8. Plate kinematics, rigid plate motions, plate-fixed reference frames
62
Lecture 8: Plate Kinema1cs GEOS 655 Tectonic Geodesy
Transcript of 8. Plate kinematics, rigid plate motions, plate-fixed reference frames

Lecture8:PlateKinema1cs
GEOS655TectonicGeodesy

TectonicAc1vity

BasicsofPlateTectonics
• ReviewofPrinciples– Rigidplates,deformingonlyatboundaries(approx)– Typesofplateboundaries
• Descrip1onofmo1ons– Rigidbodymo1ononasphereisrota%onaboutageocentricaxis
– Angularvelocity,poleofrota1on• Quan1fica1onwithGeodesy
– Es1matesiteveloci1esfromangularvelocity– Es1mateangularvelocityfromsiteveloci1es

DrivenByHeat

Lisa WaldUSGS Pasadena
U.S. Department of the Interior U.S. Geological Survey
USGS Earthquake Hazards Program
PlateTectonics

PlateBoundaries• Platesarerigid,sorela1vemo1onsbetweenplatesoccurontheirboundaries
• Inreality,plateboundariesalwayshavesomefinitewidth–plateboundaryzones– Some1mesnarrow,<10km– Some1mesverywide,500-1000km
• Rela1vemo1onoccursonfaults,orbreaksintheEarth’slithosphere.

RidgesandTransforms

PlateBoundaries

Faults
• Faultsaresurfaces,usually~planar,wherethetwosidesmoverela1vetoeachother.– Direc1onofmo1on==slipdirec1on
• Howslipoccursdependsondepth– Shallow:sidesaremostlystucktogetherbyfric1on,butslipssuddenlyinearthquakes
– Deeper:sidesmostlyslidepasteachotheratasteadyrate
• Platetectonicsdrivesthemo1on

ThreeTypesofFaults
Strike-Slip Thrust
Normal

PlateMo1onMovies

WatchMo1ononTransformFaults

Rota1ononaSphere• Anyrigidmo1ononthe
surfaceofasphereisarota1onaboutageocentricaxis.– Alltectonicmo1onscanbe
describedintermsofrota1ons
• Two(equivalent)waystodescriberota1on– Poleofrota1onandangular
speed– Angularvelocityvector
• Canusethisforanysizeplateorpieceofcrust

PoleofRota1on

GeologicPlateMo1onModels
• Rela1veplatemo1onmodelsbasedonsomecombina1onof– Spreadingratesatmid-oceanridges
• Frommodelingofmarinemagne1canomalies
– Transformfaultazimuths– Earthquakeslipvectors
• Theseareproblema1c
• Someplateshaveli_leornodata,forexampletheCaribbeanandPhilippineSeaPlates
• Commonlyused:NUVEL-1,revisedtoNUVEL-1A• Newermodel:MORVEL(DeMetsetal.,2010)

Absolutevs.Rela1veMo1ons
• Mostevidenceforplatemo1onsaremeasuresofrela1veplatemo1on–mo1onofBrela1vetoA– Rela1vemo1onfromgeodesy– Plateboundarydeforma1on
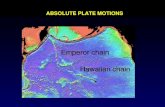
• Absoluteplatemo1onsdependonsomeexternallydefinedreferenceframe– Hotspotreferenceframe
• Exceptthehotspotsmoverela1vetoeachother
– “Nonetrota1on”==Nonettorque• Platemo1onsdefinedinageode1creferenceframe


Oblique Mercator Projection About Pole

Es1ma1ngSiteVeloci1es
• Itiseasiesttocomputethesiteveloci1esifyouhavetheplate’sangularvelocityvector,becausethesitevelocityisjustthecrossproductofthesiteloca1onvectorwiththeplateangularvelocity:
• Youcancomputeitfromthepoleloca1onaswell,butthatrequiressphericaltrigonometry.
€
v =ω × r

Es1ma1ngPlateAngularVelocity• Togettheangularvelocityfromsiteveloci1es,weneedto
inverttheequa1on
• Expandthecrossproductandrewriteitasamatrixequa1on
€
v =ω × r
€
v = zω3 − yω2( ) ˆ x + xω3 − zω1( ) ˆ y + yω1 − xω2( ) ˆ z
v1 = zω3 − yω2
v2 = −zω1 + xω3
v3 = yω1 − xω2
⎛
⎝
⎜ ⎜ ⎜
⎞
⎠
⎟ ⎟ ⎟
v1
v2
v3
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
=
0 z −y−z 0 xy −x 0
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥
⋅
ω1
ω2
ω3
⎡
⎣
⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥

HowManySitesDoYouNeed?• Thereare3parametersintheplateangularvelocityvector
• Thereare3dataineachsitevelocity– Buttheplatemodelpredictsnover1cal,soonlythehorizontalvelocitycomponentscount
• Youneedatleast2sitestoconstraintheplateangularvelocityvector
• Themoresites,andthefartheraparttheyare,thebe_ertheangularvelocityisdetermined.

NOAMPoles• Withpaststudies,itis
commonthatNOAMpolesdonotliewithin95%confidenceellipsesofotherstudies– Systema1cerrorsor
missinguncertainty
• DifferencebetweenSNARFandSellaisarota1onaboutapoleintheSEUnitedStates.

WhatPartofAngularVelocityisConstrainedbyasinglesite’sdata?
• Theleastcertaincomponentoftheplate’sangularvelocityvectorisarota1onaboutanaxisthroughthecentroidofthenetwork.
• Considertheangularvelocityvectoroftheplateexpressedinthelocaleast-north-upcoordinatesatapar1cularsite:
€
ω =ωx ˆ x +ωy ˆ y +ωz ˆ z ω =ωe ˆ e +ωn ˆ n +ωr ˆ r

Thesite’svelocityis
• Twocomponentsoftheplateangularvelocityaredirectlydeterminedbythesite’svelocity,whilethethird(localver1calcomponent)iscompletelyundetermined.€
v = ve ˆ e + vn ˆ n =ω × rve ˆ e + vn ˆ n = (ωe ˆ e × Rˆ r ) + (ωn ˆ n × Rˆ r ) + (ωr ˆ r × Rˆ r )ve ˆ e + vn ˆ n = Rωn ˆ e − Rωe ˆ n + 0ˆ r
€
ωe = −vn /Rωn = +ve /Rωr = ?
• When sites span a small area, their local vertical directions will be similar, and this component of the angular velocity will be the least well determined.
0

MoreAboutAngularVelocity
• Wecouldresolvetheundeterminedcomponentbytakingaminimumnormsolu1on:
• In this case the pole is located 90° away from the site. • The pole could also be located anywhere on the great circle that
lies between this minimum-norm solution and the site itself. • The component of the angular velocity in the average radial
direction will naturally be the least constrained. €
ωr = 0 ; ∴ω ⋅ r = 0

Example1:TheREVEL-2000Model
Sella et al. (2002, JGR, doi:10.1029/2000JB000033)

Details
• Globalplatemo1onmodelbaseden1relyonGPSdata
• Dataspanfromearly1990supthrough2000.• Combinedmanycon1nuoussitesandalsorepeatedcampaignsurveydata
• Firstmodeltohaveessen1allycompleteglobalcoverage.

DataUsedinModel
• Long1meseriesofdatainITRF97frame,basedonprecisepointposi1oning(PPP)solu1ons
• Fitlineartrendsplusoffsets,combinedco-locatedsites
• Outlierrejec1onandqualitycontrol

Australia–Antarc1ca

Arabia–Eurasia

Nazca–Antarc1ca

Nazca–Pacific

NazcaPlateMo1onOverTime

Pacific–NorthAmerica

Example2:GEODVEL(Argusetal.,2010)

GEODVELDetails
• Basedonacombinedsolu1onofGPS,VLBI,SLR,DORIS,inITRF2005.
• Includesanes1mateofgeocentererrorinITRF2005(es1matederrorisabout1.2mm/yrinZdirec1on).
• Rela1veplateangularveloci1esarees1mated.ArgushasalsoprovidedabsoluteplatepolessuitableforcomparisonwithITRFveloci1es.

ComparisonofPolesandRates

GEODVELResiduals

GEODVELResiduals

GEODVELResiduals
• FormerAfricanplatesplitintotwoplatesatEastAfricanRin– Nubia– Somalia
• dd

GEODVELPoleLoca1ons

Plate-FixedReferenceFrame
• Plate-fixedreferenceframesareveryconvenientforvisualizingandmodelingtectonicdeforma1on.
• Touseaplate-fixedframe,weneedtohaveanes1mateoftheplatemo1oninthesamegeode1cframeofourdata.
• Thetransforma1onissimple.Justsubtractthepredictedmo1onbasedontheplateangularvelocityfromeachsite’sobservedvelocity.

ITRFvs.Plate-fixedframe


WesternNorthAmerica
• Deforma1onofwesternNorthAmericaresultsfromacombina1onof:– ExtensionacrossBasinandRange
– ShearonSanAndreasfaultsystem
– Subduc1onstraininCascadiaandAlaska
– Distributeddeforma1oninN.CanadaandAlaska

BacktoReferenceFrames
• SmalldifferencesbetweendifferentversionsofITRFturnouttobebigenoughtoaffectes1matedplaterota1ons.– Orienta1ondifferences(rota1ons)betweenframesaffectabsoluteangularveloci1es,butaffectallplatesequally(rela1veplateveloci1esarenotaffected).
– Geocenterdifferences(transla1ons)affectbothabsoluteandrela1veveloci1es.

ImpactofGeocenterError• Supposeourframehasan
errorinthegeocenter.Howaresiteveloci1esaffected?– Suchanerrorproducesa
combina1onofver1calandhorizontalmo1on,dependingonsiteloca1on.
– Theerroraffectseachplatedifferently
– Impactonangularvelocitydependsonsitedistribu1on.

ITRF2000Veloci1es–Sellapole

ITRF2000Veloci1es–otherpoles
Black – Sella 2007 White – REVEL Yellow – SNARF
Note systematic residual in REVEL, 2-3 mm/yr. REVEL used ITRF97.

NOAMPoles• Withpaststudies,itis
commonthatNOAMpolesdonotliewithin95%confidenceellipsesofotherstudies– Systema1cerrorsor
missinguncertainty
• DifferencebetweenSNARFandSellaisarota1onaboutapoleintheSEUnitedStates.

WhyisNOAMpolepoorlydetermined?
• Ac1veTectonicsinwesternNorthAmerica
• GlacialIsosta1cAdjustmentinnorthernNorthAmerica
• OnlytheSEpartisstablebothongeologicandgeode1c1mescales.
• Limitedareafordetermina1onofplateangularvelocity,andsuscep1bletobias.

Addi1onalUncertaintyRota1onOnly

UncertaintyinITRF
• UncertaintyinITRFcommonlyignored.• TheTZratedifference(1.8mm/yr)betweenITRF2005andITRF2000hasgo_enalotofa_en1on.
• Theremayactuallybeasimilar(orlarger)differencebetweenITRF2000andITRF97
• Ifso,uncertaintyinframe(geocenterorigin)maybemuchlargerthanprecisionofGPSbaselinerates.

Howtodefinethe14parameters?«DatumdefiniAon»
• Origin&rate: CoM(DynamicalTechniques)• Scale&rate: dependsonphysicalparameters• OrientaAon: convenAonal• Orient.Rate:convenAonal:Geophysicalmeaning
(TectonicPlateMoAon)• ==>LackofinformaAonforsomeparameters:
– OrientaAon&rate(alltechniques)– Origin&rateincaseofVLBI– ==>RankDeficiencyintermsofNormalEq.System

GeocenterMoAonTranslaAonalmoAonofthetrackingnetworkduetovariaAonoftheCoMposiAoninducedbymassredistribuAon
– Likelyinvolvesperiodicandsecularcomponents– SatellitetechniqueshavelimitedabiliAestoaccuratelymeasurethismoAon
– TRForiginfromsatellitetechniquescoincideswiththeCoMaveragedovertheperiodoftheusedobservaAons

InternaAonalTerrestrialReferenceSystem(ITRS):DefiniAon
• Origin:CenterofmassofthewholeEarth,includingoceansandatmosphere
• Unitoflength:meterSI,consistentwithTCG(GeocentricCoordinateTime)
• OrientaAon:consistentwithBIH(BureauInternaAonaldel’Heure)orientaAonat1984.0.
• OrientaAonAmeevoluAon:ensuredbyusingaNo-Net-RotaAon-CondiAonw.r.t.horizontaltectonicmoAonsoverthewholeEarth

StrategyforAugmentedCovariance
• SellaandSNARFdifferbyalmost1mm/yrinAlaska,significantrela1vetoCGPSsiteveloci1es,andwereallycan’ttellwhichis“right”
• Wethusaugmentthecovarianceintwoways:– AddanuncertaintycorrespondingtothedifferenceinangularvelocitybetweenSellaandSNARF
– AddanuncertaintyinZdotof1.8mm/yrasaconserva1veuncertaintyintheITRF.

Addi1onalUncertaintyRota1on+Zdot

AugmentedCovariance

ITRF2008horizontalvelociAes

ITRF2008verAcalsitevelociAes