to four data points of r(l) to generate derivative
Estimating red edge position 505
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

approximations D(li), i51, 2, 3. Then coefficients
A lið Þ~D lið Þ
P3i=j, j~1 li{lj
� � i~1, 2, 3 ð3Þ
are calculated. These coefficients are used to calculate
REP~A l1ð Þ l2{l3ð ÞzA l2ð Þ l1{l3ð ÞzA l3ð Þ l1{l2ð Þ
2P3
i~1 A lið Þð4Þ
It assumes that the derivative curve is a parabola.
4. Another technique locates the REP as the maximum first derivative of the
reflectance spectrum in the region of the red edge using high-order curvefitting techniques such as third-order polynomials to fit the spectrum
(Demetriades-Shah et al. 1990), then computing the maximum of the
derivative in the range of interest (see also Horler et al. 1983, Clevers and
Buker 1991, Railyan and Korobov 1993). Clevers and Jongschaap (2001),
however, noted that such curve fitting techniques are quite complex and
computationally demanding.
Methods 1–3 above were compared by Dawson and Curran (1998) for different
chlorophyll concentrations. It is noted that the red edge position at 50 mg m22
concentration is 705 nm for the Lagrangian, 707 nm for the inverse Gaussian and
715 nm for the linear interpolation. These differences cast some doubt as to where
the actual REP is located. See Broge and Leblanc (2001) for an in-depth discussionof this issue. Furthermore, the REP for the linear method at 50 mg m22 chlorophyll
concentration is exactly the same as the red edge position for both the Lagrangian
and the inverse Gaussian methods at 350 mg m22 chlorophyll concentration. A
previous comparison by Clevers (1994) found good agreement for the same three
methods. This suggests that the choice of wavelength parameters in the methods can
influence the results drastically. The recent paper by Pu et al. (2003) also reviews the
four methods discussed above with the specific aim of using it for forest LAI
estimation. They noted that the correlation with the LAI was high for 4-pointinterpolation and polynomial fitting, medium for Lagrange interpolation and low
for the inverted Gaussian modelling.
Figure 2. Reflectance spectrum for the inverted Gaussian model (redrawn from Zarco-Tejada and Miller (1999)).
506 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

A different issue is highlighted by Pierce (2002) in the description of REDE 1.0
(Red Edge Detection Engine), which is an application designed to detect the spectra
that correspond to vegetation in multi- and hyper-spectral image datasets, and to
compute a red edge location. Pierce distinguishes between supervised and
unsupervised computations. The former is a computation supervised by a human
expert. The latter is a computation done automatically, i.e. it seeks to achieve
reasonably accurate results without the intervention of an expert. Pierce argues thatthe methods in the literature such as the three-point Lagrangian and the inverted
Gaussian methods are satisfactory for supervised, but not for unsupervised
computations for the REP.
These remarks beg the questions of what exactly is the red edge, how can it becomputed, how can the results be reproducible and to what accuracy can the results
be trusted? The aim of this paper is to provide an alternative method for determining
the REP. The proposed method reduces both the unwanted oscillations and the
computational complexity exhibited by fitting higher order polynomials. The
method is also only dependent on a small number of parameters.
The results of a REP should also be reproducible, that is, given the measurements
for the spectrum for the same specimen, the same sensors and the same geometric
arrangement of the sensors the REP should be the same up to the accuracy of
the instrumentation. Also, the computation of the red edge should be
unsupervised without introducing undue complexity. Finally, the evaluation
of the technique used to estimate the REP should be based on comparisons with
values derived from measured data, so that one can assess its usefulness to remotesensing applications.
2. Proposed approach
Railyan and Korobov (1993) acknowledged that the origin and behaviour of the red
edge is not described and explained completely although the main features are
determined by the electron transitions of chlorophyll a and b when exited by
radiation in the appropriate wavelength (Curran 1991). In fact one can find slightly
different ranges for the red edge in the remote sensing literature. Most works in this
area consider the lower bound to be 680 nm, while values for the upper bound vary
from 740 to 800 nm (Horler et al. 1983, Bonham-Carter 1988, Boochs et al. 1990,
Miller et al. 1990, Railyan and Korobov 1993, Filella and Penuelas 1994, Dawsonand Curran 1998).
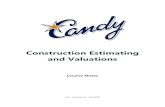
If we consider the graph in figure 3, we note that there are essentially three regions
of reflectance in the the red edge. Initially, there is a region of low and relatively
constant reflectance rl, followed by a rapidly rising reflectance curve, which
corresponds to the red edge. Finally, we observe a region of high and relativelyconstant reflectance rh. For this paper the location of rl is at a location ll and the
location of rh is at a location lh where ll and lh are fixed parameters for all
specimens.
Our goal here is to abstract these features by a new function:
f lð Þ~ azblzcl2
1zdlzel2ð5Þ
of five parameters a, b, c, d and e that will encompass the features rl, rh, ll and lh
Estimating red edge position 507
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

mentioned above. The choice of this function could be viewed as an improvement on
the higher order polynomial fitting procedure given in (Demetriades-Shah et al.
1990). It is well known that polynomials tend to exhibit unwanted oscillations which
tend to be suppressed in rational forms (Burden and Faires 1993). Furthermore, it is
also known that rational functions tend to spread the approximation error more
evenly over the approximation interval. From an evaluation point of view rational
functions are the only functions that can be evaluated directly in a digital computer
using the four operations +, 2, 6, /. The proposed approach can also be viewed as
an improvement to the inverted Gaussian technique since the functional form
developed from it is a much simpler form with similar shape characteristics. A
similar function was also used by Baranoski and Rokne (2002) as a field function for
plotting implicit surfaces.
The method developed in this manner is new and it provides an additional choice
of method for determining the REP beyond the four methods most recently
discussed in a recent paper by Pu et al. (2003). Four of the conditions determining
the parameters a, b, c, d and e are
f llð Þ~rl ð6Þ
f 0 llð Þ~0 ð7Þ
f lhð Þ~rh ð8Þ
f 0 lhð Þ~0 ð9Þ
which requires a decision on the locations of (ll, rl) and (lh, rh). The remaining
condition is that a point (lc, rc) in the red-edge region be chosen from the data.
The four equations (6)–(9) together with the value at lc form a mildly nonlinear
565 system of equations. Although it is possible to solve this system directly, it is
Figure 3. Red edge of a fresh soy leaf (Soja hispida) (Hosgood et al. 1995).
508 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

simpler to shift the coordinate system with a linear transformation, so that new
coordinates are (L, P)5(l2ll, r2rl). The origin of the new coordinate system is
given by the pair (ll, rl), and the upper point of the curve is given by the pair (W, R),
where W5lh2ll and R5rh2rl. This is illustrated in figure 4.
A function
g Lð Þ~ AzBLzCL2
1zDLzEL2ð10Þ
is then considered and equations (6)–(9) are replaced by
g 0ð Þ~0 ð11Þ
g0 0ð Þ~0 ð12Þ
g Wð Þ~R ð13Þ
g0 Wð Þ~0 ð14Þ
To solve these equations we first consider g(0)50 which results in A50. From
g9(0)50 we get B50.
Now g(W)5R results in
R~CW 2
1zDWzEW 2ð15Þ
and g9(W)50 gives
2CW 1zDWzEW 2� �
~ Dz2EWð ÞCW 2 ð16Þ
These two equations can be simplified to
DRWzERW 2~CW 2{R ð17Þ
DRz2EWR~2CW ð18Þ
Figure 4. Shifting the origin of the reflectance curve.
Estimating red edge position 509
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

Using Cramer’s rule we get
D~{2=W ð19Þ
E~C=Rz1=W 2 ð20Þ
which determines D and E in terms of a parameter C. Equation (10) can now be
written as
g Lð Þ~ CL2
1{2L=Wz CR
z 1W 2
� �L2
ð21Þ
The point (rc, lc) on the ascending part of the curve is also translated to a point (Lc,
Pc) in the shifted coordinate system and used to determine C as
C~1=Lc{1=Wð Þ2
1=Pc{1=Rð22Þ
Let now
g Lð Þ~ CL2
1zDLzEL2ð23Þ
where C, D, E are defined by equations (20), (17), (18), respectively. The first
derivative is given by:
g0 Lð Þ~ CL 2zDLð Þ1zDLzEL2� �2
ð24Þ
and the second derivative is given by:
g00 Lð Þ~{2C {1zEL2 3zDLð Þ
� �
1zDLzEL2� �3
ð25Þ
Finally, we set g0(L)50 and solve for L. This equation has three roots, one of which
is in the interval [0, W] of interest. Using the auxiliary quantity
P~ D2{2E� �
E2z
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiD2E4 D2{4Eð Þ
q� �1=3,
E ð26Þ
we get
Ls~1
D{
1{iffiffiffi3p� �
22=3P{
P 1ziffiffiffi3p� �
24=3{1
!
ð27Þ
and REP5Ls+ll.
In general we can write down an algorithm for the estimation of the REP as
follows:
FindREP
1. Input (ll, rl), (lh, rh), (lc, rc).
510 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

2. Compute
W~lh{ll ,
R~rh{rl ,
Lc~lc{ll ,
Pc~rc{rl :
3. Calculate D using equation (19).
4. Calculate E using equation (20).
5. Calculate C using equation (22).
6. Solve for L in the equation g"(L)50 in [0, W] using equations (26) and (27).
7. REP5Ls+ll.
8. (Optional PlotRED) Plot’ estimated red edge, g(l), using equation (23)
shifted in wavelength axis according to ll.
9. (Optional PlotRED) Plot derivative of the estimated red edge, g9(l), using
equation (24).
The method developed above is well suited to data given at three wavelengths. It is
also possible to develop methods that include further information for example data
for f9(ll) or f9(lh). This is left for further investigation.
In table 1 the previously published methods for the REP are compared qualitatively
to the proposed method. Recently, Pu et al. (2003) have compared the performance of
the previously published methods with respect to the extraction of REP from remote
sensing data collected with a hyperspectral sensor. They rated the linear interpolation
technique as the most attractive from an implementation point of view.
Arguably one of the major factors affecting the accuracy of REP estimates is the
sampling characteristics of the sensor. One could claim that a method A provides
more accurate estimates than a method B when applied to data from a sensor C.
However, the reverse could be true considering data from a sensor D. Moreover, the
proximity between estimates provided by two methods does not necessarily mean
that both are accurate since both can be far from the true value.
For these reasons we choose to evaluate the accuracy of the estimates provided by
the proposed approach by comparing them with REP values obtained directly from
measured data instead of values provided by other methods. The dataset used in our
evaluation has a reasonable fine resolution that allows an accurate determination of
the REP to be used as a reference for comparison. One could argue that having such
dataset one would not need a specific approach to determine REP. However, to the
best of our knowledge, fine resolution spectral data is usually not readily available
for a large number of species and for many practical purposes, for example towards
the estimation of the REP from satellite imaging sensors, such as MERIS/
ENVISAT, only a limited number of discrete bands are available over the red edge
region.
3. Evaluation
In our evaluation of the proposed approach we compare estimated red edge curves
with spectral curves originated from measured data. More specifically, in our
Estimating red edge position 511
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

experiments we consider specimens whose reflectance spectra are available in the
LOPEX (Leaf Optical Properties Experiment) database (Hosgood et al. 1995). This
database consists of leaf spectra representative of more than 50 woody and
herbaceous species that were obtained from trees and crops near the Joint Research
Centre in Ispra, Italy. The reflectance spectra stored in the LOPEX database cover a
400–2500 nm wavelength interval with a 1 nm step. In our comparisons we also
Table 1. Quantitative comparison of the five methods.
Linearinterpolation
InvertedGaussian
Lagrangianinterpolation Curve fitting
Rationalfunction (new)
Complexity ofevaluation
low high low low low
Datarequirement
Four datapoints
variable variable Four data points Three datapoints
Approxima-tion properties
poor good good good excellent
Computing thefunction
simple estimating ornonlinear
system
simple solving linearsystem
solving oneequation in one
variable
Remark computationallyattractive
needsexponential
computationallyattractive
computationallyattractive
computationallyattractive
Table 2. Reflectance values for fresh plant leaves of six different species at specifiedwavelengths: ll5680 nm, lc5725 nm and lh5780 nm. Source: LOPEX (Hosgood et al. 1995).
Specimen rl rc rh
Maize 0.0648 0.2839 0.4657Banana 0.0331 0.3749 0.4916Poplar 0.0627 0.3189 0.4691Soy 0.0410 0.3464 0.4655Maple 0.0382 0.2870 0.4126Tomato 0.0452 0.3215 0.4399
Table 3. Comparing methods for estimating red edge positions for fresh chlorophyllous plantleaves of six different species with red edge position derived from measured data (LOPEX).
SpecimenLOPEX
(nm)
Red edge position Relativeerrors
FindREP(%)
FindREP(nm)
Linear inter-polation
Forward differ-entiation
Backwarddifferentiation
Maize 727 722.20 718.68 703.76 738.57 0.66Banana 708 709.67 717.60 702.93 737.62 0.24Poplar 719 717.09 720.46 704.55 739.47 0.29Soy 711 711.42 719.11 703.92 738.75 0.06Maple 710 714.96 716.26 701.81 736.37 0.70Tomato 712 712.68 720.07 704.55 739.48 0.10
512 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

examined the derivatives of these spectral curves which we computed using a three-
point numerical differentiation formula (Burden and Faires 1993). We also applied a
local average smoothing to reduce noise.
The accuracy of REP locating procedures is sensitive to the red edge bounds used
as input parameters. Supervised approaches usually tailor the choice of sample
wavelengths to the specimen at hand. Unsupervised approaches, like the one
Table 4. Summary of the results of the comparisons between measured (LOPEX) andestimated (FindREP) red edge positions considering 80 reflectance spectra of fresh
chlorophyllous plant leaves of different species.
Relative error (%)
Minimum Maximum Average0.007 0.87 0.26
Figure 5. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh maize leaf (Zea mays L.).
Estimating red edge position 513
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

proposed in this paper, use fixed values for these parameters. As mentioned earlier,
one can find slightly different values for these bounds in the literature. In our
experiments we use ll5680 nm and lh5770 nm, which seem to provide a tighter
encapsulation for the red edge region. An optimal choice for a point in the red edge
would be given by rc5REP. Clearly this is not an option since if we already knew
the REP, we would not need to estimate it! Therefore, we simply use the average
lc5(ll+lh)/25725 nm for the method. The effect of making different choices for lc is
discussed in section 5.
In our comparisons we considered 80 spectra derived from reflectance
measurements on fresh individual chlorophyllous leaves, and stored in the
LOPEX database. We selected six illustrative specimens representing herbaceous
and woody species: maize (Zea mays L.), banana (Museta ensete), poplar (Populus
Figure 6. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh banana leaf (Musa ensete).
514 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

tremula L.), soy (Soja hispida), maple (Acer pseudoplatanus L.) and tomato
(Lycopersicum esculentum). Table 2 presents the reflectances (rl, rc and rh) for these
specimens which were also sampled from LOPEX measured data. For completeness,
we also included a summary of the results of our comparisons for all 80 spectra.
4. Results
In the following it is assumed that the comparison results obtained using the
LOPEX data forms the baseline for the evaluation of the new method due to the
high granularity of this data. Figures 5–10 present comparisons between red edge
and derivative curves plotted using PlotRED (which corresponds to the routine
FindREP with the two steps 8, 9 added) and curves derived from LOPEX reflectance
data. A visual inspection of these plots suggests a good agreement between thereflectance curves generated by the new method and curves obtained by detailed
measurements.
Figure 7. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh poplar leaf (Populus tremula L.).
Estimating red edge position 515
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

While the estimated derivative curves present good qualitative agreement with the
derivative curves determined from measured data, quantitative discrepancies are
noticeable, especially for some of the species considered, namely maize (figure 5) and
maple (figure 9). The inflection points of the curves are, however, fairly close,
suggesting that the proposed approach for the estimation of REP presents an
acceptable level of accuracy.
Table 3 presents the REP values derived from the measured reflectance spectrum
of each of the six illustrative specimens, and values estimated using FindREP. For
four of these specimens the relative error is smaller than 0.3%. A comparison was
made with linear interpolation and two variants of the three-point Lagrangian
technique for estimating the REP since these methods use almost the same
information (i.e. data at four wavelengths) as FindREP. The REP values estimated
using these methods are given in table 3, columns 4 to 6. The poor results for the
three-point Lagrangian techniques as these were originally implemented are due to
Figure 8. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh soy leaf (Soja hispida).
516 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

the numerical differentiation needed to obtain the required derivative data. It should
also be noted that the data for these methods was given at 670 nm, 700 nm, 740 nm
and 780 nm, i.e. one additional data point as compared to FindREP.
For all 80 spectra considered in our comparisons the relative error is smaller than
1% (table 4), meaning that the deviation between measured and estimated REP was
always below 7 nm. These figures confirm the observations derived from the visual
inspection of the derivative curves, i.e. the estimated REP values closely
approximate the actual values for the tested specimens.
5. Discussion
The proposed approach for the estimation of the REP assumes no a priori
knowledge about the reflectance spectrum of a given specimen. As with previous
techniques used to estimate the REP, it may be affected by the choice of input
Figure 9. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh maple leaf (Acer pseudoplatanus L.).
Estimating red edge position 517
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

parameters, namely the three wavelength sample positions (ll, lc and lh). Instead of
supervising the choice of these values for each specimen, fixed values (680 nm,
725 nm and 770 nm) were used in the evaluation experiments. As a result the relative
errors fluctuate, but their magnitudes remain within reasonable limits, especially
considering that the comparisons are performed with respect to values derived from
actual measured data, instead of values estimated by other techniques.
The sensitivity of the proposed method to the choice of lc was assessed by
repeating the calculations with lc set to 700 nm and 750 nm. The results of these
calculations are given in tables 5 and 6. It is interesting to note that the results are
still quite good, suggesting that the form of the approximation curve is well suited to
the data.
The analytical solution provided by the proposed approach has the property that
the complex parts cancel out if the arithmetic is exact. Floating point arithmetic,
Figure 10. Estimated (PlotRED) and measured (LOPEX) reflectance and first derivativereflectance spectra for a fresh tomato leaf (Lycopersicum esculentum).
518 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

however, is not exact. As a result, an estimation may have tiny complex parts, in the
order of 10214, which should be discarded. Alternatively, instead of using the closed
formulas given by equations (26) and (27), one could apply a numerical root finding
procedure, such as fzero in Matlab (Hanselman and Littlefield 2001), or an
equivalent in any other numerical software package, with equation (25) as the target
function.
Selecting the ‘best’ REP estimation method is delicate, and no single method is
superior in all the cases. The relative accuracy depends on the biological
characteristics of the specimen at hand. Nonetheless, our experiments suggest that
the proposed algorithmic approach provides REP estimates with reasonably high
accuracy, without requiring human intervention. Hence, it may be suitable for the
estimation and analysis of red edge data in field, laboratory, airborne and
spaceborne settings. Our future efforts will focus on the application of the proposed
approach to estimate REP shifts due to natural seasonal cycles affecting the
concentration of chlorophyll.
ReferencesBARANOSKI, G. and ROKNE, J., 2002, An efficient and controllable blob function. Journal of
Graphics Tools, 6, pp. 41–53.
BARET, F., CHAMPION, I., GUYOT, G. and PODAIRE, A., 1987, Monitoring wheat canopies
with a high spectral resolution radiometer. Remote Sensing of Environment, 22,
pp. 367–378.
Table 5. Comparison between measured (LOPEX) and estimated (FindREP) red edgepositions for fresh chlorophyllous plant leaves of six different species, lc5700.
Specimen
Red edge position (nm)
Relative errors (%)LOPEX FindREP
Maize 727 716.46 1.45Banana 708 710.99 0.42Poplar 719 720.90 0.26Soy 711 714.63 0.51Maple 710 718.30 1.17Tomato 712 718.57 0.92
Table 6. Comparison between measured (LOPEX) and estimated (FindREP) red edgepositions for fresh chlorophyllous plant leaves of six different species, lc5750.
Specimen
Red edge position (nm)
Relative errors (%)LOPEX FindREP
Maize 727 718.89 1.11Banana 708 710.58 0.36Poplar 719 715.15 0.53Soy 711 712.14 0.16Maple 710 714.44 0.62Tomato 712 709.92 0.29
Estimating red edge position 519
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

BONHAM-CARTER, G., 1988, Numerical procedures and computer program for fitting an
inverted Gaussian model to vegetation reflectance data. Computers and Geosciences,
14, pp. 339–356.
BOOCHS, F., DOCKTER, K., KUHBAUCH, W. and KUPFER, G., 1990, Shape of the red edge as
vitality indicator for plants. International Journal of Remote Sensing, 11,
pp. 1741–1753.
BROGE, N. and LEBLANC, E., 2001, Comparing prediction power and stability of broad-
band and hyperspectral vegetation indices for estimation of green leaf area index
and canopy chlorophyll density. Remote Sensing of Environment, 76,
pp. 156–172.
BURDEN, R. and FAIRES, J., 1993, Numerical Analysis, 5th edn (Boston, MA: PWS
Publishing Company).
CLEVERS, J., 1994, Imaging spectrometry in agriculture—plant vitality and yield indicators. In
Imaging Spectrometry—A Tool for Environmental Observations, J. Hill and J. Megier
(Eds) (Dordrecht: Kluwer), pp. 193–219.
CLEVERS, J. and BUKER, C., 1991, Feasibility of the red edge index for the detection of
nitrogen deficiency. Proceedings of the 5th International Colloquium on Physical
Measurement and Signatures in Remote Sensing, Courcheval, France (Courcheval,
France: ESA SP-319), pp. 165–168.
CLEVERS, J. and JONGSCHAAP, R., 2001, Imaging spectrometry for agricultural applications.
In Imaging Spectrometry. Basic principles and prospective applications, F. van der
Meer and S. de Jong (Eds) (Dordrecht: Kluwer), pp. 157–199.
COLLINS, W., 1978, Remote sensing of crop type and maturity. Photogrammetric Engineering
and Remote Sensing, 44, pp. 43–55.
CURRAN, P., 1991, Remote sensing of foliar chemistry. Remote Sensing of Environment, 30,
pp. 271–278.
CURRAN, P.J., DUNGAN, J.L., MACLER, B.A. and PLUMMER, S.E., 1991, The effect of a red
leaf pigment on the relationship between red edge and chlorophyll concentration.
Remote Sensing of Environment, 35, pp. 69–76.
DANSON, F. and PLUMMER, S., 1995, Red edge response to forest leaf area index. International
Journal of Remote Sensing, 16, pp. 183–188.
DAWSON, T. and CURRAN, P., 1998, A new technique for interpolating the reflectance edge
position. International Journal of Remote Sensing, 19, pp. 2133–2139.
DEMETRIADES-SHAH, T., STEVEN, M.D. and CLARK, J.A., 1990, High resolution derivative
spectra in remote sensing. Remote Sensing of Environment, 33, pp. 55–64.
FILELLA, I. and PENUELAS, J., 1994, The red edge position and shape as indicators of plant
chlorophyll content, biomass and hydric status. International Journal of Remote
Sensing, 15, pp. 1459–1470.
GATES, D., KEEGAN, H.J., SCHLETER, J.C. and WEIDNER, V.R., 1965, Spectral properties of
plants. Applied Optics, 4, pp. 11–20.
GUYOT, G., BARET, F. and JACQUEMOND, S., 1992, Imaging spectroscopy for vegetation
studies. In Imaging Spectrometry: Fundamentals and prospective applications, F.
Toselli and J. Bodechtel (Eds) (Dordrecht: Kluwer), pp. 145–165.
HANSELMAN, D. and LITTLEFIELD, B., 2001, Mastering MATLAB 6: A comprehensive tutorial
and reference (Upper Saddle River, NJ: Prentice Hall).
HARE, E.W., MILLER, J.R., HOLLINGER, A.B., STURGEON, D.R., O’NEIL, N.T. and
WARD, T.V., 1986, Measurements of the vegetation reflectance red edge with an
airborne programmable imaging spectrometer. Fifth Thematic Conference on Remote
Sensing For Exploration Geology, Reno, Nevada (Ann Arbor, MI: Environmental
Institute of Michigan), pp. 657.
HEEGE, H.J. and REUSCH, S., 2002, Der Stickstoff und die Farbe des Getreides. InterScience,
27, pp. 8–10.
HEEGE, H.J. and REUSCH, S., 2003, Optical control of site specific nitrogen top dressing.
http://www.ilv.unikiel.de/reusch/nsensor.htm named: RTF-TEXT.ZIP.
520 G.V.G. Baranoski and J.G. Rokne
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13

HORLER, D., et al., 1983, The red edge of plant leaf reflectance. International Journal of
Remote Sensing, 4, pp. 273–288.
HOSGOOD, B., JACQUEMOND, S., ANDREOLI, G., VERDEBOUT, J., PEDRINI, G. and
SCHMUCK, G., 1995, Leaf Optical Properties Experiment 93. Technical Report
EUR 16095 EN, Joint Research Center, European Commission, Institute for Remote
Sensing Applications.
KRAFT, M., 1996, Messtechniken zur Erfassung der spektralen Reflexionssignatur von
Pflanzenbestanden. Bornimer Agrartechnische Berichte, 11, pp. 23–36.
MILLER, J.R., HARE, E.W. and WU, J., 1990, Quantitative characterisation of the vegetation
red edge reflectance. 1. An inverted Gaussian reflectance model. International Journal
of Remote Sensing, 11, pp. 1755–1773.
NEMANI, R.R., PIERCE, L.L., RUNNING, S.W. and BAND, L.E., 1993, Forest ecosystem
processes at the watershed scale: sensitivity to remotely-sensed leaf area index
estimates. International Journal of Remote Sensing, 14, pp. 2519–2534.
PIERCE, J., 2002, REDE 1.0 (Red Edge Detection Engine). http://www.cstars.ucdavis.edu.
PU, R., GONG, P., BIGING, G.S. and LARRIEU, M.R., 2003, Extraction of red edge opical
parameters from hyperion data for estimation of forest leaf area index. IEEE
Transactions on Geoscience and Remote Sensing, 41, pp. 916–921.
RAILYAN, V. and KOROBOV, R., 1993, Red edge structure of canopy reflectance spectra of
triticale. Remote Sensing of Environment, 46, pp. 173–182.
SCHLERF, M. and ATZBERGER, C., 2001, Imaging spectrometry and vegetation science. In
Imaging Spectrometry. Basic Principles and Prospective Applications, F. van der Meer
and S. de Jong (Eds) (Dordrecht: Kluwer), pp. 111–155.
VAN DER MEER, F. and DE JONG, S., 2001, Imaging Spectrometry. Basic principles and
prospective applications (Dordrecht: Kluwer).
WERNER, W. and ATZBERGER, C., 1996, Reflexionsspektren und Computer-Bitmaps zur
Erflassung und Quantifizierung von Chlorosen und Nekrosen an Blattern.
Verhandlungen der Gesellschaft fur Okologie, 27, pp. 341–348.
ZARCO-TEJADA, P. and MILLER, J.R., 1999, Land cover mapping at BOREAS using red edge
spectral parameters from CASI imagery. Journal of Geophysical Research, 104,
pp. 27 921–27 933.
ZARCO-TEJADA, P.J., MILLER, J.R., MOHAMMED, G.H., NOLAND, T.J. and SAMPSON, P.H.,
2002, Vegetation stress detection through chlorophyll a+b estimation and
fluorescence effects on hyperspectral imagery. Journal of Environmental Quality, 31,
pp. 1433–1441.
ZARCO-TEJADA, P.J., PUSHNIK, J.C., DOBROWSKI, S. and USTIN, S.L., 2003, Steady-state
chlorophyll a fluorescence detection from canopy derivative reflectance and double-
peak edge effects. Remote Sensing of Environment, 84, pp. 283–294.
Estimating red edge position 521
Dow
nloa
ded
by [
Uni
vers
ity o
f W
ater
loo]
at 1
2:50
03
Apr
il 20
13