4 Repetitive motion relative to an equilibrium position. 4 Evident in virtually all machines. 4...
31
Repetitive motion relative to an equilibrium position. Evident in virtually all machines. Vibrational loads can exceed static loads by orders of magnitude. Mechanical Vibrations Section 9
-
Upload
sydney-webster -
Category
Documents
-
view
223 -
download
0
Transcript of 4 Repetitive motion relative to an equilibrium position. 4 Evident in virtually all machines. 4...

Repetitive motion relative to an equilibrium position.
Evident in virtually all machines.
Vibrational loads can exceed static loads by orders of magnitude.
Mechanical VibrationsSection 9
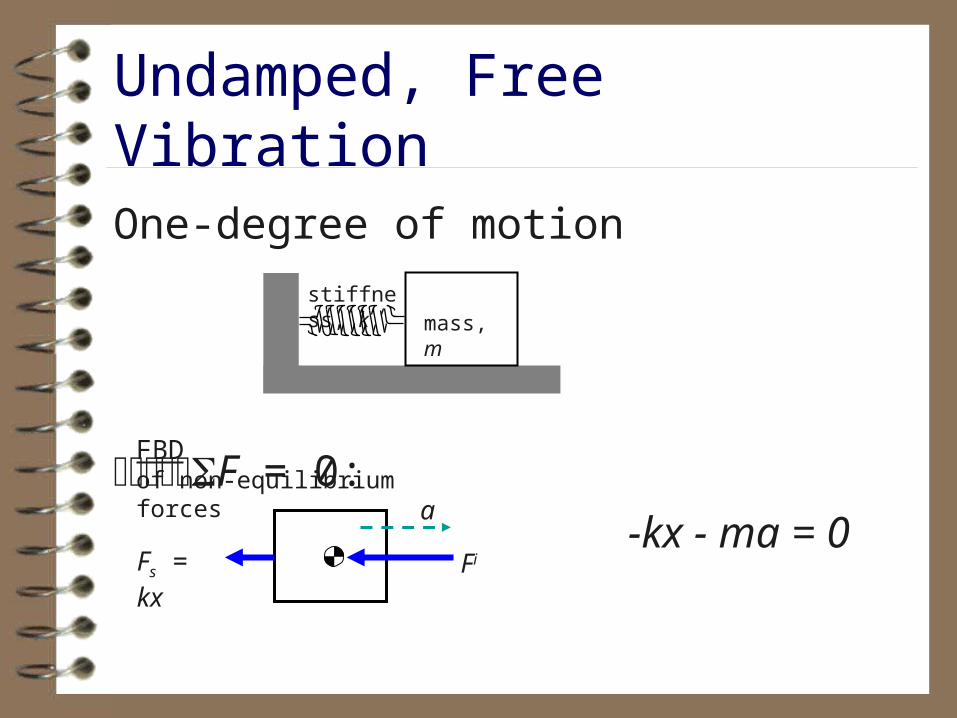
Undamped, Free Vibration
One-degree of motion
F = 0:
-kx - ma = 0
mass, mstiffness, k
FiFs = kx
FBDof non-equilibrium forces
a

Motion Equation
Equilibrium: kx + ma = 0
Rewrite as
Define: (circular frequency)
Then:
02
2
kxdt
xdm
m
kp
022
2
xpdt
xd

Motion Equation
Second order, differential equation has the solution
x = xm sin(pt+)
where:
0
01tanv
px
20
2
0 xp
vxm

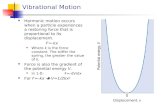
Motion Curve
Period,
Frequency, f
Time
Volts
xm
Displacementx = xm sin(pt+)
p
2
m
kpf
2
1
2
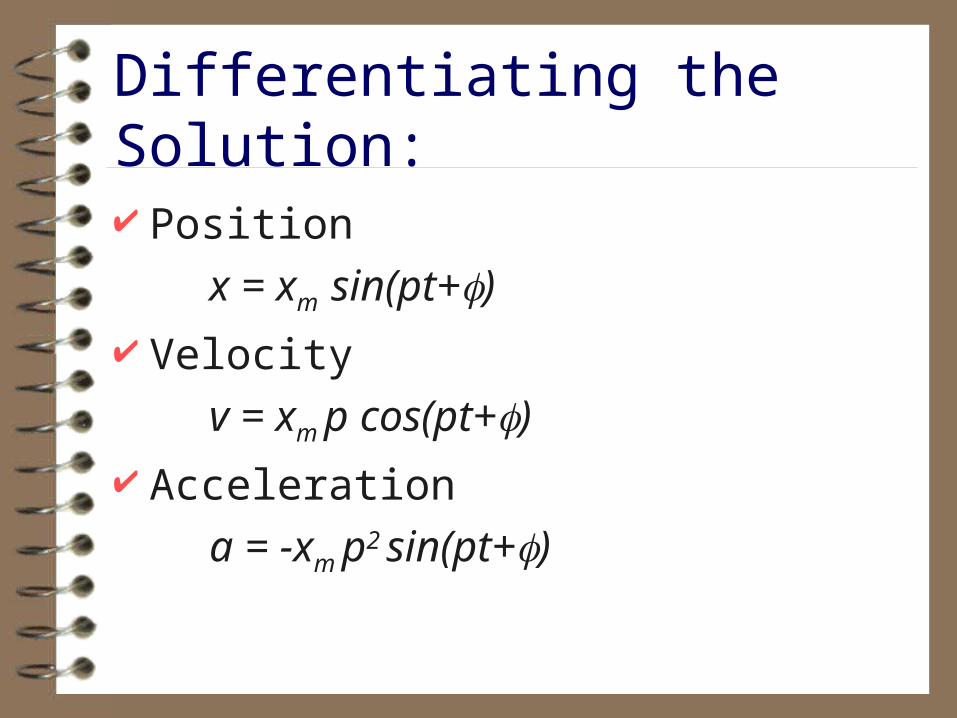
Differentiating the Solution:
Position
x = xm sin(pt+)
Velocity
v = xm p cos(pt+)
Acceleration
a = -xm p2 sin(pt+)

Problem 9-1:
A 100 lb electronics case is supported by the spring suspension as shown. The case is able to move along two linear guides. The spring has a constant of 75 lb/in. The case is displaced 0.5 in then released. Determine the resulting frequency of vibrations. Also determine the maximum velocity and acceleration of the case. Neglect the effects of friction.

Problem 9-10:
The bent link shown has negligible mass and supports a 4 kg collar at its end. Determine the frequency of vibration if the collar is displaced a small amount and released.
250 mm 100 mm
300 N/m
4 kg
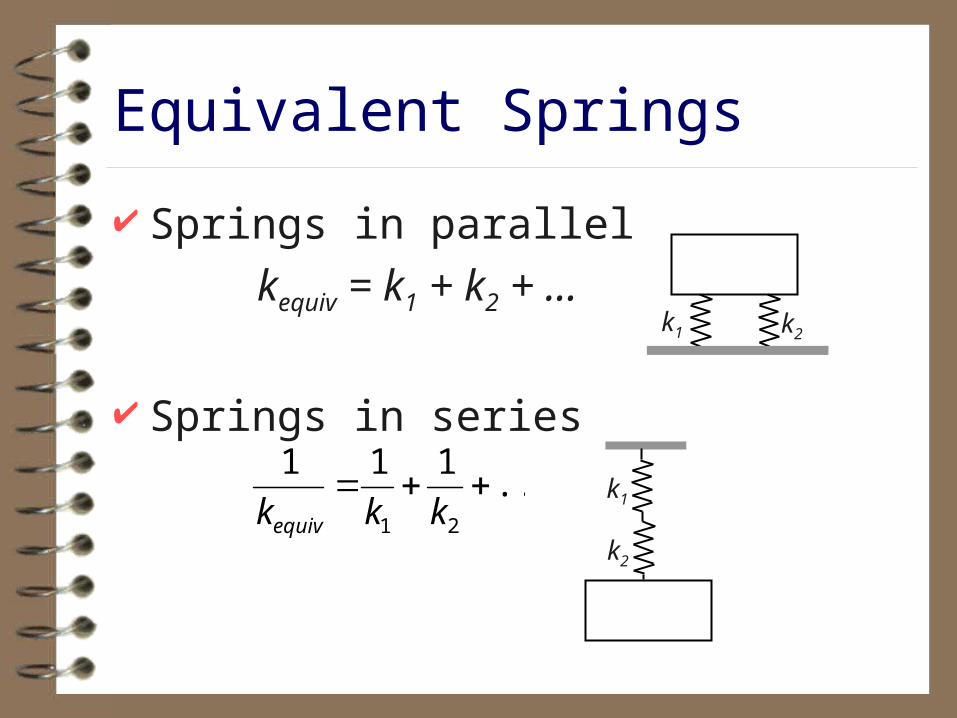
Equivalent Springs
Springs in parallel
kequiv = k1 + k2 + ...
Springs in series
...111
21
kkkequiv
k2
k1
k2k1

Problem 9-3:
A 40 lb machine base is supported by the double spring suspension as shown. The machine base is able to move along two linear guides. Both springs have a constant of 15 lb/in. The machine base is displaced 1.25 in then released. Determine the resulting frequency of vibrations. Also determine the maximum velocity and acceleration of the base. Neglect the effects of friction
machine base
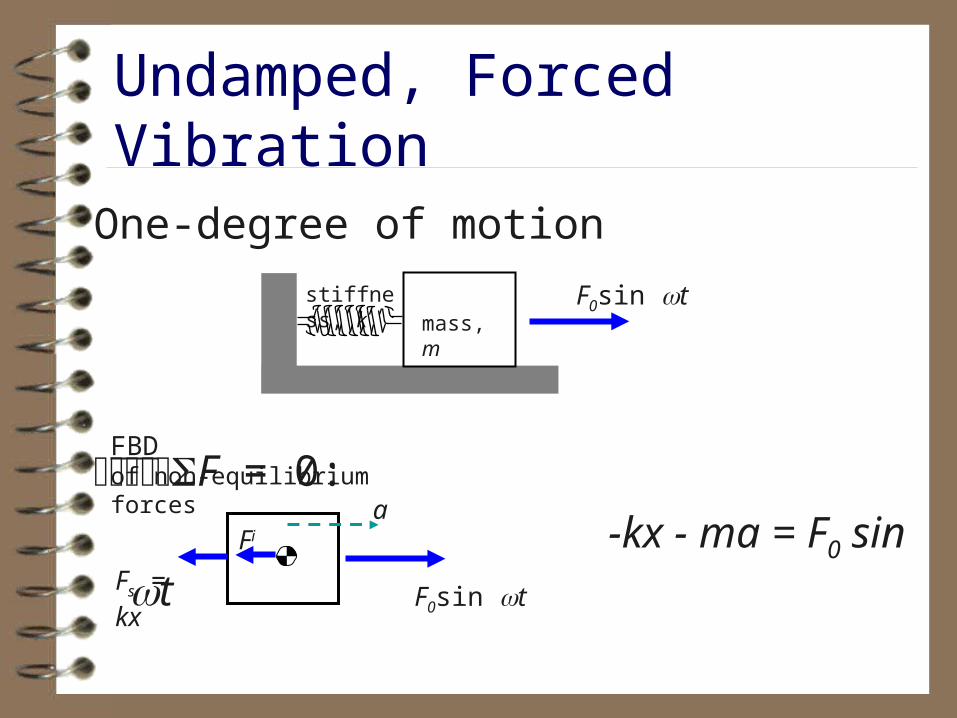
Undamped, Forced Vibration
One-degree of motion
F = 0:
-kx - ma = F0 sin t
mass, mstiffness, k F0sin t
FBDof non-equilibrium forces
Fi
Fs = kx
a
F0sin t

Motion Equation
Equilibrium: kx + ma = F0sin t
Rewrite as
Define: (circular frequency)
Then:
tFkxdt
xdm sin02
2
m
kp
tFxpdt
xd sin02
2
2

Motion Equation
Second order, differential equation has the solution
Free vibration Forced vibration
tp
kFptxx m
sin
)/(1
/sin
20

Motion Curve
In time, the free vibration will dampen out. Forced vibration term is called the steady state
solution.
Free
Forced Full solutionDisplacement
Time

Steady State Solution
The steady state vibration is:
Differentiating the solution:
tp
kFxss
sin
)/(1
/2
0
tp
kFvss
cos)/(1
/2
0
tp
kFass
sin)/(1
/2
02

Problem 9-13
The electric motor has a mass of 50 kg and is supported by four springs, each having a stiffness of 100 N/m. The motor turns a 7 kg disk, which is mounted eccentrically, 20 mm from the disks center. Determine the speed of the motor at which resonance occurs. Assume the motor only vibrates in the vertical direction

Problem 9-14
Determine the amplitude of the steady-state vibration of the motor described in the previous problem, when it is running at 1200 rpm.

Frequency Response Plot

Displacement Excitation
Some machines have a periodic displacement of the support.
Simply replace F0 with k0
mass, mstiffness, k 0sin t
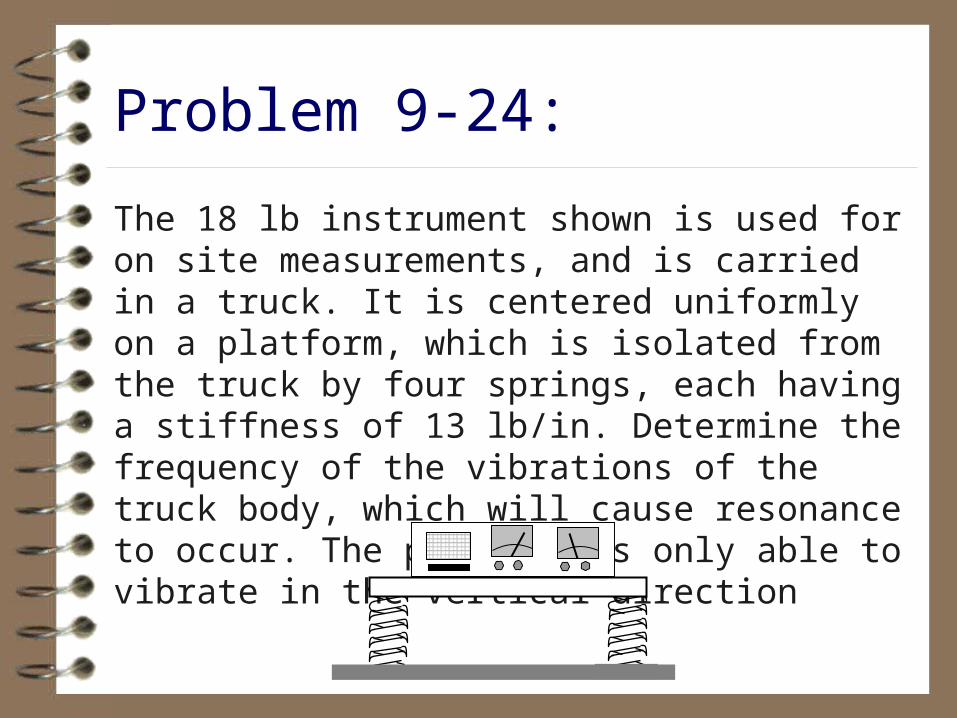
Problem 9-24:
The 18 lb instrument shown is used for on site measurements, and is carried in a truck. It is centered uniformly on a platform, which is isolated from the truck by four springs, each having a stiffness of 13 lb/in. Determine the frequency of the vibrations of the truck body, which will cause resonance to occur. The platform is only able to vibrate in the vertical direction
Problem 9-25:
Determine the amplitude of the steady-state vibration of the instrument described in the previous problem, when the truck floor is vibrating at 7 Hz with an amplitude of 2 in.

Viscous Damping
Many cases, damping is attributed to resistance created by a substance, such as oil, air or water.
This type of viscous force is proportional to the speed of the rigid body.
DampingForce
Relative Velocity
c1

Damped, Forced Vibration
One-degree of motion
F = 0:
-kx - cv - ma = F0 sin t
F0sin tmass, m
stiffness, k
damping, c
FBDof non-equilibrium forces
Fi
Fs = kx
a
F0sin t
Fs = cv
Motion Equation
Equilibrium: kx +cv+ ma = F0sin t
Rewrite as
Define: (circular frequency)
Then:
tFkxdt
dxc
dt
xdm sin02
2
m
kp
tFxpdt
dxp
dt
xd sin02
2
2

Motion Equation
Second order, differential equation has the solution
Free vibration Forced vibration
)'sin()/)(/(2)/(1
/)sin(
222
0)2/(
tpccp
kFtpexx
c
dtmc
m

Damping Ratio
Critical damping ratio
– if c > cc system does not oscillate
Damped natural frequency
mpm
kmcc 22
22
12
cd c
cp
m
c
m
kp

Again, the free vibration will dampen out. Forced vibration term is called the steady state
solution.
Motion Curve
Free
Forced Full solutionDisplacement
Time

Steady State Solution
The steady state vibration is:
Differentiating the solution:
)'sin(
)/)(/(2)/(1
/222
0
tpccp
kFx
c
ss
t
pccp
kFv
c
ss
cos
)/)(/(2)/(1
/222
0
t
pccp
kFa
c
ss
sin
)/)(/(2)/(1
/222
02

Problem 9-28:
The electric motor has a mass of 40 kg and is supported by four springs, each having a stiffness of 200 N/m. The motor turns a 4 kg disk, which is mounted eccentrically, 60 mm from the disks center. Determine the speed of the motor at which resonance occurs. The damping factor c/cc = 0.15. Assume the motor only vibrates in the vertical direction

Problem 9-29:
Determine the amplitude of the steady-state vibration of the motor described in the previous problem, when it is running at 100 rpm.
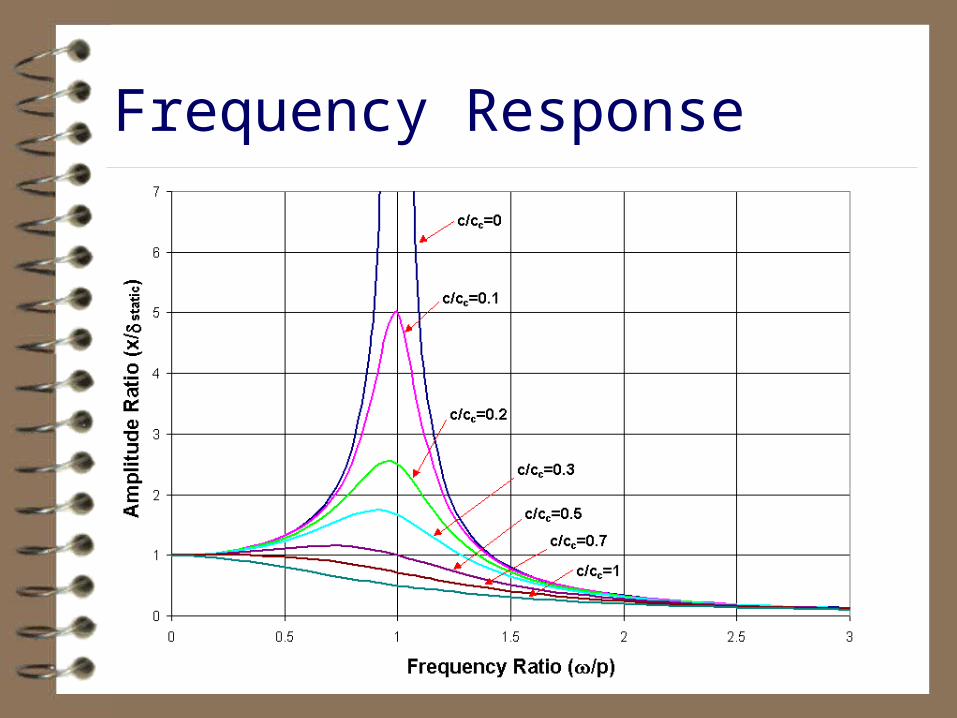
Frequency Response