731-741 Users Guide i2
68
Users Guide for ProPilots 731 & 741 Issue 02 for use with version V3.00 software (or later) in the Pilot Computer
-
Upload
jimihendrix58 -
Category
Documents
-
view
299 -
download
41
Transcript of 731-741 Users Guide i2

User�s Guidefor
ProPilots 731 & 741
Issue 02for use with
version V3.00 software (or later) in the Pilot Computer

ProPilots 731 and 741
2
EMC Directive 89/336/EEC
This product has been designed to be compliant with the above Directive.
Maximum performance and compliance with the EMC Directive can only be
ensured by correct installation. It is strongly recommended that the
installation conforms with the following standards:
SMALL CRAFT - ELECTRICAL SYSTEMS:a) ISO 10133 - Extra Low-Voltage DC Installations
b) ISO 13297 - Alternating Current Installations
ISO - International Standards Organisation

3
Welcome ....All of us at would like to welcome you to the reliable
world of our autopilot systems and thank you for buying ourproduct.
Your new autopilot is quick and easy to operate. It willconsistently steer your boat on a straight course, helping togive optimum fuel economy and minimise wear on yoursteering system.
Your Safety It is the responsibility of the Helmsman to ensure andmaintain the safe navigation and control of thevessel at all times. The autopilot is only an aid tosteering, suitable for unconfined waters.
Your System The system consists of the following basic units:
� Autopilot Control� Pilot Computer� Compass Sensor� Rudder Feedback Unit� Drive Unit for the steering system
It may also include options such as:� a second autopilot control� connections to a chartplotter or navigator� connections to instruments� a proportional steer control
These options can be added to the system at any time. YourCetrekCetrekCetrekCetrekCetrek Dealer will be glad to give you the latest informationon any of them.
DocumentReference:
807310Issue 02
March 1999
The information contained in this manual is believed to be accurate at the
time of going to print but no responsibility, direct or consequential, can be
accepted by Cetrek Ltd for damage resulting from the use of this
information. Cetrek Ltd reserve the right to make changes without notice to
any of its products, documentation or services. © Cetrek Ltd 1999

ProPilots 731 and 741
4
Contents
1. Using the Pilot ..................................................71.1 The Autopilot Control ............................. 71.2 The LCD display .................................... 91.3 The Function Keys ................................. 91.4 Getting started ................................... 101.5 Standby mode (Manual steering) ............. 111.6 Jog Steer .......................................... 111.7 Auto mode (with�COMPASS� control ) ..... 111.8 Selecting how the Arrow Keys function ..... 12
Dodge ............................................. 12Changing course ................................. 13
1.9 The Information display ........................ 131.10 Rudder Position Indicator ...................... 151.11 Digital Rudder position display ................ 151.12 Pilot A, B, C (619 only) .......................... 161.13 Lighting ........................................... 16
2. Compass course control .................................17To engage Compass course control .......... 17Using two magnetic compass� ................ 17Compass Difference Alarm ..................... 18
3. Gyro compass control (619 only) ...................19Switching between Compass�. ................ 19Compass Difference Alarm ..................... 20
4. Navigator course control................................214.1 NMEA 0183 messages .......................... 224.2 Using Navigator control ........................ 234.3 Selecting a Navigator ........................... 234.4 To engage Navigator control .................. 234.5 Navigator errors ................................. 25
5. Sea State Adjustments ...................................265.1 Rudder ratio ...................................... 265.2 Response (also known as Yaw). ............... 26
Adaptive control ................................. 27Manual control .................................. 27
5.3 Turn Rate (619 Pilot Computers only) ........ 28

5
6. Installing the Pilot ..........................................316.1 Specifications .................................... 316.2 Mounting the Autopilot Control .............. 32
Pilot 731 .......................................... 32Pilot 741 .......................................... 33
6.3 Connecting the Pilot Control .................. 34
7. Dockside and Sea trial settings ......................35Using the settings menus ...................... 35
Dockside Settings ...........................................367.1 Powering up for the first time ................. 367.2 Setting the Rudder Feedback type. ........... 367.3 Setting the Boat Type. .......................... 377.4 Rudder settings routine ........................ 387.5 Align Compass ................................... 397.6 Checking the settings ........................... 40
Sea Trials .........................................................427.7 Automatic Compass Deviation Correction ... 427.8 Compass alignment ............................. 44
Checking the compass settings ............... 447.9 Center Rudder .................................... 447.10 Final Sea Trial and Fine Tuning ................ 45
8. Pilot configuration reference .........................468.33 Configuration menu summary ................ 61
9. System Messages............................................6210. System Faults ..................................................6311. Rudder Angle Template ..................................6512. Default settings ..............................................66
Index....................................................... 67

ProPilots 731 and 741
6
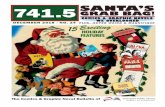
Liquid CrystalDisplay
Function keys
Course controlknob
731 ProPilot Control
741 ProPilot Control

7
1.1.1.1.1. Using the PilotUsing the PilotUsing the PilotUsing the PilotUsing the Pilot
1.1 The Autopilot Control
The Pilot Control is where the helmsman controls all of thefunctions of the autopilot system. Operation has been keptvery simple with just 6 function keys and a Course ControlKnob.
The LCD constantly displays autopilot related data; Autopilotstatus, Heading or Course, Rudder Position and Coursecontrol device.
It also has an information display area across the top of theLCD. From there you can quickly access and change Sea Statesettings. You can also choose which of the available NMEAinformation is shown here, giving you quick access toinformation relevant to you.
Course changing is a simple turn of the Course control knobor a press of the direction key.
The direction keys can be either used for Course change orDodge. Course change can be either 1º per press or 10º perpress. Dodge is an easy means of momentarily changingcourse to avoid an obstruction, release the key and the pilotreturns you back to your original course.
In an EMERGENCY press and hold the key forthree seconds to turn the autopilot OFF and regainmanual control.

ProPilots 731 and 741
8
Functionality of the Pilot system is dependant on the PilotComputer fitted. The basic unit is the 930609, the enhancedunit is the 930619.
This User�s Guide covers both systems. Parts that are relevantonly to the 619 are marked as such.
A summary of the extra features a 619 systems has:
� 3 memory settings, PILOT A, B & C.
� up to 3 navigators can be connected and easily selected.
� a Gyro compass can be used.
� a �Turn Rate� setting is available.
� an external alarm connection is available.
� a Rate sensor connection is available.
Audible warning Device.
The Pilot 741 has an audible warning device in the form of abuzzer that accompanies any alarm, and confirms any keypresses.

9
1.2 The LCD display
The LCD Display
1.3 The Function Keys
� powers up (turns on) the autopilot system.� with the system powered up, toggles between Standby
and Auto mode.� press and hold for three seconds to switch the system OFF
and save any changed settings.� Accepts new course in Manual waypoint sequence.
� changes the brightness of the LCDs backlight.
� steps through selected Sea State & NMEA information.� press and hold for three seconds to access the full list of
settings and information that may be viewed.
� selects the course control device; Compass or Navigator.� press and hold for three seconds to display the Pilot
Configuration Menu.� supresses any alarm to allow changes.� press and hold the and keys together for three
seconds to access the Dockside and Sea Trial Menus.
� to Dodge, Change course in Auto mode.� moves the rudder in Standby mode (Jog steer).� changes the values of the settings.
Course Control knob� to change course in Auto mode.� changes value in some menus.
Autopilot status symbols
Information display
Course controlindicators
Alarm symbol
Heading andCourse display
Rudder positionindicator
Steering motoractivity indicators

ProPilots 731 and 741
1 0
1.4 Getting started
The pilot will always be in 1 of 2 basic modes of operation:
1. This symbol displayed on the right of the LCD, indicatesthat the pilot is in Standby mode allowing manual controlof the steering. The Pilot is switched on, but not in controlof the vessel rudder.
2. This symbol indicates that the pilot is in Auto mode wherethe Pilot is in control of the vessel�s course, via a Compassor Navigator.
As soon as the key is pressed, the Pilot will power up
(turn on) in Standby mode.
There will be a delay of about 10 seconds while the Pilotcarries out a self test routine.
First the pilot displays all the elements of the LCD.Next the Information display shows:
C E T R E K Cetrek,
6 0 9 V * . * * Pilot Computer type (609 or 619) and Software Version,
S P O O L V A L This will only be displayed, when J3 (in the Pilot Computer) has been set to
solenoid (spool valve) control.
P I L O T * * * Pilot Control Type, �P I L O T 7 3 1 � or �P I L O T 7 4 1 � or ifa mixture of ProPilot heads �COMME RCL�.If 730/740 and ProPilot heads are mixed, �ERROR� willappear ( a 715 can be used as a second station on a ProPilotsystem and will operate as described in this Users Guide).
R A T E G Y R O This will only be displayed, when a Rate sensor is fitted tothe Pilot Computer.
T E S T I N G This is displayed during the rest of the test.
H E A D 1 2 3 The vessel's heading is displayed after successful testing.
G Y R O C A L This is displayed only if a 619 has a Gyro stepper selected.See section 8.28, page 59.
AUTO

1 1
1.5 Standby mode (Manual Control of the steering)
The Standby symbol is displayed to show that the Pilot is inStandby mode.
The large numbers in the centre of the LCD are showing thelive Heading. The Heading will change as you manually steer,just like a conventional compass.The Pilot is not in control of the vessel�s steering.
1.6 Jog Steer
When in Standby mode the Jog Steer function can be used.Pressing either the or key, moves the rudder inthat direction. The rudder stops moving when the key isreleased, it does not return to the midships position.
( - - - J O G To Jog Steer to Port, press the key.
J O G - - - ) To Jog Steer to Starboard, press the key.
The Jog Steer function will not operate in Auto mode orwhen settings are being altered.
1.7 Auto mode (with�COMPASS� heading control )
Press the key to switch the Pilot from Standby to Automode. The pilot is now controlling the vessels steering tomaintain its instructed course to steer.
Press the key at any time to revert to Standby modeand resume manual control.
The LCD display changes from showing the standby symbolto showing the Auto symbol. The large numbers show theCourse to Steer which is set by the compass or navigator, asindicated on the right of the LCD.
AUTO

ProPilots 731 and 741
1 2
1.8 Selecting how the Arrow Keys function
In Auto mode, each time the and keys are pressedat the same time, the Pilot cycles through the arrow keyfunctions.
D O D G E M D Dodge function (default setting).
C O U R S E 1 Course Change function ( 1º per press).When this is selected, a small �1� will blink in the Infoline heading display.
C O U R S E 1 0 Course Change function ( 10º per press).When this is selected, a small �10� will blink in the Infoline heading display
These functions only operate in Auto mode, but NOT whenan adjustable setting has been selected.
Dodge
When you are in Auto mode with the Dodge functionselected, pressing either the or key will move therudder in that direction. When the key is released, the Pilotwill return the vessel to its original course. This function isused to �Dodge� obstacles in the vessel�s path and return toa parallel track from your original.
( - - D 0 D G E Press the key and the display will indicate a Dodge toPort and the vessel will turn to Port.
D 0 D G E - - ) Press the key and the display will indicate a Dodge toStarboard and the vessel will turn to Starboard.
Dodge limits can be set to limit rudder movement whendodging. These should be set to prevent dangerous severecourse changes on faster boats, see section 8.11, page 52.
E
ED
+

1 3
Changing course
The Course Control knob allows course changes in 1ºincrements for fine tuning.
H e a d 1 5 0 To change course, in Auto mode, rotate the Course Controlknob until the large numbers on the LCD show the newcourse.
Alternatively, if the arrow key function is set to CourseChange, press the or keys, (one press represents 1ºor 10º depending which is selected). The Pilot willimmediately bring the vessel on to the new course.
For large course changes it might be safest to switch the Pilotback to Standby mode, steer to the new course manually,then switch back to Auto mode.
1.9 The Information display
The key steps through a list of Sea State settings andinformation items displayed in the Information area of theLCD. Items may be added or removed from the list,customising the pilot to suit your own requirements.
The default displayed settings that will show withoutadditional NMEA inputs are: Heading, (Pilot A,B,C, 619 only),Rudder Ratio, Response (Turn Rate, 619 only).
When showing adjustable items (like Rudder Ratio, Response)the or keys change the value of the setting.If no adjustment is made within 7 seconds, the informationdisplay will automatically revert to the live heading display,returning the and keys to their previous function.
Non adjustable items do not time-out after 7 seconds, anddo not change the function of the and keys.
1 5 6º

ProPilots 731 and 741
1 4
Customising the Information display List
The full list of items that can be displayed and their defaultstatus[ ] are:always available:
Live heading,[ON]Pilot A,B,C (619 only) [ON]
Rudder Ratio, [ON]Response, [ON]Counter rudder, [OFF]Turn Rate (619 only), [ON]
Trim, [OFF]Battery Voltage, [OFF].Digital Rudder angle, [OFF]
with suitable NMEA messages supplied:Waypoint Name, [OFF]XTE (Cross Track Error), [OFF]Bearing, [OFF]Distance, [OFF]Speed, [OFF]Depth, [OFF]SOG (Speed Over Ground), [OFF]COG (Course Over Ground), [OFF]Water Temperature. [OFF]
To change which items are displayed
Press and hold the key for three seconds to enter theInformation Menu.
The key now steps through all items in the menu,except Heading which cannot be turned off.
If there is an asterix � *� by the item it will be displayed.
Stop at the item you wish to change.Use the or key to: � turn the item on or off � change the units of the Depth and Temperature displays.
The value displayed is the one that the Pilot will use.
Despite being turned on, information requiring anNMEA message will only be displayed if the correctmessage is available to the autopilot.
Press and hold the key for three seconds to exit theInformation Menu.
Press and hold the key to save the settings (this alsoturns the Pilot OFF).
Connection details, and a list of NMEA sentences supported,are in the 930609/619 Pilot Computer Installation Guide.

1 5
1.10 Rudder Position Indicator
The LCD displays a bar graph of the rudder position, up to30º. The graph shows the rudder position in 5º steps frommidships.
Rudder midships 10º of rudder to port
In Auto mode, when the pilot is controlling ruddermovement, two black arrows are used to indicate steeringmotor activity. Both arrows are displayed when the rudder isnot active. One arrow indicates that the rudder is beingdriven in that direction.
Rudder amidships 10º of rudder to starboardrudder still moving to starboard.
Rudder Position Indicator
When the rudder has reached the autopilots Rudder Limit thesegments will flash.
1.11 Digital Rudder position display
This digital readout gives rudder position in 1º steps and canbe added to the displayed Information list, section 1.9, page14 explains how.
R U D ( 0 0 ) Rudder is at midships
R U D ( 0 5 Rudder is 5 degrees to Port.
R U D 3 7 ) Rudder is 37 degrees to Starboard.

ProPilots 731 and 741
1 6
1.12 Pilot A, B, C (619 only)
The Pilot will store 3 sets of Sea State and Configurationvalues, PILOT A set, PILOT B set and PILOT C set. Each set canbe tuned for a different speed or sea condition. Thehelmsman can then quickly switch between the settings ashe needs them.
These should have been set up during Installation and SeaTrials but you will need to know which Pilot set is for whichconditions. These can be adjusted when you become familiarwith the Pilot, to suit your needs. See section 8 �PilotConfiguration Reference�
Press the key until �PILOT ?� is displayed
Press the or key to change between sets.
The Information display reverts back to showing Live Headingif it has not received a key press for 7 seconds
1.13 Lighting
Simply press the key to change the brightness of the
LCD backlight.

1 7
2.2.2.2.2. Compass course controlCompass course controlCompass course controlCompass course controlCompass course controlTo engage Compass course controlIf �COMPASS� is displayed on the right of the LCD, simplypress the key to turn the Pilot to Auto mode. The Pilotwill take the live compass heading as its Course to steer, andhold the vessel on that heading.
If �NAV� is displayed, press the key repeatedly until theword �COMPASS� flashes. Press the key to select Automode under Compass control, otherwise the pilot will returnto its previous setting.
In an emergency, press and hold the /AUTO key toturn the pilot OFF and regain manual control.
To make small changes to the course heading, whilst still inAuto mode, turn the Course Control knob (or the or
keys if set to Course change). The Pilot will turn thevessel onto the new heading.
To make large course changes it may be safer to press the key to return the Pilot to Standby mode, steer the
vessel manually, then press the key again to engagethe Pilot and continue on your new heading.
Using two magnetic compass�
The ProPilot enables you to switch between two differentmagnetic compass�.
With the Pilot in Standby, press and hold the key toenter the Pilot Configuration settings.
Press the key repeatedly to step backwards round thecycle so that �c o m p a u t o�, � c o m p int� or �
c o mp ext� is displayed.
Press the or key to switch between the magneticcompass� connected to the system.
� compauto� looks for the 930580 compass at powerup, but if it is not available, automatically switches to theone connected to PL12 of the Pilot Computer. This is thepilots default setting.

ProPilots 731 and 741
1 8
� comp int� uses the systems 580 compass only.
� comp ext� uses a compass connected to PL12 of thePilot Computer only.
H E A D t 0 2 5 If an external compass is being used, when the info linedisplays the heading , the character after �HEAD� blinks itstop bar as a reminder.Press and hold the key again to exit the PilotConfiguration settings.
Compass Difference Alarm
If the system has a 580 compass connected, but the externalcompass is selected as the steering compass, the Pilotcomputer will monitor both headings.
The Off Course Alarm (OCA) value is then also used as theCompass Difference Alarm value.
When the pilot is in AUTO, if the 580 heading differs fromthe steering compass by greater than the OCA value, thealarm will show. The alarm shows �CDIFF+12� where�+12� is the value that the 580 differs from the steeringcompass. Values outside the range -45º to +45º aredisplayed as -45º or +45º.
The key cancels the alarm and also resets the currentdifference as zero. The alarm will then only trigger again ifthe current difference varies by more than the OCA value.

1 9
3.3.3.3.3. Gyro compass control Gyro compass control Gyro compass control Gyro compass control Gyro compass control (619 only)
If the a 619 system has been configured to start up using aStepper gyro, as soon as it finishes its start up routine it willask for the gyro calibration.
Simply rotate the Course Control knob until the LCD showsthe vessels heading, then press the and keyssimultaneously. The ProPilot will then be ready for use.
An HDT Gyro does not require calibrating.G Y R O T 0 2 5 When the info line displays the heading, the character after
�GYRO� blinks its top bar to indicate a HDT type gyro isselected.
Switching between a Magnetic Compass anda Gyro Compass.
With the pilot in standby, press and hold the key toenter the Pilot Configuration settings.
Press the key repeatedly to step backwards round thecycle so that �G Y R O � or � M A G n e t i c� is displayed.
Press the and keys simultaneously to switchbetween the systems magnetic compass and its Gyrocompass.
If the system has been set for a Stepper gyro, it will need tobe calibrated every time the gyro is selected.
G Y R O C A L Press the key twice so that GYRO CAL is showing. Pressthe and keys simultaneously and the headingnumbers on the LCD will flash.Press the and keys or rotate the Course Selectorknob until the LCD displays the ships heading, then press the
and keys simultaneously.Press and hold the key again to exit the PilotConfiguration settings.

ProPilots 731 and 741
2 0
Compass Difference Alarm
If the system has a 580 compass connected, but a gyrocompass is selected as the steering compass, the 619 willmonitor both headings.
The Off Course Alarm (OCA) value is then also used as theCompass Difference Alarm value.
When the pilot is in AUTO, if the 580 heading differs fromthe gyro compass by greater than the OCA value, the alarmwill show. The alarm shows �CDIFF+12� where �+12�is the value that the 580 differs from the steering compass.Values outside the range -45º to +45º are displayed as -45ºor +45º.
The key cancels the alarm and resets the currentdifference as zero. The alarm will then only trigger again ifthe current difference varies by more than the OCA value.

2 1
4.4.4.4.4. Navigator course controlNavigator course controlNavigator course controlNavigator course controlNavigator course control
The Pilot can be interfaced to a navigation device such as aGPS, Loran or Plotter using the Industry Standard NMEA0183 format.
Once a waypoint has been selected as a target and thenavigation device is providing the Pilot with navigation datato the target, the Pilot may be engaged under Navigatorcourse control.
Steer the boat onto the desired heading to minimise anyCross Track Error so that Auto mode can be engaged.
As soon as Navigator course control is selected the Pilot willread the magnetic bearing to the target from the navigatorand use this as the course to steer. Selecting Auto mode willthen cause the Pilot to turn the vessel onto that course andhold it.
The Pilot constantly monitors the Cross Track Error signalfrom the navigator and applies Navigator Gain to maintain adirect Course Over Ground to the target.
Note that the vessel may establish a �crab� angle tocompensate for wind and tide as it steers to the waypoint.
Navigator Control

ProPilots 731 and 741
2 2
If a new waypoint is selected in the navigator, manually orbecause it is in a route, the Pilot will be triggered, by achange of waypoint identifier, to accept a new course tosteer.
The Pilot will then automatically turn to the new course, or
wait until the key is pressed before it turns, depending
whether the automatic or manual option has been set. Seesection 8.20, page 56 for setting instructions.
While under Navigator Control, both the arrow keys andCourse control knob still operate.
4.1 NMEA 0183 messages
The Pilot Computer is capable of processing the followingNMEA 0183 messages for navigation (it will also processother messages for instrumentation, see the Pilot ComputerInstallation Guide for details). Cross Track Error, Bearing toWaypoint and Waypoint identifier are required as aminimum.
NMEA CROSS TRACK BEARING TO WAYPOINT VELOCITYMESSAGE ERROR WAYPOINT IDENTIFIERAPB/APA ü ü ü -BOD - ü ü -BWC - ü ü -XTE ü - - -RMA - - - üRMB ü ü ü -RMC - - - üVTG - - - üVHW - - - ü
ü indicates that the data should be present in the givenmessage according to the NMEA 0183 specification, howeverplease note that not all manufacturers provide all the datarequired by a given message.
Providing the navigator outputs the minimum information,automatic waypoint sequence can be used.

2 3
4.2 Using Navigator control
Programme the navigator with a waypoint or route, andselect the target. The basic information used for Pilot controlis:-
� Bearing to Next Waypoint.
� Cross Track Error: Whether you are port or starboard ofthe course and by how much, expressed in units ofone hundredth of a nautical mile (60ft).
� Alarm Condition: This indicates if information receivedfrom the navigator is valid or not.
� Change of Waypoint Identifier.
If you do not want Automatic Waypoint switching, change toManual Waypoint switching, see section 8.20, page 56.
4.3 Selecting a Navigator
If �NAV� is not displayed on the right of the LCD, press the key repeatedly until the word �NAV� flashes. The
option �NAV1� is shown in the Information display.
N A V 1 This selects the navigator connected to NMEA 1 in the PilotComputer (PL11).
If the system has a 930619 Pilot Computer, additionalnavigators can be connected. Press the key to selectthe navigator connected to:
N A V 2 NMEA 2 in the Pilot Computer (PL17).
N A V 3 NMEA 3 in the Pilot Computer (PL16).
4.4 To engage Navigator control
While NAV is flashing, press the key to engage Automode under navigator control, otherwise the pilot will returnto its previous setting.
If the Bearing to Waypoint is within 20º of your heading andthere is less than 0.05 nautical miles Cross Track Error, thePilot will immediately engage Auto mode under Navigatorcourse control.

ProPilots 731 and 741
2 4
Bearing and Cross Track Error can be turned on to be viewedin the Information display.
The Pilot will not engage Navigator Control immediately ifthe Bearing to Waypoint is greater than 20º of your heading(more than 0.05 nautical miles Cross Track Error) as thiswould cause a sharp turn.
B W P 1 4 5 In this instance, the press of the key displays the BWP(Bearing to Waypoint).
The next press of the key displays the XTE (Cross TrackError).
X T E ( 0 . 1 4 The number displayed is the cross track error in onehundredth�s of a mile. The arrow indicates if the error is toPort or Starboard. This example shows 0.14 miles Port of thetrack.
X T E 0 . 0 2 ) This example shows 0.02 miles Starboard of the track.
X T E 0 0 0 This example shows that the pilot is on track.
The third press of the key will engage the autopilotand is likely to cause a sharp turn.
So if the Bearing to waypoint is greater than 20º from yourheading, or the XTE is greater than 0.05, it would be safer tomanually steer closer to the course. Once the Bearing to NextWaypoint and Cross Track Error are at acceptable values pressthe key to engage Navigator control.
Once the Pilot reaches the waypoint, the Navigator will sendit a new Course to steer.
If Automatic Waypoint Sequence is selected, the Pilot willflash the bearing to next waypoint, for 7 seconds, but turnonto it automatically after the first 2 seconds.
If Manual Waypoint Acceptance is selected, the Pilot willscroll the message �N E W W P T P R E S S A U T O � for 10seconds. The vessel will not turn onto the new course unlessthe key is pressed.
If the key has NOT been pressed, after 10seconds the Pilot will switch to Compass controland continue on its present heading until Nav isre-selected or new instructions are received.

2 5
4.5 Navigator errors
N O N A V If the Pilot is not receiving navigator data, this message willappear. Navigator control cannot be selected. Check thecable, connections and message format.
N O X T E This indicates that no Cross Track Error information is beingreceived from the Navigator.In the event of a navigator error or fault condition, the Pilotwill display a fault message, hold the vessel on its presentheading and will not accept any further course changes fromthe Navigator until the error clears.
If the alarm clears, the Pilot will accept data again andNavigator control can resume. If the fault condition remains,turn back to Compass control, or manually steer the vessel.
N A V G E R R If the Pilot receives an error message from the navigatorwhen Auto mode is selected it will display this message andremain in Standby mode.
An explaination of navigator alarms is given in section 9,page 62.

ProPilots 731 and 741
2 6
5.5.5.5.5. Sea State AdjustmentsSea State AdjustmentsSea State AdjustmentsSea State AdjustmentsSea State Adjustments5.1 Rudder ratio
The Rudder ratio setting is used primarily to match ruddermovement to boat speed. Generally the higher the speed theless movement is required, the lower the setting needs to be.
If the setting is too low the vessel will understeer and tend todrift off course to one side.
If the setting is too high the vessel will oversteer and build uposcillations from side to side.
If NMEA Speed information is connected to the PilotComputer, the Pilot can be configured to automaticallyadjust the Rudder ratio setting in relation to the vessel�sspeed, see section 8..8, page 51.
To manually adjust the Rudder ratio setting, press the key repeatedly until �RUDDER� is displayed.Adjust the setting using the or keys.
The range is from 0 (Minimum movement) to 20 (Maximummovement).
The Information display reverts back to showing Live Headingif it has not received a key press for 7 seconds
5.2 Response (also known as Yaw).
The Response setting is primarily the autopilot�s �weather�control. It sets the amount that the vessel is permitted tomove off course before rudder is applied to bring it backonto its set heading.
Response needs to open (increase the setting value) in heavyseas and close (decrease the setting value) in calm seas.
This can usually be set to Adaptive and the Pilot Computerwill adjust this automatically.

2 7
Adaptive control
The Pilot�s �Adaptive� software has been designed tooptimise Response, Counter Rudder and Trim in order toobtain the best performance, as conditions change.
With Response set to Adaptive (RESP A2) the Pilotautomatically fine tunes the controlled rudder movements toroughly the same frequency and magnitude as thoseperformed by hand when steering manually. The value willchange between A1 (calm sea) and A5 (rough sea) as itadjusts itself.
When sea states or conditions obviously change, forinstance, after turning to a new course from a following seato a head sea, the Adaptive Software adjusts to suit thechange in conditions.
Proper setting has a marked effect on steering system wearand tear.
Manual control
To manually adjust the Response setting, press the keyrepeatedly until �Resp � is displayed.
Adjust using the or keys. �Adaptive � control can stillbe turned on and off from here.
The range of settings is: Adaptive (A0 to A5) then from 1(Very responsive) to 20 (Least responsive).To avoid incorrect setting; Planing boat types are limited to a maximum setting of 2, Semi-displacement boat types to a maximum of 5, Displacement boat types to 20.
Adaptive is the default setting.
If the response setting is too high, the vessel moves a longway from the course before it is corrected. You will need todecrease the Response setting to correct this.
If the response setting is too low, the vessel will hold itscourse but the helm will be constantly and rapidly moving,making small unnecessary corrections.

ProPilots 731 and 741
2 8
Increase the Response setting to correct this. This conditioncauses the most wear in the steering gear and is wasteful ofpower.
The Information display reverts back to showing Live Headingif it has not received a key press for 7 seconds.
Proper setting has a marked effect on steering system wearand tear.
5.3 Turn Rate (619 Pilot Computers only)
T U R N R 1 6 This sets the minimum radius of turn that is allowed whenunder Pilot control. When set to 0 (off) the rate of turn isnot limited and small radius turns are allowed.The range is from 0 (off), then 1 (large radius turns only) to20 (small radius turns allowed).
Press the key repeatedly until �TURNR� is displayed.
Adjust the value using the or keys.
The Information display reverts back to showing Live Headingif it has not received a key press for 7 seconds

2 9
The next sections relate to:
� the installation of theautopilot system
� pilot settings referenceguide
� fault finding

ProPilots 731 and 741
3 0
Basic Equipment
� Pilot Control 930731 and/or 930741
� Pilot Computer 930609 or 930619
� 930580 Compass Sensor
� 930809 or 930819 Rudder Feedback Unit
� Drive Unit for the steering
� Heavy Duty Power Supply, fused to suit drive unit
� Light Duty Power Supply, fused at 5 Amp
A Basic System

3 1
6.6.6.6.6. Installing the PilotInstalling the PilotInstalling the PilotInstalling the PilotInstalling the Pilot
It is important to read the Manual / Installation Leaflet foreach unit prior to commencing installation.
1. Refer to the 930609/619 Pilot Computer InstallationGuide for:� A step by step installation procedure for connecting
the Pilot 731 and 741 system into the Pilot Computer.
� Connecting Cetrek peripheral equipment.
� Setting the Jumpers and Links.
2. To install the Pilot Control head itself, refer to section6.2 of this manual.
3. Once the system�s mechanical installation is complete,carry out:� Dockside Settings (section 7, steps 1 - 6), and
� Sea Trials (section 7, steps 7 - 10) to configure thepilot to the vessel.
� Pilot Configuration (section 8) explains the Pilot andperipheral equipment settings for the system.
6.1 Specifications
General
Voltage: Nominal 12V / 24V DC
Operating Temperature: 0º to +55ºCStorage Temperature: -20º to +70ºC
Pilot 731 Cable (510529): 6 way x 6m (19.5�) Screened
Dimensions: 110 mm (4.3�) x 110 mm (4.3�)
Enclosure: Weatherproof.
Pilot 741 Cable (510529): 6 way x 6m (19.5�) Screened
Dimensions: 110 mm (4.3�) x 200 mm (7.8�)
Enclosure: Weatherproof.

ProPilots 731 and 741
3 2
Not toScale
6.2 Mounting the Autopilot Control
For the sake of safety, there must be an autopilot controlwithin reach of the Helmsman AT ALL TIMES, to enable quickdisengagement of the Pilot.
An extra long cable, 15m (49ft), is available, part number510548 to replace the supplied 6M (19.5�) if required.
Pilot 731
A Trunnion Mounting kit is supplied.
To bulkhead mount: Use the template to cut the holes in thebulkhead for the cable and 4 studs.
Ideally, if the rear of the 731 is going into an enclosed area,that area should be adequately ventilated so that the rearsees the same ambient temperature as the front.
Pass the cable out through the bulkhead and connect it tothe rear of the Pilot 731. Screw the M4 studs into the rearcase. Place the pilot in position, then secure it to thebulkhead with the thumbnuts supplied.
Allow adequate clearance for cable connections toensure cables are not unduly stressed and that thereis sufficient length of cable to remove the unit forservice purposes.

3 3
Pilot 741
A Trunnion Mounting kit is supplied.
To bulkhead mount: Use the template to cut the holes in thebulkhead for the cable and 4 studs.
Pass the cable out through the bulkhead and connect it tothe rear of the Pilot 741. Screw the M4 studs into the rearcase. Place the pilot in position, then secure it to thebulkhead with the thumbnuts supplied.
Allow adequate clearance for cable connections toensure cables are not unduly stressed and that thereis sufficient length of cable to remove the unit forservice purposes.
Not to Scale

ProPilots 731 and 741
3 4
Remove theplug fromthe firstcable.
Then connectthe wires ofboth units intothe plug of thesecond cable.The wires arethe samecolours.
Insert the plug into PL10.
BlackOrangeYellow
RedViolet
Brown
PL10GNDTX dataTX LatchLDSS+RX dataTX clock
654321
Connect the cable screento the fixing �tongue�.
6.3 Connecting the Pilot Control
Route the cable to the Pilot Computer. If the cable needs topass through a bulkhead, note the wire colours in theconnector, then remove it temporarily.
Incorrect wiring (e.g. reverse polarity) can causeirreparable damage to some equipment and is notcovered by Cetrek warranty.
Insert the connector into the Pilot Computer (PL10). Connectthe cable screen securely to the fixing �tongue� using the twocable ties provided.
When connecting two or more ProPilots, the wires must beconnected in parallel, into the same connector, thenplugged into PL10.
H E A D
H E A D
H E A D

3 5
7.7.7.7.7. Dockside and Sea trial settingsDockside and Sea trial settingsDockside and Sea trial settingsDockside and Sea trial settingsDockside and Sea trial settings
Having completed the mechanical installation and wiring ofthe system, the next step is to configure the Pilot for thecharacteristics of the boat.
In order to use the pilot successfully, it is MANDATORY thatyou carry out the Boat Type and the Rudder Settings Routine.For the system to work correctly, both Dockside settings andSea trials, need to be completed fully.
The method below is used during Dockside settings and Seatrials.
From standby, press and hold the and keys until�D O C K S I D E - [ ( ] / S E A T R I A L - [ ) ] � isdisplayed.
Press the key to select the Dockside settings menu.
Press the key to select the Sea Trial settings menu.
Using the settings menus
The settings use self prompting, scrolling messages, givingdetails on how to change the setting or to skip to the nextoption:
S E T B O A T T Y P E / T O C H A N G E - [ ) ] / S K I P - [ M O D E ]
The setting To change the setting To skip to the next press this key. setting, press this key
Do not engage Auto mode until the Dockside Settings havebeen completed.
To exit, at any time, press and hold the and keys.
To save any changed settings, turn the Pilot OFF by pressingand holding the key.
There are two summary cards supplied for these settings. Itmay be more convenient to use them after having read thisUser�s Guide.

ProPilots 731 and 741
3 6
Dockside SettingsDockside SettingsDockside SettingsDockside SettingsDockside Settings
Summary of steps:1 Powering up for the first time.2 Setting the Rudder Feedback type.3 Setting boat type.4 Rudder settings routine.5 Aligning the compass.6 Checking the settings.
7.1 Powering up for the first time
Ensure that all units are installed correctly, that the correctsize fuses or circuit breakers are fitted and that the ship�sbatteries are adequately charged. Check that all the systemconnections are correctly made and return the rudder to themidships position before the power is applied.
Switch the Pilot system supply ON (both Heavy Duty andLight Duty Supplies).
If the pilot starts to move the rudder, switch off atonce and re-check the connections.
Press the key. If all is correct the Pilot displays a startupsequence (fully explained on page 10) finishing with
H E A D * * * a heading display, which may not be accurate at this stage.
The Info line will display �ERROR� if a 730/740 Pilot and aProPilot are connected on the same system.
F A U L T 1 6 5 A 619 system with Gyro and no magnetic compass will give afault 165 (no compass) message when first powered up.Refer to section 8, page 46 and set the gyro settings, 8.27 to8.30, then restart the unit.
7.2 Setting the Rudder Feedback type.
The system comes from the factory set to amplified for the930809 or 930819 Rudder feedback unit (RFU). If anotherRFU is to be used, please refer to sections 8.0, page 46 and8.12, page 53 if you need to change the signal amplification.
Step 2
Step 1

3 7
With the amplification correct, set the rudder to midships, ifthe Rudder Position display is 5 degrees or less, it will becorrected during the rudder settings routine. If over 5degrees, mechanically re-adjust the Rudder feedback unit(refer to its Installation Instructions).
Depending on how the Rudder Feedback Unit is mounted,the direction of the pilot�s rudder information may bereversed, this will be automatically corrected later.
7.3 Setting the Boat Type.
With the pilot in standby, press and hold the and keys until �D O C K S I D E - [ ( ] / S E A T R I A L - [ ) ] � isdisplayed. Press the key to select the Dockside settingsmenu, the display scrolls the message �SET BOAT
T Y P E / T O C H A N G E - [ ) ] / S K I P - [ M O D E ] �.
In the Autopilot�s memory there are 3 boat types to choosefrom. Press the key to display the current Boat Type andthen press the key repeatedly to scroll through the boattypes, the setting left displayed will be the one used.
P L A N I N G PLANING hull (typically power boats, 20+ knots)
D I S P L A C E DISPLACEMENT hull (typically up to 10 knots)
S E M I D I S P SEMI-DISPLACEMENT hull (typically 10 to 20 knots)
The Boat type selected restricts pilot settings as below:
Setting Response TrimPlaning 2 max 10 maxDisplacement 20 max 10 maxSemi-displacement 5 max 10 max
Step 3

ProPilots 731 and 741
3 8
7.4 Rudder settings routine
Press the key, the display shows �RUDDERS E T T I N G S - [ ) ] / S K I P - [ M O D E ] � .During the Rudder settings routine the rudder willbe moved under autopilot control. It is thereforeimportant to ensure the rudder and steering gearcan move safely from hardover to hardover withouthitting anything. Check that the steering movesfreely from lock to lock without undue stiffness andthat it can move to its full travel without the RudderFeedback arm fouling the steering.
The Rudder settings routine will set:-
� Rudder Phasing sets the rudder signal polarity so thatthe Pilot displays the correct direction of ruddermovement.
� Motor Phasing sets the correct direction of ruddermovement when commanded by the autopilot.
� Rudder Limits sets the maximum rudder movement,either side of midships, useable under autopilot control.
� Center Rudder sets the rudders midships position.
Press the key to start the Rudder settings routine.
First the Pilot scrolls the message �CENT ER THE
R U D D E R - [ ) ] . Position the rudder at midships byviewing the actual rudder, then press the key.
The display will now scroll �R U D D E R TO
S T A R B O A R D E N D S T O P - [ ) ] �. Turn the helm tostarboard, to a position just before the mechanical end stopand with it held in this position press the key again.
A default value of 30º appears in the Heading Display andthe Information line scrolls �E N T E R T H I S R U D D E R
A N G L E - [ ( ) ] / S K I P - [ M O D E ] �. Using theRudder Angle Template on page 65 estimate the currentangle of the vessel�s rudder just before the mechanical end
stop. Use the and keys to alter the default value tothe estimated angle. Press the key to enter thisinformation.
Step 4

3 9
The display scrolls �R U D D E R T O P O R T E N D
STOP-[)]�. Turn the helm to port, to a position justbefore the mechanical end stop and with it held in this
position, press the key again.
To prevent possible damage to your steering gear; ifthe Port and Starboard positions that you selectwere different angles the Pilot will set both RudderLimits to the smaller angle.
Now the Pilot asks you to �C E N T E R T H E R U D D E R -
[)]�, centre the rudder again by viewing the actual rudder
and with it held in this position, press the key.
The display scrolls �N O W P R E S S A U T O - [ A U T O ] �.Ensure the rudder is free to move, press the key, whichengages the motor and drives the rudder from hard over tohard over four times:
H - O V E R 1 from the centre rudder position to a Rudder Limit
H - O V E R 2 then across to the other Rudder Limit
H - O V E R 3 the rudder is returned to first Rudder Limit
C E N T E R I N G and finally the rudder is centred again
�R U D D E R I S N O W S E T - [ M O D E ] � is displayedto confirm that the Rudder Phasing, Motor Phasing, RudderLimits and Center Rudder settings have all been completedsuccessfully.
7.5 Align Compass
Not all compass� support this feature. The 930580 and930687 do. For other compass� see the documentation thatcomes with them.
Press the key, the display will show �ALIGNC O M P A S S - [ ( ) ] / S K I P - [ M O D E ] � .
Using the and keys or Course control knob, set theheading display of the LCD to the vessel's approximateheading (this is set more accurately during the Sea Trials).
Step 5

ProPilots 731 and 741
4 0
Press the key, �D O C K S I D E S E T T I N G S
C O M P L E T E [ M O D E ] � will be displayed.
Press the key to exit the Dockside Settings menu.
Save the settings by holding down the key to turn thePilot OFF.
The Dockside settings are now complete.
7.6 Checking the settings
Press the key to turn the pilot back on.
Check that there are no bars present in the Rudder PositionIndicator when the rudder is in the midships position.
Turn the helm to Starboard until the rudder position scaleflashes. Check that the rudder has not quite reached themechanical limit of rudder movement.
Repeat for Port helm.
Re-centre the rudder. Switch the Pilot into Auto mode, bypressing the key. Very little or no rudder movementshould occur.
If the rudder drives continuously to one side, switchoff the power at the breaker at once. Check themechanical and electrical installation. There is aTroubleshooting Guide in the 930609/619Installation Guide which may help.
If the rudder continuously �hunts� about midships, turn thePilot off and remove as much freeplay as possible from thesteering and Rudder feedback unit linkage. This also occurson Power Steering systems particularly if the steering isplumbed with flexible hose. If that does not stop it, increasethe Rudder Deadband setting, see section 8.9, page 52.
With the pilot in Auto mode, check that when you press andhold the key, the motor drives the rudder so that itsclose too but doesn�t touch the Starboard end stop. Checkthat the rudder display segments flash. The rudder shouldcentre when the key is released.
Step 6

4 1
Press and hold the key, and repeat for Port rudder.
Hardover times can now be checked. Refer to sections8.6 Motor speed and 8.7 Motor ramp, to set DC reversingmotors.
Press the key to return to Standby mode.
Save any changed settings by holding down the key toturn the Pilot OFF.
You are now ready to start the Sea Trials.

ProPilots 731 and 741
4 2
Sea Trials Sea Trials Sea Trials Sea Trials Sea Trials
The next stage of installation is to set-up the Pilot at sea.
It is essential that your compass is properlycorrected.
Summary of Steps7 Automatic deviation correction of Cetrek compass�.8 Compass alignment for Cetrek compass�.9 Center the rudder
10 Final Sea trial and fine tuning
Steps 7 & 8 below correct the Cetrek compass� 580 and 687.For other compass� or Gyros, follow the documentation thatcomes with them then carry out steps 9 and 10.
To access the Sea Trials menu, with the pilot in standby, pressand hold the and keys simultaneously, then pressthe key.
Press the key to step through the settings.To exit, at any time, press and hold the and keys.To save any change settings, press and hold the keywhich also turns the Pilot off.
7.7 Automatic Compass DeviationCorrection for 930580 and 930687 compass�.
The 930580 and 930687 compass have facilities toautomatically measure and compensate for the majority ofcompass deviation found on board a vessel. The compasssensor must be mounted clear of strong magnetic fields,caused by heavy duty cables, motors, speakers etc.
Before continuing, ensure you have a method of obtainingan accurate heading, i.e. GPS, transits or a correctedmagnetic compass.
This must be performed in a calm sea, away fromlarge iron structures.It is dangerous to carry out these trials in restrictedor busy waters.
Step 7

4 3
Turn the vessel through a full 360º with the Pilot in Standbymode and note the amount of error at the eight Cardinal andIntercardinal points.
The deviation correction requires the vessel to turnCLOCKWISE approximately 2½ times, in a smooth turn.
Turn the system on. In Standby mode, press and hold the and keys until
�D O C K S I D E - [ ( ] / S E A T R I A L - [ ) ] � isdisplayed. Press the key to select the Sea Trial settings.
The Pilot will now display�C O M P A S S CO R R E C T I O N - [ ) ] / S K I P - [ M O D E ] �.
Press the key�C O M P A S S U N CO R R E C T E D C A L I B R A T E
N O W - [ ) ] / S K I P - [ M O D E ] � is displayed.
Begin your turn, then press the key to start thesequence running, the Pilot displays �TURNBOAT�.
The display then shows � K E E P T U R N I N G �.
After approximately 2½ turns the display shows�C O M P A S S C O R R E C T E D - C A L I B R A T E N O W -
[ ) ] / S K I P [ M O D E ] �, the automatic deviationcorrection routine has been completed.
If the pilot displays �C O M P A S S C O R R E C T E D -
C A L I B R A T E N O W - [ ) ] / S K I P [ M O D E ] � itmeans that the autopilot already has correction valuesstored. Press the key to erase previous information and�C O M P A S S U N CO R R E C T E D - C A L I B R A T E
N O W - [ ) ] / S K I P - [ M O D E ] � is displayed.
If �ERROR 7� or �8� is displayed, the compass has astrong magnetic field too close to it. Remove the source orrelocate the compass to a more suitable position.
To abort the routine, press the and keys together.The display returns to �CO M P A S S U N CO R R E C T E D -
C A L I B R A T E N O W - [ ) ] / S K I P - [ M O D E ] �.Turn the Pilot off by pressing the key.
The Pilot must have been turned off before the start of everydeviation correction run.

ProPilots 731 and 741
4 4
Step 8
Step 9
7.8 Compass alignment (Cetrek compass�)
Having completed the Automatic deviation correctionprocedure the compass must be �electronically� aligned withthe vessel�s bow.
Press the key �A L I G N C O M P A S S - [ ) ] /
S K I P - [ M O D E ] � is displayed. Hold the vessel on asteady heading. The compass heading is displayed. Using the
or keys, or the Course control knob, change thevalue until it is the same as the vessel�s true heading. Whencorrect, press the key.
Checking the compass settings
Comparison checks against known headings should becarried out to verify the accuracy of the compass.
Turn the vessel again through a full 360º with the Pilot inStandby mode. The live heading is displayed in largernumbers in the Heading display, note the amount of error atthe eight Cardinal and Intercardinal points. The error shouldnow have reduced to less than +/- 3º at each point.
If this accuracy cannot be achieved, the compass willprobably need to be moved and corrected again.
If two compass� have been fitted, both will needselecting, then calibrating and aligning, seperately.
7.9 Center Rudder
Press the key until �C E N T E R R U D D E R - [ ) ] /
S K I P - M O D E ] � is displayed.
This routine will set the electronic center rudder positionmore accurately than that set in the dockside settings.
Steer the vessel on a straight heading, at normal cruisingspeed (ensure that there is no cross wind or similar requiringStanding Helm). Press the key to set the current rudderposition as the new midships position.

4 5
The message �C E N T E R R U D D E R - [ ) ] / S K I P -
MODE]� is displayed to allow the setting to be done againif needed.If the position is correct, press the key and the Pilot willexit the Sea trial settings mode.
7.10 Final Sea Trial and Fine Tuning
Steer the vessel in a straight line at normal cruising speedand press the key.The vessel should now hold a steady course.
If the vessel does not hold a steady course, change the SeaState adjustment Rudder Ratio to set the pilot for optimumperformance, as you would on any voyage (see section 5,page 26).
If the vessel drifts off course to one side, increase the rudderratio setting by one.
If the vessel oscillates from side to side, decrease the rudderratio setting by one.
Change it one step at a time.
Press the key repeatedly until �RuddeR� is displayedfor Rudder Ratio and change the setting by using the or keys.
Press the key to regain Manual Control.
Check and readjust the motor speed (section 8.6) and motorramp (section 8.7) if necessary.
Set sensible Dodge limits if they are needed, see section 8.11on page 52.
619 only, set Pilot B and C values, although they may need towait for different sea states to fully check them.
The Pilot installation is now complete.
Save any changed settings by holding down the key toturn the Pilot OFF.
Step 10

ProPilots 731 and 741
4 6
8. Pilot configuration reference
This section contains details of all the Pilot configurationsettings. Those that might need frequent adjustment can beadded to the INFO list. The rest might be needed to fine tunethe Pilot for an unusual vessel, or for setting peripheralequipment options.
To access the Pilot Configuration menu, from Standby mode,press and hold the key until�C H A N G E S E T T I N G - [ ( ) ] / F O R W A R D -
[ M O D E ] / B A C K W A R D - [ I N F O ] � is displayed.
Pressing the key steps forwards through the list of settings.Pressing the key steps back through the list of settings.
Pressing and holding the key now exits the menu. Itthen re-enters at the last viewed setting.
To save changed settings, turn the Pilot OFF by pressing andholding the key.
8.1 Rudder ratio
R U D D E R 5 The Rudder ratio setting is usually altered from theinformation display, see section 5, page 26. This is analternative place to change the value.Press the key, "RUDDER" is displayed.Change the setting by using the or keys.
The range is from 0 (Minimum movement) to 20 (Maximummovement).
8.2 Response
R E S P A 2 The Response setting is usually set to Adaptive or alteredfrom the Information display, see section 5, page 26. This isan alternative place to change the value.Response sets the amount that the vessel is permitted tomove off course before rudder is applied to bring it backonto its set heading.

4 7
Press the key, �RESP � is displayed. Change thesetting by using the or keys.
The range of settings is:Adaptive (A1 to A5) then from 1(Very responsive) to 20 (Least responsive). Planing boat types are limited to a maximum setting of 2,Semi-displacement boat types to a maximum of 5 andDisplacement boat types to 20.
8.3 Counter Rudder
C - r U D 8 To prevent the vessel from overshooting at the end of a largecourse change, the amount of applied rudder is reduced asthe vessel approaches the new heading.If the vessel is turning fast, the applied rudder needs to bereduced earlier than if the vessel was turning slowly.
This setting balances the rate that the vessel is turningagainst the rate at which the reduction of applied rudderoccurs.
If this is set too high the vessel will not settle on to the newheading quickly enough.
If the Counter Rudder is set too low the vessel will overshootand the pilot will have to correct with opposite helmaccordingly, possibly causing the vessel to oscillate from sideto side, before settling to the new heading.
Press the key "C-RUD " is displayed.Change the setting by using the or keys.
The range is from 0 (No Counter Rudder) to 20 (MaximumCounter Rudder).
This setting can be turned on, then viewed and adjusted in theInfo list.

ProPilots 731 and 741
4 8
8.4 Turn Rate (619 Pilot Computers only)
T U R N R 1 6 This sets the minimum radius of turn that is allowed whenunder Pilot control. When set to 0 (off) the rate of turn isnot limited and small radius turns are allowed.The range is from 0 (off), then 1 (large radius turns only) to20 (small radius turns allowed).
This setting can be viewed and adjusted in the Info list.
8.5 Trim
T R I M 4 Normally, if the rudder is amidships the vessel will travel in astraight line. Sometimes something will cause the vessel todrag to one side, for example the wind, towing something orcurrent. To counteract this, a few degrees of rudder will beapplied, this is termed Trim or Standing Helm.This setting adjusts the rate at which that standing helm isapplied.
The higher the setting, the faster the standing helm isapplied. This should be set so that the Pilot will trim thevessel within 60 seconds. On single screwed vessel's it is onlypossible to check the Trim setting while using the craft when,for example, the prevailing conditions cause the vessel tosteer with offset rudder. The correct Trim adjustment settingfor these types of vessel is therefore best found byexperience.
To check the Trim adjustment with twin engine vessel's, runthe boat under Pilot command with both engines running,then close down one engine. The vessel will initially go offcourse but should return to course in less than 60 seconds. Ifthe vessel takes a longer period of time to return to coursethen increase the value set for Trim.
Press the key, "TRIM" is displayed.Change the setting by using the or keys.
The range is from 0 (No Trim) to 10 (Maximum Trim) .
This setting can be turned on, then viewed and adjusted in theInfo list.

4 9
8.6 Motor Speed(DC reversing motors only)
M O T S P 1 0 0 Motor Speed limits the drive motor speed to give ahard-over to hard-over time suitable for the vessel. This isespecially useful if the vessel has a high steering inertia.
PWM (Pulse Width Modulation) is the method used tocontrol the speed of the motor.
The Motor Speed setting starts at 100%, which is themaximum motor speed the drive unit can provide. Press the
key to reduce the speed (increasing the Hard-overtime), to achieve the Hard-over to Hard-over time calculatedfor your vessel.Hard-over time is double at 50% power.
As a guide, the Hard-over to Hard-over time should beapproximately:
Planing vessel's 8 - 12 secondsSemi-Displacement vessel's 11 - 16 secondsDisplacement 15 - 18 seconds
Press the key, "M O T S P " or �P W M 0 F F � isdisplayed. Change the setting by using the or keys.
The range is from PWM OFF, then 100% to 50% inincrements of 5%.
The default is 100%.
P W M O F F There are a few conditions when PWM is a disadvantage,such as running down wind with a large following sea. Toswitch PWM off, press the key until �PWM 0FF� isdisplayed.
PWM is automatically turned off when J3 in the PilotComputer is set for spool valve operation.

ProPilots 731 and 741
5 0
8.7 Motor Ramp(DC reversing motors only)
M O T R A M P 2 This setting is to achieve a smooth acceleration anddeceleration in motor speed as it moves the rudder .
Planing vessel's are sensitive to sea conditions and can easilybe moved off course. Decrease the Motor Ramp value so thatthe rudder moves quicker, returning the vessel back onto itscourse faster.
Mechanical drive systems with high inertia, need to operatethe rudder more slowly when small adjustments are needed,increasing the Motor ramp value will provide this effect.
Press the key, "MO T RA M P - " is displayed.Change the setting by using the or keys.
The range is from 0º to 7º, in increments of 1º.
The default setting is 2.

5 1
8.8 Transition Speed (for Rudder Ratio)
N O T R S P D The Transition Speed setting indicates to the Pilot when toincrease rudder ratio, to give you greater rudder movementfor manoeuvring at slower speeds. As your speed changes,the software creates a gradual adjustment of Rudder ratio,instead of using the fixed Rudder ratio value. This obviouslyrequires NMEA speed information to be available to the PilotComputer.
This setting is most beneficial for planing vessel's which needincreasing rudder movement to maintain steering controlwhen not on the plane.
Establish at what point, in knots, your vessel is comfortablyon the plane. Enter the Pilot Configuration menu and usethe key to increase the Transition Speed setting to thisvalue.
Above this value the Pilot will use the Rudder ratio setting.Below it, the amount of Rudder ratio is gradually increased,up to double, giving more control at slower speeds.
Press the key, "NO TRSPD" is displayed. Change thesetting by using the or keys.
The range is from NO TRSPD (no transition speed) to 50knots in increments of 1 knot.
If there is no speed data available, set this to NO TRSPD.
The Pilot can use speed data from an NMEA 0183 speed orvelocity message, refer to the 930609/619 Pilot ComputerInstallation Guide for more details.

ProPilots 731 and 741
5 2
8.9 Rudder Deadband
R D B N D 3 Some steering systems have slack in them, owing to wear orsystem design, which gives a few uncontrolled degrees ofrudder movement. Hydraulic drive and power steeringsystems often have some overshoot.
To stop the Pilot trying to correct these small movementswhich it can never do, the rudder deadband setting allows asmall course error movement without the pilot applyingrudder.
Press the key, �RDBND� is displayed. Use the or keys to set this to the minimum value that avoids
hunting of the rudder. The range is from 0 (0º) to 20 (2º).
Too much slack in the steering system will affectPilot performance.
8.10 Rudder Limits
R U D L I M 7 This allows adjustments to the maximum rudder movement,either side of midships, obtainable under autopilot control.The Dockside Settings automatically calculated this value,however Rudder Limits allows manual override.Press the key, "RUDLIM" is displayed. Change thesetting by using the or keys.
The range is from 4 (16º) to 10 (40º).
Ensure the limit setting does not allow the rudder totouch its mechanical end stops.
8.11 Dodge Limits
D G E L I M 1 0 This limits the maximum rudder movement, either side ofmidships, that the dodge function can use. It should be setso that the vessel will not execute a dangerous turn at fullspeed.Press the key, "DGELIM" is displayed. Change thesetting by using the or keys.
The range is from 1 (4º) to 10 (40º). It cannot be set greaterthan the Rudder Limit.

5 3
8.12 Amplified Rudder Feedback Unit
A M P F D F B This setting is the software equivalent of moving J1 in thePilot computer. Some Rudder feedback units require thesignal amplifier to be turned off. Provided the jumper J1 inthe Pilot computer is in the factory default position(amplified), this setting turns the amplifier off or back on.
Set to Amplified for set to Non-amplified for930809 930837930819 Linears with integral RFU
Press the key, the current setting is displayed.Change the setting by using the or keys.
The choice is �AMPFD FB� amplifier on (factory default)or �N O A M P FB� No amplification.
8.13 Rudder Gauge Type
C E T R E K This setting is not used yet.
8.14 Off Course Alarm
An Off Course Alarm can be turned on. It can be set from 1ºto 20º in 1º steps.
O c a o f f As soon as the vessel has been Off Course by the set amountfor a period of 30 seconds the Off Course alarm (OCA) will betriggered.
The alarm will be triggered instantly if the vessel becomes offcourse by more than twice the set amount.
Once the vessel is back on course the alarm will cancel. Itcannot be manually cancelled.
The range is from OFF , then 1 (1º) to 20 (20º).The default is OFF.
Press the key, "OCA OFF" is displayed. Change thesetting by using the or keys.
The Compass Difference alarm uses this value, as explained insections 2 and 3.

ProPilots 731 and 741
5 4
8.15 Watch Alarm
W A T C H O N When set, if the autopilot is in Auto mode and a key has notbeen pressed for four minutes the LCD will display the WatchAlarm message. If a key is not then pressed within a furtherminute, the 619 external alarm will also be triggered (if it hasnot been turned off) . A key press resets the alarm.Turn the alarm on or off with the or keys.The default is off.
8.16 Timed Alarm
T I M E 2 H R A timed alarm can only be used if the watch alarm is notbeing used. The 5 minute Timed alarm is the same as theWatch alarm above.If set, when the Pilot is in Auto, the internal and any externalalarm will go off at the end of the timed period, either30min, 60min, 2hr or 4hr.Press the key to silence and reset the alarm.If a Timed alarm is set, it cancels the Watch alarm.
Change the setting by using the or keys.The default is off.
8.17 External Alarm (619 0nly)
X A L M O N This allows any external alarm system connected to User Port2 in the 930619 Pilot Computer to be turned on or off.Press the key until "XALM ON" is displayed. Turn thealarm on or off by using the or keys.The default is on.
8.18 Power Steer Gain
P S T E E R 5 This adjusts the sensitivity of the steering when it iscontrolled by a remote Cetrek Proportional steer.Press the key, "PSTEER" is displayed. Change thesetting by using the or keys.
The range is from 1 (least sensitive) to 10 (most sensitive).The default is 5.

5 5
8.19 Navigator Gain
N A V G N 5 If your Pilot is working with a Navigator, adjustment ofNavigator Gain will be available. The speed of the vesselaffects the Navigator Gain, high speed requires lessNavigator Gain and slow speed requires higher NavigatorGain
Set the navigator�s output data to minimum damping (1second intervals) and set the Navigator Gain to 5 (this issuitable for most applications).
If this is set too high the pilot will trim the vessel�s course toomuch causing the vessel to oversteer either side of thedesired track. If the Navigator Gain is set too low the vesselis pushed off track, the pilot will not bring the vessel to thedesired track � X T E 0 0 0�.
Press the key, �NAVGN� is displayed.
The range is from 0 (No Gain) to 9 (Maximum Gain).The default setting is 5.
Navigator Gain

ProPilots 731 and 741
5 6
8.20 Waypoint Sequence
When following a route, prepared on a navigator or plotter,there are two options: the Pilot can follow the whole routeautomatically or to require manual acceptance of a changeof course.
A U T O W P T When Automatic Waypoint Sequence is selected, the Pilot onreaching a waypoint will flash the bearing to next waypoint,for 7 seconds, but turn onto it automatically after the first 2seconds.
M A N W P T When Manual Waypoint Acceptance is selected, the Pilot, onreaching a waypoint, will scroll the message �NEW WPTPRESS AUTO� for 10 seconds. The vessel will not turn ontothe new course unless the key is pressed.
If the key has NOT been pressed, after 7seconds the Pilot will switch to Compass controland continue on its present heading until newinstructions are received.
In the Pilot Configuration Menu, press the key until"A U T O W P T " or �M A N W P T� is displayed. Change thesetting by using the or keys.
8.21 Navigator Name
N A V 1 N A M E Change the Navigator Name to reflect the type of navigatorconnected to NMEA 1: "NAV", "DECCA", "LORAN", "GPS" or"PLOT".Additional ports, NMEA 2 and NMEA 3 are available with a930619 Pilot Computer. Change the NAV2 and NAV3NAME,in the same manner, if other navigators are fitted.
Change the setting by using the or keys.

5 7
8.22 Large Vessel setting (619 only)
B O A T This setting allows the selection of the �SHIP�option,which can make a difference when setting up large, slowvessels. It modifies the response of the Trim and Counterrudder settings. It also allows access to Counter rudder Timeand Counter rudder Speed settings.
Change by pressing the and keys simultaneously.
8.23 Counter rudder time(619 systems only, when �SHIP� is selected)
C R T I M E 1 This setting adjusts the time over which counter rudder isremoved to achieve the desired heading. The higher thevalue, the longer counter rudder is applied for.
The range is from 0 to 20. The default setting is 1.Change the setting by using the or keys.
8.24 Counter rudder speed(619 systems only, when �SHIP� is selected)
C R S P D 1 This setting adjusts the frequency that the Pilot Computerrecalculates the amount of counter rudder to use.With slow turning vessels, slowing the frequency allows amore effective rate of turn measurement to be used in thecounter rudder calculation. The higher the value, the longer the time betweencalculations.
The range is from 1 to 11. The default setting is 1.Change the setting by using the or keys.

ProPilots 731 and 741
5 8
8.25 Compass Damping (580 compass 0nly)
A U T O C D The Pilot will automatically calculate a suitable dampingsetting for the compass display to correspond with seaconditions, using the Automatic Compass Damping routine.
The normal setting is Automatic Compass Damping, this mayonly need to be changed if the compass has been mountedhigh above the waterline.
Press the key, "A U T O CD " or �C D A M P� isdisplayed. Change the setting by using the or keys.
The range of settings is: Automatic Compass Damping; thenfrom 1 minimum to 10 maximum damping.The default is Automatic.
8.26 Compass source(619 systems only, when Compass Type 8.30 is �Magnetic�)
C O M P A U T O This allows selection between two magnetic compass�. Theoptions are �AUTO�, �INTERNAL� or � EXTERNAL�.When �AUTO� is selected, at power up, the 619 will look fora 580, if it cannot find one it will look for a Cetrek Data orHDM message on PL12 and use that.
�INTERNAL� forces the 619 to use the 580 compass.
�EXTERNAL� forces the use of the compass connected to PL12.
Press the key, "C O M P A U T O " , �C O M P I N T � or�C O M P E X T � is displayed.Change the setting by using the or keys.
If this is changed incorrectly an alarm message shows. Pressthe key to supress the alarm and allow the setting tobe corrected.

5 9
8.27 Gyro Type(619 systems only, when Compass Type 8.30 is �Gyro�)
G Y R O S T E P Selects between Stepper and HDT gyro types.Change the setting by using the or keys.
If this is changed incorrectly an alarm message shows. Pressthe key to supress the alarm and allow the setting tobe corrected.
8.28 Gyro Cal(619 systems only, when Compass Type 8.30 is �Gyro� andGyro Type 8.27 is Stepper)
G Y R O C A L This calibration aligns the Gyro with the vessels heading.Press the and keys simultaneously. The heading willflash. Use the and keys or rotate the Course controlknob until the LCD displays the ships heading.Press the and keys simultaneously to accept thesetting.If the system is set to startup in Gyro Stepper mode,calibration will be displayed whenever the system is poweredup. Set the heading as above , then the Pilot will switch tonormal mode.
8.29 Gyro ratio(619 systems only, when Compass Type 8.30 is �Gyro� andGyro Type 8.27 is Stepper)
G Y R A T 3 6 0 When first installing the gyro stepper it will be necessary totell the pilot the gyro rate. It can be 90, 180 or 360.Press the and keys simultaneously to change thesetting.
8.30 Gyro or Magnetic compass(619 systems only)
M A G N E T I C This allows switching between a Magnetic and a Gyrocompass.Change by pressing the and keys simultaneously.
If this is changed incorrectly an alarm message shows. Pressthe key to supress the alarm and allow the setting tobe corrected.

ProPilots 731 and 741
6 0
Press and hold the key to exit the Pilot Configurationmenu.
Save any changed settings by turning the Pilot OFF bypressing and holding the key.
It is advisable to record the optimised settings, incase they are accidentally changed at any time.
Be cautious about using these next twosettings.
8.31 Restore
r E S t o r e When this message is displayed, pressing the and keys simultaneously will return the default
values to all settings ( including boat type to Planing) apartfrom the Rudder Settings and Compass Calibration andAlignment values.The display will flash once when the values have been reset.Reset the boat type, unless it is a Planing hull, as described insection7, step 3, page 37.
8.32 Reset All
R E S E T A L L When this message is displayed, pressing the and keys simultaneously will clear all values. It
will also reset the default values to all other settings.The pilot will switch off once the reset has been done.

6 1
8.33 Pilot Configuration menu summaryFrom standby, press and hold key to enter or exit this menu.
Key Display Function See Section
R U D D E R Rudder Ratio (0-20 ) .................................... 5.1 and 8.1
R E S P Response (A1-5, then 1-2, 5 or 20) ................... 5.2 and 8.2
C - R U D Counter Rudder (0-20) ........................................... 8.3
TURNR * Turn Rate (0-20) .................................................... 8.4
T R I M Trim (0-10) ......................................................... 8.5
M O T S P Motor Speed Control, or PWM Off ............................ 8.6
M O T R A M P Motor Ramp Control(0-7) ....................................... 8.7
T R S P D Transition Speed, 0 to 50 knots ................................ 8.8
R D B N D Rudder Deadband (0-20) ........................................ 8.9
R U D L I M Rudder Limits (4-10) ............................................ 8.10
D G E L I M Dodge limit (1-10) ............................................... 8.11
A M P F D Rudder Feedback amplifier (On/Off) .......................... 8.12
C E T R E K Spare setting, not used. ........................................ 8.13
O C A Off Course/Compass Difference Alarm (Off,1º to 20º). .... 8.14
W A T C H Watch Alarm (ON or OFF) ........................................ 8.15
T I M E Timed Alarm(5, 30, 60min, 2hr, 4hr) ............................ 8.16
XALM * External Alarm (On or OFF). .................................... 8.17
P S T E E R Power Steer Gain (1-10) ........................................ 8.18
N A V G N Navigator Gain (0-9) ............................................ 8.19
AUTO W P T Waypoint Sequence (Auto or Manual) ...................... 8.20
N A V N A M E Navigator Name ................................................. 8.21
BOAT * Large vessel setting (BOAT or SHIP) .............................. 8.22
C R T I M E * Counter rudder Time (1-20) ...................................... 8.23
CRSPD * Counter rudder Speed (1-11) .................................... 8.24
AUT O CD Compass Damping, (Auto or 0-5) ............................. 8.25
C O M P A U T O Magnetic Compass Source (Auto, int, ext) .................. 8.26
S T E P P E R * Gyro Type (Stepper or HDT) .................................... 8.27
G Y R O C A L * Gyro Calibration (set heading) ................................ 8.28
G Y R A T E * Gyro Ratio (90, 180 or 360) .................................... 8.29
M A G N E T I C * Compass Selector (Magnetic or Gyro) ........................ 8.30
R E S T O R E Restore defaults (not Rudder & Compass) ................... 8.31
R E S E T A L L Clear Rudder & Compass , restore all defaults. ............. 8.32
(*= not always seen, dependant on Pilot computer and configuration )
ñ
ñ
ñ
ñ

ProPilots 731 and 741
6 2
9. System Messages9. System Messages9. System Messages9. System Messages9. System Messages
If your autopilot detects a problem with the system it willdisplay a warning on the LCD. For safety, a very seriousproblem will also turn the autopilot to Standby (manualsteering) mode. Here are the messages that we hope you willnever see, along with some explanations and some tips onwhat to do before you call your Cetrek dealer.
System AlarmsLOW BATTERY The battery voltage is low.
� Clear the alarm by pressing any key except the OFF key.Once cleared the alarm will not trigger again until theautopilot has been turned off and back on again. If thevoltage drops too low, autopilot operation may be impaired.Check the vessel�s charging system.
NAVIGATORALARM
� The autopilot has received more Navigator Data than itexpected or
� The autopilot has �timed out� because it has not receivedexpected Navigator Data within a predetermined length oftime.
Make the following checks:
� That the Navigator is turned on.� That the Data output format from the Navigator is
NMEA 0183.� That NAV is selected correctly.� On the PCB inside the Pilot computer there are LED�s
beside each NAV port (PL11 in 609, PL11, 16 & 17 in 619).The LED for each port will flash if data is being received bythat port.
� Check the Navigator for bad reception or faultyequipment.
� Check the data output from the Navigator.

6 3
10. System Faults10. System Faults10. System Faults10. System Faults10. System Faults
The System faults are identified by numbers as indicatedbelow. A full list of system faults can be found in the PilotComputer Installation Guide.
For safety reasons, some faults will result in theautopilot automatically switching to Manual mode.
002 NOVRAM CHECKSUM ERROR� This fault may indicate that the Autopilot�s storedparameters are no longer valid, these should be checkedbefore further use. It may appear immediately after asoftware update. If so, switch the unit off at the Pilot Controlhead and back on again to clear it.
036 EXTERNAL COMPASS MESSAGE FAULT� The compass message has not been received correctly bythe Pilot Computer.If this occurs repeatedly then the compass should berepaired.
130 STACK OVERFLOW
� Indicates that the software has crashed. This may be due toexcessive electrical noise near the pilot computer. Removeany sources of electrical noise then power OFF and back ONagain to clear the fault. If the problem persists, consult yourlocal Cetrek dealer or distributor.
134 CONTROL HEAD ALARM.� Indicates that data from the Pilot Control connected toPL10 is not present. Check the cable and connections.
165 COMPASS TIMEOUT� The Pilot computer is not receiving heading informationfrom the compass/gyro. Check the supply and wiring.If a 580 sensor is connected, check PL8, pins 2, 3 and 4. Theirvoltage should be 2.5V ±1.5V, if they are not, the compass isfaulty.
176 RATE SENSOR ALARM� Indicates that the data signal from the optional Rate Gyrois no longer present (PL19 pin4 is at 5V). PL19 pin4 should beat a nominal 2.5V when data is present.

ProPilots 731 and 741
6 4
192 GYRO STEPPER ALARM� Indicates that the data signals from the Gyro stepper arefaulty, all high or all lowCheck LEDs on 930525 PCB.
198 RUDDER FEEDBACK FAULT� This may be caused by a fault in the Rudder Feedback Unit,wiring, excessive travel on the Rudder Feedback Arm or thesoftware setting (or the link J1) is set incorrectly.Check that the Rudder Feedback Unit and its linkage has notbeen knocked or damaged.
200 MOTOR PHASING CHECK� This indicates that the rudder setting data is wrong. Repeatthe rudder setting routine detailed in section 7.4.
224 RUDDER DRIVE FAULT� The Pilot computer has sent a drive command to the driveunit but the Rudder Feedback Unit has not detected a changein the rudder position.
Check that the Rudder Feedback has not becomedisconnected from the Rudder Arm, also check that thesteering system, especially the motor, is operating the ruddergear correctly.
Ensure that the drive unit cables have not becomedisconnected or loose.
If You Need Assistance
If you do ever need to contact your Cetrek Dealer orDistributor, it would save time if you could make a note ofthe following details for them:
For each unit in the system:
Model number:
Serial number:
Software version:
A description of the failure.

6 5
11. Rudder Angle T11. Rudder Angle T11. Rudder Angle T11. Rudder Angle T11. Rudder Angle Templateemplateemplateemplateemplate

ProPilots 731 and 741
6 6
12. Default settings12. Default settings12. Default settings12. Default settings12. Default settingsBoat type variations:609s use Pilot A settings.
Planing boat type Pilot A, B, CRudder Ratio 4, 6, 6Counter Rudder 1, 2, 2
Semi disp. boat type Pilot A, B, CRudder Ratio 7, 10, 10Counter Rudder 3, 4, 4
Disp. boat type Pilot A, B, CRudder Ratio 10, 12, 12Counter Rudder 4, 6, 6
INFO list 609 619Live Heading ON ONPilot A, B, C (619 only) ONRudder Ratio ON ONResponse ON ONCounter Rudder OFF OFFTurn Rate (619 only) ONTrim OFF OFFWPT Name OFF OFFXTE OFF OFFBearing OFF OFFDistance OFF OFFSpeed OFF OFFDepth OFF OFFSOG OFF OFFCOG OFF OFFWater Temperature OFF OFFBattery Voltage OFF OFFDig. Rudder Angle OFF OFF
Pilot SettingsBoat type PlaningRudder Ratio 4Response AdaptiveCounter Rudder 1Turn Rate (619 only) 20Trim 4Motor Speed Control 100%Motor Ramp 2Transition Speed no trspdRudder Deadband 3Rudder Limits (Set at Dockside settings)Dodge Limits 10Amplified RFU AMPFD FBRudder Gauge Type CETREKOff Course/Compass Diff Alarm OFFWatch Alarm OFFTimed Alarm OFFExternal alarm (619 only) ONPower Steer Gain 5Navigator Gain 5WPT Sequence AutoNavigator Name 1 NameNavigator Name 2 (619 only) NameNavigator Name 3 (619 only) NameBoat or Ship (619 only) BOATCounter Rudder Time (619 Ship only) 0Counter Rudder speed (619 Ship only) 1Compass Damping AUTO CDCompass Type AUTOGyro Type (619 Gyro only) StepperGyro Cal (619 Stepper only) 00Gyro Ratio (619 stepper only) 360Magnetic or Gyro (619 only) MagneticRestore not relevantReset All not relevant

6 7
IndexIndexIndexIndexIndex
AAdaptive .......................................... 27Alarm .............................................. 62Alarm, audible ................................ 8, 53Alarm, external ................................... 54Alarm, Off Course .......................... 18, 53Alarm, Timed ..................................... 54Alarm, Watch ..................................... 54Align Compass ................................... 39'AMPFD FB' ........................................ 53Amplified RFU .................................... 53Arrow Keys ....................................... 12Audible alarm .................................... 53'AUTO CD' ......................................... 58Auto Mode ......................... 10, 11, 24, 56Auto Symbol ..................................... 10Automatic Waypoint Following .......... 24, 56Autopilot Control ..........................3, 7, 32
BBasic Equipment .............................. 3, 30Bearing to Next Waypoint ............ 23, 24, 56BOAT .............................................. 57Boat Type ......................................... 37Brightness ......................................... 9
CCable .............................................. 34
Screen ........................................ 34Calibrate, Compass .............................. 43Calibrate. Gyro ................................... 59'CDAMP ' .......................................... 58Center rudder .................................... 44Clear all values ................................... 60Comp ext ......................................... 17Comp int .......................................... 17Compass
Align .......................................... 44Deviation Correction ....................... 42
Compass Control ................................ 17Compass Damping .............................. 58Compass Difference ............................. 18Compass Difference Alarm ..................... 20Compass Difference alarm ..................... 53Compass Sensor ......................... 3, 30, 43Compass source ................................. 58Compauto ........................................ 17Connections ...................................... 34Counter Rudder .................................. 47Counter rudder speed .......................... 57Counter rudder time ............................ 57Course Change .............................. 12, 13
Course, Off alarm................................ 53Course Over Ground ............................ 21Course Select Knob .............................. 13Cross Track Error ................................. 23Customising ...................................... 14
DDefault Settings ............................. 37, 66Depth Units ....................................... 14Deviation Correction,Compass ................ 42Digital Rudder .................................... 15Displacement Vessel ............................. 37Displayed settings ............................... 13Dodge ............................................. 12Drag ............................................... 48Drive Unit ...................................... 3, 30
EEnd stop .......................................... 39Engage Navigator Control ..................... 17Error, compass ................................... 43External Alarm ................................... 54
FFunction keys ...................................... 7
GGyro .......................................... 19, 59Gyro Cal ........................................... 59Gyro ratio ......................................... 59Gyro Type .................................... 57, 59
HHard-over time .............................. 41, 49Heading ................................. 12, 25, 36Hunting ........................................... 52
IInformation display ............................. 13Information List ............................... 9, 13Installation Settings ............................. 36Installation Steps 1- 5 ........................... 35
JJog Steer .......................................... 11Jumper J1 ......................................... 53
KKeyboard ........................................... 9
LLarge Vessel setting ............................. 57LCD Display ........................................ 9Lighting ........................................ 9, 16Low Battery ....................................... 62

ProPilots 731 and 741
6 8
MManual Control ............................. 11, 17Manual Waypoint Acceptance ................. 56Menu .............................................. 35Motor Speed Control ........................... 49Motor Speed Reduction Angle ................ 50Mounting pilots ............................ 32, 33
NNavigator
Control ....................................... 21Course Over Ground ....................... 21Selecting NMEA Input ...................... 23
Navigator Alarm ................................. 62Navigator Gain ................................... 55Navigator Name ................................. 56'NEW WAYPOINT PRESS AUTO' ............ 24, 56NMEA
0183 Messages .............................. 22Speed Message .............................. 26
NMEA sentences ................................. 14'NO TRSPD' ....................................... 51'NOAMP FB' ....................................... 53
OOCA ................................................ 18OFF .................................................. 9Off Course Alarm ........................... 18, 53Operating Temperature ......................... 31Oversteer .......................................... 26
PPilot A, B, C ....................................... 16Pilot Computer ...................... 3, 26, 30, 34Pilot Configuration ...................... 9, 46, 61Planing Vessel .................................... 37Power Steer Gain ................................ 54Power Supply ..................................... 30Pulse Width Modulation ........................ 49PWM ............................................... 49
RRate Sensor ....................................... 10Reset All ........................................... 60Response ................................ 26, 27, 46Response,Adaptive .............................. 27Restore ............................................ 60Rudder
Center ........................................ 44Centering .................................... 53Deadband .................................... 52Ratio ..................................... 26, 46
Rudder Angle Template .................... 38, 65Rudder Feedback Unit .................. 3, 30, 37Rudder Limits .......................... 15, 39, 52
Rudder Position Indicator ...................... 15Rudder Ratio ..................................... 45Rudder Settings Routine........................ 38
Motor Phasing ......................... 38�39Rudder Limits ................................ 38Rudder Phasing ............................. 38Rudder Position Display .................... 36Rudder Set ................................... 39
SSafety ...................................... 3, 32, 63Sea State Adjustments .......................... 26Sea Trials .......................................... 42Self Test ........................................... 10Semi-Displacement Vessel ...................... 37SHIP ................................................ 57Skip ................................................ 35Software Version Number ...................... 10Specifications .................................... 31Speed
NMEA ......................................... 26Transition (Rudder Ratio) .................. 51
Spool Valve ....................................... 10Standby Mode ................................... 10Standby Symbol ................................. 10Standing helm ................................... 48Stepper gyro ..................................... 19Storage Temperature ............................ 31Switching between Compass' ................. 19Switching Off ..................................... 9Switching On ............................. 9, 10, 36System Faults ..................................... 63System Messages ................................ 62
TTarget .............................................. 21Temperature ratings ............................. 31Template, Rudder angle ........................ 65Timed Alarm...................................... 54Top bar ............................................ 18Transition Speed (Rudder Ratio) ............... 51Trim ................................................ 48Turn radius ................................... 28, 48Turn Rate ..................................... 28, 48
UUndersteer ........................................ 26
WWatch Alarm ..................................... 54Waypoint Identifier .............................. 23Waypoint Sequence ............................. 56