Echo Planar Spectroscopic Imaging with Peak- Enhanced 2D-Capon

A 2D-Planar Dielectrophoretic Model
H. Simha and R. N. Banavar
Abstract— Dielectrophoresis (DEP) is an electrokinetics-based phenomenon that involves the motion of a particle dueto the interaction between an applied nonuniform electric fieldand an induced dipole moment. This technique is very effectivein particle manipulation and separation. Earlier studies oncontrol-amenable models to describe the motion of a neutrallybuoyant, neutrally charged particle in a chamber with a parallelelectrode array have restricted the motion of the particle to one-dimension. Here, incorporating the electro-thermal fluid motionas well, we present a 2D-planar DEP model.
I. INTRODUCTION
Particle electrokinetics based techniques which deal withforces exerted on micro/nano particles through the actionof an applied electric field are widely employed in thefield of biotechnology and nanotechnology. Dielectrophoresisis one such electrokinetics-based technique. An electricallyneutral particle placed in a non-uniform electric field getspolarized and experiences a translational force that can causethe motion of the particle. This resultant motion is termedas dielectrophoresis (DEP) by Pohl [8]. The direction ofthe motion depends on the particle polarizability comparedwith the suspending medium, which in turn depend onthe frequency of the applied field. If the force is in thedirection of the lower field strength, then it is called negative-DEP (n-DEP); the converse is called positive-DEP (p-DEP).Dielectrophoresis can be used for manipulation, separation,rotation and levitation of a wide variety of micro/nanoparticles, including biological cells and polymers (see [4],[6] and the references there in).
In this paper, we explore the various aspects of DEPmodeling. Based on the work in [1] and [2], we derive ageneral (yet approximate) DEP model in Section II. We usethis model in Section III to derive an analytical 2D-planarDEP model that accounts for the impact of the electro-thermal fluid motion induced by the applied electric field.Further, we do the stability analysis of the system in thesame section. In Section IV, we simulate the trajectory of theparticle under the influence of the DEP force using COMSOLMultiphysics R© - a finite element simulation software, tovalidate our findings.
II. DEP MODEL
Consider a neutrally charged, spherical, homogeneousdielectric particle with loss, in a lossy medium as shownin Figure 1. To generate a non-uniform electric field, weconsider a parallel electrode array which is widely used in
H. Simha is with Systems and Control Engineering, IIT [email protected]
R. N. Banavar is with Faculty of Systems and Control Engineering, IITBombay [email protected]
Fig. 1. A simple configuration of DEP systems with a spherical particle ina chamber with a parallel electrode array at the bottom. The exact boundarycondition for the potential at x2 = 0 is considered such that the normalderivative of the potential is zero at the inter-electrode gap.
applications. The dielectrophoretic force FDEP due to theinteraction between the applied electric field and the induceddipole moment is given by [6]
FDEP(x1, x2, t) = m(x1, x2, t) · ∇E(x1, x2, t), (1)
where m(x1, x2, t) is the dipole moment induced in theneutral particle due to the applied electric field E(x1, x2, t)which is a function of the spatial variables (x1, x2) andtime t. For a spherical particle with the permittivity εp,conductivity σp and radius r, in a medium with permittivityεm and conductivity σm, the induced moment on a particleunder the influence of an electric field of frequency ω isgiven by
m(x1, x2, jω) = 4πr3εmK(jω)E(x1, x2, jω), (2)
where K(jω) is called the Clausius-Mossotti function [6]given by
K(jω) =ε∗p(jω)− ε∗m(jω)ε∗p(jω) + 2ε∗m(jω)
, (3)
where ε∗p(jω) =(εp + σp
jω
)is the complex permittivity
of the particle and ε∗m(jω) =(εm + σm
jω
)is the complex
permittivity of the medium. The linear relation between theapplied electric field and the induced dipole moment inequation (2) can be modified as
m(x1, x2, jω) = G(jω)E(x1, x2, jω), (4)
where G(jω) is given by
G(jω) = 4πεmr3ε∗p(jω)− ε∗m(jω)ε∗p(jω) + 2ε∗m(jω)
. (5)
The term G(jω) can be viewed as a transfer function ofthe system and the analysis can be done accordingly. In the

time-domain, equation (4) becomes
m(x1, x2, t) = g(t) ∗E(x1, x2, t), (6)
where ∗ denotes time convolution and g(t) is the impulseresponse of the system. Substituting expressions for ε∗p(jω)and ε∗m(jω) in (5) and with s , jω, the system transferfunction G(s) can be written as
G(s) = a+b
s+ c, (7)
where
a = 4πεmr3 εp − εmεp + 2εm
, (8)
b = a
(σp − σmεp − εm
− σp + 2σmεp + 2εm
), (9)
c =σp + 2σmεp + 2εm
. (10)
Taking the inverse Laplace transform of G(s) in equation(7), the impulse response g(t) of the system becomes
g(t) = aδ(t) + be−ct.
Substituting for g(t) in equation (6), the expression for thedipole moment becomes
m(x1, x2, t) = (aδ(t) + be−ct) ∗E(x1, x2, t).
Let the applied nonuniform electric field be E(x1, x2, t) =u(t)E(x1, x2), where u(t) is the control. Then the dipolemoment is given by
m(x1, x2, t) = {a(δ(t) ∗ u(t)) + b(e−ct ∗ u(t))}E(x1, x2),
or
m(x1, x2, t) = {au(t) + by(t)}E(x1, x2), (11)
where y(t) = e−ct ∗ u(t), and hence satisfies the differentialequation
y(t) + cy(t) = u(t).
Using equation (11) for the dipole moment in the equation(1), we derive the expression for the DEP force FDEP as
FDEP(x1, x2, t) =
{au2(t) + by(t)u(t)}(E(x1, x2) · ∇)E(x1, x2).
If E(x1, x2) = [E1(x1, x2), E2(x1, x2)], where E1 and E2
are the components of the applied electric field in the x1 andx2 directions respectively, then (E(x1, x2) · ∇)E(x1, x2) =[H1(x1, x2), H2(x1, x2)], where H1 and H2 are given by
H1(x1, x2) = E · (∇E1) = E1∂E1
∂x1+ E2
∂E1
∂x2,
H2(x1, x2) = E · (∇E2) = E1∂E2
∂x1+ E2
∂E2
∂x2.
Then the expression for FDEP = [FDEP,x1 , FDEP,x2 ] be-comes
FDEP(x1, x2, t) =
[FDEP,x1(x1, x2, t)FDEP,x2(x1, x2, t)
]
= (au2(t) + by(t)u(t))
[H1(x1, x2)H2(x1, x2)
].
(12)
Equation (12) gives an expression for dielectrophoretic forceFDEP for a configuration shown in Figure 1. Apart fromthe DEP force, forces that act on the particle are viscousdrag, gravitational and buoyant force. For a neutrally buoyantparticle the contribution of the gravitational and buoyantforce is zero. Further, we assume that the particle and themedium are such that the Reynolds number is low. Underthis assumption, according to Stoke’s law [4], the viscousdrag force is linear in velocity. Since the particle is smalland light, it is assumed that the inertial force is relativelysmall compared to the other forces. Hence the equation ofmotion becomes
kx1 + (au2 + byu)H1(x1, x2) = 0, (13)
kx2 + (au2 + byu)H2(x1, x2) = 0, (14)
and
y + cy = u. (15)
where k is the viscous constant which depends on theproperties of the fluid and the dimensions of the particle.For the exact boundary conditions as shown in Figure 1, theexpressions for H1(x1, x1) and H2(x1, x1) are derived in[1]. Let d1 be the width of each electrode and d2 be theinter-electrode gap. With d = (d1 + d2)/2 and q = d2/(2d),the expressions for H1(x1, x1) and H2(x1, x1) are given bythe equations (16) and (17) respectively, placed at the top ofthe next page. K is the complete elliptic function of the firstkind. Let us introduce scaled co-ordinates x1 = x1/d andx2 = x2/d. Further, if we assume d1 = d2, the expressionssimplify to
H1(x1, x2) =π3V 2
0 sin (2πx1)
2√
2d3K(
1√2
)2
(cos (2πx1) + cosh (2πx2))3/2,
H2(x1, x2) =
− π3V 20 sinh (2πx2)
2√
2d3K(
1√2
)2
(cos (2πx1) + cosh (2πx2))3/2.
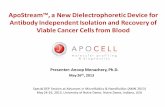
A plot of (H1(x1, x2), H2(x1, x2)) is shown in Figure 2.Note that far from the electrodes, H1 component is negligi-ble.An additional assumption: Far away from the electrodes,say x2 >> d or x2 >> 1, the hyperbolic terms dominatecompared to the sine and cosine terms which are bounded(cos (2πx1) << cosh (2πx2) and e4πx2 >> 1).

H1(x1, x2) =π3V 2
0
(sin(
2πx1d
)− 2 cos(πq) sin
(πx1d
)cosh
(πx2d
))8d3K
(cos(πq2
))2 ((cos(πq)− cos(πx2d
)cosh
(πx2d
))2 + sin2(πx1d
)sinh2
(πx2d
))3/2, (16)
H2(x1, x2) =π3V 2
0
(2 cos(πq) cos
(πx1d
)sinh
(πx2d
)− sinh
(2πx1d
))8d3K
(cos(πq2
))2 ((cos(πq)− cos(πx1d
)cosh
(πx2d
))2 + sin2(πx1d
)sinh2
(πx2d
))3/2, (17)
With this assumption, we approximate the above expres-sions as follows:
H1(x1, x2) ≈ π3V 20
d3K(
1√2
)2 e−3πx2 sin (2πx1) ≈ 0,
H2(x1, x2) ≈ − π3V 20
2d3K(
1√2
)2 e−πx2 .
With this approximation, equations (13)-(15) get simplifiedas
˙x1 = 0, (18)˙x2 = k1(byu+ au2)e−πx2 , (19)y = −cy + u. (20)
where
k1 =π3V 2
0
2kd4K(
1√2
)2 .
For the model described by (18)-(20), the n-DEP and p-DEP velocity fields are illustrated in Figure 3. In the modelderived sofar, note that no fluid flow has been assumed. In thenext section we consider the effect of an electro-thermallyinduced fluid flow on the trajectory of the particle under theinfluence of a DEP force.
Fig. 2. Plot of (H1(x1, x2), H2(x1, x2)). Note that far from the electrodeH1(x1, x2) ≈ 0.
III. 2D-PLANAR DEP MODEL WITHELECTRO-THERMALLY INDUCED FLUID MOTION
In typical applications of dielectrophoresis, the appliedelectric field induces fluid motion through electro-kineticphenomena such as electro-thermal flow. The non-uniformelectric field produces a temperature gradient within the fluiddue to electrode heating. This temperature gradient in turnproduces gradient in permittivity and conductivity of the fluidresulting in electro-thermal fluid flow (see Section 3.7 in [4]for more details). A stream function to describe this observedcellular flow has been stated in [10] as
ψ = u0x22e− x2β cos (πx1) ,
where u0 is a constant that decides the flow velocity and βdecides the vertical position of the center of the rolls formeddue to electro-thermally induced fluid flow. Once we havea stream function, the fluid velocity in x1 and x2 directionsare given by u1 = ∂ψ
∂x2and u2 = − ∂ψ
∂x1respectively. The
velocity field obtained using this stream function is shownin Figure 4. With this fluid flow model, the system equations(18)-(20) get modified as
˙x1 =u0
β(2β − x2) x2e
− x2β cos (πx1) , (21)
˙x2 = πu0x22e− x2β sin (πx1) + vdep(t)e−πx2 , (22)
y = −cy + u. (23)
Fig. 4. Electro-thermally induced fluid flow.

(a) n-DEP. (b) p-DEP.
Fig. 3. Velocity fields.
where
vdep(t) , k1(by(t)u(t) + au2(t)). (24)
is the time dependent dielectrophoretic term in the model. Inpractice, even in relatively nonviscous fluids, the motion ofthe particles in the range 1µm to 1000µm due to the time-varying term is usually damped heavily by the viscosity ofthe suspending medium (see [6] and the references therein).Therefore, in our further analysis of the equations (21)-(23),we could as well use the time-averaged expression for vdep
given as
vdep = limT→∞
1T
∫ T
0
vdep(t)dt. (25)
Now rewriting equations (21)-(23) using the time-averagedexpression vdep, we have
˙x1 =u0
β(2β − x2) x2e
− x2β cos (πx1) , (26)
˙x2 = πu0x22e− x2β sin (πx1) + vdepe
−πx2 . (27)
We will now find the equilibrium points for the system in(26)-(27) and study their nature through linearization.
Due to the symmetry in x1 and also since the model is notvalid close to the electrodes, we restrict our analysis to thedomain cl(D), where D , {(x1, x2)| − 1
2 < x1 <12 , x2 ≥
ε > 0}. Note that ˙x1 = 0 implies x∗2 = 2β or cos (πx1) = 0and hence x∗1 = ± 1
2 . Each of these cases is studied next.
A. Equilibrium point on x2 = 2βHere we restrict our analysis to the domain D (and
not cl(D)) since the equilibrium points on x1 = ± 12 are
examined in the next subsection. Therefore, we need tofind (x1, x2 = 2β) ∈ D such that ˙x2 = 0. Therefore,˙x2(x∗1, x
∗2 = 2β) = 0 implies
x∗1(vdep) = − 1π
sin−1
(e2(1−πβ)
4πu0β2vdep
).
The above equation has a solution in the domain D iff vdep
is such that
|vdep| < 4πu0β2e2(πβ−1). (28)
In the rest of this section we assume that this condition issatisfied by vdep. We will next analyze the nature of theequilibrium point through linearization.Nature of the equilibrium point: The Jacobian at theequilibrium point is given by
J∗ = 0 − 2u0e2
√1− e4−4πβ v2dep
16π2β4u20
πβ2u0e2
√16π2 − e4−4πβ v2dep
β4u20
−e−2πβ v2depπ
and the corresponding eigenvalues are
λ1 =e−2πβ
2β
(−√v2
dep (π2β2 + 2)− 32π2u20e
4πβ−4β4
− πvdepβ),
λ2 =e−2πβ
2β
(√v2
dep (π2β2 + 2)− 32π2u20e
4πβ−4β4
− πvdepβ).
We have two cases depending on the sign of the term insidethe square root in the above expressions for eigenvalues:Case 1 (v2
dep
(π2β2 + 2
)− 32π2u2
0e4πβ−4β4 < 0):
In this case, the eigenvalues are complex and the sign ofthe real part depends on the sign of vdep.Case 2 (v2
dep
(π2β2 + 2
)− 32π2u2
0e4πβ−4β4 > 0):
From the condition in (28), we have 2v2dep <
32π2u20e
4πβ−4β4. Therefore
0 < v2dep
(π2β2 + 2
)− 32π2u2
0e4πβ−4β4 < v2
depπ2β2,

(a) Unstable foci with vdep < 0. (b) Stable foci with vdep > 0.
Fig. 5. Trapping zones.
such that, if vdep > 0, we have√v2
dep (π2β2 + 2)− 32π2u20e
4πβ−4β4 < vdepπβ,
else (vdep < 0),√v2
dep (π2β2 + 2)− 32π2u20e
4πβ−4β4 < −vdepπβ.
Hence the eigenvalues λ1 and λ2 are both negative ifvdep > 0, positive otherwise. Therefore, in either case,the equilibrium point is a stable focus/node if vdep > 0and it is an unstable focus/node if vdep < 0. Hence, fornegative-DEP (vdep > 0), the particles get trapped in asmall region situated above the inter-electrode gaps. Thisanalytically shows that the particle trapping in presence ofan electrothermal fluid flow noticed in [3], [5], [7], [9] isdue to negative-DEP. For particles experiencing a DEP forcein the presence of an electrothermal fluid flow, velocityfields with stable and unstable foci are illustrated in Figure 5.
A note on the condition on vdep: The condition onvdep given by equation (28) can also be seen as a conditionon the particle radius for a given DEP force and a givenu0. Using (8), (9), (24) and (25) in (28), we deduce thecondition on the particle radius r for the existence of atrapping zone, as
r < γ√u0, (29)
where
γ =2d2βe(πβ−1)K
(1√2
)πV0
√3ηk1(εp + 2εm)εm|(εp − εm)vdep|
. (30)
This gives rise to a bifurcation in the parameter space (u0, r)defining a region where a trapping zone exists. This has beenreported in [10] as well. A typical plot of u0 versus r isillustrated in Figure 6.
B. Equilibrium point/points on x1 = ± 12
In this case, ˙x2(x1 = ± 12 , x2) = 0 implies
x22e
(πβ−1β )x2 = ∓ vdep
πu0. (31)
Note that the existence and uniqueness of a solution for x2
in equation (31) depends on the signs of the terms vdep andπβ−1. An equilibrium point exists on the x1 = 1
2 line only ifvdep < 0 and similarly on the x1 = − 1
2 line only if vdep > 0.Assuming that this condition is satisfied, the existence anduniqueness (which depends on the sign of πβ − 1) of thesolution are studied next.Case 1
(β ≥ 1
π
): The LHS of the equation (31) is such that
d
dx2x2
2e(πβ−1
β )x2 =x2e
x2(πβ−1)β (x2(πβ − 1) + 2β)
β> 0,
limx2→0
x22e
(πβ−1β )x2 = 0,
limx2→∞
x22e
(πβ−1β )x2 =∞.
Therefore x22e
(πβ−1β )x2 is a continuously increasing function
of x2. Hence (31) has unique solution. Further, since we
Fig. 6. Parameter space (u0, r): Trapping zones are formed if the particleradius belongs to the shaded region.

TABLE IANALYSIS OF THE EQUILIBRIUM POINT/POINTS ON x∗1 = ± 1
2.
Number of Condition Sign of λ1 and λ2
Equilibrium on x∗2 x∗1 = 12
x∗1 = − 12
points (vdep < 0) (vdep > 0)(β ≥ 1
π
)1 x∗2(vdep) < 2β λ1 < 0, λ2 > 0 λ1 > 0, λ2 < 0
x∗2(vdep) < 2β < 2β1−πβ λ1 < 0, λ2 > 0 λ1 > 0, λ2 < 0(
β < 1π
)2
x∗2(vdep) > 2β1−πβ > 2β λ1 > 0, λ2 < 0 λ1 < 0, λ2 > 0
have a condition on |vdep| in (28), the unique solution forequation (31) is such that x∗2(vdep) < 2β.Case 2
(β < 1
π
): In this case, we have a solution only if
|vdep| ≤4πu0β
2e−2
(πβ − 1)2. (32)
Since e−2
(πβ−1)2 > e2(πβ−1), from (28) and (32) we have
|vdep| < 4πu0β2e2(πβ−1) <
4πu0β2e−2
(πβ − 1)2.
Therefore, the condition in (28) ensures that the condition in(32) is satisfied. Also, we have two solutions for the equation(31): one solution is such that x∗2(vdep) < 2β < 2β
1−πβ andanother is such that x∗2(vdep) > 2β
1−πβ > 2β.The nature of these equilibrium points and their depen-
dence on vdep are studied next.Nature of the equilibrium points: Let x∗2 be a solution(in case of β ≥ 1
π ) or one of the solutions (in case ofβ < 1
π ) of the equation (31). Then the Jacobian evaluated atthe equilibrium point (x∗1 = ± 1
2 , x∗2) is given by
J∗ = ±e−x∗2β πu0x
∗2(x∗2−2β)
β 0
0 ±e−x∗2β πu0(2β−x∗2)x∗2−e
−πx∗2πβvdepβ
and the corresponding eigenvalues are
λ1 = ±πu0x∗2e− x
∗2β (x∗2 − 2β)β
λ2 =vdepe
−πx∗2
βx∗2(x∗2(1− πβ)− 2β)
The sign of λ1 and λ2 under different cases are summarizedin Table I. Note that in either case (β ≥ 1
π or β < 1π ), we
have λ1λ2 < 0 and hence the equilibrium point/points onx∗1 = ± 1
2 is/are always saddle points irrespective of the signof the parameter vdep.
The findings in this section are validated in the next sectionusing a finite element simulation software.
IV. SIMULATION RESULTS
From the discussions in the previous section we conclude:1) Trapping zones are formed only if the particle radius
satisfies the condition in (29).2) Trapping zones are stable if vdep > 0 (n-DEP) and
are unstable otherwise.We use the finite element simulation software COMSOLMultiphysics to validate our results.
A. Model Geometry
The model geometry is shown in Figure 7. It consistsof a channel section of height 80µm and length 450µm.Four electrodes, each 50µm wide, are placed on the lowerboundary of the channel with an inter-electrode gap of 50µm.
The model assumes that the fluid in the channel is water.Also, we assume that the electrodes are perfect heat conduc-tors. They remain at a constant ambient temperature, while atthe inlet and the outlet, the temperature gradually approachesthe ambient. The model further assumes that the channel isthermally and electrically insulated at all other boundaries.
Fig. 7. Model geometry for the microchannel with electrodes.
B. Electro-thermally Induced Fluid Flow
The four electrodes produce an electric field that givesrise to a nonuniform temperature field through Joule heatingwhich in turn causes fluid motion. At steady state, theelectro-thermal force per unit volume [9] is given by
fE = −12
[(∇σm
σm− ∇εm
εm
)·E εmE
1 + (ωτ)2+
12|E|2∇εm
],

where ω is the frequency of the applied electric field E andτ = εm
σmis the fluid’s charge relaxation time. With this, the
motion of fluid is determined by solving the Stoke’s equation.For water, with (1/εm)(∂εm/∂T ) = −0.004 K−1 and(1/σm)(∂σm/∂T ) = 0.02 K−1, the temperature gradientand the corresponding electro-thermal fluid flow are shownin Figure 9(a) and Figure 9(b).
C. DEP Force
For an applied electric field E(q, t) = E0(q) cos(ωt), thetime-averaged DEP force on a particle is given by [6]
〈FDEP〉(q, t) = limT→∞
1T
∫ T
0
FDEPdt
= 2πr3εm Re[K(jω)]∇|E|2,
where K(jω) is the Clausius-Mossotti function as defined in(3) and q is the spatial variable. We consider a system withparticles suspended in water with the electrical properties ofthe particle and fluid given by
σm = 5.75× 10−2 S/m, σp = 2.75× 10−2 S/m,εm = 80.2ε0 F/m, εp = 100ε0 F/m,
where ε0 = 8.854188 × 10−12 F/m, is the permittivity offree space. The plot of the Clausius-Mossotti function isshown in Figure 8. Note that the cross over frequency ωcfrom n-DEP to p-DEP is of the order of 108Hz.
Trajectories of the particles under the influence of DEPforce in the presence of an electro-thermally induced fluidflow are shown in Figure 10(a)-10(d). Note that the stabletrapping zones are formed (Figure 10(a)) for frequency ω =10MHz (< ωc) when the particle is under the influence ofnegative-DEP force, while the unstable trapping zones areformed (Figure 10(b)) for frequency ω = 1GHz (> ωc)when the particle is under the influence of positive-DEPforce. When we increase the particle size from 0.5µm to2.5µm, the trapping zones disappear as shown in Figure10(c) and Figure 10(d) for frequencies ω = 10MHz andω = 1GHz respectively. These simulation results agree withour findings in Section III.
Fig. 8. Clausius-Mossotti function: Note that the cross over frequency isωc ≈ 108Hz .
V. CONCLUSION AND FUTURE WORK
A 2D-planar analytical model incorporating the impactof the electro-thermal fluid motion induced by the appliedelectric field has been presented for a particle under theinfluence of a DEP force. It is noticed that the combinedeffect of the DEP force and the electro-thermally inducedfluid flow leads to the formation of trapping zones whosestability depends on the sign of the time-averaged DEP force.For the case when the particle experiences a negative-DEPforce, trapping zones are stable and particles tend to gettrapped in a region above the inter-electrode space. It isalso noticed that the formation of trapping zones dependon the particle radius. This has an interesting application inparticle sorting. For particles of different dimensions, we canapply an electric field such that particles of a particular sizegets trapped due to the negative-DEP force, while others getescaped from the trapping zone. We have used COMSOL tovalidate our results. The simulation results are in agreementwith our proposed model.
The model derived in this paper explains the dynam-ics away from the electrodes. There are zones close tothe electrode surface where particles get collected due topositive-DEP. Deriving an analytical model that captures thisphenomena is an interesting avenue for future work.
VI. ACKNOWLEDGMENTS
The authors would like to thank professor D. E. Changfor introducing them the field of modeling and control of adielectrophoretic system.
REFERENCES
[1] D E Chang, S Loire, and I Mezic. Closed-form solutions in theelectrical field analysis for dielectrophoretic and travelling wave in-terdigitated electrode arrays. Journal of Physics D: Applied Physics,36(23):3073–3078, 2003.
[2] D E Chang and N Petit. Toward controlling dielectrophoresis. Int.J.Robust Nonlinear Control, 15(16):769–784, 2005.
[3] N G Green and H Morgan. Dielectrophoretic investigations of sub-micrometre latex spheres. Journal of Physics D: Applied Physics,30(18):2626–2633, 1997. Cited By (since 1996): 62.
[4] M P Hughes. Nanoelectromechanics in Engineering and Biology. CRCPress, 2002.
[5] M P Hughes and H Morgan. Dielectrophoretic trapping of single sub-micrometre scale bioparticles. Journal of Physics D: Applied Physics,31(17):2205–2210, 1998. Cited By (since 1996): 53.
[6] T B Jones. Electromechanics of Particles. Cambridge University Press,1995.
[7] T Muller, A Gerardino, T Schnelle, S G Shirley, F Bordoni,G De Gasperis, R Leoni, and G Fuhr. Trapping of micrometre andsub-micrometre particles by high-frequency electric fields and hydro-dynamic forces. Journal of Physics D: Applied Physics, 29(2):340–349, 1996. Cited By (since 1996): 108.
[8] H A Pohl. Dielectrophoresis. Cambridge University Press, 1978.[9] A Ramos, H Morgan, N G Green, and A Castellanos. Ac electroki-
netics: A review of forces in microelectrode structures. Journal ofPhysics D: Applied Physics, 31:3338–3353, 1998.
[10] Idan Tuval, Igor Mezic, Frdric Bottausci, Yanting T. Zhang, Noel C.MacDonald, and Oreste Piro1. Control of particles in microelectrodedevices. Journal of Physics D: Applied Physics, 36(23):3073–3078,2003.

(a) Temperature gradient produced by joule heating.
(b) Electro thermal fluid flow.
Fig. 9. Temperature gradient and the resulting electro thermal fluid flow.
(a) Stable trapping zones (due to n-DEP) at ω = 10MHz and particle radius of 0.5µm.
(b) Unstable trapping (due to p-DEP) zone at ω = 1GHz and particle radius of 0.5µm .
(c) Particle trajectories at ω = 10MHz and particle radius of 2.5µm.
(d) Particle trajectories at ω = 1GHz and particle radius of 2.5µm.
Fig. 10. Simulation results.