Using Functional Characteristics to Analyze State Changes ...
Upload
paradoxendazzlingCategory
view
215download
0
8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 1/9
ME2142 Feedback Control Systems1
Steady-State Characteristics
Steady-State Characteristics
ME2142 Feedback Control Systems

8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 2/9
ME2142 Feedback Control Systems2
Consider the unity-feedback system
Consider the unity-feedback system
System Type
RG
C
-
+ E
With … (2-1)
The parameter N associated with the term S N in the
denominator represents the “Type” of the system.Example Type ! if "#!$ Type 1 if "#1 and so on.
% free “s” term in the denominator represents aninte&ration. The hi&her the type n'mer$ the etter thesteady-state acc'racy of the closed-loop control system.
owe*er$ the hi&her the system type$ the &reater theprolem with system staility.
)1()1)(1()1()1)(1()(
21 +++
+++=
sT sT sT s
sT sT sT K sG p
N
mba

8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 3/9
ME2142 Feedback Control Systems3
Examples of System Types
RG
C
-
+ E
Type 1 systems ! !
)1()(+
= s s
K
sG τ )2()( 22
nn s s s
K sG ω ζω ++
=
Type " systems ! !
)1(
)(
+
=
s
K sG
τ ))((
)(
21 p s p s
K sG
++
=
22 2)(
nn s s
K sG
ω ζω ++=
Type 2 systems ! !
)1()(
2+
= s s
K sG
τ ))(()(
21
2 p s p s s
K sG
++=

8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 4/9
ME2142 Feedback Control Systems4
The unity-feedback system
The unity-feedback system
Steady-state Errors # Static Error Constants
RG
C
-
+ E R
C R
R
E −=
R
C −= 1
G
G
+
−=
11
G
GG
+
−+=
1
)1(
G R E
+=1
1
Error Transfer f'nction
Th's )()(1
1)( s R
sG s E
+=
and the steady-state error is)(lim t ee t
ss∞→=
)(lim0
s sE s→
=
)(1
)(lim
0 sG
s sRe
s ss
+=
→

8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 5/9
ME2142 Feedback Control Systems5
Steady-state Errors # Static Error Constants
)(1
)(lim
0 sG
s sRe
s
ss
+
=→
+or a 'nit-step inp't
+or a 'nit-step inp't s
s R 1)( = and
s sG
se
s ss
1
)(1lim
0 +=
→ )0(1
1
G+
=
,tatic osition Error onstant$ K p is defined as
)0()(lim0
G sG K s
p ==
→
and
p
ss K
e+
=1
1
with $
)1()1)(1(
)1()1)(1()(
21 +++
+++=
sT sT sT s
sT sT sT K sG
p
N
mba
for Type ! systems K K p =
for Type 1 or hi&her systems
K e ss
+=1
1
∞= p K 0= sse

8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 6/9
ME2142 Feedback Control Systems6
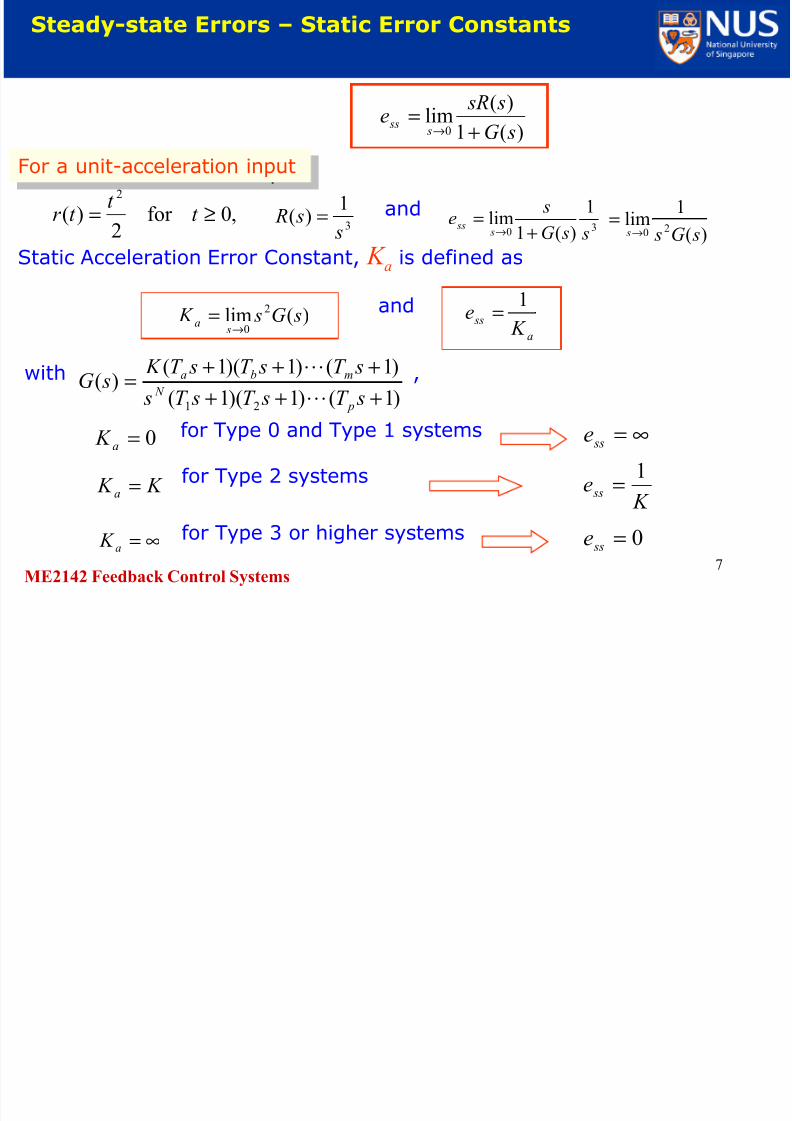
Steady-state Errors # Static Error Constants
)(1
)(lim
0
sG
s sRe
s ss
+
=→
+or a 'nit-ramp inp't
+or a 'nit-ramp inp't2
1)(
s s R = and
20
1
)(1lim
s sG
se
s ss
+=
→ )(
1lim
0 s sG s→=
,tatic /elocity Error onstant$ K v is defined as
and)(lim0 s sG K sv
→=
v
ss K
e 1=
with $
)1()1)(1(
)1()1)(1()(
21 +++
+++=
sT sT sT s
sT sT sT K sG
p
N
mba
for Type ! systems
for Type 1 systems
0= sse
0=v
K
for Type 2 or hi&her systems
K K v = K
e ss1
=
∞= sse
∞=v K
8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 7/9
8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 8/9ME2142 Feedback Control Systems8
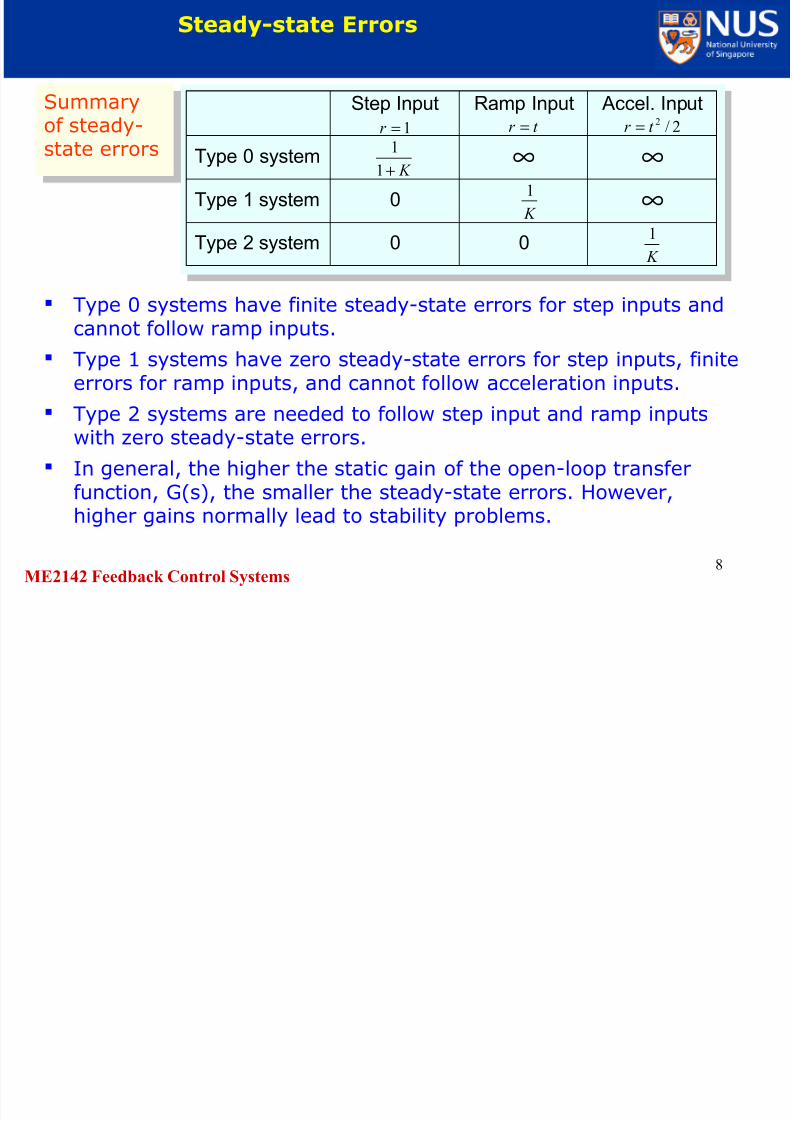
Steady-state Errors
,'mmary
of steady-state errors
,'mmaryof steady-state errors
Step Input
1=r
Ramp Inputt r =
Accel. Input2/2t r =
Type 0 system K +1
1 ∞ ∞
Type 1 system 0 K
1 ∞
Type 2 system 0 0 K
1
Type ! systems ha*e finite steady-state errors for step inp'ts andcannot follow ramp inp'ts.
Type 1 systems ha*e ero steady-state errors for step inp'ts$ finiteerrors for ramp inp'ts$ and cannot follow acceleration inp'ts.
Type 2 systems are needed to follow step inp't and ramp inp'tswith ero steady-state errors.
n &eneral$ the hi&her the static &ain of the open-loop transferf'nction$ 3(s)$ the smaller the steady-state errors. owe*er$hi&her &ains normally lead to staility prolems.
8/9/2019 6Steady State Characteristics
http://slidepdf.com/reader/full/6steady-state-characteristics 9/9ME2142 Feedback Control Systems9
End