A formalism to describe concurrent non-deterministic ... KONINKLIJKE BIBLIOTHEEK, DEN HAAG Huis in...
51
A formalism to describe concurrent non-deterministic systems and an application of it by analysing systems for danger of deadlock Huis in 't Veld, R.J. Published: 01/01/1988 Document Version Publisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers) Please check the document version of this publication: • A submitted manuscript is the author's version of the article upon submission and before peer-review. There can be important differences between the submitted version and the official published version of record. People interested in the research are advised to contact the author for the final version of the publication, or visit the DOI to the publisher's website. • The final author version and the galley proof are versions of the publication after peer review. • The final published version features the final layout of the paper including the volume, issue and page numbers. Link to publication Citation for published version (APA): Huis In T Veld, R. J. (1988). A formalism to describe concurrent non-deterministic systems and an application of it by analysing systems for danger of deadlock. (EUT report. E, Fac. of Electrical Engineering; Vol. 88-E-200). Eindhoven: Technische Universiteit Eindhoven. General rights Copyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright owners and it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights. • Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal ? Take down policy If you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediately and investigate your claim. Download date: 17. Jun. 2018
Transcript of A formalism to describe concurrent non-deterministic ... KONINKLIJKE BIBLIOTHEEK, DEN HAAG Huis in...

A formalism to describe concurrent non-deterministicsystems and an application of it by analysing systems fordanger of deadlockHuis in 't Veld, R.J.
Published: 01/01/1988
Document VersionPublisher’s PDF, also known as Version of Record (includes final page, issue and volume numbers)
Please check the document version of this publication:
• A submitted manuscript is the author's version of the article upon submission and before peer-review. There can be important differencesbetween the submitted version and the official published version of record. People interested in the research are advised to contact theauthor for the final version of the publication, or visit the DOI to the publisher's website.• The final author version and the galley proof are versions of the publication after peer review.• The final published version features the final layout of the paper including the volume, issue and page numbers.
Link to publication
Citation for published version (APA):Huis In T Veld, R. J. (1988). A formalism to describe concurrent non-deterministic systems and an application ofit by analysing systems for danger of deadlock. (EUT report. E, Fac. of Electrical Engineering; Vol. 88-E-200).Eindhoven: Technische Universiteit Eindhoven.
General rightsCopyright and moral rights for the publications made accessible in the public portal are retained by the authors and/or other copyright ownersand it is a condition of accessing publications that users recognise and abide by the legal requirements associated with these rights.
• Users may download and print one copy of any publication from the public portal for the purpose of private study or research. • You may not further distribute the material or use it for any profit-making activity or commercial gain • You may freely distribute the URL identifying the publication in the public portal ?
Take down policyIf you believe that this document breaches copyright please contact us providing details, and we will remove access to the work immediatelyand investigate your claim.
Download date: 17. Jun. 2018

A Formalism to Describe Concurrent Non-Deterministic Systems and an Application of it by Analysing Systems for Danger of Deadlock by R.J. Huis in 't Veld
EUT Report 88-E-200 ISBN 90-6144-200-1
August 1988
ISSN 0167- 9706
Eindhoven University of Technology Research Reports
EINDHOVEN UNIVERSITY OF TECHNOLOGY
Faculty of Electrical Engineering
Eindhoven The Netherlands
Coden: TEUEDE
A FORMALISM TO DESCRIBE CONCURRENT NON-DETERMINISTIC SYSTEMS
AND
AN APPLICATION OF IT BY ANALYSING SYSTEMS FOR DANGER OF DEADLOCK
by
R.J. Huis in 't Veld
EUT Report 88-E-200
ISBN 90-6144-200-1
Eindhoven
August 1988
CIP-GEGEVENS KONINKLIJKE BIBLIOTHEEK, DEN HAAG
Huis in 't Veld, R.J.
A formalism to describe concurrent non-deterministic systems and an application of it by analysing systems for danger of deadlock / by R.J. Huis in It Veld. -Eindhoven: University of Technology, Faculty of Electrical Engineering. - Fig. - (EUT report, 155N 0167-9708, 88-E-200) Met lit. opg., reg. ISBN 90-6144-200-1 5150 520.6 UDC 510.5 NUGI 811 Trefw.: procesalgebra.

A FORMALISM TO DESCRIBE CONCURRENT NON-DETERMINISTIC SYSTEMS
AND
AN APPLICATION OF IT BY ANALYSING SYSTEMS FOR DANGER OF DEADLOCK
R.J. Huis in 't Veld Faculty of Electrical Engineering,' Digital Systems Group (EB)
Eindhoven University of Technology P.O. Box 513, 5600 MB Eindhoven, The Netherlands
Abstract: A formalism is introduced to describe the behaviour of systems built out of concurrently running mechanisms. The central notion in this formalism is called process. It is used to specify the behaviour of these systems. Furthermore, criteria to differentiate between specifications are discussed. Each of these criteria will be formalized by an equivalence relation on processes. Finally, the formalism is used to analyse the behaviour of systems for deadlock-like properties. Several concepts describing these properties are introduced. It appears that a system may show one of these properties, while its components do not. For this purpose, theorems are derived. They state the conditions under which larger systems may be built out of smaller ones, without introducing deadlock-like properties.
- iii -

CONTENTS
Preface 1
1. The Formalism
1.0 Introduction 3 1.1 Process 3 1.2 Concurrency 8 1.3 Equivalence relations on processes 10 1.4 Properties of Bisimulation Equivalence 19
2. Deadlock
2.0 Introduction 23 2.1 Locked and Lockfree 25 2.2 Construction of lockfree systems 29 2.3 A substitution property 32 2.4 Deadlockfree 37
3. Other Concepts
3.0 Introduction 39 3.1 Disablefree 39 3.2 Ignorefree 40
4. Conclusions 42
5. References 43
- iv -

PREFACE
CCS (a Calculus of Communicating Systems) [6], CSP (Communicating Sequential
Processes) [3] and Trace Theory [5] have been evolved to formalize the
reasoning about systems built out of concurrently running mechanisms. Each of
these formalisms shows how abstract specifications of the behaviour of a
system and its components may be given. Then, properties of a system may be
expressed by predicates over these specifications.
In this report. we combine the mayor features of CCS and Trace Theory into a
new formalism. The central notion in this formalism is called process. It is
used to specify the behaviour of systems bull t out of concurrently running
mechanisms. Also, criteria to differentiate between the behaviour of these
systems are discussed. Each of these criteria is formalized by an equivalence
relation on processes. Furthermore, we apply the formalism to analyse systems
for danger of deadlock. A concept in terms of our formalism is presented that
corresponds to our intuitive meaning of deadlock. It appears that a system
may have danger of deadlock while its components do not. For this purpose, a
theorem is derived. It states the conditions under which larger deadlockfree
systems may be built out of smaller ones. Finally, we treat other, to
deadlock related propertles of systems.
We conclude this preface with some notational conventions used throughout
this report. Slightly unconventional notations are used for variable binding
constructs. Universal quantification is denoted by (81: d: E) where B is the
quantifier, 1 is a list of bound variables, d delineates the range of each of
these variables, and E is the quantified expression. Similarly, (E 1: d: E)
denotes existential quantification. Furthermore, we use in the same way the
quantifiers !..! and 0 to denote continued unification and continued
intersection respectively.
Given two sets X and Z. The proof that X is a subset of Z (X ~ Z) may run
like: X ~ Y and Y ~ Z for some set Y. Henceforth, we record such proofs as
follows:
- 1 -
x ~ { hint why X ~ Y }
Y ~ { hint why Y ~ Z }
Z
- 2 -
1. THE FORMALISM
1. 0 Introduction
The behaviour of a system built out of concurrently running mechanisms may
show some unwanted aspects. To determine whether these aspects are present in
the behaviour of a system, a formalism is used that is based upon CCS and
Trace Theory. In this chapter the formalism is presented.
We start by introducing the notion process. At first, a process is used to
describe the behaviour of a mechanism. Later on, this is generalized to
describe the behaviour of a system built out of concurrently running
mechanisms. Then, we continue by discussing criteria to differentiate between
the behaviour of systems. Each of these criteria is formalized by an
equivalence relation on the universe of processes. Finally, some properties
are derived for the strongest of these relations.
1.1 Process
We postulate two disjoint infinite sets Id and II. The elements of Id are
called behaviour-names. Elements and subsets of 1\ are called action-symbols
and alphabets respectively.
Let A be a set. The set of all finite-length sequences of elements of A is
denoted by A*. The empty sequence is denoted by c. Elements of 11* are called
traces.
Small and large letters near the beginning of the Latin alphabet are used to
denote action-symbols and alphabets respectively, and small and large letters
near the end of the Latin alphabet are used to denote traces and
behaviour-names respectively.
Furthermore, we denote by Exp the set of expressions defined by the following
syntax in Backus-Naur Form:
- 3 -

E .. = a:E
E + E
X
NIL
- 4 -
where a and X range over A and Id respectively. NIL is a special symbol that
is not an element of A or Id. Additionally, we assume that for expressions
Ei, i" 0, the infinite sequence EO + E1 + E2 + ... (abbreviated by
(+i:i .. O:Ei» is also an expression.
A transition-function is a partial function from Id to Exp. Frequently, we
write a transition-function 'Y as a set of pairs {(X,'Y(XllIXe dom('Y)}. For
transition-functions 'YO and 'Y1 with disjoint domains, we denote by 'YO u 'Y1
the transition-function that corresponds to the union of the with 'YO and 'Y1
associated sets of pairs.
We now have a sufficient base to introduce the notion process. Assume E to be
an expression, A to be an alphabet and 'Y to be a transition-function. We call
the triple <E,A,'Y> a process if and only if the elements of A are the only
action-symbols that occur in E and in the expressions in the range of 'Y. To
refer more easily to the three components that make up a process P,
P = <E,A,'Y>, we denote by rP the expression E, by ~P the alphabet A and by uP
the transition-function 'Y.
We attach an operational semantics to processes, by defining for each
action-symbol a the binary relation ~ on the universe P of processes.
Definition 1.1.0
For each action-symbol a, we denote by ~ the smallest binary relation on P
satisfying:
i) (a:E,A,'Y) ~ (E,A,'Y)
ii) if (EO,A,'Y) ~ (E,A,'Y) or (E1,A,'Y) ~ (E,A,':!)
then (EO + E1,A,'Yl ~ (E,A,'Yl
iii) if ('Y(X),A,':!) ~ (E,A,'Y) then (X,A,':!) ~ (E,A,'Y)
where E, EO and E1 are expressions, A is an alphabet, X is a behaviour-name,
and 'Y is a transition-function.
(End of Definition)
We continue by extending the binary relations on the universe of processes
from action-symbols to traces.

- 5 -
Definition 1. 1. 1 t For a trace t, we recursively define the binary relation --7 on P as follows
i) P ---E... P
ii) For trace s and action-symbol a:
PO ~ P2 = (EP1:P1 e P:PO ~ P1 A P1 ~ P2)
(End of Definition)
The operational semantics we have attached to a process P may be expressed
graphically. The binary relations a --7 , a eA. and the set Q,
Q = {P' I (Es: s e ~p·:P ~ P' )}, specify a rooted, directed, connected graph.
This graph is called the state graph of P, and it is defined by:
There exists a one to one correspondence between the vertices of the
graph and the processes in Q. The root of the graph corresponds to P.
The arcs of the graph are labelled by action-symbols. There exists an
arc labelled by action-symbol a from the vertex associated with
process PO to the vertex associated with process P1 if and only if
PO ~ P1.
When drawing the state graph of a process, the root is denoted by o.
Furthermore, we label some of the vertices of the graph sometimes by their
corresponding processes.
Example 1.1.2
Let ~ be the transition-function {(W,a:X), (X,c:Y + d:Z), (Y,b:W),(Z,NIL)}.
Furthermore, let P be the process <W,{a,b,c,d},~>.
The state graph of P is presented in Figure 1.1.0, where the processes PO, P1
and P2 are defined by: PO = <X,{a,b,c,d},~> P1 = <Y,{a,b,c,d},~> P2 = <Z,{a,b,c,d},~>
01°P
c d .~. -----?
P1 PO P2
Figure 1.1.0: The state graph of process P.
(End of Example)
We call two state graphs GO and G1 isomorfic if there exists a bijection f

- 6 -
from the vertices of GO to the vertices of Gl such that:
The root of GO is mapped into the root of Gl.
The labelled arcs that are drawn between any two vertices VO and Vl in
GO are the same labelled arcs that are drawn between the vertices
f(VO) and f(Vl) in Gl.
Notice that two processes have the same operational semantics if their state
graphs are isomorfic.
A process P may be used to describe the behaviour of a mechanism as follows:
The vertices of the state graph of P correspond to the states the
mechanism may be in. The action-symbols in i1,P correspond to actions
the mechanism may perform. We assume that these actions have no
duration and that they do not overlap.
Initially the mechanism is in the state that corresponds to [Po
Let A be a state in the state graph of P, and let the mechanism be in
in this state. Then, the mechanism can only perform next one of the
with the labels of the outgoing arcs of A associated actions. Assume A
has an outgoing arc that is labelled by action-symbol a. After
performing the action associated with a, the mechanism will be in a
new (perhaps the same) state. This is one of the states to which A has
an outgoing arc that is labelled by a.
Let G be a rooted, directed, connected graph in which the arcs are labelled
by action-symbols. A process with G as state graph is easily constructed.
Define an injective function f from the vertices of G to Id. Assume that the
root of G is mapped into Z. A process PO has G as state graph if it
satisfies:
[PO = Z
aPO contains at least the action-symbols that label the arcs in G.
·dom(nPO) = rng(f)
For each X, X E rng(f), nPO(X) denotes an expression that is obtained
by placing in a sequence of all the elements of the set
{a:Y!a E A AYE rng(f)
A there is an arc labelled a from f- 1 (X) to f- 1(y)}
between each two successive elements the + operator. If this set is
empty nPO(X) is NIL.
- 7 -
Let P be a process. If P can be obtained by applying the above construction
method to its state graph, P is said to be in normal form.
We call two processes PO and P1 identical, denoted by PO = P1, if they have
the same alphabets and the same operational semantics. Since the operational
semantics of a process is fully captured by the process's state graph, two
processes are identical if they have the same alphabets and isomorfic state
graphs. Clearly, for each process in P there exists a process in normal form
that is identical to it. So, without loss of generality, we confine ourselves
in the sequel to processes in normal form. Therefore, we postulate a largest
possible set Q of processes in normal form. Each two different elements in Q
have disjoint behaviour-names and they are not identical. Henceforth, we
assume that a process either is an element of Q or denotes its identical
element in Q. Moreover, sets of processes are subsets of Q.
A consequence of restricting ourselves to processes in Q is that the state
graph of a process does not contain two or more vertices with which identical
processes are associated.
Each element of Exp is built out of action-symbols, behaviour-names and NIL
that are glued together by the operators: and +. In Definition 1.1.0 we have
given the semantics of these operators. Similar operators may be introduced
on processes.
Definition 1.1.3
(0) For each process P, P = <E, A, ':I>, and for each action-symbol a, we
denote by a:P the process in Q that is identical to <a:E,A u {a},':I>.
(1) Let PO and P1 be processes such that PO = <EO,A,':IO>, P1 = <El,A,':I1>
and the behaviour-names occurring in PO and Pl are disjoint. We
denote by PO + P1 the process in Q that is identical to
<EO + E1,A,':IO u ':11>.
(End of Definition)
Let PO and Pl be processes, and let a be an action-symbol. With a: PO a
mechanism may be associated that initially performs the action that
corresponds to a, and whose successive behaviour is specified by PO. With
PO + P1 a mechanism may be associated that has an initial choice: Either to
behave as specified by PO or to behave as specified by Pl.

- 8 -
Property 1. 1. 4
Let PO and P1 be processes with the same alphabets. Furthermore, we denote
for each alphabet A by NULLA the process in Q that is identical to <NIL,A,0>.
Then,
(0) PO + P1 = P1 + PO
(1 ) PO + NULLl!.PO = PO
(End of Property)
1. 2 Concurrency
Consider two mechanisms. One of these mechanisms, called the sender,
repeatedly receives via a channel co a message from its environment and then
puts it on channel Cl. The other mechanism, called the receiver, repeatedly
receives a message put on channel Cl and sends it to its environment by
placing it on channel C2. The precise behaviour of the sender and the
receiver is specified by the processes Sand R respectively.
S = <SO, {co,cil, {(SO,co:S1), (S1,Cl:SO)}>
R = <RO,{Cl,C2},{(RO,Cl:Rl + cl:R2), (R1,C2:RO), (R2,C2:R3), (R3,NUL)}>
In Sand R we have used the names of the channels as action-symbols. They
denote the actions of the sender and the receiver regarding these channels
In order to state anything about the behaviour of the Sender-Receiver System,
we consider a system built out of concurrently running mechanisms to be a
mechanism as well. Consequently, the behaviour of a system has to be
specified by a process. Since such a process is related to the processes
describing the behaviour of the system's components, it is derived from these
processes.
We introduce on the universe of processes a new infix operator I, called the
composition operator. The semantics of this operator is presented in the
following definition.

- 9 -
Definition 1.2.0 (composition)
For each a, a E A, we denote by ~ the smallest binary relation on
{pIQiP E Q A Q E Q} satisfying:
i) if <EO,AO,~O> ~ <E,AO,~O> and a ~ A1 then
<EO,AO,~0>I<E1,A1.~1> ~ <E,AO,~0>I<E1,A1,~1>
ii) if <E1,A1,~1> ~ <E,A1,~1> and a ~ AO then
<EO,AO,~O>I<El,Al,~l> ~ <EO,AO,~0>I<E,A1,~1>
iii) if PO ~ PO' and P1 ~ Pl' then POlp1 ~ PO'IP1'
where E, EO and El are expressions, AO and A1 are alphabets, and ~O and ~1
are transition-functions.
(End of Definition)
Similar to Definition 1. 1. 1, we extend the above defined relations from
action-symbols to traces.
Let P and Q be processes. As we have seen
a E A, on the set {POIQOiPO E Q A QO E Q A
a for processes, the relations ~,
(Es:s E A-:pIQ ~ POIQO)} specify
a graph G with plQ as root. In the sequel, we denote by plQ the process in Q
that has G as state graph and gP U gQ as alphabet.
Applying the above to our Sender-Receiver System, SiR denotes the process:
<Z, {cO,CI,C2}, { (Z,co:QO), (QO,ct:Q1 + c1:Q2), (Ql,co:Q3 + C2:Z)
,(Q2,co:Q4 + C2:QS), (Q3,C2:QO>, (Q4,C2:Q6), (QS,co:Q6)
, (Q6,NIL)}>
Notice that SiR does not completely specify the behaviour of the
Sender-Receiver System. For instance, according to SiR there is no time laps
between the moment the sender puts a message on CI and the moment the
receiver removes it from ct. In real practice, this transfer of messages can
not be instantaneous. If the system is in the state associated with Q1, it
may either perform co or C2. These actions will be performed by different
components of the system, and they involve interaction with the system's
environment. If the environment has no objections, they may be performed
simultaneously. Although we are aware of these kinds of limitations, we take
them for granted in this report.

Property 1. 2. 1
(0) POlp1 = P11PO
(1) POl (P1In) = (POlpll1P2
(end of Property)
- 10 -
(commutative)
(associative)
The composition operator is not idempotent. For instance, take process P,
P = <X,{a,b,c},{(X,a:XO + a:X2),(XO,b:Xll,(X1,NIL), (X2,c:X1))>. pip is the
process <Z,{a,b,c},{(Z,a:ZO + a:Z1 + a:Z2),(ZO,b:Z1), (Zl,NIL),(Z2,c:Z1)}>.
Obviously, the state graphs of P and pip are not isomorfic.
Since the composition operator is commutative and associative, composition
may be extended to sets of processes. Let X be a set of processes. We denote
by C(X) the process obtained by composing the elements in X. By definition,
C(,,) denotes the process NULL,,' In this report, we implicitly assume that
composition is only applied on sets of processes that do not contain two or
more processes with the same alphabets. Consequently, the next property is
only defined for those sets X and Y of processes such that X, Y and X u Y
satisfy this condition.
Property 1. 2. 2
Let X and Y be sets of processes such that X n Y = ". Then
C(X)IC(Y) = C(X u Y)
(End of Property)
1.3 Equivalence relations on processes.
Consider a system S specified by a process P. This system may be embedded in
a system T. S may perform two types of actions regarding T. First, the
actions by which S and T interact. These actions are called the observable
actions of S regarding T. Second, all the other actions S may perform. These
are the actions by which the components of S interact with one another, and
the actions by which S interacts with the environment of the system composed
of Sand T. They are called the unobservable actions of S regarding T.
By interacting with S, T only experiences a part of the behaviour of S.
Namely, the observable actions of S regarding T. This experienced behaviour
can be described by process P. But P specifies in detail the unobservable
actions of S regarding T. Clearly, the nature of these unobservable actions
are not important for the specification of the behaviour of S as it is

- 11 -
experienced by T. Only their occurrences matter. So, instead of P, we may use
the process P in which all action-symbols that denote the unobservable
actions are replaced by the same, fresh action-symbol.
The above shows how to abstract from details in a process. We formalize it by
introducing the operation hiding on processes. Therefore, A is extended by a
special action-symbol T, T f A. The set A v {T} is denoted by A . T
In the
sequel, traces are elements
the notion of process is
of A • and alphabets T
are subsets of A . Moreover, T
modified a little. All we have stated about
action-symbols holds also for T, except that a T may never occur in the
alphabet of a process. The universe of processes Q is extended by a maximal
set of processes in normal form such that T occurs at least once in each of
these processes. Furthermore, each two different processes in this set are
not identical and have disjoint behaviour-names. The extended universe of
processes is denoted by Q . T
Definition 1.3.0 (hiding)
Let P be a process, and let A be an alphabet.
We denote by P~A the process
~ is the transition-function
in Q that is identical to <rP,~P A A,~>, where T
obtained from nP by replacing in each expression
in the range of nP each occurrence of an action-symbol in ~P\A by a T.
(End of Definition)
Informally, we may associate with a process in which T-symbols occur a
mechanism that is capable of performing some unspecified actions.
To facilitate our discussion of processes, we no longer distinguish between
processes and the mechanisms they specify.
The above suggests a criterion to differentiate between two systems T and U.
T and U are the same regarding a set A of actions if and only if each system
that only interacts by the actions in A with T and U respectively experiences
no difference between them. In the sequel, this criterion is formalized by an
equivalence relation on processes. The relation is called bisimulation
equivalence. Preceding its definition, other equivalence relations on
processes are given that at first sight seem to capture our criterion. In
order to do this, the concepts projection and successor-set are introduced
first.
- 12 -
The notion of hiding is extended to traces.
Definition 1.3.1 (projection)
For trace t and alphabet A, we recursively define the projection of t on A,
denoted by ttA, by:
etA = e
(sa) tA = stA
(sa) tA = (stA)a
(End of Definition)
for trace s and action-symbol a such that a ~ A.
for trace s and action-symbol a such that a e A.
Informally, the projection of trace t on alphabet A denotes the trace
t in which all occurrences of action-symbols not in A are removed.
Definition 1.3.2 (successor-set)
For a process P, the successor-set of P, denoted by Succ(P), is the set of
action-symbols
{ala e aP A (Ep':p'e Q : (Et:t e (aP v {T})* A ttaP = a :P ~ P' »} T
(End of Definition)
Informally, for a process P we denote by Succ(P) the maximal subset of non T
actions that the process may perform next.
Let P and P' be processes, and let s be a trace in aP*. In the sequel we t) s abbreviate (Et:t e (aP v {T})* A ttaP = soP ~ P' by P ==+ P'.
We continue with an enumeration of a number of equivalence relations on
processes. These relations are only defined between processes with the same
alphabets.
Throughout the remainder of this section we assume PO and P1 to be processes
with the same alphabets. Moreover, all non '[-actions are considered to be
observable actions.
Intuitively, a first approach to distinguish between processes is to look at
finite-length sequences of actions. Each of these sequences specifies the
actions that a process may consecutively engage itself in from the moment it
starts operating. Then, two processes may be called equivalent if they have
the same set of finite-length sequences of actions. This equivalence relation
is known as trace equivalence, and it is formalized in the following

- 13 -
definition.
Definition 1.3.3 (trace equivalence)
PO and Pl are called trace-equlvalent, denoted by PO '" Pl, if and only if 1
the following holds
(BP,s:P e Q As e gPO· A PO ~ P:(EP':P'e Q A Pl ~ P':true)) ... ... A (BP',s:P'e Q AS e aPl· A Pl ~ P': (EP:Pe Q A PO ~ P:true)) ... ...
(End of Definition)
Consider the state graphs of the processes PO and Pl (Figure 1.3.0).
PO Pl 0 0
Y"'z La • • •
Ib Ib • •
Figure 1.3.0: The state graphs of processes PO and Pl.
Contrary to process Pl, process PO may never be able to perform action b
after having performed action a. Easily, a system can be found that
distinguishes between these trace equivalent processes. This suggests the
following equivalence relation.
Definition 1.3.4 (fallure equivalence)
PO and Pl are called failure equivalent, denoted by PO ~ Pl, if and only if
the following predicate holds:
(BP,s,X:P e Q ... A S e gPO· A PO ~ P A X ~ A A X n Succ(P) = 0
: (EP':P'e Q A Pl ~ P':X n Succ(P') = 0)) ... A (BP',s,X:P'e Q AS e aPl· A Pl ~ P' A X ~ A A X n Succ(P') = 0 ...
: (EP:P e Q A PO ~ P:X n Succ(p) = 0)) ... (End of Definition)

- 14 -
Figure 1.3.1 shows the state graphs of processes PO and Pl.
PO Pl
;/aI~ 0
;/ ~ • • • • •
bi Ci bi~ bi iC
• • • • • • Figure 1. 3.1: The state graphs of processes POandP1.
These processes are failure equivalent. After they both perform action a, PO
may still choose between band c. Pl, however, has no choice. A system that
can monitor all the observable actions a process may perform next
distinguishes between these processes. This observation yields the following
equivalence relation.
Definition 1.3.5 (successor equivalence)
PO and Pl are successor equivalent, denoted by PO 6 Pl, if and only if the
following holds:
(BP,s:P E a A s E aPO· A PO ~ P T
: (EP':P'E a A Pl ~ P':Succ(P) = Succ(P' I)) T
A (BP',s:P'E a AS E aPl- A Pl ~ P' T
: (EP:P E 0T A PO ~ P:Succ(P) = Succ(P')))
(End of Definition)
Consider the state graphs of the processes PO and Pl. (Figure 1.3.2).
PO Pl
;/0~ 0
;/~ • • • •
bi bi~ bi bi~ • • • • •
di ei ei di
• • • • Figure 1.3.2: The state graphs of processes PO and Pl.
•
In spite of PO 6 Pl, we can think of a reason to differentiate between these
processes. Suppose we have a system that interacts via the actions a, b, c, d

- 15 -
and e with either process in the following way:
The interactions have no duration and they do not overlap. Moreover,
an interaction takes place if both the process and the system agree
on it.
Fi r st, the sys t em in t eracts with a process by action a. If the
process is then capable of interacting by action b as well as by
action C, the system wishes to interact by the actions band e
successively. Otherwise, the system
actions band d successively.
wishes to interact by the
If the system interacts with PO, it will encounter no problems. Yet by
interacting with PI a problem may arise. Suppose the system wishes to
interact by a, band e successively. The last interaction will never take
place, since PI only wishes to interact by d. The above suggests the
following equivalence relation.
Definition 1.3.6 (k-equivalence & ~-equivalence) For k, k i?:: 0,
k-equivalent) by:
we recursively define PO '" P1 k
PO '" P1 always holds o
For n, n i!! 1,
PO '" Pl n
=
( pronounce: PO and P1 are
(BP, s: P e Q II S e aPO· II PO ~ P: (EP' : P' e Q 1\ PI ~ P' : P '" P')) T T n-l
II
(BP' ,s: P' e QT
1\ S e aP1- 1\ P1 ~ P' : (EP: P e QT
1\ PO ~ P: P '" P' II n-l
PO and Pl are called i-equivalent, denoted by PO i PI, if and only if for all
k, k >: 0, PO '" PI. k
(End of Definition)
The following property shows the relations between the various equivalence
relations introduced so far.
Property 1.3.7
(0) PO i} Pl .. PO "'1Pl (1) PO ~ P1 .. PO ~ P1
(2) PO '" P1 2
.. PO 6 P1
(3) PO '" PI = (Bi: 0 '" i S k:PO '" Pl) , for k >: O. k I

- 16 -
Proof
The proof of (0) through (2) follows immediately from the definitions.
We only show, by induction on k, that (3) holds.
Base:For k = 0 and k = 1 the proof is trivial.
Step:For k = n + I, n ~ I, we have:
po" not
PI
= { Definition " k }
(BP,s:P e Q .. A S e aPO· 1\ PO ~ P: (EP' : P' e Q A PI ~ P' : P " P' » .. n
A (BP',s:p'e Q .. A S e aP1· A PI ~ P': (EP:P e Q 1\ po ~ P:P" P'» .. n
= {
= {
induction hypothesis }
po" not
PI
A (BP,s:Pe Q 1\ S e aPo· A .. A (BP',s:P'e Q 1\ S e aP1· ..
Definit ion " k
}
PO" PI A PO" PI n+l n
= { induction hypothesis}
PO ~ P: (EP' : P' e Q .. 1\
1\ PI ~ P' : (EP: P e Q ..
PO" PI A (Ai:O '" 1 :s n:PO "Pll n+l - 1
= { predicate calculus }
(Bi:O '" i :s n + l:PO " PI) I
(End of Proof and Property)
PI ~ P' : P" P' ) ) n-l
1\ PO ~ P: P" P' » n-l
Notice that each example preceding the definition of an equivalence relation
ensures that the implications in (0) through (3) may not be replaced by
equalities.
Referring to the constructive way in which i-equivalence is defined, it may
be asked whether there exists a simpler, recursively defined equivalence
relation with almost the same power of expression. Indeed, such a relation,
called bisimulation equivalence, exists.
Definition 1.3.8 (bislmulation)
A subset ~ of Q x Q is called a bisimulation if and only if for each pair .. .. (PO,PI) in ~ the following holds:
(BP,s:P e Q .. A S e ilPO· A PO ~ P: (Ep':P'e Q .. A PI ~ P': (P,P') e ~»
(AP' s:P'e Q AS e ilPI· A PI ~ P': (EP:P e Q 1\ PO ~ P: (P,P') e ~» _. 1: 1:.
(End of Definition)

- 17 -
Definition 1.3.9 (bisimulation equivalence)
PO and P1 are bisimulation equivalent, denoted by PO E P1, if and only if
there exists a bisimulation ~ such that (PO,P1) e ~
(End of Definition)
Bisimulation equivalence is a stronger equivalence relation on processes than
l-equivalence. Yet, a large class of processes exists for which they are the
same. The following theorem clarifies this. Preceding it, we first have to
introduce the notion non-divergent.
A process P is called non-divergent,
if for each s e aP' the set {POlpO e
Theorem 1. 3.10
denoted by non-divergent(P),
Q A P ~ PO} is finite. .,.
For all non-divergent processes PO and P1 in Q , we have .,. PO l P1 = PO E P1 - -
(End of Theorem)
if and only
The proof of this theorem is based upon the validity of two lemmata.
Lemma 1. 3. 11
Let P and P' be non-divergent processes.
Furthermore, let po and PI denote the sets of processes:
po = {POlpO e Q A (Es:s e ~P':P ~ PO)} .,. pI = {P11p1 e Q A (Es:s e ~P':P'~ P1)} .,.
Then, the set ~, ~ = {(PO, P1) I (PO, Pll e po x pI A PO ~ Pll}' is a
bisimulation.
Proof
We first observe that, since P and P' are non-divergent, the elements in po
and pI are also non-divergent.
The symmetry of the definition of bisimulation ensures that the following
derivation is sufficient to prove the lemma.
(PO, Pl) e ~
= { Definitions: ~ and l-equivalence }
PO e po A P1 e pI A (Bk:k ~ O:PO ~kP1)
~ { predicate calculus, Definitions: ~k' po and PI }
(Bk: k ~ 1:
: (BPO',s:PO'e po A S e ~PO' A PO ~ PO'
: (EP1' : PI' e PI A P1 ~ P1': PO' ~ P1' ))) k-l

- 18 -
= { P1 is non-divergent, Property 1.3.7.3 }
(BPO' ,s:PO'e po A S e aPO*A PO ~ PO'
: (EP1':P1'e pi A P1 ~ P1': (Bk:k ~
= { Definition ~ }
(BPO' ,s:PO'e po A S e ~PO·A PO ~ PO'
l:PO'.. P1'») '-1
: (EP1' : P1' e pi A P1 ~ P1' : (PO' ,P1') e ~»)
(*)
Notice that the equality marked by (*) boils down to stating that the
universal quantification may distribute over the existential quantification.
This is allowed, since the dummy P1' in the existential quantification ranges
over a finite set of processes (due to our assumption of non-divergence) and
Property 1.3.7.3 holds.
(End of Proof and Lemma)
Lemma 1.3.12
Let ~ be a bisimulation. Then, for each pair (PO,P1) in ~ we have PO l Pl.
Proof
According to the Definition of k-equivalence, it is sufficient to demonstrate
for each pair (PO,Pl) in ~ that (Bk:k ~ 0: PO
We prove it by mathematical induction on k.
Let (PO, PO e ~
'" Pl). k
Base: For k = 0 the proof is trivial, since each two processes are
O-equi valent.
Step:For k = n + 1, n ~ 1, we have
(PO, Pll e ~
= { Definition bisimulation }
A PO ~ PO' (BPO',s:PO'e Q~ A S e aPO·
: [EP1':P1'e Q A Pl ~
~ Pl':(PO',Pl') eM)
A (BP1' ,s:Pl'e Q A S e !!oPl· A P1 ~ Pl' ~
: (EPO':PO'e Q~ A PO ~ PO': (PO',Pl')
~ { induction hypothesis }
(BPO',s:PO'e Q~ A S e
: (EP1' : Pl' e Q ~
!!oPO· A PO ~ PO'
A P1 ~ Pl':PO'''' P1'»
A (BP1',s:Pl'e Q AS e ~
:(EPO':PO'eQ ~
= { Definition'" }
PO '" Pl n+1
k
(End of Proof and Lemma)
n
ePt- A PI ~ PI'
A PO ~ PO':PO'" Pl'» n
e ~»
- 19 -
1.4 Properties of Bisimulalion Equivalence
In this section we elaborate on bisimulation equivalence. Some of the
properties treated here may be extended to the other equivalence relations.
We start with the introduction of the notion after.
Definition 1.4.0 (after)
Let P be a process.
We denote by after(P) the set of
after(P) = {SiS e Qy A (Et:t e
(End of Definition)
processes defined t gP':P ~ S)}
Property 1. 4.1
For processes P and p'. such that P ~ P' , we have
(0) a:P B a:P' for action-symbol a, a
(1) nA B P' tA for alphabet A, A ~ A . y
(2 ) piS ~ p'IS for process S, S e Q. y
Proof
by
eA. y
To prove (0) through (2 l, we have to find for each case U), O:s i :s 2, a
bisimulation
(piS, p'IS) e B2
B I
such that (a:P,a:P') e Bo
' (PtA, P' tAl e B , and
We give B , Band B2
. It is left to the interested reader to verify that o , they satisfy.
There exists a bisimulation B, B ~ after(P) x after(P'), such that
(P,P') e B. Then, we define:
BO= B u {(a:P,a:P')}
B,= {(POtA,P1tA) I (PO,P1) e B}
B2= {(POISO,P1IS0) I (PO,P1) e B A SO E after(S)}
(End of Proof and Property)
Let P, P' and S be processes such that P 7l P'. Generally, we do not have
P + S B P'+ S. This is shown in the next example.

- 20 -
Example 1. 4. 2
Let PO and Pl be processes with alphabet {b} and whose state graphs are drawn
in Figure 1.4. O.
r-·.·.-.·--· .. -.----.--··i 'PO 'Pl
IT r--·Ib • _. __ ...... _ ...... _ .. __ ... _._.J •
Ib I • . ... _ .... _ ...... __ .. _ ......... _---_.j
Figure 1.4.0: The state graphs of processes PO and Pl.
There exists a bisimulation such that PO B P1. This bisimulation is made
explicit in Figure 1. 4. 0 by drawing for each pair of processes in the
bisimulation a dotted line between the with these processes corresponding
vertices.
Consider, furthermore, the process S, S: <Z,{c},{(Z,c:ZO), (ZO, NIL)}>. The
state graphs of PO + Sand Pl + S are drawn in Figure 1.4.1.
PO + S Pl + S
Yj 0
.~ c b c
• • Figure 1.4.1: The state graphs of processes PO + Sand Pl + S
Consider the vertex that can be reached in the state graph of PO + S by
performing an initial T action. The process associated with that vertex is
not bisimulation equivalent with any of the processes that correspond to the
vertices of the state graph of Pl + S. Hence, ,(PO ~ Pl).
(End of Example)
Property 1.4.3
Let PO and Pl be processes, and let A be an alphabet such that aPO n aPl ~ A.
We have:
(POlpl)tA ~ (POtA)I(PltA)
Proof
A bisimulation B that ensures the above is:

- 21 -
B = {«plp'ltA, (PtA)I(P'tA»lp e after(PO) A P'e after(Pll}
We will prove that this is indeed a bisimulation.
Let TO and TO' be elements of after(PO), let T1 and n' be elements of
after(P1), and let trace r be an element of A*. We derive
(Toln) tA ~ (TO'ln') tA
= { Definition hiding }
(Es:s e (aTO u aT1)* A stA = r: (TOIT1)
= { Definition composition}
• """"* (TO'ln'»
(Es,t,u:s e (aTO u aT1)* A stA = rAt = staTO A u = staT1
:TO ~ TO' A T1 ~ T1')
= { note }
r e «aTO u an) () A)* A (Et:t e aTO* A ttA rtaTO:TO t = """"* A (Eu: u e an* A utA = rtaT1:T1 ~ T1')
= { Definition hiding }
TO' )
r e «aTO u an) () A)* A TOtA rtaTO, TO' tA A T1tA rtaT1, T1' tA
= { r e A*, Definition composition}
(TOtAlntA) ~ (TO' tAln' tAl
Note
For traces t and u such that t e aTO*, u e aT1*, ttA = rtaTO and utA = rtaT1,
we clarify the implication:
TO ~ TO' A T1 ~ T1' Are «aTO u aT1) () A)*
(Es:s e (aTO u aT1)* A stA = rAt = staTO A u = staT1 t u :TO ==* TO' A T ==* T1')
Its validity is based upon the following observation. Let qO and q1 be
traces. The set that consists of the symbols out of which qO is composed is
denoted by sym(qO). Similarly, we define sym(q1). Then, we have
=
qOtsym(q1) = q1tsym(qO)
(Eq2:q2 e (sym(qO) u sym(q1»* A sym(q2) = sym(qO) u sym(q1)
:q2tsym(qO) = qO A q2tsym(q1) = q1)
This property is known as the Lift Theorem, and its proof can be found in
[5, p8-9).
- 22 -
The following derivation proves the implication:
TO ~ TO' A T1 ~ T1' Are «9TO u 9T1) n A)
~ { Lift Theorem, ttA = rt9TO, utA = rt9T1 }
(EsO,sl:s0 e (sym(t) u sym(r»- A sl e (sym(u) u sym(r»
:sym(sO) = sym(t) u sym(r) A sym(sl) = sym(u) u sym(r)
A sOtA = sltA = r A sOtsym(t) = t A sltsym(r) = u
Are «9TO u 9T1) n A)- A TO ~ TO'A T1 ~ T1'»
~ { Lift Theorem, set-calculus, 9TO n 9T1 ~ A }
(Es2:s2 e (9TO u 9T1)- A s2tA = rAt = S2t9TO A u = s2t9T1
:TO ~ TO' A T1 ~ T1')
(End of Proof and Property)
Property 1. 4. 4
Let PO, P1, SO and Sl be processes such that 9PO n ~SO = ~P1 n 9S1.
Furthermore, let AO and A1 be alphabets such that 9PO n 9S0 ~ AO ~ ~PO n ~P1,
~PO n 9S0 ~ A1 ~ gSO n 9S1, POtAO ~ P1tAO and SOtA1 B SltA1. Then
(POISO)t(AO u A1) ~ (P1IS1)t(AO u A1)
(POISO)t(AO u A1)
~ { ~PO n ~SO ~ AO u A1, Property 1. 4.3 }
POt(AO u A1)ISOt(AO u A1)
~ { (AO u A1) n 9PO = AO, (AO u A1) n 9S0 = A1 }
(POtAO) I (SOtA1)
~ { POtAO ~ P1tAO, SOtA1 ~ SltA1, Property 1.4.1.2 }
(P1 tAO) I (Sl tAl)
~ { (AO u A1) n 9PO = AO, (AO u A1) n 9S1 = A1 }
P1t(AO u A1)IS1t(AO u A1)
~ { 9P1 n ~Sl ~ AO u A1, Property 1.4.3 }
(P1IS1)t(AO u Al)
(End of Proof and Property)

2. DEADLOCK
2.0 Introduction
The phenomenon deadlock is treated in many articles and books concerning
parallelism. Informally, it may be defined by:
'Given a set of concurrently running mechanisms. This system has
danger of deadlock if it may stop while some of its components
still want to continue.'
Applying this informal definition to a system built out of concurrently
running mechanisms that never stop, we may phrase that such a system has
danger of deadlock alternatively:
'The system may stop.'
The latter formulation is frequently used in the literature, cf [3).
We continue with an example of a system that has danger of deadlock.
Example 2.0.0
Consider the three processes 00, RO and 50 with ~OO = {aO,bO}, ~RO = {al,bl}
and ~50 = {bO,bl}. Their state graphs are presented in Figure 2.0.0.
QO
[} RO 50 bO 51
o ---=.-=----+l •
Ibl Ibl [} bO • ---=.-=----+l • Ql Rl 52 53
Figure 2.0.0: The state graphs of the processes QO, RO and 50.
The process U is the composition of these processes, i.e. U = C({QO,RO,50}).
U (Figure 2.0.1) may be viewed as the specification of a system consisting of
two work-stations (specified by 00 and RO) and one computer (specified by
50). The action-symbols of ~(C({OO,RO,50}» correspond to the following
actions:
- 23 -

- 24 -
aO: a file is placed in the memory of the work-station specified by QO. bO: a file in the memory of the work-station specified by Ql is updated
by the computer.
al: as aO but for the work-station specified by Rl.
bl: as bO but for the work-station specified by Rl.
The system stops after it has performed six actions. Then, each of the
work-stations has a file in its memory that needs to be updated by the
computer. Hence, the system has danger of deadlock.
(End of Example)
(OOIROISO) (QlIROISO) (OOIROISl) (Ql!ROISll U:
aO bO aO 0 ) . ) . ) .
all all all all
(ooIRqSO) (QqRqsO) (oolRqSll (QqRqSll aO bO aO • ) . ) . ) .
bll bll bll bll
(OOI RO IS2) (Q1 IRO IS2) (QOIRO IS3) (Qq Ro IS3) aO bO aO • ) . ) . ) .
all all all all
aO bO aO • ) . ) . ) . (QOIRl IS2) (QqRqS2) (ooIRqS3) (QqRqS3)
Figure 2.0.1: The state graph of process u.
From the processes 00, RO, SO and U, it can be derived that the system in the
above example has danger of deadlock. This is made explicit in the following
sections.
We conclude this section with some notions needed throughout the remainder of
this report.
First, the notion successor-set is redefined. In section 1. 3. 2 the
successor-set of a process denotes the maximal set of non T actions this

-----,-_ ..
- 25 -
process may perform next. Henceforth, it is defined by:
Succ(P) = {ala e A A (EP':P'e after(P) A P ~ P')} T
We say that P is non-terminating if and only if for each PO, PO e after(P),
Succ(PO) ~ 121.
Let X be a set of processes in which no two elements have the same alphabet.
By restricting ourselves to processes in Q, the definition of composition T
states that with each process T, T e after(C(X)), several sets of processes
may be associated. Informally, each of these sets denotes the states that the
components of system X may be in, while the composite is in state T. In the
sequel, we wish to address each process in after(C(X)) together with all its
corresponding sets of processes. Therefore, the notion after is modified.
Each process U, U e after(C(X)), is assumed to occur as many times in
after(C(X)) as there are 'sets of processes associated with U. Hence,
after(C(X)) becomes a bag. We implicitly assume some sort of one to one
mapping between the processes U in after(C(X)) and the with U associated sets
of processes. Then, e(V,P,X), P e X and Ve after(C(X)), denotes the unique
element of after(P) that occurs in the with V associated set of processes.
2.1 Locked and Lockfree
Throughout the remainder of this report, X is a set of processes and P is an
element of X. Furthermore, only processes Q with a finite number of elements
in the set after(Q) are considered.
We start by formalizing the informal definition of danger of deadlock by the
concept lockfree.
Definition 2.1.0 (locked)
locked(P,X)
=
(ET:T e after(C(X)):Succ(T) # 121 A Succ(e(T,P,X)) ~ 121)
(End of Definition)
Definition 2.1.1 (lockfree)
lockfree(X) = (BP:P e X:~locked(P,X))
(End of Definition)
If ~lockfree(X) holds, we say that the system specified by X has danger of
peiqg locked.

Property 2.1.2
lockfree(e)
lockfree ({P})
- 26 -
, for any process P
(0)
(1)
(2) C(X) is non-terminating ~ lockfree(X)
(End of Property)
Property 2.1.3
Let PO be a process in after(C(X». We then have
Succ(PO) ~ (UT:T e X:Succ(e(PO,T,X»)
Proof
a e Succ(PO)
= { Definition Succ(P) }
a e {bib e AT A (EP':P'e after(PO):PO ~ P')}
= { set calculus }
a e A A (EP':P'e after(C(PO»:PO ~ P')} T
~ { PO e after(C(X), Definition composition}
(ET:T e X:a E A A (EP':P'E after(T):e(PO,T,X) ~ P')} T .
= { Definition Succ(P) }
(ET:T E X:a E Succ(e(PO,T,X»)
= { set calculus }
a E (UT:T E X:Succ(e(PO,T,X»)
(End of Proof and Property)
Property 2.1.4
lockfree(X)
=
1 >
(BPO:PO E after(C(X»: (Succ(PO) = e) = (BT:T E X:Succ(e(PO,T,X» = e»
lockfree(X)
= { Definition lockfree }
(BT:T e X:~locked(T,X»
= { Definition locked}
(BT:T E X: (BPO:PO E after(C(X»:Succ(PO) * e v Succ(e(PO,T,X»
= { predicate calculus }
(BPO:PO E after(C(X»:Succ(PO) = " ~ (BT:T E X:Succ(e(PO, T,X»
= { Property 2.1.3 }
= e))
= e»

- 27 -
(BPO:PO e after(C(X»: (Succ(PO) = 0) = (BT:T e X:Succ(e(PO,T,X» = 0»
(End of Proof and Property)
Theorem 2.1.5
Let X be a set of processes. For each process T, T e X, T denotes the process
C(X\{T}). Then A
lockfree(X) =(BT:T e X:lockfree({T,T}»
lockfree(X)
= { Definition lockfree }
(BT:T e X:,locked(T,X»
= { note } A A
(BT:T e X:,locked(T,X» A (BT:T e X :,locked(T,{T,T}» A A
= { C(X) = C({T,T}), T e {T,T}, Definition locked} A A A
(BT:T e X:,locked(T,{T,T}» A (BT:T e X:,locked(T,{T,T}»
= { predicate calculus, Definition lockfree } A
(BT:T e X:lockfree({T,T}»
We prove: A A
(BT:T e X:,locked(T,X» ~ (BT:T e X:,locked(T,{T,T}»
For any T, T E X, we derive: A A
locked(T, {T, T})
= { Definition locked} A A A
(EPO:PO e after(C{T,T}):Succ(PO) = 0 A Succ(p(PO,T,{T,T}» * 0)
~ { C({T,T}) = C(X), Property 2.1.3 }
(EPO:PO e after(C(X»:Succ(PO) = 0 A (EU:U e X\{T}:Succ(e(PO,U,X» * 0»
= { predicate calculus, Definition locked}
(EU:U e x\{T}:locked(U,X»
~ { predicate calculus }
(EU:U e X:locked(U,X»
(End of Proof and Theorem)
- 28 -
Example 2.1.6
Consider the three processes 00, RO and SO that were introduced in example
2.0.0.
Let X = {OO,RO,SO}, and let PO be the process that corresponds to the
composition of the elements in {Q1,R1,S3}.
As it can be derived from Figure 2.0.1, PO is an element of after(C(X».
Since Succ(PO) = e and Succ(Q1) * e, we conclude locked(OO,X) and
locked (00, {OO,C(x\{OO})}).
(End of Example)
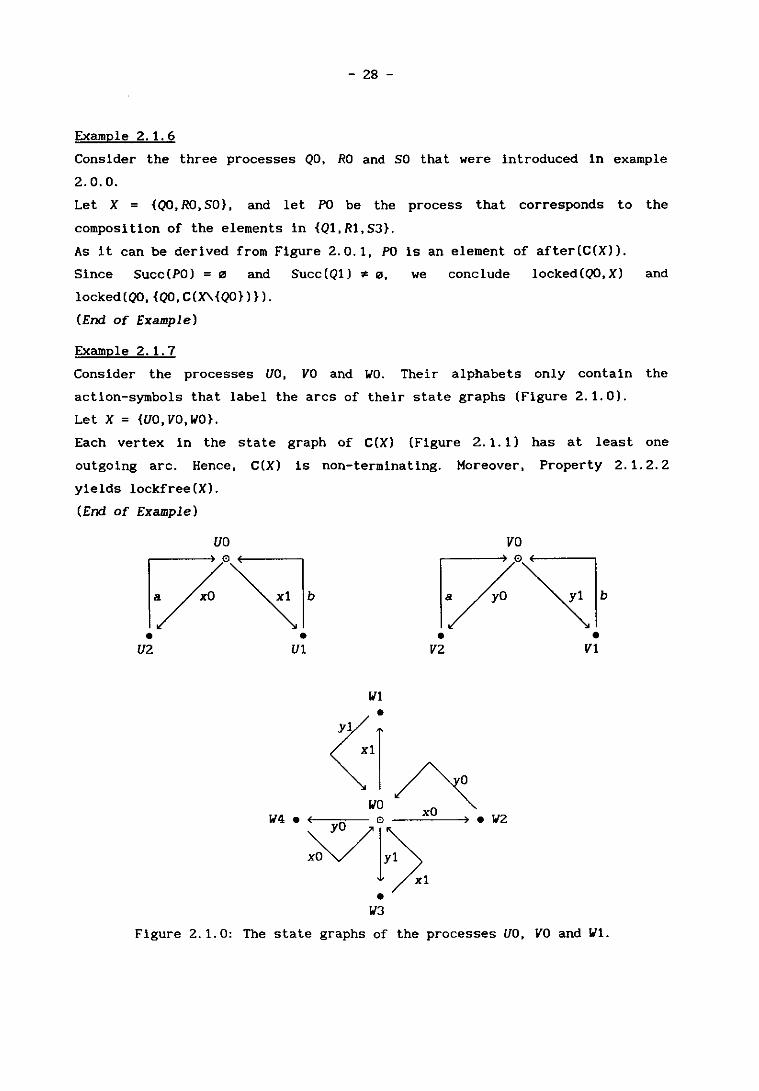
Example 2.1.7
Consider the processes va, va and WO. Their alphabets only contain the
action-symbols that label the arcs of their state graphs (Figure 2.1.0).
Let X = {VO,VO,WO}.
Each vertex in the state graph of C(X) (Figure 2.1.1) has at least one
outgoing arc. Hence, C(X) is non-terminating. Moreover, Property 2.1.2.2
yields lockfree(X).
(End of Example)
UO
V2 VI
WI
• V2
vo
• V1
Figure 2.1.0: The state graphs of the processes va, va and WI.

- 29 -
(U2IVOIW2) (UlI VO IWll C(X) :
:y.~;y.~ (U2IV2IWO) a (UOIVOIWO) b (UIIVIIWO)
• ) 0 E •
~/O~/, • •
(UOIV2IW4) (UOIVIIW3)
Figure 2.1.1: The state graph of process C(X).
2.2 Construction of lockfree systems
It is difficult to determine whether a system that is specified by a set X of
processes has danger of being locked. If X only consists of non-terminating
processes, we may proceed as in example 2.1.7. A more general method is
presented in this section.
Lemma 2.2.0
Let X and Y be sets of processes such that X A Y = 0 and lockfree(X). Then
~locked(C(X),{C(X),C(Y)}) = (BT:T e X:~locked(T,X u Y))
~locked(C(X),{C(X),C(Y)})
= { Definition locked}
(BPO:PO e after(C({C(X),C(Y)}))
:Succ(PO) * 0 v Succ(e(PO,C(X),{C(X),C(Y)})) = 0)
= { lockfree(X) }
(BPO:PO e after(C({C(X),C(Y)}))
:Succ(PO) * 0 v (BT:T e X:Succ(e(e(PO,C(X),{C(X),C(Y)}),T,X)) = 0))
= { C({C(X),C(Y)}) = C(X u y) }
(BPO:PO e after(C(X u Y))
:Succ(PO) * 0 v (BT:T e X:Succ(e(PO,T,X u Y)) = 0))
= { predicate calculus, Definition: locked}
(BT:T e X:~locked(T,X u y))
(End of Proof and Lemma)
- 30 -
The following theorem shows how to build larger lockfree systems out of
smaller ones.
Theorem 2.2.1
Let both X and Y be a set of processes such that X n Y = 0, lockfree(X) and
lockfree(Y). We have:
lockfree({C(X),C(Y)} = lockfree(X u Y)
lockfree({C(X),C(Y)})
= { Definition lockfree }
~locked(C(X),{C(X),C(Y)}) A ~locked(C(Y),{C(X),C(Y)})
= { Lemma 2.2.0 }
(BPO: PO e X:~locked(PO,X v Y)) A (BPO:PO e Y:~locked(PO,X v Y))
= { predicate calculus, Definition lockfree }
lockfree(X v Y)
(End of Proof and Theorem)
Using Theorem 2.2.1 and Properties 2.1. 2.1 and 2.1.2.2, we may be able to
determine for a finite set X of processes whether lockfree (X) holds. To
explain this further, the notion of partition-tree is introduced.
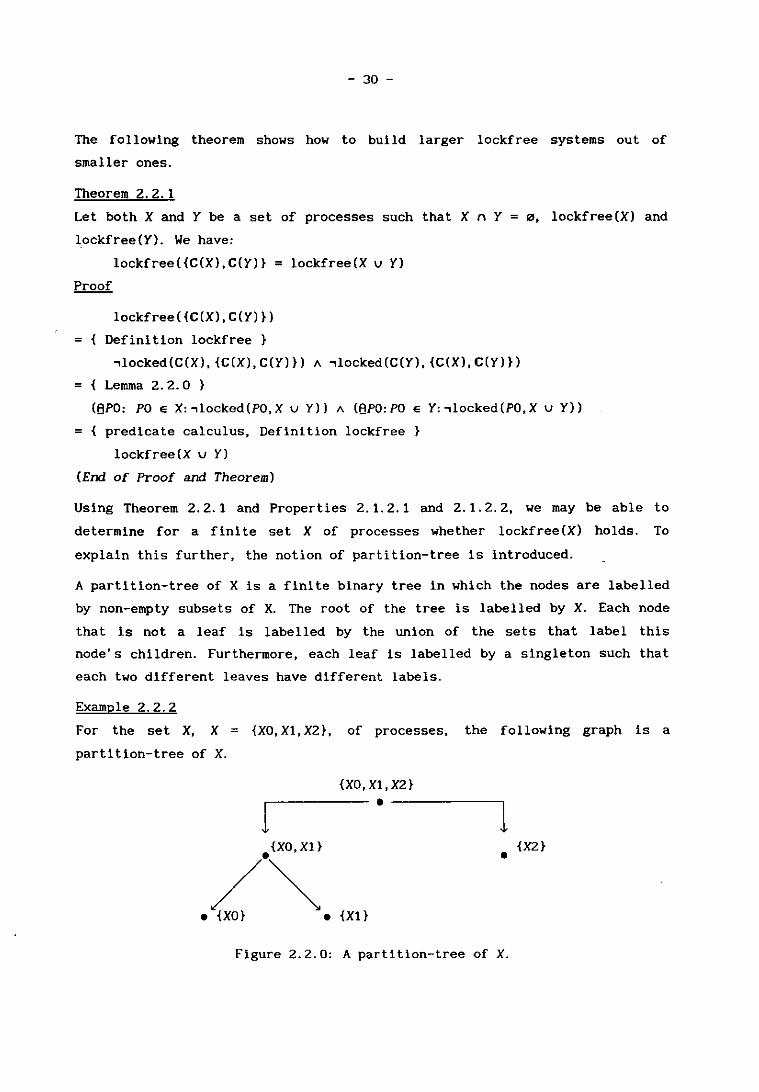
A partition-tree of X is a finite binary tree in which the nodes are labelled
by non-empty subsets of X. The root of the tree is labelled by X. Each node
that is not a leaf is labelled by the union of the sets that label this
node's children. Furthermore, each leaf is labelled by a singleton such that
each two different leaves have different labels.
Example 2.2.2
For the set X, X = {XO, Xl, X2}, of processes, the following graph is a
partition-tree of X.
{XO,X1,X2}
1....---·
/~ • {XO} • {Xl}
1 •
Figure 2.2.0: A partition-tree of X.
{X2}

- 31 -
Notice that several partition-trees of X exist.
(End of Example)
From Property 2.1.2.1, we infer that the singletons that label the leaves of
a partition-tree of X are lockfree. If such a tree can be traversed from
leaves to root using Property 2.1.2.2 and Theorem 2.2.1, lockfree(X) holds.
Example 2.2.3
Consider the processes PO, QO, RO and SO. Their alphabets only contain those
action-symbols that label the arcs in their state graphs (Figure 2.2.1)
PO o
QO RO SO
/j. • E b •
[} [} [} P2 Q1 R1 S1
Figure 2.2.1: The state graphs of processes PO, QO, RO and SO.
Let X = {PO,QO,RO,SO}.
Lockfree(X) can be proven using the following partition-tree.
{PO,QO,RO,SO}
!r--- • ---""1
~~R;;}1 f{Qo~s;;}1 •
{PO} •
{RO} •
{QO} •
{SO}
Figure 2.2.2: A partition-tree of X.
Since ilPO " ilRO = 121 and PO as well as RO is non-terminating, C( {PO, RO}) is
non-terminating. Property 2.1.2.2 then states lockfree({PO,RO}).
Similar reasoning yields lockfree({QO,SO}).
It is easily verified that lockfree({C({PO,RO}),C({QO,SO})}).
Hence, we may conclude from Theorem 2.2.1 that lockfree(X) holds.
(End of Example)
The above strategy does not always work. There are lockfree systems for which
a proper partition-tree can not be found. The following example shows such a
system.
- 32 -
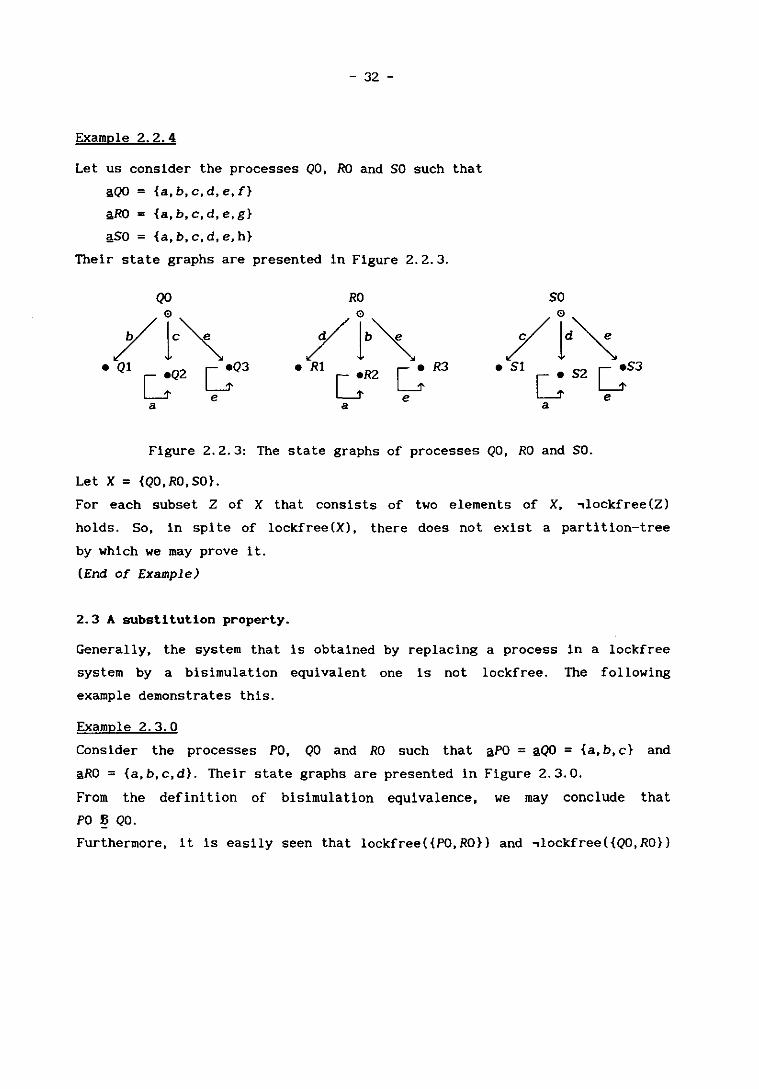
Example 2.2.4
Let us consider the processes QO, RO and SO such that
gQO = {a,b,c,d,e,f}
gRO = {a,b,c,d,e,g}
~SO = {a,b,c,d,e,h}
Their state graphs are presented in Figure 2.2.3.
QO RO
R3
a a
SO
/Id~ • S1 c..; S2 ~S3
a
Figure 2.2.3: The state graphs of processes QO, RO and SO.
Let X = {QO,RO,SO}.
For each subset Z of X that consists of two elements of X, ,lockfree(Z)
holds. So, in spite of lockfree (X), there does not exist a partition-tree
by which we may prove it.
(End of Example)
2.3 A substitution property.
Generally, the system that is obtained by replacing a process in a lockfree
system by a bisimulation equivalent one is not lockfree. The following
example demonstrates this.
Example 2.3.0
Consider the processes PO, QO and RO such that ~PO = gQO = {a,b,c} and
~RO = {a,b,c,d}. Their state graphs are presented in Figure 2.3.0.
From the definition of bisimulation equivalence, we may conclude that
PO ~ QO.
Furthermore, it is easily seen that 10ckfree({PO,RO}) and ,lockfree({QO,RO})
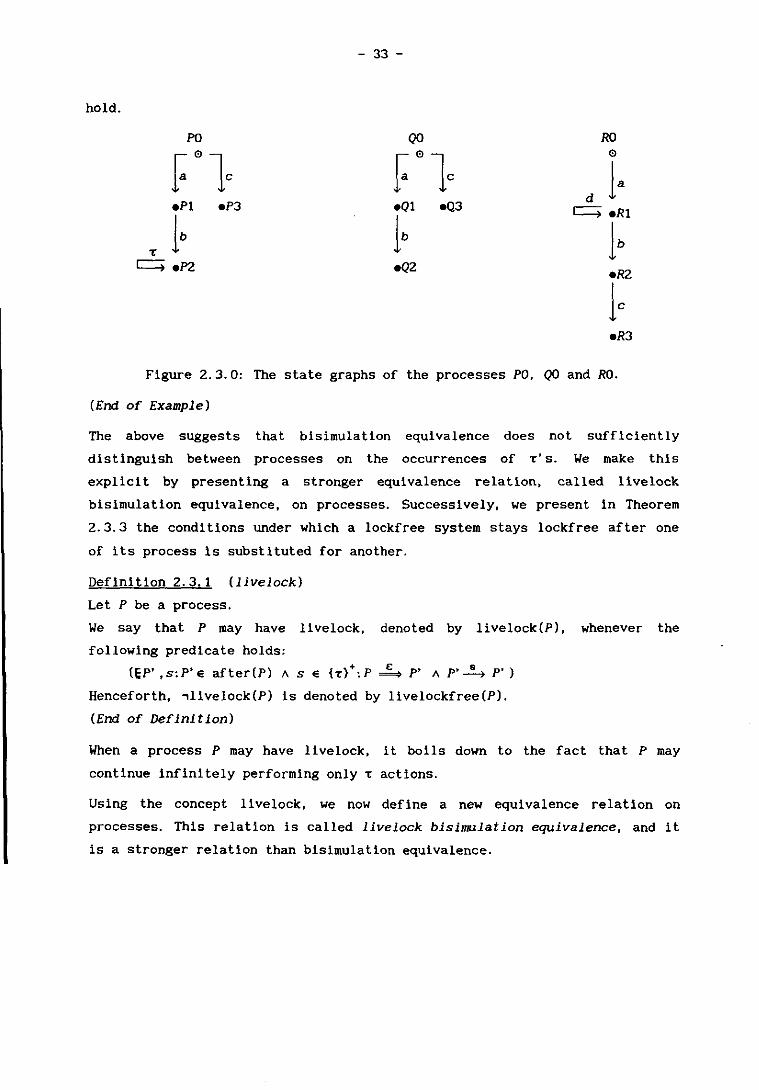
- 33 -
hold.
PO QO RO
fa 01C
° d la
eQ1 eQ3 '==+ eR1
Ib Ib eQ2 eR2
Ic eR3
Figure 2.3.0: The state graphs of the processes PO, QO and RO.
(End of Example)
The above suggests that bisimulation equivalence does not sufficiently
distinguish between processes on the occurrences of T'S. We make this
explicit by presenting a stronger equivalence relation, called livelock
bisimulation equivalence, on processes. Successively, we present in Theorem
2.3.3 the conditions under which a lockfree system stays lockfree after one
of its process is substituted for another.
Definition 2.3.1 (livelock)
Let P be a process.
We say that P may have livelock, denoted by livelock(P), whenever the
following predicate holds:
(EP' ,s:P'e after(P) A s e {T}+:P ~ P' A P'~ P')
Henceforth, ,livelock(P) is denoted by livelockfree(P).
(End of Definition)
When a process P may have livelock, it boils down to the fact that P may
continue infinitely performing only T actions.
Using the concept l1velock, we now define a new equivalence relation on
processes. This relation is called livelock bisimulation equivalence, and it
is a stronger relation than bisimulation equivalence.

- 34 -
Definition 2.3.2 (livelock bisimulation equivalence)
Two processes PO and PI are called livelock bisimulation equivalent, denoted
by PO !!L PI, if and only if there exists a bisimulation /3 such that
(PO,Pl) e /3 and for all pairs (U,V) in /3 livelock(U) = livelock(V).
(End of Definition)
Without proof, we state that by restricting ourselves to processes P with
after(P) finite, all properties derived in section 1.4 also hold for livelock
bisimulation equivalence.
Theorem 2.3.3
Let TO, Tl and S be processes such that ~TO n ~S = ~Tl n ~S.
Furthermore, let A be an alphabet such that ~TO n ~S !;; A !;; ~TO n ~Tl and
TO~A !!L Tl~A. We have:
lockfree({TO,S}) = lockfree({Tl,S})
Proof
Since TO~A !!L Tl~A, there exists a proper bisimulation /3 for it.
According to Property 1.4.4 (TOIS)t(A u ~S) !!L (T1IS)t(A U ~S).
Applying Property 1.4.1.2 makes it obvious that a corresponding bisimulation
r is: {((POISO), (PtlSO»1 (PO,Pl) e /3 A SO e after(S)}
We will only derive locked(TO,{TO,S}) = locked(Tl,{Tl,S}), because then the
proof of locked(S,{TO,S}) = locked(S,{Tl,S}) will be trivial.
locked(TO, {TO,S})
= { Definition locked}
(EP:P e after(C({TO,S}»:Succ(P) = 0 A Succ(e(P,TO,{TO,S}» ~ 0)
= { set calculus, Definition composition}
(EP:P e after(C({TO,S}»
:Succ(P) = 0 A (Ea:a e ~TO n ~S:a e Succ(e(P,TO,{TO,S}»»
= { note }
(EP:P e after(C({Tl,S}»
:Succ(P) = 0 A (Ea:a e ~Tl n ~S:a e Succ(e(P,Tl,{Tl,S}»»
= { set calculus, Definition composition}
(EP:P e after(C({Tl,S}»:Succ(P) = 0 A Succ(e(P,Tl,{Tl,S}» ~ 0)
= { Definition locked}
locked(Tl,{Tl,S})

- 35 -
Note
We prove that
(EP:P e after(C({TO,S}»
:Succ(P) = 0 A (Ea:a e ~TO n ~S:a e Succ(e(P,TO,{TO,S}»»
(EP:P e after(C({Tl,S}»
:Succ(P) = 0 A (Ea:a e aTl n as:a e Succ(e(P,Tl,{Tl,S}»»
For reasons of symmetry, the converse is omitted.
Let P be a process in after<C( {TO, S}» such that Succ(P) = 0 and
Succ(e(P,TO,{TO,S}» contains an element of aTO n as.
From (TOIS)t(A v as) ~L (Tl!S)t(A vaS) and P e after(C({TO,S}»). it is
inferred that there exists a process Q, Q e after(C({Tl,S}», such that:
(Pt(A v as),Qt(A v ~S» e r
Since Succ(P) = 0 and aTl n as ~ A, the definitions of composition, hiding
and live lock bisimulatlon equivalence state that there exists a process Q'
such that Q ~ Q' (t e (~Tl\A)'), (Pt(A v as»,Q't(A v ~S» e rand
Succ(Q') = 0.
According to the definition of r, processes PO and a process QO exist such
that PO = e(P,TO,{TO,S}) and QO = e(Q',Tl,{Tl,S}).
Since ~TO n as ~ A and Succ(PO) contains an element of aTO n as, Succ(POtA)
contains an element of ~TO n as. Furthermore, it may be concluded from
Succ(Q') = 0 and the definitions of composition and hiding that
Succ(QOtA) ~ aTl n ~S.
Then, we infer from (POtA,QOtA) e ~ and aTO n as = ~Tl n ~S that Succ(QOtA)
contains an element of aTl n as. Hence Succ(QO) contains an element of
aTl n as.
(End of Proof and Theorem)

- 36 -
Theorem 2.3.3 may be generalized.
Theorem 2.3.4
Let X be a set of processes, let P be an element of X, and let Q be a
process. Assume that Q ~ X\{P} and aC(X\{P}} naP = gC(Y\{Q}) n aQ.
Furthermore, let A be an alphabet such that aC(X\{P}) n aP ~ A ~ aP n aQ and
PtA ~L QtA.
If Y denotes the set X of processes in which P is substituted for Q, we have
lockfree(X) = lockfree(Y)
lockfree(X)
= { Theorem 2. 1. 5 }
(ST:T e X:lockfree({T,C(x\{T})}))
= { note },
(ST:T e X:lockfree({T,C(y\{T})}))
= { Theorem 2. 1. 5 }
lockfree(Y)
Note
This equality is based upon two observations.
First: C(x\{P}) = C(Y\{Q}), ptA ~L QtA and Theorem 2.3.3 yields
lockfree({P,C(X\{P})}) = lockfree({Q,C(Y\{Q})})
Second: Let T e x\{P} (and thus T e Y\{Q}).
Easily, it is seen that aT n aC(x\{T}) = aT n aC(y\{T}).
Furthermore, notice that aC(x\{T,P}) u A = i1,C(y\{T,Q}) u A.
and i1,T n i1,C(x\{T}) ~ aC(x\{T,P}) u A ~ aC(x\{T}) n aC(y\{T}).
From Property 1.4.2.2 and Property 1.4.3, we infer that
C(x\{T})t(aC(x\{T,P}) u A) ~L C(y\{T})t(i1,C(y\{T,Q}) u A)
Then Theorem 2.3.3 states:
lockfree({T,C(x\{T})}) = lockfree({T,C(y\{T})})
(End of Proof and Theorem)
P.J. de Graaff [2) has shown that within each class of bisimulation
equivalent processes there exists a unique process Whose state graph has the
smallest number of vertices and arcs from all the other processes. An
algorithm exists that computes for a given process this unique
representative. The algorithm is called the minimization algorithm for
bisimulation equivalence. Without going into further details, we state that

- 37 -
the above can be extended to livelock bisimulation equivalence.
The complexity of computing lockfree(X) is proportional to the total number
of arcs and vertices of the state graphs that correspond to the processes in
X. Theorem 2.3.4 and the minimization algorithm for livelock bisimulation
equivalence may be used to reduce the complexity of computing lockfree(X).
2.4 Deadlockfree
In section 2.0, we informally defined danger of deadlock in a system built
out of concurrently running mechanisms. Unfortunately, this definition does
not cover all the aspects that are generally implied by danger of deadlock.
Consider a system built out of two or more SUbsystems. Each two subsystems do
not interfere in one another's behaviour. Intuitively, this system has danger
of deadlock if and only if one or more of the subsystems have danger of
deadlock. Yet, let one of these separate subsystems have danger of deadlock
while another never stops. Then, the composite system never stops. Although
this system has danger of deadlock, the informal definition states otherwise.
The above and Property 2.1.2.2 yields that the concept lockfree is a to weak
predicate to state whether or not a system has danger of deadlock. Therefore,
we present in this section an other concept, called deadlockfree, that
resolves our objections against the concept lockfree.
Definition 2.4.0 (connected)
connected (X)
=
(BY:Y ~ X A Y ¢ 0 A Y ¢ X:gC(Y) n gC(x\Y) ¢ 0 )
(End of Definition)
Definition 2.4.1 (maximal connected)
Let X be a set of processes, and let Y be a subset of X. We define:'
maximal connected(Y,X) = connected(Y) A (BP:P e x\Y:, connected(Y v {P}»
(End of Definition)
Definition 2.4.2 (deadlockfree)
deadlockfree(X) = (BY:Y ~ X A maximal connected(Y,X):lockfree(Y»
(End of Definition)

Property 2.4.3
deadlockfree(X) • lockfree(X)
(End of Property)
- 38 -

3. OTHER CONCEPTS
3.0 Introduction
In the previous chapter, we have introduced the concept deadlockfree to
describe the presence or absence of deadlock in a system built out of
concurrently running mechanisms. Similarly, properties related to danger of
deadlock may be formalized. In this chapter, two of these properties, called
danger of being disabled and danger of being ignored, will be presented. A
short treatment of each of them is given. For more information about these
concepts and their extensions to actions, the reader is referred to [4].
3.1 Disablefree
Consider a system that has performed actions up to some moment in time.
From this moment on, a not yet terminated component of the system can never
again participate in whatever actions the system shall perform. One might say
that this component has danger of being disabled by the system. We formalize
this property as follows:
Definition 3.1.0 (disabled)
disabled(P,X)
=
(ET: T e after(C(X)
:Succ(E(T,P,X») e P(aP n aC(X))'{{e}}
A (BT':T'e after(T):Succ(T') naP = e»
(End of Definition)
Definition 3.1.1 (disablefree)
disablefree(X) = (BP:P e X:~disabled (P,X))
(End of Definition)
The concept disablefree is stronger than the concept deadlockfree.
If we replace each occurrence of lockfree in the properties 2.1.2. a and
2.1. 2. 1 and in the theorems 2.1.5, 2.3.3 and 2.3.4 by disablefree, these
properties and theorems are still correct. Unfortunately, substituting
- 39 -

- 40 -
each occurrence of lockfree for disablefree in Theorem 2.2.1 yields a theorem
that does not hold. Hence, we do not have a construction theorem that shows
how larger disablefree systems may be built from smaller ones.
3.2 Ignorefree
A disablefree system may always perform a sequence of actions such that each
not terminated component participates in one of these actions. However, this
does not imply that for each not terminated component the system can only
perform a finite number of actions in which this component does not
participate.
When a system may continuously perform actions in which a not terminated
component does not participate, we say that that component may be ignored by
the system. This will now be formalized.
Definition 3.2.0 (ignored)
Let X be a set of processes and let P be a process in X.
For each process T, T E after(C(X», Tp denotes
C({Qi (EV:V E X'-{P}:Q = e(T,V,X)}).
Then, we define:
ignored(P,X) = locked(P,X) v processlivelock(P,X)
where processlivelock(P,X) denotes:
the
(ET:T E after(C(X»:Succ(e(T,P,X» ~ 0 A livelock(T taC(X'-{P}») p
(End of Definition)
Definition 3.2.1 (jgnorefree)
ignorefree(X) = (BT:T E after(C(X»:,ignored(T,X»
(End of Definition)
process
When (BT:T E X:,processlivelock(T,X» is abbreviated by systemlivelockfree(X)
, the following theorem is self evident.
Theorem 3.2.2
ignorefree(X) = lockfree(X) A systemlivelockfree(X)
(End of Theorem)
Furthermore, it is easily seen that ignorefree is a stronger concept than
disablefree.
In Properties 2.1. 2. 0 and 2.1. 2.1 and in Theorem 2.1.5, all occurrences of
lockfree may be replaced by systemlivelockfree, without changing the

- 41 -
correctness of these properties and theorems. If we add to Theorem 2.2.1 that
C(X) and C(Y) are non-terminating, to Theorem 2.3.3 that both TO and T1 are
non-terminating and to Theorem 2.3.4 that P and Q are non terminating, these
modified theorems also hold if we replace in them all occurrences of lockfree
by systemlivelockfree.
Theorem 3.2.2 ensures that all the modified properties and theorems that are
presented in this section also hold if we replace in them all occurrences of
systemlivelockfree by ignorefree.
This section is concluded by presenting a theorem that shows how a larger
disablefree system may be built out of two ignorefree systems.
Theorem 3.2.3
Let X and Y be processes such that C(X) and C(Y) are non-terminating,
X n Y = ~, and ignorefree(X) and ignorefree(Y). Then
disablefree({C(X),C(Y)}) = disablefree(X u Y)
(End of Theorem)

4. CONCLUSIONS
In this report, we have combined mayor features of CCS and Trace Theory into
a new formalism. The central notion in this formalism is called process. It
is used to specify the behaviour of systems. Like CCS, we do not exclude
non-determinism in the specification of the behaviour of a system.
Furthermore, the specification of the behaviour of a larger system is
obtained from the specifications of the system's components in a way similar
to the one used in Trace Theory. We have introduced the T-action. Contrary
to CCS, T-actions are not used to specify the interaction between two
systems. They are only used to abstract from certain actions of a system.
Besides presenting a formalism, we have also given a summary of some
equivalence relations on the universe of processes. Furthermore, a concept is
presented that describes when a system has danger of deadlock. A theorem is
given that shows how larger deadlockfree systems may be built out of smaller
ones. Conditions are stated under which a system without danger of deadlock
stays deadlockfree after one of its processes is substi tuted for another.
Finally, the same is performed for other deadlock-like properties.
Further research will be focused on putting the results in this report into
practice. Concretely, this means that the investigation alms to embed the
results into some sort of top-down design trajectory for a class of
concurrent systems. The important aspect in this trajectory will be a
meaningful decomposition of a system that is hard to design into components
that are easier to design. By a meaningful decomposition, we emphasize the
point that the composite behaviour of the components has to correspond to the
behaviour of the system to be designed. For instance, decomposition may not
introduce deadlock.
Acknowledgements:
The author is indebted to anyone who somehow has contributed to this report.
Special thanks are due to P.J. de Graaff, A.F.P. van Putten, H.H.M. van de
Weij and M.R.M. Winter for their fruitful comments.
- 42 -

5. REFERENCES
[1] Brookes, S.D. and C.R. Rounds
Behavioural Equivalent Relations Induced By Programming Logics
Internal report (CMU-CS-83-112), Department of Computer Science,
Carnegie Mellon University,
Pittsburgh, Pennsylvania, 1983
[2] Graaff, P.J. de,
Some notes on observation equivalence
Faculty of Electrical Engineering,
Digital Systems Group (EB),
Eindhoven University of Technology,
Personal communications
[3] Hoare, C.A.R.
Communicating Sequential Processes,
Prentice-Hall International Series in Computer Science,
Englewood Cliffs, New Jersey, 1985
[4] Huis in 't Veld, R.J.
Deadlock properties expressed in terms of Trace Theory
M. Sc. -thesis, Faculty of Mathematics and Computing Science,
Eindhoven University of Technology, 1987
[5] Kaldewaij, A.
A Formalism for Concurrent Processes
Ph. D. -thesis,
Eindhoven University of Technology, 1986
[6] Milner, R.
A Calculus of Communicating Systems
Lecture Notes in Computer Science, vol. 92
Berlin: Springer, 1980
- 43 -

£indhoven University of Technology Research Reports faculty of Electrical Engineering
ISSN 0167-9708 Coden: TEU£DE
( 1711
( 1721
(173 )
(174)
( 175)
( 176)
( 177)
(178)
(179)
(1801
(181 )
Monnee, P. and M.H.A.J. Herben MLITJnn5LE-8EAM GROUNOSTAT~FLECTOR ANTENNA SYSTEM: A preliminary study. EUT Report 87-E-171. 1987. ISBN 90-6144-171-4
Bastiaans, M.J. and A.H.M. Akkermans ERROR REDUC110N IN lWO-OIMENSloNAl PULSE-AREA MOOULA110N, WIIH APPLICATION TO COMPUTER-GENERATED TRANSPARENCIES. EUI Report 87-E-172. 1987. ISBN 90-6144-172-2
Zhu Yu-Cai on-A BDUND OF THE MODELLING ERRORS OF BLACK-BOX EUT Report 87-E-173. 1987. ISBN 90-6144-173-0
TRANSFER FUNCTION ESTIMATES.
Berkelaar, M.R.C.M. and J.F.M. Theeuwen TECHNOLOGY MAPPING FROM BOOLEAN EXPRESSIONS 10 STANDARD CELLS. EUT Report 87-E-174. 1987. ISBN 90-6144-174-9
Janssen, P.H.M. FURl HER RESULTS ON THE McMILLAN DEGREE AND THE KRONECKER EUT Report 81-E-175. 1987. ISBN 90-6144-175-7
INDICES OF ARMA MODELS.
Janssen, P.H.M. and P. Stoiea, T. Soderstrom, P. E~khOff MODEL STRUCTURE SELECTI~ MULTIVARIABLE SYSTEM BY CROSS-VALIDATION METHODS. EUT Report 87-E-176. 1987. ISBN 90-6144-176-5
Stefanov, B. and A. Veefkind, L. Zarkova ARCS IN CESIUM SEEDED NOBLE GASES RESULTING FROM A MAGNETICALLY FIELD. EUT Report 87-E-177. 1987. ISBN 90-6144-177-3
Janssen, P.H.M. and P. Stoica
INDUCED ELECTRIC
ON THE EXPECTATION OF THE PRODUCT OF FOUR MATRIX-VALUED GAUSSIAN RANDOM VARIABLES. EUT Report 87-E-178. 1987. ISBN 90-6144-178-1
Lieshout, C.J.P. van and L.P.P.P. van Cinneken GM: A gate matrix layout generator. EUT Report 87-E-179. 1987. ISBN 90-6144-179-X
Cinneken, L.P.P.P. van GRIDLESS RoUTING FOR GENERALIZED CELL ASSEMBLIES: EUT Report 87-E-180. 1987. ISBN 90-6144-180-3
Report and user manual.
Bollen, M.H.J. and P.T.M. Vaessen ~NCY SPECTRA FOR ADMITTANCE ANO VOLTAGE TRANSFERS MEASUREO ON A THREE-PHASE POWER TRANSFORMER. EUT Report 87-E-181. 1987. ISBN 90-6144-181-1
(182) Zhu Yu-C.i ~CK-BOX IDENTIFICATION OF MIMO TRANSFER FUNCTIONS: Asymptotic properties of prediction error models. EUT Report 87-E-182. 1987. ISBN 90-6144-182-X
(183) Zhu Yu-C.i
(184 )
( 185)
on-THE BOUNDS OF THE MODELLING ERRORS OF BLACK-BOX MIMO TRANSFER FUNCTION ESTIMATES. EUT Report 87-E-183. 1987. ISBN 90-6144-183-8
Kadete, H. ENHANCEMENT OF HEAT TRANSFER BY CORONA WIND. EUT Report 87-E-184. 1987. ISBN 90-6144-6
Hermans, P.A.M. and A.M.J. Kwaks, r.v. Bruza, J. Di~b THE IMPACT OF TELECOMMUNICA~ON RURA~AS IN 0 ELOPING COUNTRIES. EUT Report 87-E-185. 1987. ISBN 90-6144-185-4
(186) Fu Yanhong
( 187)
THE INFLUENECE OF CONTACT SURFACE MICROSTRUCTURE ON VACUUM ARC STABILITY AND ARC VOLT AGE. EUT Report 87-E-186. 1987. ISBN 90-6144-186-2
Kaiser, F. and L. Stok, R. van den Born DESTCN AND IMPLEMENTATION OF A MODULE LIBRARY TO SUPPORT THE STRUCTURAL SYNTHESIS. EUT Report 87-E-187. 1987. ISBN 90-6144-187-0

Eindhoven University of Technoloqy Research Reports Faculty of Electrlcal Enqineerlng
ISSN 0167-9708 Coden: TEUEDE
( 188)
(189)
Jozwiak, J. THE FuLL DECOMPOSITION OF SEQUENTIAL MACHINES WITH THE STATE AND OUTPUT BEHAVIOUR REALIZATION. EUT Report 88-E-188. 1988. ISBN 90-6144-188-9
Pineda de Cyvez, J. ALWAys: A system for wafer yield analysis. EUT Report 88-E-189. 1988. ISBN 90-6144-189-7
(190) Siuzdak, J. OpllCAL COUPLERS FOR COHERENT OPTICAL PHASE DIVERSITY SYSTEMS. EUT Report 88-E-190. 1988. ISBN 90-6144-190-0
(191) Bastiaans, M.J. LOCAL-FREQUENCY DESCRIPTION OF OPTICAL SIGNALS AND SYSTEMS. EUT Report 88-E-191. 1988. ISBN 90-6144-191-9
(192)
(193)
Worm, S.C.J. AlMULTI-FREQUENCY ANTENNA SYSTEM FOR PROPAGATION EXPERIMENTS WITH THE OLYMPUS SATELLITE. EUT Report 88-E-192. 1988. ISBN 90-6144-192-7
Kersten, W.F.J. and G.A.P. Jacobs ANALOG AND DIGITAL SIMULATI~LINE-ENERGIZING OVERVOLTAGES AND COMPARISON WITH MEASUREMENTS IN A 400 kV NETWORK. EUT Report 88-E-193. 1988. ISBN 90-6144-193-5
(194) Hosselet, L.M.L.F. MARTINUS VAN MARUM: A Dutch scientist in a revolutionary time. EUT Report 88-E-194. 1988. ISBN 90-6144-194-3
(195) Bondarev, V.N.
( 196)
ON SYS1EM IDENTIFICATION USING PULSE-FREQUENCY MODULATED SIGNALS. EUT Report 88-E-195. 1988. ISBN 90-6144-195-1
Liu Wen-Jiang, Zhu Yu-Cai and Cai Da-Wei MODEL BUILDING FOR AN INGOT HEAfTNG PROCESS: Physical identification approach. EUT Report 88-E-196. 1988. ISBN 90-6144-196-X
modelling approach and