5 ProtocolManual1010 BJ
118
Model 1010A Software Protocol Manual SLIP+ Application Pack BJ 15 December 2006
-
Upload
spider15891 -
Category
Documents
-
view
216 -
download
0
Transcript of 5 ProtocolManual1010 BJ
-
8/13/2019 5 ProtocolManual1010 BJ
1/118
Model 1010A
Software Protocol Manual
SLIP+ Application Pack BJ
15 December 2006
-
8/13/2019 5 ProtocolManual1010 BJ
2/118
Model 1010A - Software Protocol Manual
Copyright Enraf Contrec 2006
The instructions given herein cover the general description, installation, operation and maintenance of the subjectequipment. Enraf Contrec reserves the right, without prior notice, to make engineering refinements that may not
be reflected in this manual.
Should any questions arise which cannot be answered specifically by this manual, they should be directed to Enraf
Contrec for further detailed information and technical assistance.
Enraf Contrec will not accept any liability for either direct or consequential damages resulting from the use or
misapplication of the contents of this manual.
Microsoft and Windows are registered trademarks of Microsoft Corporation.
Adobe and Acrobat are registered trademarks of Adobe Systems Incorporated.
Enraf Contrec22 Hall Street Hawthorn East, Melbourne 3123 AUSTRALIA
Tel: +61 3 9804 4200 Fax: +61 3 9822 8329Email: [email protected]
Website: www.contrec.com.au
Publication No:SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
3/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 i
8.0
Contents
8.1 Overview 1
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .................. 1
SLIP+ Commands ................ ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ ................. ............ 1
8.2 Frame Format 3
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .................. 3
Frame Format ................ ................ ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ................ ................ .......... 3
Address Byte ............... ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ ................. ............ 3Control Byte ............... ................ ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ............... 3
LRC ............... ................. ................. ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................... .... 5
8.3 Byte Testing 7
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .................. 7
Byte Testing ................. ................ ................ ................. ................. ................ ................ ............... ................. ................. ................ ................. ................ ................ ............... 7
8.4 Communication Procedures 9
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .................. 9Load Scheduling ............... ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ................ .................. 9
Instrument Flow Diagram ................. ................ .................. ................ ................ ................ ................ .................. ................ ................ ................. ................ 15
Remote Authorisation ............... ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ................ .............. 16
Displaying Messages and Getting Answers ................. ................ ................. ................. ................ ................. ................ ................ ........... 17
Communications Timeout ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ ................. ................ 22
Retrieval of Loading Records ................ ................. ................ ................. ................ ................ .................. ................ ................ ................ ................ ...... 22
8.5 Error Status Codes 25
Description................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ ..............
25
8.6 Commands 29
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .............. 29
Notes ............... ................. ................ ................. ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ ................. ................ 29
AA - Alter Arm Name ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ........... 30
AI - Additive Injectors ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ........... 31
AM - Arm Status .............. ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ................ .............. 32
AN - Net Accumulated Totals ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................. .. 33
AP - Additive Parameters .............. ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................. .. 34
AR - Additive Recipes ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ........... 37AS - Arm Settings ................ ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ ................. ........ 40
-
8/13/2019 5 ProtocolManual1010 BJ
4/118
8.0
ContentsSoftware Protocol Manual
ii SLIP+V3-001-SP1010A-BJ - 25/01/2006
AT - Accumulated Totals ................ ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 42
AV - Application Version ............... ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 43
BT - Batch Totals ................. ................. ................ ................ ................ .................. ................ ............... ................ ................ .................. ................ ................ .......... 44
CA - Control Arm ............... ................. ................ ................ ................ .................. ................ ............... ................ ................ .................. ................ ................ .......... 46
CC - Clear Power Cycle ............... ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 47
CM - Clear Message ............... ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 48
CP - Set or Clear PIN/Touch Numbers ............... .................. ................ ................ ................ ................ .................. ................ ................ .......... 49
DM - Display Message ............... ................. ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ .......... 50
DN - Set Arm Density ............... ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ............ 52
DP - Display Prompt .............. ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 53
ENQ - Operational State Enquiry ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ .......... 55
FR - Flow Rates ................ ................ ................ ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 59
GA - Get Answer ................. ................ ................. ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ .......... 60GC - Get Card .............. .................. ................ ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ .... 62
GD - Get Date and Time ................ ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ .... 64
GH - Get Hidden ............... ................. ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ............ 65
GK - Get Touch Key .............. ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 67
GT - Gross Totals ................ ................. ................ ................ ................ .................. ................ ............... ................ ................ .................. ................ ................ .......... 69
IA - Injector Accumulative Totals ................ ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 70
IT - Instantaneous Temperatures ............... ................ .................. ................ ................ ................. ................ ................. ................ ................. ............ 71
LT - Last Load Temperatures .............. ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 72
MI - Message Initial ................ ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 73
MR - Manager Reset .............. ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 74
NT - Net Totals ................. ................ ................ ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 75OP - Option Settings .............. ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 76
PD - Power Cycle Date and Time ............... ................ .................. ................ ................ ................ ................ .................. ................ ................ .......... 77
PR - Presets .............. ................. ................. ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ............ 78
RA - Remote Authorise ................ ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 79
RC - Compartment Response .............. ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 80
RD - Reset Date and Time ............... ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 82
RL - Load Number Response .............. ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 83
SM - Stop Arm ................ ................ ................. ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ .. 84
SO - System Options ................. ................ ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 85
ST - Send Transaction................ ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ............
86SV - Software Version ................ ................. ................ ................ .................. ................ ................ ................ ................ .................. ................ ................ .......... 88
SY - Send Entry ................ ................ ................ ................ ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 89
TC - Transaction Complete ................ ................ ................ .................. ................ ................ ................. ................. ................. ................. ................ ........... 91
TT - Terminate Transaction ................. ................ ................ .................. ................ ................ ................ ................... ................ ................ ................. ........ 92
VA - Valve Settings and Calibration ................. ................. ................ ................. ................ ................ .................. ................ ................ ............... 93
NOTES ................. ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 94
8.7 Release Notes 97
Description ................ ................. ................. ................ ................ ................ .................. ................ ................ ................. ................ ................. ................ ................. ............ 97
Changes ............... ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 97Release Date ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ................. ................. ................ ................ ....... 97
-
8/13/2019 5 ProtocolManual1010 BJ
5/118
8.0
ContentsSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 iii
8.8 Appendix - Backward Compatibility 99
Description ................. ................ ................. ................ ................. ................ ................. ............... ................ ................. ................. ................ ................ ................ .............. 99Commands ............... ................. ................ ................ ................ .................. ................ ............... ................ ................ .................. ................ ................ ................. ................ 99
DM - Display Message .............. ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ....... 100
DP - Display Prompt ................ ................ ................ .................. ................ ................ ................ ................... ................ ................ ................. ................ ........... 102
GA - Get Answer ................ ................ ................ .................. ................ ................ ................ ................. ................. ................ ................. ................ ................ ....... 104
GH - Get Hidden Answer .............. ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ............... 106
GK - Get Hidden Answer .............. ................ .................. ................ ................ ................. ................ ................. ................ ................. ................ ............... 108
SA - Send Answer ................ ................ ................ ................. ................. ................ ................ ................ .................. ................ ................ ................ ................. .... 110
-
8/13/2019 5 ProtocolManual1010 BJ
6/118
8.0
ContentsSoftware Protocol Manual
iv SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
7/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 1
8.1
Overview
Description
This manual provides the necessary information to design communications software compatible with the
Model 1010A loading system using the SLIP+ command set.
The 1010A unit communicates with a remote computer on either of two RS485/RS422/RS232 interfaces
using a baud rate of 300 to 19,200 bps, odd parity, and 8 data bits. Each of the two communication ports can
be configured with different communication parameters.
These communication parameters can be altered under the -COMMUNICATIONS- menu when the unit is
in programming mode. Refer to the Programming Manual for details.
Terminal designations and link positions for links on the S810CPU card are given in the Engineering
Manual for both the RS485, RS422 and RS232 interfaces. Since RS485 and RS422 allow multi-drop
communications one or more instruments can be connected to the RS422/485 interfaces and can be polled
by the computer.
In this document a 1010A unit is referred to as the "instrument" and the attached computer, Distributed
Control Systems (DCS) or Load Rack Computers (LRC) are referred to as the "computer".
SLIP+ Commands
This protocol manual describes a new set of commands that make up the SLIP+ interface of the 1010A
instrument. The instrument still uses the protocol called SLIP (Serial Link Interface Protocol) but uses an
altered set of commands to talk to the 1010A instrument. Some of the commands are very similar to the
older non-SLIP+ interface. The older protocol command set did not support greater than 4 arms. The newer
SLIP+ command set supports greater than 4 arms and is set up to be infinitely expandable with regard to
arm number.
The SLIP+ command set is currently supported by only the BJ application pack. Other application packs
may use the core SLIP+ command set as described here but may have addition commands added or in some
specialised applications the command format may change. If command format is changed for a specific
application then that shall be clearly stated in the accompanying software protocol manual Release Notes
for that application pack.
The core changes are to the ENQ, AT, IT, LT, NT, PR, ST, and SY commands. Most of the other commands
have retained their previous format.
In summary, the protocol remains unchanged, SLIP continues to be used. To allow for greater than 4 arm
operation the command set was changed and is not backward compatible with previous application packs.
-
8/13/2019 5 ProtocolManual1010 BJ
8/118
8.1
OverviewSoftware Protocol Manual
2 SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
9/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 3
8.2
Frame Format
Description
This section describes the framing format used to transfer commands and information between the
instrument and computer. All values shown with the suffix H are hexadecimal values.
Frame Format
All communications consists of 8-bit binary data with the frame format shown below:
Each frame is bracketed between two C0H bytes (decimal 192) and can contain a maximum number of 200
bytes.
Address Byte
The Address Byte is the second byte in a frame. It is derived by adding the instruments UNIT ADDRESS
value to 80H, providing a maximum of 32 addresses in the range 80H to 9FH. For example, an instrument
programmed with a unit address of 2 would have an address byte value of 82H. An instruments unit address
is entered in the UNIT ADDRESS parameter in the -COMMUNICATIONS- menu during programming.
When information is sent from the computer to an instrument, the Address Byte is used to direct the frame
to the desired instrument.
When information is sent from an instrument to a computer, the Address byte is used to indicate the
instrument transmitting the information.
Control Byte
The Control Byte is the third byte in the frame and should be one of the following:
C0H ADDRESS CONTROL INFORMATION LRC C0H
Control Byte HEX Value Description
ENQ 05H Used by the computer to poll the instruments.
STX 02H Used to indicate that the information field contains data.
ACK 06H Used by the instrument to indicate that a received frame is valid.
NAK 15H Used by the instrument to indicate that a received frame is not valid.
EOT 04H Used by the computer to indicate the end of transmission.
-
8/13/2019 5 ProtocolManual1010 BJ
10/118
8.2
Frame FormatSoftware Protocol Manual
4 SLIP+V3-001-SP1010A-BJ - 25/01/2006
An example of each of the ENQ (Enquiry), ACK (Acknowledge) and NAK (Negative Acknowledge)
frames are shown below. The address byte used in each frame is 81H.
ENQ - C0H 81H 05H 84H C0H
ACK - C0H 81H 06H 87H C0H
NAK - C0H 81H 15H 94H C0H
Information Field
1. The information field is an optional field and is only present when the STX control byte is used.
2. The general format for the information field is shown below:
3. The terminating byte ETX (03H) indicates the end of the information field. Alternatively, the byte
ETB (17H) indicates the end of the information field, with more information to follow in the next
frame.
4. The information field should contain a two byte alphanumeric command and an arbitrary number of
data fields.
5. The information in the command and data fields should be in the ASCII range of values 20H through
to 7FH.
6. The command and data fields are separated from each other by a NULL (0H) character.
Examples of Information Fields
Note: For ease of identification, each field within the information field has been defined by enclosure in
square brackets. The 0 between each field is the null character (0x00).
The frames below show the complete transmission frame for the two previous examples. The address byteused in each frame is 0x81.
The line below shows the complete frame, in hexadecimal values, transmitted to an instrument to send
transaction number 123. The line below that shows the ASCII characters, where possible, of the same frame.
The line below shows the complete frame, in hexadecimal values, transmitted to an instrument to send
accumulated totals. The line below that shows the ASCII characters, where possible, of the same frame.
COMMAND 0H Data Field 1 0H Data Field 2 0H ETX
Information Field Description
[ST] 0 [123] 0 [ETX] Send Transaction Number 123
[AT] 0 [ETX] Send Accumulated Totals
C0H 81H 02H 53H 54H 00H 31H 32H 33H 00H 03H B7H C0H
address STX S T null 1 2 3 null ETX
C0H 81H 02H 53H 54H 00H 31H 95H C0H
address STX A T null ETX
-
8/13/2019 5 ProtocolManual1010 BJ
11/118
8.2
Frame FormatSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 5
LRC
1. Longitudinal Redundancy Checksum (LRC) byte should be equal to the Exclusive OR (XOR) of ALLthe bytes in the packet, excluding the (C0H) brackets and the LRC byte. It includes the address byte,
the control byte and all bytes in the information fields, if there are information fields in the frame.
2. The LRC register should be set to 0 at the beginning of each frame.
3. The LRC should be derived by the transmitting unit and then sent to the receiving unit.
4. The receiving unit should, in turn, check each byte for parity, derive the LRC from the information it
has received and then compare the LRC it received to the one it derived.
5. Once the correct closing C0H bracket has been received, the frame is deemed to be either correct or
incorrect and one of the following conditions would arise:
The following conditions should be met in order for a frame to be acceptable:
All bytes (including the frame bracketing bytes) should pass the parity check.
The address byte should match the units address.
The derived LRC should match the one received.
The two byte command within any information field should be valid for the unit addressed (must beone of the commands described in the Commands section of this manual).
A valid end of frame bracket should be received within 200ms after the opening bracket.
Receiving Unit Frame Correct Frame IncorrectInstrument Send data, if command calls for data to be sent,
else send ACK, NAK or BS.
Do Nothing
Computer Send next command or EOT Repeat Command
-
8/13/2019 5 ProtocolManual1010 BJ
12/118
8.2
Frame FormatSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 6
-
8/13/2019 5 ProtocolManual1010 BJ
13/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 7
8.3
Byte Testing
Description
This procedure sets out the steps necessary to ensure that Frames are always correctly received.
Byte Testing
The communication protocol is a very simple technique for sending data across ordinary asynchronous lines
(e.g. modems).
Each frame is preceded and followed by a special FEND (frame end) character, C0H. The reason for bothpreceding and ending frames with FENDs is to improve performance when there is noise on the
asynchronous line. The FEND at the beginning of a frame serves to "flush out" any accumulated garbage
into a separate frame (which will be discarded by the upper layer protocol) instead of appending into an
otherwise good frame. Note that, two FEND characters in a row should not be interpreted as delimiting an
empty frame.
As frames are sent in 8-bit binary, if a FEND ever appears in the data, it is translated into the two byte
sequence FESC TFEND (a frame escape byte and a transposed frame end byte), before transmission.
Likewise, if the FESC character ever appears in the user data, it is replaced with the two character sequence
FESC TFESC (a frame escape byte and a transposed frame escape byte), before transmission.
As characters arrive at the receiver, they are appended to a buffer containing the current frame. Receiving
a FEND marks the end of the current frame. Receipt of a FESC puts the receiver into "escaped mode" which
causes the receiver to translate a following TFESC or TFEND back to FESC or FEND, respectively, before
adding it to the receive buffer and leaving escaped mode. (Receipt of any character other than TFESC or
TFEND while in escaped mode is an error; no action is taken and frame assembly continues. A TFEND or
TESC received while not in escaped mode is treated as an ordinary data character.)
This procedure may seem somewhat complicated, but it is easy to implement and recovers quickly from
errors. In particular, the FEND character is never sent over the channel except as an actual end-of-frame
indication. This ensures that any intact frame (properly delimited by FEND characters) will always be
received properly regardless of the starting state of the receiver or corruption of the preceding frame.
The special characters used are:
FEND (frame end) C0 (hex)
FESC (frame escape) DB (hex)
TFEND (transposed frame end) DC (hex)
TFESC (transposed f rame
escape)
DD (hex)
-
8/13/2019 5 ProtocolManual1010 BJ
14/118
8.3
Byte TestingSoftware Protocol Manual
8 SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
15/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 9
8.4
Communication Procedures
Description
All communications with the instrument are under control of the computer. The instrument does not initiate
any communications with the computer. It only responds to requests and commands from the computer. If
the instrument detects any parity error or LRC error on any incoming command, the command will be
ignored and no response will be sent from the instrument. The enquiry command (ENQ) will provide the
instrument status needed to determine computer program flow.
Commands from the computer can be received via either the Main or Auxiliary communications port. See
Programming Manual, section -COMMUNICATIONS- for more details on enabling communications.
Once a command is sent to the instrument, the computer should wait for a period of 300 milliseconds to
allow the instrument time to respond. If there is no reply from the instrument, the command should be sent
again and another timeout period of 300 milliseconds recommenced. We would suggest that a minimum of
four retries be sent before any decision is made on alternative programming strategies.
Some commands require an extended wait period of 3 to 5 seconds. An example is the AP command when
used to download information to the instrument. The instrument must update the non-volatile memory as
part of the command operation, during this time the instrument cannot respond to any other command until
it has completed the memory update. This is why these commands can only be used while the instrument is
in the idle state. These commands all still respond with an acknowledge within the extra wait period. Other
similar commands include AA, AR, DN, IA, RD, SE, and VS. Any other commands sent during this extra
wait period will be ignored.
Depending on the current status of the instrument, some commands may not be executed and will then return
a busy (BS) response to the computer. An example of such commands are the RD (Reset Date and Time),
ST (Send Transaction), and SY (Send Entry).
A detailed list of commands is presented in Commands on page 29.
Load Scheduling
A load schedule is a list of quantities of different products to be loaded into the compartments of a particular
tanker truck, by a particular driver. To distinguish orders which may have the same driver and truck, each
load has a unique load number. The load schedule is entered on the host computer connected to theinstrument, prior to the tanker arriving at the loading facility. Load scheduling involves retrieving
information from the instrument operator, verifying if this data constitutes a valid load and if so, sending
the required compartment load quantities to the instrument.
Generally load verification involves:
1. Load number, driver and truck verification.
2. Product and compartment verification.
To perform load scheduling, load scheduling must be enabled under the -COMMUNICATIONS-
configuration menu, see the Programming Manual for more details.
-
8/13/2019 5 ProtocolManual1010 BJ
16/118
8.4
Communication ProceduresSoftware Protocol Manual
10 SLIP+V3-001-SP1010A-BJ - 25/01/2006
The instrument and the computer will use three commands to exchange the required information and a
fourth to complete the transaction. These first three commands are the enquiry (ENQ), request for load (RL)
and request for compartment (RC). Load number, driver and truck verification are performed using the (RL)
command, while product and compartment verification is performed using the (RC) command. The fourth
command is the transaction complete (TC) command, it is used to tell the instrument that the loading
process has completed.
The instrument response to the ENQ command depends upon what section of the instruments program is
executing when it receives the ENQ command, and the configuration of the instrument. Valid responses to
the ENQ command are SS (Send Status), RL (Request for Load), RC (Request for Compartment), DM
(Display Message), DP (Display Prompt), MT (Message Taken), GA (Get Answer), GH (Get HiddenAnswer), GK (Waiting for Touch Key), KA (Touch Key Read) PL (Post Loading Status) and AA (Answer
Available).
All of the above responses include the current instrument status, status of the gantry arms, last transaction
number, first arm number and the number of arms. See ENQ - Operational State Enquiry on page 55for
more detail.
The instrument will respond with an SS (System Status) response if none of the other responses are
applicable, I.e. if the instrument is not requesting load or compartment authorisation, it is not displaying a
message or getting an answer from the operator, and a message has not been taken or an answer is not
available).
The instrument will respond with a different Command Field if any other response is valid, I.e. if the
instruments requesting a load or compartment authorisation. See Command Fields on page 56for more
details.
The current status of the Instrument can be determined by examining the value of the status byte of
parameter a in the SS response. The status can have a value from 0 to 255 (ie. 8 bits, with each bit
representing an off/on state for up to 8 parameters). For example, bit 7 indicates whether the instrument is
in the idle state, 0 indicating that the instrument is in the idle state, 1 indicating the instrument is no longer
in the idle state.
The current state of up to four loading arms can be determined by examining the value of the arm status
bytes, parameters e & f in the SS response. The arm status parameters (eArms 1 & 2, farms 3 & 4)
can have a value from 0 to 255 (ie. 8 bits, with each bit representing an off/on state for up to 8 parameters).For example, bit 7 of parameter e indicates whether arm 1 of the instrument is presently loading, 0
indicating that the arm is presently not loading, 1 indicating the instrument is currently loading.
For any of the above parameters, an used bit will be set to 0 by default.
In conclusion the response to the ENQ command is used to determine the present state of the instrument.
Once this has been determined the appropriate action can be taken.
-
8/13/2019 5 ProtocolManual1010 BJ
17/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 11
Load Scheduling - Sequence of Events
Load Scheduling begins with the computer monitoring the instrument status using the ENQ command. Theinstrument always begins from the idle state. While in the idle state the computer may send messages to the
operator using the following commands; DM, DP, GA, GC, GH, and GK. These messages can be used to
gain information about the operator/driver/truck for use in determining whether the operator has an
authorised load in the load schedule database.
The instrument moves from the idle state once the operator has responded to the initial message by either
pressing the Enter key or connecting the system permissives.
RL State
The instrument moves from the idle state once the operator has responded to the initial message by either
pressing the Enter key or connecting the system permissives. If authorisation is enabled the following
prompt will be presented to the operator.
Once the touch key or other authorisation has taken place the operator is prompted to enter a load number.
The instrument will now respond to the ENQ command with an RL (request for load authorisation). The
instrument will prompt the operator with please wait, see below. During this state the computer may send
message to the operator using the DM, DP, GA, GC, GH, and GK commands.
An RL response from the instrument to the ENQ command from the computer has five extra parameters in
addition to the instrument status, these are:
1. Load number
2. Driver index number
3. Vehicle index number
4. Driver PIN/touch key
5. Truck PIN/touch key
SYSTEM AVAILABLE
PRESS ENTER
PRESENT TRUCK
TOUCH KEY
LOAD NUMBER
> 1
PLEASE WAIT
-
8/13/2019 5 ProtocolManual1010 BJ
18/118
8.4
Communication ProceduresSoftware Protocol Manual
12 SLIP+V3-001-SP1010A-BJ - 25/01/2006
If the driver and/or truck PIN/touch key numbers are verified by the instrument, the respective driver/truckindex fields of the RL response will contain numbers of the range 1 to 500. The number corresponds to the
location in the instruments memory where the PIN or touch key number was found. The last two fields will
thus contain the actual driver and/or truck PIN/touch key numbers. This allows for remote authorisation of
the driver and/or truck. The computer should now verify if the load number, driver and truck correspond to
a load in the load schedule database.
The driver and/or truck PIN/touch key numbers are downloaded to the instrument when the instrument is in
the idle state using the CP command.
Note: Driver and/or truck authorisation can be disabled, in this case these fields will contain 0and so will the corresponding driver and/or truck PIN/touch key number fields. Only the
load number need be verified in this case. Alternatively the load number prompt can alsobe disabled, in this case the load number field will contain 0. This would require the
computer to prompt the driver for information using the messaging commands, DM, DP,
GA, GC, GH, and GK. Then verify the obtained information before authorising the load.
If any of the parameters in the RL do not constitute a valid load, the computer should send to the instrument
an RL command with the first parameter N to signify NO to the load request. The second parameter being
the reason the request for load has been refused (e.g. INVALID LOAD NO). The first 30 characters of
the reason will be displayed on the instrument. After the operator has acknowledge the reason by pressing
ENTER, the operator is then prompted to re-enter the driver and/or truck PIN/touch key numbers and/or
load number.
If the parameters in the RL request from the instrument are valid, the computer sends an RL command with
the first parameter being Y to signify YES to the load request. The second parameter being a unique
number generated by the computer that is stored in the transaction within the instrument. If the RL
command from the computer to the instrument contains the third and fourth parameters, these parameters
are the driver and truck index numbers to be stored in the transaction within the instrument. If used both the
index numbers should be greater than 500. This allows the computer to determine if the driver and/or truck
were remotely authorised. This is because the driver and/or truck PIN/touch key numbers verified inside the
instrument will have index numbers in the range 1 to 500.
RC State
If the load is verified by the computer, as indicated by an affirmative RL command, the instrument prompts
the operator to enter an arm number to from which loading will commence.
If a valid arm number has been entered the instrument then prompts the operator to enter the compartment
which that arm is to be used to fill.
SELECT ARM
(1-4) > 1
COMPARTMENT NUMBER
> 1
-
8/13/2019 5 ProtocolManual1010 BJ
19/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 13
After the arm and compartment numbers have been entered, the instrument will reply with an RC (requestfor compartment authorisation) response to the next ENQ command from the computer. The instrument will
prompt the operator with please wait, see below. During this state the computer may send message to the
operator using the DM, DP, GA, GC, GH, and GK commands.
An RC response from the instrument to the ENQ command from the computer has four extra parameters in
addition to the instrument status, these are:
1. Load number
2. Arm number
3. Compartment number
4. Returned quantity
The computer should now check that the specified loading arm and compartment number match in the load
schedule database. If this is correct, the computer should send a RC command to the instrument with the
first parameter Y to signify YES to the compartment request. The second parameter is the preset quantity
to be loaded, and the third parameter is the maximum quantity that the operator can select as a preset.
If the ask preset prompt has been disabled the third parameter is ignored. The second parameter is used as
the preset for the load and the operator cannot change the preset amount.
Note: The second and third parameters of the RC Y response cannot exceed the maximumpreset value programmed into the instrument. If they do exceed this value they will be
ignored and the maximum preset value used in their place. See Programming Manual,
section 6.7, OPTIONS for details.
If any of the parameters in the RC do not constitute a valid compartment, the computer should send to the
instrument an RC command with the first parameter N to signify NO to the compartment request. The
second parameter being the reason the request for load has been refused (e.g. INVALID COMP NO). The
first 30 characters of the reason will be displayed on the instrument. After the operator has acknowledge the
reason by pressing ENTER, the instrument will take action based on the third parameter. This parameter
tells the instrument to either return to the arm selection prompt, continue to the ask load another
compartment prompt, or continue to the Post loading State where the loading process completes.
If the instrument receives an affirmative RC command, the instrument will prompt the operator for the
preset quantity, displaying the preset value the computer sent in the RC command (see prompt below). This
quantity may be altered by the operator, up to a maximum value sent from the computer.
PLEASE WAIT
PRESET QUANTITY
> 7500 L
http://../6.0%20-%20Programming%20Manual/PM_Options.pdfhttp://../6.0%20-%20Programming%20Manual/PM_Options.pdf -
8/13/2019 5 ProtocolManual1010 BJ
20/118
8.4
Communication ProceduresSoftware Protocol Manual
14 SLIP+V3-001-SP1010A-BJ - 25/01/2006
If the computer sent 0 as the preset quantity in the RC command the instrument will change the preset
prompt to that shown below:
Once a valid preset has been entered by the operator the instrument will then prompt the operator to start
the load.
As further arms are started within the same load, further compartment authorisation requests from the
instrument will be made by sending an RC response to the ENQ command. See Instrument Flow Diagram
on page 15.
PL State
Once all loading has completed the instrument enters the PL state. Any final messages for the operator can
be posted using the DM, DP, GA, GC, GH, and GK commands. The instrument will prompt the operator
with please wait, see below.
Once any messaging has been completed the computer sends to the instrument the TC (Transaction
Complete) command. The instrument then moves from the PL state to the disconnect prompt if permissives
are enabled. If no permissives are enabled or they have been disconnected the instrument prompts that the
load has completed for 5 seconds before reverting to the idle state, from which a new transaction can begin.
While in the idle state the last transaction number stored in the instrument can then be compared to that
stored in the computer database. If the instrument stores higher transaction numbers than that stored in the
computer database, the computer should upload the data from the instrument using the ST (Send
Transaction). See Retrieval of Loading Records on page 22.
ENTER PRESET QUANTITY
> 0 L
PRESS START
OR CANCEL
PLEASE WAIT
-
8/13/2019 5 ProtocolManual1010 BJ
21/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 15
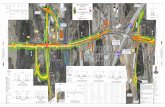
Instrument Flow Diagram
Select Arm Prompt
Load Authorised (RL Y)
Load Not Authorised
- Force Disconnect
(2)
Load Another
Compart?
Load Another
Comp Now?
NOOR Timeout OR Cancel
Program Start
Start OR Timeout OR Cancel
Start/Cancel Prompt
"LOADING COMPLETE"
Message
Idle State
Displays "SYSTEM
AVAILABLE" or
"CONNECT...."
RL State
Remote Load Authorise
Questions Asked
RC State
Remote
Compartment
Authorise
Questions
Asked
System Connected
OR Enter Pressed
Compartment
Not Authorised
Loading StateDisplays ARM status
information
Enter Preset Prompt
PL State
Post Loading
QuestionsAsked
Compartment Authorised
(RC Y)
YES
Loading
Compartment Not
Authorised
- Force Disconnect
ARM # Selected
Transaction at this
bay is Complete
YES
Compartment Not
Authorised - Skip
load another
compart prompt
Overfill AND/OR Vapour Recovery
Permissive Disconnected
Select Compartment
Prompt
Compartment # Selected
Timeout
OR Cancel
Timeout
OR Cancel
Overfill or
Vapour Recovery
permissive
disconnected
AND
Start button
has not been
pressed
"LOADING COMPLETE
DISCONNECT"
Prompt - if configured for
permissives
Enter Load Number
Load # Entered
RC N
"Message" 1
RC N
"Message" 0
RC N
"Message" 2
RL N
"Message"
NOTES:
a) Unit must be configured for LOAD SCHEDULING mode.
b) Only prompts can Timeout OR Cancel (via operator).
c) Some states and prompts depend on how the initial message
is configured - if configured for permissives or not.
Overfill or
Vapour Recovery
disconnected
OR Timeout
OR Cancel
A Batch Completes
OR Start Butt on
pressed
YES
NOStart Button
been pressed?
Is a load in
progress?
YES
NO
Timeout
OR Cancel
Valid Preset Selected
NO OR timeout
Message times out
RL N
"Message" SLoad Not Authorised
- Skip Disconnect (Retry)
-
8/13/2019 5 ProtocolManual1010 BJ
22/118
8.4
Communication ProceduresSoftware Protocol Manual
16 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Remote Authorisation
Remote Authorisation is used to remotely authorise a driver and/or truck so that they can begin the loading
process. Remote Authorisation can involve authorising a driver, a truck or both. It can be used with any kind
of authorisation such as PIN, touch key, or card. Remote Authorisation is used primarily where there are
greater than 500 driver and/or truck PIN/touch key/card numbers, therefore they cannot all be stored within
the 1010 instrument. (The instrument can only hold 500 driver and 500 truck PIN/touch key/card numbers)
The driver and/or truck PIN/touch key/card numbers are entered into the host computer connected to the
instrument, prior to loading taking place. Remote Authorisation involves retrieving driver and/or truck
PIN/touch key/card numbers from the instrument operator, verifying if this driver and/or truck PIN/touch
key/card numbers constitutes an authorised operator and if so, sending the instrument authorisation.
Generally Remote Authorisation involves:
1. Retrieving driver and/or truck PIN/touch key/card numbers from the instrument.
2. Verifying driver and/or truck PIN/touch key/card numbers.
3. Authorising the instrument.
To perform Remote Authorisation, the instrument and the computer will use two commands to exchange
the required information. These commands are the enquiry (ENQ) and request for authorisation (RA).
Once the operator has responded to the instruments prompts by entering the PIN/touch key/card numbers
the instrument will enter the RA state. I.e. the instrument response to the ENQ command is RA (Remote
Authorisation), this indicates that the instrument is waiting for a remote authorisation from the computer.
An RA response from the instrument to the ENQ command from the computer includes four extra
parameters in addition to the instrument status parameters, these are:
1. Driver index number
2. Vehicle index number
3. Driver PIN/touch key/card number
4. Truck PIN/touch key/card number
The computer will be able to get the driver and/or truck PIN/touch key/card numbers from the ENQ
command response. The computer will then verify the numbers and send either an affirmative or negative
RA response back to the instrument.
If any of the parameters in the RA response do not constitute a valid authorisation, the computer should send
to the instrument an RA command with the first parameter N to signify NO to the remote authorisation
request. The second parameter being the reason the request for remote authorisation has been refused (e.g.
INVALID DRIVER PIN). The first 30 characters of the reason will be displayed on the instrument. Afterthe operator has acknowledge the reason by pressing ENTER, the operator is then prompted to re-enter the
driver and/or truck PIN/touch key numbers and/or load number.
If the parameters in the RA response from the instrument are valid, the computer sends an RA command
with the first parameter being Y to signify YES to the remote authorisation request. The second and third
parameters being the driver and truck index numbers respectively that are to be stored in the transaction
within the instrument.
After the instrument receives an affirmative remote authorisation, it will then prompt for load number (if
enabled), and then go to RL state (if Load Scheduling is enabled).
-
8/13/2019 5 ProtocolManual1010 BJ
23/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 17
Note: Driver and/or truck authorisation must be enabled under the SYSTEM configuration menu before
remote authorisation is enabled under the COMMUNICATIONS configuration menu. When remote
authorisation is enabled the COMMS TIMEOUT is automatically enabled. This timeout is the timeallowed for the instrument to detect computer communications before a communications timeout error
is reported. For example, if the instrument is sitting in the idle state and does not receive any computer
communications within the timeout period an error will be displayed to the operator. As soon as
communications are restored the error is cleared.
Displaying Messages and Getting Answers
Developers writing a communications interface to the 1010 may require additional messages to be sent to
the operator, and subsequent responses from the operator. Several commands (DM, DP, GA, GC, GH, and
GK) involve sending text messages to the instrument display to inform or prompt the operator.
Typically the commands have the following structure:
Control Byte Information Fields
STX [DM] 0 [a] 0 [b] 0 [c] 0 [d] ... [h] 0 [ETX]
where
a = line 1 (top line) [justify character& message]
b = line 2 [justify character& message]
c = line 3 [justify character& message]
d = line 4 [justify character& message]
e = line 5 [justify character& message]
f = line 6 [justify character& message]
g = line 7 [justify character& message]
h = line 8 (bottom line) [justify character& message]
justify characteroptions:
| centre justified (vertical bar, 7EH)
or _ left justified (underscore, 5FH)
or + right justified (plus sign, 2BH)or a number between 0 and 30 in the justify field will justify the text that
number of spaces from the left (must be two characters, ie 03 for 3 spaces)
messageoptions:
-1 leave line as is (if previous message still being displayed)
or -2 clear line (if previous message still being displayed)
or up to 30 characters of text (in addition to thejustify character)
-
8/13/2019 5 ProtocolManual1010 BJ
24/118
8.4
Communication ProceduresSoftware Protocol Manual
18 SLIP+V3-001-SP1010A-BJ - 25/01/2006
The instrument has a 8 line x 30 character display. Up to 8 lines can be displayed, however, due to the factthat the meter totals have to remain on the screen at most times this is not always possible. Therefore the
only time a full screen message (a message of up to 8 lines) can be displayed is during the idle, RL or RA
states. If in Load Scheduling mode messages can only be displayed during the idle, RA, RC, and PL states.
Only two line messages can be displayed during the RC and PL states. These two line messages are
displayed on the bottom two lines on the 8 x 30 display. All two line message should contain either -1 or
-2 for the first six line parameters.
The commands all have a similar structure and involve the use of a Justification Character to set the spacing
on each of 8 lines of text. The Justify Character is the first character of each parameter of the command.
If sending a message while the instrument is in the idle state, you can send either a two line message or a
full screen message.
To display a two line message to the operator (ignoring the field separator nulls):
This results in the following being displayed:
DM -2 -2 -2 -2 -2 -2 |PLEASE WAIT -2 ETX
ARM 1 l i t r e ARM 2 l i t r e
ARM 3 l i t r e ARM 4 l i t r e
PLEASE WAIT
-
8/13/2019 5 ProtocolManual1010 BJ
25/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 19
To display a full screen message to the operator (ignoring the field separator nulls):
This results in the following being displayed:
The instrument is able to determine a two line message by checking the first six line parameters to see that
they are all either -1 or -2. If any of these first six message parameters is not a -1 or -2 then the
instrument will assume that you wish to display a full screen message and will clear the meters from the
screen and display the message.
Once messaging has started with either full screen or two line it is suggested to continue with the same type
of messaging until complete. Otherwise the screen will be cleared each time a full screen message is placed
after a two line message slowing down prompting to the screen.
It is suggest not to use the CM command after each message has been displayed as this will clear the screen
and re-display the meter totals which takes extra time and will result in poor useability. Instead it is
suggested to use one message command directly after the other, for example a DM command then
immediately the GA command. This also allows for creative interfaces such as scrolling menus, see
Messaging Commandsfor more details. Therefore the CM command should only be used once all
messaging has been completed to return the instrument to its original state.
Note: The Justify Character must always be entered otherwise the first character of the line of
text will be taken as the Justify Character and it will not be displayed.
DM -2 -2 |CONTREC -2 -2 -2 |PLEASE WAIT -2 ETX
CONTREC
PLEASE WAIT
-
8/13/2019 5 ProtocolManual1010 BJ
26/118
8.4
Communication ProceduresSoftware Protocol Manual
20 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Messaging Commands
To display a message to the operator with out any response, such as BAY CLOSED, the DM command
is used. The message can either be cleared by the computer by using the CM command or any other message
command can be sent to replace the displayed message.
The DP command requires a response from an operator by pressing the ENTER/YES key. The message can
either be cleared by the computer by using the CM command or any other message command can be sent
to replace the DP. If after an automatic timeout period sent as part of the DP command the message will
automatically be cleared.
After the instrument has received the DM or DP command, the instrument response to the ENQ command
will be DM or DP respectively. After the operator has acknowledged a DP command by pressing the
ENTER/YES key, the instrument display will show 'PLEASE WAIT', and the response to the ENQ
command from the computer will now be MT (message taken). The host computer knowing the state of the
instrument from the ENQ response can then return the instrument to its normal operating mode by sending
a CM command or continue with other messages as required.
To get an answer from the instrument operator in the form of data, the GA, GC, GH, or GK commands are
used. For example if using the GA command to get a response form the operator: The operator must answer
the displayed question by either entering a number and pressing ENTER, or by pressing the YES, NO,
DISPLAY, ALPHA/LINE, STOP or START keys. After the instrument has received the GA command, the
instrument response to the ENQ command will be GA. After the operator has answered the message, the
instrument will display the answer and the message 'PLEASE WAIT'. The instrument response to the ENQ
command from the computer will now be AA (Answer Available). The answer is returned as the last
parameter in the AA ENQ response.
To retrieve a PIN or Password GH is used to hide the operators response. If a touch key or swipe card is
fitted to the instrument then the following commands may be available, GK (Get Touch Key) and GC (Get
Swipe Card). These commands allow a message to be displayed, prompting the operator to touch their key
or swipe their card.
ENQ response after a message has been acknowledge by the operator:
After using either the DM, DP, GA, GC, GH or GK commands, the instrument can be returned to its original
display with the CM command. The DM, DP, GA, GC, GH & GK commands must be used carefully,
otherwise the operator may become confused.
These commands can only be used for full screen messaging when the instrument is in the idle, RL or RA
states. The RL and RA states requiring Load Scheduling and Remote Authorise respectively to be enabled.
DM (Display Message) DP (Display Prompt) GC (Get Swipe Card)
GA (Get Answer) GH (Get Hidden Answer) GK (Get Touch Key)
SA (Send Answer) CM (Clear Message)
M T ( Me ss ag e T ak en ) A A ( An sw er A va il ab le ) C A ( Sw ip e C ar d A va il ab le )KA (Touch Key Answer
Available)
-
8/13/2019 5 ProtocolManual1010 BJ
27/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 21
Simple scrolling menu example using the GA command
To display a full screen message containing a scrolling menu (ignoring the field separator nulls):
The ENQ response changes from SS to GA. The following is displayed:
The operator presses the DISPLAY key and the ENQ response changes from GA to AA with the last
parameter indicating the key that was pressed, a D in this case.
The computer can now display second menu page to the operator (ignoring the field separator nulls):
The ENQ response changes from AA to GA. The following is displayed:
If complete the screen can be cleared using the CM command.
GA |ITEM 1 -2 |ITEM 2 -2 |ITEM 3 -2 |PRESS DISPLAY TO SCROLL -2 ETX
ITEM 1
ITEM 2
ITEM 3
PRESS DISPLAY TO SCROLL
DM |ITEM 4 -2 |ITEM 5 -2 |ITEM 6 -2 |PRESS DISPLAY TO SCROLL -2 ETX
ITEM 4
ITEM 5
ITEM 6
PRESS DISPLAY TO SCROLL
-
8/13/2019 5 ProtocolManual1010 BJ
28/118
8.4
Communication ProceduresSoftware Protocol Manual
22 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Communications Timeout
When either Load Scheduling and/or Remote Mode are selected, the instrument automatically enables the
COMMS TIMEOUT function. This function sets the amount of time that the instrument will allows
without communications from the host. This timeout period can be altered from the -COMMUNCATIONS-
menu (See the Programming Manual).
Once this timeout period has elapsed the instrument assumes that communications have failed and allows
any load currently in progress to complete before forcing the operator to the disconnect prompt. It then
displays a Communcations failure error message until communications are restored.
Retrieval of Loading Records
ST (Send Transaction)
SY (Send Entry)
Loading data for each truck is stored in two sections in the instruments. The two sections are called
TRANSACTION and ENTRY. The transaction contains information about the load that is common to all
the compartments loaded, eg driver, truck, date, start time, load number etc. The entry data contains
information for each compartment/batch that the instrument has attempted to load, eg compartment number,
arm number, preset quantity, gross loaded etc.
The instrument stores the last 200 transactions in battery backed memory. If the computer database is
destroyed or cleared, the last 200 transactions can be read from the instrument. There is no restriction on the
order in which transactions or entries must be uploaded. Each transaction records the number of entries
associated with it, by storing the first entry and the last entry in the entry start and entry stop fields of the
transaction. Each entry records the transaction with which it is associated by storing the transaction number
in its transaction number field. Entries are stored in a circular buffer, 1400 entries long. The entries are
numbered 0 to 1399 inclusive.
When a transaction is uploaded to the computer, the entry start and entry stop fields should be examined to
determine which entries should be uploaded from the instrument. If the transaction has an entry start value
of 1398 and an entry stop value of 1, the entry numbers associated with the transaction are 1398, 1399, 0
and 1.
Programming tip for C programmers:
/* if entry_start = 1398 and entry_stop = 1, add 1400 to entry_stop*/ if (entry_stop < entry_start)
entry_stop += 1400;
/* When requesting entries from the 1010, use the modulus operator with
1400 to request the entry. */
for (i=entry_start; i
-
8/13/2019 5 ProtocolManual1010 BJ
29/118
8.4
Communication ProceduresSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 23
Retrieval of Batch Records During the Loading Process
It is recognised that from time to time entry/batch information is required before the load operation iscomplete. Because the ST and SY commands can only be used while the instrument is in the idle state, the
BT command must be utilised during the loading process to obtain entry/batch information.
The computer must monitor the loading process via the ENQ command. Once it is established that a
particular batch has completed (arm completed bit set - See Arm Status Byte (applies to all arm status
bytes) on page 57.) the BT command can then be used to obtain the batch information. The BT command
is not available while a batch is in progress.
-
8/13/2019 5 ProtocolManual1010 BJ
30/118
8.4
Communication ProceduresSoftware Protocol Manual
24 SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
31/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 25
8.5
Error Status Codes
Description
When an instrument detects an external error or fault condition, the error code for that condition is recorded
in the entry segment of the transaction file.
The following Error Status codes are valid for the 1010A- unit.
Error Status 1 - ESD/Emergency Stop
This error is recorded if the emergency stop signal is detected by the instrument. All arms are stopped and
the unit is disabled from further use until restored by a manager reset (MR). The MR bit in the ENQ command
will also be set indicating that a MR is required.
Error Status 2 - Overfill Disconnected
This error is recorded if the overfill has been disconnected or tripped, and has not been reconnected or cleared
within the programmed Clear/Reconnect time. All current batches in progress are terminated.
Error Status 3 - Vapour Recovery Disconnected
This error is recorded if the vapour recovery hose has been disconnected from its coupling and has not been
reconnected within the programmed Clear/Reconnect time. All current batches in progress are terminated.
Error Status 4- Flowmeter ErrorThis error is recorded when a flowmeter pulse error is detected on an arm during a batch. The instrument must
be configured for a dual pulse flowmeter. The batch will be terminated.
Error Status 5- Flowmeter Timeout
This error is recorded if there is an absence of flowmeter pulses for a time exceeding the no flow timeout
period during a load. The batch will be terminated.
Error Status Codes(*MA unit only)
0 - No Error 7 - Valve Fault 14 - No Additive
1 - ESD/Emergency Stop 8 - Deadman Timeout 15 - Remote Stop2 - Overfill Disconnected 9 - Expansion Comms Timeout* 16 - LCD Failure
3 - Vapour Rec. Disconnected 10 - Power Failure 17 - Phase Error
4 - Flowmeter Error 11 - High Additive
5 - Flowmeter Timeout 12 - Low Additive 99 - Transaction File in use
6 - Temperature Fault 13 - Additive Comms 100 - Illegal Flow
-
8/13/2019 5 ProtocolManual1010 BJ
32/118
8.5
Error Status CodesSoftware Protocol Manual
26 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Error Status 6- Temperature Fault
This error is recorded when a temperature sensor fault is detected on an arm during a batch. The batch will
be terminated and an error recorded. This disables the arm from further use, and requires a manager reset
(MR) to re-enable the arm. The MR bit in the ENQ command will also be set indicating that a MR is required.
Error Status 7- Valve Fault
This error is recorded at the completion of a batch when the flowrate is outside the deadband limit during
prestop. No batch termination.
Error Status 8- Deadman Timeout
This error is recorded and all batches are cancelled when the operator has not pressed any key for five minutes
since starting a load. Typically, an external reminder indicator would have been activated after 2 minutes.
All loads are paused when the operator has not pressed any key for three minutes since starting a load. Only
after the 5 minutes without any key presses is this error recorded and the transaction terminated.
Error Status 9- Expansion Comms Timeout
This error is recorded when the expansion communications between a unit and modules fails during a batch.
The transaction is terminated and the fault must be fixed before the unit can be used again.
Error Status 10- Power Failure
This error is recorded when the instrument detected a power failure during loading.
Error Status 11- High Additive
This error is recorded when an attached Model 1020 additive injection controller cannot slow down the
additive delivery for an additive injector during a batch. The batch is terminated.
Error Status 12- Low Additive
This error is recorded when an attached Model 1020 additive injection controller cannot deliver enough
additive for an additive injector during a batch. The batch is terminated.
Error Status 13- Additive Comms
This error is recorded when communications with an attached Model 1020 additive injection controllers fails,
and all active arms are stopped. The transaction is terminated.
Error Status 14- No Additive
This error is recorded when an attached Model 1020 additive injection controller detects no additive flow for
an additive injector during a batch. The batch is terminated.
Error Status 15- Remote Stop
This error is recorded when a valid external remote stop (SM command) is received by the instrument. The
specified batch (indicated by arm number) is terminated.
-
8/13/2019 5 ProtocolManual1010 BJ
33/118
8.5
Error Status CodesSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 27
Error Status 16- LCD Failure
This error is recorded when a LCD failure is detected on the graphic display. The batch will be terminatedand the instrument restarted. On restart a warning message will be displayed.
Error Status 17- Phase Error
This error is recorded when a flowmeter phase error is detected on an arm during a batch. The instrument
must be configured for a dual pulse flowmeter. The batch will be terminated.
Error Status 99 - Transaction File in use
This error is recorded when either the transaction and/or entry are not completed successfully or there has
been an attempted access of the transaction file using the BT command while the transaction and/or entry are
still being written to/used internally by the instrument.
Error Status 100 - Illegal Flow
This error is recorded when an unauthorised flow has been detected. A new entry and/or transaction is created
to record the event.
-
8/13/2019 5 ProtocolManual1010 BJ
34/118
8.5
Error Status CodesSoftware Protocol Manual
28 SLIP+V3-001-SP1010A-BJ - 25/01/2006
-
8/13/2019 5 ProtocolManual1010 BJ
35/118
SLIP+V3-001-SP1010A-BJ - 25/01/2006 29
8.6
Commands
Description
The following section describes the command format for the 1010A-BJ instrument or instrument
compatible with the Model 1010A loading system using the SLIP+ command set. For other instruments
please refer to the appropriate software protocol manual.
Notes
The two byte command within any information field should be valid for the unit addressed (must be
one of the commands described in this section of this manual). Otherwise the unit being address will
not respond (not even with a NAK response).
For backward compatibility purposes, allowances should be made for extra parameters to be added
to a command in the future.
For backward compatibility purposes, allowances should be made for extra characters to be added
to parameters.For backward compatibility purposes, the instrument supports the use of the older DM,
DP, GH, and GK commands. See the Appendix for details.
-
8/13/2019 5 ProtocolManual1010 BJ
36/118
8.6 AA - Alter Arm Name
CommandsSoftware Protocol Manual
30 SLIP+V3-001-SP1010A-BJ - 25/01/2006
AA - Alter Arm Name
Description
Remotely set the load arm name to be displayed on the instrument.
Send
Receive
Notes
The arm name can also be edited from within the arm configuration menu.
Related Commands
None.
Constraints
Instrument must be in the idle state.
This command requires extra time as the instrument must update the non-volatile memory. A minimumof 3 extra seconds should be allowed for both waiting for an acknowledge (ACK) response and before
another command is sent to the instrument.
Control Byte Information Fields
STX [AA] 0 [a] 0 [b] 0 [ETX]
where
a = arm number [x]
b = arm name [xxxxxxxx]
Control Byte Information Fields
ACK
NAK If the requested arm number does not exist
If the number of parameters is less than 2
If the number of characters within parameter b exceeds 8
-
8/13/2019 5 ProtocolManual1010 BJ
37/118
AI - Additive Injectors 8.6
CommandsSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 31
AI - Additive Injectors
Description
Returns the additive parameter settings for the particular 1010 unit being addressed.
Send
Receive
Notes
None
Related Commands
AP, AS.
Constraints
Instrument must be in the idle state.
Control Byte Information Fields
STX [AI] 0 [ETX]
Control Byte Information Fields
STX [AI] 0 [a] 0 [b] 0 [c] 0 [d] 0 [e] 0 [ETX]
where
a = additive injection type [INTELLIGENT]
b = missed batches count [xx]
c = additive batch timeout [xx] in seconds
d = no. of Model 1020 additive injectors [x]
e = additive pump start [BY LOAD-ALL] or [BY COMP-AS.REQ]
OR
[AI] 0 [a] 0 [b] 0 [ETX]
where
STX
a = additive injection type [OPEN COLLECTOR] or [110/240 VOLT]
b = additive pulse width time [xx.x]
OR
[AI] 0 [a] 0 [ETX]
where
STX
a = additive injection type [NONE]
-
8/13/2019 5 ProtocolManual1010 BJ
38/118
8.6 AM - Arm Status
CommandsSoftware Protocol Manual
32 SLIP+V3-001-SP1010A-BJ - 25/01/2006
AM - Arm Status
Description
Allows the host to obtain the status of a particular arm.
Send
Receive
Notes
Arm Status byte: 0 = DISABLED, 1 = ENABLED, 2 = FAULTY
Related Commands
CA
Constraints
The error status indicates the previous batch error status for a particular arm only. Only when a new batch
on that particular arm completes does the error status get updated.
Control Byte Information Fields
STX [AM] 0 [a] 0 [ETX]
where
a = arm number [x]
Control Byte Information Fields
STX [AM] 0 [a] 0 [b] 0 [ETX]
where
a = arm status [x]
b = error status [xx]
NAK If the requested arm number does not exist
Error Status Codes
0 - No Error 7 - Valve Fault 14 - No Additive
1 - ESD/Emergency Stop 8 - Deadman Timeout 15 - Remote Stop
2 - Overfill Disconnected 9 - Not used 16 - LCD Failure
3 - Vapour Rec. Disconnected 10 - Power Failure 17 - Phase Error
4 - Flowmeter Error 11 - High Additive
5 - Flowmeter Timeout 12 - Low Additive 99 - Transaction File in use
6 - Temperature Fault 13 - Additive Comms 100 - Illegal Flow
-
8/13/2019 5 ProtocolManual1010 BJ
39/118
AN - Net Accumulated Totals 8.6
CommandsSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 33
AN - Net Accumulated Totals
Description
Returns the net accumulative total for all arms.
Send
Receive
Notes
Parameter b indicates how many net accum. total parameters follow. For example, if b = 2 then only
parameters [a] through [e] are received.
Related Commands
AT, FR, GT, IT, LT, NT, PR.
Constraints
None.
Control Byte Information Fields
STX [AN] 0 [ETX]
Control Byte Information Fields
STX [AN] 0 [a] 0 [b] 0 [c] 0 [d] ... [g] 0 [ETX]
where
a = first arm number [x]
b = number of arms [x]
c = bay number [xx]
d = net accum. total for first arm [xxxxxxxx]
e = net accum. total for second arm [xxxxxxxx] (if number of arms > 1)
f = net accum. total for third arm [xxxxxxxx] (if number of arms > 2)
g = net accum. total for fourth arm [xxxxxxxx] (if number of arms > 3)
-
8/13/2019 5 ProtocolManual1010 BJ
40/118
8.6 AP - Additive Parameters
CommandsSoftware Protocol Manual
34 SLIP+V3-001-SP1010A-BJ - 25/01/2006
AP - Additive Parameters
Description
Upload or download the additive parameters for the requested model 1020 additive injector.
Send (Upload)
Receive (Upload)
Control Byte Information Fields
STX [AP] 0 [a] 0 [ETX]
where
a = additive injector number [x]
Control Byte Information Fields
STX [AP] 0 [a] 0 [b] 0 [c] 0 [d] ... [i] 0 [ETX]
where
a = additive injector number [x]
b = line 1 load arm number [x]
c = line 1 additive K-factor [xx.xxxx]
d = line 1 high alarm multiplier [xx]e = line 2 load arm number [x]
f = line 2 additive K-factor [xx.xxxx]
g = line 2 high alarm multiplier [xx]
h = line 3 load arm number [x]
i = line 3 additive K-factor [xx.xxxx]
j = line 3 high alarm multiplier [xx]
k = line 4 load arm number [x]
l = line 4 additive K-factor [xx.xxxx]
m = line 4 high alarm multiplier [xx]
NAK If the requested additive injector is not available
If the number of command parameters is incorrect
-
8/13/2019 5 ProtocolManual1010 BJ
41/118
AP - Additive Parameters 8.6
CommandsSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 35
Send (Download)
Receive (Download)
Notes
These additive parameters can be edited from the ADD INJECTORS configuration menu.
Upload - to retrieve additive parameters from the instrument.
Download - to transmit the additive parameters to the instrument.
Related Commands
AI, AS
Control Byte Information FieldsSTX [AP] 0 [a] 0 [b] 0 [c] 0 [d] ... [i] 0 [ETX]
where
a = additive injector number [x]
b = line 1 load arm number [x]
c = line 1 additive K-factor [xx.xxxx]
d = line 1 high alarm multiplier [xx]
e = line 2 load arm number [x]
f = line 2 additive K-factor [xx.xxxx]
g = line 2 high alarm multiplier [xx]
h = line 3 load arm number [x]
i = line 3 additive K-factor [xx.xxxx]
j = line 3 high alarm multiplier [xx]
k = line 4 load arm number [x]
l = line 4 additive K-factor [xx.xxxx]
m = line 4 high alarm multiplier [xx]
Control Byte Information Fields
ACK
NAK If the requested additive injector is not available
If the number of command parameters is incorrect
If the load arm number is invalid.
If the additive K-factor is not in the range 0.001 to 50000.
If the high alarm multiplier is not in the range 2 to 10.
-
8/13/2019 5 ProtocolManual1010 BJ
42/118
8.6 AP - Additive Parameters
CommandsSoftware Protocol Manual
36 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Constraints
Instrument must be in the idle state. Intelligent Additives must be enabled.
Extra time of up to 3 seconds should be allowed while waiting for an acknowledge (ACK) response tothe download command as the instrument must update the non-volatile memory. This extra wait period
is not required for the upload command.
-
8/13/2019 5 ProtocolManual1010 BJ
43/118
AR - Additive Recipes 8.6
CommandsSoftware Protocol Manual
SLIP+V3-001-SP1010A-BJ - 25/01/2006 37
AR - Additive Recipes
Description
Upload or download the additive recipes when using intelligent additive injection.
Send (Upload)
Receive (Upload)
Control Byte Information Fields
STX [AR] 0 [a] 0 [ETX]
where
a = arm number [x] (upload recipes associated with this arm number)
Control Byte Information Fields
STX [AR] 0 [a] 0 [b] 0 [c] 0 [d] ... [w] 0 [ETX]
where
a = arm number [x] (upload recipes associated with this arm number)
b = additive injectors pulse [xxxx]
c = number of recipes [x] (0 to 4)
d = recipe number 1 [1] (number of recipes >= 1)e = line 1 additive amount [xxxx] ml(cc)/additive pulse
f = line 2 additive amount [xxxx] ml(cc)/additive pulse
g = line 3 additive amount [xxxx] ml(cc)/additive pulse
h = line 4 additive amount [xxxx] ml(cc)/additive pulse
i = recipe number 2 [2xxxxxxxxxx] (number of recipes > 1)
j = line 1 additive amount [xxxx] ml(cc)/additive pulse
k = line 2 additive amount [xxxx] ml(cc)/additive pulse
l = line 3 additive amount [xxxx] ml(cc)/additive pulse
m = line 4 additive amount [xxxx] ml(cc)/additive pulse
n = recipe number 3 [3] (number of recipes > 2)
o = line 1 additive amount [xxxx] ml(cc)/additive pulse
p = line 2 additive amount [xxxx] ml(cc)/additive pulse
q = line 3 additive amount [xxxx] ml(cc)/additive pulse
r = line 4 additive amount [xxxx] ml(cc)/additive pulse
s = recipe number 4 [4] (number of recipes > 3)
t = line 1 additive amount [xxxx] ml(cc)/additive pulse
u = line 2 additive amount [xxxx] ml(cc)/additive pulse
v = line 3 additive amount [xxxx] ml(cc)/additive pulse
w = line 4 additive amount [xxxx] ml(cc)/additive pulse
-
8/13/2019 5 ProtocolManual1010 BJ
44/118
8.6 AR - Additive Recipes
CommandsSoftware Protocol Manual
38 SLIP+V3-001-SP1010A-BJ - 25/01/2006
Send
NAK If there are no associated additive lines (injectors) for the specified arm numberIf the number of command parameters is incorrect
Control Byte Information Fields
STX [AR] 0 [a] 0 [b] 0 [c] 0 [d] ... [w] 0 [ETX]
where
a = arm number [x] (download recipes associated with this arm number)
b = additive injectors pulse [xxxx]
c = number of recipes [x] (0 to 4)
d = recipe number 1 [1xxxxxxxxxx] (number of recipes >= 1)
e = line 1 additive amount [xxxx] ml(cc)/additive pulse
f = line 2 additive amount [xxxx] ml(cc)/additive pulse
g = line 3 additive amount [xxxx] ml(cc)/additive pulse
h = line 4 additive amount [xxxx] ml(cc)/additive pulse
i = recipe number 2 [2] (number of recipes > 1)
j = line 1 additive amount [xxxx] ml(cc)/additive pulse
k = line 2 additive amount [xxxx] ml(cc)/additive pulse
l = line 3 additive amount [xxxx] ml(cc)/additive pulse
m = line 4