A Dynamic Approximation of Balanced Gymnastics
11
© 2007 isea Sports Engineering (2007) 10, 209–220 209 Correspondence address: Alison Sheets Department of Mechanical & Aeronautical Engineering, University of California, Davis One Shields Avenue Davis, CA 95616-5294 USA Tel: 001 530 752 2163 Fax: 001 530 752 4158 E-mail: [email protected] Introduction The goal of an elite female gymnast’s uneven parallel bars dismount is to release the high bar, complete A dynamic approximation of balanced gymnastics landings Alison Sheets and Mont Hubbard Department of Mechanical & Aeronautical Engineering, University of California, Davis, USA Abstract A gymnast can balance after an uneven parallel bar dismount by contacting the ground with an appropriate body position and angular velocity. Balanceable gymnastics landings were predicted by dividing landing into two parts: a short duration impact phase when foot–mat contact forces are high, and a subsequent longer balancing phase during which the gymnast exerts active control at the joints to attenuate the resulting post-impact velocities and achieve a desired motionless terminal configuration. This paper identifies controllable sets of pre-impact landing positions and velocities for a typical female collegiate gymnast that are feasible targets for the end of flight following a single- and double-backward somersault uneven bar dismount with forward mass centre (CM) velocity. Simple algebraic impulse–momentum models for the impact phase determine impulses necessary to stop the feet and slow angular velocity. After impact, a dynamic analysis is needed to determine stability because non-negligible post-impact angular and linear velocities are possible. For almost all successfully balanced landings, ground contact occurs with the CM positioned above the feet and between the toe and heel, because the linear impact impulses that stop the feet also contribute to an angular impulse that slows angular momentum. Only at the largest pre-impact angular velocities following a double-somersault dismount can contact occur with the CM in front of the toe. The gymnast is in balanceable pre- impact orientations longer when rotating more slowly and with a smaller angular momentum; therefore balance may be more likely after performing a single-somersault dismount with a large moment of inertia. Keywords: dynamic balance, gymnastics landing, impact, model rotations and/or twists, and end balanced without moving the feet. To achieve balanced landings ground reaction forces (GRFs) of over 10 times body weight (BW) must be attenuated (McNitt-Gray, 1993) and angular velocity slowed from as high as 18 rad s –1 to zero with the centre of mass (CM) between the toe and heel. This occurs over roughly one second, during which there is a short duration (t = 0.04 s) impact char- acterised by large peak foot–mat contact forces, and a longer subsequent balance phase with GRFs of approximately one BW (McNitt-Gray, 1991, Figure 1). During balance, the gymnast actively exerts joint torques while interacting with a compliant surface to reduce post-impact velocities and achieve a motionless
Transcript of A Dynamic Approximation of Balanced Gymnastics

© 2007 isea Sports Engineering (2007) 10, 209–220 209
Correspondence address:Alison SheetsDepartment of Mechanical & Aeronautical Engineering, University of California, DavisOne Shields AvenueDavis, CA 95616-5294USATel: 001 530 752 2163Fax: 001 530 752 4158E-mail: [email protected]
Introduction
The goal of an elite female gymnast’s uneven parallelbars dismount is to release the high bar, complete
A dynamic approximation of balanced gymnasticslandings
Alison Sheets and Mont Hubbard
Department of Mechanical & Aeronautical Engineering, University of California, Davis, USA
Abstract
A gymnast can balance after an uneven parallel bar dismount by contacting the ground with anappropriate body position and angular velocity. Balanceable gymnastics landings were predictedby dividing landing into two parts: a short duration impact phase when foot–mat contact forcesare high, and a subsequent longer balancing phase during which the gymnast exerts activecontrol at the joints to attenuate the resulting post-impact velocities and achieve a desiredmotionless terminal configuration. This paper identifies controllable sets of pre-impact landingpositions and velocities for a typical female collegiate gymnast that are feasible targets for theend of flight following a single- and double-backward somersault uneven bar dismount withforward mass centre (CM) velocity. Simple algebraic impulse–momentum models for the impactphase determine impulses necessary to stop the feet and slow angular velocity. After impact, adynamic analysis is needed to determine stability because non-negligible post-impact angularand linear velocities are possible. For almost all successfully balanced landings, ground contactoccurs with the CM positioned above the feet and between the toe and heel, because the linearimpact impulses that stop the feet also contribute to an angular impulse that slows angularmomentum. Only at the largest pre-impact angular velocities following a double-somersaultdismount can contact occur with the CM in front of the toe. The gymnast is in balanceable pre-impact orientations longer when rotating more slowly and with a smaller angular momentum;therefore balance may be more likely after performing a single-somersault dismount with a largemoment of inertia.
Keywords: dynamic balance, gymnastics landing, impact, model
rotations and/or twists, and end balanced withoutmoving the feet. To achieve balanced landings groundreaction forces (GRFs) of over 10 times body weight(BW) must be attenuated (McNitt-Gray, 1993) andangular velocity slowed from as high as 18 rad s–1 tozero with the centre of mass (CM) between the toeand heel. This occurs over roughly one second, duringwhich there is a short duration (t = 0.04 s) impact char-acterised by large peak foot–mat contact forces, and alonger subsequent balance phase with GRFs ofapproximately one BW (McNitt-Gray, 1991, Figure1). During balance, the gymnast actively exerts jointtorques while interacting with a compliant surface toreduce post-impact velocities and achieve a motionless
10.4.3 Sports F76 14/5/08 14:56 Page 209

terminal configuration. Previous research hasmodeled impact and balance, and experiments haveinvestigated landing as a whole.
The models of drop landing impacts onto rigidsurfaces must include wobbling masses if the details ofGRFs, intersegmental joint torques, or passive tissuecontributions to mechanical energy dissipation wereof primary interest (Gittoes et al., 2006; Gruber et al.,1997; Pain & Challis, 2002, 2006). Following initialground contact with the heels, a rigid model overesti-mated peak GRFs by 150% (Pain & Challis, 2006).Following a drop landing with forefoot then heelground impact onto a rigid surface, peak forces wereoverestimated by as little as 13.9% using a rigid model(Gittoes et al., 2006). Additionally, the time to peakGRF using a rigid model more closely matched exper-imental data than did the wobbling mass model(Gittoes et al., 2006).
Impact with a compliant surface rather than a rigidone would similarly decrease peak impact forces andincrease the time to decelerate the mass (Nigg & Liu,1999). Also, muscle pre-activation increases withlanding surface compliance (Nigg & Liu, 1999).Because the gymnastics surface is compliant, muscleswould be pre-activated and the body would be morerigid at impact. This further diminishes the effect ofwobbling masses on GRF because the percentage ofmass that wobbles decreases with increased muscleactivation.
While wobbling masses are needed in the previousmodels, gymnastics landings are forefoot then heellandings onto compliant surfaces. Furthermore, as isshown below, the details of the amplitude andduration of the GRF are not essential to the study of
possible landing states. The same impulse is requiredto stop a mass travelling at a given speed regardless ofwhether the mass is modelled as rigid or wobbling andregardless of the landing surface. The complexity of awobbling mass model is not necessary for the presentapplication because only the impulses required to stopthe feet are calculated, not the GRF details or jointtorques required to hold the body rigid.
Dynamic balance was predicted by Pai & Patton(1997) by modelling the human as an invertedpendulum with a foot. Sets of CM positions andangular velocities that can be balanced in the presenceof environmental, anatomical and physiological con-straints, called feasible stability ranges, wereidentified. Their balance predictions using the simpli-fied model encompassed 99.8% of empiricaltrajectories even though subjects could move all bodysegments to regain balance (Pai & Patton, 1997;Patton, Pai & Lee, 1999).
Experimental measurements of landings thatinclude impact and balance phases have identifiedcommon balanced landing characteristics. Droplanding experiments have measured muscle activationpatterns, joint kinematics and GRFs after falls fromvarious heights (Arampatzis et al., 2003; McNitt-Gray,et al., 1993; Seegmiller and McCaw, 2003) and ontodifferent surfaces (McNitt-Gray et al., 1993). Whilestrategies for different landing conditions were deter-mined, the drop landing results are not completelyapplicable for gymnasts with larger pre-impact angularvelocities. In a more relevant study, McNitt-Gray et al.(2001) quantified differences in gymnast multi-jointcontrol strategies for three landings: following a single-forward somersault, backward somersault, and droplanding. Successful landing positions and orientationsas a function of CM velocity were identified, but werelimited to the subjects’ preferred landing strategies.Furthermore, it is unlikely that the subjects would havevoluntarily approached balance boundaries after theserelatively simple single-somersault manoeuvres.
While models of both impact and balance havebeen developed previously, they have not beencombined to identify balanceable sets of pre-impactlanding positions and angular velocities followingairborne movements with non-zero angular velocities.This can be done without the details of the peak, timeto peak and duration of the GRF, by using impulses.
210 Sports Engineering (2007) 10, 209–220 © 2007 isea
Dynamic approximation of balanced landings A.L. Sheets
End of LandingContact
Impact Balance
Rea
ctio
n fo
rce
(BW
)
Horizontal
Vertical
6
4
2
0
–2 –0.1 0 0.1 0.2 0.3Time (s)
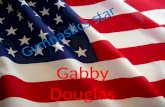
Figure 1 Landing GRFs after a single-revolution initiated 0.6 mabove ground level; data taken from McNitt-Gray et al. (2001).Peak GRFs would be more than twice as large after an unevenbar dismount beginning from 2.4 m.
10.4.3 Sports F76 14/5/08 14:56 Page 210

The goal of this paper is to create approximate modelsof each landing phase and combine them to identifybalanceable landings following single- and double-backward somersault uneven bar dismounts. Thedismounts were chosen to investigate the influence offlight angular momentum on balanceable pre-impactlanding conditions. Gymnasts can use this informationto develop strategies that allow them to land withoutmoving the feet.
Methods
An algebraic impact model and a dynamic balancemodel approximate the two phases of a balancedlanding after an uneven parallel bar dismount.
A rigid-body inverted pendulum that rotates abouta foot, similar that used in the dynamic balance modelof Pai & Patton (1997) and Patton & Pai (1999),approximates the gymnast during impact and balancephases (Figure 3, Table 1). A dynamic balance model isused in this paper because of the potential for non-negligible post-impact CM velocities. For example,with the CM between the toe and heel, after impact astatic model neglecting a sufficiently large velocityaway from the base of support would incorrectlyconclude that the gymnast can balance. Conversely, ifthe CM is not above the feet after impact but hasvelocity toward the base of support, balance may bepossible even though it is not predicted by a staticmodel (Pai & Patton, 1997; Hof et al., 2005).
Although there are different types of uneven bardismounts, single- and double-backward somersaultdismounts were chosen for this study because they arecommonly performed and allow for investigation ofnumerous pre-impact angular velocities. The resultsmay also interest coaches because high level gymnaststypically perform double somersault dismounts (withor without twists), while average gymnasts performsingle somersault dismounts. Sign conventions forlean angle θ0 and rotation rate ω0 are positive whenleaning and rotating backward, respectively, and areshown at initial ground contact (Fig. 2a). In flight thegymnast is assumed to rotate backwards (ω0 > 0) whiletranslating forward (vx0 > 0).
The body is assumed to be rigid at contact, andremains rigid while non-instantaneous vertical (ϑy)and horizontal (ϑx) impulses (Fig. 2a) are applied to
stop the feet (McNitt-Gray et al., 2001). Although notexact, the rigid body assumption may be an adequateapproximation because the model requires the calcula-tion of only total impulses and not the time durationof contact GRF and joint force; 0.04 s is too short foractive feedback neural control and therefore musclesmust be pre-activated. The lower extremity must bestiff to resist collapse during impact because there is alarge pre-impact velocity (Arampatzis et. al., 2003).
Even though body configuration (shape) duringimpact is assumed to be constant, impact duration andangular velocity are large enough that total rigid-bodyrotation (~0.3 rad) is non-negligible. Whole-bodyrotation is included by assuming that post-impactrotation occurs about the ankle and that angularvelocity decreases linearly during impact. Theassumptions are necessary to calculate impulsemoment arms used in the non-instantaneous linearand angular impulse and momentum relationshipsapproximating impact:
ϑy = m(vyi – vy0) + mgΔti (1)
ϑx = m(vxi – vx0) (2)
Icm(ωi – ω0) = r(ϑx cos θavg – ϑy sin θavg) (3)
© 2007 isea Sports Engineering (2007) 10, 209–220 211
A.L. Sheets Dynamic approximation of balanced landings
CM CM
+ω0
–θ0
–θi
ϑx
ϑy Fh = mg Ft = mg
–ωi
a b
Figure 2 a Gymnast initial conditions (IC) θ0, ω0 for the impactmodel (typically ω0 > 0 and θ0 < 0) b ICs for the balance model. The terminal conditions after impact θi, ωi are the ICs for thebalance phase. Balance is achieved if θfmin
< θf < θfmaxwhen ωf = 0
or if the CM stops above the foot between the toe and heel.
10.4.3 Sports F76 14/5/08 14:56 Page 211

where m is gymnast mass, g gravity, r the distance fromankle to CM, Icm the whole body moment of inertiaabout the CM, θavg = θ0 + (ω0 + ωi)Δt/4 the averageangle between the line from ankle to CM and vertical,and subscripts 0 and i denote immediately before andafter impact, respectively (Fig. 1). The inputs to theimpulse–momentum eqns. 1–3 are pre-impact angleθ0, measured between the line from ankle to CM andvertical, angular velocity ω0, and horizontal andvertical CM velocities vx0 and vy0, respectively (experi-ments used to determine Icm, Hcm, vx0 and vy0 aredescribed below). Eqns. 1–3 are solved for theimpulses required to stop the feet, ϑx and ϑy, and thepost-impact angular velocity, ωi. Assuming that thefeet stop implies that vxi = ωi r cos θi and vyi = ωi r sin θi
where θi = θ0 + (ω0 + ωi)Δt/2. Impact may cause ωi to vanish completely with the
CM between the toe and heel, allowing standingwithout active balance. However, gymnasts canbalance over a wider range of impact configurationsand velocities using time-varying muscular torques.Post-impact balance generally involves all joints, but aconservative approximate balance model allows atten-uation of ωi using only ankle moments due to aconstant GRF (~mg, see Fig. 1) applied between thetoe and heel (Fig. 2b). The body is assumed to berigid, so only the limited torque exerted about theankle could accelerate the CM and contribute to theGRF deviating from 1 BW. Assuming that balance isonly possible if the CM stops (ωf = 0) above the feet,between the toe and heel, at a final angle θf using thelimited ankle moments, the post-balancing staticboundaries can be calculated: θf min
= sin–1 (dt/r) andθf max
= sin–1 (dh/r). The static balance boundaries areroughly equal to the foot length divided by the ankleto CM distance and are not unique because r varieswith the moment of inertia required to attain eachangular velocity, ω0, while conserving release Hcm.
Assuming that an ankle torque limited to a GRF ofone BW applied at the toe and heel is used to balance,it is possible to calculate minimum and maximumangles θimin
and θimax, respectively, from which balance
can occur. The given post-impact angular velocity ωi isused as one of the ICs in each of the balance differen-tial equations:
Iaθ..
min = mgr sin θmin + mgdt (4)
Iaθ..
max = mgr sin θmax + mgdh (5)
where dt and dh are horizontal distances from ankle totoe and heel, respectively, and Ia is the moment ofinertia about the ankle (Table 1). Eqns. 4–5 are used tosolve for the other unknown limiting ICs θimin
and θimaxthat allow the CM to stop over the feet usingmaximum control at toe or heel, respectively. Therange of balanceable post-impact angles θimin
< θi < θimaxis thus determined for a given ωi.
But the real question of interest is: for a given pre-impact ω0 what is the landing window or range ofbalanceable pre-impact angles θ0min
< θ0 < θ0max? The
landing window is calculated for all possibleω0min
< ω0 < ω0maxwhere ω0min
= Hcm/Imax and ω0max=
Hcm/Imin (Imin and Imax will be discussed in Fig. 3) usingthe following test algorithm for each candidate point[ω0, θ0]:
1 Choose ω0 such that ω0min< ω0 < ω0max
.2 Choose an arbitrary θ0 as a possible balanceable
landing angle.3 Use impact eqns. 1–3 to calculate ωi and θi.4 Use ωi and θi as ICs for the balance eqns. 4–5 to
calculate θf when ωf = 0.5 If θfmin
< θf < θfmaxthen θ0 was balanceable, and [ω0,
θ0] is a feasible landing state.
For a given ω0, the value of θ0 was gradually varieduntil θf = θfmin
(and consequently θ0 = θ0min) and then
increased until θf = θfmax(and θ0 = θ0max
). By calculatingthe landing window for all possible ω0 for a gymnastwith a constant angular momentum Hcm (Table 1), aband of landing windows or a balanceable region in theθ0, ω0 space is identified.
Gymnasts control angular velocity by varying Icm.Although the ranges {ω0min
, ω0max} above encompass all
ω0 at which landings can occur with the given Hcm andcontrolled Icm, it was not verified that a given θ0 wasachievable for the corresponding ω0. Nevertheless, thegymnast should be able to access most, if not all θ0
given in the results because Icm can vary (6.63< Icm < 13.05 kg m2) over short periods (~0.2 s)compared to the longer flight time (~1 s).
If θ0 < θ0min, the gymnast cannot create a large
enough moment using the GRF at the toe and will fallforward, whereas if θ0 > θ0max
the gymnast fallsbackward. When contact conditions [θ0, ω0] lie within
212 Sports Engineering (2007) 10, 209–220 © 2007 isea
Dynamic approximation of balanced landings A.L. Sheets
10.4.3 Sports F76 14/5/08 14:56 Page 212

the band of landing windows, the model predictsbalance is possible using only ankle torques.Understanding the relationship between θ0 and ω0 isnecessary to determine general balancing strategies.
The impact and balance model body segmentparameters and initial conditions were measured using afemale collegiate gymnast who had provided informedconsent. Inertial parameters were calculated using 95measurements (Yeadon, 1990, Table 1). Dismount pre-impact conditions were experimentally determinedusing motion analysis techniques for two single- andtwo double-backward somersault dismounts with thebody fully straight. The arms remained above the headduring the single-somersault dismount and the droppedto the sides after release during the double. Angularmomentum (Hcm) and horizontal and vertical CMvelocity (vxr and vyr, respectively) at bar release for eachtrial were calculated and averaged for the single- anddouble-somersault performances. Hcm and vxr wereassumed to remain constant during flight, and impactconditions were calculated from release conditions(Table 2) using vx0 = vxr, vy0 = vyr – gt.
Although the experimental gymnast maintained astraight body position during dismount flight, a rangeof simulated body configurations was investigated
(from straight to tucked) because the effect of pre-impact angular velocities on balanceable pre-impactconfigurations is of interest in this paper. Even thoughthe simulated gymnast impacts with numerous bodyconfigurations, an experimentally determinedconstant flight Hcm is assumed for the one- and two-somersault dismounts.
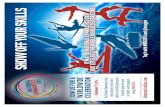
With constant flight Hcm the gymnast must changeher Icm to achieve different ω0, but as Icm changes sodoes the radius from ankle to the mass centre, r. Tocalculate r as a function of the Icm at landing (Fig. 3), aflight simulation was used. The body configurationwas changed from straight with the arms above thehead (Imax) to maximally tucked (Imin) while rotatingwith the measured double somersault Hcm of123.67 kg m2 s–1. Hips, knees, and shoulders wereflexed using maximal exertion, assuming a nominal setof joint torques (Cheng & Hubbard, 2005). Thetorques were calculated by multiplying a maximumisometric joint torque by functions of joint angle,angular velocity and exertion, and the amount of tuckwas limited by gymnast strength. Mass centre locationand Icm were calculated at discrete times as body con-figuration changed to create the relationship betweenr and Icm shown in Fig. 3. Although tighter tucks arepossible during a single somersault, the same relation-ship was used for both dismounts because landings intightly tucked positions are unlikely.
© 2007 isea Sports Engineering (2007) 10, 209–220 213
A.L. Sheets Dynamic approximation of balanced landings
Table 2 Experimentally measured gymnast release and pre-impactangular momentum and CM velocities
Hcm vx0 Bar release Pre-impact(kg m2 s–1) (m s–1) vyr (m s–1) vy0 (m s–1)
Single-revolution 69.52 1.22 4.47 –6.88Double-revolution 123.67 2.44 3.87 –6.51
Abbreviations:dt and dh are horizontal distances from ankle to toe and heel, respectively.Imax is the gymnast’s maximum moment of inertia about the mass centre (CM)when the body was straight with the arms above the head.Imin is the minimum moment of inertia about the CM when the gymnast ismaximally tucked while rotating with the measured double-revolution Hcm of123.67 kg m2 s–1.Hcm is the flight angular momentum.vxr and vyr are horizontal and vertical CM velocity at bar release, respectively.vx0 and vy0 are pre-impact horizontal and vertical CM velocity, respectively.
Table 1 Gymnast size and mass properties
Height (m) Mass (kg) dt (m) dh (m) Imin (kg m2) Imax (kg m2)
1.71 72.5227 0.19 0.05 6.63 13.05
Imax
Imin
Rad
ius,
r, f
rom
ank
le to
CM
(m
)
0.90
0.85
0.80
0.75
0.70
0.65
6 8 10
Moment of inertia about the CM (kg m2)
12 14
rmax
rmin
Figure 3 Radius from ankle to CM as a function of the moment ofinertia of a typical female collegiate gymnast
10.4.3 Sports F76 14/5/08 14:56 Page 213

Results
Following a single- or double-backward somersaultdismount, to land balanced the gymnast must increasepre-impact forward lean, –θ0, as the pre-impactangular velocity, ω0, increases (Fig. 4). Even thoughforward lean increases with ω0, the CM must bebetween the toe and heel at impact in order to balanceafter one somersault for all ω0. This means that thepre-impact balance boundaries ([θ0min
, ω0], and [θ0max,
ω0]) lie inside the static landing window, the bound-aries of balanceable configurations if the angularvelocity were zero (Fig. 4). For the double-somersaultdismount, the gymnast must also land with her CM
inside the static balance boundaries for all but thelargest ω0 (Fig. 4). For the gymnast to balance withthese large values of ω0, the CM must be slightly infront of the toe, or outside the static balance window.During impact the body continues to rotate about theankle (Δθ = θi – θ0) and large ω0 are attenuated, whilesmaller orientation and velocity changes occur duringthe balance phase.
Body orientation changes (Δθ = θi – θ0) duringimpact increase with ω0, causing the gymnast tocontact the ground with more forward lean (a larger|–θ0|) to end balanced after a single- or double-som-ersault dismount (Fig. 5). For almost all successfully
214 Sports Engineering (2007) 10, 209–220 © 2007 isea
Dynamic approximation of balanced landings A.L. Sheets
20
15
10
5–0.4 –0.35 –0.3 –0.25 –0.2 –0.15
θ0 (rad)
–0.1 –0.05 0 0.05 0.1
ω0
(rad
s–1
)
θ0 maxfall backwardboundaries
θ0 minfall forwardboundaries
double revolutiondynamic balance
landing region
single revolutiondynamic balance
landing region
double revolutionstatic balancelanding region
single revolutionstatic balancelanding region
Figure 4 Bands of dynamic balanceable landing windows, sets of[θ0, ω0], and static balance windows following single- and double-backward revolution dismounts
10.4.3 Sports F76 14/5/08 14:56 Page 214

balanced landings, the CM begins in front of the ankleand rotates past the ankle during impact (yieldingpositive θi).
During the 0.04 s impact, the angular velocityslows significantly and can change direction if ϑy andϑx that stop the feet are large enough. After a single- ordouble-backward somersault dismount, there isforward rotation at the end of impact (ωi < 0) if groundcontact occurs on the fall forward boundary (θ0min
,Figure 6); therefore, after impact a torque must beproduced using the GRF at the toe to not fall forward.If a single-somersault dismount is landed in themaximum balanceable θ0, for most ω0 a small ωi results
in the same direction as during flight (Fig. 6). Balancewould be attained by exerting a torque created by aGRF at the heel. Most pre-impact θ0 result in forwardrotation (ωi < 0) after impact because a larger torquecan be created with the toe than with the heel.
Larger pre-impact CM horizontal and verticalvelocities, vx0 and vy0, require larger linear impulses tostop the feet (Fig. 7). Although the double-somersaultdismount has a slightly smaller vy0, its vx0 is twice aslarge as that of the single-somersault dismount,causing ϑy to be smaller and ϑx to be much larger,respectively. Also, |ϑy| increases only slightly as |θ0|increases for both dismounts, although ϑx varies more.
© 2007 isea Sports Engineering (2007) 10, 209–220 215
A.L. Sheets Dynamic approximation of balanced landings
Figure 5 Regions of post-impact body position, θi, resulting fromimpact in a given pre-impact orientation, θ0, following a single- anddouble- backward revolution dismount
0.14
0.12
0.1
0.08
0.06
0.04
0.02
–0.02
–0.04
0
–0.06–0.4 –0.35 –0.3 –0.25 –0.2 –0.15
θ0 (rad)
–0.1 –0.05 0
θ i (r
ad)
θ0 max fall backward boundary
θ0 min fall forward boundary
θ0 min boundary
θ0 max boundary
ω0 max
ω0 max
ω0 min
ω0 min
Double revolution
Single revolution
Single
Double
10.4.3 Sports F76 14/5/08 14:56 Page 215

216 Sports Engineering (2007) 10, 209–220 © 2007 isea
Dynamic approximation of balanced landings A.L. Sheets
Figure 6 Post-impact angular velocity, ωi, resulting from impact at agiven θ0 following single- and double-backward revolution dismounts
0.2
0
–0.2
–0.4
–0.6
–1
–0.8
–1.2–0.4 –0.35 –0.3 –0.25 –0.2 –0.15
θ0 (rad)
–0.1 –0.05 0
ωi (
rad
s–1 )
θ0 max fall backward boundaries
Post-impact backward rotation
Post-impact forward rotation
θ0 min fall forward boundaries
ω0 maxω0 min
Double revolution
Single revolution
–40
–60
–80
–100
–120
–140
–160
–180–0.4 –0.3 –0.2 –0.1 0
θ0 (rad)
x-di
rect
ion
impu
lse,
ϑx
(N s
)
530
525
520
515
510
505
500–0.4 –0.3 –0.2 –0.1 0
θ0 (rad)
y-di
rect
ion
impu
lse,
ϑy
(N s
)
θ0 max fall backward boundary
θ0 min fall forward boundary
θ0 max fall backward boundary
θ0 min fall forward boundary
ω0 max
ω0 max
ω0 min
ω0 minSingle revolution
vx0 = 1.22 m s–1
Doublerevolution
vxo = 2.44 m s–1
Single revolutionvyo = –6.89 m s–1
Double revolutionvyo = –6.51 m s–1
Figure 7 X- and y- direction impulses required to stop the feetfollowing single- and double-backward revolution dismounts
10.4.3 Sports F76 14/5/08 14:56 Page 216

The landing window width (range of balanceable θ0,θ0max
–θ0min) for a single- and double-somersault
dismount increases with angular velocity (Fig. 8).Although the landing window is slightly larger at largevalues of ω0, the gymnast is in controllable landingorientations longer when ω0 is smaller (Fig. 9).
post-impact angular velocities ωi need not be exactlyzero, but rather only small enough to attenuate there-after using ankle joint torques. General landingstrategies for a single- and double-backward somer-sault dismount were calculated using this model.
To balance after either dismount, a gymnast mustimpact the ground with the CM between the toe andheel for almost all ω0 (Fig. 4). This finding is differentfrom previous experimental results (McNitt-Gray etal., 2001) of successfully balanced landings followingbackward or forward single-somersaults with lowerangular velocities, and initiated from a lower height(0.6 m instead of 2.4 m). This is because in theprevious study the gymnast either rotated backwardand travelled backward or rotated and travelledforward, while in this simulation the gymnast rotatedbackward and travelled forward. In the McNitt-Graystudy, vx0 was in the opposite direction, ϑx creates anangular impulse about the CM to increase the wholebody angular velocity (eqn. 3), and the contribution ofϑy to the angular impulse was smaller than in adismount because vy0 was only half as large.
With larger ω0 and smaller Icm, a gymnast mustimpact with a larger angle relative to vertical |–θ0|than one with larger Icm and smaller ω0. This isprimarily because changes in body orientation duringimpact increase with ω0, because ω is assumed to slowlinearly; so there must be more forward lean to end ina balanceable configuration after rotating farther.
Vertical and horizontal impulses, ϑy > 0 and ϑx < 0,create large negative angular impulses about the CM,opposing the positive Hcm, and can result in either apositive or negative ωi (Fig. 2a). When the gymnastcontacts the ground inside the band of landingwindows with [θ0, ω0] closer to the fall-forward thanthe fall-backward boundary (Fig. 4), the impactimpulses cause ω to change direction, resulting in anegative ωi and thereafter balance occurs using theGRF at the toe (Figs. 2, 4 and 6). However, forlandings closer to the fall-backward boundaryfollowing a single somersault, the angular impulses aretoo small to result in positive ωi and the gymnast mustbalance with the GRF at the heel (Figs. 2, 4 and 6).Most balanceable [θ0, ω0] result in forward lean (–θ0)and/or rotation (–ω0) because a larger moment can becreated using the GRF at the toe than at the heel dueto the longer moment arm (Figs. 5 and 6).
© 2007 isea Sports Engineering (2007) 10, 209–220 217
A.L. Sheets Dynamic approximation of balanced landings
Figure 9 Time in balanceable θ0 range decreases as ω0 increasesfollowing single- and double-backward revolution dismounts
Figure 8 The range of balanceable pre-impact landing orientationsincreases as pre-impact angular velocity increases followingsingle- and double- backward revolution dismounts
0.105
0.100
0.095
0.090
0.085
0.080
0.0755 10 15 20ω0 (rad s–1)
θ 0 m
ax –
θ0
min
(ra
d) Single revolution
Doublerevolution
*
^
* Imin, ω0 max^ Imax, ω0min^
*
0.015
0.014
0.013
0.011
0.01
0.009
0.007
0.008
0.006
0.0055 10 15 20
ω0 (rad s–1)
Tim
e (s
)
Single revolution
Doublerevolution
*
*
^
^
* Imin, ω0 max^ Imax, ω0min
Discussion
The previous results indicate that a two-part model isneeded to investigate gymnastics landings becauselarge changes occur in θ and ω during impact and
10.4.3 Sports F76 14/5/08 14:56 Page 217

The double-somersault dismount requires a largerflight Hcm than a single-somersault dismount (Table 1),and during impact Hcm is attenuated by the contribu-tions of the linear impulse to the angular impulse. Thevalue of vx0, and consequently the value of ϑx requiredto stop the feet, is approximately twice as large for thedouble (Table 2), while vy0 and ϑy are similar for thetwo dismounts (Fig. 7). The ϑy following the singlesomersault was slightly larger than with the doublebecause the flight time was slightly longer: 1.06 s and1.16 s, respectively. Following both dismounts forlanding orientations near vertical, the value of ϑx con-tributes slightly more to the angular impulse than ϑy,even though ϑy is between two and ten times larger,because the impulse moment arm is much longer(eqn. 3). Although ϑy does not vary much with changesin θ0, it contributes more when the gymnast is leaningfarther forward at impact, because small increases in|θ0| cause roughly proportional increases in the hori-zontal ϑy moment arm. The total angular impulsecreated by the linear impulses to slow Hcm is alsoaffected by changes in ω0 because impulse momentarm length r varies with values of Icm.
These results could be used to improve gymnastlanding consistency by determining the single bal-anceable [θ0, ω0] that provides the largest margin oferror. Although as ω0 increases there are more valuesof θ0 that are balanceable for a given ω0 (Fig. 8), thegymnast is in controllable landing orientations longerwhen rotating more slowly (Fig. 9) and as a result maybe more likely to end balanced. A similar definition forrobustness in gymnastics was introduced by Hiley &Yeadon (2003). Also, the gymnast is appropriatelyoriented following a single-somersault dismount forlonger than after a double-somersault dismount, forall possible pre-impact angular velocities. It isprobable that the most robust landing strategy wouldinclude consideration of both how close the point [θ0,ω0] is to a fall boundary and the value of ω0.
Although conclusions can be drawn from thepresent study, future models should evaluate thevalidity of the assumptions that the gymnast:
1 is able to remain rigid during impact2 rotates only about the ankle during balance3 applies a constant GRF4 GRF is limited to 1 BW5 applies the GRF at the end of the toe or heel.
Assumptions 2–4 underestimate the gymnast’s controlcapabilities; therefore it is probable that the presentedsuccessful landing windows slightly underestimate thesize of the actual [θ0, ω0] regions.
Because impact time is so short, the assumptionthat the gymnast does not actively control joint anglechanges is probably good. The muscles must be pre-activated before impact because the 0.04 s time ofimpact is much shorter than human reaction time.
Although some joint motion is likely during impact,the rigid body assumption may be adequate for under-standing the relationships between θ0, ω0, vx0, and vy0
during impact and balance. If the joints did move, theeffect would be to shorten the radius from the ankle tothe CM, thus decreasing the linear impulse contribu-tions to angular impulse, increasing angular velocity.This would allow for balance after contacting theground with the CM farther forward than predicted(–θ0 < θ0min
), but may also cause a fall backward if contactoccurs at the θ0max
boundary. Joint motion duringimpact could also increase the balanceable [θ0, ω0] com-binations due to moments created by limb acceleration.
It is possible that the single-segment dynamicbalance model produces realistic results because theslightly overestimated length of the functional base ofsupport increases the landing window size, and thuscompensates for the conservative ankle torque limita-tions and simplified joint control strategy. In reality,balance involves multiple joints and the functional baseof support is shorter than the foot, and varies accordingto age and a number of unknown factors (Patton et al.,1999). Iqbal & Pai (2000) found that increasing balancemodel complexity to include control at the hip, kneeand ankle joints expanded the balanceable region, mostnotably for small angular velocities and initial CMpositions farther outside the base of support in thedirection opposite CM velocity. It is likely that the bal-anceable region would also expand if a more complexbalance model were used in this study.
By combining approximate impact and balancemodels, other gymnastics landings with different pre-impact angular and linear velocities may beinvestigated (eg. forward rotation and forward transla-tion or backward rotation and backward translation).Alternatively, more complex models that remove someof the present model’s limiting assumptions may findlarger sets of balanceable landing regions.
218 Sports Engineering (2007) 10, 209–220 © 2007 isea
Dynamic approximation of balanced landings A.L. Sheets
10.4.3 Sports F76 14/5/08 14:56 Page 218

ReferencesArampatzis, A., Morey-Klapsing, G., & Bruggemann, G. P.
(2003) The effect of falling height on muscle activityand foot motion during landings. Journal ofElectromyography & Kinesiology, 13, 533–544.
Cheng, K.B. & Hubbard, M. (2005) Optimal compliant-surface jumping: a multi-segment model of springboardstanding jumps. Journal of Biomechanics, 38, 1822–1829.
Gittoes, M.J.R., Brewin, M.A. & Kerwin, D.G. (2006) Softtissue contributions to impact forces simulated using afour-segment wobbling mass model of forefoot-heellandings. Human Movement Science, 25, 775–787.
Gruber, K., Ruder, H., Denoth, J. & Schneider, K. (1998)A comparative study of impact dynamics: wobbling massmodel versus rigid body models. Journal of Biomechanics,31, 439–444.
Hiley, M.J. & Yeadon, M.R. (2003) The margin for errorwhen releasing the high bar for dismounts. Journal ofBiomechanics, 36, 313–319.
Hof, A.L., Gazendam, M.G.J. & Sinke, W.E. (2005) Thecondition for dynamic stability. Journal of Biomechanics,38, 1–8.
Iqbal, K. & Pai, Y.-C. (2000) Predicted region for balancerecovery: motion at the knee joint can improvetermination of forward movement. Journal ofBiomechanics, 33, 1619–1627.
McNitt-Gray, J.L. (1991) Kinematics and impulsecharacteristics of drop landings from three heights.International Journal of Sports Biomechanics, 7, 201–204.
McNitt-Gray, J. L., T. Yokoi & Millward, C. (1993)Landing strategy adjustments made by female gymnastsin response to drop height and mat composition.Journal of Applied Biomechanics, 9, 173–190.
McNitt-Gray, J.L., Hester, D.M.E., Mathiyakom, W. &Munkasy, B.A. (2001) Mechanical demand andmultijoint control during landing depend on orientationof the body segments relative to the reaction force.Journal of Biomechanics, 34, 1471–1482.
Nigg, B.M. & Liu, W. (1999) The effect of muscle stiffnessand damping on simulated impact force peaks duringrunning. Journal of Biomechanics, 32, 849–856.
Pai, Y.-C. & Patton, J.L. (1997) Center of mass velocity-position predictions for balance control. Journal ofBiomechanics, 30, 347–354.
Pain, M.T.G. & Challis, J.H. (2002) Soft tissue motionduring impacts: Their potential contributions to energydissipation. Journal of Applied Biomechanics, 18(3),231–242.
Pain, M.T.G. & Challis, J.H. (2006) The influence of softtissue movement on ground reaction forces, jointtorques and joint reaction forces in drop landings.Journal of Biomechanics, 39, 119–124.
Patton, J.L., Pai, Y.-C. & Lee, W.A. (1999) Evaluation of amodel that determines the stability limits of dynamicbalance. Gait & Posture, 9, 38–49.
Seegmiller, J. G. & McCaw, S. T. (2003) Ground reactionforces among gymnasts and recreational athletes in droplandings. Journal of Athletic Training, 38, 311–314.
Yeadon, M.R. (1990) The simulation of aerial movement.II. A mathematical inertia model of the human body.Journal of Biomechanics, 23, 67–74.
© 2007 isea Sports Engineering (2007) 10, 209–220 219
A.L. Sheets Dynamic approximation of balanced landings
10.4.3 Sports F76 14/5/08 14:56 Page 219