A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System

of 4
-
Upload
kiran-kumar -
Category
Documents
-
view
219 -
download
0
Transcript of A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System
-
8/8/2019 A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System
1/4
A DETERMINISTIC APPROACH TO BLIND IDENTIFICATION OFMULTI-CHANNEL FIR SYSTEMS*
Hui Liu, Guanghan XuDept. of Electrical & Computer Engineering
Austin, $X 78712-1084The Universit of Texas at Austin
AbstractConventional blind channel identification algorithmsare based on channel outputs and the knowledge of theprobabilistic model of a channel input. In some practicalapplications, however, the in put statistical model may notbe known, or there may not be sufficient dat a t o obtain ac-curate enough estimates of certain statistics. In this paper,we consider the system input to be an unknown deterniin-istic signal and study the problem of blind identificationof a channel which can be decomposed into multichannelFI R systems driven by a input signal. A new determinkticblind identification algorith m based solely on the systemou tp uts are proposed. h'ecessary and sufficient identifiabil-ity conditions concerning the channel and the deterministicinput signal are also presented.
1 IntroductionSince Sato [l ] irst proposed the innovative idea of self-recovering (blind ) adaptive identification, blind channelidentification and equal ization, as a research problem, hasbeen extensively studied by many researchers [2, 3, 4 , 5 , S]and significant progress has been made in this area. How-ever, the above existing blind identifiation methods arebl ind only in the sense that they do not require the ex-plicit knowledge of the system (channel) input; they allrequire the same statistical assumption of the input, e.g.,all th e input symbols ace white. In many practical situa-tions, such as a fast Raleigh fading environment, however,the knowledge of the input may not be available, or thereare not enough da ta samples to acquire a reasonably wcu -rate statistical estimate. In this case, the input may onlybe treated as an urbitrury deterministicsignal. This bringsup a new challenge in the u e a of channel identification: Isit possible to identify channel(s) without any knowledgv ofthe input?In this paper, we show tha t, under certain conditions, it
is possible to achieve blind identification of FI R channelsbased o n l y on the channel outputs. A deterministic algo-rithm of blind channel identification is presented. Moreimportantly, we also obtained the sufficient and necessaryconditions under which such blind identification is possi-ble. The basic idea behind this deterministic approach isto exploit different exhibitions of the same input signal bymultiple FI R channels. Here, the concept of multichan-nel should not be limited to multiple physical receiversor sensors. Temp eraly ove [sampled dig it d communication"'Thiswork is supported in part by University Research In-
stitute at the Ilnivrraity d exas at Austin
Lang TongDept. of Electrical L S stems Engineeringuniversity of ZonnecticutStorrs, CT 06269-3157
signals can also be modeled as a multichannel system [6].linlike most of the probabilistic methods, our algorithmis parametric and it only involves solving a set of linearequatio ns, which may lead to simple implementa.tion. Sim-ulation results show that the identification can be realizedbased on only 50 output da ta symbols. Let us begin ourdiscussions with the problem statement.2 Problem Statement
Consider a baseband communication problemz ( t )= C s ( k ) h ( t- kT) n(t), (1)
k
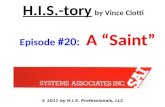
where a typical channel impulse response h ( l ) is given inFigure 1.
Figure 1: Special Channel wi th L = 2 .Without loss of generality, we will establish our datamodel for the special case that h( t ) lasts for L = 2 baudperiod T. If we oversample z ( t ) , Le . , T, = T / M , andcollect the dat a samples of each baud period t o form thenew vectors x k = [ z ( M k ) , z ( M k + l ) , . .z ( M k + M - l ) I T ,we have
x(k) = h(a)s (k-2)+h(l)s (k - l )+h(O)s(k)+n(k). 2 )where nk donates th e white noise. Let us look at the t t h el-ement +,(k) of x ( k ) , and express it in te rms of the symbolst.9(k)}:
%(k) = h , ( l ) s ( k- ) + h,(l)s(k - 1)+ h,(O)s(k) + , ( e ) ,(3 )
IV-5810-7803 -1775-0 /94 $3.00 0 1994 IEEE
-
8/8/2019 A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System
2/4
where n , ( k ) s the i t h element of n h and h , ( k ) denotes thei t t i element of h(n). n = 0 , 1 , 2 . For general cases, i . e . .I. # 3 , ( 3 ) becomes
L- 1
z , ( k )= x h , ( l ' ) s ( k I ) = h , ( k )0 ( k ) , (4 )where 0 enotes convolution. Spati al oversampling. i . e .the same signal is sampled via multiple receivers, can hr,treated the same way as temporal oversampling and (4 )still holds.Th e blind channel identification problem can be state dw follows: given the observatio ns of chunnel output { x ( k ) ]or {z,(k),i= 1 , . . . M . k = 0, . . , N ) , es t imate the chan-ne l {h,( . ))E, . Blind chan nel equal iza tion i s to further es -t imate the sour ce s igrra ls Is(.)}.
1= 0
3 The Proposed Algorithms , ( k ) ,
By (4), for any pair of two noise-free outputs r , ( t ) ndr , ( k )= h,(k) G ) . g ( k ) , z,(k) =: h l ( k ) C s(k1, (51
where (1) ndicates convolution. Thenh , ( k ) i . ) z * ( t )= h j ( k ) O ( h , ( k ) O s ( k ) l= h , ( k ) O ) j h , ( t ) O s ( k ) ) h . ( k ) O ~ , ( k ) . ( 6 )-= , ( k )The above equation shows that the outputs of each chan-nel pair are l inearly related by their channel responses.ITearly, if we have adequate data samples of the outputs,by (6), we can write out an overdetermined set of linearequations involving h , ( . ) and h j ( . ) , Under certain condi-tions which we will elaborate later, h , ( . ) and h , ( . ) can bedet.ermined uniquely np to a scalar multiple. Th e use ofsurh a cross relation between each output pair is the basicklea behind our deterministic blind channel identification.Note that this structure is not availa.ble in single channelsystem.More specifically. for k = 1 , . , N , where N is the niim-her of synthols in t.he received data z , ( k ) and z , ( k ) , (ti)becomes N - L + 1 linear equations involving h , ( . ) andb , ( . ) :
. ..
x , , , ( , A - L ) z " , ( N : L i - l ) . ..(8)
For each pair of ( z , ~ ) , we can always write out. a setHere we propose to combine all of'The equation f o r t w o channels i j similar to n specialcase of the algorithm independently developed by Giirelli andNikias [7].
X ," (L )=
(i f linear equations'.
them and write a larger set of linear equations in terms ofh l , . ,h, or simply h = [ h l , . , hLIT nd solve all thechannel responses s imultaneous ly . Denote X ' ( L ) as
A
( M - i )0 ' . . 0 Xi+,(L) -X,(L) 0 00 .. . 0 XM(L) 0 " ' -X,(L)' . 0
where each block, e . g . , 0 or {Xm(Z)}, as the size, i . e . ,(N - L + 1) x (Z 1) . In the noise free case, h s in thenull space of the following large matrix.
where the actual size o f X ( L ) is of (N-L+l)- X(Z+1)(M+ 1). When th e channels are corrupted by noise, wecan estimate h by solving a least squares problem shownbelow:'
where h is subject to certain nontrivial constraint, e . g . ,Ilhll = 1 or c"il = 1 for some constant vector e . Notethat the deterministic blind identification problem formu-lated above is linear whereas most statistical approachesare nonlinear. Alt.hough the size of the ma trix X may belarge for large N , M , an d L, he computation cost may bereduced by exploiting the sparsity and the block Hankelstructure of this matrix.3.1 Detection of Channel Order L
In the above, we assumed that the maximum order ofmultiple channels L is known. In practice, it is not nec-essarily true and the first step is to detect the maximumorder L . One method of estimate L is constructing theabove X using a larger order L e ( > L ) and checking itsrank. Let us first consider the noise-free case. If we usea larger order L , and form X, (L , ) as in (8) . We notethat first L + 1 columns of X , ( L , ) is a subset of the ma-trix X,(L). By taking account of all the possible pairs of{X, ,Xj} , we can claim that any linear combination of th efollowing L , - L + 1 vectors-L,-L L e - L - ,n
is a solution 1,o X(L,)h = 0, Z, > L . We can showthat the vectors in (11) span the null space of X(Ze). herank of X will be Y~ = ( L , + 1)(M + 1) - L e - L + 1) =hfL, + ibf + L . Therefore, L can be easily determinedby checking the rank of X ( L , ) . I C there is additive noise,we can detect I,, - L + I n by checking how many smallersingular values of X are close to one another (on). Moreobjective criteria such as MDL,AI C can also be used todetect L .
IV-582
-
8/8/2019 A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System
3/4
3. 2 Basic Algorithmic Procedure1. Form X(L,) as in (9 ) based on an o u e r e s t i m a t e d o r d e rL..2 . Perform an S V D or FSD to estimate how muchsmaller singular values are the n o i s e singular values
and detect the maximum channel order L.Use the estimated L to form X(L) as in (9) and findh subject to some nontrivial constraint to minimizeFrom h, we can have t.he channel responses for all thechannels, i . e . , h j , . . , hM .
3
IlX(L)hll.1
Now we have the algorithm for multichannel blind iden-What is not clear is whether or not the trueification.channel responses are t he unique solution of ( 1 0 ) .4 Identifiability Conditions
Identifiability conditions .have been extensively studiedin system identification [ 8 , 91. However, blind channe lidentification and conventional system identification aredifferent since the latter assumes that the input signalsare known and controllable while the former does not. Tostudy identifiability conditions of the proposed approach,two issues need to be considered (1) the condition of theidentifiable channels; (2) the condition cf the input. Thesetwo conditions may not be decoupled.Observation:The m u l t ic h a n n e l s y s t e m c m e i d e n ti f i ed un i q u e ly b y solv-ing l inear equa t ions Xti = 0 iff the da ta ma tr ix X .r ofrank M ( L + 1)- 1.l'he following three theo rems give more explicit expres-sioiis and provide more insight. Due tu space limitation,we cannot provide proofs of the following theorems, whichwill appear in the full paper [lo].Theorem 1 (Sufficient Condition) Th e bhnd ide ntifi-ca l ion prob lem f4ns a i ~ n i q u z o lu t i o n i f
I . the po lynomia ls { h , ( z ) ] E l are copr ime or do notshare any common roo ts ,2. t h e i n p u t { s ( i ) , i = 1 , . ..,A') as 2L + 1 or morem o d e s , o r i t can be ezpresse d a8 a l inear sum of 2 L + 1e x p o n e n t i a l s ,w h e r e h . ( z ) = h , ( O ) + h , ( l ) z - ' + - . . and L i s the maz imurnorder among { h , z ) ] z l
I n fact, these conditions are the same ~ t shose for identi-fying a rational function with th e denominator and numer-ator both of order I,191. It is true that, our system is onlyof order L , and can be sufficiently identified wit.h kiiowninput of L + 1 modes (so metime s referecd t o as persistcntexcitation of order L $- 1 [a]). For blind identification, t,heinput is unknown and th e order requirement on the input.becomes 2 L + 1 . This relation can be shown more clearlyby rdormulating the blind identification problem to be astandard SIMO system identification prcrblem [IO].Theorem 2 (Necessary Conditions) T h e channels canno / be unrquely identrfi i:d zf ( i ) there i:r o c o m m o n zeros h a w d by all charanek , OT (2 ) th e input h a s less thun 1.+ 1moi1r.s.
# of Symbols 1 # of Receivers I Oversamp. R atem - m n I 3 I 3-I """ I I ISNR I Channel Length I # of Trials1 0 - 4 0 I 4T I 500
Table 1: Simulat ion ParametersBy Theorems 1-2 , if the coprime condition is satisfied,the channel is identifiable if p 2 2L + 1 and it is not if
p < L + 1. What happens when L + 1 2 p 5 2 L + I?The following two theorems will address this issue and givenecessary and sufficient identifiability conditions, in whichthe conditions on input modes and channels cannot bedecoupled, unlike those given in Theorems 1-2.Theorem 3 T h e s u f i c i e n t a n d n e c e s s a r y c o n d i t io n s fo rhl ind mul t ichannel ident i f i ca t ion can be stated as o ~ ~ o w s ,
1. the input s ( k ) has a t l eas t L + 1 + & m o d e sz .. ' z p ;2 . t h e is no p o l y n o m i a l g ( z ) of order be tween 1 an dP - 1 such tha t the fo l lowing equa t ion holds fo r e =1 , . . ( ,
where u ( z ) i s t h e c h a r a c t e r i s t i c p o l y n o m i a l of the in-p u t and { k ( z ) ] f = , can be any po lynom ia ls .If there exists such a g ( z ) which satisties (la), {k,] becomethe ambiguous channel response which are not identifiablebased on their outpu ts. An impor tant observation canbe made regarding the number of channels M . First, ifM = 1, then the bound goes to infinity and the channelsare not identifiable which makes sense. As M increases, itrequires fewer modes to identify the channels. When A4is reasonably large, the number of modes required on theinput is approximating L + 1 , which is the minimum num-ber of modes required in standard system identification.In other words, there are sufficient number of ,hannels,blind identification (with u n k n o w n s(.)) and conventionalsystem identification (with known s(.)) are not SO different.5 Simulation Results
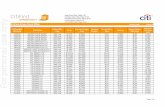
Computer siniulat.ions were conducted to intuitivelyevaluate the performance of the proposed algorithm incomparison to that. of the existing stochastic algorithm[6]. n this simulation, two antennas were used an d the re-ceived data were sampled twice of the symbol rate. T he in-put signal type is Q P S K . For simplicity of comparison, weassumed that the channel order L is known. The key sim-ulation parameters are also summarized in Table 1. Th eFIR channels are shown in Figure 2.In the first simulation st udy, we fixed the S N K to 20dBand varied th e number of symbols from 50 300. Figure 3sliows the Root-Mean-Squ are-Errors (RM SEs) of the chan-nel estimates from both the stochastic and deterministicmethods. From this figure, we can see th at th e determin-istic method always performs better than the stochasticmetho d, especially when th e number of symbols is small.
IV-583
-
8/8/2019 A Deter Minis Tic Approach to Blind Identification of Multi-channel FIR System
4/4
The main reason is that the stochastic metho d relies on thestatistical estimates of the received signal which are not soaccurate when we have a small number of data symbols.On the other hand, the deterministic method never as-sumes any knowledge of the input statistics and it is notso sensitive to the number of symbols.
In the second simulation study, we fixed the number ofsymbols to be 50 and varied the SNR from 10 - 40dB.Figure 4 gives the RMSEs of the channel estimates fromthese two methods. Despite the fact tha t the deterministicmethod always surpass its counterpart, it is interesting toiiote that the performance curve of the stochastic methodliats out after the SNR reaches 20dB, while that of theproposed method still declines. This is due to the samefinite data effect which cannot be cured by increasing SNR.However, since the additive noise is the only cause of theestimation error in the deterministic method, an increaseof SNR certainly leads to its performance improvement6 Conclusions
In this pap er, we present a blind al gorithm for identify-ing multichannel FIR systems with an unknown determin-istic input. The algorithm based solely on the system out-puts and it only involves solving a set of linear equationsNecessary and sufficient identifiability conditions regard-ing the input and channels are derived, which are useful infurther algorithm development of deterministic blind identification. Computer simulations results demonstrat e thept en ti al of the proposed algorithm.
1 ..... .........$. . . . . . . . . . ................................, .......................
4 6 6R s m i v e t i eal part
.......
........... ............... l 2 4 6 6Rnwber 2: eal pa n
..... ...
Receiver 1: lmginar/part
........ .......
.... ..... .Reoeiver2: mginaIypan
Figure 2: Chitnnel responses ctf t,wo receiversReferences[I] Y. Sato, A Method of self-recovering equaliza-tion for multilevel amplitude-modulation, IEEETrans. Commun., 23(6) :679-682 , June 1 9 7 5 .[Z ] A . Benveniste an d M . Goursat, Blind equalizers,IEEE Trans. Commun., 3 2 ( 8 ) : 8 7 1 - 8 8 3 , August 1.984.[3] J. K. Tugnait, Identificaiton of linear stochastic sys-tem via second and fourth-order cumulant match-ing, IEEE Tmns. Information Theory, I T - 3 3 : 3 9 3 -4 0 7 , May 1 9 8 i .[4] W . A . Gar dner , A New Method of ChannelIdentification, IEEE Trans. o n Communications,3 0 ( 6 ) : 8 1 3 - 8 1 7 , June 1991 .
Figure 3: Comparison of th e deterministic (solid) andstochastic (dash) meth ods for N = 50- 00.
Figure 4: Comparison of the determinist ic andstochastic methods for S NR = 10- 0 dB .[5] Z. Ding, R. A. Kennedy, B.D.O. Anderson, and C.R.Johnson, %-convergence of Godard blind equalizersin data communication systems, IEEE Trans. Com-munications, pages 1313-1337 , September 1991 .
Blind Identifica-tion and Equalization Based on Second-Order Statis-tics: A Time Domain Approach, To appear in IEEETrans. on Information Theory.[7] M.1. Giirelli and C.L. Nikias, A New Eigenvector-Based Algorithm for Multichannel Blind Deconvolu-tion of Input Colored Signals, In Proc. ICASSP93Conf., volume IV , pages 448-451 , Minneapolis, MN,April 1993 .
Persistency of excita-tion, suddicient richness and parameter convergencein discrete time adaptive control, System 4 ControlLetters, G:153-163, 1985.[9 ] L.Ljung, System Identification, Prentice-Hall, Engle-wood Cliffs, NJ , 1 9 8 7 .
[ I O ] G. Xu, H. Liu, T. Lang, and T . Kailath, A Determin-istic Approach to Blind Channel Identification, sub-mitted IEEE Trans. on Signal Processing, Dec. 1993.
[6] L. Tong, G. Xu, and T. Kailath,
[8] E. W . Bai and S . S. Sastry,
IV-584