3D Geometry and Camera Calibration. 3D Coordinate Systems Right-handed vs. left-handedRight-handed...
40
3D Geometry and 3D Geometry and Camera Calibration Camera Calibration
-
date post
19-Dec-2015 -
Category
Documents
-
view
218 -
download
1
Transcript of 3D Geometry and Camera Calibration. 3D Coordinate Systems Right-handed vs. left-handedRight-handed...

3D Geometry and3D Geometry andCamera CalibrationCamera Calibration
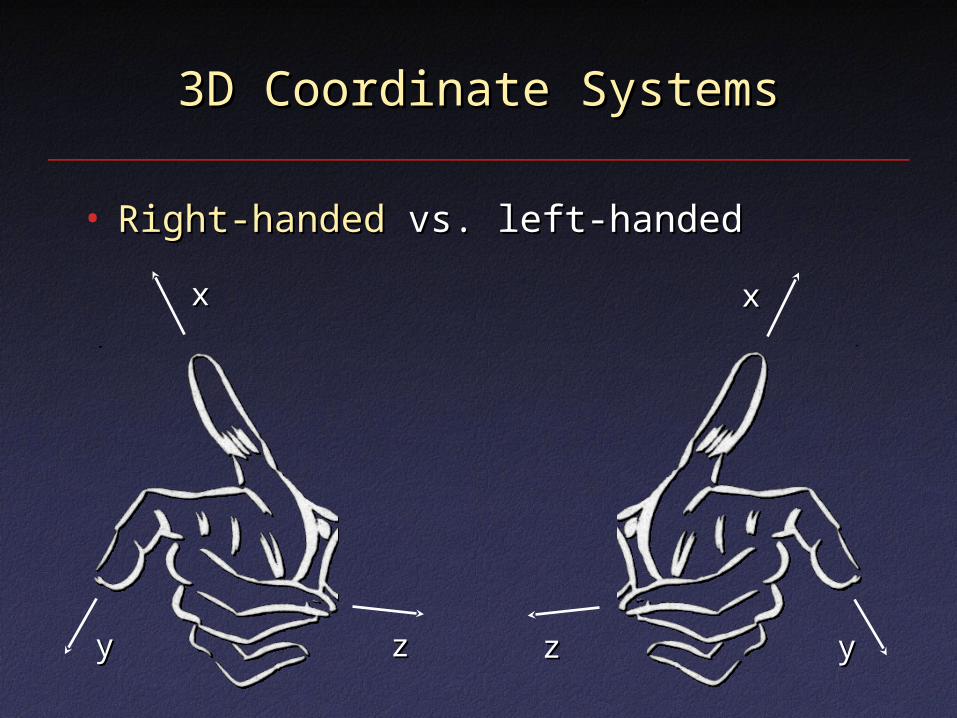
3D Coordinate Systems3D Coordinate Systems
• Right-handedRight-handed vs. left-handed vs. left-handed
xx
yy zz
xx
yyzz

2D Coordinate Systems2D Coordinate Systems
• yy axis up axis up vs. vs. yy axis down axis down
• Origin at center vs. Origin at center vs. cornercorner
• Will often write (Will often write (uu, , vv) for image ) for image coordinatescoordinates
uu
vv
uu
uu
vvvv

3D Geometry Basics3D Geometry Basics
• 3D points = column vectors3D points = column vectors
• Transformations = pre-multiplied Transformations = pre-multiplied matricesmatrices
z
y
x
p
z
y
x
p
z
y
x
ihg
fed
cba
p
T
z
y
x
ihg
fed
cba
p
T

RotationRotation
• Rotation about the Rotation about the zz axis axis
• Rotation about Rotation about xx, , yy axes similar axes similar(cyclically permute (cyclically permute xx, , yy, , zz))
100
0cossin
0sincos
zR
100
0cossin
0sincos
zR

Arbitrary RotationArbitrary Rotation
• Any rotation is a composition of Any rotation is a composition of rotations about rotations about xx, , yy, and , and zz
• Composition of transformations =Composition of transformations =matrix multiplication (watch the order!)matrix multiplication (watch the order!)
• Result: orthonormal matrixResult: orthonormal matrix– Each row, column has unit lengthEach row, column has unit length
– Dot product of rows or columns = 0Dot product of rows or columns = 0
– Inverse of matrix = transposeInverse of matrix = transpose
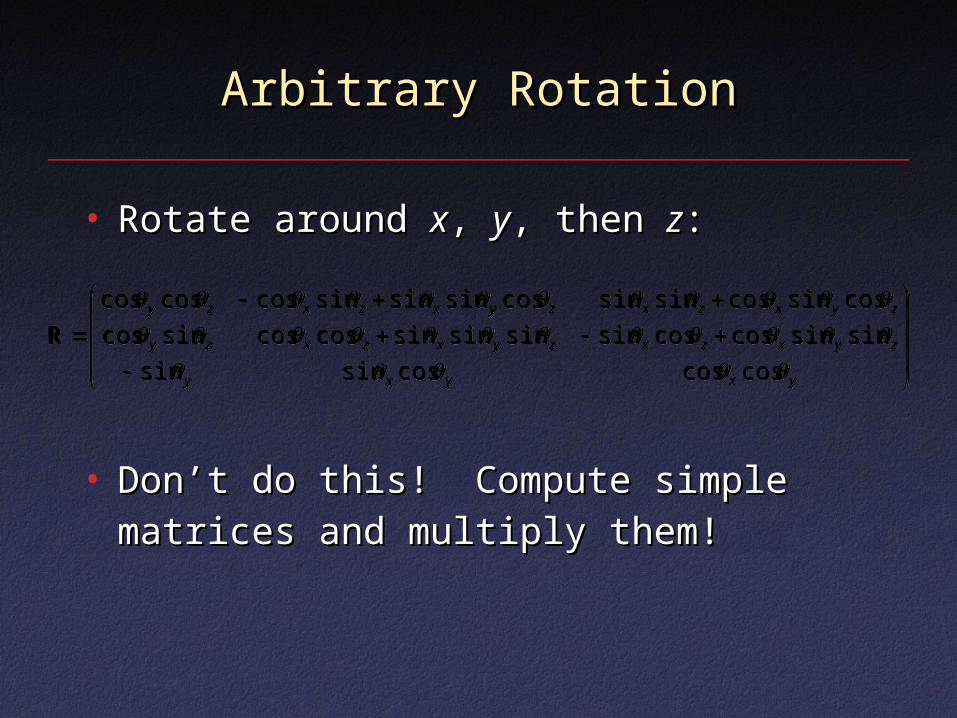
Arbitrary RotationArbitrary Rotation
• Rotate around Rotate around xx, , yy, then , then zz::
• Don’t do this! Compute simple matrices Don’t do this! Compute simple matrices and multiply them!and multiply them!
yxyxy
zyxzxzyxzxzy
zyxzxzyxzxzy
coscoscossinsin
sinsincoscossinsinsinsincoscossincos
cossincossinsincossinsinsincoscoscos
R
yxyxy
zyxzxzyxzxzy
zyxzxzyxzxzy
coscoscossinsin
sinsincoscossinsinsinsincoscossincos
cossincossinsincossinsinsincoscoscos
R
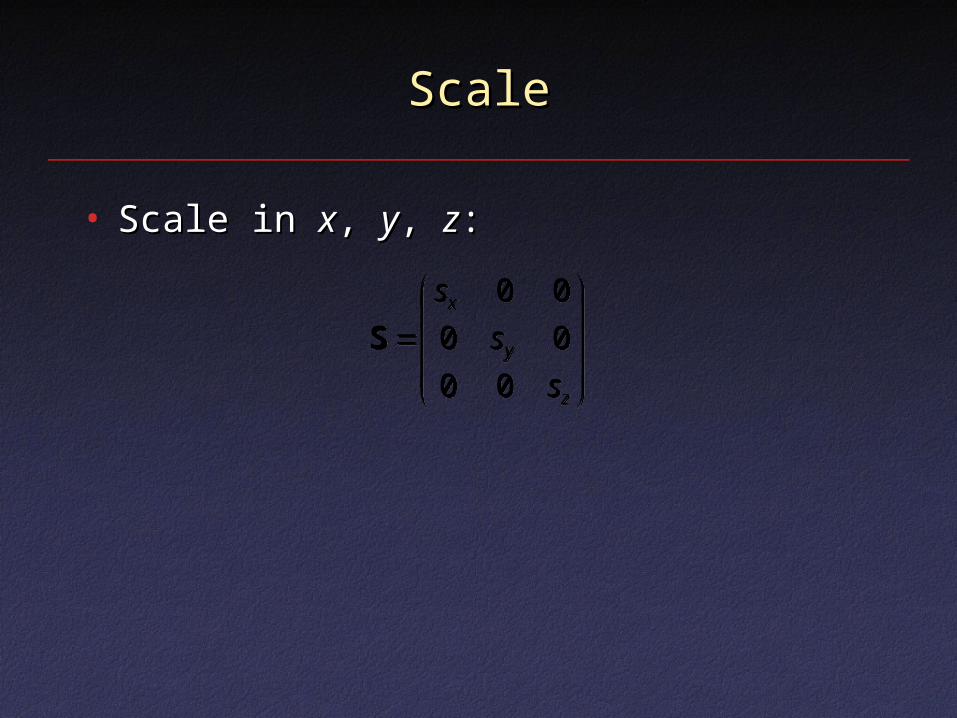
ScaleScale
• Scale in Scale in xx, , yy, , zz::
z
y
x
s
s
s
00
00
00
S
z
y
x
s
s
s
00
00
00
S
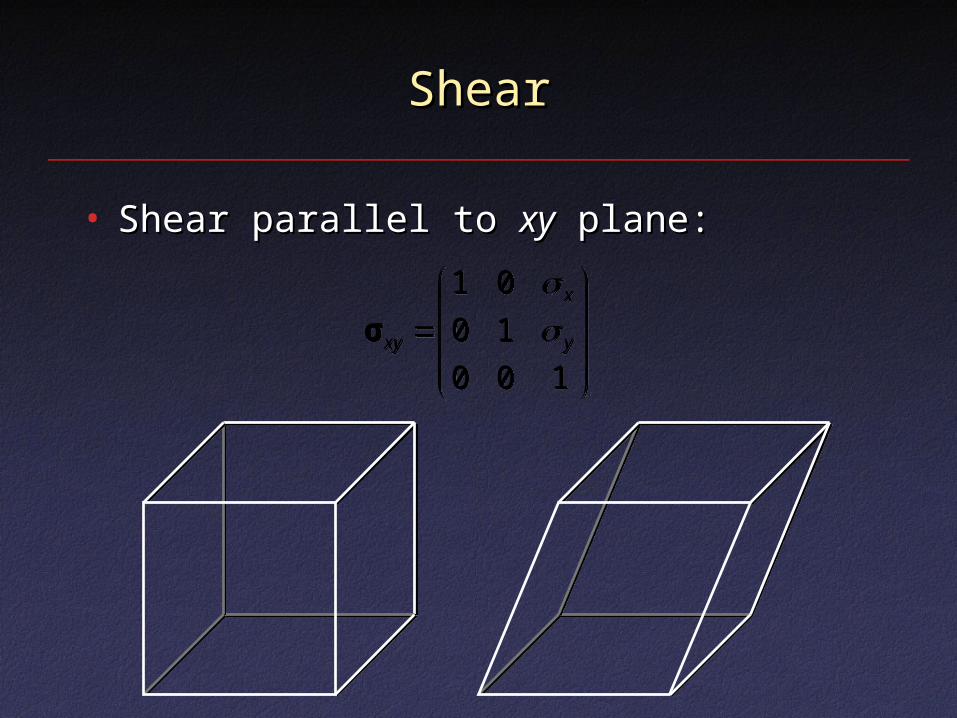
ShearShear
• Shear parallel to Shear parallel to xyxy plane: plane:
100
10
01
y
x
xy
σ
100
10
01
y
x
xy
σ

TranslationTranslation
• Can translation be represented by Can translation be represented by multiplying by a 3multiplying by a 33 matrix?3 matrix?
• No.No.
• Proof:Proof:
00:
AA 00:
AA
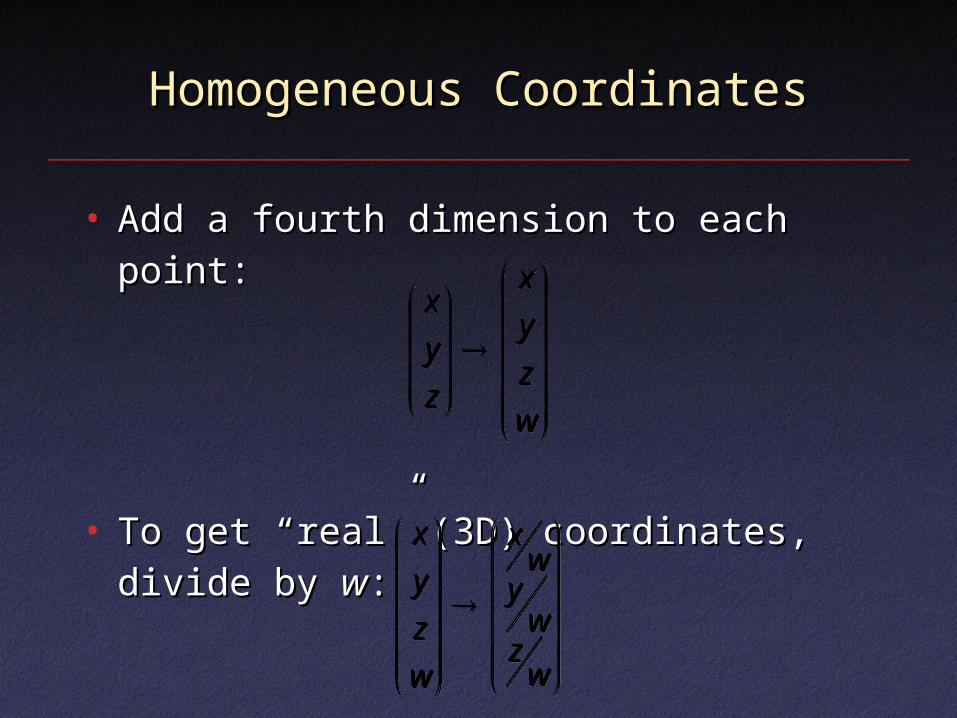
Homogeneous CoordinatesHomogeneous Coordinates
• Add a fourth dimension to each point:Add a fourth dimension to each point:
• To get “real” (3D) coordinates, divide by To get “real” (3D) coordinates, divide by ww::
w
z
y
x
z
y
x
w
z
y
x
z
y
x
wzwywx
w
z
y
x
wzwywx
w
z
y
x

Translation inTranslation inHomogeneous CoordinatesHomogeneous Coordinates
• After divide by After divide by ww, this is just a , this is just a translationtranslationby (by (ttx x , t, ty y , t, tzz))
w
wtz
wty
wtx
w
z
y
x
t
t
t
z
y
x
z
y
x
1000
100
010
001
w
wtz
wty
wtx
w
z
y
x
t
t
t
z
y
x
z
y
x
1000
100
010
001

Perspective ProjectionPerspective Projection
• What does 4What does 4thth row of matrix do? row of matrix do?
• After divide,After divide,
z
z
y
x
w
z
y
x
0100
0100
0010
0001
z
z
y
x
w
z
y
x
0100
0100
0010
0001
1zyzx
z
z
y
x
1zyzx
z
z
y
x
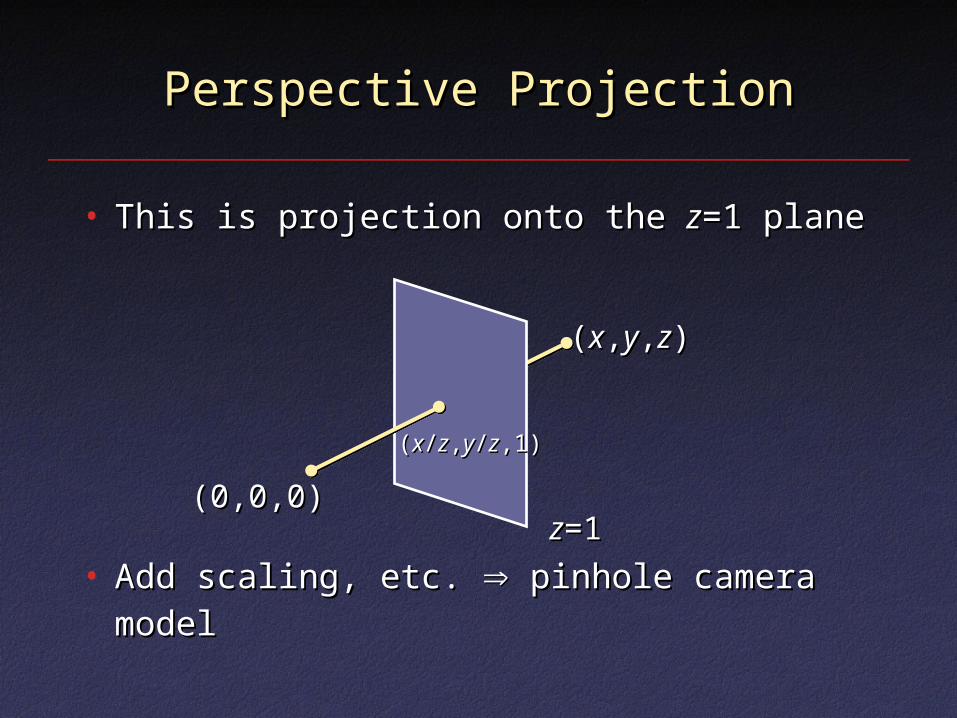
Perspective ProjectionPerspective Projection
• This is projection onto the This is projection onto the zz=1 plane=1 plane
• Add scaling, etc. Add scaling, etc. pinhole camera model pinhole camera model
((xx,,yy,,zz))
((xx//zz,,yy//zz,1),1)
(0,0,0)(0,0,0)zz=1=1

Putting It All Together:Putting It All Together:A Camera ModelA Camera Model
xcamcamcampiximg
TRPST xcamcamcampiximg
TRPST
3D point3D point(homogeneous coords)(homogeneous coords)
CameraCameralocationlocation
CameraCameraorientationorientation
PerspectivePerspectiveprojectionprojection
Scale toScale topixel sizepixel size
TranslateTranslateto imageto imagecentercenter
Then performThen performhomogeneoushomogeneous
divide, anddivide, andget (u,v) coordsget (u,v) coords

Putting It All Together:Putting It All Together:A Camera ModelA Camera Model
xcamcamcampiximg
TRPST xcamcamcampiximg
TRPST
ExtrinsicsExtrinsicsIntrinsicsIntrinsics
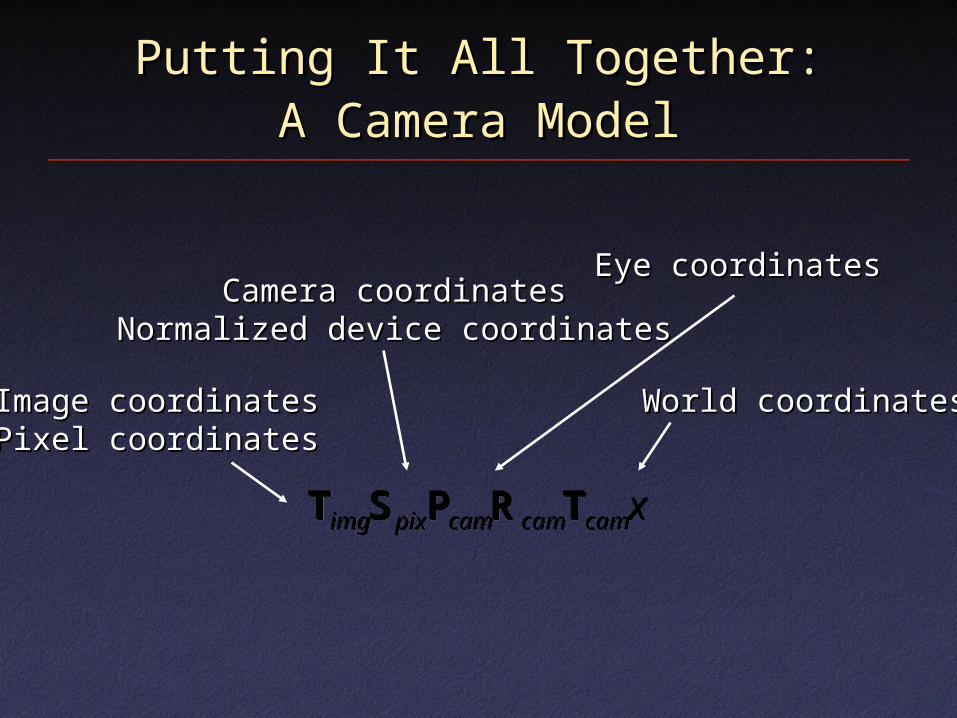
Putting It All Together:Putting It All Together:A Camera ModelA Camera Model
xcamcamcampiximg
TRPST xcamcamcampiximg
TRPST
World coordinatesWorld coordinates
Camera coordinatesCamera coordinatesNormalized device coordinatesNormalized device coordinates
Eye coordinatesEye coordinates
Image coordinatesImage coordinatesPixel coordinatesPixel coordinates

More General Camera ModelMore General Camera Model
• Multiply all these matrices togetherMultiply all these matrices together
• Don’t care about “Don’t care about “zz” after transformation” after transformation
• Scale ambiguity Scale ambiguity 11 free parameters 11 free parameters
lkzjyix
hgzfyexlkzjyix
dczbyax
z
y
x
lkji
hgfe
dcbashomogeneou
divide
1
lkzjyix
hgzfyexlkzjyix
dczbyax
z
y
x
lkji
hgfe
dcbashomogeneou
divide
1
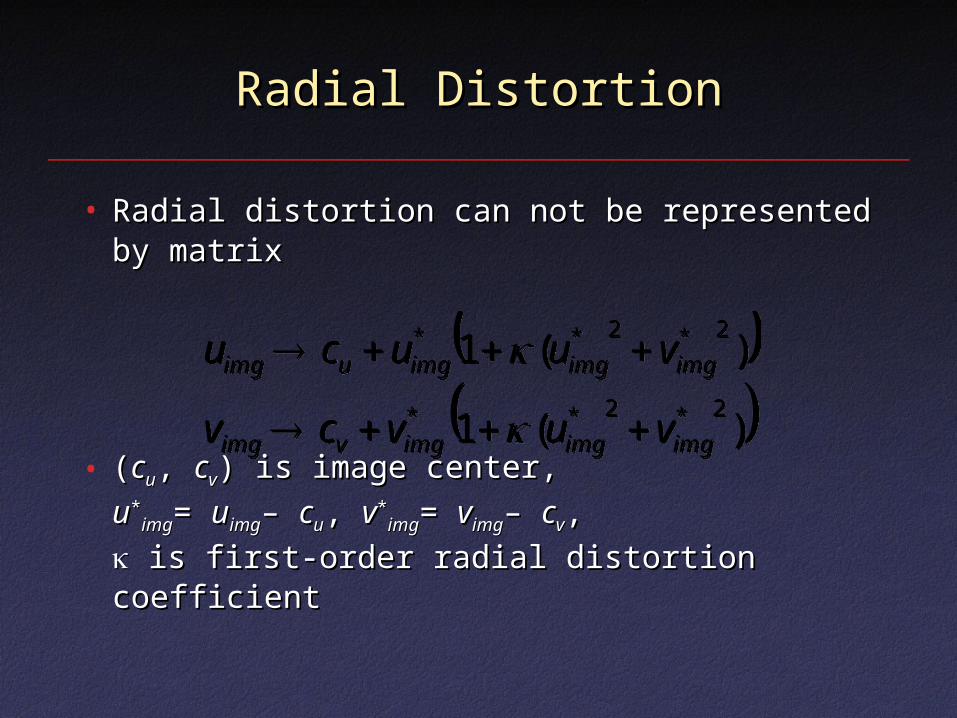
Radial DistortionRadial Distortion
• Radial distortion can not be representedRadial distortion can not be representedby matrixby matrix
• ((ccuu, , ccvv) is image center,) is image center,
uu**imgimg= = uuimgimg– – ccuu, , vv**
imgimg= = vvimgimg– – ccvv,,
is first-order radial distortion coefficient is first-order radial distortion coefficient
)(1
)(12*2**
2*2**
imgimgimgvimg
imgimgimguimg
vuvcv
vuucu
)(1
)(12*2**
2*2**
imgimgimgvimg
imgimgimguimg
vuvcv
vuucu

Camera CalibrationCamera Calibration
• Determining values for camera Determining values for camera parametersparameters
• Necessary for any algorithm that requiresNecessary for any algorithm that requires3D 3D 2D mapping 2D mapping
• Method used depends on:Method used depends on:– What data is availableWhat data is available
– Intrinsics only vs. extrinsics only vs. bothIntrinsics only vs. extrinsics only vs. both
– Form of camera modelForm of camera model
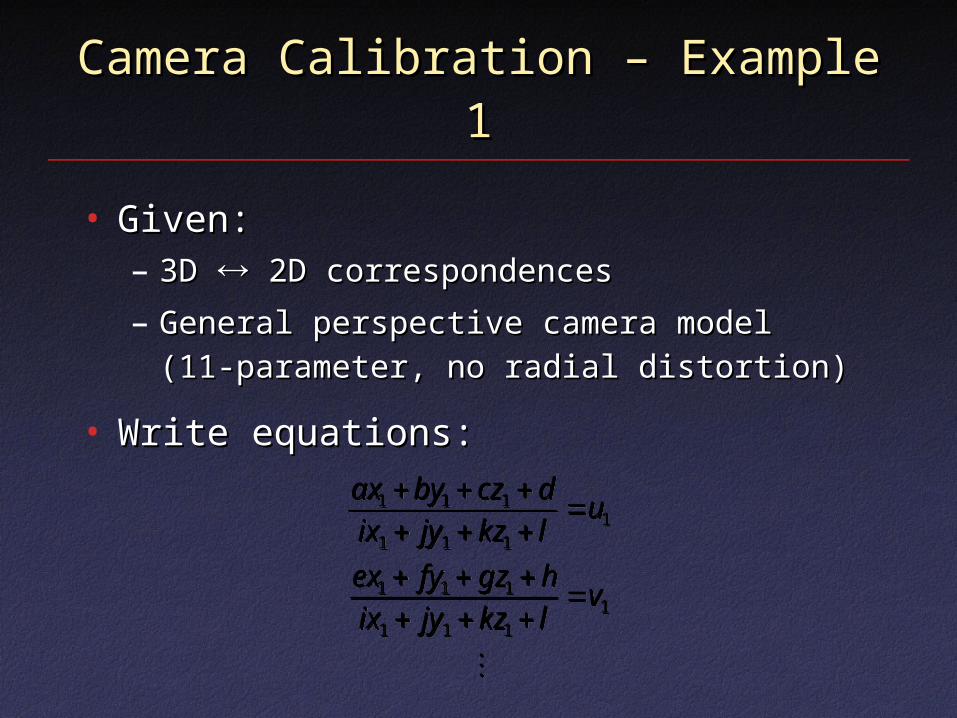
Camera Calibration – Example 1Camera Calibration – Example 1
• Given:Given:– 3D 3D 2D correspondences 2D correspondences
– General perspective camera modelGeneral perspective camera model(11-parameter, no radial distortion)(11-parameter, no radial distortion)
• Write equations:Write equations:
1111
111
1111
111
vlkzjyix
hgzfyex
ulkzjyix
dczbyax
1111
111
1111
111
vlkzjyix
hgzfyex
ulkzjyix
dczbyax

Camera Calibration – Example 1Camera Calibration – Example 1
• Linear equationLinear equation
• Overconstrained (more equations than unknowns)Overconstrained (more equations than unknowns)
• Underconstrained (rank deficient matrix – any Underconstrained (rank deficient matrix – any multiple of a solution, including 0, ismultiple of a solution, including 0, isalso a solution)also a solution)
0
l
c
b
a
uzuyuxuzyx
uzuyuxuzyx
uzuyuxuzyx
uzuyuxuzyx
2222222222
2222222222
1111111111
1111111111
10000
00001
10000
00001
0
l
c
b
a
uzuyuxuzyx
uzuyuxuzyx
uzuyuxuzyx
uzuyuxuzyx
2222222222
2222222222
1111111111
1111111111
10000
00001
10000
00001

Camera Calibration – Example 1Camera Calibration – Example 1
• Standard linear least squares methods Standard linear least squares methods forforAx=0 will give the solution x=0Ax=0 will give the solution x=0
• Instead, look for a solution with |x|= 1Instead, look for a solution with |x|= 1
• That is, minimize |Ax|That is, minimize |Ax|22 subject to |x| subject to |x|22=1=1
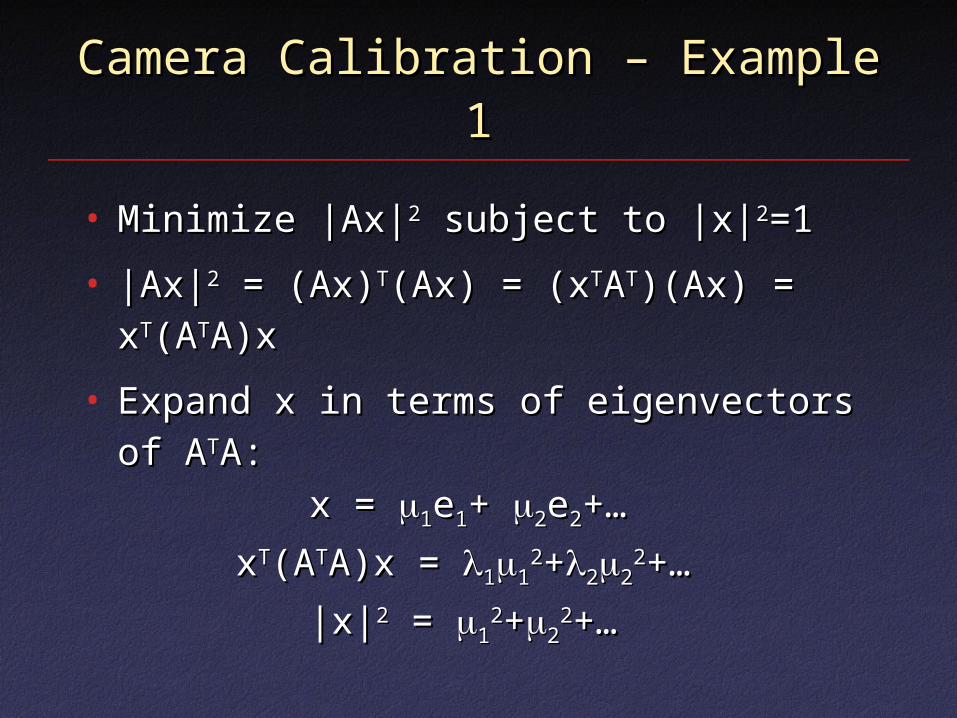
Camera Calibration – Example 1Camera Calibration – Example 1
• Minimize |Ax|Minimize |Ax|22 subject to |x| subject to |x|22=1=1
• |Ax||Ax|22 = (Ax) = (Ax)TT(Ax) = (x(Ax) = (xTTAATT)(Ax) = x)(Ax) = xTT(A(ATTA)xA)x
• Expand x in terms of eigenvectors of Expand x in terms of eigenvectors of AATTA:A:
x = x = 11ee11+ + 22ee22+…+…
x xTT(A(ATTA)x = A)x = 111122++2222
22+…+…
|x||x|22 = = 1122++22
22+…+…

Camera Calibration – Example 1Camera Calibration – Example 1
• To minimizeTo minimize1111
22++222222+…+…
subject tosubject to 11
22++2222+… = 1+… = 1
set set minmin= 1 and all other = 1 and all other ii=0=0
• Thus, least squares solution is minimum Thus, least squares solution is minimum (non-zero) eigenvalue of A(non-zero) eigenvalue of ATTAA
Camera Calibration – Example 2Camera Calibration – Example 2
• Incorporating additional constraints into Incorporating additional constraints into camera modelcamera model– No shear, no scale (rigid-body motion)No shear, no scale (rigid-body motion)
– Square pixelsSquare pixels
– etc.etc.
• These impose nonlinear constraints on These impose nonlinear constraints on camera parameterscamera parameters

Camera Calibration – Example 2Camera Calibration – Example 2
• Option 1: solve for general perspective Option 1: solve for general perspective model, then find closest solution thatmodel, then find closest solution thatsatisfies constraintssatisfies constraints
• Option 2: nonlinear least squaresOption 2: nonlinear least squares– Usually “gradient descent” techniquesUsually “gradient descent” techniques
– Common implementations availableCommon implementations available(e.g. Matlab optimization toolbox)(e.g. Matlab optimization toolbox)

Camera Calibration – Example 3Camera Calibration – Example 3
• Incorporating radial distortionIncorporating radial distortion
• Option 1:Option 1:– Find distortion first (straight lines inFind distortion first (straight lines in
calibration target)calibration target)
– Warp image to eliminate distortionWarp image to eliminate distortion
– Run (simpler) perspective calibrationRun (simpler) perspective calibration
• Option 2: nonlinear least squaresOption 2: nonlinear least squares
Camera Calibration – Example 4Camera Calibration – Example 4
• What if 3D points are not known?What if 3D points are not known?
• Structure from motion problem!Structure from motion problem!
• As we saw last time, can often be As we saw last time, can often be solved since # of knowns > # of solved since # of knowns > # of unknownsunknowns

Multi-Camera GeometryMulti-Camera Geometry
• Epipolar geometry – relationship Epipolar geometry – relationship between observed positions of points in between observed positions of points in multiple camerasmultiple cameras
• Assume:Assume:– 2 cameras2 cameras
– Known intrinsics and extrinsicsKnown intrinsics and extrinsics
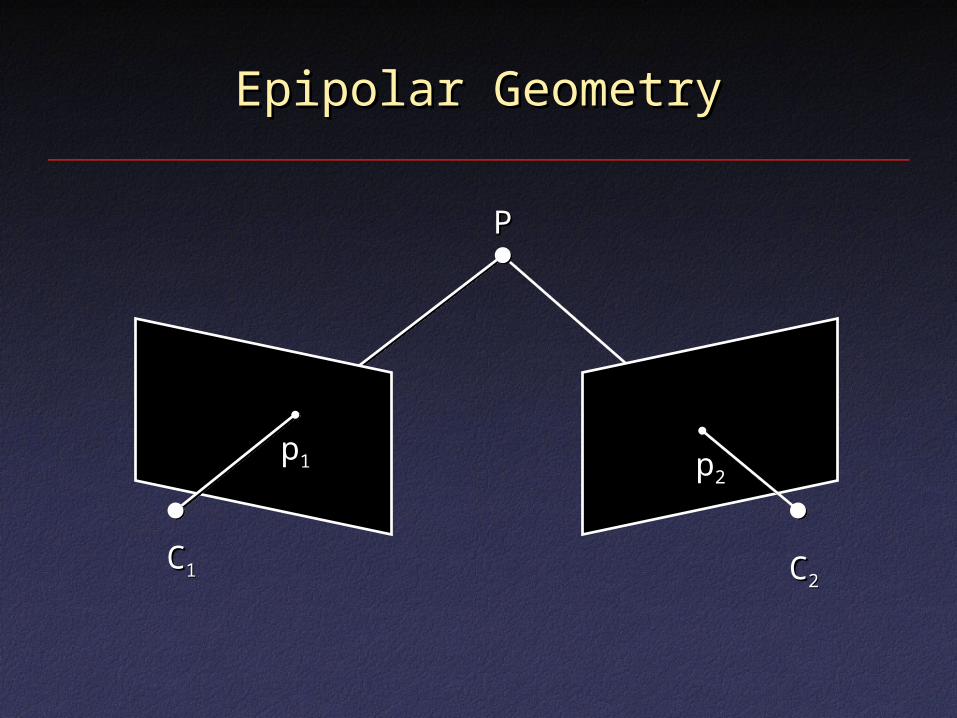
Epipolar GeometryEpipolar Geometry
PP
CC11 CC22
pp22pp11
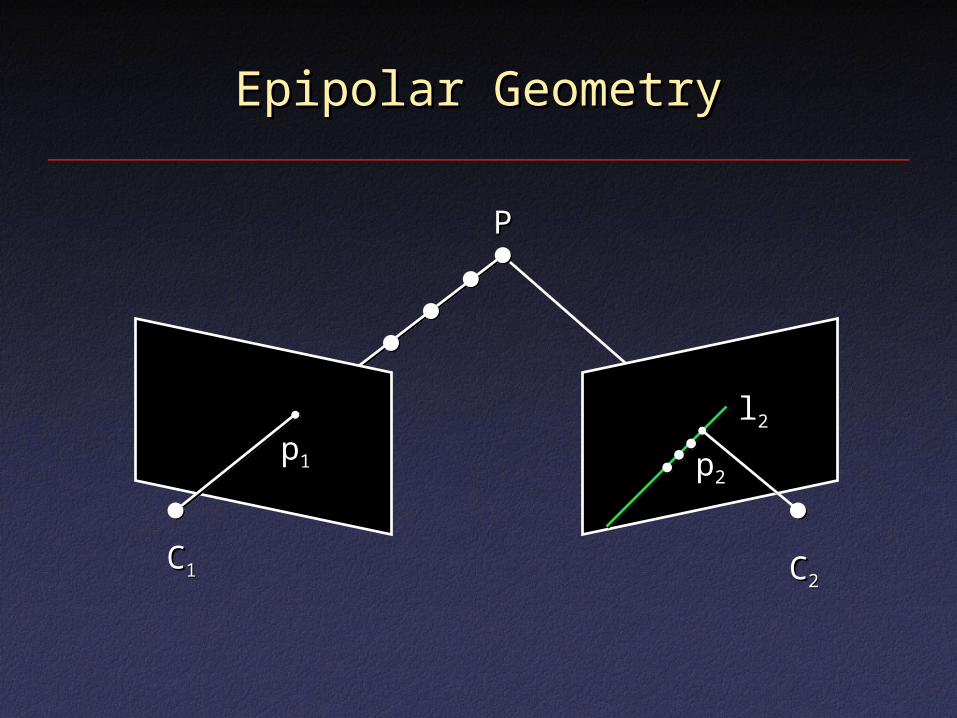
Epipolar GeometryEpipolar Geometry
PP
CC11 CC22
pp22pp11
ll22
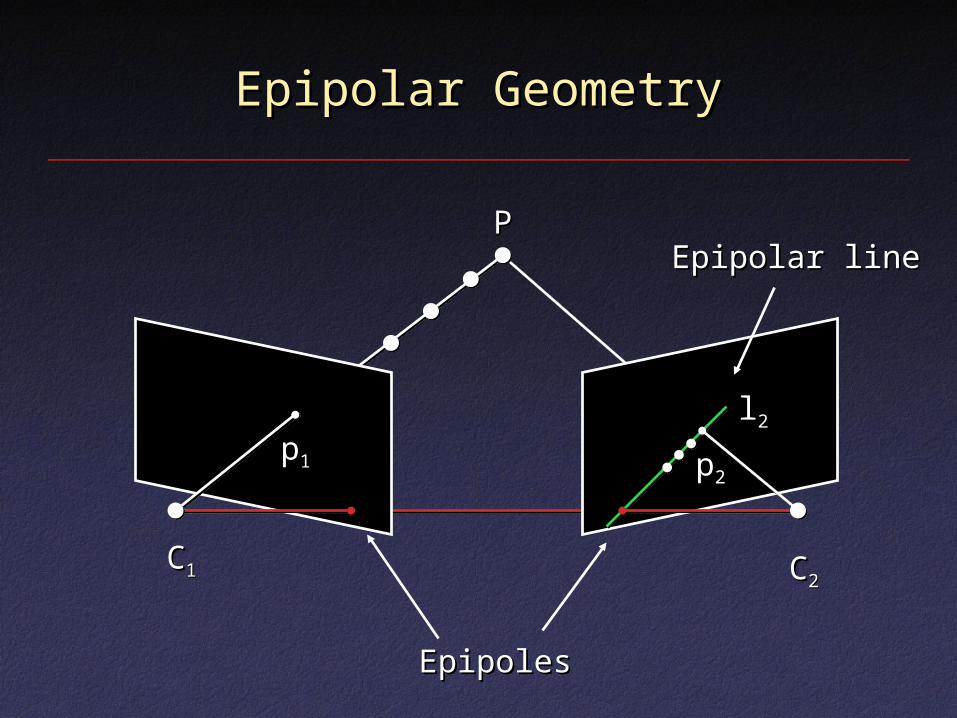
Epipolar GeometryEpipolar Geometry
PP
CC11 CC22
pp22pp11
ll22
Epipolar lineEpipolar line
EpipolesEpipoles

Epipolar GeometryEpipolar Geometry
• Goal: derive equation for lGoal: derive equation for l22
• Observation: P, CObservation: P, C11, C, C22 determine a plane determine a plane
PP
CC11 CC22
pp22pp11
ll22
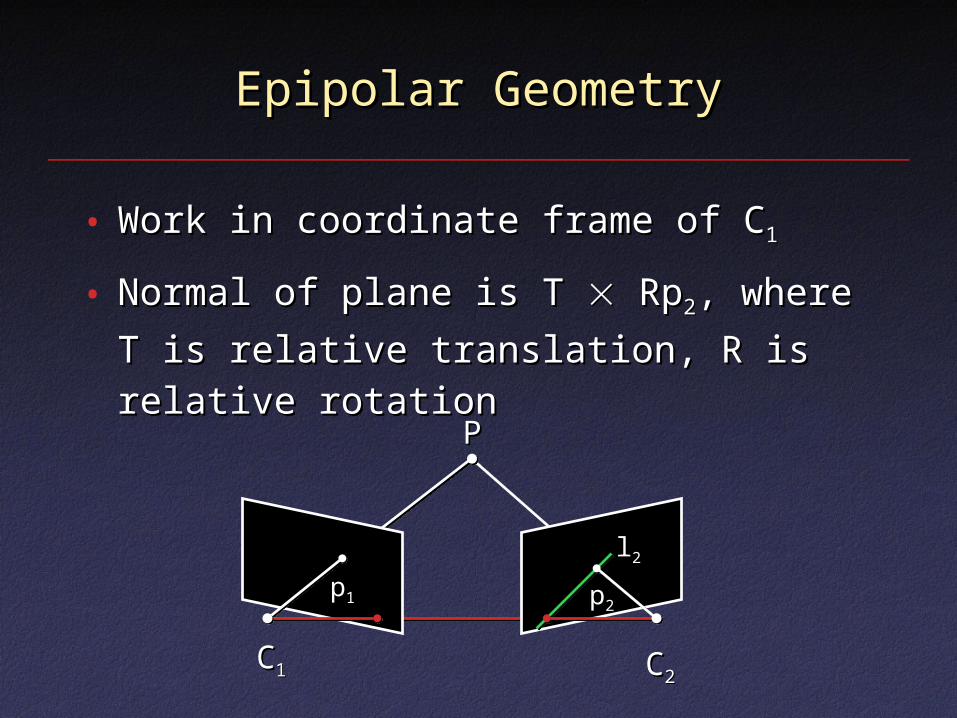
Epipolar GeometryEpipolar Geometry
• Work in coordinate frame of CWork in coordinate frame of C11
• Normal of plane is T Normal of plane is T Rp Rp22, where T is , where T is
relative translation, R is relative rotationrelative translation, R is relative rotation
PP
CC11 CC22
pp22pp11
ll22
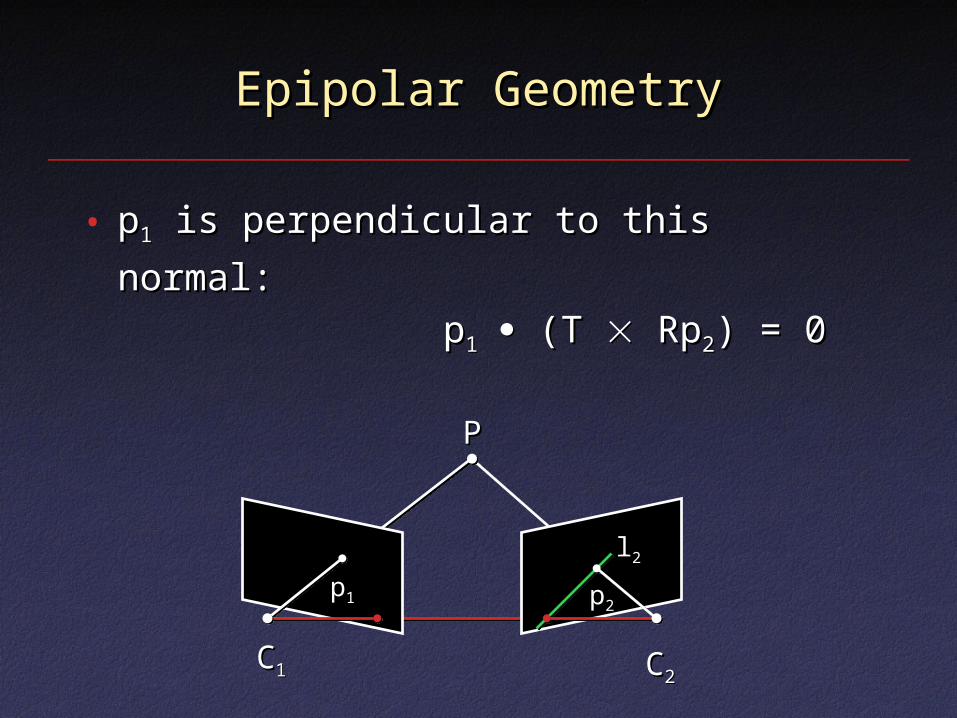
Epipolar GeometryEpipolar Geometry
• pp11 is perpendicular to this normal: is perpendicular to this normal:
p p11 (T (T Rp Rp22) = 0) = 0
PP
CC11 CC22
pp22pp11
ll22
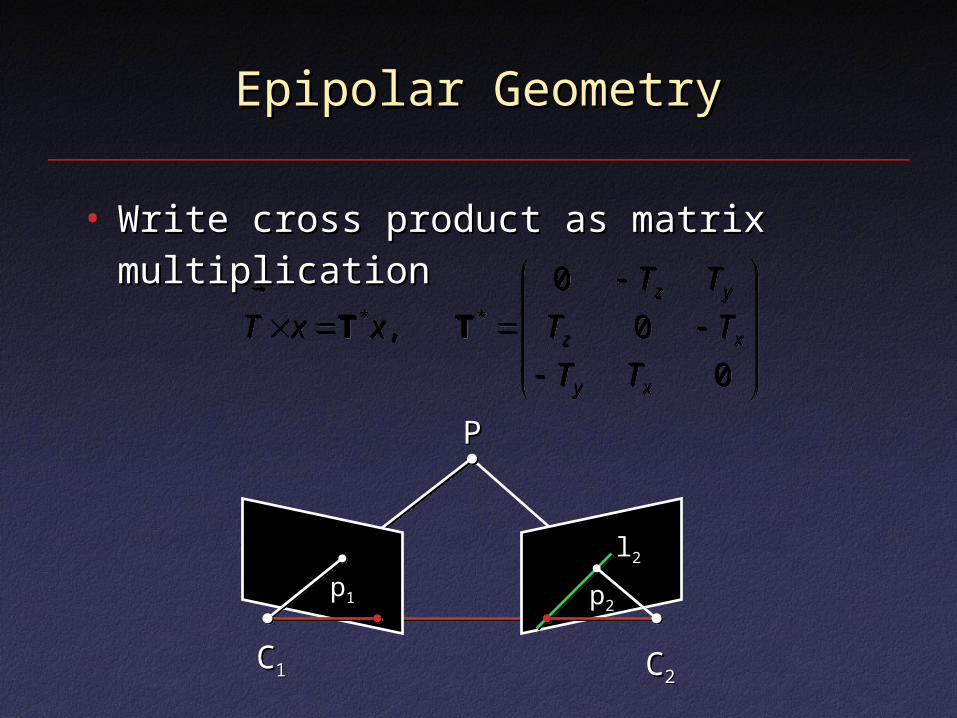
Epipolar GeometryEpipolar Geometry
• Write cross product as matrix Write cross product as matrix multiplicationmultiplication
PP
CC11 CC22
pp22pp11
ll22
0
0
0
, **
xy
xz
yz
TT
TT
TT
xxT TT
0
0
0
, **
xy
xz
yz
TT
TT
TT
xxT TT
Epipolar GeometryEpipolar Geometry
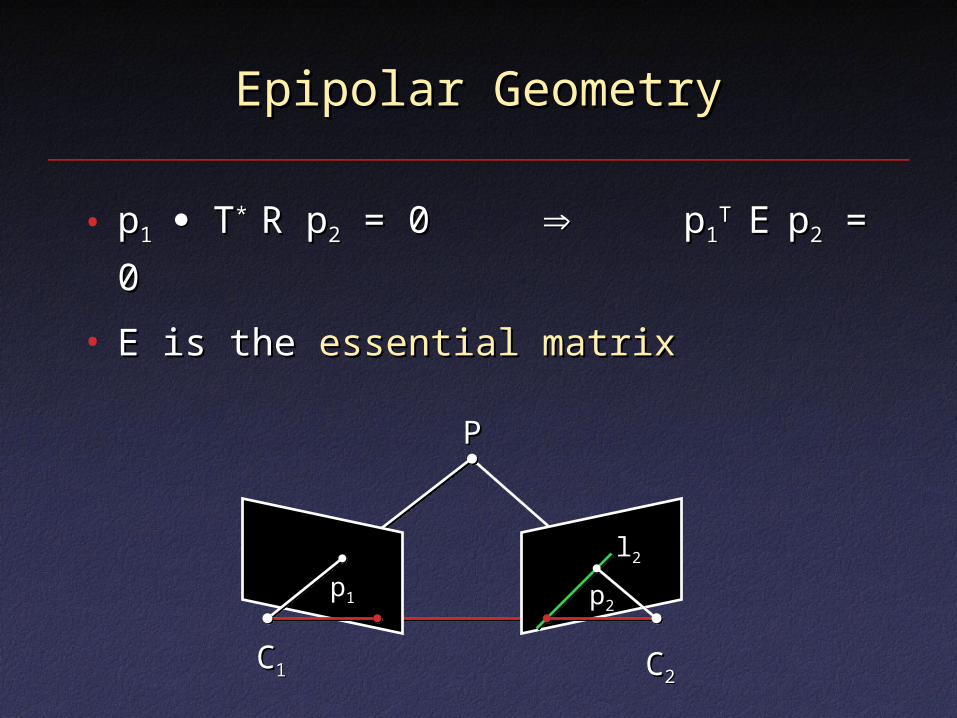
• pp11 T T* * R pR p22 = 0 = 0 p p11TT EE pp22 = 0 = 0
• E is the E is the essential matrixessential matrix
PP
CC11 CC22
pp22pp11
ll22

Essential MatrixEssential Matrix
• E depends only on camera geometryE depends only on camera geometry
• Given E, can derive equation for line lGiven E, can derive equation for line l22
PP
CC11 CC22
pp22pp11
ll22
Fundamental MatrixFundamental Matrix
• Can define Can define fundamental matrixfundamental matrix F F analogously, operating on pixel analogously, operating on pixel coordinates instead of camera coordinates instead of camera coordinatescoordinates
uu11TT FF uu22 = 0 = 0
• Advantage: can sometimes estimate F Advantage: can sometimes estimate F without knowing camera calibrationwithout knowing camera calibration