
564906
8
Hindawi Publishing Corporation Journal of Control Science and Engineering Volume 2012, Article ID 564906, 7 pages doi:10.1155/2012/564906 Research Article On Chattering-Free Dynamic Sliding Mode Controller Design Jeang-Lin Chang Department of Electrical Engineering, Oriental Institute of Technology, Banchiao, New Taipei City 220, Taiwan Correspondence should be addressed to Jeang-Lin Chang, [email protected] Received 7 June 2012; Revised 7 August 2012; Accepted 8 August 2012 Academic Editor: Zhiyong Chen Copyright © 2012 Jeang-Lin Chang. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. For a class of linear MIMO uncertain systems, a dynamic sliding mode control algorithm that avoids the chattering problem is proposed in this paper. Without using any differentiator, we develop a modified asymptotically stable second-order sliding mode control law in which the proposed controller can guarantee the finite time convergence to the sliding mode and can show that the system states asymptotically approach to zero. Finally, a numerical example is explained for demonstrating the applicability of the proposed scheme. 1. Introduction Sliding mode control (SMC) has been successfully used in controlling many uncertain systems [1, 2]. For a system with the matched disturbance, SMC can obtain the perfect disturbance rejection during the sliding mode. The control objectives are attained by constraining the system dynamics on a properly chosen sliding variable by means of discon- tinuous control laws. In theory, SMC offers robust stability to systems through high-gain control with the infinite fast switching action. However, high-gain control designs suffer from the drawback of peaking phenomenon, in which the control input peaks to an extremely large value during the transient stage. The peaking phenomenon can easily violate the control saturation constraint. The SMC scheme is often discontinuous and the feedback control input needs to switch with infinite switching frequency. The discontinuous high speed switching action results in the chattering problem due to the inherent delay and other problems [1, 2]. The chattering action may excite the unmodeled high order dynamics, which probably leads to unforeseen instability [1– 5]. There are two major approaches reported to cope with the chattering problem. The first approach is to insert a fixed or variable boundary layer near the sliding variable [6], so that a continuous control replaces the discontinuous one when the system is inside the boundary layer. Another approach to eliminate the chattering is carried out by adding an auxiliary control input into the system such as using of fuzzy control [7, 8] and adaptive fuzzy control [9]. These mentioned methods [1–5] can give a chattering-free system, but a finite steady-state error may exist. Hence, the property of perfect disturbance rejection cannot be guaranteed. Dynamic sliding mode control [10–14] where an inte- grator is used in front of the system is a special approach to eliminate the control chattering. The time derivative of the control input is treated as the new control variable for the augmented system in which the augmented system is includes the original system and the integrator. Since no boundary layer is used in the controller, the advantages of a dynamic sliding mode controller are that chattering reduction is obtained by using an integrator and the prop- erty of perfect disturbance rejection is guaranteed. Hence, dynamic sliding mode control not only removes some of the fundamental limitations of the traditional approach but also provides improved tracking accuracy under sliding mode. The main problem in implementation of dynamic sliding mode controller is the increasing information demand in which the knowledge of the derivative of the sliding variable is required. Bartolini et al. [11, 12] presented a suboptimal version of the twisting algorithm [15, 16] to cope with the chattering problem. However, this method requires at least the knowledge of the sign of the derivative of the sliding variable. Chen et al. [14] applied an LTR observer to over- come the problem of sliding variable estimation. Recently, Levant [15–17] presented the twisting algorithm to stabilize second-order nonlinear systems but required the knowledge
-
Upload
chinguyenvan -
Category
Documents
-
view
217 -
download
0
description
Chattering in Sliding Mode Control and its Reduction - An Overview of Methods
Transcript of 564906

Hindawi Publishing CorporationJournal of Control Science and EngineeringVolume 2012, Article ID 564906, 7 pagesdoi:10.1155/2012/564906
Research Article
On Chattering-Free Dynamic Sliding Mode Controller Design
Jeang-Lin Chang
Department of Electrical Engineering, Oriental Institute of Technology, Banchiao, New Taipei City 220, Taiwan
Correspondence should be addressed to Jeang-Lin Chang, [email protected]
Received 7 June 2012; Revised 7 August 2012; Accepted 8 August 2012
Academic Editor: Zhiyong Chen
Copyright © 2012 Jeang-Lin Chang. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
For a class of linear MIMO uncertain systems, a dynamic sliding mode control algorithm that avoids the chattering problem isproposed in this paper. Without using any differentiator, we develop a modified asymptotically stable second-order sliding modecontrol law in which the proposed controller can guarantee the finite time convergence to the sliding mode and can show that thesystem states asymptotically approach to zero. Finally, a numerical example is explained for demonstrating the applicability of theproposed scheme.
1. Introduction
Sliding mode control (SMC) has been successfully used incontrolling many uncertain systems [1, 2]. For a systemwith the matched disturbance, SMC can obtain the perfectdisturbance rejection during the sliding mode. The controlobjectives are attained by constraining the system dynamicson a properly chosen sliding variable by means of discon-tinuous control laws. In theory, SMC offers robust stabilityto systems through high-gain control with the infinite fastswitching action. However, high-gain control designs sufferfrom the drawback of peaking phenomenon, in which thecontrol input peaks to an extremely large value during thetransient stage. The peaking phenomenon can easily violatethe control saturation constraint. The SMC scheme is oftendiscontinuous and the feedback control input needs to switchwith infinite switching frequency. The discontinuous highspeed switching action results in the chattering problemdue to the inherent delay and other problems [1, 2]. Thechattering action may excite the unmodeled high orderdynamics, which probably leads to unforeseen instability [1–5]. There are two major approaches reported to cope withthe chattering problem. The first approach is to insert afixed or variable boundary layer near the sliding variable[6], so that a continuous control replaces the discontinuousone when the system is inside the boundary layer. Anotherapproach to eliminate the chattering is carried out by addingan auxiliary control input into the system such as using of
fuzzy control [7, 8] and adaptive fuzzy control [9]. Thesementioned methods [1–5] can give a chattering-free system,but a finite steady-state error may exist. Hence, the propertyof perfect disturbance rejection cannot be guaranteed.
Dynamic sliding mode control [10–14] where an inte-grator is used in front of the system is a special approachto eliminate the control chattering. The time derivative ofthe control input is treated as the new control variable forthe augmented system in which the augmented system isincludes the original system and the integrator. Since noboundary layer is used in the controller, the advantagesof a dynamic sliding mode controller are that chatteringreduction is obtained by using an integrator and the prop-erty of perfect disturbance rejection is guaranteed. Hence,dynamic sliding mode control not only removes some of thefundamental limitations of the traditional approach but alsoprovides improved tracking accuracy under sliding mode.The main problem in implementation of dynamic slidingmode controller is the increasing information demand inwhich the knowledge of the derivative of the sliding variableis required. Bartolini et al. [11, 12] presented a suboptimalversion of the twisting algorithm [15, 16] to cope with thechattering problem. However, this method requires at leastthe knowledge of the sign of the derivative of the slidingvariable. Chen et al. [14] applied an LTR observer to over-come the problem of sliding variable estimation. Recently,Levant [15–17] presented the twisting algorithm to stabilizesecond-order nonlinear systems but required the knowledge

2 Journal of Control Science and Engineering
of the derivative of the sliding variable. The super twistingalgorithm [15, 16] does not require the output derivativeto be measured but it has been originally developed andanalyzed for system with relative degree one. Levant [17]proposed an exact finite time convergence differentiatorwhich can successfully estimate the derivative of the slidingvariable but required a priori bounded trajectory.
For a linear MIMO system with the matched disturbance,an alternative dynamic sliding mode controller for avoidingthe chattering problem is established in this paper. Wefirst present a modified second-order sliding mode controlmethod to stabilize the perturbed system. Introducinga proportional-integral term of the sliding variable andan integral sign function term into the control law, theresulting control forces are chattering-free. Based on thedeveloped second-order sliding mode technique, it is shownthat the finite time convergence to the sliding mode isprovided theoretically and the zero steady-state error canbe guaranteed by applying the proposed control law. As aresult, the control accuracy is better than those performedby the conventional boundary layer control [3–5]. Moreover,a sufficient condition for the closed-loop stability is givenand the implementation of the proposed control algorithmis simple. Comparing with the conventional dynamic slidingmode controllers [10–14], the proposed method does notneed any observer structure to estimate the derivative ofthe sliding variable. Finally, the feasibility of the proposedmethod is illustrated by a numerical example.
The work of this paper is organized as follows. Section 2describes a class of uncertain MIMO linear systems andgives the problem formulation. Section 3 presents the mod-ified second-order sliding mode method and develops thedynamic sliding mode controller design. The simulationresult is included in Section 4. Section 5 offers a briefconclusion.
2. Problem Formulation
Consider an uncertain system satisfying the matched condi-tion of the form
x(t) = Ax(t) + B(u(t) + d(t, x)), (1)
where x ∈ Rn is the state vector, u ∈ Rm is the controlinput vector, y ∈ Rp is the output vector, and d ∈ Rm isthe unknown matched disturbance vector with the knownupper bounds ‖d(t, x)‖ ≤ a1 and ‖d(t, x)‖ ≤ a2. Supposethat the system states are accessible for measurement and thepair (A, B) is stabilizable. Let the sliding variable be chosenas
s(t) = Gx(t), (2)
where the matrix G ∈ Rm×n is designed to stabilize thereduced-order system. To satisfy the reaching and slidingcondition, the control input for the conventional slidingmode controller is designed as
u(t) = −(GB)−1(GAx(t) + γ sign(s(t))), (3)
where γ > 0 is a high gain to design such that the systemreaches and slides on the sliding variable in finite time.However, a phenomenon called chattering is generated dueto the discontinuous function sign(s(t)). It can be consideredas the undesired chattering effect produced by the highswitching action of the control input. As a result, the chat-tering becomes the main implementation problem of SMC.Numerous techniques have been proposed to eliminate thisphenomenon in SMC [3–14]. The one of the most commonsolution to reduce the chattering is the boundary layertechniques [3–5]. However, the boundary layer thickness hasthe trade-off relation between the control performance andthe chattering migration. Another drawback with applyingthe boundary layer methods [3–5] is the reduction of thecontrol accuracy.
For a linear MIMO system with the matched disturbance,in this paper we propose a dynamic sliding mode controlalgorithm in which the proposed procedure can effectivelyreduce the chattering effect. We first develop a modifiedsecond-order sliding mode control method to stabilize theperturbed systems. Introducing a proportional-integral termof the sliding variable and an integral sign function terminto the controller, the finite time convergence to the slidingmode is guaranteed by applying the developed second-ordersliding mode technique. Moreover, all the states of the systemasymptotically approach to zero once the system is in thesliding mode.
3. Dynamic Sliding Mode Controller Design
In this section, we propose a dynamic sliding mode controlalgorithm which can successfully avoid the chattering inthe linear MIMO system with the matched disturbance.A modified second-order sliding mode control algorithmthat does not require the derivative of the sliding variableis presented. The proposed control law can guarantee thefinite time convergence to the sliding mode and stabilize thereduced-order system in which the system states asymptoti-cally approach to zero.
For the sliding variable (2), we design the dynamic slidingmode controller as
u(t) = − (GB)−1
(
GAx(t) + L1s(t) + L2
∫ t
0s(τ)dτ
+K∫ t
0sign(s(τ))dτ
)
,
(4)
where L1 ∈ Rm×m, L2 ∈ Rm×m, and K ∈ Rm×m are thepositive definite diagonal matrix given by
L1 = diag(l11, . . . , l1m), L2 = diag(l21, . . . , l2m),
K = diag(k1, . . . , km).(5)

Journal of Control Science and Engineering 3
Taking the time derivative of (2) and substituting the controlinput (4) into it can obtain
s(t) = Gx(t) = GAx(t) + GB(u(t) + d(t, x))
= − L1s(t)− L2
∫ t
0s(τ)dτ −K
∫ t
0sign(s(τ))dτ
+ GBd(t, x).
(6)
Further differentiating (6) with time yields the followingdynamics:
s(t) + L1s(t) + L2s(t) = −K sign(s(t)) + f(t), (7)
where f(t) = GBd(x, t) = [ f1 · · · fm]T ∈ Rm. According tothe linear algebraic theory, we have ‖f(t)‖ = ‖GBd(x, t)‖ ≤a2‖GB‖ and | fi(t)| ≤ ‖f(t)‖ for 1 ≤ i ≤ m.
Lemma 1. Consider the unperturbed system as
σ(t) + l1σ(t) + l2σ(t) = −k sign(σ(t)), (8)
where the gains l1, l2, and k are positive constants. If theparameters l1 > 0 and l2 > 0 are chosen to satisfy the conditionl2 < l21/4, then σ(t) and σ(t) asymptotically converge to zero infinite time for a sufficiently large value of k.
Proof. Since the condition l2 < l21/4 holds, the roots of thecharacteristic equation, s2 + l1s + l2 = 0, are real, distinct,and negative. Assume now for simplicity that the initialconditions are σ(t0) = 0 and σ(t0) > 0. Thus the trajectoryenters the half-plane σ(t) > 0 (quadrant I), as shown inFigure 1. When σ(t) > 0, we from (8) obtain σ(t) + l1σ(t) +l2σ(t) = −k and know its equivalent point as (σ , σ) =(−k/l2, 0). Let the function g(t) be generated by
g(t) = σ(t) + rσ(t) +k
μsign(σ(t)), (9)
where μ + r = l1 and μr = l2. The parameters μ > 0 andr > 0 are real constants. Since σ(t) > 0, it follows from σ(t) +l1σ(t) + l2σ(t) + k = 0 that
dg(t)dt
+ μg(t) = d
dt
(
σ(t) + rσ(t) +k
μ
)
+ μ
(
σ(t) + rσ(t) +k
μ
)
= σ(t) +(μ + r
)σ(t) + μrσ(t) + k
= σ(t) + l1σ(t) + l2σ(t) + k = 0.
(10)
Hence, we can obtain g(t) = g(0)e−μt. It follows that theupper bound of g(t) is |g(t)| ≤ Ce−μt where C > 0 is aconstant. Choose a Lyapunov function as V(t) = (1/2)σ2(t)and then obtain its time derivative as
V(t) = σ(t)σ(t) = σ(t)
(
g(t)− k
μsign(σ(t))− rσ(t)
)
≤ C|σ(t)|e−μt − k
μ|σ(t)| − rσ2(t).
(11)
σσ(t0)
σ
σ
(t0) < 0 σ(t0) > 0
−kl2
k
l2
σ(t1)
Figure 1: Phase paths of the modified second-order sliding modesystem.
Since μ > 0, there exists a finite time, T1 > 0, such thatCe−μt < (k/μ) − ρ for a sufficiently large gain k and t > T1,where ρ > 0 is a constant. Hence,
V(t) ≤ −ρ|σ(t)| − rσ2(t) ≤ −ρ|σ(t)| for t > T1. (12)
The above equation implies that the function σ(t) convergesto zero in finite time. Let the trajectory of (8) intersectnext time with the axis σ(t) = 0 at the point σ(t1). Sincethe roots of the characteristic equation, s2 + l1s + l2 = 0,are stable, we know that the spiral trajectories convergeto the equivalent point and the behavior of σ(t) changesmonotonously. Hence,
|σ(t1)||σ(t0)| = q < 1. (13)
Extending the trajectory into the half plane σ(t) < 0 aftera similar reasoning achieves that the successive crossing theaxis σ(t) = 0 satisfies the inequality |σ(ti+1)|/|σ(ti)| = q < 1.Therefore, its solutions cross the axis σ(t) = 0 from quadrantII to quadrant I, and from quadrant IV to quadrant III.Every trajectory of the system crosses the axis σ(t) = 0 infinite time. After gluing these paths along the line σ(t) = 0,we obtain the phase portrait of the system, as shown inFigure 1. This algorithm features a twisting of the phaseportrait around the origin and an infinite number encirclingthe origin occurs. According to Levant’s papers [14–16], thetotal convergence time is estimated as
T ≤∑|σ(ti)| ≤ |σ(t0)|(1 + q + q2 + · · · ) = |σ(t0)|
1− q. (14)
As a result, we can show that the trajectories performrotations around the origin while converging in finite time tothe origin of the phase plane. The finite time convergence tothe origin is due to switching between two different controlamplitudes as the trajectory comes nearer to the origin [18].The proof of the theorem is finished.
Lemma 2. Consider the following system:
σ(t) + l1σ(t) + l2σ(t) = −k sign(σ(t)) + f (t), (15)

4 Journal of Control Science and Engineering
where the function f (t) has the upper bound | f (t)| ≤ η andη > 0 is a known constant. If the parameters l1 > 0 and l2 > 0,and the gain k are chosen to satisfy the following conditions:
l2 <l214
, k > η, (16)
then σ(t) and σ(t) converge to zero in finite time.
Proof. We take the parameters l1 and l2 to satisfy thecondition l2 < l21/4 and then obtain the characteristicpolynomial of system (15) having two distinct real rootsλ1,2 = −α,−β, where α > 0, β > 0, β > α, l1 = α + β, andl2 = αβ. When the condition σ(t) > 0 holds, (15) becomes
σ(t) + l1σ(t) + l2σ(t) = −k + f (t). (17)
Let v1 = σ + (k/l2) and v2 = v1 = σ . It follows that
v(t) =[
0 1−l2 −l1
][v1(t)v2(t)
]
+
[0f (t)
]
= Φv(t) + b f (t),
(18)
where
v =[vT1 vT2
]T ∈ R2, Φ =[
0 1−l2 −l1
]
, b =[
01
]
.
(19)
Write the above dynamic equation as its solution in anexplicit form
v(t) = eΦtv(0) + eΦt
∫ t
0eΦτb f (τ)dτ
= eΦtv(0) +∫ t
0eΦτb f (t − τ)dτ,
(20)
where
eΦt =
⎡
⎢⎢⎢⎣
1β − α
(βe−αt − αe−βt
) 1β − α
(e−αt − e−βt
)
αβ
α− β
(e−αt − e−βt
) 1α− β
(αe−αt − βe−βt
)
⎤
⎥⎥⎥⎦.
(21)
The upper bounds of v1(t) and v2(t) can be constructed as
|v1(t)| ≤ C1e−αt +
1β − α
∫ t
0
∣∣∣e−ατ − e−βτ
∣∣∣∣∣ f (t − τ)
∣∣dτ
≤ C1e−αt +
η
β − α
∫ t
0
∣∣∣e−ατ − e−βτ
∣∣∣dτ
= C1e−αt +
η
β − α
∫∞
0
(e−ατ − e−βτ
)dτ
= C1e−αt +
η
β − α
(β − α
αβ
)
= C1e−αt +
η
l2,
|v2(t)| ≤ C2e−αt +
η
β − α
(∫ t
0
∣∣∣αe−ατ − βe−βτ
∣∣∣dτ
)
≤ C2e−αt +
η
β − α
×(∫∞
0
∣∣∣αe−ατ − αe−βτ +
(α− β
)e−βτ
∣∣∣dτ
)
= C2e−αt +
η
β − α
×(∫∞
0
(αe−ατ − αe−βτ
)dτ +
(β − α
)∫∞
0e−βτdτ
)
= C2e−αt +
η
β − α
(
αβ − α
αβ+β − α
β
)
= C2e−αt +
2αηl2
,
(22)
where C1 > 0 and C2 > 0 are constants. It follows that
|v1(t)| ≤ C1e−αt +
η
l2, |v2(t)| ≤ C2e
−αt +2ηαl2
. (23)
Since v1 = σ + (k/l2), we can from (23) obtain
∣∣∣∣σ(t) +
k
l2
∣∣∣∣ ≤ C1e
−αt +η
l2. (24)
This part shows that the ball of radius r = η/l2 with centerlocated at (k/l2 , 0) is an attractor Bs1. Similar to the work, wehave, when σ(t) < 0, the ball of radius r, with center located at(−k/l2, 0) as another attractor Bs2. Choose the gain kto satisfythe inequality k > η and then we have
(k
l2− r
)= k
l2− η
l2> 0,
(− k
l2+ r)= −k
l2+η
l2< 0.
(25)
It follows from the above two inequalities that the twoattractors Bs1 and Bs2 do not intersect each other, and thebehavior of the perturbed system (15) will be qualitativelysimilar to the behavior of the nominal system. Therefore, theperturbed system converges to the origin in the same wayof the nominal system and the condition that σ(t) and σ(t)converge to zero in finite time can be guaranteed. We finishthe proof of the lemma.
Theorem 3. Consider system (1) with the sliding variable (2)and the control input (4). Let η = a2‖GB‖. If the elements ofthese matrices L1, L2, and K satisfy the following conditions:
l2i <l21i4
, ki > η, for i = 1, . . . ,m, (26)
then one can show that the system states asymptoticallyapproach to zero.
Proof. We first express system (7) as a set of second-ordersystems with the form
si(t) + l1is(t) + l2is(t) = −ki sign(si(t)) + fi(t)
for i = 1, . . . ,m,(27)
Journal of Control Science and Engineering 5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−2
−1
0
1
2
Time (s)
x1x2
x3x4
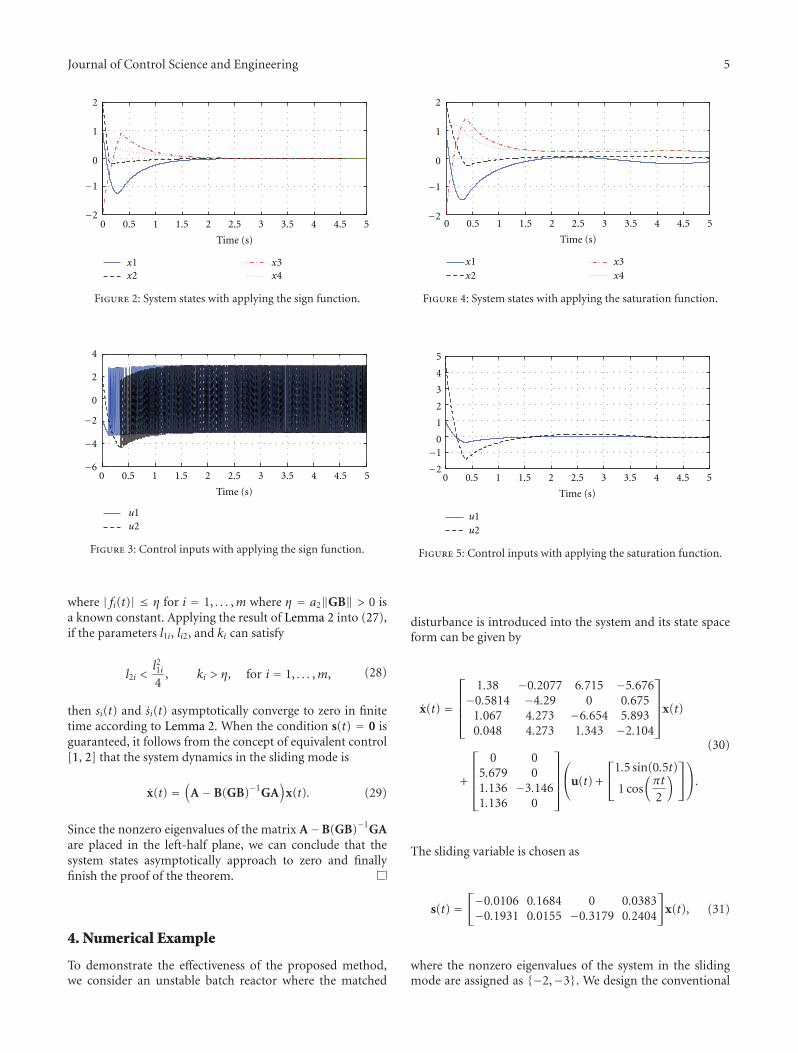
Figure 2: System states with applying the sign function.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−6
−4
−2
0
2
4
Time (s)
u1u2
Figure 3: Control inputs with applying the sign function.
where | fi(t)| ≤ η for i = 1, . . . ,m where η = a2‖GB‖ > 0 isa known constant. Applying the result of Lemma 2 into (27),if the parameters l1i, li2, and ki can satisfy
l2i <l21i4
, ki > η, for i = 1, . . . ,m, (28)
then si(t) and si(t) asymptotically converge to zero in finitetime according to Lemma 2. When the condition s(t) = 0 isguaranteed, it follows from the concept of equivalent control[1, 2] that the system dynamics in the sliding mode is
x(t) =(
A− B(GB)−1GA)
x(t). (29)
Since the nonzero eigenvalues of the matrix A−B(GB)−1GAare placed in the left-half plane, we can conclude that thesystem states asymptotically approach to zero and finallyfinish the proof of the theorem.
4. Numerical Example
To demonstrate the effectiveness of the proposed method,we consider an unstable batch reactor where the matched
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−2
−1
0
1
2
Time (s)
x1x2
x3x4
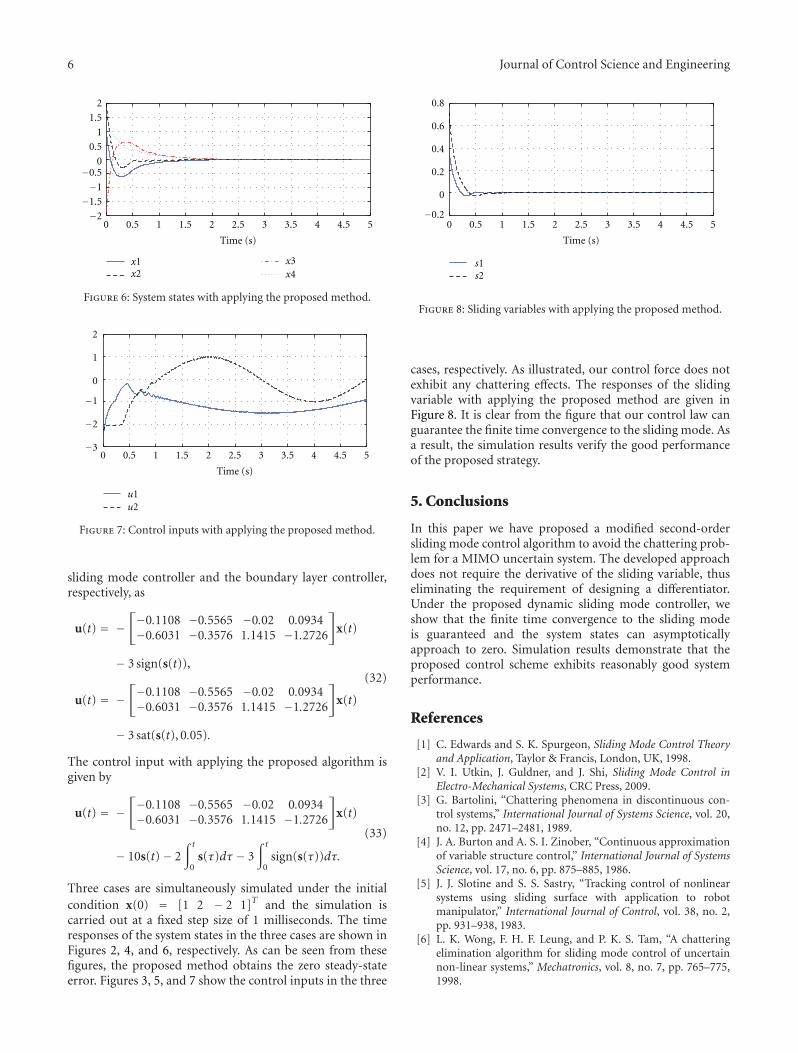
Figure 4: System states with applying the saturation function.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−2
−10
1
2
3
4
5
Time (s)
u1u2
Figure 5: Control inputs with applying the saturation function.
disturbance is introduced into the system and its state spaceform can be given by
x(t) =
⎡
⎢⎢⎢⎣
1.38 −0.2077 6.715 −5.676−0.5814 −4.29 0 0.675
1.067 4.273 −6.654 5.8930.048 4.273 1.343 −2.104
⎤
⎥⎥⎥⎦
x(t)
+
⎡
⎢⎢⎢⎣
0 05.679 01.136 −3.1461.136 0
⎤
⎥⎥⎥⎦
⎛
⎝u(t) +
⎡
⎣1.5 sin(0.5t)
1 cos(πt
2
)⎤
⎦
⎞
⎠.
(30)
The sliding variable is chosen as
s(t) =[−0.0106 0.1684 0 0.0383−0.1931 0.0155 −0.3179 0.2404
]
x(t), (31)
where the nonzero eigenvalues of the system in the slidingmode are assigned as {−2,−3}. We design the conventional
6 Journal of Control Science and Engineering
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−2
−1.5
−1
−0.50
0.5
1
1.5
2
Time (s)
x1x2
x3x4
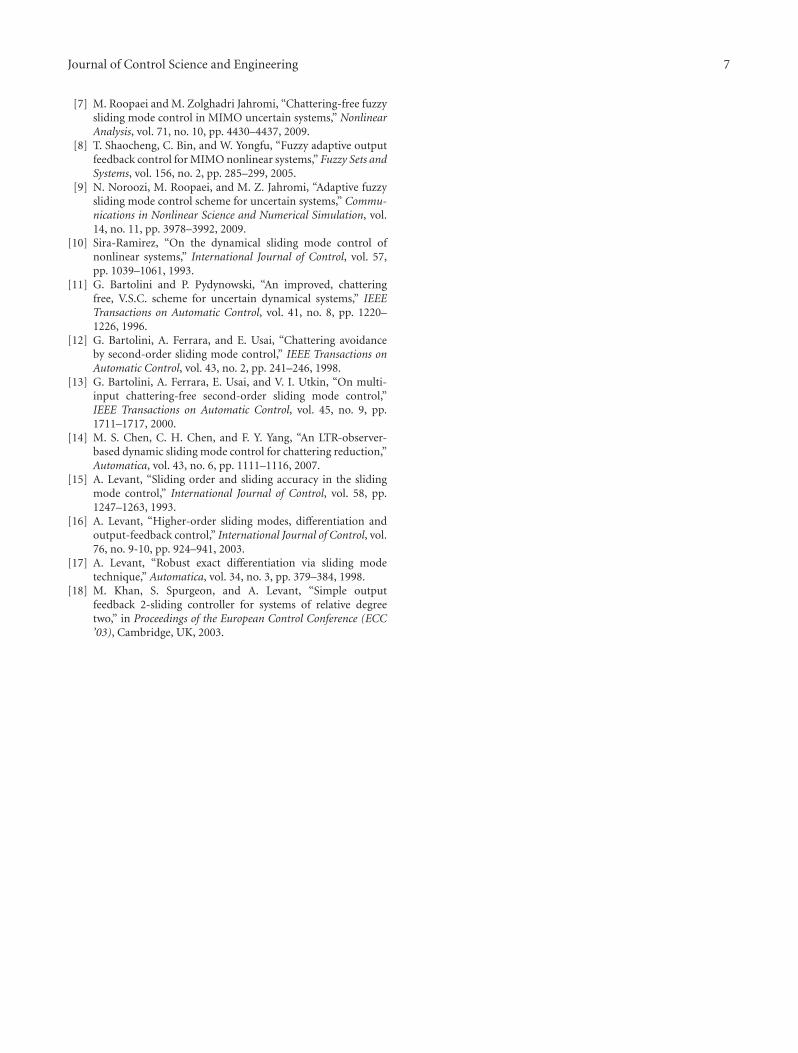
Figure 6: System states with applying the proposed method.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−3
−2
−1
0
1
2
Time (s)
u1u2
Figure 7: Control inputs with applying the proposed method.
sliding mode controller and the boundary layer controller,respectively, as
u(t) = −[−0.1108 −0.5565 −0.02 0.0934−0.6031 −0.3576 1.1415 −1.2726
]
x(t)
− 3 sign(s(t)),
u(t) = −[−0.1108 −0.5565 −0.02 0.0934−0.6031 −0.3576 1.1415 −1.2726
]
x(t)
− 3 sat(s(t), 0.05).
(32)
The control input with applying the proposed algorithm isgiven by
u(t) = −[−0.1108 −0.5565 −0.02 0.0934−0.6031 −0.3576 1.1415 −1.2726
]
x(t)
− 10s(t)− 2∫ t
0s(τ)dτ − 3
∫ t
0sign(s(τ))dτ.
(33)
Three cases are simultaneously simulated under the initialcondition x(0) = [1 2 − 2 1]T and the simulation iscarried out at a fixed step size of 1 milliseconds. The timeresponses of the system states in the three cases are shown inFigures 2, 4, and 6, respectively. As can be seen from thesefigures, the proposed method obtains the zero steady-stateerror. Figures 3, 5, and 7 show the control inputs in the three
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.2
0
0.2
0.4
0.6
0.8
Time (s)
s1s2
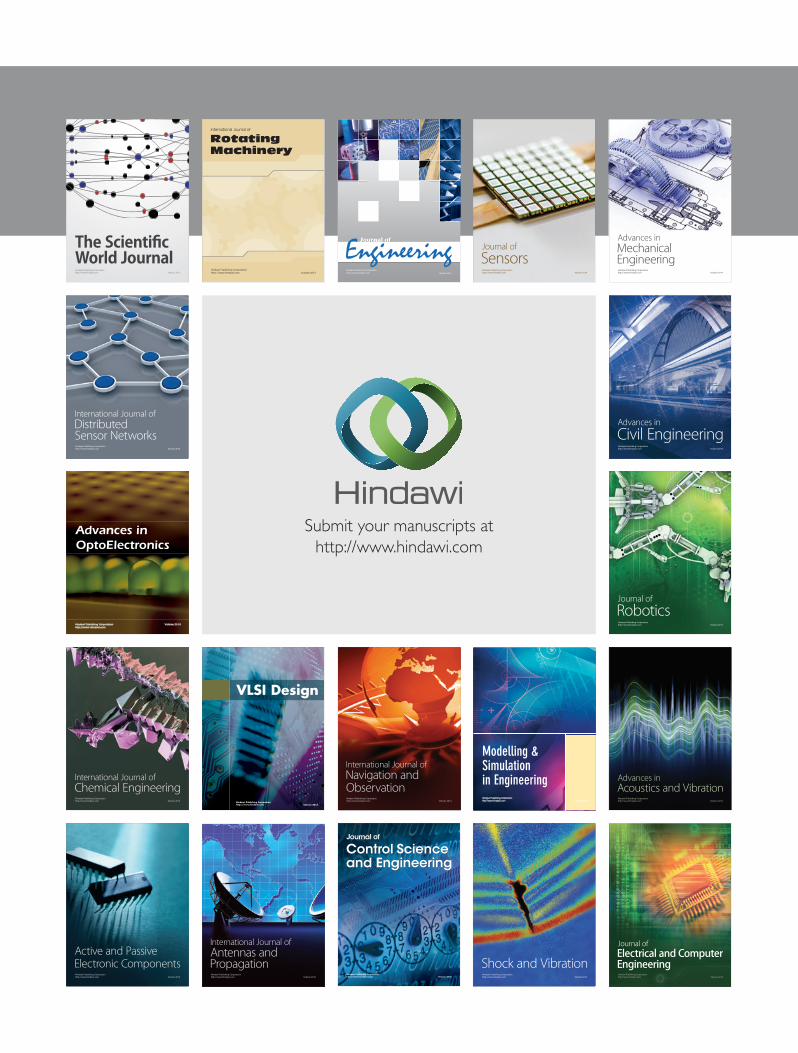
Figure 8: Sliding variables with applying the proposed method.
cases, respectively. As illustrated, our control force does notexhibit any chattering effects. The responses of the slidingvariable with applying the proposed method are given inFigure 8. It is clear from the figure that our control law canguarantee the finite time convergence to the sliding mode. Asa result, the simulation results verify the good performanceof the proposed strategy.
5. Conclusions
In this paper we have proposed a modified second-ordersliding mode control algorithm to avoid the chattering prob-lem for a MIMO uncertain system. The developed approachdoes not require the derivative of the sliding variable, thuseliminating the requirement of designing a differentiator.Under the proposed dynamic sliding mode controller, weshow that the finite time convergence to the sliding modeis guaranteed and the system states can asymptoticallyapproach to zero. Simulation results demonstrate that theproposed control scheme exhibits reasonably good systemperformance.
References
[1] C. Edwards and S. K. Spurgeon, Sliding Mode Control Theoryand Application, Taylor & Francis, London, UK, 1998.
[2] V. I. Utkin, J. Guldner, and J. Shi, Sliding Mode Control inElectro-Mechanical Systems, CRC Press, 2009.
[3] G. Bartolini, “Chattering phenomena in discontinuous con-trol systems,” International Journal of Systems Science, vol. 20,no. 12, pp. 2471–2481, 1989.
[4] J. A. Burton and A. S. I. Zinober, “Continuous approximationof variable structure control,” International Journal of SystemsScience, vol. 17, no. 6, pp. 875–885, 1986.
[5] J. J. Slotine and S. S. Sastry, “Tracking control of nonlinearsystems using sliding surface with application to robotmanipulator,” International Journal of Control, vol. 38, no. 2,pp. 931–938, 1983.
[6] L. K. Wong, F. H. F. Leung, and P. K. S. Tam, “A chatteringelimination algorithm for sliding mode control of uncertainnon-linear systems,” Mechatronics, vol. 8, no. 7, pp. 765–775,1998.
Journal of Control Science and Engineering 7
[7] M. Roopaei and M. Zolghadri Jahromi, “Chattering-free fuzzysliding mode control in MIMO uncertain systems,” NonlinearAnalysis, vol. 71, no. 10, pp. 4430–4437, 2009.
[8] T. Shaocheng, C. Bin, and W. Yongfu, “Fuzzy adaptive outputfeedback control for MIMO nonlinear systems,” Fuzzy Sets andSystems, vol. 156, no. 2, pp. 285–299, 2005.
[9] N. Noroozi, M. Roopaei, and M. Z. Jahromi, “Adaptive fuzzysliding mode control scheme for uncertain systems,” Commu-nications in Nonlinear Science and Numerical Simulation, vol.14, no. 11, pp. 3978–3992, 2009.
[10] Sira-Ramirez, “On the dynamical sliding mode control ofnonlinear systems,” International Journal of Control, vol. 57,pp. 1039–1061, 1993.
[11] G. Bartolini and P. Pydynowski, “An improved, chatteringfree, V.S.C. scheme for uncertain dynamical systems,” IEEETransactions on Automatic Control, vol. 41, no. 8, pp. 1220–1226, 1996.
[12] G. Bartolini, A. Ferrara, and E. Usai, “Chattering avoidanceby second-order sliding mode control,” IEEE Transactions onAutomatic Control, vol. 43, no. 2, pp. 241–246, 1998.
[13] G. Bartolini, A. Ferrara, E. Usai, and V. I. Utkin, “On multi-input chattering-free second-order sliding mode control,”IEEE Transactions on Automatic Control, vol. 45, no. 9, pp.1711–1717, 2000.
[14] M. S. Chen, C. H. Chen, and F. Y. Yang, “An LTR-observer-based dynamic sliding mode control for chattering reduction,”Automatica, vol. 43, no. 6, pp. 1111–1116, 2007.
[15] A. Levant, “Sliding order and sliding accuracy in the slidingmode control,” International Journal of Control, vol. 58, pp.1247–1263, 1993.
[16] A. Levant, “Higher-order sliding modes, differentiation andoutput-feedback control,” International Journal of Control, vol.76, no. 9-10, pp. 924–941, 2003.
[17] A. Levant, “Robust exact differentiation via sliding modetechnique,” Automatica, vol. 34, no. 3, pp. 379–384, 1998.
[18] M. Khan, S. Spurgeon, and A. Levant, “Simple outputfeedback 2-sliding controller for systems of relative degreetwo,” in Proceedings of the European Control Conference (ECC’03), Cambridge, UK, 2003.
Submit your manuscripts athttp://www.hindawi.com
VLSI Design
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporation http://www.hindawi.com
Journal ofEngineeringVolume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mechanical Engineering
Advances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Electrical and Computer Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Distributed Sensor Networks
International Journal of
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Modelling & Simulation in EngineeringHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Active and Passive Electronic Components
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Chemical EngineeringInternational Journal of
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Antennas andPropagation
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Navigation and Observation
International Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation http://www.hindawi.com
Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014


















