5 Application of Network Tomography

of 23
-
Upload
joaquimdalmeida -
Category
Documents
-
view
219 -
download
0
Transcript of 5 Application of Network Tomography
-
8/14/2019 5 Application of Network Tomography
1/23
5 Application of Network Tomographyin LANs
5.1 The Applicability of the Delay Model
The notions of the delay model provide useful instruments to conduct a link-level delay
distribution inference in a network. The measurements can be obtained by adopting one of
the techniques described in the Section 4 such as Ping, Traceroute or Pathchar. The choiceof the delay model and the reliability of the measurements are to be decided ointly. !nly in
this case it is possible to obtain optimal result from the estimations. "ctually, it is necessary
to know how high is the gap, if it e#ist, between the theoretical instruments provided by the
delay model and their applicability. The aim of this section is to reduce this gap and allow
the simplest solutions to obtain reliable results.
The present section describes in details the procedure to calculate the estimate of the link
delay distribution. $t provides, in particular, a general process to compute the iterative
analyses of the steady probability distribution described in the Section %.
The reliability of the results can be tested only by implementing the inference model to a
network. "n application in a &"' is the easiest way to proof the theoretical forecast, and to
test a large scale theory such as $nternet Tomography to a small network. Successively it is
mentioned the choice of Ping to obtain the measurements. "lthough, some changes of
Ping(s program, are also described to provide reliable measurement to the inference model.
The applicability of a model covers a delicate aspect of an inference model. $t is not always
possible to test an inference model with simple solutions. )ased on the analysis of link
delay estimation by &o Presti in a &"', this can be possible and the aim of this *hapter is
to provide its process of work.
5.2 Modeling Delay
&et T+,& be a logical tree . represents the set of vertices, with the source /, the
receivers 0 and the branch point of phys. The packets pair is sent down along the tree
-
8/14/2019 5 Application of Network Tomography
2/23
1manuele !rlando
from the root. &et us denote for each node ka random variable kD taking values in the
positive real line { }R+ . kD is the random delay that a packet could spend to traverse
the link , f k k L . /D represents the delay on the root and by convention kD +/. kD +
indicates a dropped packet along the link. The key hypothesis is that the independence of
the measured delays along each link can be assumed. 2or this reason kD are assumed to be
independent. $t is possible to define the cumulative delay e#perienced along a path from
the root to the node k, like the sum of each random variable kD along the path,
jkj k
X D
= .
"ccording to the discreti3ation by &o Presti described in the Section %, each link delay is
discreti3ed to a set +5/,q,6q,7,iq,)q,8, where q is the width bin, )9: is the number of
possible bin, and represents the event of packet lost. The probability distribution of kD is
denoted by k
e#pressed in the 1quation %.4 in the Section %, and
is the set ofdistribution for each link k e#pressed in the 1quation %.; in the Section %.
" measurement is the one way delay from the root to the end receivers represented by the
set 0k. The set of children of a generic node is denoted by d. &et us define
R k k RX X = as the one way delay occurred on the way from the source to the receivers
belonging to the set 0k. RX is also discreti3ed to the set . 2igure %.< in the Section %,
depicts the space of RX , in which R +#. The 1quation %.:= in the Section % shows
the way to obtain > k d . ?sing the 1@ algorithm to ma#imi3e the likelihood function
, A L X D in the 1quation %.:B, the ma#imum likelihood estimate of>
k d , with k is
> >
k k
kk
d Q
n d n d d
n d n
== ;.:
&et us focus now on the computation of > kn d . Cnowing > kn d for each d, the
probability distribution along the k-th link k d can be obtained. $n the 1quation %.6< in
the Section %, let us call the measurement ijx depending on i, simply Rx . This is the case,
in which 0k is composed of two end receivers. $f there are more subsets of two end
receivers of 0k, it is necessary to introduce a summitry with i, inde#es.
The computation of > kn d is quite complicated. The second step of 1@ algorithmDB,6=,6EF
shows how > kn d can be computed.
;/
-
8/14/2019 5 Application of Network Tomography
3/23
; "pplication of 'etwork Tomography in &"'s
>:> D G F
nm
R Rk l km
n d P D d X x=
= = =
> D G F
l
R RR R Rk
xn x P D d X x
= = =
>
>
D G F>
D F
l
lR R
R R k lR k
x R R
P X x D dn x d
P X x
= ==
=
;.6
Having the link k fi#ed, the count > kn id for each iq can be calculated in the 1quation
;.6. The iterative algorithm is e#pressed by the distribution k computed at the step l. &et
us focus the attention on each of the components of the 1quation ;.6.
Computation of 0n#
Rx is a 6 # nvector. n represents the number of packets pairs sent to the end receivers of
the set 0. 1ach line of Rx belongs to a finite space defined by R +#. Rn x representsthe number of times the same discreti3ed measurement is present in the vector Rx .
Computation of >D Fl R RP X x = and
>
D G Fl R R kP X x D d = =
This is the most comple# aspect of the computation. &et 0k the set of receivers
descendent from the node k. $f k0, there will be assumed 0k+5k8.
&et us define jR k j R kY Y = as the delay observed from receivers descendent from
node k. &et R k R k f kZ Y Y= be the delay measured from node fk down to the
receivers of k. &et us denote A D Fk R k R k R k z P Z z = = , k,
num R k
R kz .$f ,
for e#ample , the tree is composed of three vertices, 2igure ;.: shows the
corresponding R kz for a node k.
;:
-
8/14/2019 5 Application of Network Tomography
4/23
1manuele !rlando
The A k R kz respects the following recursion
A k R k k R k z z = k0 ;.%
A A jk R k k R j
d Q j d kz d z d
= k0 ;.4
$n the 1quation ;.4 R k R j j d kz z = .
f(k)
k
R(k)
0
f(k)
k
R(k)
0
2igure ;.:I 2or each k it is possible to calculate R kz . 2rom the total R kY delayfrom the root till the set 0k the , f kY is subtracted.
There are the necessary instruments to calculate >D FR RlP X x
= . $n fact, it is sufficient to
observe that :R RY Z= , where : denotes the child node of the root node /.
The 1quation ;.; shows that the delays observed at the receivers are equal to the delay
e#perienced from the root down to the receivers of :, which represent the set 0.
/: : : : RR R f RZ Y Y Y Y Y= = = ;.;
$t is possible then to define the computation of >D FR RlP X x
= as
;6
-
8/14/2019 5 Application of Network Tomography
5/23
; "pplication of 'etwork Tomography in &"'s
: ::>> >D F A A
ll l
R R RRP X x z y
= = =
;. D G FR Rl kP X x D d = = can be obtained in a similar way, even if it is
more complicated than >D FR RlP X x
= , because the probability in this case is calculated by
conditioning to each possible value of d and for each measurement Rx . The approach to
compute this probability is the following I
,> >
FD G F Dl lk d
R R R RkP X x D d P X x
= = = =
;.B
where the distribution , >k dl
is obtained from > l by setting > J :l
d = when d+d( and
> J /l
d = otherwise. This process will be e#plained better in the ne#t section where it is
described the practical application and the computation of these probabilities. $t is possible
to define the computation >D G FR Rl kP X x D d
= = asI
,
: ,> >
F >D G F D A l lk d
lR R R R Rk k d
P X x D d P X x y
== = = =
;.=
'ow all the probabilities in the 1quation ;.6 are computed. $t is vital to understand that
the 1quation ;.6 works, when a branch node k is chosen. Then > kn d must be calculatedfor each d. The computation of the 1quation ;.B is rather difficult, because it depends not
only on the measurement but also on the current d. The implicit difficulty is that in order to
calculate each probability, it is necessary to know the current distribution of the other link,
which belongs to the path. $t must be calculated for each link, and this increases the
computational burden of the inference algorithm. The 1quation ;.6 shows the recursion of
the equation, where > l
k d represents the probability delay distribution of link k,
calculated in d and in the previous step. The choice of the initial distribution is vital if a
fast convergence is required. $t is described in D
-
8/14/2019 5 Application of Network Tomography
6/23
1manuele !rlando
The pseudo code to compute the link delay distribution will be described in the present
section. $t is composed of the above mentioned 1@ algorithm.
The variable l represents the current step. The variable threshold represents the
parameter which allows the algorithm to know if the ma#imum is reached. $n fact, by
comparing the current inferred estimate with the previous one, the difference betweenthem, can be defined. This value is e#pressed by the variable threshold . $f the threshold is
low, more iterations are necessary. The threshold defines the surface of the
multidimensional ma#imum point. The ma#imum will be a point with a null surface, only
if there is infinite equality of each component of the current estimate to each component of
the previous one. $n this case the threshold is represented by the value 3ero. $n the practical
application it is advisable to use a large threshold and then to decrease it until the
computational burden will become too heavy and the number of the iterations be too high.
?sually, a threshold of one percent is sufficient. $f the tree has few nodes, it is possible to
decrement the threshold. The problem can be contained in the appro#imation processes of
the compiling program. The pseudo code implemented by 2rancesco &o Presti D6EF is
depicted in the 2igure ;.6 .
procedure main 5
l+/ A choose > l A do 5 K computation of the e#pected counts
for each k
for each d
> kn d + / A
for each Rx R
> kn d 9 +
,
,
>L :, ,>
>L :,
lk d l
R kl
compute yRn x d
compute yR
end
end
end
Kcomputation of the current estimates
for each k
for each d
:>
> Al kk
n dd
n + =
end
end
l 99A
;4
-
8/14/2019 5 Application of Network Tomography
7/23
; "pplication of 'etwork Tomography in &"'s
8 while :> >G Gl l M threshold A
> > l = A 8
double function compute_k! z! "5
if k 0
return >k z A
else
return
L , , Ak R j
d Q j d kd compute j z d
8
2igure ;.6I The pseudo code.
5.$ Application to the %o"ter Lab LAN
The goal of the present work is to apply 'etwork Tomography on a &"'. 'etwork
Tomography is usually referred to $nternet Tomography because it focuses on a large scale
network. The aim of this work is to test a delay probability distribution inference in a small
scale network. "pplying the mentioned algorithm to a &"', the theory to an accessible and
bordered network can be used. "ll the e#periments have be conducted in the 0outer &ab of
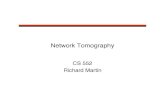
the Nepartment of Nistributed System of the ?niversity of Ouer3burg ermany. Thephysical network, to which the analysis of probability distribution delay is applied, is
depicted in the 2igure ;.%
19.8.9.200
19.10.10.10 19.10.10.254 19.8.240.1
Hera ZeusSelene
Cat 2912 XL
19.8.9.100
Venus
Latona
Ull
Fast Ethernet IEEE 802.3u (100MBits/s)
Ethernet V.21 eria! !ink (2MBits/s)
19.8.9.200
19.10.10.10 19.10.10.254 19.8.240.1
Hera ZeusSelene
Cat 2912 XLCat 2912 XL
19.8.9.100
Venus
Latona
Ull
Fast Ethernet IEEE 802.3u (100MBits/s)
Ethernet V.21 eria! !ink (2MBits/s)
;;
-
8/14/2019 5 Application of Network Tomography
8/23
1manuele !rlando
2igure ;.%I The physical tree is composed by the root ?ll and the end receivers
&atona and enus.
The host ?ll represents the root or the source. &atona and enus are the end receivers. npacket pairs are sent from ?ll to &atona and enus. 2igure ;.% shows the physical tree.
"pplying the @odel Tree described in the Section %.6 , it is possible to make a graph of the
logical tree shown in the 2igure ;.4. 1ach link is labeled with a number. The branch node 6
is k, and the node : is its parents fk. 0k, the set of end receivers that will receive the
packet pairs sent from the root, are nodes % and 4.
2igure ;.; shows the tree, to which the &o Presti algorithm will be applied. The algorithm
works on the link separated by a branch node. $n this case the branch node is the number 6.
The goal is to estimate the delay distribution for the links 6, % and 4.
0 1 2
4
3
Ull Hera Zeus
Venus
Latona
R""t f(k) k
R(k)
2igure ;.4. &ogical tree. Nenote the node k, its parent fk and the set of
receivers 0k.
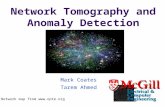
" packet pair is sent from root to host % and 4. The first member of the packet pair will
reach the host 4 and the second member the host %. 2igure ;.< shows how the two members
of the packet pair travel in the network. The inference strategy works on the common path
0 2
4
3
;
-
8/14/2019 5 Application of Network Tomography
9/23
; "pplication of 'etwork Tomography in &"'s
2igure ;.;I The logical tree is composed of three links. The goal is to estimate
the probability delay distribution 6 , % and 4 .
the packet pairs crosses. $n fact, the algorithm cannot distinguish between the differentlinks from root until node number 6, and considers the global link from the root to the host
number 6. The branch nodes play a very important role in defining, which link can be
analy3ed by the algorithm. The key sentence is that the inference strategy works on the
common path of the packet pairs. The measurement represents the one way delay from the
0 2
4
312
#"$$"n %ath
2igure ;.
-
8/14/2019 5 Application of Network Tomography
10/23
1manuele !rlando
2igure ;.BI The red line show the one way direction, the black, show the coming
back. $t is easy to note the same shared path between the two directions.
2igure ;.B helps to understand how the problem can be solved by means of applying the0TT measurement. The first and second members cover the same path to go and to come
back. 2or e#ample, the first member is directed to the end host 4, makes the trip /, 6,4 and
comes back covering the same path, 4, 6 ,/. There is no difference between the application
of the inference to the one way measurement and the 0TT, because the member makes the
same way. $t is a specific case for this application, when there is the certainty that the
packet member travels along the same path. This simplification makes the 0TT calculation
preferable to calculating the one way delay. This computation can be made more easily
applying one of the tools mentioned in the Section 4.
5.5 The #hoice of !ing
$n the Section 4 some tools to measure the 0TT of the packets pair along a path have been
described.
Ping, Traceroute and Pathchar are equivalent in the 0TT computation where the ambient to
measure is a small area network, such as &"'. The path is relatively short and the
computation of the 0TT is easy to conduct and its precision is reliable enough.
The goal is to choose one of these three programs. The aim of the present work is to offer
an inference instrument able to operate in all the &"'s. To obtain a universal instrument, itis preferable to focus on the most simple solutions.
$n this case, Ping represents this simplest choice. Ping is an administrator(s tool that all
hosts should implement. $t does not have any restrictions to work. Ping is a common tool
and is really easy in use. Traceroute and Pathchar are focused on other specific goals apart
from 0TT, such as the record of the routes, latency and bandwidth estimate. This
information is not the subect of interest to the inference algorithm this work is devised to
implement. )esides, Traceroute and Pathchar depend more heavily on the operative system
of the machine in which they run. Ping, on the contrary, is a more transparent tool. $n a
&"', the 0TT of Ping is reliable, because the path to test is short and is composed of few
routers.
The precision of the measurement is linked to the dimension of the bin si3e of the &o Presti
algorithm. $n fact, why should be a higher degree of precision of the measurement required,
if it will be eliminated during the discreti3ation processQ This e#ample shows, why
measurements and inference strategies should be chosen ointly.
;=
-
8/14/2019 5 Application of Network Tomography
11/23
; "pplication of 'etwork Tomography in &"'s
The 2igure 4.6 in the Section 4 shows an application of Ping. $t works simply by typing the
destination host to ping and the number and the dimension of the packet to send D%/F. The
goal is to obtain the 0TT for a packet pair described in the Section %. Two $*@P packets
should be sent consequently to the respective end host destinations as 2igure ;.= e#plains.
The 2igure %.6 in the Section % shows the trip of a packet pair along the path. The Ping
program iputils-6//6/E6B is able to ping one host at a time. $t must ping two hosts at thesame time. " first packet should be sent to the address of the first end node, and the
second packet should be sent immediately after the first one to the address of the second
node. The 2igure ;.= shows this request.
2 1
t
&''ress 2
&''ress 1
&''ress 1 &''ress 2
"ur#e
"ur#e
IM
2igure ;.=I Two $*@P packet should be sent in the time :t and 6t to the address
: and 6.
$t is vital to define the processing gap : 6G GP# t t = as the current time between the first
and the second $*@P. The inference strategy requires a P# / that is the second $*@P
leaves immediately after the living of the first. )oth packets should travel one after another
and come back in the same order to the source. "n P# / allows the packets to test thesame state of the traffic network and is essential for the reliability of the measurement. The
algorithm works on the common path the two packets cover. The second $*@P tests the
congestion of the first one. This permits the second packet to be behind the first one with a
high probability. This operation should be implemented by Ping.
&et us focus the attention on the Ping iputils and its processing gap. Ping iputils allows to
ping one host at a time and listen to the $*@P 1cho 0eply coming back. !nly after the
answer is received, another $*@P 1cho 0equest is sent. This is a serious problem, becausethe Ping iputils allows to work only with one end host. There is not the possibility to
initiali3e a sequence of two $*@P sending process to two different end hosts.
;E
-
8/14/2019 5 Application of Network Tomography
12/23
1manuele !rlando
1 1 2 2
*
E#h" Re+1 E#h" Re%1E#h" Re+2 E#h" Re%2
,ar-et h"st 1 ,ar-et h"st 21 1 2 2
*
E#h" Re+1 E#h" Re%1E#h" Re+2 E#h" Re%2
,ar-et h"st 1 ,ar-et h"st 2
2igure ;.EI The normal operation of Ping iputils. The second packet can be sent
only after the source has received the answer of the first one.
The implementation shown in 2igure ;.= must be reached by modifying the original
program. Ping iputils is able to implement the operation shown in the 2igure ;.E. The
source sends the first packet and then, only after the 1cho 0eply is received, Ping sends
another packet to the second host. This operation is rather difficult. $n practice, to change
the address of the first end host in the address of the second end host means to initiali3e
another Ping process. The 2igure ;.E shows how large is the processing gap. This cannot
be a reliable measurement and it cannot be applied to the inference strategy. $t is necessary
hence to modify the Ping iputils in a program able to work like the pseudo code depicted in
the 2igure ;.:/. This pseudo code shows how the new modified Ping works. The icmp_se$
represents an inde# which will play an important role in the modified Ping. nrepresents the
number of the packets pairs to send. The result of the measurements is a n # 6 vector Rx .
The original Ping program is replaced with the modified Ping program.
for icmpLseq+: to n
send Packet :icmpLseq to host :
send Packet 6icmpLseq to host 6
print timestamp Packet :returned icmpLseq from host :
print timestamp Packet 6returned icmpLseq from host 6
end
2igure ;.:/I The pseudo code represents the functioning of the modified Ping
program.
Modified Ping
The original Ping is the version iputils-6//6/E6B, written by @ike @uuss, ?.S. "rmy
)allistic 0esearch &aboratory, in Necember :E=%.
-
8/14/2019 5 Application of Network Tomography
13/23
; "pplication of 'etwork Tomography in &"'s
The most important modifications conducted in the process of the present work areI
:. Nuplicating the buffers, the structures and the necessary variables to describe an
$*@P packet. The task of a second buffer is to allocate the packet direct to the second
host.
6. Nuplicating the necessary variable to count the $*@P packet sent.
%. "dding a control to be able to specify in the command line the second host which has
to be pinged.
4. "dding a code responsible to traduce the hostname string in the format network-byte-
ordered.
;. @aking a second socket icmp_sock%.
-
8/14/2019 5 Application of Network Tomography
14/23
1manuele !rlando
I* /at"na(19.8.9.200)Venus(19.8.9.100) 5 te
4 tes fr"$ 19.10.10.10 t" 19.8.9.200 t" i#$%se+0 tt!255 ti$e0.298 $s4 tes fr"$ 19.10.10.10 t" 19.8.9.100 t" i#$%se+0 tt!255 ti$e0.312 $s
4 tes fr"$ 19.10.10.10 t" 19.8.9.200 t" i#$%se+1 tt!255 ti$e0.310 $s4 tes fr"$ 19.10.10.10 t" 19.8.9.100 t" i#$%se+1 tt!255 ti$e0.332 $s
4 tes fr"$ 19.10.10.10 t" 19.8.9.200 t" i#$%se+3 tt!255 ti$e0.310 $s4 tes fr"$ 19.10.10.10 t" 19.8.9.100 t" i#$%se+3 tt!255 ti$e0.354 $s4 tes fr"$ 19.10.10.10 t" 19.8.9.200 t" i#$%se+4 tt!255 ti$e0.313 $s4 tes fr"$ 19.10.10.10 t" 19.8.9.200 t" i#$%se+4 tt!255 ti$e0.351 $s
2igure ;.::I "n application of the modified Ping program. The end host &atona
and enus are pinged. '+4 and the dimension of the packet is ;< byte.
The icmp_se$ is vital for the right functioning of this new tool of measurement. $t
represents the current packet pair sent. $t can check the right order of each member of thepacket pair. 2or e#ample, the 2igure ;.:: shows how the right order of the two members is
achieved. This is really an important inde#, because it allows to notice if the second
member goes past the first during the trip. The icmp_se$ Rlabels the member of the packet
pair, making recogni3able its arrival to the source.
"nother advantage is that the icmp_se$ can be used as a pointer in the construction of
the vector Rx . 1ach line of Rx corresponds to a same icmp_se$, and the columns, to the
first and second member of the same packet pair. "ll the measurements in this work are
obtained by applying the modified Ping.
5.& 'mplementation
This section e#plains how the modeling delay can be applied to the logical tree depicted in
the 2igure ;.;. The set of the nodes k is composed of node 6, % and 4. $t is possible to
define only a 06, because the nodes % and 4 do not have children nodes. That is why the
only node satisfying the condition k0 is the node number 6. The 1quations ;.% and ;.4
can be written in the following wayI
% %% % A
R Rz z = k+%0 ;.E
4 44 4 A
R Rz z = k+40 ;.:/
-
8/14/2019 5 Application of Network Tomography
15/23
; "pplication of 'etwork Tomography in &"'s
6 6 66 66
A A R R
d Q j dz d z d
= k+60 ;.::
2rom the 1quation ;.: it is possible to estimate the value of the delay probability for
each value of d as
> > kk
n dd
n = k+56,%,48 ;.:6
Choice of initial distributions/>
k
The logical tree is of a small dimension. The typical initial delay probability
distribution/
6> ,
/%
> , and /4> can be chosen. The most advisable choice is the
uniform probability distribution depicted in the 2igure ;.:6. 1ach value d at the step
3ero has the same probability.
1/(B61)
+ 2+ 3+ B+
i+7+/2 i+6+/2
i+ '
2igure ;.:6I 1ach value belonging to the set has the same probability.
The algorithm works iteratively, and the distribution will change until the stationary
probability distribution is reached. The algorithm models the distributions, giving more
weight to the event of delay with more probability to be verified. The value of delay with a
null probability represents a delay that cannot ever be tested on the link. "fter a number of
iterations, the algorithm reaches the steady solution and the distributions can be analy3ed.
-
8/14/2019 5 Application of Network Tomography
16/23
1manuele !rlando
Computation of >D F
lP X x
R R=
This computation is obtained by using the 1quation ;.< and the recursion of the 1quation;.::. The 2igure ;.:% shows the graphical procedure of the computation.
/ 6 % 4 6 % 4>D 6 ,% F / 6 % 6
RP X d d d d d d d
= = + +
6 % 46 / d d + ;.:%
1/5
1/5
0 ' 2' 3' 4'
0'2'
0'2'3'
d
d
d
1/5
1/5
1/5
0 ' 2' 3' 4'
0'2'
0'2'3'
d
d
d
1/5
2igure ;.:%I " graphical approach to the computation of >D FR RlP X x
=
>D FR RlP X x
= is calculated for each measurement Rx , and it does not depend on the value
d, but only on the specific value of Rx . )esides, the computation depends on the step l.
1ach iteration of the algorithm changes the previous distributions, and a new computation
of >D F
R Rl
P X x
=must be calculated with the new distributions.
Computation of >D G F
l R R kP X x D d
= =
This computation is the most complicated. There is not only the dependence by the
measurement, but also by the value of d. This is a conditioned probability, which is
-
8/14/2019 5 Application of Network Tomography
17/23
; "pplication of 'etwork Tomography in &"'s
the probability that a measurement assumes the value Rx along the path, by conditioning to
a measured delay equal to dover the link kof the path. $t is vital then to compute this
probability d and Rx measured. This is the most difficult part of the algorithm,
because the comple#ity increases if the bin si3e decreases and ) augments.
The computation is obtained by using the same strategy as for the computation of
>D FR RlP X x
= . $t is necessary to compute the new probability distribution
> ,
D FR Rlk d
P X x
=mentioned in the 1quation ;.B . $t is obtained by setting the distribution
> J :k d = , where d(+d and 6> 6 :d = > J /k d = otherwise.
1
1/5
0 ' 2' 3' 4'
0'2'
0'2'3'
d
d
d
1/5
2igure ;.:4. The 6> is set for d(+6d and the 6 >D 6 ,% G 6 FRlP X d d D d
= =
can be found.
2or e#ample, if the goal is to estimate >D G 6 FR Rl kP X x D d
= = , the distribution
> J 6 :k d d = = and the 1quation ;.:: can be applied. The 2igure ;.:4 shows the graphical
approach to understand the computation. $n this case, given the measurement RX +6d,%d
the probability 6 >D 6 ,% G 6 FRlP X d d D d
= = is obtained by setting the distribution
6> 6 :d = .
2igure ;.:4 shows a particular computation for d(+6d, given the measurement Rx . $n this
case the probability is e#pressed by the 1quation ;.:4.
-
8/14/2019 5 Application of Network Tomography
18/23
1manuele !rlando
/ /6,> >
F / 6 % 4
D 6 ,% G 6 F Dd
R R R dP X d d D d P X x
== = = =
;.:4
Ohen all the probabilities are computed d, the set of > ,D FR Rl
k d
P X x
=is obtained
and can be used in the 1quation ;.6. )y changing the node k the />%,D FR R
d
P X x
=and
/>4,
D FR Rd
P X x
=are computed.
The pseudo code described above makes the computation of > kn d easy.
The simplest example
The following is a theoretical e#ample that shows the computation of > kn d given the one
way measurement. n+4 , the bin si3e q+/.: ms and )+;. The case of value is omitted.
The algorithm is implemented in the @atlab language.
Nefine a vector of the measurement as
me*sX +D/.:6%,/.6:A/.64,/.6=:A/.:6%,/.6%A/.6B,/.%
-
8/14/2019 5 Application of Network Tomography
19/23
; "pplication of 'etwork Tomography in &"'s
1/5
3'2''0 d4'
2igure ;.:;. The initial delay probability distribution is an uniform
discrete probability distribution.
Computation of , >D F
lP X x
R R=
"pplying the 1quation ;.D FP X x
R R
= is
0
: 6
6 %
: 6
% 4
X
= ,/>
/./:
-
8/14/2019 5 Application of Network Tomography
20/23
1manuele !rlando
/
/
6 />6 6
>
D G /F>> / /
D FR
R R
Rx X R RR
P X x Dn n x
P X x
= ==
=+:.;=%% ;.:B
?sing the 1quation ;.:< and ;.:B to calculate 6, >n id for / U i U ), the vector 6> , n d will
be obtained in one step.
6
:.;=%%
:.;=%%
> , /.;=%%
/.6;//
/
n d
= ;.:=
The new delay probability distribution after one step is obtained by applying the 1quation
;.:6.
,:
6
/.%E;=
/.%E;=
> , /.:4;=
/./ and ,:
6> shows how in the process of the iteration of the
algorithm the distributions trying to reach the steady solution are modeled.
"ll the computations are made for the nodes k+%, 4 and the distributions,:
%> and ,:
4>
are the followingI
-
8/14/2019 5 Application of Network Tomography
21/23
; "pplication of 'etwork Tomography in &"'s
,:
%
/.%E;=
/.%E;=
> /.:4;=
/./ /.%E;=
/.:4;=/./ /.6;/
/
/
=
,B
%
/.//:
/.EEE
> /
/
/
=
,B
4
/
/.//6
> /.EE=
/
/
=
;.6:
These results represent the steady solution of the delay distribution probability along the
links 6,%, and 4. *ertainly, it is a really simplified e#ample, and the shape of thedistributions is readable enough. 'e#t *hapter shows some e#periments on a large time
interval with a high number of bin. $n this case the number of necessary iterations
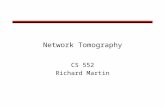
increases. The 2igures ;.:< ,;.:B and ;.:= show the probability delay distributions obtained
by @atlab.
-
8/14/2019 5 Application of Network Tomography
22/23
1manuele !rlando
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
Delay Probability Distribution - Link 2
Delay d (ms)
Probability
a2(d)
0.5
0.25 0.25
2igure ;.:
-
8/14/2019 5 Application of Network Tomography
23/23
; "pplication of 'etwork Tomography in &"'s
-0.5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Delay Probability Distribution - Link 4
Delay d (ms)
Probability
a4(d)
2igure ;.:=I Nelay Probability Nistribution along link 6
B: