Josephson - Clinical Cardiac Electrophysiology Techniques An

HAL Id: inria-00616180https://hal.inria.fr/inria-00616180
Submitted on 16 Jul 2013
HAL is a multi-disciplinary open accessarchive for the deposit and dissemination of sci-entific research documents, whether they are pub-lished or not. The documents may come fromteaching and research institutions in France orabroad, or from public or private research centers.
L’archive ouverte pluridisciplinaire HAL, estdestinée au dépôt et à la diffusion de documentsscientifiques de niveau recherche, publiés ou non,émanant des établissements d’enseignement et derecherche français ou étrangers, des laboratoirespublics ou privés.
A Multi-Front Eikonal Model of CardiacElectrophysiology for Interactive Simulation of
Radio-Frequency AblationErik Pernod, Maxime Sermesant, Ender Konukoglu, Jatin Relan, Hervé
Delingette, Nicholas Ayache
To cite this version:Erik Pernod, Maxime Sermesant, Ender Konukoglu, Jatin Relan, Hervé Delingette, et al.. A Multi-Front Eikonal Model of Cardiac Electrophysiology for Interactive Simulation of Radio-Frequency Ab-lation. Computers and Graphics, Elsevier, 2011, 35, pp.431–440. �inria-00616180�

A Multi-Front Eikonal Model of Cardiac Electrophysiology
for Interactive Simulation of Radio-Frequency Ablation
E. Pernod1, M. Sermesant1,3,∗, E. Konukoglu2, J. Relan1, H. Delingette1, N. Ayache1
1INRIA, Asclepios Team, Sophia-Antipolis, France2Microsoft Research, Cambridge, UK
3King’s College London, St Thomas’ Hospital, UK∗Corresponding author: [email protected], 2004 route des Lucioles, 06902 Sophia Antipolis, Tel: +33 4 92 38 78
11, Fax: +33 4 92 38 76 69
Abstract
Virtual reality based therapy simulation meets a growing interest from the medical community due to its po-tential impact for the training of medical residents and the planning of therapies. However, computer modelsof the human anatomy are often very computationally demanding, thus incompatible with the constraintsof such interactive simulations.
In this paper, we propose a fast model of the cardiac electrophysiology based on an eikonal formulationimplemented with an anisotropic fast-marching method. We demonstrate the use of this model in the contextof a simulator of radio-frequency ablation of cardiac arrhythmia from patient-specific medical imaging data.Indeed, this therapy can be very effective for patients but still suffers from a rather low success rate. Beingable to test different ablation strategies on a patient-specific model can have a great clinical impact.
In our setting, thanks to a haptic 3D user interface, the user can interactively measure the local extracellu-lar potential, pace locally the myocardium or simulate the burning of cardiac tissue as done in radio-frequencyablation interventions.
Keywords: Medical interactive simulation, Modeling of the heart, Haptic device
1. Introduction
Cardiac arrhythmias are pathologies characterisedby an abnormal heart beat or rhythm. The contrac-tion and relaxation of the heart is indeed controlledby the depolarisation and repolarisation of the car-diac cells that propagates through the myocardium,from the sinus node, the natural pacemaker of theheart, to the ventricles. The abnormal propagationof the electric wave inside the heart leads to dysfunc-tion of cardiac mechanics causing a loss of efficiencywhen pumping the blood to the general circulation.
Treatment of cardiac arrhythmias has considerablychanged, for instance with radio-frequency (RF) ab-
lation becoming widely available as an alternative todrug therapy. These interventions are carried outunder x-ray guidance, with specialised catheters formaking invasive recordings of the electrical activityin the heart, and even reconstruct the chamber ge-ometry. RF ablation can be used to burn the patho-logical cardiac cells responsible for abnormal electro-physiological propagations. One source of difficultyfor cardiologists when performing this intervention isto locate those cells based on the reading of multi-ple electrical signals acquired in the heart. In manycases, the therapist adopts a trial and error approachby continuously checking if the electric propagationis altered by the performed ablation. Furthermore,
Preprint submitted to Elsevier February 2, 2011

partly due to the challenge in performing the inter-vention, a large proportion (around 50 %) of patientsbeing ablated have a recurrence of the pathology atleast 6 months after the intervention.
Therefore, these procedures can be highly effectivewith minimal side effects but some groups of patientshave unsatisfactory success rates and may entail longprocedures with high x-ray radiation dose to bothpatient and staff. Moreover, serious side effects canarise if the lesions extend beyond the target area, forthe ablations. There is a need for substantial inno-vation in order to reliably achieve successful resultsin an acceptable time, with lower radiation dose andreduced risk of accidental damage to adjacent struc-tures.
The aim of this research work is to design modelsof the cardiac electrophysiology that are suitable forclinical use and to propose methods to combine thesemodels with interventional data in order to betterestimate the patient cardiac function and help in thetraining, planning and guidance of such procedures.
During the last decades, important progress hasbeen made in modelling the cardiac electrophysiol-ogy, with the design of more and more complete ionicmodels [1]. However, the integration of such modelsat the scale of the organ often proves difficult, as thisresults in complex reaction-diffusion equations whichrequire careful mathematical analysis and produceimportant computational load. See for instance [2]for an analysis of this problem.
To tackle this, rule-based models were developedin many areas of computational biology allowing tostudy the spatial interaction of cells with discretisedbehaviours. This leads to a better understandingof interaction phenomena at a much larger scale.There have been many examples of cellular automataused to model excitable media. However, cellular au-tomata do not derive from the discretisation of a con-tinuous model, thus the impact of the topology andsize of the grid on the resulting dynamics is difficultto control, for instance on the anisotropy [3]. Differ-ent extensions to the classical cellular automata havebeen proposed in the literature to better reproducethe behaviour of reaction-diffusion models (like cur-vature [4]) but these often remain ad hoc as this isnot the discretisation of a continuous model.
In this article, we propose to integrate both thecontinuous dynamics, through an eikonal approxi-mation of the reaction-diffusion systems, and thediscrete states, through a cellular automaton, inorder to achieve fast simulations of the propaga-tion, while preserving most of the properties of thereaction-diffusion model. To achieve this, we use theFast-Marching Method (FMM) with several improve-ments, in order to be able to take into account theanisotropy of the propagation and the existence ofseveral fronts.
Virtual-reality based surgery simulation opens upnew fields in medical training and planning of ther-apies. In this paper, we investigate the developmentof a simulator prototype for rehearsing RF ablationof the myocardium based on the proposed model.
2. Electrophysiology Models
Modelling the cell electrophysiology is an active re-search area since the seminal work of Hodgkin andHuxley [5]. The precise modelling of the myocardiuminvolves a cell membrane model embedded into a setof partial differential equations (PDE) modelling acontinuum. We can divide these models into threecategories, from the more complex to the simpler (nu-merically):
• Biophysical models: semi-linear evolution Par-tial Differential Equation (PDE) with ionic mod-els (up to fifty equations for ions and chan-nels [6, 7, 8, 9, 1])
• Phenomenological models: semi-linear evolutionPDE with mathematical simplification of bio-physical models (bidomain, monodomain [10,11])
• Eikonal models: one static non-linear PDE forthe depolarisation time derived from the pre-vious models (Eikonal-Curvature [12], Eikonal-Diffusion [13])
PDE based electrophysiology models are more so-phisticated and can account for complex physiologi-cal states such as ischemia or arrythmia. However,they often rely on a large set of parameters that are
2

difficult to personalize and are computationally verydemanding at the organ scale. Indeed the space scaleof the electrical propagation fronts is in general muchsmaller than the size of the ventricles and fine meshmust be used.
On the other hand, eikonal models only simu-late the time at which a front reaches a given pointand therefore lead to much faster computations.Such models can be used to estimate patient-specificparameters [14], or explore a large set of simula-tions [15].
Eikonal models are derived as asymptotic solutionsof PDEs and therefore both approaches can be easilycompared [16, 17]. Differences can appear due to theboundary conditions: for PDEs, these are Neumannboundary conditions, which impose the no-flux con-dition at the boundary, whereas the eikonal equationhas no such constraints. Another difference can arisefrom the fact that in PDEs the speed of the travel-ling front is time dependent whereas in eikonal form,only a constant speed asymptotic value is considered.In [17], Konukoglu et al. have added correcting termsin the eikonal models in order to minimize those dis-crepancies.
One important limitation of eikonal models is thatthey only describe the time of depolarization with-out describing the state of repolarization and re-fractoriness of cardiac cells. Those phenomena arevery important for the simulation of arrythmias.Jacquemet [16] proposed an extension of those mod-els to consider periodic arrythmia without taking intoaccount the dynamic aspect of restitution curves. Inthe remainder, we detail a multi-front eikonal modelwhich captures the main characteristics of cardiacelectrophysiology propagation (anisotropy, refractoryperiod, repolarisation, restitution curve) at a lowcomputational cost [18].
2.1. The Anisotropic Fast Marching Method
The classical FMM [19] can be used to very effi-ciently solve the standard isotropic eikonal equation:
F (X)√
∇T (X)tD(X)∇T (X) = 1 (1)
where T (X) is the arrival time at point X and F (X)the local speed function. D(X) is a 3× 3 symmetric
tensor defining the anisotropy of the propagation atpoint X. In the classical isotropic case, D(X) is theidentity matrix. Whereas in the anisotropic case, itcaptures the fact that the electrical propagation isroughly three times faster along the fibre orientationthan in its transverse direction. Therefore, this tensoris computed as:
D(X) =1
9I +
8
9f(X)⊗ f(X) (2)
where I is the identity matrix and f(X) is the unitfibre orientation vector at point X.
In this method, points are separated into threesets: UNKNOWN , TRIAL, and KNOWN , andthe TRIAL set of points X is ordered along the in-creasing associated times T (X). N (X) is the neigh-bourhood of X. In the initialisation step, all pointsare labelled as UNKNOWN with a time of +∞,starting points are labelled as KNOWN with a timeof 0, and their neighbours are iteratively updated.The FMM algorithm is described here briefly, see Al-gorithm 1.
Algorithm 1 Fast Marching Method
while TRIAL list is not empty do
X ← argminX∈TRIAL{T (X)}remove X from TRIAL and add X to KNOWNfor all Xi ∈ N (X) and Xi /∈ KNOWN do
compute T (Xi) = UPDATE(Xi, X)if Xi /∈ TRIAL then add Xi to TRIAL
end for
end while
Taking into account the anisotropy of the propaga-tion is important in many cases of excitable media.But introducing this phenomenon in the FMM is nottrivial. Indeed, the regular FMM uses the collinear-ity between the time gradient and the characteristicdirection to solve the equation very efficiently, butin the anisotropic case these directions do not matchany more.
There have been many different algorithms pro-posed to solve such anisotropic equations usingsingle-pass [20, 21] or iterative [22, 23] methods.We proposed a fast algorithm for solving anisotropic
3

eikonal equation on general meshes without increas-ing the neighbourhood size around each vertex andfollowing the characteristic direction similar to single-pass methods. The idea is to include a recursive cor-rection scheme taking into account the fact that, dueto anisotropy, the immediate neighbourhood usedfor computation may not always contain the char-acteristic direction at the time it is computed. Toachieve this, an additional CHANGED list is in-troduced which is also empty at the beginning andwhich is used during the recursive correction step.This efficient algorithm can cope with very impor-tant anisotropies and can be applied to more generalforms of static convex Hamilton-Jacobi equations,and on Cartesian or unstructured grids [24]. Pseudo-code is provided in the following algorithms 2 and 4(UPDATE function in Annex).
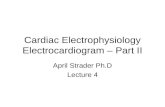
The anisotropic FMM algorithm is not significantlylonger to compute than the standard FMM algo-rithm, especially when the anisotropy is moderate.For instance with a factor of three between longitu-dinal and transverse speeds as in cardiac tissue, simu-lation on a 13 000 nodes mesh only takes few seconds.The results are presented on a cubic mesh, composedof 13 000 nodes and 75 000 tetrahedra. The initiali-sation is in the front top corner (see Figure 1).
2.2. A Multi-Front Fast Marching Approach
The FMM is a static method to solve for an evolv-ing front, in the sense that the variable of the eikonalequation is time. But for our purpose, we can haveseveral fronts evolving at the same time, because car-diac cells go back to a resting state, so they can beexcited again before the first front disappeared. Thekey idea is to introduce a time-stepping scheme whileusing the FMM to compute the propagation duringeach time step.
In order to achieve this, we also have to introducea refractory state, between the excited and the equi-librium state, otherwise, any node going back to theequilibrium would immediately be excited again byhis neighbours still excited. This is in agreement withcardiac electrical action potential propagation, wherecells have this refractory period [1]. The Multi-FrontFMM is described in algorithm 3.
Algorithm 2 Anisotropic Fast Marching
while TRIAL or CHANGED are not empty do
if CHANGED is not empty then
X ← argminX∈CHANGED{T (X)}remove X from CHANGED
else
X ← argminX∈TRIAL{T (X)}remove X from TRIAL and add X toKNOWN
end if
for all Xi ∈ N (X) and Xi ∈ KNOWN do
compute T (Xi) = UPDATE(Xi, X)if T (Xi) < T (Xi) then
T (Xi)← T (Xi)add Xi to CHANGED list
end if
end for
for all Yi ∈ N (X) and Yi ∈ TRIAL ∪UNKNOWN do
compute T (Yi) = UPDATE(Yi, X)if Yi ∈ TRIAL and T (Yi) < T (Yi) then
T (Yi)← T (Yi)else if Yi ∈ UNKNOWN then
T (Yi)← T (Yi)remove Yi from UNKNOWN and add Yi
to TRIALend if
end for
end while
This Multi-Front FMM is able to simulate an im-pulse train on a piece of excitable media (see Fig-ure 2).
2.3. Cardiac Electrophysiology Simulation
The presented algorithm can be used to simulatetransmembrane potential propagation in cardiac tis-sue. The idea is to compute the depolarisation timeusing the Multi-Front Anisotropic FMM. The localspeed F corresponds to the local tissue conductiv-ity. Then, when a given vertex is depolarised, we usethe time-stepping to know when the vertex goes intorepolarisation and then refractory period, and whenit is excitable again. The time during which a cellis depolarised is called the Action Potential Duration
4

Figure 1: Isochrones of the simulated front, red colour corre-sponds to small times, green to large times. (Top) IsotropicFast Marching (Bottom) Anisotropic Fast Marching on tetra-hedral unstructured grid, the anisotropic direction is vertical.Initialisation is in the front top corner.
(APD) and it corresponds to the period during whichthe cardiac fibres are actively mechanically stretched.Furthermore, we can compute a pseudo transmem-brane potential, which is at 10 mV when the vertexis depolarised (red), and -90 mV when it is excitable(blue), and interpolated using a precomputed curvein between (see Figure 3). Compared to similar ap-proaches in propagation simulation [25], it could beseen as a “continuous cellular automaton”: the statesare still discrete, but the propagation is continuous.
To better simulate the cardiac cells’ behaviour, it
Algorithm 3 Multi-Front Fast Marching Algorithmon a period T . IT : Integrated Time, ET : ElapsedTime, RT : Repolarisation Time, RP : Refractory Pe-riod
IT = 0.0while IT < T do
ET = 0.0while TRIAL not empty and ET < timeStepdo
X ← argminX∈TRIAL{T (X)}remove X from TRIAL and add X toKNOWNfor all Xi ∈ N (X) and Xi ∈ UNKNOWNdo
compute T (Xi) = UPDATE(Xi, X)if Xi /∈ TRIAL then add Xi to TRIALET = T (Xi)− IT
end for
end while
IT + = timeStepfor all X ∈ KNOWN do
if IT − T (X) > APD(X) then
remove X from KNOWN and add X toREFRACTORYRT (X)← T (X) + APD(X)
end if
end for
for all X ∈ REFRACTORY do
if IT −RT (X) > RP (X) then
remove X from REFRACTORY and addX to UNKNOWN
end if
end for
end while
is important to introduce the restitution curve, whichis the relationship between the pacing frequency andthe APD [11]. Several different curves can be found inthe literature, depending mostly on the experimentalprotocol [26]. This can be directly used within ourmodel, as we compute the APD at cycle n + 1 as afunction of the previous diastolic interval (DI) DIn
5

Figure 2: (Top) Impulse train with the Multi-Front FastMarching (anisotropic case). Excited vertices are in red andrefractory vertices are in green. (Bottom) Isosurface of thecompletely computed depolarisation front: a smooth front canbe displayed instead of the pseudo potential.
(time during which a cell is repolarised):
APDn+1 = Tclose∗log
(
1−(1− hmin) ∗ exp
−DIn
Topen
hmin
)
(3)
2.4. Radio-Frequency Ablation Model
There are numerous publications on the detailedsimulation of the radio-frequency ablation, as thistechniques is widely used in different clinical appli-cations (liver tumours, cardiac arrhythmias) [27, 28,
0 200 400 600 800 1000!100
!50
0
50
Time (in ms)
Tra
nsm
em
bra
ne P
ote
nti
al
(in
mV
)
!"#$% #&$% !"#$'(%)"$% )"$'(%
!*+,-./0%
)/12-*.324%
)/5.%
Figure 3: Transmembrane potential (red) computed from thediscrete states (green).
29]. Such models aim at predicting the evolution ofthe tissue temperature as a function of the deliveredenergy taking into account various cooling effects.This is important in order to ensure that the heatedtissue creating lesions do cover the targeted volume,in an optimal time.
Here, as a first approximation, we used a very sim-plified model for which the lesion size is user-definedand the conductivity F of tetrahedral elements con-sidered as ablated is set to zero.
The parameter values of the electrophysiologymodel as function of tissue type are summarized in ta-ble 1. Restitution curves for healthy and peri-infarctcardiac tissues are shown in Figure 4.
3. Implementation
3.1. Visualisation and Computation in SOFA
The proposed work has been implemented in anopen source framework, SOFA [30] suitable for real-time modelling of deformable structures and mechan-ical behaviours, particularly for medical simulation.
6

0 0.5 1 1.5
0.1
0.2
0.3
Diastolic Interval (in s)
Acti
on
Po
ten
tial
Du
rati
on
(in
s)
Healthy
Isthmus
Figure 4: Restitution curves for isthmus (green) and healthy(red) tissues.
Healthy Peri-infarct Scarsor Ablated
F (cm/s) 50 30 0Tclose(s) 0.15 0.25 N/ATopen(s) 0.3 0.1 N/A
hmin 0.3 0.3 N/A
Table 1: Parameter values used for the restitution curve duringthe VT simulation.
SOFA is an open-source library mostly written inC++ and using XML script language. Its architec-ture has been designed to be very modular with alean core containing the overall architecture and pro-totype functions and on the other side, a large setof modules derived from the core. To link the dif-ferent components (C++ modules of the framework)together, scene graphs (simulation tree in XML for-mat) are used to describe a simulation.
In this work, several modules related to haptic ren-dering and collision detection have been used to pro-vide a satisfactory user interface. Furthermore, we
developed specific data containers in order to storethe semantic and structural information associatedwith a tetrahedral mesh of the myocardium : defi-nition of endocardium, epicardium surfaces, scar re-gions and fibre orientation at each tetrahedron (seeFigure 5). For the scene visualisation, SOFA inte-grated graphical interface based on 3D OpenGL wasused. Volumetric meshes can be displayed with onedimensional textures either to represent the pseudoaction potential or the isochrones. The multi-frontanisotropic FMM was implemented as a SOFA solver
component combined with the time-stepping mecha-nism already implemented in SOFA.
Figure 5: Visualisation of the fibre directions stored in eachtetrahedron of a volumetric mesh of the myocardium.
3.2. Benchmarks
We benchmarked the performance of our multi-front anisotropic FMM (on a Intel Xeon CPU, 8cores, 2.66 Ghz, 16 Go RAM) to evaluate the effectof mesh resolution and conduction anisotropy on ouralgorithm. In a first stage, we used a simple geometryrepresenting a beam of size 5×2×2 cm with differentmesh resolutions 6: Those tetrahedral meshes have
Mesh size Tetrahedra Vertices Grid resolutionSmall 51 840 10 309 60×12×12
Medium 101 250 19 456 75×15×15Large 240 000 44 541 100×20×20
Table 2: Meshes used for the benchmarks
been tessellated from a regular voxel grid. In those
7

experiments, we assumed that the conduction veloc-ity along the beam longest axis was 50 cm/s (typi-cal velocity in cardiac tissue) starting from a singlepoint located at a corner of the beam. In case ofanisotropic simulation, the conduction velocity wasset to be three times slower along the beam shortestaxis. In Figure 1, isochrones of two propagations aredisplayed, showing the effect of anisotropy.
The time step for those benchmarks has been set to3 ms thus requiring around 33 to 43 iterations beforedepolarising the whole beam. In Figure 7 we plottedthe computation time spent during each time step forthe isotropic and anisotropic cases and for the threemesh resolution. As expected, in the isotropic case,the beam is depolarised in a bit more than 100 msand the computation time reaches a plateau when thefront corresponds to a section of the beam and there-fore the same number of nodes needs to be updatedat each time step.
Figure 6: Beam tetrahedral meshes having three different meshresolutions.
In the anisotropic case, such plateau does not existsince propagation fronts are no longer planar, hav-ing curved shapes varying along the beam. The waverequired 130 ms to depolarise the whole beam sincethe wave has a slower transversal speed. Table 3 com-pares the total computation time (i.e. the area be-low each curve of Figure 7) as a function of meshsize and anisotropy. Clearly the total computationtime is proportional to the number of mesh nodes andthe anisotropic propagation requires in average 27 %more computation. It should also be noticed that thepeak computation time per time step is also 27 %greater in the anisotropic case than in the isotropiccase. This means that the increased computation
time due to anisotropy is not only caused by a longerpropagation but also by more computations per timestep.
0
50
100
150
200
250
300
350
400
0
0.00
9
0.01
8
0.02
7
0.03
6
0.04
5
0.05
4
0.06
3
0.07
2
0.08
1
0.09
0.09
9
0.10
8
0.11
7
0.12
6
0.13
5
0.14
4
0.15
3
0.16
2
Co
mp
uta
tio
n t
ime
pe
r ti
me
ste
p (
ms
) Simulation time steps (s)
52k isotropic
52k anisotropic
101k isotropic
101k anisotropic
240k isotropic
240k anisotropic
Figure 7: Computation time per time step as a function ofmesh resolution and anisotropy.
Mesh size Isotropic AnisotropicSmall 1.10s 1.40s
Medium 2.23s 2.84sLarge 5.51s 7.15s
Table 3: Total computation time to depolarise a beam as afunction of mesh size and anisotropy ratio.
A second set of benchmarks was performed on amyocardium mesh consisting of 10 213 vertices and47 382 tetrahedra (see Section 4.1). In this case,anisotropic propagation was simulated with the sameanisotropy ratio and conduction velocity as in thebeam experiment. Figure 8 (Top) shows the plot ofthe computation time per time step as done previ-ously on the beams as well as the percentage of nodeslabelled as accepted (or depolarised) or refractory (intheir refractory period). One can see that the com-putation time curve is bell-shaped which matches thepattern observed on anisotropic propagation for thebeam. Furthermore, one can see that the proportionof depolarised nodes increases to 100 % when the my-ocardium is fully depolarised. Then, this proportionslowly decreases as more and more nodes are labelledas refractory and then at rest. One should notice that
8

the change of states (from accepted to refractory torest) requires a negligible computation time.
0
200
400
600
800
1000
1200
1400
1600
1800
0.03 0.12 0.21 0.3 0.39 0.48 0.57 0.66 0.75 0.84
Cu
mu
late
d c
om
pu
tati
on
tim
e (
ms
)
Simulation time steps (s)
Simulation time step
Isotropic computation time
Anisotropic computation time
0
50
100
150
200
250
300
350
0 0.09 0.18 0.27 0.36 0.45 0.54 0.63 0.72
Co
mp
uta
tio
n t
ime p
er
tim
e s
tep
(m
s)
Simulation time steps (s)
Percentage of "refractory" nodes
Percentage of "accepted" nodes
Computation time
Figure 8: (Top) computational time per time step (in red)and percentage of point depolarised and in a refractory stage;(Bottom) Cumulative computation time for anisotropic andisotropic propagation for one heart beat compared to the cu-mulative simulation time.
Finally, in Figure 8 (Bottom) we investigate thediscrepancy between the simulation time and thecomputation time. Ideally, one would expect thatcomputation time for a single time step of 3 ms isexactly 3 ms. However, unlike classical PDE iter-ative solvers, our algorithm is asynchronous in thesense that the number of nodes processed at eachtime step may greatly varies. In this figure, we com-
pare the cumulative computation time in red and or-ange with the ideal cumulative time in case of syn-chronicity (computation time is equal to simulationtime) in blue. One can see that the computationtime is always lagging behind the simulation time.This delay grows quickly during the depolarisationphase (where the anisotropic FMM is computed) butresides during the repolarisation and diastolic phase(where only the states are updated). In the case ofisotropic propagation the total computed time for asingle heart beat is almost equal to the total simu-lated time (near 0.9 s). However, the perceived prop-agation is slightly distorted since the depolarisationis artificially slowed down while the diastolic intervalis accelerated. The anisotropic propagation is evenmore distorted with a 60 % increase in total computa-tion times. This study shows that while our proposedalgorithm is fairly close to real-time computation (upto a factor 1.9), it entails some significant alterationsin the perceived propagation which must be correctedby a further speed-up.
4. Radio-Frequency Ablation Simulator
In addition to simulating cardiac electrophysiology,we propose in this paper to develop a simulator totrain cardiologists in performing RF ablation. To becomplete such simulators should also reproduce thecatheter navigation performed under X-ray guidancewhich contributes to the difficulty in performing theintervention. Several research groups [31, 32] andcommercial companies [33, 34] are developing suchendovascular navigation simulators, but we focus onthe simulation of electrophysiology propagation andradio-frequency ablation which are suitable for real-time interaction.
4.1. Simulation Scene
As explained previously, multi-front anisotropicFMM is an efficient computational method to ap-proximate the propagation of transmembrane poten-tial in the heart. We can thus visualise that poten-tial as a coloured texture. In order to illustrate theradio-frequency ablation simulation, we build a sim-ulation scene corresponding to ischemic Ventricular
9

Tachycardia (VT), an example of cardiac arrhythmia.In this pathology, the myocardium includes severalnecrotic regions or scars that appear after an infarct.Those scars can be imaged with a specific MR proto-col, late enhancement MR, and are known to corre-spond to regions of very low conduction velocity. Inthe scene, we have decided to create synthetically apartially transmural isthmus between the two scarsregions, which occurs frequently on patients suffer-ing from VT [35]. This isthmus, represented in redin Figure 9, is composed of peri-infarct tissues forwhich the propagation of electrical waves is sloweddown.
Figure 9: Conduction velocities of the myocardium. Zones inwireframe have normal conductivity while blue regions (scars)have lower values and the red region (isthmus) has intermedi-ate values.
To prevent fast heart beats and re-entries, radio-frequency ablation has been shown to be an efficienttherapy if performed optimally [36]. During this pro-cedure, catheters are used to permanently burn car-diac tissues with electromagnetic radiations havinglow voltage and frequencies in the radio-frequencyrange. When heated, the damaged tissue is no longerable to conduct electrical waves preventing the ar-rhythmia from occurring.
Concretely in SOFA, to simulate this pathology, avolumetric mesh of the right and left ventricles withscars has been generated from MRI. This mesh iscomposed of 10 213 vertices and 47 382 tetrahedra.Figure 9 shows the conductivity map on this mesh.Healthy tissues have a conduction velocity of 50 cm/swhereas the scar regions (in blue) have no conduction
velocities and the isthmus (in red) has a conductionvelocity of 30 cm/s.
4.2. Interactive Simulation
We first developed two mechanisms with which theuser can interact with the scene. The first one con-sists in locally modifying the conductivity of a re-gion of the myocardium whereas the second one per-forms an electrical stimulation which generates an ad-ditional electrophysiological wave by forcing the stateof neighbouring nodes.
We bound those two interactions to mouse eventsand then, to improve the realism of the simulation, weinterfaced them with a 3D user interface. Ideally, theuser should interact with a force-feedback interven-tional radiology simulator which would allow the userto navigate a catheter through blood vessels and per-form various actions (measuring potentials and ablat-ing tissue). However, as a first prototype, we are us-ing the Xitact ITP instrument [33] which is designedfor laparoscopic simulation with force-feedback. Thistool allows 3D positioning and consists of one trackedinstrument with a button and two pedals.
For this instrument the position and orientation ofits tips can be read through a serial port at a highfrequency. A complete description of the handling ofhaptic device, positioning and force feedback in theSOFA framework, can be found in [37].
Figure 10: Picture of the ITP Xitact tool and its correspondingmodel. The tool tip corresponds to a sphere collision model.
4.3. Instrument Model
Due to the nature of the 3D user interface, we as-sume that catheters are rigid instruments thus avoid-ing the simulation of flexible catheters that would be
10

used for this kind of intervention. Figure 10 showsthat the instrument is modelled as a thin rigid shaftwith a sphere at its extremity. This tip is used tosimulate the catheter interaction (potential stimula-tion and ablation). The sphere serves as a collisionmodel for the collision detection with triangles on themyocardium surface (see Figure 11). Thus, as soonas the sphere intersects a triangle, a collision is de-tected and the information is sent through the defaultcollision pipeline of the SOFA framework [30]. Uponthe detection of a collision, no force-feedback is sentback to the device in this first prototype. Instead,to guide the user, the part of the mesh being in col-lision is highlighted as a selected area and its scalemay be modified as seen in Figure 11. Then, the usercan push a button on the ITP device either to simu-late cardiac tissue ablation (changing its conductionvelocity to zero) or to perform an electrical stimula-tion. A foot pedal is used to change the nature of theinteraction.
Figure 11: Collision model representations. A sphere modelis used for the tool whereas the myocardium collision modelconsists of tetrahedra. The contact region is shown in green.
In future work, we plan to use the Xitact VIST-C device for this simulation. By integrating ourproposed algorithms of fast cardiac electrophysiologi-cal modelling with existing developments on catheternavigation already implemented in the SOFA frame-work [31], we think that a more realistic simulatorshould be built in the near future, although somework remains to be done.
5. Simulation Results
To display the electrophysiology simulations, weuse a colour map from blue to red, to represent thetransmembrane potential of each vertex. Depolarisedvertices are red, repolarised vertices are blue. At theinitialisation stage, all vertices are set to the restingstate.
Then, a stimulation is performed periodically atthe apex of the right ventricle at a period of 300 msto simulate a clinical procedure called VT Stim. Thisprocedure is performed to test the inducibility of ven-tricular tachycardia of a patient and decide whethera defibrillator should be implanted. The electricalwave resulting from the stimulation takes approxi-mately 250 ms to cover the two ventricles.
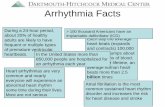
The first row of Figure 12 shows the resulting wavepropagation (the cardiac fibres responsible for theanisotropy can be seen in the first image). As ex-pected, the scars remain blue, since it is non con-ductive whereas the isthmus zone has a different be-haviour than neighbouring healthy tissues. Indeed,the wave enters the isthmus through the upper side(A) and then exits by its lower bound (B). Then, dueto different parameter values of the restitution curve,these vertices have a longer refractory period thanhealthy tissue (second row of Figure 12). As a result,when the second wave (wave T+1) reaches the upperbound of the isthmus, it can no longer go throughthis path. However, as the isthmus is no longer inrefractory period when the second wave reaches thepoint B, it can then enter the isthmus through thispoint. This pattern is called an unidirectional block,and it can generate a re-entry wave (third row of Fig-ure 12). In an ischemic VT, this re-entry wave canturn around the scars through the isthmus and thencreate additional ventricular contractions leading totachycardia. In those cases, when the wave T+1 goesthrough the isthmus from the point B, on the otherside (point A), healthy tissues are already in repo-larised state. Thus, when reaching the point A, thewave will be able to propagate into the heart, as it isthe case in the third row of Figure 12, and potentiallysustain itself by repeating this pattern.
Additionally to the simulation described above, wesimulated interactively the radio-frequency ablation
11

Figure 12: Simulation of the VT stim procedure for VT ablation. The left catheter is at the apex of the right ventricle topace the heart at different frequencies. The right catheter is within the left ventricular cavity in order to ablate the isthmusbetween two scars responsible for re-entries. Electrophysiological wave propagation simulated with a multi-front eikonal model.Successive waves are represented as well as isthmus boundaries (T, T+1, A and B on first image). There is an associated video.
therapy. In this case, the aim is to close the isthmusin order to prevent re-entry loops. With this set-
ting, several radio-frequency ablations are performedaround the isthmus in order to burn its tissue and get
12

a large region with zero conduction velocity whichblocks electrical waves. To ensure that the path iscompletely blocked, stimulation can be performedduring the intervention by actioning a foot pedal.By applying stimulations near the scars, one createsa new potential wave to check that the isthmus hasbeen successfully ablated.
Figure 13: Simulation of the ablation of the isthmus. Coloursreveal the underlying conductivity (green: healthy, red: scar).There is an associated video.
5.1. Discussion
To assess the accuracy of the simulation, it is possi-ble to compare the simulated isochrone map with theone measured by catheters during the interventionusing contact (i.e. the NavX or Carto systems) ornon-contact (such as the Ensite balloon) endocardialmappings. Further evaluation can be performed bycomparing stimuli conditions which can induce VT.
In terms of haptic simulation, no validation fromclinicians can be performed at the moment since ourprototype does not reproduce virtual catheter guid-ance to the heart, as it uses laparoscopic instrumentsfor force feedback.
6. Conclusion and Perspectives
We presented a new algorithm to achieve closeto real-time simulations of cardiac electrophysiol-
ogy. This model opens up possibilities for filter-ing (smoothing) and interpolating electrophysiologyrecordings, which could provide diagnosis and ther-apy planning tools. An excellent example applicationis the planning of radio-frequency ablation. Such areal-time model can be embedded in an interventionsimulator to test several ablation strategies.
To improve the model, future work includesspeeding-up the algorithm to reach synchronicity andtaking into account the impact of the curvature ofthe front on the propagation speed in the multi-frontcase. Accuracy of the method with respect to themesh and the gradient approximation must also becarefully estimated.
This model has been integrated in the open sourceframework SOFA. Using a 3D user interface, wehave presented a complete pipeline for the interac-tive simulation of cardiac radio-frequency ablation.A first prototype has been demonstrated for ischemicventricular tachycardia where re-entries may occurthrough an isthmus surrounded by scar regions. A3D rigid instrument allows the user to interactivelysimulate radio-frequency ablation by zeroing the con-duction velocity around intersected tetrahedra. Theuser can also apply focal stimulations to check theeffect of ablations.
There are several ways to improve the realism ofthe current prototype. For instance, the electrophys-iology model could be extended to better representthe pathological behaviour and to include patient-specific tissue properties, such as conductivity andrestitution curves. Real-time coupling between me-chanical deformations and electrophysiology propa-gations should be developed in order to provide ad-ditional realism. Finally, catheter navigation shouldbe made more realistic by using interventional radi-ology force-feedback simulators.
Annex
In order to compute the depolarisation time of avertex Xi within a tetrahedron (Xi, X, Y, Z) , Algo-rithm 4 is presented. It invoves three alternative min-imisations depending on the number of known neigh-bours among the three vertices X, Y , Z. These min-
13

imisations can be computed analytically and corre-spond to three distinct cases [23]:
1. If Xi has only one known neighbour X then theupdate does not include a minimisation and it iscomputed directly by linear extrapolation.
2. If Xi has two known neighbours X and Y , thenthe minimisation corresponds to solving the fol-lowing quadratic equation involving v(p), thepoint on the segment [X,Y ] located along thecharacteristic direction, p being its barycentriccoordinate (p ∈ [0, 1]) :
T (X)− T (Y ) +v(p)′D−1(
−−→XXi −
−−→Y Xi)
F [v(p)D−1v(p)]= 0,
withv(p) =
−−→XXip +
−−→Y Xi(1− p)
3. If Xi has three known neighbours X, Y , Z, thesolution becomes more complicated and we donot include it here in the interest of space. Werefer the interested reader to [23].
Algorithm 4 Computation of T (Xi) =UPDATE(Xi, X) in a Tetrahedrisation
T (Xi)← +∞Update Xi, the neighbours of X (which is known)within the surrounding tetrahedra TETX
Xi
for all TET (XXiY Z) ∈ TETXXi
={TET (XXiY Z)|Y,Z ∈ N (Xi)} do
if Y,Z ∈ KNOWN then
T (Xi) ← min{T (Xi),min(p,q)∈[0,1]2([T (X)p +T (Y )(1 − p)]q + T (Z)(1 − q) +[v(p, q)T D−1v(p, q)]1/2/F )} where
v(p, q) = [−−→XXip +
−−→Y Xi(1− p)]q +
−−→ZXi(1− q)
else if Y ∈ KNOWN then
T (Xi) ← min{T (Xi),minp∈[0,1](T (X)p +
T (Y )(1 − p) + [v(p)tD−1v(p)]1/2/F )} where
v(p) =−−→XXip +
−−→Y Xi(1− p)
else
T (Xi) ← min{T (Xi), T (X) +
[−−→XXi
tD−1−−→XXi]
1/2/F}end if
end for
References
[1] K. Ten Tusscher, D. Noble, P. Noble, A. Pan-filov, A model of the human ventricular myocyte,American Journal of Physiology - Heart and Cir-culatory Physiology 286 (4) (2004) 1573–1589.
[2] A. Garny, D. Noble, P. Kohl, Dimensionality incardiac modelling, Prog Biophys Mol Biol 87 (1)(2005) 47–66.
[3] B. Schnfisch, Anisotropy in cellular automata,Biosystems 41 (1) (1997) 29 – 41.
[4] M. Gerhardt, H. Schuster, J. J. Tyson, A cellularautomaton model of excitable media: II. curva-ture, dispersion, rotating waves and meanderingwaves, Physica D: Nonlinear Phenomena 46 (3)(1990) 392 – 415.
[5] A. Hodgkin, A. Huxley, A quantitative descrip-tion of membrane current and its application toconduction and excitation in nerve, Journal ofPhysiology 177 (1952) 500–544.
[6] D. Noble, A modification of the Hodgkin–Huxleyequations applicable to purkinje fibre action andpace-maker potentials, J Physiol 160 (1962) 317–352.
[7] G. W. Beeler, H. Reuter, Reconstruction of theaction potential of ventricular myocardial fibers,Journal of Physiology 268 (1977) 177–210.
[8] C. Luo, Y. Rudy, A model of the ventricular car-diac action potential: depolarization, repolariza-tion, and their interaction, Circulation Research68 (1991) 1501–1526.
[9] D. Noble, A. Varghese, P. Kohl, P. Noble, Im-proved guinea-pig ventricular cell model incor-porating a diadic space, IKr and IKs, andlength and tension dependent processes, Cana-dian Journal of Cardiology 14 (1998) 123–134.
[10] R. FitzHugh, Impulses and physiological statesin theoretical models of nerve membrane, Bio-physical Journal 1 (1961) 445–466.
14

[11] C. C. Mitchell, D. G. Schaeffer, A two-currentmodel for the dynamics of cardiac membrane,Bulletin Math Bio 65 (2003) 767–793.
[12] J. Keener, J. Sneyd, Mathematical Physiology,Springer, 1998.
[13] P. Colli Franzone, L. Guerri, S. Rovida, Wave-front propagation in activation model of theanisotropic cardiac tissue: Asymptotic analysisand numerical simulations, J. Math. Biol. 28 (2).
[14] P. Chinchapatnam, K. Rhode, M. Ginks, C. Ri-naldi, P. Lambiase, R. Razavi, S. Arridge,M. Sermesant, Model-based imaging of cardiacapparent conductivity and local conduction ve-locity for diagnosis and planning of therapy,IEEE Transactions on Medical Imaging 27 (11)(2008) 1631–1642.
[15] O. Camara, A. Pashaei, R. Sebastian, A. F.Frangi, Personalization of fast conduction purk-inje system in eikonal-based electrophysiologicalmodels with optical mapping data, in: Statis-tical Atlases and Computational Models of theHeart, First International Workshop and Car-diac Electrophysiological Simulation Challenge(STACOM/CESC), Proceedings, Vol. 6364 ofLecture Notes in Computer Science, Springer,2010, pp. 281–290.
[16] V. Jacquemet, An eikonal approach for theinitiation of reentrant cardiac propagation inreaction-diffusion models, IEEE Trans BiomedEng 57 (9) (2010) 2090–2098.
[17] E. Konukoglu, O. Clatz, B. H. Menze, M.-A. We-ber, B. Stieltjes, E. Mandonnet, H. Delingette,N. Ayache, Image guided personalization ofreaction-diffusion type tumor growth models us-ing modified anisotropic eikonal equations, IEEETransactions on Medical Imaging 29 (1) (2010)77–95.
[18] M. Sermesant, E. Konukoglu, H. Delingette,Y. Coudiere, P. Chinchaptanam, K. Rhode,R. Razavi, N. Ayache, An anisotropic multi-front fast marching method for real-time simu-
lation of cardiac electrophysiology, in: Proceed-ings of Functional Imaging and Modeling of theHeart 2007 (FIMH’07), Vol. 4466 of LNCS, 2007,pp. 160–169.
[19] J. Sethian, Level set methods and fast marchingmethods: Evolving interfaces in computationalgeometry, fluid mechanics, computer vision, andmaterials science, Cambridge University Press,1999.
[20] J. Sethian, A. Vladimirsky, Ordered upwindmethods for static hamilton-jacobi equations:theory and algorithms, SIAM J. Numer. Anal.41.
[21] J. Kevorkian, Partial differential equations: An-alytical solution techniques, Springer, 2000.
[22] C. Kao, S. Osher, Y. Tsai, Fast sweeping meth-ods for static hamilton-jacobi equations, SIAMJ. Numer. Anal. 42.
[23] J. Qian, Y.-T. Zhang, H.-K. Zhao, A fast sweep-ing method for static convex hamilton-jacobiequations, J. Sci. Comput. 31 (1-2) (2007) 237–271.
[24] E. Konukoglu, M. Sermesant, J.-M. Peyrat,O. Clatz, H. Delingette, N. Ayache, A recursiveanisotropic fast marching approach to reactiondiffusion equation: Application to tumor growthmodeling, in: Information Processing in MedicalImaging (IPMI’07), LNCS, Springer, 2007.
[25] M. Reumann, J. Bohnert, G. Seemann, B. Os-swald, O. Dossel, Preventive ablation strate-gies in a biophysical model of atrial fibrillationbased on realistic anatomical data, IEEE TransBiomed Eng 55 (2) (2008) 399–406.
[26] M. Nash, C. Bradley, P. Sutton, R. Clayton,P. Kallis, M. Hay-ward, D. Paterson, P. Taggart,Whole heart action potential duration resti-tution properties in cardiac patients: a com-bined clinical and modelling study., Experimen-tal physiology 91 (2) (2006) 339.
15

[27] D. Fuentes, R. Cardan, R. J. Stafford, J. Yung,G. D. D. III, Y. Feng, High-fidelity computermodels for prospective treatment planning of ra-diofrequency ablation with in vitro experimentalcorrelation, Journal of Vascular and Interven-tional Radiology 21 (11) (2010) 1725 – 1732.
[28] Y.-C. Lai, Y. B. Choy, D. Haemmerich, V. Vor-perian, J. Webster, Lesion size estimator of car-diac radiofrequency ablation at different com-mon locations with different tip temperatures,Biomedical Engineering, IEEE Transactions on51 (10) (2004) 1859 –1864.
[29] M. K. Jain, P. D. Wolf, A three-dimensional fi-nite element model of radiofrequency ablationwith blood flow and its experimental validation,Annals of Biomedical Engineering 28 (2000)1075–1084, 10.1114/1.1310219.
[30] J. Allard, S. Cotin, F. Faure, P.-J. Bensoussan,F. Poyer, C. Duriez, H. Delingette, L. Grisoni,Sofa an open source framework for medicalsimulation, in: Medicine Meets Virtual Reality(MMVR’15), USA, 2007.
[31] J. Dequidt, M. Marchal, C. Duriez, E. Kerrien,S. Cotin, Interactive simulation of embolizationcoils: Modeling and experimental validation, in:Proceedings of MICCAI, Lecture Notes in Com-puter Science, Springer, 2008, pp. 695–702.
[32] V. Luboz, C. Hughes, D. Gould, N. John,F. Bello, Real-time seldinger technique simula-tion in complex vascular models., InternationalJournal of Computer Assisted Radiology andSurgery 4 (6) (2009) 589–596.
[33] Mentice, Nan., http://www.mentice.com.
[34] Simbionix, Nan, http://www.simbionix.com.
[35] W. Stevenson, H. Khan, P. Sager, S. LA.,H. Middlekauff, P. Natterson, I. Wiener, Iden-tification of reentry circuit sites during cathetermapping and radiofrequency ablation of ventric-ular tachycardia late after myocardial infarction,Circulation 88 (1993) 1647–1670.
[36] U. K. Hanno, R. Ventura, D. Steven, C. Johnsen,T. Rostock, B. Lutomsky, T. Risius, T. Mein-ertz, S. Willems, Catheter ablation of multipleventricular tachycardias after myocardial infarc-tion guided by combined contact and noncontactmapping, Circulation 115.
[37] G. Saupin, C. Duriez, S. Cotin, Contact modelfor haptic medical simulation, in: Fourth Inter-national Symposium on BioMedical Simulation(ISBMS’08), London, UK, 2008.
16