788.11J Presentation “Herding Cows with Sensors” Presented by Ryan Boder.
6
788.11J Presentation “Herding Cows with Sensors” Presented by Ryan Boder
-
Upload
elijah-flynn -
Category
Documents
-
view
212 -
download
0
Transcript of 788.11J Presentation “Herding Cows with Sensors” Presented by Ryan Boder.

788.11J Presentation“Herding Cows with Sensors”
Presented by Ryan Boder

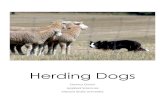
The Main Idea
• Herd cattle from one place to another using mobile virtual fences similar to those used to keep domestic pets in a yard.
• Use robot path planning theory to guide the virtual paddocks

The Main Achievements
•Developed path planning algorithm that was effective in simulation, but not on real cows
•The main contribution was a method for path planning an area (paddock) with moving walls as opposed to a a single point such as a robot
•Optimized the computationally intensive path search so that it could be performed easily on a PDA

The Challenges
• Animal state is only partially observable
•No direct control over animals actions
•Connectivity to base station from far away
•Cows didn't respond to sounds
•Many dimensions in path planning for a dynamic polygon

Pictures

Innovation
• An example of a sensor application that performs actuation, not just data collection
•Provides an alternative to using a border collie or robot herder
•If successful would give farmers much better control over herds than they have today