
Huawei AR Series Service Routers V200R006C10 Security Target

NEWPRODUCTS
Stepper Motor and Driver Package
AR Series
High output torque
Motor and gearhead are delivered pre-assembled.
High-Efficiency Closed Loop Combination with Neugart PLE Planetary Gearhead
Lower Heat GenerationTemperature Distribution by Thermography
Comparison under the same conditions
No TuningYou can perform positioning quickly after a load change, etc., without adjusting any gains.
No HuntingBecause it uses a stepper motor, the AR Series does not hunt when stopped.
Rotor Position Detection SensorThe reliability is as high as a servo motor.
Sensor detects rotor position
What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX?FLEX is a collective name for products that support Industrial Network control via I/O control, Modbus (RTU) control, and network converters.These products enable simple connection and simple control, shortening the total lead time for system configuration.
0 20 40 60 80 100
80
70
60
50
40
30
20
10
0
Maximum Torque
Permissible Torque
Max. Output Torque
Nominal Output Torque
PLEConventional
Torq
ue [
N·m
]
Speed [r/min]
Speed-Torque-Characteristic - AR69 with Gear Ratio 40
Inpu
t Sig
nal
InputCounter
DeviationCounter
Rotor Position Counter Ex
cita
tion
Sequ
ence
Con
trol
Outp
ut E
lem
ent
Motor
Sensor
Normal (Positioning deviation is less than ± 1.8°)
Motor runs in open loop mode like a stepper motor.
During Overload Condition (Positioning deviation is ± 1.8° or more)The closed loop mode is engaged to maintain the positioning operation.
Closed Loop Control
Driver Type: - Built-In Controller Type - Pulse Input Type
Specifications are subject to change without notice.This catalogue was published in April 2014.
This product is manufactured at a plant certified with the international standards ISO 9001 (for quality assurance) and ISO 14001 (for systems of environmental management).
ORIENTAL MOTOR (EUROPA) GmbH www.orientalmotor.de
European Headquarters and Düsseldorf OfficeSchiessstraße 7440549 Düsseldorf, GermanyTel: 0211-5206700 Fax: 0211-52067099
For other countries – EU-Webshop: www.orientalmotor.eu www.orientalmotor.eu
ORIENTAL MOTOR (UK) LTD.www.oriental-motor.co.uk
UK HeadquartersUnit 5, Faraday Office Park,Rankine Road, Basingstoke,Hampshire RG24 8AH U.K.Tel: 01256-347090 Fax: 01256-347099
ORIENTAL MOTOR (FRANCE) SARLwww.orientalmotor.fr
France Headquarters56, Rue des Hautes Pâtures9200 Nanterre Cedex, FranceTel: 01 47 86 97 50 Fax: 01 47 82 45 16
ORIENTAL MOTOR ITALIA s.r.l.www.orientalmotor.it
Italy HeadquartersVia A. De Gasperi, 8520017 Mazzo di Rho (Ml), ItalyTel: 02-93906346 Fax: 02-93906348
ORIENTAL MOTOR CO., LTD.www.orientalmotor.co.jp
Headquarters4-8-1 HigashiuenoTaito-ku, Tokyo 110-8536, JapanTel: (03)6744-0361 Fax: (03)5826-2576
Printed in Europe UK/042014/VERS02©Copyright Oriental Motor (Europa) GmbH 2014
Network Converter
The network converter is a transducer that converts from thehost communication protocol to Oriental Motor‘s unique RS-485communication protocol. You can use the network converter tocontrol products supporting Oriental Motor‘s RS-485 in the hostcommunication environment.
Network Type Product Name
EtherCAT-Compatible NETC01-ECT
CC-Link-Compatible NETC01-CC
MECHATROLINK- II Compatible NETC01-M2
MECHATROLINK- III Compatible NETC01-M3
Product Line
MECHATROLINK- II CompatibleMECHATROLINK- II Compatible
MECHATROLINK- III CompatibleMECHATROLINK- III Compatible NETC01-ECT NETC01-M3NETC01-M2NETC01-CCPower Module
CPU Module
I/O Module
Power Module
CPU Module
Serial Communication
Module
Power Module
CPU Module
Industrial Network Module
Power Module
CPU Module
Pulse Generator
ModuleComputer
Serial Communication Board (RS-485)
Touch Screen (HMI)
c Industrial Network
a I/O b Modbus (RTU) b Modbus (RTU) Pulse Input
EtherCAT
CC-LinkMECHATROLINK-MECHATROLINK-
When controlled with I/O When controlled with serial communication
When controlled with a computer or touch screen (HMI)
When controlled with an Industrial Network
b RS-485
or
Network Converter
Handles a Variety of System Configurations
Built-in Controller (Stored Data) Type Pulse Input
Operating data is set in the driver and the operating data is selected and executed from the master controller. Connection and control with the master controller is done through either a I/O, bModbus (RTU)/RS-485, or c Industrial Network.
Operations are executed by inputting the pulses into the driver. The motor can be controlled using a positioning module (pulse generator) provided by the customer.
a I/O b Modbus (RTU)/RS-485 c Industrial Network
The functions of a positioning module (pulse generator) are built into the driver, allowing it to be connected directly to a controller or PLC to configure an operating system with I/O. Since no positioning module is required on the PLC side, space is saved and the system is simplified.
Operating data and parameters can be set and operation commands can be input using RS-485 communication. Up to 31 drivers can be connected to each serial communication module. Also, there is a function that enables the simultaneous start of multiple axes. The protocol supports Modbus (RTU), enabling connection with devices such as a touch screen (HMI) or PCs.
Use of a network converter (sold
separately) enables support
with EtherCAT, CC-Link or
MECHATROLINK communication.
Operating data and parameters
can be set and operation
commands can be input using
various communication methods.
5

3 42
AR 69 A C D -1- PLE 60 -10 Series Name AR :AR SeriesMotor Frame Size 46 42 mm 69 60 mm 911 85 mm Motor Type A: Standard (Single shaft) Power Supply Voltage C : Single-Phase 200-240 VAC
Blank: Pulse Input PackageDriver Type D : Built-In Controller Package
Cable length (Included) 1: 1 m 2 : 2 m 3: 3 m
a b c d e f g h i
a
b
c
d
e
f
g
h
i
Gear Series Name PLE: PLE Series
: : :
Gear Size 40 Ø40 mm 60 Ø60 mm 80 Ø80 mm: : :Gear Ratio 5, 10, 20, 40
Specifications of the PLE Gearhead
(1) These values refer only to the PLE Gearhead. The actual value depends on the motor combination. (2) These values refer to a speed of the output shaft of n2=100 r/min on duty cycle KA=1 and S1-mode for electrical machines and T=30°C(3) With key, at tumescent load (4) Allowable for 30,000 revolutions at the output shaft.(5) Allowed 1,000 times(6) Allowed operating temperature must be kept; other input speeds on inquiry(7) Sound pressure level; distance 1 m; measured on idle running with an input speed of n1=3000 r/min, ratio=5(8) Half way along the output shaft(9) Refering to the middle of the body surface
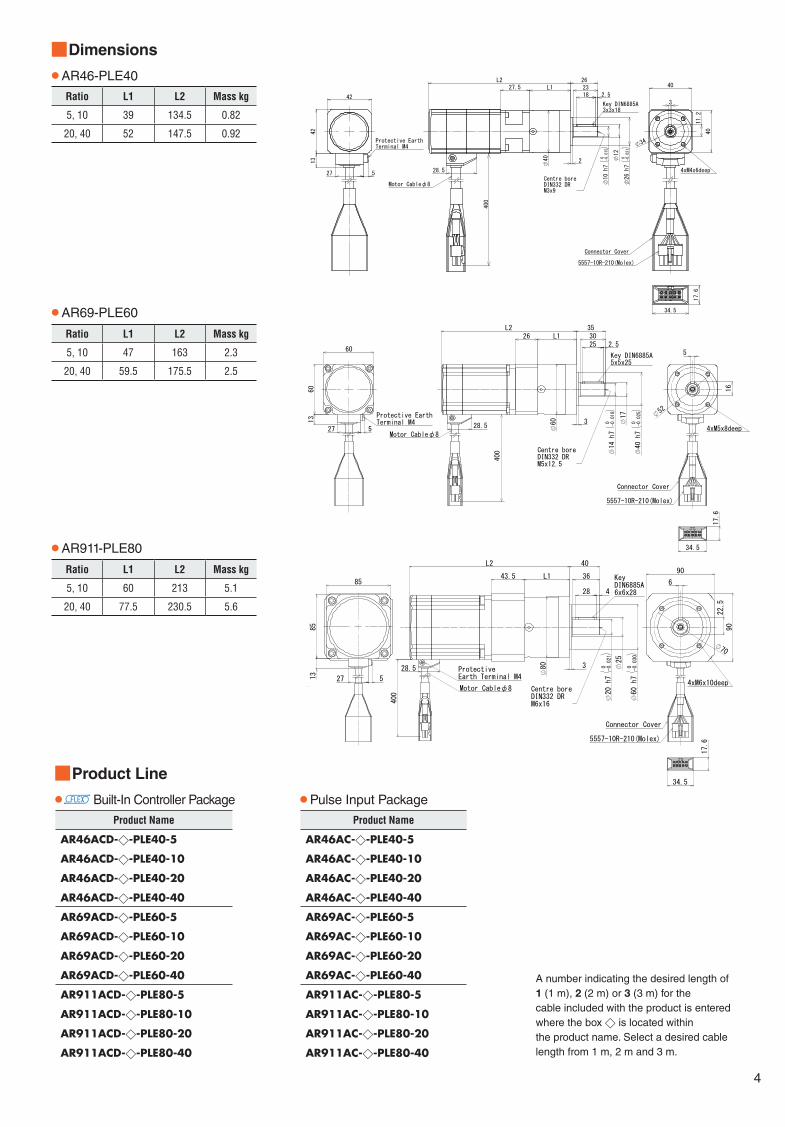
A number indicating the desired length of 1 (1 m), 2 (2 m) or 3 (3 m) for thecable included with the product is entered where the box ◇ is located withinthe product name. Select a desired cable length from 1 m, 2 m and 3 m.
Dimensions
Product Line
M5x12.5DIN332 DRCentre bore
Motor Cableφ8
5x5x25Key DIN6885A
26
14 h7
L2 35
28.5 60 17
-
30
0.018
0 3
40 h7 -0 0.025
L1
4xM5x8deep
Reduction ratio L1 L2 5,10 47 163 20,40 59.5 175.5
Connector Cover
5557-10R-210(Molex)
400
17.6
34.5
NEW DRAWING
-
DIMENSIONS IN MILLIMETERS[INCHES]
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DRAWING NO.
2013/12/10
SCALE
1:1
of1 1
DIMENSIONAL DRAWING
ARM69AC-PLE60-_
OME-S-00000021 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
E
H.Yoneyama
H.Yoneyama H.Yoneyama
SHT
REV NO.
R04
DESIGNED BY
DWG SIZE
Protective EarthTerminal M4
60
13
27
60
5
5
16
52
2.525
Ratio L1 L2 Mass kg
5, 10 39 134.5 0.82
20, 40 52 147.5 0.92
Product Name
AR46ACD-◇-PLE40-5
AR46ACD-◇-PLE40-10
AR46ACD-◇-PLE40-20
AR46ACD-◇-PLE40-40
AR69ACD-◇-PLE60-5
AR69ACD-◇-PLE60-10
AR69ACD-◇-PLE60-20
AR69ACD-◇-PLE60-40
AR911ACD-◇-PLE80-5
AR911ACD-◇-PLE80-10
AR911ACD-◇-PLE80-20
AR911ACD-◇-PLE80-40
Product Name
AR46AC-◇-PLE40-5
AR46AC-◇-PLE40-10
AR46AC-◇-PLE40-20
AR46AC-◇-PLE40-40
AR69AC-◇-PLE60-5
AR69AC-◇-PLE60-10
AR69AC-◇-PLE60-20
AR69AC-◇-PLE60-40
AR911AC-◇-PLE80-5
AR911AC-◇-PLE80-10
AR911AC-◇-PLE80-20
AR911AC-◇-PLE80-40
Ratio L1 L2 Mass kg
5, 10 47 163 2.3
20, 40 59.5 175.5 2.5
AR46-PLE40
Built-In Controller Package Pulse Input Package
AR69-PLE60
Product Number Code
34.5
17.6
5557-10R-210(Molex)
Connector Cover
2013/12/10
本図面はオリエンタルモーター(株)の情報を含むもので当社の許可なく複製を禁止する。THIS DRAWING CONTAINS INFORMATION THAT IS PROPRIETARY TO ORIENTALMOTOR AND SHOULD NOT BE USED WITHOUT WRITTEN PERMISSION
6 75432 8 9 101
2 5 1071 6 8 943
A
B
C
D
E
F
C
D
A
B
E
R05
図名 普通公差
±0.3
F
6
120
1000
-
1 1of
H.Yoneyama
H.Yoneyama
30
30
400REV NO.
SHT
DWG SIZE
±0.8
±0.5400
120
OVER ±0.2
±0.10.5 UP TO 6
GENERAL TOLERANCE
図番 DRAWING NO.
品番 PART NO.
名称 TITLE
UNSPECIFIED EDGE指定なきエッジ
製図 DRAWN BY
検図 CHECKED BY
設計 DESIGNED BY
承認 APPROVED BY
単位 UNIT
OME-S-0000001
新規図面
尺度 SCALE
GENERAL TOLERANCES公差方式 TOLERANCING PRINCIPLE
H.Yoneyama材質 MATERIAL
JIS B 0024
1:1
JIS B 0419-mH
mm
A3
ARM46AC-PLE40-_
普通公差
Centre bore
M3x9DIN332 DR
3x3x18
Motor Cableφ8
Key DIN6885A
L1L2
0.021
28.5
26
0
12
-
23
0.015
0 2
10 h7
26 h7 -40
27.5
4xM4x6deep
40
40
400
Reduction ratio L1 L2 5、10 39 134.5 20、40 52 147.5
Protective EarthTerminal M4
27
42
13
42
5
3
11.2
34
18 2.5
AR69 AR911
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
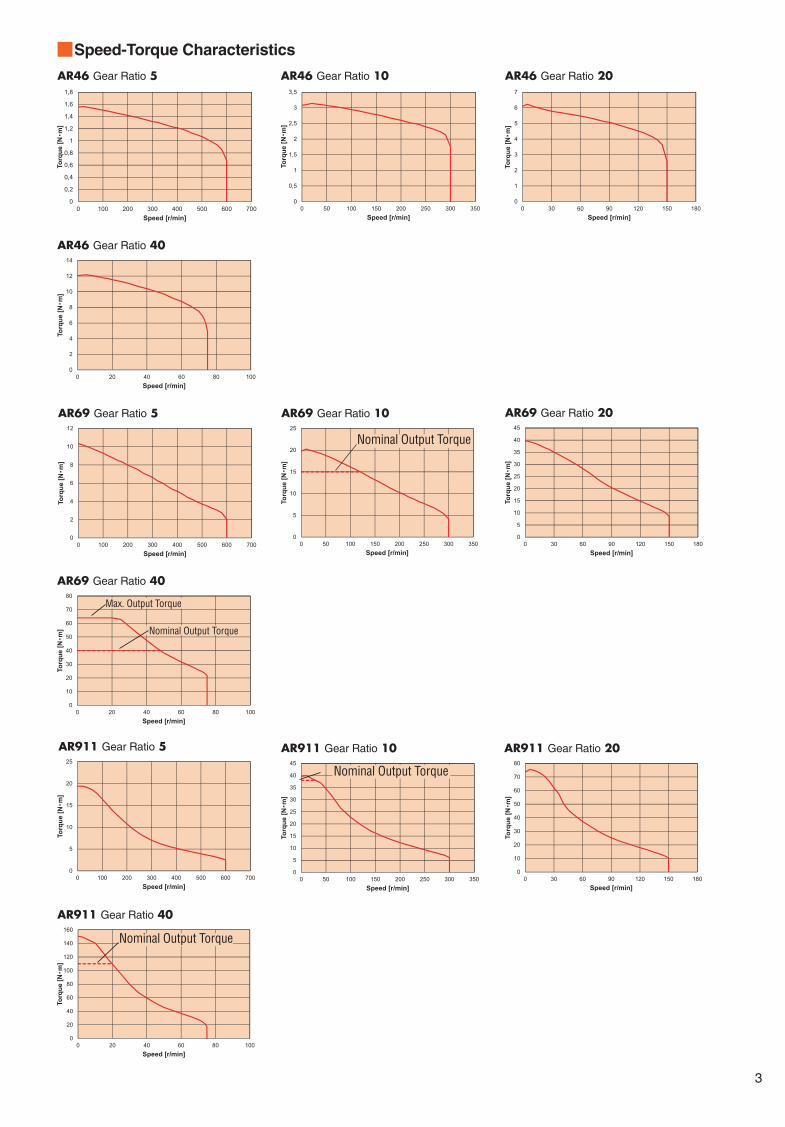
Speed-Torque Characteristics
AR46 Gear Ratio 5
0
0,5
1
1,5
2
2,5
3
3,5
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
1
2
3
4
5
6
7
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
2
4
6
8
10
12
14
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
AR46 Gear Ratio 10 AR46 Gear Ratio 20
AR46 Gear Ratio 40
AR69 Gear Ratio 5
0
5
10
15
20
25
30
35
40
45
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 10 AR69 Gear Ratio 20
0
5
10
15
20
25
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR911 Gear Ratio 5 AR911 Gear Ratio 10 AR911 Gear Ratio 20
AR911 Gear Ratio 40
0
5
10
15
20
25
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
0
2
4
6
8
10
12
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 40
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Max. Output Torque
0
5
10
15
20
25
30
35
40
45
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
10
20
30
40
50
60
70
80
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Nominal Output Torque
AR46
Type PLE40 (1) PLE60 (1) PLE80 (1)
Stage 1 2 1 2 1 2Reduction ratio 5 10 20 40 5 10 20 40 5 10 20 40Backlash [arc min] 15 19 10 12 7 9Nominal output torque [Nm] (2)(3) 14 5 20 18 40 15 44 40 110 38 120 110Max. output torque [Nm] (2)(3)(4) 22 8 32 29 64 24 70 64 176 61 192 176Emergency stop torque [Nm] (5) 36 27 40 36 80 80 88 80 220 200 240 220Max. input speed [r/min] (6) 18,000 13,000 7,000
Running noise [dB (A)] (7) 58 58 60
Permitted radial loadfor 30,000h (Fa=0) [N] (2)(8)
160 340 650
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
160 450 900
Permitted radial loadfor 20,000h (Fa=0) [N] (2)(8)
200 400 750
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
200 500 1,000
Operating temp [°C] (9) -25/90
Degree of protection IP54
Lifetime [h] 30,000
Connector Cover
5557-10R-210(Molex)
85
85
13
5274xM6x10deep
90
90
Reduction ratio L1 L2 5,10 60 213 20,40 77.5 230.5
Protective
Centre bore
M6x16
Earth Terminal M4
DIN332 DR
6x6x28
KeyDIN6885A
0.021
080
36
28.5
40
43.5 L1
3
L2
-
25
20 h7
60 h7 -0 0.030
Motor Cableφ8
H.Yoneyama
R04
DESIGNED BY
-
NEW DRAWING
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DIMENSIONS IN MILLIMETERS[INCHES]
DRAWING NO.
2013/12/10
SCALE
1:1 of1 1
DIMENSIONAL DRAWING
OME-S-00000031 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
ARM911AC-PLE80_
E
H.Yoneyama
H.Yoneyama
SHT
REV NO.
DWG SIZE
17.6
34.5
22.5
70
628 4
400
Ratio L1 L2 Mass kg
5, 10 60 213 5.1
20, 40 77.5 230.5 5.6
AR911-PLE80
3 42
AR 69 A C D -1- PLE 60 -10 Series Name AR :AR SeriesMotor Frame Size 46 42 mm 69 60 mm 911 85 mm Motor Type A: Standard (Single shaft) Power Supply Voltage C : Single-Phase 200-240 VAC
Blank: Pulse Input PackageDriver Type D : Built-In Controller Package
Cable length (Included) 1: 1 m 2 : 2 m 3: 3 m
a b c d e f g h i
a
b
c
d
e
f
g
h
i
Gear Series Name PLE: PLE Series
: : :
Gear Size 40 Ø40 mm 60 Ø60 mm 80 Ø80 mm: : :Gear Ratio 5, 10, 20, 40
Specifications of the PLE Gearhead
(1) These values refer only to the PLE Gearhead. The actual value depends on the motor combination. (2) These values refer to a speed of the output shaft of n2=100 r/min on duty cycle KA=1 and S1-mode for electrical machines and T=30°C(3) With key, at tumescent load (4) Allowable for 30,000 revolutions at the output shaft.(5) Allowed 1,000 times(6) Allowed operating temperature must be kept; other input speeds on inquiry(7) Sound pressure level; distance 1 m; measured on idle running with an input speed of n1=3000 r/min, ratio=5(8) Half way along the output shaft(9) Refering to the middle of the body surface
A number indicating the desired length of 1 (1 m), 2 (2 m) or 3 (3 m) for thecable included with the product is entered where the box ◇ is located withinthe product name. Select a desired cable length from 1 m, 2 m and 3 m.
Dimensions
Product Line
M5x12.5DIN332 DRCentre bore
Motor Cableφ8
5x5x25Key DIN6885A
26
14 h7
L2 35
28.5 60 17
-
30
0.018
0 3
40 h7 -0 0.025
L1
4xM5x8deep
Reduction ratio L1 L2 5,10 47 163 20,40 59.5 175.5
Connector Cover
5557-10R-210(Molex)
400
17.6
34.5
NEW DRAWING
-
DIMENSIONS IN MILLIMETERS[INCHES]
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DRAWING NO.
2013/12/10
SCALE
1:1
of1 1
DIMENSIONAL DRAWING
ARM69AC-PLE60-_
OME-S-00000021 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
E
H.Yoneyama
H.Yoneyama H.Yoneyama
SHT
REV NO.
R04
DESIGNED BY
DWG SIZE
Protective EarthTerminal M4
60
13
27
60
5
5
16
52
2.525
Ratio L1 L2 Mass kg
5, 10 39 134.5 0.82
20, 40 52 147.5 0.92
Product Name
AR46ACD-◇-PLE40-5
AR46ACD-◇-PLE40-10
AR46ACD-◇-PLE40-20
AR46ACD-◇-PLE40-40
AR69ACD-◇-PLE60-5
AR69ACD-◇-PLE60-10
AR69ACD-◇-PLE60-20
AR69ACD-◇-PLE60-40
AR911ACD-◇-PLE80-5
AR911ACD-◇-PLE80-10
AR911ACD-◇-PLE80-20
AR911ACD-◇-PLE80-40
Product Name
AR46AC-◇-PLE40-5
AR46AC-◇-PLE40-10
AR46AC-◇-PLE40-20
AR46AC-◇-PLE40-40
AR69AC-◇-PLE60-5
AR69AC-◇-PLE60-10
AR69AC-◇-PLE60-20
AR69AC-◇-PLE60-40
AR911AC-◇-PLE80-5
AR911AC-◇-PLE80-10
AR911AC-◇-PLE80-20
AR911AC-◇-PLE80-40
Ratio L1 L2 Mass kg
5, 10 47 163 2.3
20, 40 59.5 175.5 2.5
AR46-PLE40
Built-In Controller Package Pulse Input Package
AR69-PLE60
Product Number Code
34.5
17.6
5557-10R-210(Molex)
Connector Cover
2013/12/10
本図面はオリエンタルモーター(株)の情報を含むもので当社の許可なく複製を禁止する。THIS DRAWING CONTAINS INFORMATION THAT IS PROPRIETARY TO ORIENTALMOTOR AND SHOULD NOT BE USED WITHOUT WRITTEN PERMISSION
6 75432 8 9 101
2 5 1071 6 8 943
A
B
C
D
E
F
C
D
A
B
E
R05
図名 普通公差
±0.3
F
6
120
1000
-
1 1of
H.Yoneyama
H.Yoneyama
30
30
400REV NO.
SHT
DWG SIZE
±0.8
±0.5400
120
OVER ±0.2
±0.10.5 UP TO 6
GENERAL TOLERANCE
図番 DRAWING NO.
品番 PART NO.
名称 TITLE
UNSPECIFIED EDGE指定なきエッジ
製図 DRAWN BY
検図 CHECKED BY
設計 DESIGNED BY
承認 APPROVED BY
単位 UNIT
OME-S-0000001
新規図面
尺度 SCALE
GENERAL TOLERANCES公差方式 TOLERANCING PRINCIPLE
H.Yoneyama材質 MATERIAL
JIS B 0024
1:1
JIS B 0419-mH
mm
A3
ARM46AC-PLE40-_
普通公差
Centre bore
M3x9DIN332 DR
3x3x18
Motor Cableφ8
Key DIN6885A
L1L2
0.021
28.5
26
0
12
-
23
0.015
0 2
10 h7
26 h7 -40
27.5
4xM4x6deep
40
40
400
Reduction ratio L1 L2 5、10 39 134.5 20、40 52 147.5
Protective EarthTerminal M4
27
42
13
42
5
3
11.2
34
18 2.5
AR69 AR911
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
Speed-Torque Characteristics
AR46 Gear Ratio 5
0
0,5
1
1,5
2
2,5
3
3,5
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
1
2
3
4
5
6
7
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
2
4
6
8
10
12
14
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
AR46 Gear Ratio 10 AR46 Gear Ratio 20
AR46 Gear Ratio 40
AR69 Gear Ratio 5
0
5
10
15
20
25
30
35
40
45
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 10 AR69 Gear Ratio 20
0
5
10
15
20
25
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR911 Gear Ratio 5 AR911 Gear Ratio 10 AR911 Gear Ratio 20
AR911 Gear Ratio 40
0
5
10
15
20
25
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
0
2
4
6
8
10
12
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 40
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Max. Output Torque
0
5
10
15
20
25
30
35
40
45
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
10
20
30
40
50
60
70
80
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Nominal Output Torque
AR46
Type PLE40 (1) PLE60 (1) PLE80 (1)
Stage 1 2 1 2 1 2Reduction ratio 5 10 20 40 5 10 20 40 5 10 20 40Backlash [arc min] 15 19 10 12 7 9Nominal output torque [Nm] (2)(3) 14 5 20 18 40 15 44 40 110 38 120 110Max. output torque [Nm] (2)(3)(4) 22 8 32 29 64 24 70 64 176 61 192 176Emergency stop torque [Nm] (5) 36 27 40 36 80 80 88 80 220 200 240 220Max. input speed [r/min] (6) 18,000 13,000 7,000
Running noise [dB (A)] (7) 58 58 60
Permitted radial loadfor 30,000h (Fa=0) [N] (2)(8)
160 340 650
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
160 450 900
Permitted radial loadfor 20,000h (Fa=0) [N] (2)(8)
200 400 750
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
200 500 1,000
Operating temp [°C] (9) -25/90
Degree of protection IP54
Lifetime [h] 30,000
Connector Cover
5557-10R-210(Molex)
85
85
13
5274xM6x10deep
90
90
Reduction ratio L1 L2 5,10 60 213 20,40 77.5 230.5
Protective
Centre bore
M6x16
Earth Terminal M4
DIN332 DR
6x6x28
KeyDIN6885A
0.021
080
36
28.5
40
43.5 L1
3
L2
-
25
20 h7
60 h7 -0 0.030
Motor Cableφ8
H.Yoneyama
R04
DESIGNED BY
-
NEW DRAWING
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DIMENSIONS IN MILLIMETERS[INCHES]
DRAWING NO.
2013/12/10
SCALE
1:1 of1 1
DIMENSIONAL DRAWING
OME-S-00000031 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
ARM911AC-PLE80_
E
H.Yoneyama
H.Yoneyama
SHT
REV NO.
DWG SIZE
17.6
34.5
22.5
70
628 4
400
Ratio L1 L2 Mass kg
5, 10 60 213 5.1
20, 40 77.5 230.5 5.6
AR911-PLE80
3 42
AR 69 A C D -1- PLE 60 -10 Series Name AR :AR SeriesMotor Frame Size 46 42 mm 69 60 mm 911 85 mm Motor Type A: Standard (Single shaft) Power Supply Voltage C : Single-Phase 200-240 VAC
Blank: Pulse Input PackageDriver Type D : Built-In Controller Package
Cable length (Included) 1: 1 m 2 : 2 m 3: 3 m
a b c d e f g h i
a
b
c
d
e
f
g
h
i
Gear Series Name PLE: PLE Series
: : :
Gear Size 40 Ø40 mm 60 Ø60 mm 80 Ø80 mm: : :Gear Ratio 5, 10, 20, 40
Specifications of the PLE Gearhead
(1) These values refer only to the PLE Gearhead. The actual value depends on the motor combination. (2) These values refer to a speed of the output shaft of n2=100 r/min on duty cycle KA=1 and S1-mode for electrical machines and T=30°C(3) With key, at tumescent load (4) Allowable for 30,000 revolutions at the output shaft.(5) Allowed 1,000 times(6) Allowed operating temperature must be kept; other input speeds on inquiry(7) Sound pressure level; distance 1 m; measured on idle running with an input speed of n1=3000 r/min, ratio=5(8) Half way along the output shaft(9) Refering to the middle of the body surface
A number indicating the desired length of 1 (1 m), 2 (2 m) or 3 (3 m) for thecable included with the product is entered where the box ◇ is located withinthe product name. Select a desired cable length from 1 m, 2 m and 3 m.
Dimensions
Product Line
M5x12.5DIN332 DRCentre bore
Motor Cableφ8
5x5x25Key DIN6885A
26
14 h7
L2 35
28.5 60 17
-
30
0.018
0 3
40 h7 -0 0.025
L1
4xM5x8deep
Reduction ratio L1 L2 5,10 47 163 20,40 59.5 175.5
Connector Cover
5557-10R-210(Molex)400
17.6
34.5
NEW DRAWING
-
DIMENSIONS IN MILLIMETERS[INCHES]
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DRAWING NO.
2013/12/10
SCALE
1:1
of1 1
DIMENSIONAL DRAWING
ARM69AC-PLE60-_
OME-S-00000021 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
E
H.Yoneyama
H.Yoneyama H.Yoneyama
SHT
REV NO.
R04
DESIGNED BY
DWG SIZE
Protective EarthTerminal M4
60
13
27
60
5
5
16
52
2.525
Ratio L1 L2 Mass kg
5, 10 39 134.5 0.82
20, 40 52 147.5 0.92
Product Name
AR46ACD-◇-PLE40-5
AR46ACD-◇-PLE40-10
AR46ACD-◇-PLE40-20
AR46ACD-◇-PLE40-40
AR69ACD-◇-PLE60-5
AR69ACD-◇-PLE60-10
AR69ACD-◇-PLE60-20
AR69ACD-◇-PLE60-40
AR911ACD-◇-PLE80-5
AR911ACD-◇-PLE80-10
AR911ACD-◇-PLE80-20
AR911ACD-◇-PLE80-40
Product Name
AR46AC-◇-PLE40-5
AR46AC-◇-PLE40-10
AR46AC-◇-PLE40-20
AR46AC-◇-PLE40-40
AR69AC-◇-PLE60-5
AR69AC-◇-PLE60-10
AR69AC-◇-PLE60-20
AR69AC-◇-PLE60-40
AR911AC-◇-PLE80-5
AR911AC-◇-PLE80-10
AR911AC-◇-PLE80-20
AR911AC-◇-PLE80-40
Ratio L1 L2 Mass kg
5, 10 47 163 2.3
20, 40 59.5 175.5 2.5
AR46-PLE40
Built-In Controller Package Pulse Input Package
AR69-PLE60
Product Number Code
34.5
17.6
5557-10R-210(Molex)
Connector Cover
2013/12/10
本図面はオリエンタルモーター(株)の情報を含むもので当社の許可なく複製を禁止する。THIS DRAWING CONTAINS INFORMATION THAT IS PROPRIETARY TO ORIENTALMOTOR AND SHOULD NOT BE USED WITHOUT WRITTEN PERMISSION
6 75432 8 9 101
2 5 1071 6 8 943
A
B
C
D
E
F
C
D
A
B
E
R05
図名 普通公差
±0.3
F
6
120
1000
-
1 1of
H.Yoneyama
H.Yoneyama
30
30
400REV NO.
SHT
DWG SIZE
±0.8
±0.5400
120
OVER ±0.2
±0.10.5 UP TO 6
GENERAL TOLERANCE
図番 DRAWING NO.
品番 PART NO.
名称 TITLE
UNSPECIFIED EDGE指定なきエッジ
製図 DRAWN BY
検図 CHECKED BY
設計 DESIGNED BY
承認 APPROVED BY
単位 UNIT
OME-S-0000001
新規図面
尺度 SCALE
GENERAL TOLERANCES公差方式 TOLERANCING PRINCIPLE
H.Yoneyama材質 MATERIAL
JIS B 0024
1:1
JIS B 0419-mH
mm
A3
ARM46AC-PLE40-_
普通公差
Centre bore
M3x9DIN332 DR
3x3x18
Motor Cableφ8
Key DIN6885A
L1L2
0.021
28.5
26
0
12
-
23
0.015
0 2
10 h7
26 h7 -40
27.5
4xM4x6deep
40
40
400
Reduction ratio L1 L2 5、10 39 134.5 20、40 52 147.5
Protective EarthTerminal M4
27
42
13
42
5
3
11.2
34
18 2.5
AR69 AR911
0
0,2
0,4
0,6
0,8
1
1,2
1,4
1,6
1,8
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
Speed-Torque Characteristics
AR46 Gear Ratio 5
0
0,5
1
1,5
2
2,5
3
3,5
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
1
2
3
4
5
6
7
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
2
4
6
8
10
12
14
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
AR46 Gear Ratio 10 AR46 Gear Ratio 20
AR46 Gear Ratio 40
AR69 Gear Ratio 5
0
5
10
15
20
25
30
35
40
45
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 10 AR69 Gear Ratio 20
0
5
10
15
20
25
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR911 Gear Ratio 5 AR911 Gear Ratio 10 AR911 Gear Ratio 20
AR911 Gear Ratio 40
0
5
10
15
20
25
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
0
2
4
6
8
10
12
0 100 200 300 400 500 600 700
Torq
ue [N
・m
]
Speed [r/min]
AR69 Gear Ratio 40
0
10
20
30
40
50
60
70
80
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Max. Output Torque
0
5
10
15
20
25
30
35
40
45
0 50 100 150 200 250 300 350
Torq
ue [N
・m
]
Speed [r/min]
0
10
20
30
40
50
60
70
80
0 30 60 90 120 150 180
Torq
ue [N
・m
]
Speed [r/min]
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100
Torq
ue [N
・m
]
Speed [r/min]
Nominal Output Torque
Nominal Output Torque
AR46
Type PLE40 (1) PLE60 (1) PLE80 (1)
Stage 1 2 1 2 1 2Reduction ratio 5 10 20 40 5 10 20 40 5 10 20 40Backlash [arc min] 15 19 10 12 7 9Nominal output torque [Nm] (2)(3) 14 5 20 18 40 15 44 40 110 38 120 110Max. output torque [Nm] (2)(3)(4) 22 8 32 29 64 24 70 64 176 61 192 176Emergency stop torque [Nm] (5) 36 27 40 36 80 80 88 80 220 200 240 220Max. input speed [r/min] (6) 18,000 13,000 7,000
Running noise [dB (A)] (7) 58 58 60
Permitted radial loadfor 30,000h (Fa=0) [N] (2)(8)
160 340 650
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
160 450 900
Permitted radial loadfor 20,000h (Fa=0) [N] (2)(8)
200 400 750
Permitted axial loadfor 30,000h (Fr=0) [N] (2)(8)
200 500 1,000
Operating temp [°C] (9) -25/90
Degree of protection IP54
Lifetime [h] 30,000
Connector Cover
5557-10R-210(Molex)
85
85
13
5274xM6x10deep
90
90
Reduction ratio L1 L2 5,10 60 213 20,40 77.5 230.5
Protective
Centre bore
M6x16
Earth Terminal M4
DIN332 DR
6x6x28
KeyDIN6885A
0.021
080
36
28.5
40
43.5 L1
3
L2
-
25
20 h7
60 h7 -0 0.030
Motor Cableφ8
H.Yoneyama
R04
DESIGNED BY
-
NEW DRAWING
A2
APPROVED BY CHECKED BY
DRAWN BY
TITLE
MODEL
DIMENSIONS IN MILLIMETERS[INCHES]
DRAWING NO.
2013/12/10
SCALE
1:1 of1 1
DIMENSIONAL DRAWING
OME-S-00000031 2 3 4 5 6 7 8 109
1 4 1096 7 832 5
A
B
C
D
E
F
B
F
C
D
A
ARM911AC-PLE80_
E
H.Yoneyama
H.Yoneyama
SHT
REV NO.
DWG SIZE
17.6
34.5
22.5
70
628 4
400
Ratio L1 L2 Mass kg
5, 10 60 213 5.1
20, 40 77.5 230.5 5.6
AR911-PLE80

NEWPRODUCTS
Stepper Motor and Driver Package
AR Series
High output torque
Motor and gearhead are delivered pre-assembled.
High-Efficiency Closed Loop Combination with Neugart PLE Planetary Gearhead
Lower Heat GenerationTemperature Distribution by Thermography
Comparison under the same conditions
No TuningYou can perform positioning quickly after a load change, etc., without adjusting any gains.
No HuntingBecause it uses a stepper motor, the AR Series does not hunt when stopped.
Rotor Position Detection SensorThe reliability is as high as a servo motor.
Sensor detects rotor position
What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX?FLEX is a collective name for products that support Industrial Network control via I/O control, Modbus (RTU) control, and network converters.These products enable simple connection and simple control, shortening the total lead time for system configuration.
0 20 40 60 80 100
80
70
60
50
40
30
20
10
0
Maximum Torque
Permissible Torque
Max. Output Torque
Nominal Output Torque
PLEConventional
Torq
ue [
N·m
]
Speed [r/min]
Speed-Torque-Characteristic - AR69 with Gear Ratio 40
Inpu
t Sig
nal
InputCounter
DeviationCounter
Rotor Position Counter Ex
cita
tion
Sequ
ence
Con
trol
Outp
ut E
lem
ent
Motor
Sensor
Normal (Positioning deviation is less than ± 1.8°)
Motor runs in open loop mode like a stepper motor.
During Overload Condition (Positioning deviation is ± 1.8° or more)The closed loop mode is engaged to maintain the positioning operation.
Closed Loop Control
Driver Type: - Built-In Controller Type - Pulse Input Type
Specifications are subject to change without notice.This catalogue was published in April 2014.
This product is manufactured at a plant certified with the international standards ISO 9001 (for quality assurance) and ISO 14001 (for systems of environmental management).
ORIENTAL MOTOR (EUROPA) GmbH www.orientalmotor.de
European Headquarters and Düsseldorf OfficeSchiessstraße 7440549 Düsseldorf, GermanyTel: 0211-5206700 Fax: 0211-52067099
For other countries – EU-Webshop: www.orientalmotor.eu www.orientalmotor.eu
ORIENTAL MOTOR (UK) LTD.www.oriental-motor.co.uk
UK HeadquartersUnit 5, Faraday Office Park,Rankine Road, Basingstoke,Hampshire RG24 8AH U.K.Tel: 01256-347090 Fax: 01256-347099
ORIENTAL MOTOR (FRANCE) SARLwww.orientalmotor.fr
France Headquarters56, Rue des Hautes Pâtures9200 Nanterre Cedex, FranceTel: 01 47 86 97 50 Fax: 01 47 82 45 16
ORIENTAL MOTOR ITALIA s.r.l.www.orientalmotor.it
Italy HeadquartersVia A. De Gasperi, 8520017 Mazzo di Rho (Ml), ItalyTel: 02-93906346 Fax: 02-93906348
ORIENTAL MOTOR CO., LTD.www.orientalmotor.co.jp
Headquarters4-8-1 HigashiuenoTaito-ku, Tokyo 110-8536, JapanTel: (03)6744-0361 Fax: (03)5826-2576
Printed in Europe UK/042014/VERS02©Copyright Oriental Motor (Europa) GmbH 2014
Network Converter
The network converter is a transducer that converts from thehost communication protocol to Oriental Motor‘s unique RS-485communication protocol. You can use the network converter tocontrol products supporting Oriental Motor‘s RS-485 in the hostcommunication environment.
Network Type Product Name
EtherCAT-Compatible NETC01-ECT
CC-Link-Compatible NETC01-CC
MECHATROLINK- II Compatible NETC01-M2
MECHATROLINK- III Compatible NETC01-M3
Product Line
MECHATROLINK- II CompatibleMECHATROLINK- II Compatible
MECHATROLINK- III CompatibleMECHATROLINK- III Compatible NETC01-ECT NETC01-M3NETC01-M2NETC01-CCPower Module
CPU Module
I/O Module
Power Module
CPU Module
Serial Communication
Module
Power Module
CPU Module
Industrial Network Module
Power Module
CPU Module
Pulse Generator
ModuleComputer
Serial Communication Board (RS-485)
Touch Screen (HMI)
c Industrial Network
a I/O b Modbus (RTU) b Modbus (RTU) Pulse Input
EtherCAT
CC-LinkMECHATROLINK-MECHATROLINK-
When controlled with I/O When controlled with serial communication
When controlled with a computer or touch screen (HMI)
When controlled with an Industrial Network
b RS-485
or
Network Converter
Handles a Variety of System Configurations
Built-in Controller (Stored Data) Type Pulse Input
Operating data is set in the driver and the operating data is selected and executed from the master controller. Connection and control with the master controller is done through either a I/O, bModbus (RTU)/RS-485, or c Industrial Network.
Operations are executed by inputting the pulses into the driver. The motor can be controlled using a positioning module (pulse generator) provided by the customer.
a I/O b Modbus (RTU)/RS-485 c Industrial Network
The functions of a positioning module (pulse generator) are built into the driver, allowing it to be connected directly to a controller or PLC to configure an operating system with I/O. Since no positioning module is required on the PLC side, space is saved and the system is simplified.
Operating data and parameters can be set and operation commands can be input using RS-485 communication. Up to 31 drivers can be connected to each serial communication module. Also, there is a function that enables the simultaneous start of multiple axes. The protocol supports Modbus (RTU), enabling connection with devices such as a touch screen (HMI) or PCs.
Use of a network converter (sold
separately) enables support
with EtherCAT, CC-Link or
MECHATROLINK communication.
Operating data and parameters
can be set and operation
commands can be input using
various communication methods.
5

NEWPRODUCTS
Stepper Motor and Driver Package
AR Series
High output torque
Motor and gearhead are delivered pre-assembled.
High-Efficiency Closed Loop Combination with Neugart PLE Planetary Gearhead
Lower Heat GenerationTemperature Distribution by Thermography
Comparison under the same conditions
No TuningYou can perform positioning quickly after a load change, etc., without adjusting any gains.
No HuntingBecause it uses a stepper motor, the AR Series does not hunt when stopped.
Rotor Position Detection SensorThe reliability is as high as a servo motor.
Sensor detects rotor position
What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX? What is FLEX?FLEX is a collective name for products that support Industrial Network control via I/O control, Modbus (RTU) control, and network converters.These products enable simple connection and simple control, shortening the total lead time for system configuration.
0 20 40 60 80 100
80
70
60
50
40
30
20
10
0
Maximum Torque
Permissible Torque
Max. Output Torque
Nominal Output Torque
PLEConventional
Torq
ue [
N·m
]
Speed [r/min]
Speed-Torque-Characteristic - AR69 with Gear Ratio 40
Inpu
t Sig
nal
InputCounter
DeviationCounter
Rotor Position Counter Ex
cita
tion
Sequ
ence
Con
trol
Outp
ut E
lem
ent
Motor
Sensor
Normal (Positioning deviation is less than ± 1.8°)
Motor runs in open loop mode like a stepper motor.
During Overload Condition (Positioning deviation is ± 1.8° or more)The closed loop mode is engaged to maintain the positioning operation.
Closed Loop Control
Driver Type: - Built-In Controller Type - Pulse Input Type
Specifications are subject to change without notice.This catalogue was published in April 2014.
This product is manufactured at a plant certified with the international standards ISO 9001 (for quality assurance) and ISO 14001 (for systems of environmental management).
ORIENTAL MOTOR (EUROPA) GmbH www.orientalmotor.de
European Headquarters and Düsseldorf OfficeSchiessstraße 7440549 Düsseldorf, GermanyTel: 0211-5206700 Fax: 0211-52067099
For other countries – EU-Webshop: www.orientalmotor.eu www.orientalmotor.eu
ORIENTAL MOTOR (UK) LTD.www.oriental-motor.co.uk
UK HeadquartersUnit 5, Faraday Office Park,Rankine Road, Basingstoke,Hampshire RG24 8AH U.K.Tel: 01256-347090 Fax: 01256-347099
ORIENTAL MOTOR (FRANCE) SARLwww.orientalmotor.fr
France Headquarters56, Rue des Hautes Pâtures9200 Nanterre Cedex, FranceTel: 01 47 86 97 50 Fax: 01 47 82 45 16
ORIENTAL MOTOR ITALIA s.r.l.www.orientalmotor.it
Italy HeadquartersVia A. De Gasperi, 8520017 Mazzo di Rho (Ml), ItalyTel: 02-93906346 Fax: 02-93906348
ORIENTAL MOTOR CO., LTD.www.orientalmotor.co.jp
Headquarters4-8-1 HigashiuenoTaito-ku, Tokyo 110-8536, JapanTel: (03)6744-0361 Fax: (03)5826-2576
Printed in Europe UK/042014/VERS02©Copyright Oriental Motor (Europa) GmbH 2014
Network Converter
The network converter is a transducer that converts from thehost communication protocol to Oriental Motor‘s unique RS-485communication protocol. You can use the network converter tocontrol products supporting Oriental Motor‘s RS-485 in the hostcommunication environment.
Network Type Product Name
EtherCAT-Compatible NETC01-ECT
CC-Link-Compatible NETC01-CC
MECHATROLINK- II Compatible NETC01-M2
MECHATROLINK- III Compatible NETC01-M3
Product Line
MECHATROLINK- II CompatibleMECHATROLINK- II Compatible
MECHATROLINK- III CompatibleMECHATROLINK- III Compatible NETC01-ECT NETC01-M3NETC01-M2NETC01-CCPower Module
CPU Module
I/O Module
Power Module
CPU Module
Serial Communication
Module
Power Module
CPU Module
Industrial Network Module
Power Module
CPU Module
Pulse Generator
ModuleComputer
Serial Communication Board (RS-485)
Touch Screen (HMI)
c Industrial Network
a I/O b Modbus (RTU) b Modbus (RTU) Pulse Input
EtherCAT
CC-LinkMECHATROLINK-MECHATROLINK-
When controlled with I/O When controlled with serial communication
When controlled with a computer or touch screen (HMI)
When controlled with an Industrial Network
b RS-485
or
Network Converter
Handles a Variety of System Configurations
Built-in Controller (Stored Data) Type Pulse Input
Operating data is set in the driver and the operating data is selected and executed from the master controller. Connection and control with the master controller is done through either a I/O, bModbus (RTU)/RS-485, or c Industrial Network.
Operations are executed by inputting the pulses into the driver. The motor can be controlled using a positioning module (pulse generator) provided by the customer.
a I/O b Modbus (RTU)/RS-485 c Industrial Network
The functions of a positioning module (pulse generator) are built into the driver, allowing it to be connected directly to a controller or PLC to configure an operating system with I/O. Since no positioning module is required on the PLC side, space is saved and the system is simplified.
Operating data and parameters can be set and operation commands can be input using RS-485 communication. Up to 31 drivers can be connected to each serial communication module. Also, there is a function that enables the simultaneous start of multiple axes. The protocol supports Modbus (RTU), enabling connection with devices such as a touch screen (HMI) or PCs.
Use of a network converter (sold
separately) enables support
with EtherCAT, CC-Link or
MECHATROLINK communication.
Operating data and parameters
can be set and operation
commands can be input using
various communication methods.
5


















