A NUMERICAL ANALYSIS OF CONTACToden/Dr._Oden_Reprints/1984-003.a_numerical.pdfComp:uer_'f &...
12
Comp:uer_'f & StruaUft'l Vol. IK. No. S. pp. 899910. 1984 Printed in Grt~11 Br11 .. in A NUMERICAL ANALYSIS OF CONTACT AND LIMIT-POINT BEHAVIOR IN A CLASS OF PROBLEMS OF FINITE ELASTIC DEFORMATION 24-3 (KI4S 794~,1H4 S3,m + ,m Pergamon Pr~!>" Ltd. T, ENDO. j, T. ODE:-O.E. B. BECKERand T. MILLER Texas Institutc for Computational Mechanics. Department of Aerospace Engineering and Engincering Mechanics. The University of Texas at Austin. TX 78712. U.S.A. (Receive,! 28 February 1983: receiredfor publication 10 ,Hay 1983) Abstracl-Finitc clement methods for the analysis of bifurcations. limit-point behavior. and unilateral frictionless contact of elastic bodies undergoing I1nitedeformation are presented. Particular attention is given to the dcvelopment and application of Riks-type algorithms for the analysis of limit points and exterior penalty methods for handling the unilateral constraints, Applications focus on the problem of finite axisymmctric deformations. snap-through. and inflation of thick rubber spherical shells, .. • .. • ..: I. INTROOUCftON In many structural and machine parts. structural components composed of highly-defomlable elas- tomers are employed which may undergo very large deformalions under design loads. Examples of such components are valve seals. elastomeric bearing pads. pneumatic tires. shock and energy absorbers. rubber gaskets and machinc parts. CIC. Owing to the highly nonlinear behavior of such matcrials and the complex geometry or such strudural componenls. delailed analysis of lhcir structural behavior generally re- quires thc use oflinilc clcmcnt mcthods which involvc elaboratc nonlincar equation solvers. In this paper. mixcd and penalty finite clement models of a general class of two-dimensional elas- tostatics problems in finite elasticity are analyzed using various solution strategies. some being based on ideas advanced by Riks [I] and others on the concept of exterior penalty approximations. A com- parative study of several Riks-type or incremental- loading-type methods for these problems is given together with numerical results obtained by applying the methods to several representative examples. In addition. a special class of contact problems in finite elasticity is analyzed. As a representative example. the procedures developed here are applied to the problem of contact of a rubber spherical shell with a rigidfrictionless foundation. Finite element methods for the analysis of finite deformations of elastic solids were first developed independently by Becker[2] and Oden[3] and Oden and Sato[4] and a summary of much of this early work is given in the book of Oden [5]. More recently. a comprehensive study of finite element methods for problems of this type was contributed by Aly[6] and an extension of this work to problems involving limit points and bifurcations was undertaken by Miller[7]. It is well known that many of the major general- purpose nonlinear structural analysis codes in use do not adequately cope with bifurcation points. limit points and contact conditions. or, in fact. finite elastic deformations of incompressible elastic bodies. The classical method of incremental loading is typically employed because lhe user is often interested in obtaining a family of solutions for a given load 899 history, Howevcr. the standard incremental loading method may behave poorly in the neighborhood of limit points and bifurcations points of the solution. In 1970. and then in more elaborate papers in 1972 and 1979. Riks[l. 8.9] suggested new methods for the numerical solutions of bifurcation and limit-point problems with II degrees of freedom. He added a constraint equation fixing the length or the in- crem~ntal load step in load/deflection space. Basic- ally. lhe method involves the introduction of a gener- alized arc-length in 1/ + I-dimensional space which can be used as a parameter in lieu of the applied load. This allows the calculation of negative load in- crements ncar limit points. The idea was also em- ployed independently by Wempner[lO] and in some circles the ideas are referred to as "Riks-Wempner" methods. Generalizations of these methods were also studied later by Keller[11. 12]. In 1981. Crisfield [I 3] modified Riks method by using a "circular" con- straint. whereas Riks employs a correction in a hyperplane normal to the tangential solution, In addition. Padovan [14] proposed elliptically con- strained incremental algorithms based on somewhat different solution strategies. We shall describe some of these methods in more detail later in this study. The objectives of the present study is the devel- opment of new algorithms based on the Riks ideas for solving buckling and contact problems of large strains and large displacements of nonlinear isotopic hyperelastic rubber-like materials. The general meth- ods are applied to the problem of buckling, inflation. and unilateral contact of a thick rubber spherical cap subjected to external pressure. 2. PREI.I,~lINARIES AND NOTATIONS We shall review here the formulation of the equa- tions governing equilibrium of an isotropic incom- pressible elastic solid undergoing finite deformations due to the action of applied body forces and surface tractions. Standard notations are employed. We begin by considering the motion of an elastic body relative to a reference configuration. We estab- lish a fixed. spatial. cartesian coordinate system Xi and label material particles of the body according to the following convention: a material particle X is
Transcript of A NUMERICAL ANALYSIS OF CONTACToden/Dr._Oden_Reprints/1984-003.a_numerical.pdfComp:uer_'f &...

Comp:uer_'f & StruaUft'l Vol. IK. No. S. pp. 899910. 1984Printed in Grt~11 Br11.. in
A NUMERICAL ANALYSIS OF CONTACTAND LIMIT-POINT BEHAVIOR IN A
CLASS OF PROBLEMS OF FINITEELASTIC DEFORMATION
24-3(KI4S 794~,1H4 S3,m + ,m
Pergamon Pr~!>" Ltd.
T, ENDO. j, T. ODE:-O.E. B. BECKERand T. MILLERTexas Institutc for Computational Mechanics. Department of Aerospace Engineering and Engincering
Mechanics. The University of Texas at Austin. TX 78712. U.S.A.
(Receive,! 28 February 1983: receiredfor publication 10 ,Hay 1983)
Abstracl-Finitc clement methods for the analysis of bifurcations. limit-point behavior. and unilateralfrictionless contact of elastic bodies undergoing I1nitedeformation are presented. Particular attention isgiven to the dcvelopment and application of Riks-type algorithms for the analysis of limit points andexterior penalty methods for handling the unilateral constraints, Applications focus on the problem offinite axisymmctric deformations. snap-through. and inflation of thick rubber spherical shells,
..•
..•
..:
I. INTROOUCftONIn many structural and machine parts. structuralcomponents composed of highly-defomlable elas-tomers are employed which may undergo very largedeformalions under design loads. Examples of suchcomponents are valve seals. elastomeric bearing pads.pneumatic tires. shock and energy absorbers. rubbergaskets and machinc parts. CIC. Owing to the highlynonlinear behavior of such matcrials and the complexgeometry or such strudural componenls. delailedanalysis of lhcir structural behavior generally re-quires thc use oflinilc clcmcnt mcthods which involvcelaboratc nonlincar equation solvers.
In this paper. mixcd and penalty finite clementmodels of a general class of two-dimensional elas-tostatics problems in finite elasticity are analyzedusing various solution strategies. some being basedon ideas advanced by Riks [I] and others on theconcept of exterior penalty approximations. A com-parative study of several Riks-type or incremental-loading-type methods for these problems is giventogether with numerical results obtained by applyingthe methods to several representative examples. Inaddition. a special class of contact problems in finiteelasticity is analyzed. As a representative example.the procedures developed here are applied to theproblem of contact of a rubber spherical shell with arigidfrictionless foundation.
Finite element methods for the analysis of finitedeformations of elastic solids were first developedindependently by Becker[2] and Oden[3] and Odenand Sato[4] and a summary of much of this earlywork is given in the book of Oden [5]. More recently.a comprehensive study of finite element methods forproblems of this type was contributed by Aly[6] andan extension of this work to problems involving limitpoints and bifurcations was undertaken by Miller[7].
It is well known that many of the major general-purpose nonlinear structural analysis codes in use donot adequately cope with bifurcation points. limitpoints and contact conditions. or, in fact. finite elasticdeformations of incompressible elastic bodies. Theclassical method of incremental loading is typicallyemployed because lhe user is often interested inobtaining a family of solutions for a given load
899
history, Howevcr. the standard incremental loadingmethod may behave poorly in the neighborhood oflimit points and bifurcations points of the solution.
In 1970. and then in more elaborate papers in 1972and 1979. Riks[l. 8.9] suggested new methods for thenumerical solutions of bifurcation and limit-pointproblems with II degrees of freedom. He added aconstraint equation fixing the length or the in-crem~ntal load step in load/deflection space. Basic-ally. lhe method involves the introduction of a gener-alized arc-length in 1/ + I-dimensional space whichcan be used as a parameter in lieu of the applied load.This allows the calculation of negative load in-crements ncar limit points. The idea was also em-ployed independently by Wempner[lO] and in somecircles the ideas are referred to as "Riks-Wempner"methods. Generalizations of these methods were alsostudied later by Keller[11. 12]. In 1981. Crisfield [I 3]modified Riks method by using a "circular" con-straint. whereas Riks employs a correction in ahyperplane normal to the tangential solution, Inaddition. Padovan [14] proposed elliptically con-strained incremental algorithms based on somewhatdifferent solution strategies. We shall describe someof these methods in more detail later in this study.
The objectives of the present study is the devel-opment of new algorithms based on the Riks ideas forsolving buckling and contact problems of largestrains and large displacements of nonlinear isotopichyperelastic rubber-like materials. The general meth-ods are applied to the problem of buckling, inflation.and unilateral contact of a thick rubber spherical capsubjected to external pressure.
2. PREI.I,~lINARIES AND NOTATIONS
We shall review here the formulation of the equa-tions governing equilibrium of an isotropic incom-pressible elastic solid undergoing finite deformationsdue to the action of applied body forces and surfacetractions. Standard notations are employed.
We begin by considering the motion of an elasticbody relative to a reference configuration. We estab-lish a fixed. spatial. cartesian coordinate system Xiand label material particles of the body according tothe following convention: a material particle X is

900 T. ESDO el al.
assigned particle labels X = (X,. Xl' Xl) (materialcoordinates) which have values coincident with thecoordinates Xi of the position of X relative to the fixedspatial frame of reference. The motion of thc bodycarried each particle X to a position xlIR3 whichdefines the "current" configuration of the body. andwe write Xi = ;dXI- X2• X3). where I is a smoothbijective function. The displacement u of particle X isthen the vector with components11" = II,{X) = x.{X) - X;. i = I. 2. 3. with X = (XI' X2•
X3)
We also introduce the Cauchy-Green deformationtensor C defined by
Thus. the space
v = {v = (v]. V2' t'3)(X)IIU(v)l: lIn W(v)
dvol < 00. v = 0 on on,} (2,7)
is an example of a space of admissiblc displacementsfor the problem. the precise structure of which isdetermined by the form of the stored energy functionW. In the case of incompressible materials. we mustimpose the additional constraint of incompressibility.Assuming. for example. that 13: V ~L I(n). we haveas the constraint set K e V.
K = {VEV 1/3(v) = I a.e. in n} (2.8)
and its principal invariants.
where tr(') denotes the trace of a tensor (tr C = Cit),Let n dcnote the open interior of the set of
particles comprising the body under considerationand let n= nu an denote its closure (ne 1R3 isassumed to be bounded). The boundary on consistsof two parts: an, on which displacements are pre-scribed and an2 on which tractions are prescribed(an = on,Uo(1). In the case of "dead" loading. wedenote by r the body rorce per unit volume in thcreference configuration and by t the surrace tractionper unit of surracc area in the reference configuration,The boundary condition on ani is of the formu = ~1'11o being given as part of the data.
In addition. we assume that the body is homoge-ncous. isotropic. and hyperelastic and that. therefore.therc exists a potential function IV. representing thestored (or strain) energy pcr unit volume in thcreference configuration. which can be expressed asfunction of the invariants I,. 12, and I):
The virtual work of the external forces (C.t) is. inthis case. given by the functional
f(v): r C'Vdvo+f t·Vdso.VEK (2.9)In <'Ill
whereas the so-called internal virtual work is given bya variation au of U taken over any admissibledisplacement '·EK.
Variational principlesWith the above preliminaries now established. we
proceed to the establishment of variational formu-lations of the equilibrium cquations of finite elas-ticity. We are interested in the case of incompressiblematerials. and we shall effectively employ the prin-ciple of virtual work. We shall first relax the con-straint Il(u) =) by using the method of Lagrangemultipliers. In particular. if I) belongs a functionspace Q e L I(n). we introduce an augmented energyfunctional
(2.10)
...
..
which implies 13 = I. Then W is determined by afunction of only the first two invariants.
We shall assume that W is at least twice differentiablcwith respect to each of the Ii' If the material isincompressible. then all motions of the body aresubject to the kinematical constraint
,.(2.11 )
(2,12)
gM)) =fi-I.gil)) = I) - I.
g3(l3) = -lnfi. etc.
if wc choose any function of the type
where ),lQ' as a real-valued function and g(lJ) is a .function defining the incompressibility constraint.det F = I a,e. in n, There is not a unique choice forg: indeed
(2.41
(2,3)
det F = I
(2.6)
(2.51
The total strain energy U of thc body is defined by
U= in Wdt'o
The Piola-Kirchhoff stress is given by,
oW oW OJ, .og 01)Slj=-=-'--,"-'-
, OlliJ 01, OIlIJ aI) OlliJ
oW aI, 1013=-;--'--p--01, iJu;j 20lliJ
(2.13)
where dvo is an element of volume in the referenceconfiguration. Since W is a function of invariants ofF",;F"'j = (0",; + 1I",)(b.!i + 11m). we regard U as a func-tional or kinematically pos5,ible displacement fields ".
where p is the hydrostatic pressure.
ogp = 2;. 0/
3' (2.14)

Problems of finite clastic deformation 901
(2.15)
The pressure p is. within an arbitrary function. theLangrange multiplier associated with the constraintg(l) = O.
The equilibrium problem of finite incompressibleelasticity is then characterized by the virtual workprinciple and the incompressibility constraint. which.in turn. are characterized by the following nonlinearboundary-value problem:
Find a displacement field u such thatu - iiE V and a hydrostatic pressurep ~ Q' such that
i oW(u) i o/)(u)-viJdvo -vlJdvo=/(v).o OliiJ 0' OlliJ
VVEV
Lqg(l) dvo = 0, VqEQ'
where ii is any vector in V such that ii 1m, = 110·
Exterior penaltyWe can also formulate a boundary-value problem
for almost incompressible materials by using anexterior penalty method, This amounts to adding tothe total strain energy a penalty functional of theform
(2.16)
where ( is a positive parameter and h is a sufficientlysmooth function such that
incompressible body is then given by
(2.22)
and one expects p, -+p in some sense. as £ -+0.
3. A CLASS OF CONTACf PROBLEt\L5
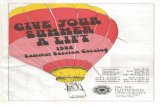
When the motion of a deformable body is con-strained by the presence of a rigid or deformableobstacle. an additional set of highly nonlinear contactconditions must be added to the fomlUlations. In thepresent sections, we consider a restricted class ofcontact problems in which the obstacle is character-ized as a flat. frictionless. rigid half space fixed abovea hyperelastic body undergoing finite deformations(see Fig, I). Our analysis employs the contact condi-tions developed by Kikuchi and Oden[15] for suchproblems.
We are interested in the deformation of the bodybrought about due to its motion from its referenceconfiguration to another configuration at which someportion of the material surface of the body comes incontact with a foundation .'F. as indicated in Fig. 1.
To simplify matters. suppose that the materialsurface r, of the body n which contains the portionof the total surface r of the body which comes incontact with S' in the current configuration. isdefined by the partide for which
(3.1 )
where l1> is assumed to be smooth runction. Inaddition. assume that the surrace S of the foundationis simply defined by the equation
,.
h (I) > 0 if I) #- I
h(lJ) = 0 iffl = J.
Possible choices of h considered here are
(2.17)
(2.18)
(3.2)
where ao is constant. Then. if(X}. X2• XJ) is a particleof r,. its displacement must satisfy
II,[X,. Xl' <1>(X,. Xl») = X,{X,. X2• <1>(X,. X2») - X,.
i = 1,2.3
Still others are possible,We then consider the nonlinear boundary-value
problem:
Find u,E V such that u, - iiE V and
i oW(u,). . IiOh(l.).OIlU,).----;-- V'J dt,o +- ----:;----,,-1 iJ dvo
{J VII(J £ 0 all Vlli,i
=I(v) , 'liVE V. (2.19)
If
where
then the above penalty formulation corresponds to acompressible (or "nearly incompressible") material.An approximation of the hydrostatic pressure p in an
c....s Vol. '8. No. 5-J
S(fl.-.t surface)
Fig. I. Constraint on the motion of a deformable body bya rigid foundation.

902 T. ENDO et aJ.
and then
More compactly. if we define the function F by
then the contact constraint assumes the form
particular formulation employs the methods inAly[6]. It suffices to merely summarize the basicincremental stiffness arrays, Let {u/'};= 1 denote theglobal degrees of freedom for the displacement ap-proximation and {p.lH~I those for pressurc approxi-mations, Then the discrete equilibrium equations forthe Lagrange multiplier and penalty methods are ofthe following forms:
Thc virtual work associated with this penalty term is
[F(u)L = sup{O. F(u)}. (3.6)
I r 'U6 = 2,5Jr, [F(u)+J- dso
where ,5 is a positive parameter and [F(u)J+ is
!.
(4.2)
(4.3)
i aU-' iJl,(Uh)Kp,(Uh)= -'-'PPJdvo
001, iJu'J
i oI3(uh)C;p,( uh) = l1>c;-- 'PPJ dvo
o uUiJ
I/li = r R¥II dl'o + f t,'PII d.foIn i'lll
Biuh) = Ll1>µg(l3(Uh)) dl'o
Uhi.j = tp /Il'~Ph = l1>;p.l.
K/I,(uh) - C;/I,(Uh)P.l ::I/I,. i = I.2. 3}B,.(uh) - 0
(2) Pelltllty
where
(I) Lagrange multiplier(3.4)
(3.7)
F$',O,
We refer to the inequality (3.4) as the kinematicalcontact condition for finite displacements of a bodyconstrained by a fixed rigid foundation.
For embedding a contact condition into a vari-ational form. we introduce a penalty method. Torelax the contact constraint. we add to the energy. apenalty fnunctional of the form
Thercforc. to amcnd the variational boundary-valueproblems (2.15) and (2.19) so as to account for thecontact condition (J.4) hy means of a penaltymethod. we nced only add ,5Ud of (3.7) to left side ofthesc equations.
where
(4.4)
where n is a unit outward normal to the element dsof surface area and v is an admissible displacement.
In solution schemes which employ an incrementaltechnique. it is advantageous to have derived the
In either case. we increment these nonlinear equi-librium equations to obtain a sequence of problemsin which the load or. as will be seen in later sections.an abstract arc Icngth are used as parameters. Fulldetails of these various solution procedures are givenin Section 4.
It should be noted that in many cases the assump-tion of dead loading is invalid and the virtual workof the external forces may also depend upon thedeformation. For example. if a prcssurc of intensityp pcr unit of deformed surface area is applied on thematerial surface iJil2• then the virtual work producedis of the form,
(4.5)
(4.6)
where u;" is the value of Uhi at node n of element e. 1''''is mth degree-of-freedom corresponding to the pres-sure approximalion and mayor may not represent avalue of Ph at a node. 'P,: and l1>"," are correspondingelement shape functions. and the repeated indices aresummed.
We shall use 8-node isoparametric elements (18)and/or 9-node biquadratic elements (Q2) for con-structing an approximation Uh of u and discontinuouslinear approximations (PI) for approximating Ph orcontinuous bilinear clements (QI) for Ph depending onwhether we use the mixed or penalty formulations,
Full details of the finite element formulation areomitted here sincc they are standard and can befound. for example. in the book of Oden[5], Our
4. FINITE EI.EMENT APPROXIMATIONS
Finite e1emcnt approximations of problems (2,15)and (2.19). (with or without the addition of thepenalty term (jUd of (3.7» are obtained in the usualway (see [5]). We partition il into E elements overwhich piecewise polynomial approximations of thedisplacement field u and the pressure field I' areconstructed. Over a typical element. these assume theforms

Problems of finite elastic deformation 903
incremental load stiffness matrix for handlingchanges in loads (see [5]), For our purpose. it sufficesto note that for the case of axisymmetric -defor-mations of a finite element under pressure loading.this load stiffness assumes the form. (see[6])
Unfortunately. this operation is not legitimate be-cause the function [F(u)] .. is not dilTerentiable atflu) = o.
To overcome this difficulty. we replace [F(u)]+ bya regularized constraint function F9(u) that can be
In solution schemes which employ an incrementaltechnique. it is advantageous to have derived theineremcntal "contact stiffness" matrix. For our pur-poses. it suffices to note that for the case ofaxisym-metric deformation. this stiffness assumes the follow-ing forlll if F 2 /I
made arbitrarily close to [F(u)]+ by choosing the realparameter 0 > 0 sufficiently small. For example,
\
[F(u))+ for IF(u)12 0
F;j(u) = I I () (4.9)- F(U)2 + -F(u) + - for IF(u)/ < e.48 2 4
where " is a surface coordinate embedded on thesurface (aU,) on which the pressure acts. (See Fig. 2.):1/1, are shape functions defined by II, = r.;:. I1/1~li/ andII, = r.;,= 11/1,11/: and 1 ~s the node number of the edgeof the boundary an2• where the pressure acts,(Namely the node A and B in Fig. 3),
Sign has the following property: Sign = 0 if the (r)or (z) component of displacement is specified at thenode I. Otherwise. Sign = I if the node is the startingpoint of the boundary integral. (The point A in Fig.3.) Sign = - I if the node is the end point of theboundary integral. (The point A in Fig. 3.) R. Z arethe current position coordinates in terms of thecylindrical coordinate system. Note that if the scalar"Sign" is zero. the resulting load stillness matrix willbe symmetric.
The calculation of terms in this matrix ....;11 proveto be important in some of the examples considerlater.
Then we use. instead of {~6}'
{~/} = HLO~~U)l\u'v dsa}. (4.10)
('omurt conditio/ls [0 0 ]Upon the addition of the virtual work teml 6U6 to 9
account ror the contact condition. we would expect {~6Iil = () ~ r R )(02)2 (OR)2 . . (4.1Ia)that we would add to the incremental stiffness matri- t5 Jr o( + 0, I/I,IjJJd(ces a new tangent stiffness matrix of the type "
(4.8)
if -() < F < (}
o ()
where , is again a coordinate embedded on thecontact surface.
where x = {XI' X2' ...• XN} T is the vector of unknownnodal displacements and hydrostatic pressures;
(5, I)
(4.llc)
(4, lIb)
f(x.p) = 0
If. I I}o - -(<I> + II - 00) + -f1 r, 20 : 2
(02)2 (OR)2X R - + - I/I,ljJd'0, 0, J
if FSO
5. INCREMEl'oT AI. SCHDIES
The system of nonlinear equations resulting fromfinitc element approximations of the equilibriumequations of finite elasticity. in the case of propor-tional loading. are of the general form.
{K 9\ -~d J'J-
Fig, 2. Area element in the finite element ('~. 8) eoordinates,

904 T. ENDO et al.
using this procedure. To ovcrcome this. two ap-proaches are possible:
(I) Use a higher-order scheme for integrating thesystem.
(2) Use a corrector scheme (such as the Picard orNewton-Raphson method) to correct the approxi-mation x' after each iteration,We shall use method (2) with the Newton-Raphsonmethod as the corrector. This is possible because. inaddition to (5.3). we have the equilibrium conditions
ExtensionsThis incremental-loading/Newton-Raph30n
scheme has proved to be very effective in problems inwhich no limit points occur. Unfortunately. themethod does not apply directly to problems in whichlimit-point behavior can occur since there we musthave the capability for allowing negative load in-crements. For this latter class of problems. we turn toa powerful family of methods. some of which are stillbased on the ODE-system (5.2). but which take fulladvantage of the arbitrariness in lhe choicc of theparameter s.
There is one additional choice in parameters thatshould be mentioned at this point: if I' is regarded asa fixed load applied to the body. then we may writefor thc instantaneous load pes) corresponding to apoint .\' on the equilibrium path.
".
(5.4)
(5.5)p (s) = I' (5 )1'. se[O. S]
Fig. 3, Boundary points on a material surface ii~ subjected10 external pressure.
p = an applied load parameter: and f = (t;.ii ..... f,,.y is a force vector of N nonlinear functionssuch that/; = 0 is thc ith equilibrium equation for thediscrete model.
The so-called continuation or incremelltal loadingmethods for solving a system such as (5.1) effectivelyconvert (5.1) inlo a system or ordinary differentialcquations by assuming that x and possibly p are givenas differentiablc functions of a real "path" parameter,v'
x = x(s), p = pes). se(O. Sj.
The pairs (x(s). pes»~ then represent an equilibriumpath or trajectory in an N + I-dimensional space.The. if f is diffcrcntiable with respect to each argu-ment. we must have df = 0 on any equilibrium pathand. hencc.
where pes) is a load parameter. Minor distinctionsbetween pes). P. and p(s) arc sometimes made todistinguish onc variant of these continuation methodsfrom another.
All of the methods that we wish to consider providefor the calculation of increments in p or I' by appen-ding to (5.1) an N + 1st equation of the type
which. for example. could represent an equation ofarc length in IRN+ ':
± iJj,{x. P).'i:J+ af~;.1') p = O. i= 1.2 ..... N
J= I aXJ p
where
(5,2)
N(x. p.s) = () (5.6)
,
We call the N + Ist equation the constraint equation.A very powerful method for tracing the equi-
librium path in IRN+' was proposed by Riks[8] andindependently by Wempner[IO], The idea is 10 solvethe full system of equations.
. dx. dpx=- P =-. ds' ds'
The method I~lincremental loading is a scheme forsolving (5.1) by
(I) Integrating (5.2) numerically using Euler'smethod.
(2) Choosing the load p as the parameter ratherthan an abstract arc length s.In this case, (5.2) yields the algorithm
l(x', p')(x'+ I - x') + g(x'.p')!!p' = 0 (5.3) where
(5.7)
{f(x(s), p(s» } = 0 (5.8)
F(X(s). s) == N(x(.\'). pes). s)
by. e.g. the Newton-Raphson method.Now the same argument given earlier can be
applied: if F is differentiable with respect to eachargument. we must have dF = ()on any equilibrium
where lex'. p') = the jacobian evaluated at the rlhload increment = {oj,{x'. p')/oxJ}: g(x'. prj = a loadcorrection = {O};(x'.p')/op}: !!p' = a prescribed loadincrement: x' = value of x after Tth load increment:and p, = r.,Ap'.
Unfortunately. considerable error can accumulate
X(s) = {x(s). P (5 )} T (5.9)

path and. hence.
Problems of finite elastic deformation
or
905
Nf iJF,{X. s) .\j + iJF,(X. s) = O.j= 1 O~ OS
i = I. 2. " " .N. N + I
(5.10)N ==~x·~X+(~p)2_(~S)2=O.
etc, These equations yield the algorithm
(5.19)
where
(5.11)
N == x(so}-[x(s) - x(so)] + P (so)[p (.I')
- p(so)] - ~s = 0 (5,20)
and
Note that we now have N + I unknowns X andN + I eqns (5.10). This leads to equations defining anonlincar system of ordinary differential equations inX of the form
wherc J(X'. s') = the jacobian evaluated at the rthload increment = {iJf~{X'. s')/iJ~}: H(X'. s') ={oF,(X'.s')/os}: X'=value of X aftcr rth path in-crement: s' = t~s' where ~s' is a prescribed pathincrement: and X' = unknown value of X after rthpath incremcnt.
In tenns of thc notation introduced earlier. j andH arc the form
J(X', s')X' + H(X'. s') = 0
j(X.s) =
[
J(x.(s).p(s)) g(X(S).P(S))]ilN(x(s)). p(s). s) oN(x(s). p(s). s)
(Ix fJp
f'I(X. s) = {n. iJN(x(s). p(s). S)}Tas .
(5.12)
(5.13)
(5.14)
N == [x(s) - x(so)]' [X (.I' ) - x(so)] + [p (.I')
- p(so)f - (~s): = 0 (5.21)
where So denotes a particular point on equilibriumpath. x(so). (so) is the known solution of equilibriumequations (5.8) at .I' = So. and ~s is a prescribed pathincrement. Equation (5.20) was introduced by Riks[l)and Kellcr[I2I and (5.21) is close to the followingform introduced by Crisfield (I3]:
N == [x(s) - x(so»)' [x(s) - x(so)) + [P(s)
- p(so))'p· P - (~S)2 = O. (5.22)
Here P is a prescribed load vector,Hereafter. we shall call eqn (5,20) the tangent plane
constraint. and the eqn (5.21) or (5,22) the sphericalconstrail/t. In particular. Crisfield neglected the sec-ond tcrm of LHS of (5.22) ror simplicity when (5.22)was implemented, and used instead.
N :: [x(s) - x(so»)' [x(s) - x(so») - (L\s)2 = O. (5.23)
As another example. Padovan(l4] introduced anelliptical constraint method with a constraint equa-tion of the form
By using Euler's method. the solution of r + Ithincrcmcnt is
(5.15)
N ==JI[X(S) - x(so»)'[x(s) - x(so»)
+[p(s) - p(soW~p·~p - ~p,~p = 0(5.24)
where X' is the valuc of X after rth path increment:X' is the valuc of X after rth path increment andX' = x'/llx'lI where X' is obtained by (5.12): and,'1.1" t 1 is a prescribed path increment. For correctingerrors inhcrent in (5.15). the Newton-Raphsonmethod can be used because we also have at ourdisposal the equilibrium conditions
N==X'~x+pdp-~S=O (5.18)
This form. however. is not the most practical one touse. and we can consider various approximations of(5,17) such as
C01lStrailll equationsThere are several choices of the constraint equation
N(x. p. s). (sec[ll]). However. the most natural equa-tion is to use for s a form of arc length in IRN+I:
F(X(s). s) = n at .1"+ 1.
N::x·x+p'-l =0.
(5.16)
(5,17)
where ~P is a prescribed load increment: and µ is aprescribed parameter. However. if we employ (5.24).then the parameters no longer represents arc Icngth.Padovan also suggested an adaptivc scheme based onbounding the parameter J1.
Since we are interested in the equation N(x. p. s)which represents an arc length in IRs+ 1. the tangentplanc constraint and the spherical constraint are to beused in subsequent calculations.
6. SOLUTION ALGORITH:\IS
Sincc the jacobian matrix J(X. s) in (5.12) is notsymmetric. special techniques are needed to handleunsymmetric matrices, In this section. three types ofsolution methods are discussed.
Miller's methodMiller [1982] has used a method that involves a
modification of a frontal solution routine. In thismethod. the jacobian matrix J(X . .1') is factored di-rectly without destroying the symmetry of the matrix.In particular. the tangent plane constraints are used,

906 T. ENDO et al.
(6.10)
so that in (5,13) we have
aNop = peso)
(ii) Set dp and dx by
(-C'w Idp=-(6.1) d-c'\'
dx=w-dp\'.
(6.2) Since Keller also used the tangent plane constraint.we have
The operation count for this method is one LV-factorization of an (N + I) x (N + I) matrix and onebacksolve with the factorized matrix. One extra stor-age array «N + I) in length) is required for X( = x. p)as compared to an ordinary Newton-Raphsonmethod.
Keller's methodThe linear equation solver for the system of equa-
tions is often regarded as a "black box". and onetakes the point of view that is cannot be modified.Keller [ II) applied a "Bordering Algorithm" whichdoes not involve any change of the solver.
Consider the "combined" jacobian matrix.
The operational count for this method is oneLV -factorization of N x N matrix. two backsolveswith factored matrix and three N-dimensional innerproducts. For retaining x and p. one array storage isalso required.
(6.11)
(6.12)Av = h},Aw=q
(ii) Set dp and dx by
CrisfiekTs methodAs in Keller's method. Crisfield [I3) avoids the
change of the solver definition. The main differenceis that the constraint equation used is the sphericalconstraint. (5.23). However. since (5.23) does notinclude a load parameter term. it does not representarc length precisely, We can modify Crisfield'smethod slightly by using (5,21). Here the same no-tations as in (6.4)--{6.7) are used,
Crisfield Algorithm (modified):(i) Solve \' and w by
(6,3)
(6.4)
aN = _I.as
j = [A bJcT d
and in (5.14) we have
where
ox
where dp is the solution of the following equation.
A E J(x. p)
bE g(x. p)
oN(x. p . .I')c= (6.5)
dx = w - dp\' (6,13)
(6.14)
,.
(6.16)
(6,17)
here
The scalar quadratic equation (6.14) will providetwo roots dpi and dp2' Hence. to avoid backing upthe original equilibrium path. dp is chosen by thefollowing method:
(i) Check two angles VI and V2 such that
VI = LlX~, 1.1' Llx,,'+ Llp~ + 1.ILlP,:}0, = LlX;,+ 1.2' LlX,,'+ Llp;, + I.2Llp;
where Llx,,' is the solution of r th increment and 11thiteration; LlX;," 1.1 = LlX,,'+ dx, = LlX,,'+ w - dpi \.;and LlX;,+ u = Llx,,' + dX2= Ax,,' + w - dp2'"
(ii) 'Pick a positive angle unless both angles arepositive. in which case the appropriate root is theclosest to the linear solution
(6.6)
(6.7)
(6.8)
(6.9)
q_= -f}y =-N.
N(x. p. s)dE ap
(i) Solve \' and w by
A\' = b}Aw=q
Llx~+ I = LlX; + dx }LlP~+1 = LlPn' + dp
where Llx,,'. Llp; is the rth increment. nth iteratesolution. The bordering algorithm is then defined asfollows:
and
The Newton-Raphson method yields

Problems of finite elastic deformation 907
where c1• and C2 are material constants. We shallconsider only axisymmetric deformation of the shell.
The finite element mesh consists of eight nine-nodebiquadratic elements for the displacement approxi-mation and discontinuous piecewise linear pressureapproximations. This is the so-called Q2/ PI element.which was shown to be numerically stable and toconverge at an optimal rate by Oden andJacquotte[16] for linear incompressible flow prob-lems. We shall choose for the material constants,
(i) CI = 80 Ib/in'. C2 = 4lb/in2 (element no. 1-7).(ii) ('I = 80 lb/in2. C2 = 20Ib/in' (clement no. 8),
The choice (ii) is made to limit the flexibility of edgeelements so as to simulate a hinged support. Sinceelement 8 has a singularity at the support. thiselement deforms excessively at the snap-throughpoint and during inflation. This led to physicallyunreasonable deformations. These numericaldifficulties were overcome by stiffening thc supportelement as indicated in (ii) above.
In mixed models. the term added to the potentialenergy functional is J.(fi - I), The pressure wasmodelled by nonconforming (linear discontinuous)basis functions. Throughout we use nine node ele-ment and 3 x 3 point Gaussian integration rule for allthc terms. For the model shown. there are 102displacement degrces-or-freedom. 24 pressuredegrees-or-freedom. and 5 kinematical constraints.
Thc computed trajectory or a node at the apex ofthe shell during the load history is shown in Fig. 5.These results wcre obtained using the spherical con-straint (5.21) or Crisfield's method. We observe thatafter "snapping-through," the shell continucs to de-form with increasing pressure until it inflates as aballoon. There is another limit point in the equi-librium path during this inflation phase of the defor-mation. This latter "instability in tension" is de-pendent upon the relative values of the materialconstraints CI and c, and is well known (see.e.g. [17. 18)), Computcd vertical deflection histories oftwo nodes during thc early "snap-through" phase of
(6,19)
(6,18)Llx '= OJ"Llp,,' = 0Lls = I
dXI = W-dplv
dX2= W - dp,v.
8, = dx)' LlX< + dPILlP<}82= dX2·Llxn + dP2LlPn
7. NUMERICAL EXPERIMENTS
!.ill/it point problemsTo test the algorithms and mcthods discussed
carlier. we now consider the highly nonlinear prob-lem of snap-through buckling and inflation of a thickrubber spherical cap, representing possibly an elas-tomcric seal undcr high external pressure. Consider.then. a thick hyperclastic spherical shell constructedof Mooney matcrial and subjected to a uniformextcrnal pressure p on its exterior surface, The geom-etry of the shell and a finite element modcl consistingor nine node quadrilateral elements of revolution areshown in Fig. 4. The form of the strain cnergy
Then pick dpi such that OJ is positive, Crisfieldchecked the sign of det A instead of checking the signof 01 and O2 when dpi is decided. This method will failif a bifurcation point is enountercd. but the methodof checking 81 and B, is still applicable if Lls is not toolarge,
The operational count for this method is oneLV -factorization of N x N matrix, two backsolveswith factored matrix and six N-dimensional innerproducts. For retaining Llx,: and Llp.:. one arraystorage is required.
A summary of some of the features of thesemethods is given in Tablc 1
where
and
For calculating x and p. thc procedure function for such an incomprcssible material is(6.l2H6.15) can be applied by setting
Table I. Comparison of storage and time requirements for three methods
Miller Keller Crisficld
Storage(additionalto classical one array one array onc arrayN-R method) Full fod: for X for dX.:
two array two arrayfor for
Scateh - l' and w l' and w--
LU-factori· N+lxN+1 NxN NxNcation
Time Innerproduct - threc SIX

908
!:l....nt no. 11.. 1b
T. ENLJO et al.
P.pressure Ib/1nZ
R:l6 in'1'. 1 ina= l-b. 6.5·e·3O·
Fig. 4. Gcometry and the I1nile clement grid.
20 30
the response are shown in Fig. 6. The computedprofiles of the shell at various pressures are shown inFig. 7 and 8.
These numerical results were recomputed usingeach of the three solvers discussed in the prccedingsection. As a comparison of these methods. the totaltime required for three iterations and onc calculationof X was examined. Most of the computing effort wasspent on the LV -factorizations. It was found thatcomputing times for all three methods was essentiallythe same. with Miller's method showing a slightlysuperior speed in this example. Further calculationsshowed. however. that there was considerabledifference in convergence characteristics betweentangent-plane constraint of the Miller and Kellermethods and the spherical constraint method ofCrisfield. Indeed. at p = 0.723. with 6.s = 100,Crisfield's method converged in 10 iterations whereasno convergence of the Miller-Keller method wasobserved.
50
40
30
_ 20N
!:-:!:L 10
10
local maxl~
I ---- ....
10C_'11 1lI1nimllf."
o
Contact problemWe next consider a thick rubber spherical cap
subjected to internal pressure. the motion of which isconstrained by the presence of a rigid flat surfacelocated above the shell and normal to the axis of
-10
U [!noh)
Fig, 5. Solution curve for external pressure loading,

Problems of I1nite elastic deformation 909
p - '5,2
d - I inch
p • Ptt'IHlure
P - 11.7
//////////
I~
Fig. 9. Initial geometry for contact problem.
I~
Palt1. 7lt9
P.li1. 764
Fig. 10, Computed geometry changes for contact problem.
p=lt1.880
p. 1.591
p. 1.031
Pt: o.
Fig. 8. Computed deformed shapcs for various externalpressures.
-0.5
~b/ln~p. o.
P. 0.527
U liDch)
Fig. 6, Solution curve around snap-through behavior.
2.0
1.5
~...1.01.
lL
0.5
0.0
Acknoll'ledgemelll-Support of this work by NASA undergrant NAG 3-329 is gratefully acknowledged.
Fig. 7. Geometry changes during snap-through behavior.
revolution. Material properties. initial geometry andthe finite element model are the same as those usedpreviously, but in this case the pressure acts on theinternal surface of the shell (see Fig. 9), The founda-tion is located one inch above the top of the rubbercap.
To obtain the solution of the contact problem ofspherical cap subjected to internal pressure.Crisfield's method is used with () = 10-4 and0= 10-1°. and Simpson's rule is applied for calcu-lating a penalty term of contact condition, The valueof b selected agrees with that found to be effective inthe linearly elastic contact problem solved in Kikuchiand Oden[15]. In actual calculations, the choice of (J
sufficicntly small will always allow onc to calculate{~.t}g using (4. II c).
Figure 10 shows computed geometry changes. Thepenetration of the foundation at the point far fromthe axis of axisymmetric coordinate is larger thanthat around the axis. This implies that the maximumcontact pressure does not occur at the apex of theshell but at some point away from this axis, Furtherdetails on such calculations and extensions to moregeneral contact conditions are to be included in alater paper.

910 T, ENDO et aJ.
REFERENCESI. E. Riks. An incremcntal approach to the solution of
snapping and buckling problcms, Tnt. J, Solids Struc-tures 15. 529-551 (1979).
2, E, B. Becker. A numerical solution of a class ofproblems of I1nite elastic deformation, Ph.D. Dis-sertation. Univcrsity of California. Bcrkelcy (1966).
3. J. T. Odcn. Analysis of large deformation of elasticmembranes by the finitc element method. Proc, TASSTnl. Congr, Large-Span Shells. Leningrad (1966).
4. J. T. Odcn and T. SalO. Finite strains and displaccmentsof elastic membranes by the finite element method. Tnt.J. SoJids StTllclures l. 471-488 (1967),
5, J, T. Odcn. Finite Elements oj Nonlinear Conlinua.McGraw-HilI. New York (1972).
6, A. S, Aly. A finitc clement analysis for problcms orIargcstrain and largc displacement. Ph.D. Disscrtation. Uni-versity of Texas, Austin (1981)
7, T. H, Miller. A finitc element study of instabilities inrubber elasticity. Ph.D. Dissertation. University ofTexas. Austin (1982).
8. E. Riks. On lhe numerical solution of snapping prob-lems in the theory of elastic stability. SUDAAR No.401, Stanford Univcrsity, Stanford. California (1970).
9, E. Riks. The application of Newton's method to theproblems of elastic stability. J. Appl, Mech, 39.1060-1066 (1972).
10, G. A, Wempncr. Disc'tte approximations related tononlinear theories of SO\ids.Tnl. J. Solids Struclllres 7.1581-1599 (1971).
II. H. B. Keller, Numerical solution of bifurcation andnonlinear eigenvalue problems. In Applications of Bifur-cation Theory (Edited by Rabinowitz). pp. 359-385.Academic Prcss. New York (1977).
12, H, B, Keller. Practical procedurcs in path followingnear limit point. In Compuling MelJlOds in AppliedScienc('s and Engineering (Editcd by G10winski andLions), North-Holland, Amstcrdam (1982).
\3. M. A. Crisfield. A fast incremental/iterative solutionprocedurc that handles 'snap-through', Comput. StTllC-lu,,'s t 3, 55--62 (1981).
14, J. Padovan and T. Arechaga. Formal convcrgencccharacleristics of elliptically conslraint incrementalNewlon-Raphson algorithms. Jill. J. Engng Sci. (toappear).
15. N. Kikuchi and J. T. Odcn, Contact Problems inElasticity. SIAM Publications. Philadelphia (to appear),
16, J, T. Oden and 0, Jacquotte. Stability of RIP methodsfor Stokesian flows. TICOM Rep .. 82-8, Austin. Texas(1982).
17, A. E, Grcen and j, E. Adkins, Large Elastic Defor-Illations. Oxford University Press, New York (1960).
18. R, S. Rivlin and D. W. Saunders. Philosophical Trans.Royal Soc, in Landon. Serics A. Publication 243 (1951). •





![1984 [Philip S.marcus] Simulation of Taylor-Couette Flow. Part I. Numerical Methods and Comparison With Experiment](https://static.fdocuments.in/doc/165x107/577c79b61a28abe05493c690/1984-philip-smarcus-simulation-of-taylor-couette-flow-part-i-numerical.jpg)