45221291-ccc
274
U 4725 121st Street Des Moines, Iowa 50323, U.S.A. Phone: (515) 270-0857 Fax: (515) 270-1331 GLOBAL SUPPLIERS OF TURBINE AND COMPRESSOR CONTROL SYSTEMS Web: www.cccglobal.com A/D RAM PID ID F Documentation Feedback Form IM301 Series 3 Plus Antisurge Controlleruser manual Series 3 Plus Antisurge Controller for Axial and Centrifugal Compressors Publication IM301 (6.1.3) Product Version: 756-004 September 2005
-
Upload
ntthongdnb -
Category
Documents
-
view
63 -
download
8
Transcript of 45221291-ccc
PID A/D
UF
RAM
GLOBAL SUPPLIERS OF TURBINE
ID
AND COMPRESSOR CONTROL SYSTEMS
IM301
Series 3 Plus Antisurge Controlleruser manual
Series 3 Plus Antisurge Controllerfor Axial and Centrifugal CompressorsPublication IM301 (6.1.3)Product Version: 756-004 September 2005
Documentation Feedback Form4725 121st Street Des Moines, Iowa 50323, U.S.A. Phone: (515) 270-0857 Fax: (515) 270-1331 Web: www.cccglobal.com
1987-2003, Compressor Controls Corporation. All rights reserved. This manual is for the use of Compressor Controls Corporation and is not to be reproduced without written permission. Air Miser, Guardian, Recycle Trip, Reliant, Safety On, SureLink, TTC, Total Train Control, TrainTools, TrainView, TrainWare, Vanguard, Vantage, WOIS, and the TTC and impeller logos are registered trademarks; and COMMAND, TrainPanel, and the Series 3++ and Series 5 logos are trademarks of Compressor Controls Corporation. Other company and product names used in this manual are trademarks or registered trademarks of their respective holders. The control methods and products discussed in this manual may be covered by one or more of the following patents, which have been granted to Compressor Controls Corporation by the United States Patent and Trademark Office: 4,949,276 5,622,042 5,879,133 6,116,258 6,494,672 5,347,467 5,699,267 5,908,462 6,217,288 6,503,048 5,508,943 5,743,715 5,951,240 6,317,655 5,609,465 5,752,378 5,967,742 6,332,336
Many of these methods have also been patented in other countries, and additional patent applications are pending. The purpose of this manual is only to describe the configuration and use of the described products. It is not sufficiently detailed to enable outside parties to duplicate or simulate their operation. The completeness and accuracy of this document is not guaranteed, and nothing herein should be construed as a warranty or guarantee, expressed or implied, regarding the use or applicability of the described products. CCC reserves the right to alter the designs or specifications of its products at any time and without notice.
Series 3 Plus Antisurge Controller
3
Document ScopeThis manual tells how to configure, tune, and operate a Series 3 Plus Antisurge Controller. It does not tell how to install or maintain it (see the Series 3 Plus Hardware Reference manual [IM300/H]), nor how to program a DCS to use its Modbus interface (see the Series 3 Plus Modbus Reference manual [IM300/M]). Chapter 1 Chapter 2 Chapter 3 Chapter 4 Chapter 5 Chapter 6 Chapter 7 Chapter 8 Chapter 9 Appendix A Appendix B Appendix F summarizes this controllers applications and features. describes the operation of the Antisurge Controller. tells how to configure the analog and discrete inputs and outputs and serial communication ports. tells how the Antisurge Controller calculates the values of various process conditions. tells how to set up the proximity-to-surge calculation and fallbacks. tells how to set up the algorithms that calculate various control responses and select the required recycle flow rate. describes the additional features used to protect multisection and networked compressors from surge. tells how the valve position and actuator control signal are derived. tells how to set up the Antisurge Controllers automatic sequencing, manual operation, and redundant control features. describes each Antisurge Controller configuration parameter. describes the controller test procedures that can be executed from the Engineering Panel. describes each fA mode of the standard Antisurge Controller that is currently recommended for general use. Appendix FS provides basic documentation of application functions that are not recommended for general use. defines and references various topics discussed in this manual. lists and describes the default data items that the Series 3 Plus OPC Server provides for this controller. lists this controllers Modbus coils, discrete bits, and registers. describes the controllers Front-Panel operator interface. describes the changes to each standard release of this controller. lists the configuration and tuning parameters by key sequence, organized by data group and page. lists the configuration and tuning parameters by name, grouped according to the associated controller feature.IM301 (6.1.3)
Glossary/Index DS301/D DS301/M DS301/O DS301/V FM301/C FM301/L
Finally, the following supporting documents are included at the back of this manual:
September 2005
4
Contents
Document ConventionsThe document title appears in the header of each odd-numbered page, while the chapter or appendix title appears in the header of even-numbered pages. Odd-page footers list the document number and revision level [IM301 (6.1.3)], while even-page footers provide the publication date (September 2005). Acronyms are defined in the sections of this manual that discuss the corresponding subjects, by placing them in parentheses following the spelled-out terms they represent. As an example, a three-letter acronym (TLA) is a way to represent a three-word subject by combining and capitalizing the initial letters of those three words. Most are also listed under Symbols and Acronyms on page 10. Cross-references to other documents specify a section and chapter, while cross-references between chapters of this document specify a page number. References that do not specify a location are internal to the chapter in which they appear. In computerized versions of this manual, all such references are hot-linked to their target locations and appear in green. Entries in the tables of contents, illustration and table lists, and index are also hot-linked but are not green. Attention may be drawn to information of special importance by using this text styling or one of the following structures:
Note: Caution: Warning!
Notes contain important information that needs to be emphasized. Cautions contain instructions that, if not followed, could lead to irreversible damage to equipment or loss of data. Warnings contain instructions that, if not followed, could lead to personal injury. The appearance of this electrical hazard warning symbol on CCC equipment or the word Warning appearing in this manual indicates dangerously-high voltages are present inside its enclosure. To reduce the risk of fire or electrical shock, do not open the enclosure or attempt to access areas where you are not instructed to do so. Refer all servicing to qualified service personnel. The appearance of this user caution symbol on CCC equipment or the word Caution appearing in this manual indicates damage to the equipment or injury to the operator could occur if operational procedures are not followed. To reduce such risks, follow all procedures or steps as instructed.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
5
Table of ContentsDocument Scope . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Document Conventions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Table of Contents. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 List of Figures. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 List of Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Symbols and Acronyms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Chapter 1
Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15Applications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Major Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Proximity to Surge Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . Fallback Strategies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Control Responses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Limiting Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Loop Decoupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Valve Sharing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Equivalent Flow Calculations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Load Sharing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Operating States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Automatic or Manual Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . Redundant Controller Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . Hardware Configurations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Analog and Discrete I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Control Valve Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Serial Communication . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Configuration and Tuning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 19 21 21 21 21 22 22 22 22 22 23 23 23 23 24 24 24 25 26 26 26 27 29 29 29 30 30 31 31 31 32 32 33 33
Chapter 2
Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25Operator Interfaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Continuous Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Valve Position. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Valve Sharing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Surge Protection. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Pressure Limiting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Performance Limiting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Load Sharing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sequencing Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Shutdown . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Stop State. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Purge State. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Startup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Manual Operation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Initiating Manual . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Restoring Automatic . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Manual Override. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
September 2005
IM301 (6.1.3)
6
ContentsFault Indicators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .34 Tracking States . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36 Output Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36 Redundant Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .36
Chapter 3
Input/Output Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37Hardware Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Disabling Input Signals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37 Analog Inputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .38 Analog-to-Digital Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Transmitter Testing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Signal Variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .39 Process Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40 Measured Variables. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .40 Analog Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Output Loopback Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .42 Valve Position Test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .43 Discrete Inputs. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .44 Discrete Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45 Fault Relays. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45 External Alarms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45 Serial Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .48 ID Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49 Serial Communication Formats . . . . . . . . . . . . . . . . . . . . . . . . . . . .49 Serial Communication Errors. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .49 Modbus Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .50
Chapter 4
Calculated Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51Pressures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51 Temperatures . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .51 Head . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52 Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .52 Power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53 Flow Rates. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Reduced Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Calculated Flow Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . . .54 Dual Flow Transmitters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .55 Control Valve Compensation . . . . . . . . . . . . . . . . . . . . . . . . . . . .56 Discharge Flow Measurement . . . . . . . . . . . . . . . . . . . . . . . . . . .57 Aftercooler Flow Measurement . . . . . . . . . . . . . . . . . . . . . . . . . .57 Mass Flow Rates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .58 Compensating Pressure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .59 Compensating Temperature . . . . . . . . . . . . . . . . . . . . . . . . . . . .59 Calculated Variable Displays. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .60 Displayed Speed . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Displayed Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .61 Displayed Net Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .62
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
7
Chapter 5
Proximity to Surge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63Application Function. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Filtering. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Characterizing Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Fixed-Geometry Compressors . . . . . . . . . . . . . . . . . . . . . . . . . . Variable-Geometry Compressors . . . . . . . . . . . . . . . . . . . . . . . . Fallback Strategies. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Default Output Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Minimum Flow Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Compression Ratio Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Sigma Fallback. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Speed Fallback. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Function 5 Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Adjacent Section Flow Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . Valve-Sharing Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Polytropic Head Fallback . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63 64 64 65 66 67 67 68 69 69 69 70 70 70 70 71 72 73 73 74 74 75 75 76 77 77 78 78 79 80 82 82 83 83 83
Chapter 6
Antisurge Control . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71Control Lines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Surge Control Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Recycle Trip Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Safety On Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Tight Shut-Off Line . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Derivative Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Safety On Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Surge Detection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Surge Counters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Antisurge Control Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . PI and RT Signal Selection . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . General PI Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Dead Zone . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Antisurge PI Response. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Recycle Trip Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Pressure Limiting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Pressure Limit Scaling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Auxiliary Limiting . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Performance Override . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Loop Decoupling . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
September 2005
IM301 (6.1.3)
8
Contents
Chapter 7
Multi-Compressor Protection . . . . . . . . . . . . . . . . . . . . . . . . . . . .85Multisection Compressors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85 Equivalent Flow Measurements. . . . . . . . . . . . . . . . . . . . . . . . . . . .85 Reported Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .86 Upstream Section Flow Known . . . . . . . . . . . . . . . . . . . . . . . . . .87 Downstream Section Flow Known . . . . . . . . . . . . . . . . . . . . . . . .89 Valve Sharing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .91 Networked Compressors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92 Primary Capacity Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .92 Load Balancing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93 Recycle Balancing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94 Port 1 Balancing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94 Port 2 Balancing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .94 Cold-Recycle Control. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .95
Chapter 8
Output Variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .97Intended Valve Position. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98 Valve Flow Characterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .98 Actuator Control Signal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .99 Valve Dead Band Compensation. . . . . . . . . . . . . . . . . . . . . . . . . . .99 Output Clamps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .100 Remote Low Output Clamp . . . . . . . . . . . . . . . . . . . . . . . . . . . .100 Tight Shut Off Response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101 Output Reverse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .101 Output Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .102
Chapter 9
States and Transitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .103Operating State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .103 Operating State Request Signals . . . . . . . . . . . . . . . . . . . . . . . . .103 Startup Configuration. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104 Shutdown Configuration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104 Stop State . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104 Valve Sharing Shutdowns . . . . . . . . . . . . . . . . . . . . . . . . . . . . .104 Manual Override . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .105 Alternate Parameter Sets . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106 Redundant Tracking . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106 Switching Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .106
Appendix A Appendix B Appendix F Appendix FS
Configuration Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .107 Controller Test Sequences . . . . . . . . . . . . . . . . . . . . . . . . . . . . .139 Application Functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .151 fA Mode Supplement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .193 Glossary/Index. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .213
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
9
List of FiguresFigure 1-1 Figure 1-2 Figure 1-3 Figure 1-4 Figure 1-5 Figure 1-6 Figure 1-7 Figure 3-1 Figure 3-2 Figure 4-1 Figure 4-2 Figure 5-1 Figure 5-2 Figure 5-3 Figure 6-1 Figure 6-2 Figure 6-3 Figure 7-1 Figure 7-2 Figure 7-3 Figure 7-4 Figure 8-1 Figure 8-2 Figure 8-3 Dynamic compressors have at least two control elements . . . . . . . . Basic compressor control system . . . . . . . . . . . . . . . . . . . . . . . . . . . Multi-section compressor with shared recycle valve . . . . . . . . . . . . . Multi-section compressor with sidestreams . . . . . . . . . . . . . . . . . . . . Simplified P&ID for compressors operating in series . . . . . . . . . . . . . Simplified P&ID for compressors operating in parallel . . . . . . . . . . . . Antisurge Controller functional diagram . . . . . . . . . . . . . . . . . . . . . . . 15 15 16 16 17 18 20
Analog input signal processing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 Communication with other controllers . . . . . . . . . . . . . . . . . . . . . . . . 48 Using dual flow transmitters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 Compensating Po for a suction control valve . . . . . . . . . . . . . . . . . . 56 Defining the minimum safe flow as a function of head. . . . . . . . . . . . 64 Proximity to surge for a fixed-geometry compressor . . . . . . . . . . . . . 65 Proximity to surge for a variable-geometry compressor. . . . . . . . . . . 66 Typical control lines for antisurge control responses . . . . . . . . . . . . . 71 Dead-zone error (e) as a function of the DEViation . . . . . . . . . . . . . . 78 Typical Recycle Trip response . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 Imaginary orifice coefficients and equivalent flow measurements . . . Calculating equivalent flows when suction flow is measured. . . . . . . Calculating equivalent flows when discharge flow is measured. . . . . Setting Primary Capacity Control Thresholds . . . . . . . . . . . . . . . . . . 85 88 90 92
Output transformations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97 Valve flow characterization . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98 Valve dead band compensation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 99
List of TablesTable 2-1 Table 3-1 Table 3-2 Table 3-3 Table 3-4 Table 4-1 Table F-1 Operating states. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 Available symbols for measured variable labels . . . . . . . . . . . . . . . . Functions for OUT2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Discrete input functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Discrete output functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41 42 44 46
Available calculated variable readouts. . . . . . . . . . . . . . . . . . . . . . . . 60 Analog inputs required by each fA Mode . . . . . . . . . . . . . . . . . . . . . 151
September 2005
IM301 (6.1.3)
10
Contents
Symbols and AcronymsMany of the terms and phrases represented by the following symbols and acronyms are defined in the Glossary/Index (see page 213): p a A ACR ACS AD1 to AD8 b CCC CH1 to CH8 CPU CR1 to CR5 CRD CRI CRI CRLD CRP CRPC CRRT CRSO CRC CRIC CV D1 to D7 DCS dev DEV DEV'September 2005
guide vane angle polytropic efficiency polytropic head exponent mechanical power loss series load-sharing domain selection variable Antisurge Control Response Actuator Control Signal Analog-to-Digital variables width coefficient for margin of safety, sometimes called Total b Compressor Controls Corporation analog input CHannels Central Processing Unit Control Relays (discrete outputs) Derivative Control Response accumulated Integral Control Response Integral Control Response Loop-Decoupling Control Response Proportional Control Response Primary Capacity Control Response Recycle Trip Control Response Safety On Control Response Cyclic Redundancy Checksum Cold-Recycle (flow) Indicating Controller Control Variable or Check Valve Discrete Inputs Distributed Control System distance between operating point and specified control line distance between operating point and surge control line parallel compressor load-balancing variableIM301 (6.1.3)
Series 3 Plus Antisurge ControllerdevRT devSL devSO devTS DO1 to DO5 DPT e EEPROM ESD fA FIC FIOM FT FY GTIC Hp hr I/O I/P IRF IT IVP jr J k L LD LED LSIC M N Ne distance between operating point and Recycle Trip control line distance between operating point and surge limit line distance between operating point and Safety On control line distance between operating point and Tight Shutoff control line Discrete Outputs (control relays) Differential Pressure Transmitter error (control loop deviation) Electrically Erasable Programmable Read-Only Memory Emergency ShutDown Application Function Flow Indicating Controller Field Input/Output Module Flow Transmitter Flow Transducer Gas Turbine (fuel) Indicating Controller polytropic Head reduced polytropic head Input and Output circuits Current-to-Pneumatic signal converter Intended Recycle Flow Current Transmitter Intended Valve Position reduced power consumption power consumption isentropic exponent series compressor load-balancing variable Loop Decoupling Light Emitting Diode
11
Load-Sharing Indicating Controller (slave Performance Controller) Molecular weight, occasionally Motor rotational speed (generally, the Number of revolutions per unit time) equivalent speed
September 2005
IM301 (6.1.3)
12
ContentsNe,s NO/NC OP OutF OUT1 and OUT2 P Pac Pc Pc Pd Pdh Pfe Po Po,ac Po,c Po,d Po,r Po,s Po,ss Ps Pss PCB PI PIC PID P&ID POC psi PT PV1 to PV8 Q equivalent speed relative to suction temperature Normally-Open/Normally-Closed Operating Point Output Failure analog OUTputs Pressure Aftercooler Pressure Compensating Pressure for mass flows Pressure rise across a Compressor Discharge Pressure Discharge Header Pressure Pressure at the flow measuring element Pressure drop across an Orifice plate (flow measurement) Flow measurement downstream from an aftercooler Calculated flow measurement Discharge flow measurement Reported flow measurement Suction flow measurement Sidestream flow measurement Suction Pressure SideStream Pressure Printed Circuit Board Proportional-Integral Pressure Indicating Controller Proportional-Integral-Derivative Piping and Instrumentation Diagram Performance Override Control pounds per square inch Pressure Transmitter Process Variables volumetric flow
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge ControllerQd qr qr,d qr,s Qs R RAM Rc Rt RCS rpm RT RTL RTM S Ss SCL SCM SCS SL SLL SM SO SOL SOM ST STIC SV1 to SV8 T Tac Tc TdSeptember 2005
13
volumetric flow in discharge reduced volumetric flow reduced volumetric flow in discharge reduced volumetric flow in suction volumetric flow in Suction universal gas law constant Random Access Memory Compression Ratio Temperature Ratio Redundant Control Selector revolutions per minute Recycle Trip Recycle Trip Line Recycle Trip Margin proximity to the surge control line (1 - DEV) Slope of the operating point line relative to the surge limit line, represents proximity to surge limit Surge Control Line Surge Control Margin Station Control Signal Surge Limit Surge Limit Line Safety Margin Safety On Safety On Line Safety On Margin Speed Transmitter Steam Turbine (speed) Indicating Controller Signal Variables Temperature AfterCooler Temperature Compensating Temperature for mass flows Discharge TemperatureIM301 (6.1.3)
14
ContentsTs Tss TIC TSL TSM TT TTC U4 , U5 UIC UsrQ V Vac Vdc W Wr X, Y Z ZT Suction Temperature SideStream Temperature Temperature Indicating Controller Tight Shutoff Line Tight Shutoff Margin Temperature Transmitter Total Train Control User-defined argument variables for control line (f4 ) and general (f5 ) characterizing functions Antisurge Controller (User-defined multi-variable Indicating Controller) net mass flow rate Voltage alternating-current Voltage direct-current Voltage mass flow rate, also Watt recycle mass flow rate generic coordinates for a compressor map, also the argument and result of a characterizing function [Y = f(X)] compressibility, also linear (Z-axis) position position Transmitter
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge ControllerIM301
15
Chapter 1
Series 3 Plus Antisurge Controlleruser manual
Overview
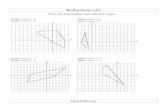
This chapter summarizes this controllers applications and features.Blowoff Recycle Discharge Suction Suction Discharge
Figure 1-1
Dynamic compressors have at least two control elementsAs shown in Figure 1-1, a centrifugal or axial compressor requires at least two control loops, one to regulate its through flow and one to regulate its antisurge (recycle or blow-off) flow.
Applications
FY
FT
PT
TT
TT
PT
PT
PIC
UIC
FY
PIC Performance Controller UIC Antisurge Controller
Figure 1-2
Basic compressor control systemIn a single-section compressor application, an Antisurge Controller can be combined with a Performance Controller to provide precise capacity control with minimum recycle or blowoff whether the speed, geometry (guide vane angle), gas composition, and inlet conditions are fixed or variable. In the example shown above (Figure 1-2), the Performance Controller regulates a constant speed compressors discharge pressure by positioning a throttle valve in the suction line,
September 2005
IM301 (6.1.3)
16
Chapter 1: Overview
FT
PT
PT
FT
PT
PT
FY
UIC 1
Port 1
UIC 2
UIC1 Valve-Sharing Master Antisurge Controller UIC2 Valve-Sharing Companion Antisurge Controller
Figure 1-3
Multi-section compressor with shared recycle valvewhile the Antisurge Controller opens the recycle valve just enough to prevent surge. To adequately protect a multisection compressor, especially one that has sidestreams, each section should be protected by its own controller. Series 3 Plus Antisurge Controllers can protect such a machine even when it has only one recycle or blowoff valve (see Figure 1-3) or the flow through some sections cannot be directly measured (see Figure 1-4).
FT
PT
PT
FT
PT
FT
PT
UIC 1
Port 1
UIC 2
Port 1
UIC 3
FY
FY
FY
Figure 1-4
Multi-section compressor with sidestreams
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
17
FY
FY
FT PT
TT PT
TT
FT PT
TT PT
TT
PT
SICPort 1
LSICPort 1
UIC
FY
SICPort 1
LSICPort 1
UIC
FY
PIC
Port 2
Port 2
LSIC Load-Sharing Controller SIC Speed Controller
PIC Station Pressure Controller UIC Antisurge Controller
Figure 1-5
Simplified P&ID for compressors operating in seriesWhen several compressors are connected in series or in parallel to achieve a higher flow rate or compression ratio, networks of Antisurge and Performance Controllers can distribute the total load and prevent surge with a minimum of recycling. In such systems (see Figure 1-5 and Figure 1-6), each compressor or compressor section is equipped with a dedicated Antisurge Controller. In a parallel loadsharing application, Antisurge Controllers can also be used to regulate the flow through a cold recycle loop. In all of these applications, Antisurge Controllers can also provide limiting control of their maximum discharge and minimum suction pressures. If a recycle valve would also be the best control element for another limiting variable, a Performance Controller can serve as an auxiliary limiting control loop for an Antisurge Controller.
September 2005
IM301 (6.1.3)
18
Chapter 1: Overview
FY
FY FT
PT
TT
PT
TT
SIC
LSIC
UIC Port 1
FY
Port 2
Hot Recycle Cold Recycle
PT
TT FY
FY
PIC
TIC
Port 1
CRIC
Hot RecyclePort 2 Port 1 SIC LSIC UIC FY
FY
FY FT
PT
TT
PT
TT
CRIC Cold Recycle Controller LSIC Load-Sharing Controller PIC Station Pressure Controller
SIC Fuel Controller TIC Temperature Controller UIC Antisurge Controller
Figure 1-6
Simplified P&ID for compressors operating in parallel
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
19
Major Features
This software revision (756-004) offers the following features: Proximity to Surge Calculations that are invariant to changing process conditions Fallback Strategies that can provide continued protection when the analog and serial communication inputs required by the chosen proximity-to-surge calculation fail Closed- and open-loop Control Responses that collectively protect against surge-induced compressor damage and process upsets without sacrificing energy efficiency or system capacity Limiting Control features that can increase the recycle or blowoff rate as needed to maintain minimum suction and maximum discharge pressures and to help regulate a Performance Controllers capacity or performance override control variable Loop Decoupling that minimizes adverse interactions between a compressors capacity and antisurge control loops Valve Sharing and Equivalent Flow Calculations for multisection or series compressor applications Load Sharing for compressors operating in series or in parallel Operating States that protect the compressor while it is running or stopped and during startups and shutdowns Automatic or Manual Operation from the Front Panel or a host computer or control system Redundant Controller Tracking that allows one Antisurge Controller to serve as an on-line backup to another Basic or Extended I/O Hardware Configurations Analog and Discrete I/O ports that can be assigned functions appropriate to each application Control Valve Features that adapt the analog output to virtually any recycle valve, allow either that signal or its low clamp to track an analog input, and test its accuracy Serial Communication with companion Series 3 Plus Controllers, operator workstations, and Modbus host systems Configuration and Tuning from either the Engineering Panel (from which three alternate parameter sets can be stored and recalled) or from a computer workstation Please refer to the Series 3 Plus Antisurge Controller Revision History [DS301/V] for information about previous revisions.
September 2005
IM301 (6.1.3)
20
Chapter 1: OverviewAnalog Inputs
Calculated and Process Variables Pd Ps
Application Function (fA Mode) Ss
Safety On Surge Detector n b2
SP2
SP3 f4(X) 1S DEV Dead Zone e2 e3 e1 S dSs /dt b
b1
b3 Td0 dSs /dt Derivative Response Recycle Trip Response Valve-Sharing
PI Algorithm
Valve-Sharing and Performance Override PIs Loop Decoupling Interacting PIDs & RTsACR (IRF)
RTs Primary Capacity Control Station Controller Control Signal Parallel ACSs Recycle Balancing
Valve Flow Characterizer IVP Remote Low Output Clamp Valve Dead Band Compensation
Output Clamps
Manual
Tight Shut Off
Output Reverse
OUT Readout
Output Tracking
or ACS
Figure 1-7
Antisurge Controller functional diagram
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
21
Proximity to Surge Calculations
In order to prevent surge with a minimum of recycling, a controller must accurately determine how close the compressor is operating to its surge limit. But that distance is not something that can be directly measured. Instead, it is a function of compression ratio, flow rate, rotational speed, guide vane angle, and gas pressure, temperature, and composition. The Antisurge Controller can use a variety of functions to calculate proximity to surge, each of which embodies a different set of simplifying assumptions to define a coordinate system in which the surge limit is invariant to process changes (see Calculated Variables on page 51, Application Function on page 63, and Appendix F).
Fallback Strategies
The Antisurge Controller also offers numerous fallback strategies for calculating proximity to surge when analog input or serial port failures preclude using the selected fA mode. This enables it to provide continued compressor protection until the failed inputs can be restored (see Fallback Strategies on page 67). The Antisurge Controller employs a unique combination of control responses that can prevent surge without needlessly upsetting your process or requiring a large, energy-wasting surge control margin: A proportional-integral response protects the compressor from small, slow disturbances when it is moving toward surge and closes the antisurge valve when the machine is moving away from its surge limit (see Antisurge PI Response on page 79). Fast disturbances are countered by temporarily raising the surge control margin when the compressor is moving rapidly toward its surge limit, which will increase the recycle rate only when operating close to that limit (see Derivative Response on page 74). If the combined PI and derivative responses fail to maintain an adequate margin of safety, an open-loop response ratchets the control valve open to provide the rapid increase in flow needed to prevent surge (see Recycle Trip Response on page 80). Finally, if unanticipated circumstances do produce a surge, the surge control margin is permanently increased, which quickly stops the surging and prevents its reoccurrence (see Safety On Response on page 75).
Control Responses
Limiting Control
The recycle rate can be increased as needed to limit the discharge and suction pressures (see Pressure Limiting on page 82). If there are other process constraints that can be satisfied by opening the antisurge valve, additional limiting loops can be implemented using companion Performance Controllers (see Auxiliary Limiting on page 83 and Performance Override on page 83).
September 2005
IM301 (6.1.3)
22
Chapter 1: Overview
Loop Decoupling
The controller can counter the potentially destabilizing effects that can result from interactions between the various control loops regulating a single compressor by adjusting its control signal in response to changes in the control responses of companion controllers (see Loop Decoupling on page 83). When a multisection compressor (or group of compressors operating in series) has only one recycle or blowoff valve, you should still install a dedicated Antisurge Controller for each section. The controller that actually manipulates the recycle valve can then keep it open enough to protect whichever section is closest to its surge limit (see Valve Sharing on page 91). When the flow through one section of a compressor (or group of compressors operating in series) cannot be measured, its Antisurge Controller can calculate proximity to surge by combining a sidestream or recycle flow measurement with the flow reported by a companion controller protecting an adjacent compressor section (see Equivalent Flow Measurements on page 85). Networks of Performance and Antisurge Controllers can be used to regulate and protect a group of compressors operating in series or in parallel. Such control systems: vary the compressors performance and recycle rates as needed to regulate the Station Controllers capacity control variable (see Primary Capacity Control on page 92); raise the recycle rates to limit the station performance override variable (see Performance Override on page 83); and prevent any compressor from recycling until all are operating at their surge limits, and balance their loads when operating at a distance from those limits (see Load Balancing on page 93). For parallel compressor systems, the Antisurge Controllers can also equalize the recycle rates (see Recycle Balancing on page 94) and a dedicated Antisurge Controller can regulate the flow through a common recycle cooler (see Cold-Recycle Control on page 95).
Valve Sharing
Equivalent Flow Calculations
Load Sharing
Operating States
Compressor startups and shutdowns are sequenced primarily by the Performance Controller. The Antisurge Controller participates by holding its control valve in a position that minimizes the risk of surge (see Operating State on page 103): The compressors status can be monitored via flow, pressure, and/or speed inputs or by a companion controller. When a shutdown is initiated or detected, the Antisurge Controller can either ramp the recycle valve open or open it as quickly
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
23
as possible. It will then hold that valve fully open as long as the compressor is stopped, in order to minimize the possibility of back flow and reverse rotation. It can also fully close the recycle valve so purge gas can be forced through the compressor. When a startup is initiated or detected, the Antisurge Controllers normal operation will slowly close its control valve to a position that minimizes recycle flow as efficiently as possible.
Automatic or Manual Operation
Because the Antisurge Controller is an automatic protective device, its operation requires little (if any) operator intervention. However, both its status and your process can be monitored using various Front Panel, computer control, and input/output features (see Continuous Operation on page 26). In addition, the recycle valve position can be directly controlled from the Front Panel or by a Modbus host (see Manual Operation on page 32). Dual redundancy (that is, one-to-one fault tolerance) is a standard feature of most Series 3 Plus Controllers. This means you can install one Antisurge Controller as an on-line hot backup to another, ready to take over instantly if the first should fail. In a typical application (see Redundant Control on page 36), the two controllers are interconnected via a Redundant Control Selector (RCS) that connects the control element to the primary controller. The backup controller then tracks (that is, monitors and duplicates) the operating state and control response of the primary controller via the Port 1 serial communications link. If that controllers fault relay de-energizes, the system bumplessly transfers control of your process to the back-up unit.
Redundant Controller Tracking
Hardware Congurations
The Antisurge Controller can use either of two compressor controller configurations (see Hardware Options on page 37). The basic configuration provides back-panel terminals for its I/O circuits, while the extended I/O option uses external wiring modules. Each of the eight analog inputs (see Analog Inputs on page 38) is tested by comparing it to individually-defined alarm limits. Although the inputs for most features are fixed, some can use any appropriate or otherwise unused channels. Analog OUT1 is usually used to position a recycle or blow-off valve, while OUT2 can drive a remote display for a user-selected variable (see Analog Outputs on page 42). One or two of the five control relays can be set up to signal hardware and self-test failures, the others can be assigned a variety of controller and process conditions (see Discrete Outputs on page 45 and Fault Relays on page 45). In contrast, the functions of the seven
Analog and Discrete I/O
September 2005
IM301 (6.1.3)
24
Chapter 1: Overviewdiscrete inputs (see Discrete Inputs on page 44) are predefined and cannot be changed.
Control Valve Features
The actuator control signal can be clamped, adapted to a direct or reverse, linear, quick-opening, or equal-percentage valve, and compensated for a deadband or low-flow leakage (see Output Variables on page 97). The controller can also detect an excessive deviation of the actuator control signal from its intended value (see Output Loopback Test on page 42) or of the recycle valve from its intended position (see Valve Position Test on page 43). The Antisurge Controller also offers low and absolute signal select algorithms for sharing control of the recycle valve with another device (see Remote Low Output Clamp on page 100 and Output Tracking on page 102).
Serial Communication
All Series 3 Plus Controllers have four Serial Ports (see page 48): Ports 1 and 2 are used to coordinate their actions with other CCC controllers (see Limiting Control, Loop Decoupling, Equivalent Flow Calculations, Valve Sharing, Load Sharing, Operating States, and Redundant Controller Tracking). Ports 3 and 4 are used for computer communication and control (see Continuous Operation on page 26 and the Series 3 Plus Antisurge Controller Modbus Data Sheet [DS301/M]) using Modbus RTU commands. This allows a host control system or a computer running controller support software (such as our COMMAND system) to monitor or even control the operation of your compressor. Some of our support programs can also change the configuration and tuning of the controller. Each Antisurge Controller is adapted to its specific application by assigning values to its configuration and tuning parameters (see Appendix A). This can be done from the Engineering Panel or a computer running one of our configuration programs. If your application requires routine changes to a controllers configuration or tuning, up to three sets of alternate parameter values can be stored. Engineering Panel procedures are provided for defining these alternate sets, determining which one is in use, and switching to a different one (see Alternate Parameter Sets on page 106).
Conguration and Tuning
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge ControllerIM301
25
Chapter 2Operator Interfaces
Series 3 Plus Antisurge Controlleruser manual
Operation
This chapter describes the operation of the Antisurge Controller. This section summarizes the features that can be operated via the controllers front-panel, remote control, and Modbus interfaces. The front-panel keys, LEDs, and readouts can be used to select automatic or manual operation, monitor its antisurge and limiting control loops, display and clear the surge count, and display various internal and process variables, as described in the Series 3 Plus Antisurge Controller Operator Interface Description [DS301/O]. The controllers remote control inputs and outputs are primarily for integration with other devices, although they could also be used to implement a limited remote control panel. Discrete Inputs (see page 44) can be used to select the operating state, to trigger output tracking, or to clear the surge count. Discrete Outputs (see page 45) can be connected to external alarms and indicators for various operating conditions. Process variable Analog Inputs (see page 38) can be monitored directly, while some internal variables can be monitored via Analog Outputs (see page 42). The Modbus interface can be used to select automatic or manual operation, monitor the antisurge and limiting control loops, monitor and clear the surge count, change a limited number of configuration parameters, and monitor various internal and process variables, as described in the Series 3 Plus Antisurge Controller Modbus Data Sheet [DS301/M].
Note:
Because all three interfaces are always active, the compressor can be monitored and controlled using any combination of their features.
September 2005
IM301 (6.1.3)
26
Chapter 2: Operation
Continuous Operation
When operating automatically in its Run state, the controller varies the Valve Position to satisfy its Surge Protection, Pressure Limiting, Performance Limiting, and Load Sharing objectives. Because little intervention is needed, the Operator Interfaces serve primarily as a means of monitoring its operation (and that of the compressor). This state is selected whenever specified inputs (usually speed, flow, and pressure) indicate the unit is running, the controllers own D2 and D6 inputs are cleared, and a companion controller (if one is designated) is also operating in its Run state. The AUXiliary readout will then display the operating state as Status RUN and any Run relays and the Modbus Run discrete bit will be set.
Valve Position
The position of the recycle valve can be monitored via the OUT readout, Modbus Displayed OUT register, or analog output OUT1. The Modbus High Clamp or Low Clamp discrete bit will be set if the control response equals the corresponding clamp, and any Valve Open relays will be set if that response exceeds its low clamp. If an analog Remote Low Output Clamp (see page 100) has been set up, the Tracking LED will flash whenever that input exceeds the low clamp parameter, regardless of the control response value. A group of Antisurge Controllers protecting the same multi-section compressor can use serial communications to share a single recycle or blow-off valve (see Valve Sharing on page 91). The controller that directly manipulates that valve is then referred to as the valve-sharing master, while the rest are called valve-sharing companions. The OUT readout of a valve-sharing companion is always blank, and its actuator control signal (ACS) cannot be manipulated manually or by a Modbus host. However, its Modbus Displayed OUT input register will track the master controllers ACS. This feature can also be applied to compressors that operate in series with a common recycle or blow-off valve. In that case, some of their compressors might be loaded while others are stopped or idled. The master will modulate that valve as required to protect the compressors whose controllers are operating in the Run state. If its own compressor is unloaded but one or more others are not, it will operate in the Run state but will display it as Status OFF.
Valve Sharing
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
27
Surge Protection
The DEViation between the compressors operating point and the controllers surge control line (SCL, see Chapter 5) can be monitored via the DEV readout, DEViation register, or analog OUT2: If DEV is at or near zero, the compressor is operating close to or on its SCL. If a non-zero Dead Zone (see page 78) has been defined, OUT should remain steady. Otherwise, it will vary as needed to keep the operating point exactly on that line. When DEV is positive, the compressor is operating to the right of its SCL. If the recycle valve is not fully closed, the Antisurge PI Response (see page 79) will gradually close it. If DEV becomes negative, the compressor is operating to the left of the SCL, where the distance between the operating point and surge limit is less than desired. As long as it does not get too close to the actual surge limit, the controller will rely on its PI algorithm to raise the margin of safety back to the desired level. The distance between the SCL and the actual surge limit depends on the rate at which the compressor is approaching its surge limit (see Derivative Response on page 74) and the number of times it has surged (see Safety On Response on page 75). It can be displayed on the front-panel AUX readout by pressing the SCROLL key to scroll from the STATUS display to the Total B= ##.# variable, where ##.# is the distance between the SCL and SLL in percent. The controllers analog inputs can be monitored via the front-panel AUXiliary readout Measured Variables menu or Modbus Channel # registers. Additional process conditions calculated by the selected proximity-to-surge algorithm can be monitored via the Calculated Variables menu and various Modbus registers (for example, the Pressure Ratio, Temperature Ratio, and Sigma). A continuing or sudden drop in the DEViation will trigger the Recycle Trip Response (see page 80). The yellow RT LED will then light and any RT relays and the Modbus Recycle Trip discrete bit will be set while the controller ratchets open the antisurge valve. Once a minimum safe DEViation is restored, the RT relays and discrete will be cleared, the RT LED will go out (after a fixed delay), and the RT response will decay to zero. A Recycle Trip action should not be viewed as a cause for alarm, it simply means the compressor is operating close enough to its surge limit to justify aggressively increasing the recycle rate. By allowing your compressor to safely operate that close to its surge limit, this feature actually saves you money by reducing recycling costs. If for some reason the compressor actually goes into surge, the controller will detect the characteristic rapid fluctuations of head and/or flow and trigger its Safety On Response (see page 75). The red SO indicator will then light and any SO relays and the Modbus Safety
Note:
September 2005
IM301 (6.1.3)
28
Chapter 2: OperationOn discrete and coil bits will be set to indicate the surge control margin has been increased to prevent additional surges from occurring. Each detected surge increments the cumulative and event Surge Counters (see page 76) and triggers a further increase in the surge control margin. The cumulative count can be displayed in the ALT readout by pressing DISPLAY SURGE COUNT, and can also be monitored via the Surge Count register. Any Surge Event relays are set if the event count reaches a user-defined threshold within a specified period of time (if not, that count is automatically reset). If a Safety On condition is indicated, you should determine why that response was tripped and whether or not the controller needs to be reconfigured to provide a larger, permanent margin of safety. Once that determination and any needed reconfiguration are completed, you can reset the surge counts to zero and restore the initial surge control margin by pressing the RESET SAFETY ON key, asserting discrete input D5, or clearing the Modbus Safety On coil.
Warning!
Do not reset the Safety On response until the cause of any surging has been determined and corrected. In a system with multiple control elements, the actions of any controller can affect the control variables of the others. To minimize such destabilizing loop interactions, Antisurge Controllers monitor changes in the control responses of specified companions and adjust their own output signals to keep their compressors operating at the same distance from surge.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
29
Pressure Limiting
If either the discharge pressure is too high or its suction pressure is too low (or both), and any Limit relays and the Modbus Limit discrete bit will be set. The controller will then increase the recycle rate (see Pressure Limiting on page 82), which should raise the suction and lower the discharge pressure. The yellow Limit LED will light if the limiting loop opens the recycle valve faster than the surge protection features otherwise would. If you press the DISPLAY LIMIT key, the AUX readout will identify the out-of-range pressure, the DEV readout will display its value, and the ALT readout will display its set point. You can also monitor those pressures via the corresponding Modbus Channel # registers, while the parameters that define their set points can be monitored and even changed via the Pd Limit and Ps Limit holding registers.
Performance Limiting
An Antisurge Controller can be configured to help a companion Performance Controller counter excessive deviations of its performance override control variable by increasing the recycle or blow-off flow (see Performance Override in Chapter 6). At such times, the frontpanel ALT readout displays the POC acronym and the Modbus POC Active discrete bit is set. In a Series 3 Plus Control System for multiple compressors operating in series or in parallel, a Station (master Performance) Controller regulates a header pressure or flow by indirectly manipulating the throttle and antisurge control elements of the individual compressors (as described in the Station Controller section in Chapter 2 of IM302). In such a system, each Antisurge Controller will increase the recycle rate of its compressor (which will reduce the discharge header pressure and flow) when its operating point is already near or on its surge control line and less throughput is needed (which would move the compressor even closer to surge). Under any other conditions, changes in the compressor networks throughput are achieved by manipulating the control elements of the Load-Sharing Performance Controllers.
Load Sharing
September 2005
IM301 (6.1.3)
30
Chapter 2: Operation
Sequencing Operation
The loading and unloading of a compressor is sequenced primarily by its Performance Controller (see Chapter 2 of IM302). Startups and shutdowns are usually sequenced by the controller for the compressors driver. Provided neither output nor redundant controller tracking is active (see Tracking States), an Antisurge Controller will participate mainly by selecting an appropriate operating state (see Table 2-1): While its machine is loaded, an Antisurge Controller operates in its Run state (see Continuous Operation), which modulates the recycle valve to prevent surge with minimal recycling. When a Shutdown is initiated, the recycle valve is either ramped open or opened as fast as possible. While its machine is stopped or idling, an Antisurge Controller operates its Stop State, which holds the recycle valve fully open. If the purge input is then asserted, the controller selects its Purge State, which holds the recycle valve fully closed. When a Startup is initiated, the controller simply selects its Run state. Its PI loop will then slowly close the recycle valve.
Shutdown
An Antisurge Controller can be set up to open the recycle valve to its high clamp position (see Operating State on page 103) when the compressor is idled or shut down: An emergency shutdown immediately opens that valve. A normal shutdown usually ramps it open, although it can be configured to open it immediately and will always do so if the operating point moves to the left of the RTL.
Table 2-1
Operating statesName DisplayRUN Run OFF STOP Stop ESD Purge Track PURGE TRACK
DescriptionThe compressor is loaded and the control response is being varied to prevent surge. This compressor section is unloaded but the valve is being modulated to protect another. A normal shutdown was or is being used to idle or shut down the compressor. An emergency shutdown was used to idle or shut down the compressor. The compressor is unloaded but the recycle valve is fully closed. Actuator control signal is tracking the output of another device or controller.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
31
In either case, any Run relays and the Modbus Run discrete are immediately cleared, the operating state display changes to Status STOP or Status ESD, and the Surge Counters (see page 76) are reset to zero (if so configured). An ESD can be triggered only by this controllers own D2 discrete input. A normal shutdown can be triggered by its own D6 discrete input, by the stop or shutdown sequence of a companion controller, or by a process condition that indicates the compressor is being stopped or idled (abnormally low flow, head, or rotational speed).
Stop State
While its compressor is stopped or idling, an Antisurge Controller will operate in its Stop state with all Run indicators cleared. It then holds the recycle valve fully open: If the compressor is idling, this minimizes the drive power and risk of surge. The displayed DEViation should show a positive value perhaps as great as .A24 (1.024). If the compressor is stopped, this minimizes any reverse flow or rotation that might occur if the discharge check valve leaks. The DEViation display will be unpredictable and perhaps erratic, but can be safely ignored (a stopped compressor cannot surge). The operating status will display as STOP or ESD, depending on how this state was selected. Manual Operation can be initiated only if its selection while operating in this state is enabled.
Purge State
If the controller is operating in its Stop state, asserting either its own D3 discrete input or that of a designated companion controller will select the Purge state. This sets the actuator control signal to zero (100 percent for a signal-to-close valve), thus completely closing the recycle valve. Purge gas can then be forced through the compressor instead of bypassing it through the recycle line. The AUXilliary readout will display this operating state as Status PURGE. Requesting the Purge state while the compressor is idling not only leaves the unit unprotected but might even trigger a surge. An Antisurge Controller operating in its Stop state will automatically switch to the Run state if its D2 and D6 discrete inputs are cleared, the designated companion controller (if any) selects its Run state or initiates its startup sequence, and the head, flow, and speed exceed user-defined minimums (thus indicating the compressor is running). This immediately sets any Run relays and the Modbus Run discrete bit and changes the operating state display to Status RUN. The PI response will then gradually reduce the recycle flow as far as surge protection and process limiting conditions permit.
Warning!Startup
September 2005
IM301 (6.1.3)
32
Chapter 2: Operation
Manual Operation
When manual operation is selected, momentarily pressing the Raise or Lower key will change the actuator control signal by 0.1 percent, holding either down changes it at a steadily increasing rate. The resulting value can be monitored via the OUT readout, an analog output assigned the Out function, or the Displayed OUT input register. Alternately, the control signal can be set directly by writing to the Actuator CS holding register. Although the Output Clamps (see page 100) do not apply in manual, the Remote Low Output Clamp (see page 100) does. Thus, you can raise the control signal above the high or reduce it below the low clamp parameter, but cannot reduce it below an analog low clamp. While in manual, the controller will continue to calculate and display the deviation between the operating point and the surge control limit, so you can tell if you are moving the compressor too close to surge by watching the DEV readout. If you inadvertently move the operating point to the left of the Recycle Trip line, the RT LED lights and the controller reverts to automatic operation. It will then remain in automatic even after an adequate safety margin is restored. The controller will also continue to monitor its operating state inputs and the AUXiliary readout will continue to display the selected state (for example, Status RUN). If those inputs dictate a transfer out of the Run state, the controller will revert to automatic. However, you can then switch back to manual by pressing the AUTO/MAN key, provided manual operation in the newly selected state is enabled. Although Pressure Limiting is suspended during manual operation, the Limit LED and any Limit relays will continue to indicate whether or not the suction and discharge pressures are within their respective limits, and you can still use the DISPLAY LIMIT key to display these control variables and their set points.
Initiating Manual
Manual operation can be selected at any time unless the controller is operating in its Stop or Purge state and manual operation in those states has not been enabled (see Manual Override). However: If manual operation and Output Tracking are both selected, the remote device will control the output signal. In a Redundant Control system, only the active controller can be manually operated (the backup will track that selection). Manual is initiated by pressing the AUTO/MAN key or clearing the Modbus Automatic coil. The Manual LED then lights and the Auto LED, any Auto relays, and the Automatic coil and discrete bit all clear.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
33
Restoring Automatic
Pressing the AUTO/MAN key while in manual or setting the Modbus Automatic coil initiates a bumpless return to automatic control. The Manual LED then clears and the Auto LED, any Auto relays, and the Automatic coil and discrete bit all set. This action will not change the actuator control signal unless it is above its high clamp or below its low clamp, in which case it will jump back to that clamp. In addition, the Valve Dead Band Compensation (see page 99) feature will remember which direction the operator last moved the output while in manual and resume operation accordingly.
Manual Override
To prevent surge while the controller is in manual, it will revert to automatic if the operating point moves to the left of the Recycle Trip control line (RTL). However, you can enable an override of this behavior (see Manual Override on page 105), in which case the controller will remain in manual until the operator restores automatic operation (even if the compressor surges). To indicate this danger, the front-panel Man LED will flash and any relays assigned the MOR function will trip, regardless of the DEViation, whenever manual is selected while that override is enabled. If the operating point then moves to the left of the RTL, the RT LED will light and remain on until an adequate safety margin is manually restored. We advise you not to permanently enable the Manual Override parameter, because it disables all surge protection while in manual. If the Manual Override is enabled, the controller will also remain in manual when the operating state inputs dictate a transfer out of the Run state and manual operation can be initiated even when the Stop or Purge state is selected. When manually operating the controller via its Modbus interface, you can determine whether or not Manual Override is enabled by reading the Manual Override coil or discrete, and can enable and disable this feature by setting and clearing that coil. If the Manual Override is disabled (as recommended), the Manual While Stopped parameter determines whether or not manual can be initiated while the Antisurge Controller is in its Stop or Purge state.
Caution:
September 2005
IM301 (6.1.3)
34
Chapter 2: OperationIn addition to a General Fault, which would be indicated via the Fault LED and relays, the Antisurge Controller can use front-panel LEDs, assignable relays, and Modbus discrete bits to indicate Serial Communication Errors, Analog Input or Transmitter Failures, Output Failures, and Valve Position Failures. It will also indicate a Fallback Condition if analog or serial failures prevent it from calculating the selected proximity-to-surge function. Each Series 3 Plus Controller has a watchdog circuit that must be regularly reset by its control program. If it does time out, it will deenergize the fault relay and reset the CPU chip, thus causing the control program to restart: If that restart succeeds, it will reset the timer, clear the relay, and temporarily set the Modbus Reset discrete. The Engineering Panel will beep and display Reset. If it fails, the fault relay will remain de-energized and the Front Panel will light its Fault LED (and turn the other thirteen off). This can indicate either a software error or a hardware problem that prevents the control program from running. If the fault relay has also been assigned a second function (see Fault Relays on page 45), that condition will not light the Fault LED. If that assigned function is one that has its own LED, you can tell why the fault relay has tripped by looking at the Front Panel.
Fault Indicators
General Fault
Caution:Serial Communication Errors
The controllers output signal is totally unpredictable when a watchdog fault is indicated. Process disruptions or compressor damage can result if it is not immediately disconnected from your process. When the controller fails to detect expected serial transmissions, it will light the ComErr LED and set any Serial Communication Error (SerC) relays and the Modbus Port 1 Fail or Port 2 Fail discrete (see Serial Communication Errors on page 49). Because the exact meaning of these conditions depends on which features have been enabled, their interpretation will be highly site specific. Loss of Port 2 communications will disrupt load-sharing and performance override control. A Port 1 serial error can also disrupt those features, as well as loop decoupling, multi-section compressor surge protection and valve sharing, automatic sequencing and operating state selection, and redundant control.
Analog Input or Transmitter Failures
Whenever one or more analog inputs is beyond its valid range, the controller lights its TranFail LED and sets any Transmitter Failure (Tran) relays and the Modbus Tran Fail discrete (see Transmitter Testing on page 39). This condition usually indicates a failure in the input loop (transmitter, signal wire, and Analog PCB circuit), but might also be used to alarm undesirable process conditions.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge ControllerOutput Failures
35
If the controller detects a difference of more than five percent between the intended and loopback values of the control signal (see Output Loopback Test on page 42), it will set any Output Failure (OutF) relays and the corresponding Modbus DO State discrete (there is no dedicated bit nor front-panel LED for this condition). This condition may indicate miscalibration of the input or output circuitry, breaks or poor connections in the wiring between the input, output and final control element, or actual failure of the Analog PCB Assembly. It could be caused by failures in the loop-back circuitry only the actual output signal may in fact have the intended value. Even a genuine output signal miscalibration might not be critical. The controllers integral action can often overcome such a discrepancy, provided it is constant. However, such problems can prevent the controller from fully opening or closing the final control element.
Valve Position Failures
If the measured recycle valve position deviates significantly from its intended value (see Valve Position Test on page 43), the controller will set any Position Failure (PosF) relays and the corresponding Modbus DO State discrete (there is no dedicated bit nor front-panel LED for this condition). Although this condition would be triggered by a malfunctioning valve positioner or position transmitter, it might also indicate miscalibration or failure of the input or output circuitry, breaks or poor connections in the actuator control or position input loop, or a failure of the Analog PCB Assembly.
Fallback Condition
If the controller is unable to calculate the selected proximity-to-surge function due to an analog input or serial communication failure, it will light its Fallback LED, set its Modbus Fallback discrete, and switch to a simpler function, maintain a minimum flow, or hold its output steady (see Fallback Strategies on page 67). In the latter case, the Auto LED will flash to indicate the controller is operating automatically but is holding its actuator control signal steady.
September 2005
IM301 (6.1.3)
36
Chapter 2: OperationThe Antisurge Controller includes two features that allow an external device to manipulate its actuator control signal (ACS): When Output Tracking is active, the ACS tracks an analog signal from a remote device. When Redundant Control is active, it tracks the ACS of another Series 3 Plus Antisurge Controller. If either feature is active, the operating state will display as Status TRACK and the Tracking LED will either light (redundant tracking) or flash (output tracking). Because they are triggered by discrete inputs that can be monitored directly, there are no relay functions that indicate either of these states. A Modbus host can detect them by monitoring the corresponding DI Condition discretes, and the Tracking discrete is set by redundant but not output tracking.
Tracking States
Output Tracking
The Antisurge Controller can be set up as a signal selector for its final control element (see Output Tracking on page 102), in which case the actuator control signal is kept equal to a designated analog input signal whenever discrete input D4 is asserted. The Auto and Manual LEDs, relays, and bits will indicate which mode the controller will return to when D4 is cleared, and you can change that selection by pressing the AUTO/MAN key or forcing the Automatic coil. In either case, the transfer will be bumpless.
Redundant Control
If one Antisurge Controller has been installed as an on-line hot backup to another (see Redundant Tracking on page 106), it will use serial communications to track the outputs and states of that active controller whenever its own D1 discrete input is cleared. In a typical redundant system, each pair of Antisurge Controllers is interconnected via a Redundant Control Selector (RCS) that monitors their fault relays, controls their D1 inputs, and connects the valve actuator to the selected controllers analog output. If the main controllers fault relay de-energizes, the RCS automatically transfers control of the recycle valve to the backup controller (provided that it has not faulted as well). That controller then initiates control beginning from the last conditions received from the main controller. The RCS also indicates which controller is active by lighting its green MAIN or red BACK-UP LED, and you can manually select the active controller by pressing the Switch to Back-Up or Switch to Main push-button. The RCS will not automatically return control of your process to the main controller after a fault is cleared (this must be done manually) and will never automatically or manually transfer control to a controller that appears to have failed.
Note:September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge ControllerIM301
37
Chapter 3
Series 3 Plus Antisurge Controlleruser manual
Input/Output Features
This chapter tells how to configure the analog and discrete inputs and outputs and serial communication ports.
Hardware Options
The Antisurge Controller uses either the Basic Compressor Controller (BCC) or Extended Compressor Controller (ECC) hardware configuration, as described in the Components and Configurations section in Chapter 1 of IM300/H. Either provides the following input and output circuits: eight Analog Inputs (CH1 to CH8), two standard Analog Outputs (OUT1 and OUT2), seven Discrete Inputs (D1 to D7), five Discrete Outputs (CR1 to CR5), and four Serial Ports (Port 1 to Port 4). When the ECC configuration is used, all I/O terminals are provided on a separately mounted Field Input/Output Module (FIOM), which is connected to an Extended I/O Back Panel by a High-Density Interconnect Cable (HDIC).
Note:Disabling Input Signals
The availability of the discontinued FIOM cannot be guaranteed. As an aid to developing and demonstrating Series 3 Plus Antisurge Controllers, they include a CPU Inputs Lockout [MODE:D LOCK 6] parameter that, when enabled, configures the controller to ignore its analog and discrete inputs (which can then be updated via the Port 3 or Port 4 Modbus serial link). An installed controller should not be operated with LOCK 6 enabled, as that would prevent it from receiving needed input signals.
Caution:
September 2005
IM301 (6.1.3)
38
Chapter 3: Input/Output FeaturesAN IN OFF(e.g., 0 to 10 V)CH (V)
AN IN ON(e.g., 4 to 20 mA)CH (mA)
Sampling Hardware Failed if: < AN IN LOW > AN IN HIGH TEST 4 Failed if: < AN IN LOW > AN IN HIGH TEST 4
Sampling Hardware
AD (%)
AD (%)
SV = AD
SV = 1.25 (AD - 20%)
SV (%)
SV (%)
SV (%)
SV (%)
MV = Min + (Span SV)
PV = Bias + (SV Gain)
MV = Min + (Span SV)
PV = Bias + (SV Gain)
MV
PV (%)
MV
PV (%)
Figure 3-1
Analog input signal processingEach Series 3 Plus Controller is equipped with eight analog inputs. As described in the Analog Input Installation section in Chapter 6 of IM300/H, they are set up as either 0 to 5 Vdc or 4 to 20 mA inputs by installing resistors on either the Field Input/Output Module or setting jumpers on the Analog PCB Assembly (if not using FIOMs). In this manual, we will refer to both the input circuits and their analog signals as Channels 1 through 8 (CH1 to CH8) the meaning in each case should be clear from its context. The processing of these inputs and the terms used to distinguish their intermediate values are illustrated by Figure 3-1: Step 1: The raw analog inputs are converted to equivalent digital values called Analog-to-Digital Variables (AD1 to AD8). Step 2: Transmitter Testing compares each AD variable against its individual alarm limits. Step 3: The AD variables are converted into percent-of-range Signal Variables (SV1 to SV8). Step 4: Gains and biases are then applied to obtain the Process Variables (PV1 to PV8) used by the control calculations. Step 5: The signal variables are also independently scaled to obtain the Measured Variables (MV1 to MV8) displayed by the AUXiliary readouts Analog In Menu.
Analog Inputs
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
39
Analog-to-Digital Variables
The input circuitry converts the analog input signals into equivalent digital values for use by the CPU. Each signal is passed through a hardware filter to remove unwanted high frequency components, and a windowing filter that samples each signal several times per scan cycle and reports the resulting average. Because these values are generated by an analog-to-digital converter, we refer to them as analog-to-digital variables (AD1 to AD8). They are reported to the CPU as percentages of the analog signals full-scale value. For example, a 20 mA signal would be reported as 100 percent, while 4 mA would be reported as 20 percent.
Transmitter Testing
The controller tests each analog input against a user-defined range. If any of them is outside of its range, the front-panel TranFail LED is lit, any Transmitter Failure (Tran) relays are energized and the Modbus Tran Fail discrete is set. You can use the Transmitter Status Test [MODE:D ANIN ] to identify the failed input. This feature is configured by defining the Analog Input Low Alarm Limit [MODE:D ANIN # LOW] and Analog Input High Alarm Limit [MODE:D ANIN # HIGH] for each input, which are set as percentages of the full-scale analog-to-digital variables. For example, you would enter AN IN LOW as 15.0 percent to set the lower limit of a 4 to 20 mA signal to 3.0 mA. Because an analog input can never be higher than 102.4 (A2.4) nor lower than 00.0, setting ANIN HIGH and LOW to these values has the effect of excluding that channel from the transmitter alarm feature. Using these values for unused inputs prevents them from interfering with the proper operation of this feature.
Signal Variables
Each analog-to-digital variable is then converted to a percent-ofrange signal variable according to whether or not the corresponding transmitter uses an offset zero (for example, 4 to 20 mA or 1 to 5 Vdc). Signals that are so offset are scaled as: SV = 1.25 ( AD 20 percent ) Otherwise, the signal variable is set equal to the analog-to-digital variable (AD). In either case, the SV values are constrained to the range 00.0 to 100.0 percent. Higher values are changed to 100.0, lower values to 00.0. You can use the Signal Values Test [MODE TEST 4] to directly examine these signal variables from the Engineering Panel. Any signal that has an offset zero (for example, a 4 to 20 mA input) must be identified by enabling the corresponding Offset Zero Input [MODE:D ANIN #]. Signals that are not offset are identified by disabling the corresponding parameter.
September 2005
IM301 (6.1.3)
40
Chapter 3: Input/Output Features
Process Variables
The analog inputs for some control calculations must be converted to absolute values. For example, the pressure measurements used to compute a compression ratio must be scaled as percentages of the highest absolute pressure either of their sensors can measure. To this end, the controller converts its signal variables into process variables by applying appropriate gains and biases: PV = Gain SV + Bias where: Bias = (Offset 100) / Maximum Gain = Range / Maximum Maximum = absolute measurement corresponding to the highest possible transmitter signal. If there is more than one transmitter of a given type, this should be the largest such value for the group Offset = absolute measurement corresponding to lowest possible transmitter signal PV = Process Variable, expressed as a percentage of absolute maximum Range = span of the transmitter in question The gain and bias for each process variable must be assigned to the corresponding Process Variable Gain [COND:D GAIN #] and Process Variable Bias [COND:D BIAS #]. For unused channels, set the gain to 1.000 (.A00) and the bias to 00.0.
Measured Variables
The AUXiliary Displays Analog In menu is used to display the controllers eight signal variables, scaled to appropriate ranges, along with descriptive labels of your choosing. For example, you might display an inlet temperature signal as:
TempIn:
400
The available choices are set up by each inputs five Measured Variable [COND:D DISPLAY 0] parameters. For example, the DISPLAY 0 1 parameters govern the display of signal variable SV1: Each Measured Variable Display [COND:D DISPLAY 0 #] parameter defines whether the corresponding variable can be viewed (SV1 can be displayed only if DISPLAY 0 1 is On). Each Measured Variable Label [COND:D DISPLAY 0 # ] parameter defines the label that will precede the numeric value of the input. Each can be any combination of eight symbols from Table 3-1. The default labels [see page 5 of DS301/O], can be restored by entering the COND:D DISPLAY 0 0 key sequence.
September 2005
IM301 (6.1.3)
Series 3 Plus Antisurge Controller
41
Each signal variables Measured Variable Minimum [COND:D DISPLAY 0 # LOW] defines the digits shown when it is zero, its Measured Variable Maximum [COND:D DISPLAY 0 # HIGH] defines the digits shown when it is 100 percent, and its Measured Variable Decimal [COND:D DISPLAY 0 # ] defines the decimal point position. Mathematically, this can be stated as: MV = [ Min + ( SV ) ( Max Min ) ] 10n dec
where nSV is the signal variables normalized value. Because the decimal point is a character that requires one of the four display positions, only three digits can be displayed unless that parameter is disabled (Off). In other words, that parameter identifies the digit the decimal should replace (that and all less-significant digits are shifted one position to the right). A value of one corresponds to the right-most, least-significant digit, while four is the left-most, most-significant digit. Thus, if DISPLAY 0 1 HIGH is 3210, the five possible values of DISPLAY 0 1 would yield the following displays when SV1 is 100 percent: 0: 3210 1: 321. 2: 32.1 3: 3.21 4: .321 To obtain the most precise possible readouts, you should always make the DISPLAY HIGH parameters as large as possible. For example, if you want to display three digit numbers from 0 to 600, set DISPLAY HIGH to 6000 and DISPLAY to 1 (for a trailing decimal). This will give more precise readouts than you would get by setting DISPLAY HIGH to 0600 and DISPLAY to 0. If Auxiliary Display Reset [MODE:D LOCK 9] is disabled, Measured Variables will be displayed until another variable is selected. Otherwise, the operating state display is restored 60 seconds after the MENU or SCROLL key was last pressed.
Table 3-1
Available symbols for measured variable labels
space ! " # $ %&'()*+,-./ 0123456789:;?@ ABCDEFGHIJKLMNOP QRSTUVWXYZ[\]^_` abcdefghijklmnop qrstuvwxyzSeptember 2005 IM301 (6.1.3)
42
Chapter 3: Input/Output FeaturesThe Antisurge Controller has two standard analog outputs, both of which are generated as both 4 to 20 mA and 0 to 5 Vdc signals (although only one of these signals can be used for each output): Unless the control response is sent to a companion valve-sharing controller (see Valve Sharing on page 91), OUT1 is used to manipulate the compressors recycle or blowoff valve (see Actuator Control Signal on page 99). OUT 2 is generated as the equivalent of one of the variables listed in Table 3-2, as specified by the Second Output Assigned Variable [COND:D OUT 2]. It can be used to drive a readout or graphical display or be connected to a DCS analog input. The Output Loopback Test can be used to compare the actual output signal to its intended value, while the Valve Position Test can be used to compare the measured and intended positions of the final control element.
Analog Outputs
Table 3-2
Functions for OUT2CodeOut Flow S UsrQ
SignalActuator Control Signal (see page 99) Displayed Flow (see page 61) proximity to Surge Control Line (see page 72) Displayed Net Flow (see page 62)
Output Loopback Test
The controller can be configured to energize one or more discrete outputs to indicate an excessive deviation between the measured and intended values of the actuator control signal. This feature is set up by connecting OUT1 to analog input CH8, as described in the Analog Output Installation section in Chapter 6 of IM300/H. Any discrete output assigned the output failure (OutF) function would then energize if SV8 differed from the intended a
![sim39 - Payam-e-Azadi · 2019-03-21 · °ccŸ¡¢~ dÎccr]‘ccc¨ n ] zg‘ccc~ °cccp =¥cccn] \g=i= z†ccc£ h ¿ccc¡ ˆ“~ »ccc† =‘cccq ] ½ccct†cccš~ig†ccc¤ ¢†ki](https://static.fdocuments.in/doc/165x107/5e41c788f54fc41ee62659dd/sim39-payam-e-2019-03-21-cc-dccraccc-n-zgaccc-cccp-cccn.jpg)