2IV60 Computer Graphics Basic Math for CG Jack van Wijk TU/e.
63
2IV60 Computer Graphics Basic Math for CG Jack van Wijk TU/e
-
Upload
rosaline-harrington -
Category
Documents
-
view
223 -
download
0
Transcript of 2IV60 Computer Graphics Basic Math for CG Jack van Wijk TU/e.
2IV60 Computer GraphicsBasic Math for CG
Jack van Wijk
TU/e
Overview
• Coordinates, points, vectors
• Matrices
H&B A-1
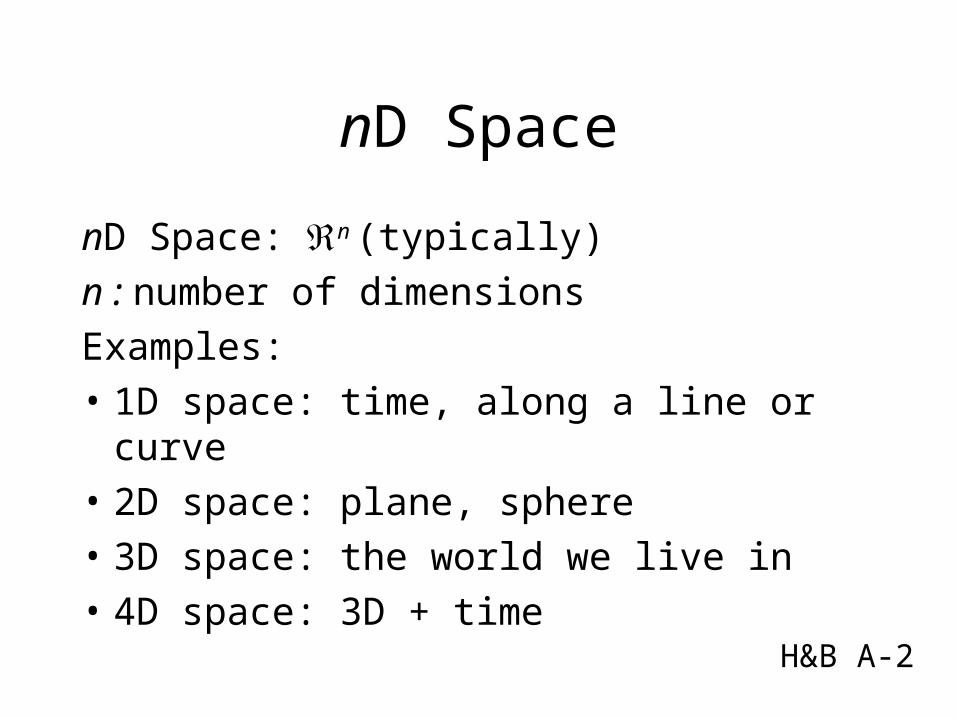
nD Space
nD Space: n (typically)
n : number of dimensions
Examples:
• 1D space: time, along a line or curve
• 2D space: plane, sphere
• 3D space: the world we live in
• 4D space: 3D + timeH&B A-2
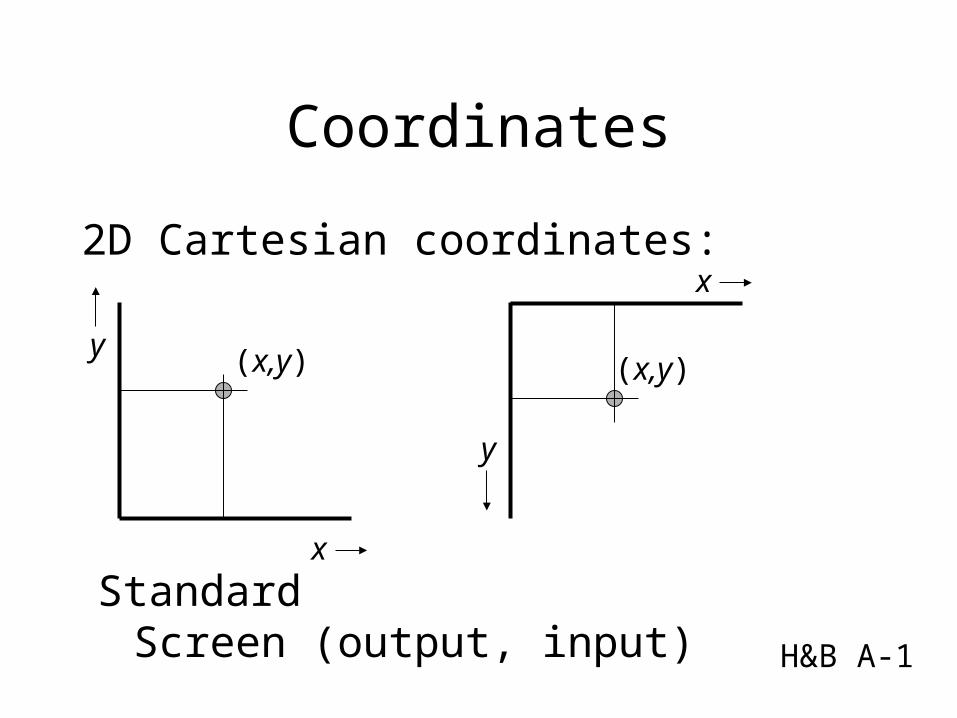
Coordinates
2D Cartesian coordinates:
x
y (x,y) (x,y)
y
x
Standard Screen (output, input)
H&B A-1
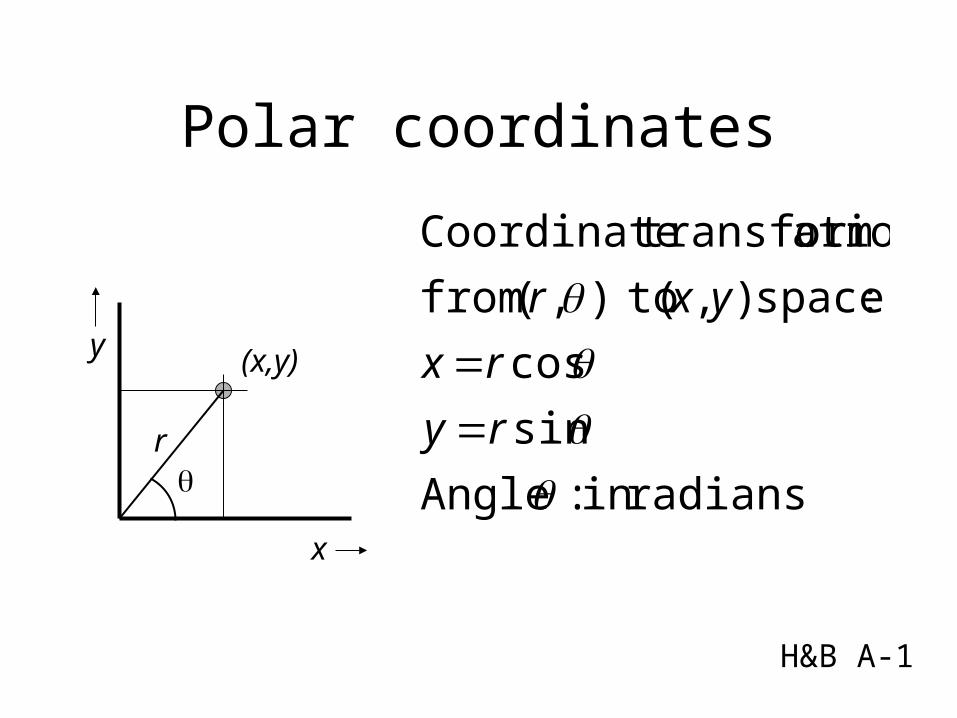
Polar coordinates
x
y (x,y)
H&B A-1
r radiansin : Angle
sin
cos
:space ),( to),( from
ation transformCoordinate
ry
rx
yxr
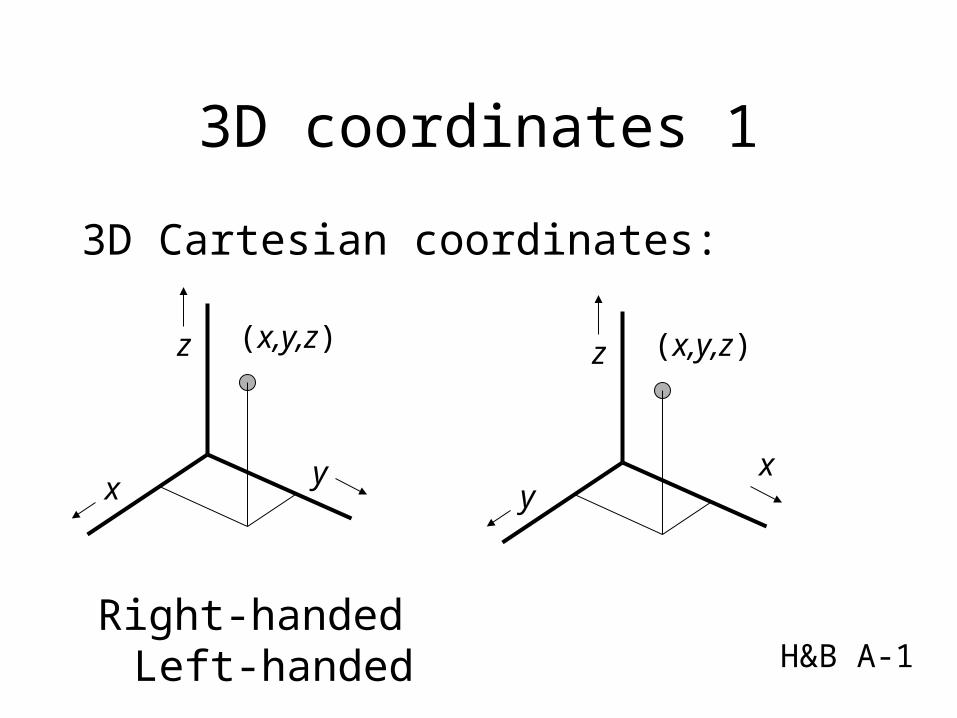
3D coordinates 1
3D Cartesian coordinates:
x y
(x,y,z)
Right-handed Left-handedH&B A-1
z
xy
(x,y,z)z
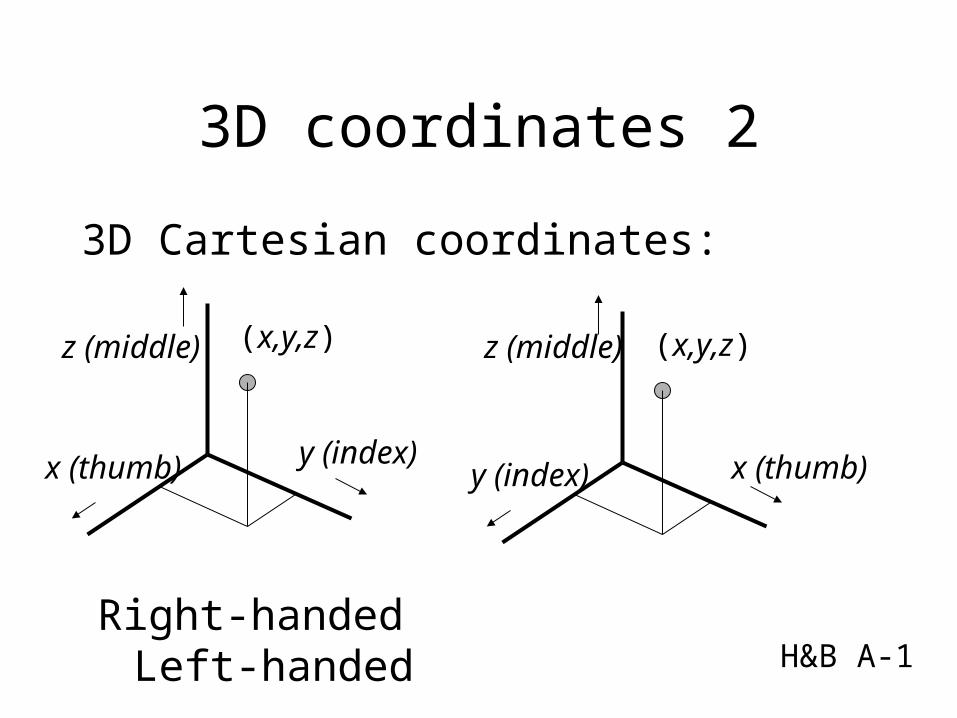
3D coordinates 2
3D Cartesian coordinates:
x (thumb) y (index)
(x,y,z)
Right-handed Left-handedH&B A-1
z (middle) (x,y,z)z (middle)
x (thumb)y (index)
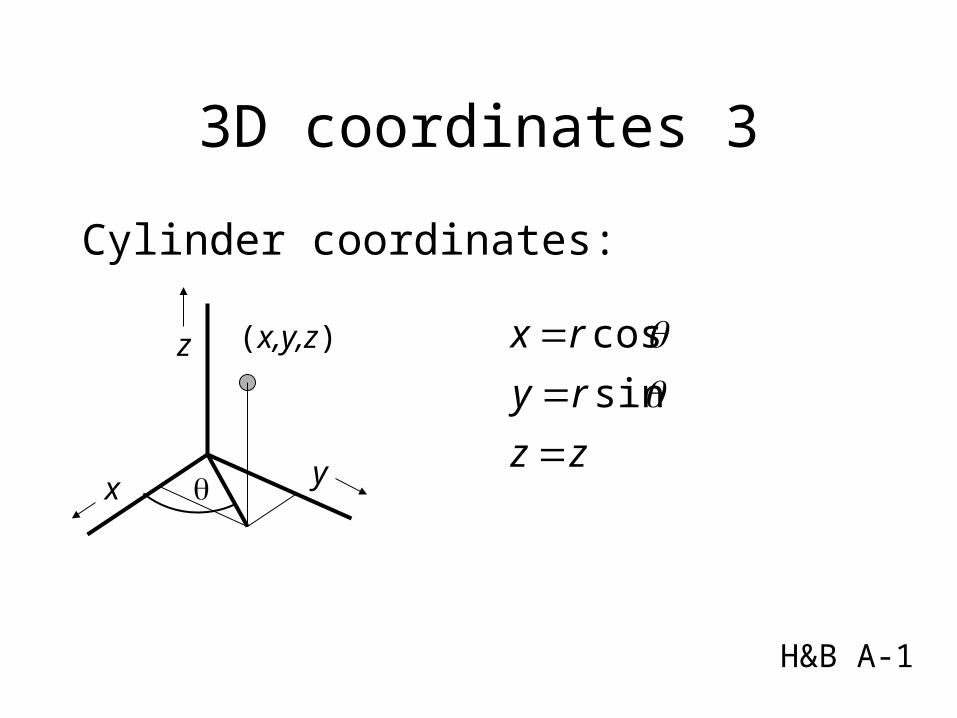
3D coordinates 3
Cylinder coordinates:
x y
(x,y,z)
H&B A-1
z
zz
ry
rx
sin
cos
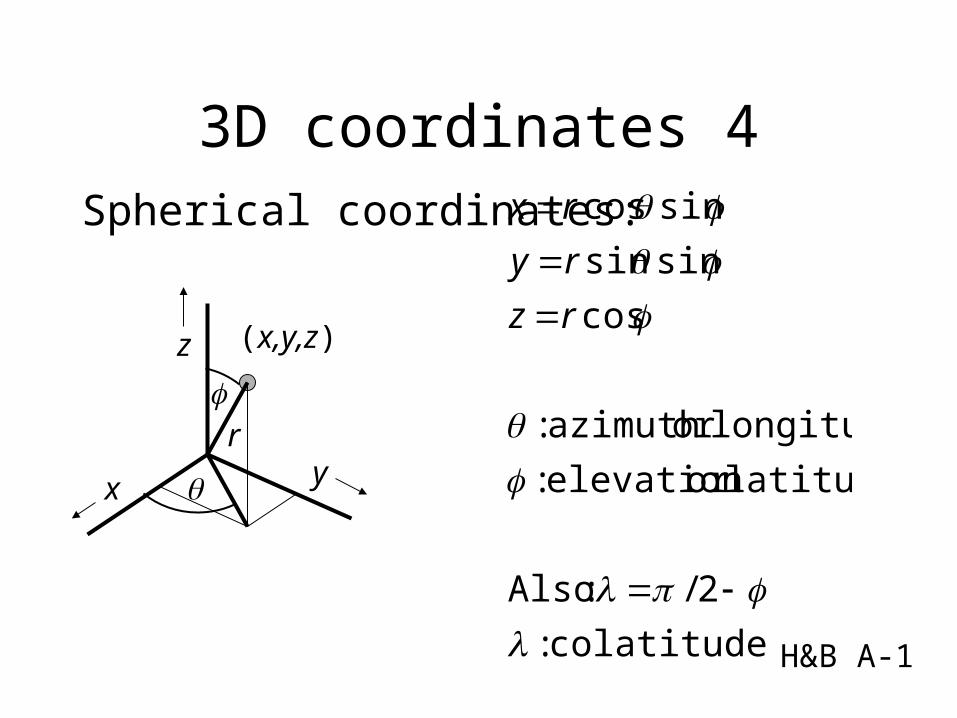
3D coordinates 4Spherical coordinates:
x y
(x,y,z)
H&B A-1
z
colatitude :
2/ :Also
latitudeor elevation :
longitudeor azimuth :
cos
sinsin
sincos
rz
ry
rx
r
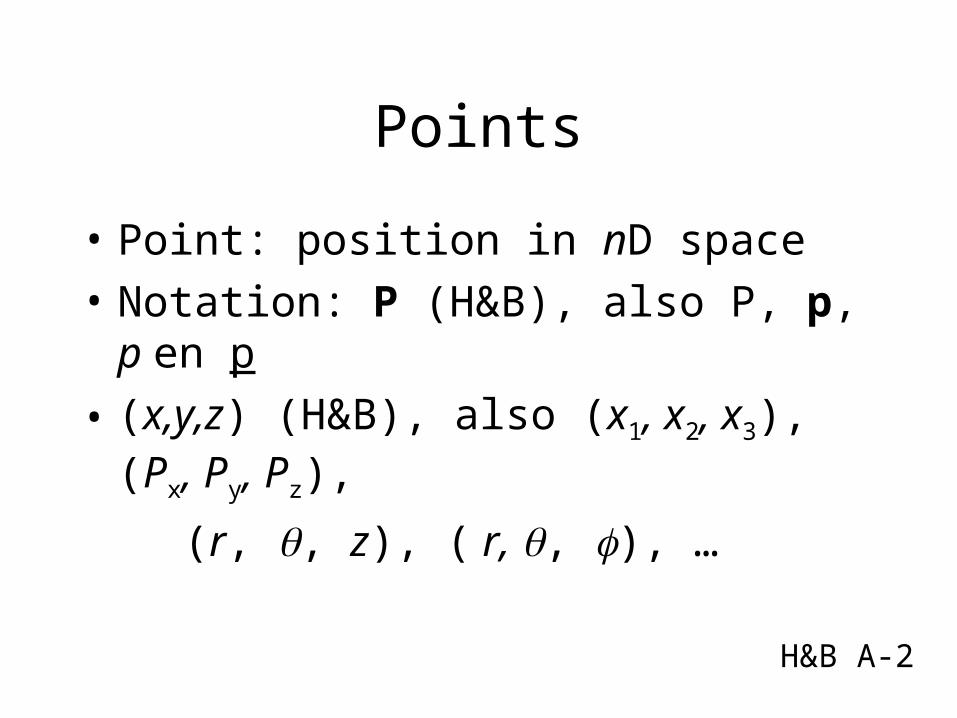
Points
• Point: position in nD space
• Notation: P (H&B), also P, p, p en p
• (x,y,z) (H&B), also (x1, x2, x3), (Px, Py, Pz),
(r, , z), ( r, , ), …
H&B A-2
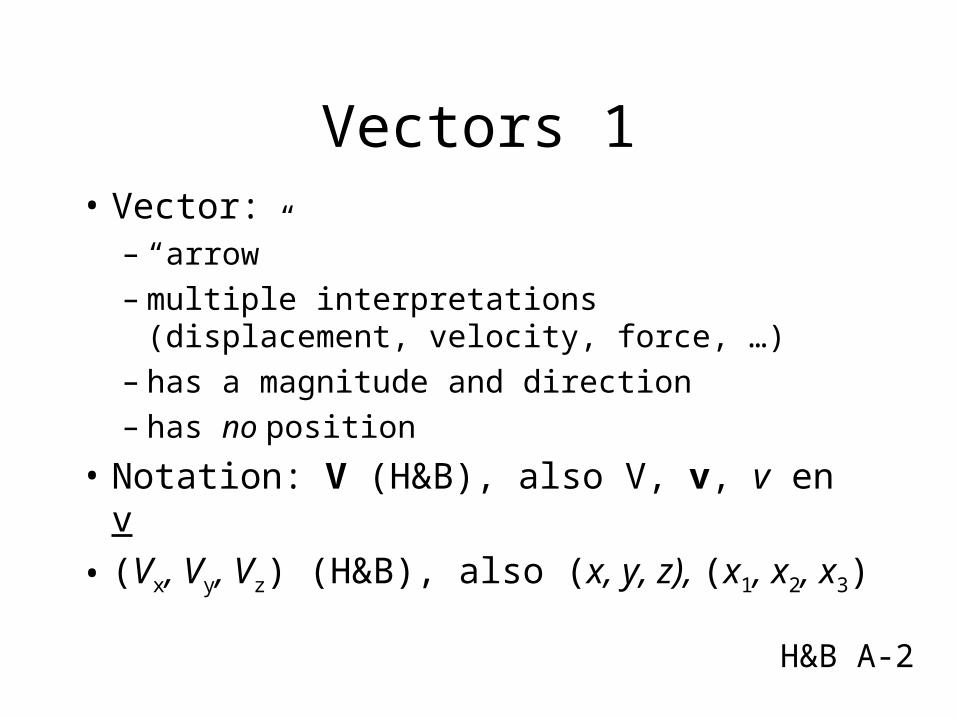
Vectors 1• Vector:
– “arrow”– multiple interpretations (displacement, velocity,
force, …)– has a magnitude and direction– has no position
• Notation: V (H&B), also V, v, v en v
• (Vx, Vy, Vz) (H&B), also (x, y, z), (x1, x2, x3)
H&B A-2
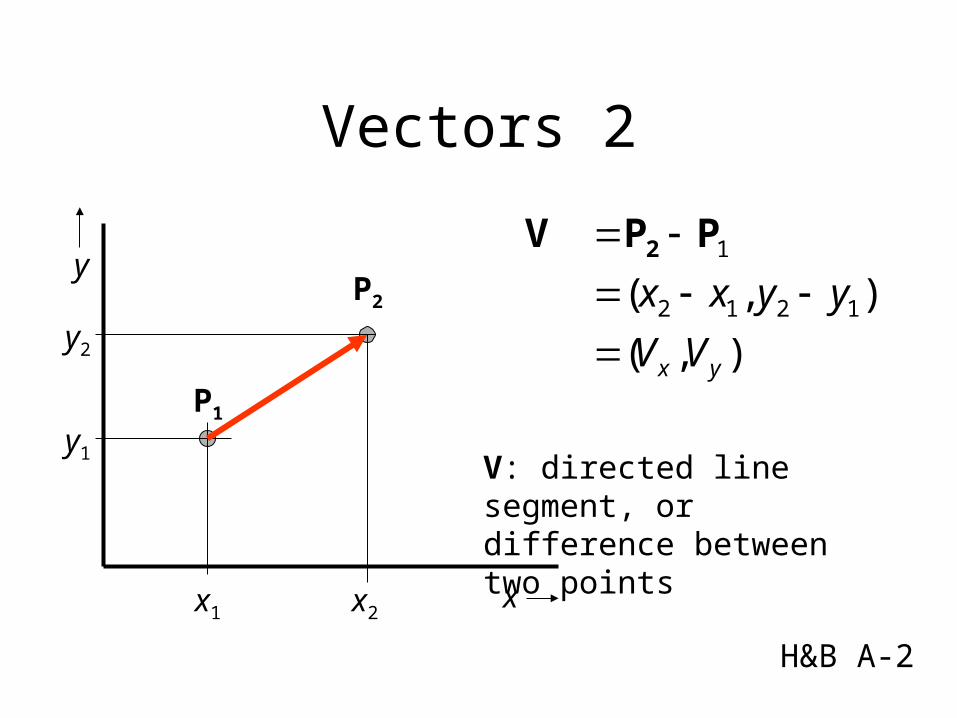
Vectors 2
),(
),( 1212
1
yx VV
yyxx
PPV 2
x
yP2
P1
x1 x2
y2
y1
H&B A-2
V: directed line segment, or difference between two points
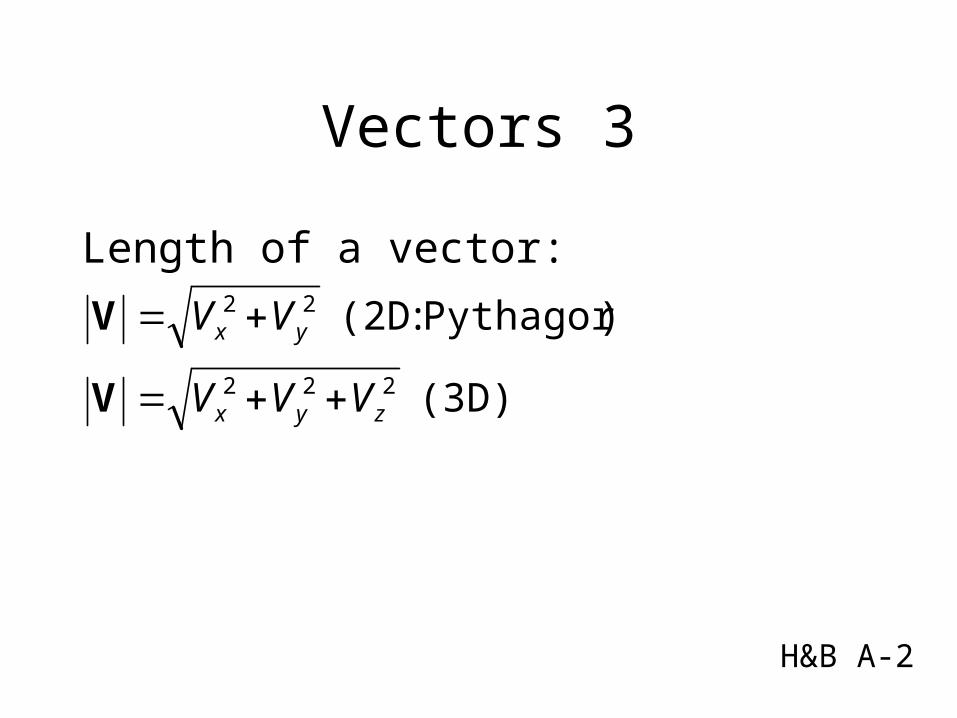
Length of a vector:
Vectors 3
(3D)
)Pythagoras :(2D
222
22
zyx
yx
VVV
VV
V
V
H&B A-2
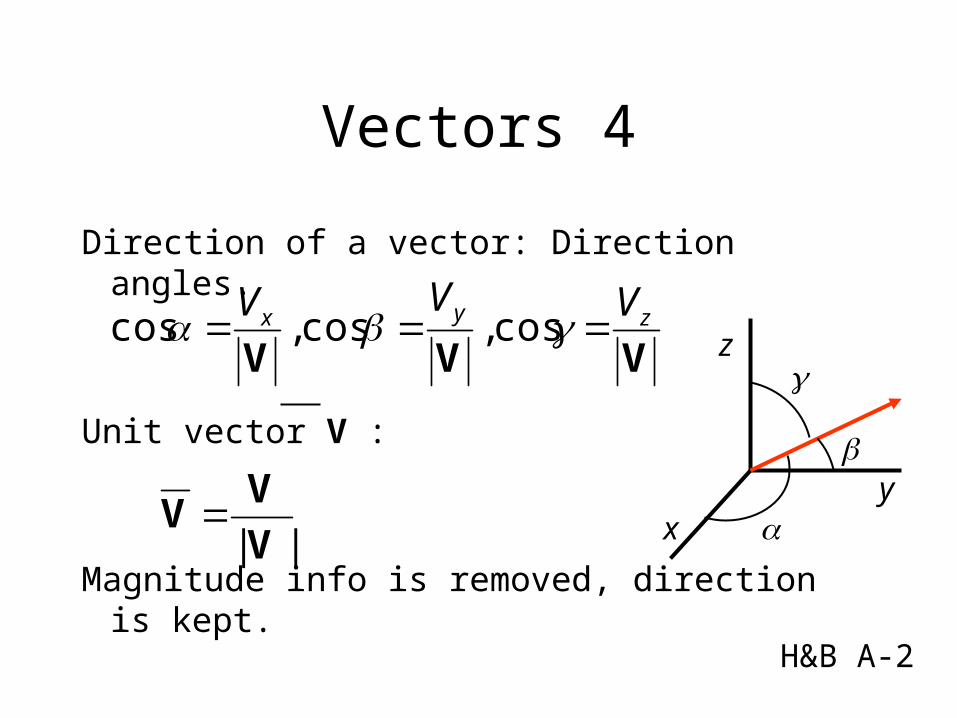
Direction of a vector: Direction angles.
Unit vector V :
Magnitude info is removed, direction is kept.
Vectors 4
H&B A-2
VVVzyx VVV
cos,cos,cos
xy
z
|| V
VV
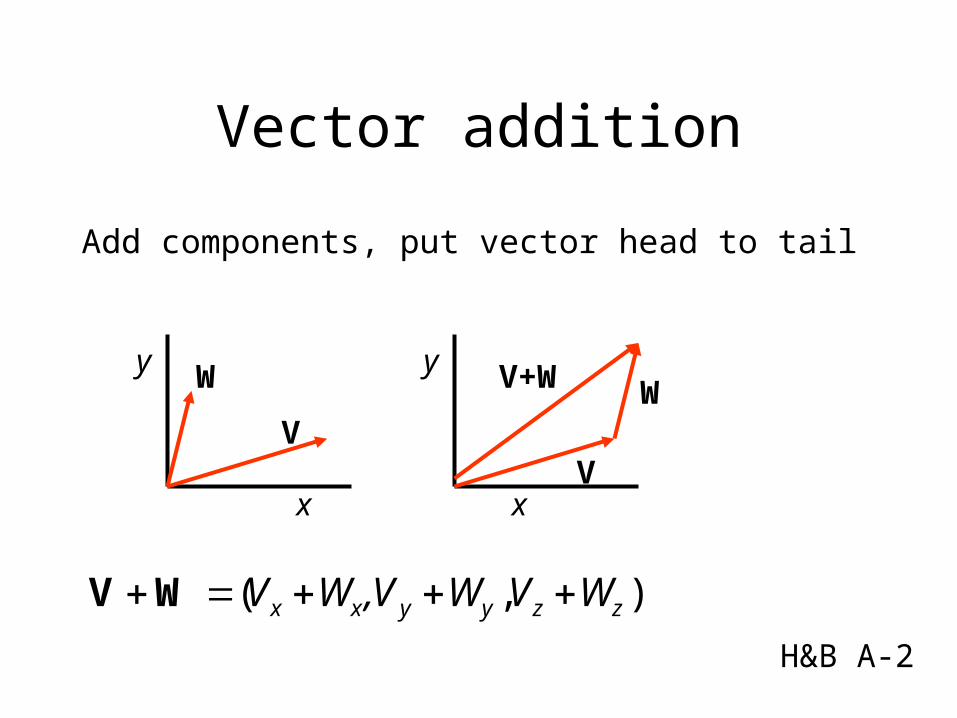
Add components, put vector head to tail
Vector addition
H&B A-2
x
y
x
y
VV
WW V+W
),( zzyyxx WVW,VWV WV
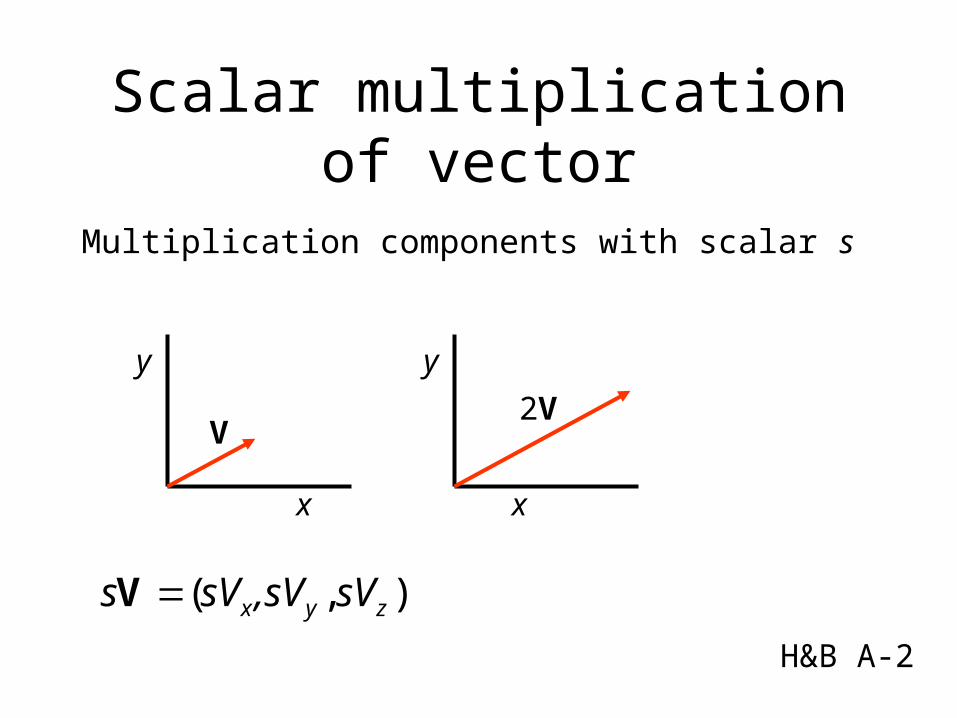
Multiplication components with scalar s
Scalar multiplication of vector
H&B A-2
x
y
x
y
V
),( zyx sV,sVsVs V
2V
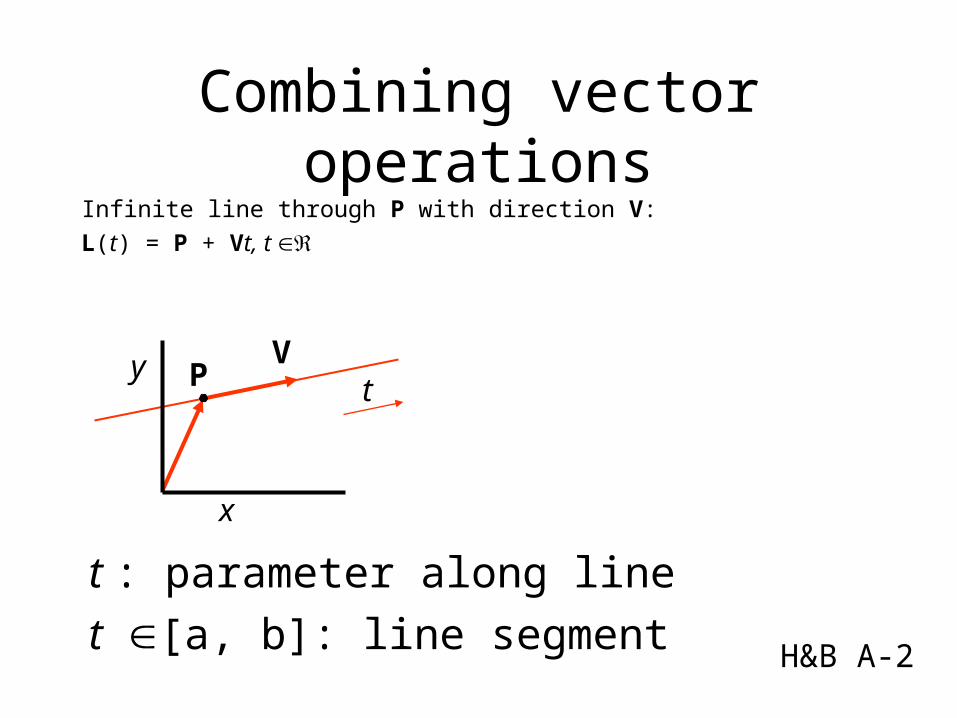
Infinite line through P with direction V:
L(t) = P + Vt, t
Combining vector operations
H&B A-2
x
y VP t
t : parameter along line
t [a, b]: line segment
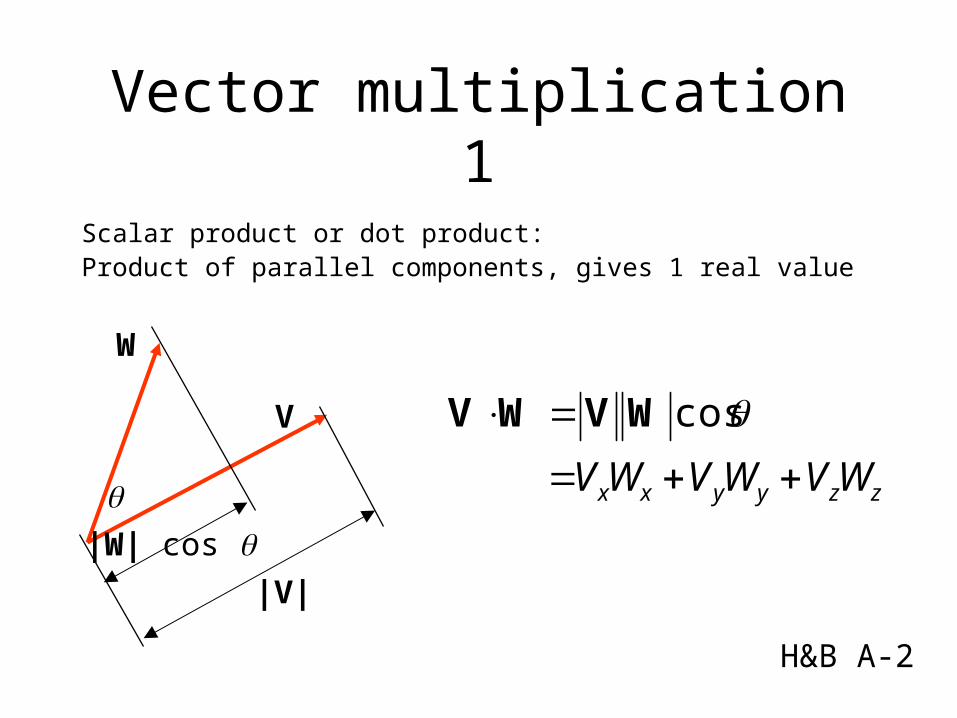
Scalar product or dot product:Product of parallel components, gives 1 real value
Vector multiplication 1
H&B A-2
V
zzyyxx WVWVWV
cosWVWV
W
|W| cos |V|
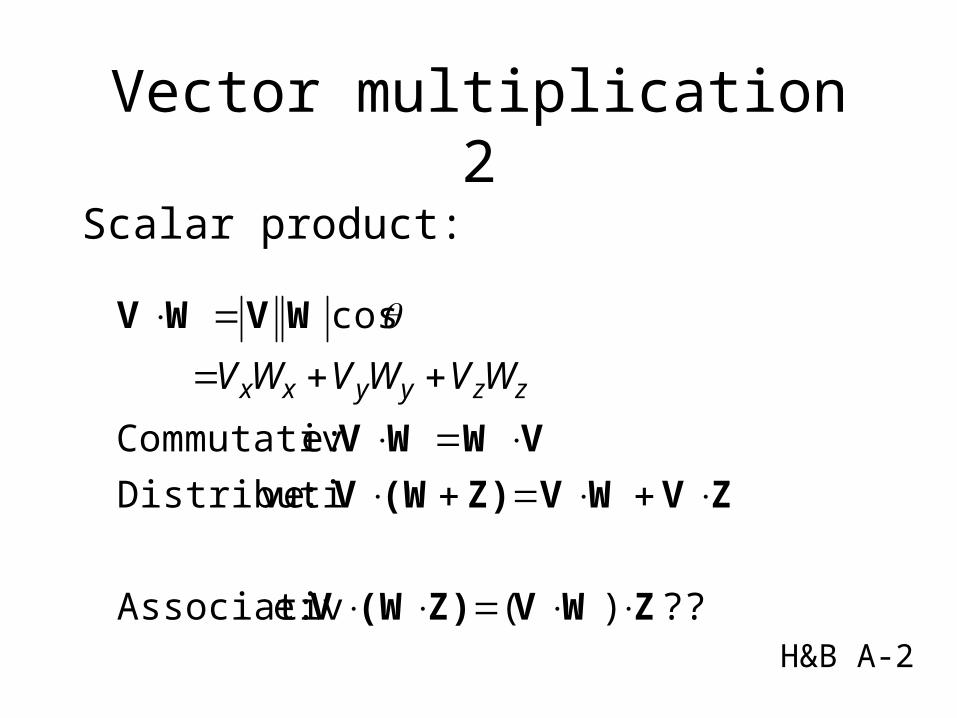
Scalar product:
Vector multiplication 2
H&B A-2
??)( :eAssociativ
:veDistributi
:eCommutativ
cos
ZWVZ)(WV
ZVWVZ)(WV
VWWV
WVWV
zzyyxx WVWVWV
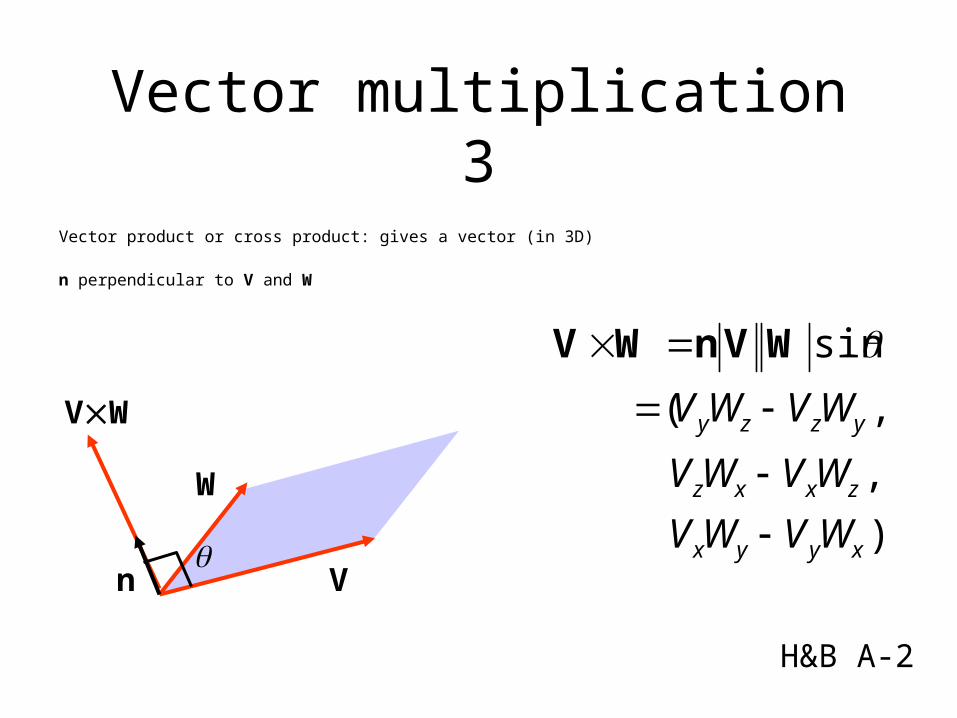
Vector product or cross product: gives a vector (in 3D)
n perpendicular to V and W
Vector multiplication 3
H&B A-2
V)
,
,(
sin
xyyx
zxxz
yzzy
WVWV
WVWV
WVWV
WVnWV
W
n
VW
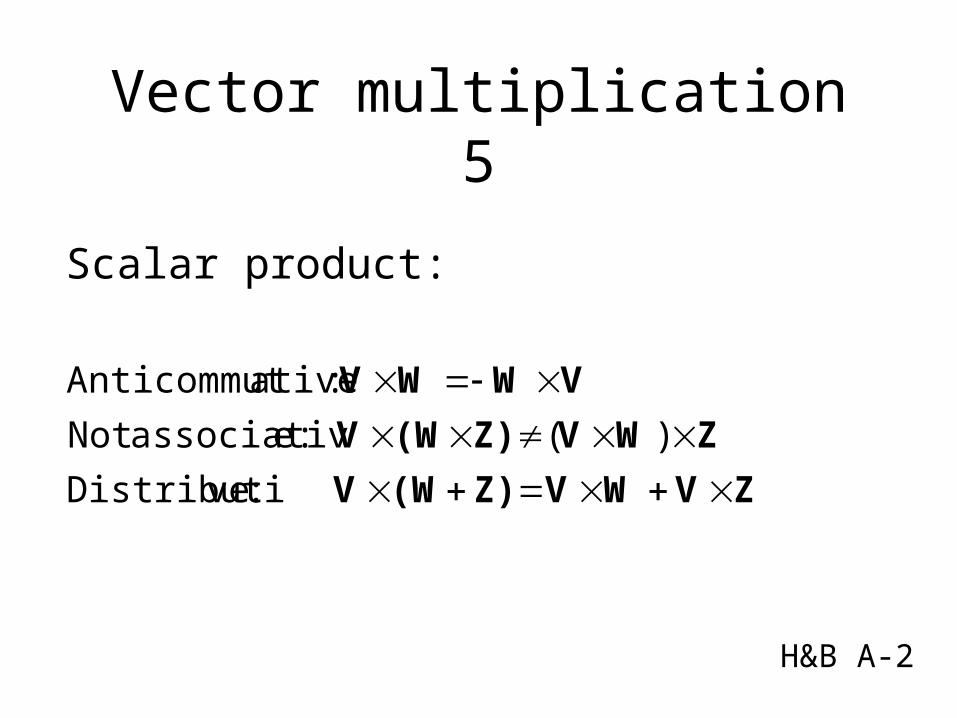
Scalar product:
Vector multiplication 5
H&B A-2
ZVWVZ)(WV
ZWVZ)(WV
VWWV
:veDistributi
)( :eassociativNot
:ativeAnticommut
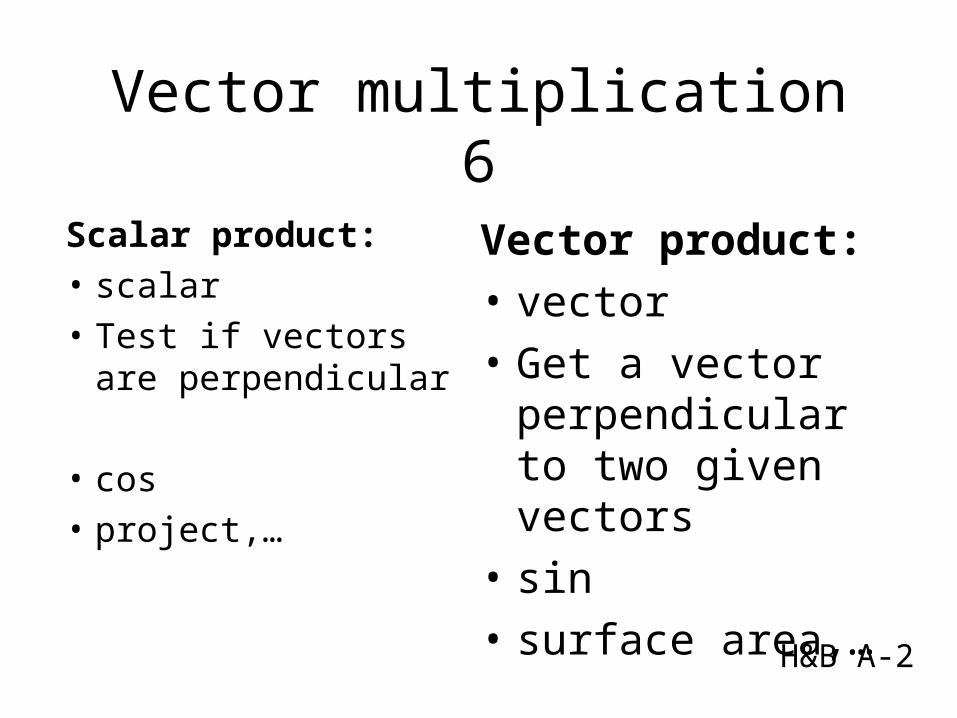
Scalar product: • scalar• Test if vectors are
perpendicular
• cos • project,…
Vector multiplication 6
H&B A-2
Vector product:
• vector
• Get a vector perpendicular to two given vectors
• sin
• surface area,…
W
W
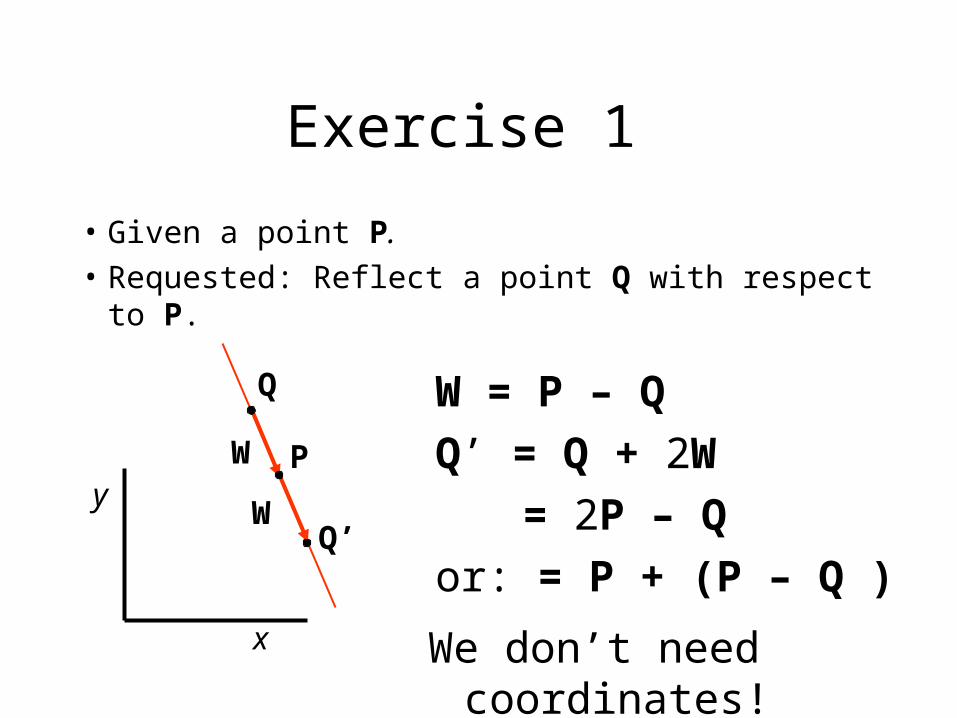
Exercise 1
• Given a point P.
• Requested: Reflect a point Q with respect to P.
x
yP
Q
Q’
W = P – Q
Q’ = Q + 2W
= 2P – Q
or: = P + (P – Q )
We don’t need coordinates!
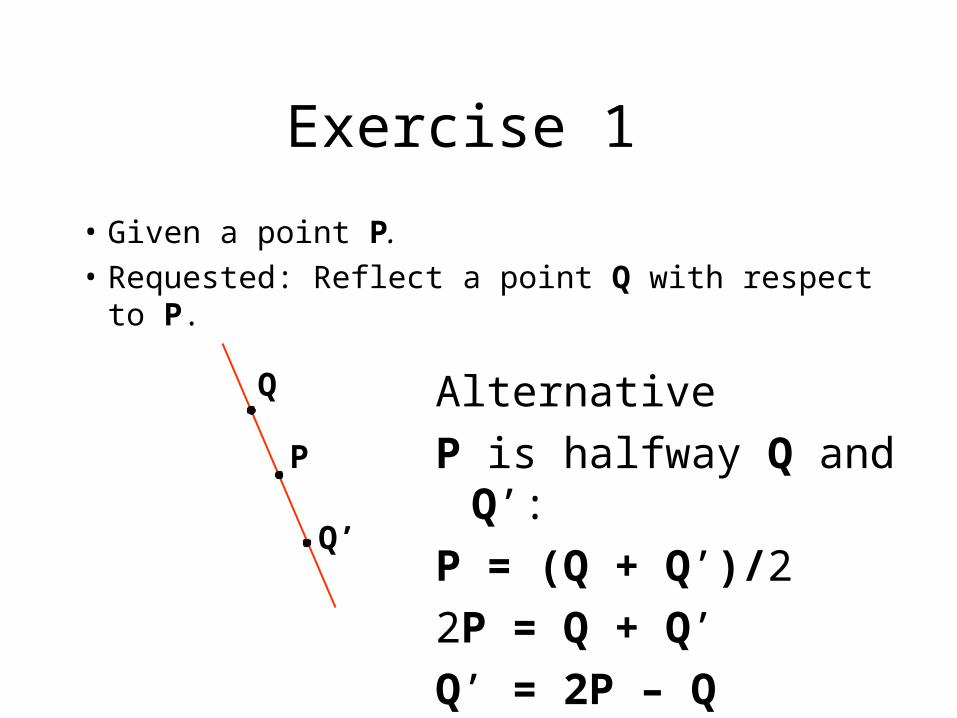
Exercise 1
• Given a point P.
• Requested: Reflect a point Q with respect to P.
P
Q
Q’
Alternative
P is halfway Q and Q’:
P = (Q + Q’)/2
2P = Q + Q’
Q’ = 2P – Q
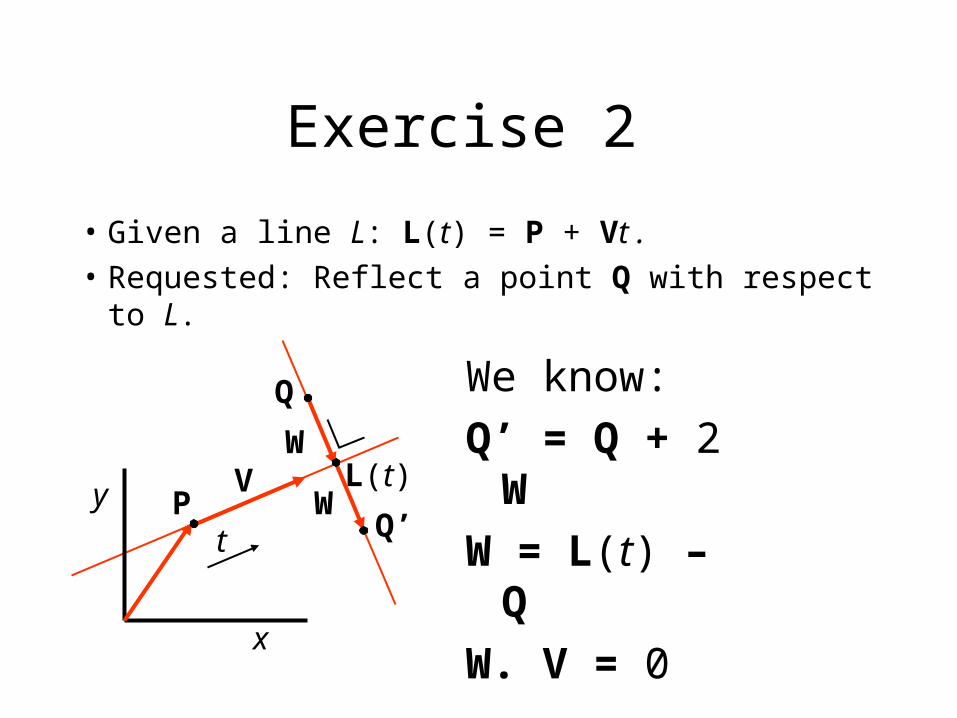
Exercise 2
• Given a line L: L(t) = P + Vt .
• Requested: Reflect a point Q with respect to L.
x
y VP
t
W
W
Q
Q’
L(t)
We know:
Q’ = Q + 2 W
W = L(t) – Q
W. V = 0
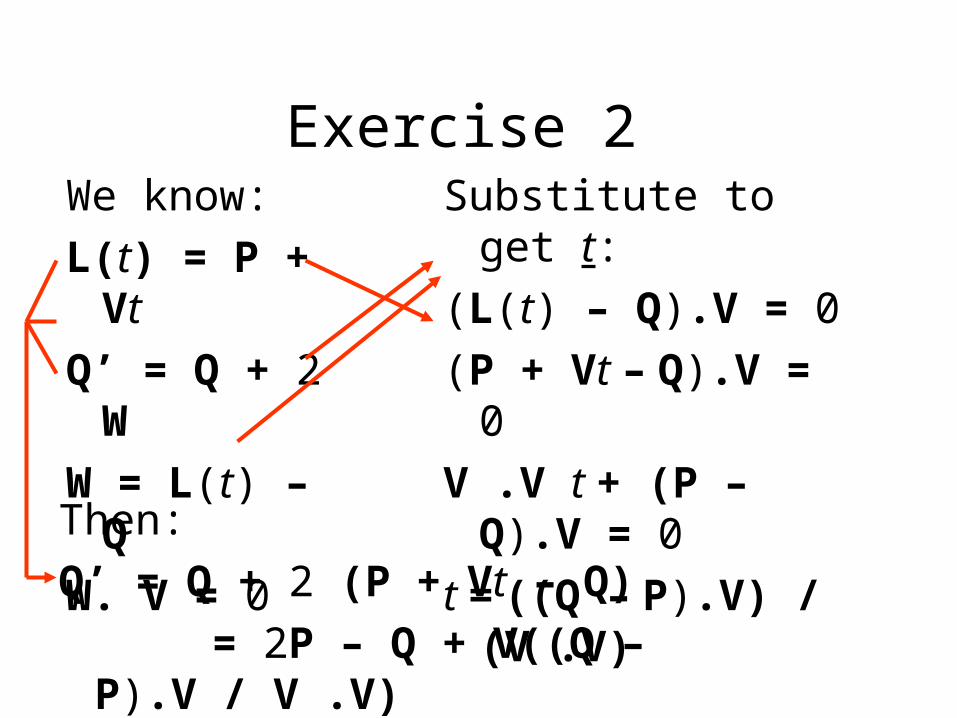
Exercise 2 We know:
L(t) = P + Vt
Q’ = Q + 2 W
W = L(t) – Q
W. V = 0
Substitute to get t:
(L(t) – Q).V = 0
(P + Vt – Q).V = 0
V .V t + (P – Q).V = 0
t = ((Q – P).V) / (V .V)
Then:
Q’ = Q + 2 (P + Vt – Q)
= 2P – Q + V((Q – P).V / V .V)
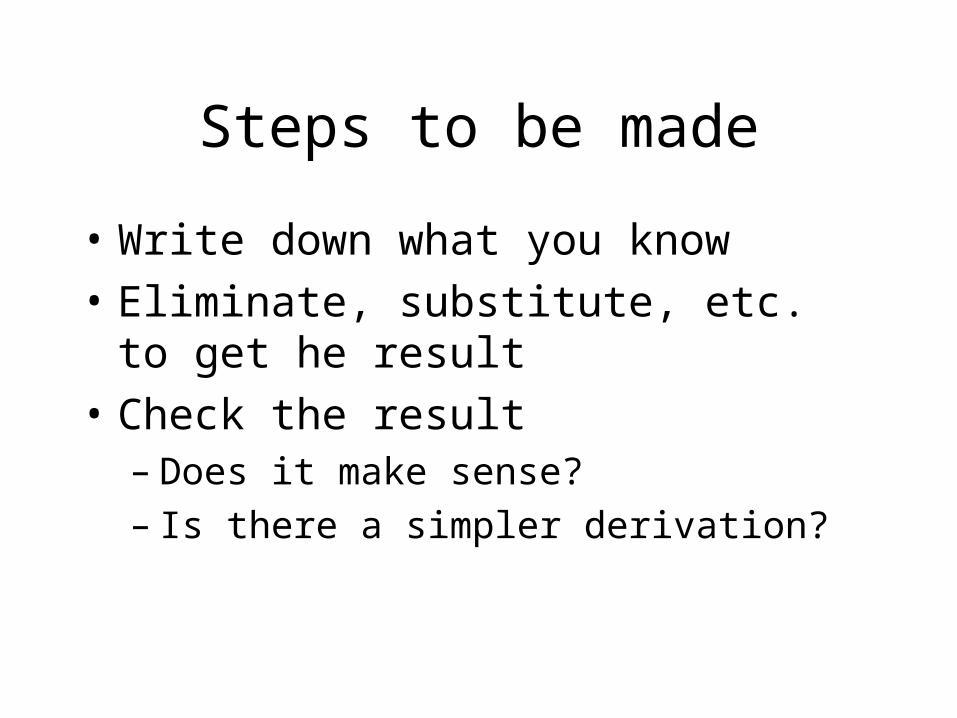
Steps to be made
• Write down what you know
• Eliminate, substitute, etc. to get he result
• Check the result– Does it make sense?– Is there a simpler derivation?
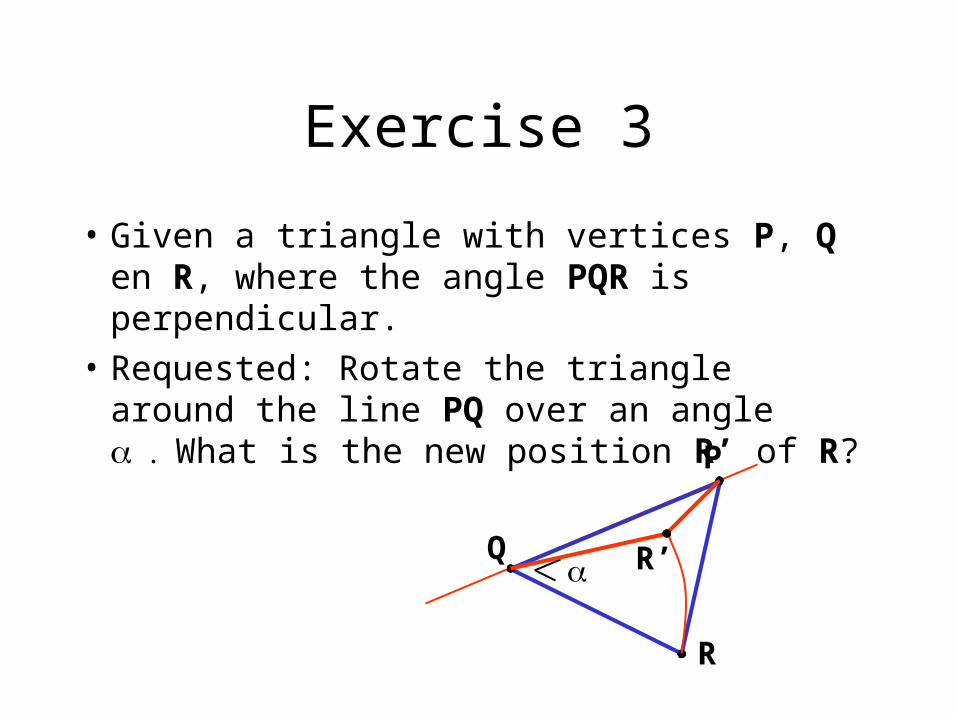
Exercise 3
• Given a triangle with vertices P, Q en R, where the angle PQR is perpendicular.
• Requested: Rotate the triangle around the line PQ over an angle What is the new position R’ of R?
R
P
Q R’
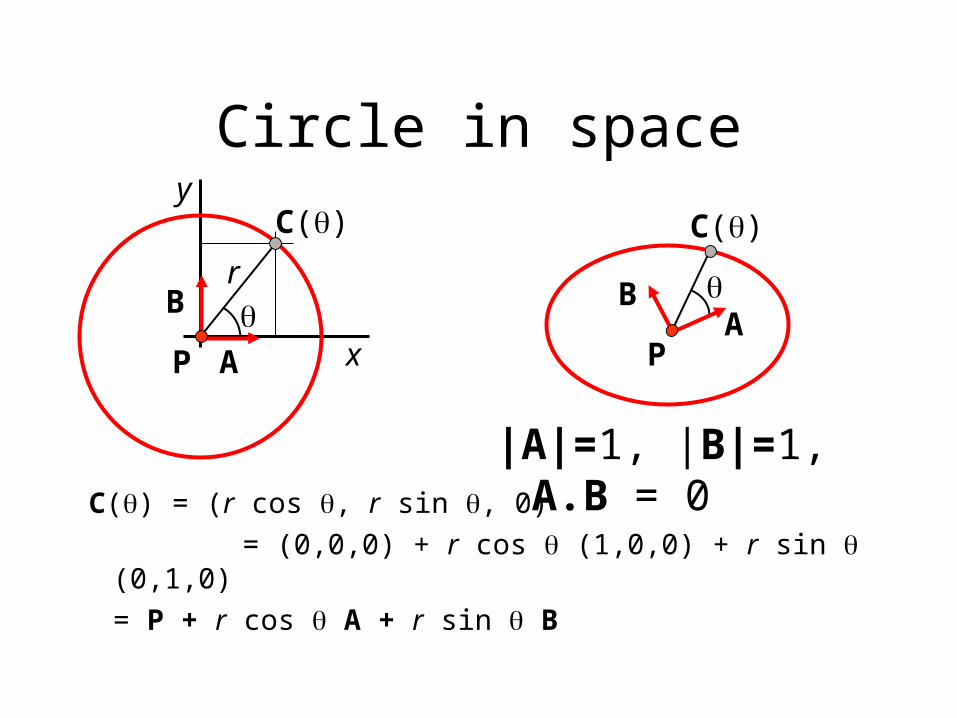
Circle in space
C() = (r cos , r sin , 0)
= (0,0,0) + r cos (1,0,0) + r sin (0,1,0)
= P + r cos A + r sin B
x
yC()
r
P A
B
C()
PA
B
|A|=1, |B|=1, A.B = 0
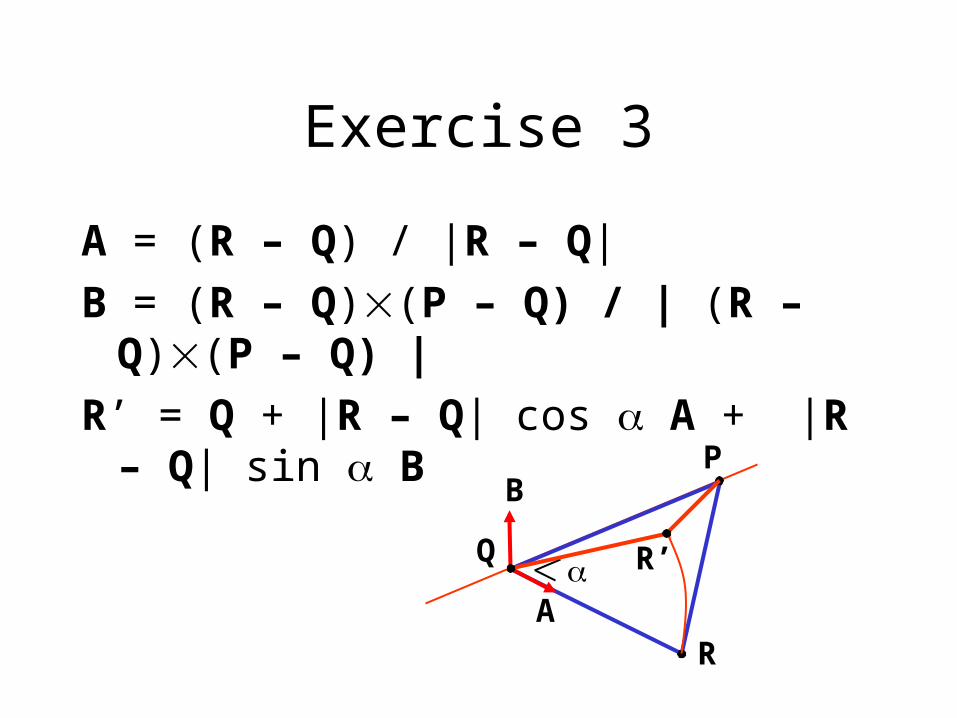
Exercise 3
R
P
Q R’
A
B
A = (R – Q) / |R – Q|
B = (R – Q)(P – Q) / | (R – Q)(P – Q) |
R’ = Q + |R – Q| cos A + |R – Q| sin B
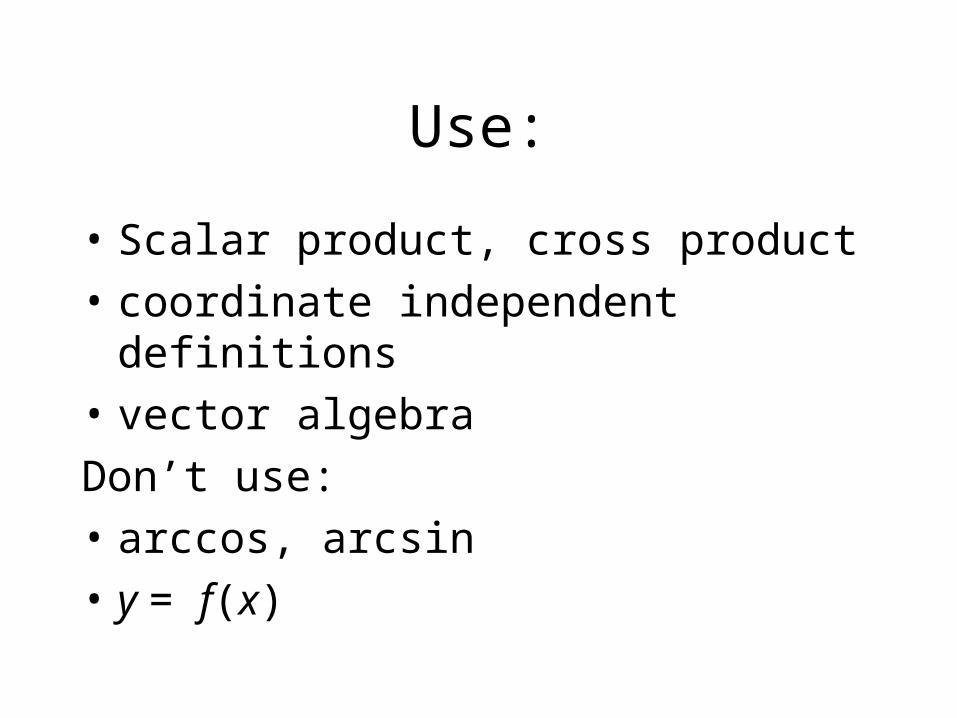
Use:
• Scalar product, cross product
• coordinate independent definitions
• vector algebra
Don’t use:
• arccos, arcsin
• y = f(x)
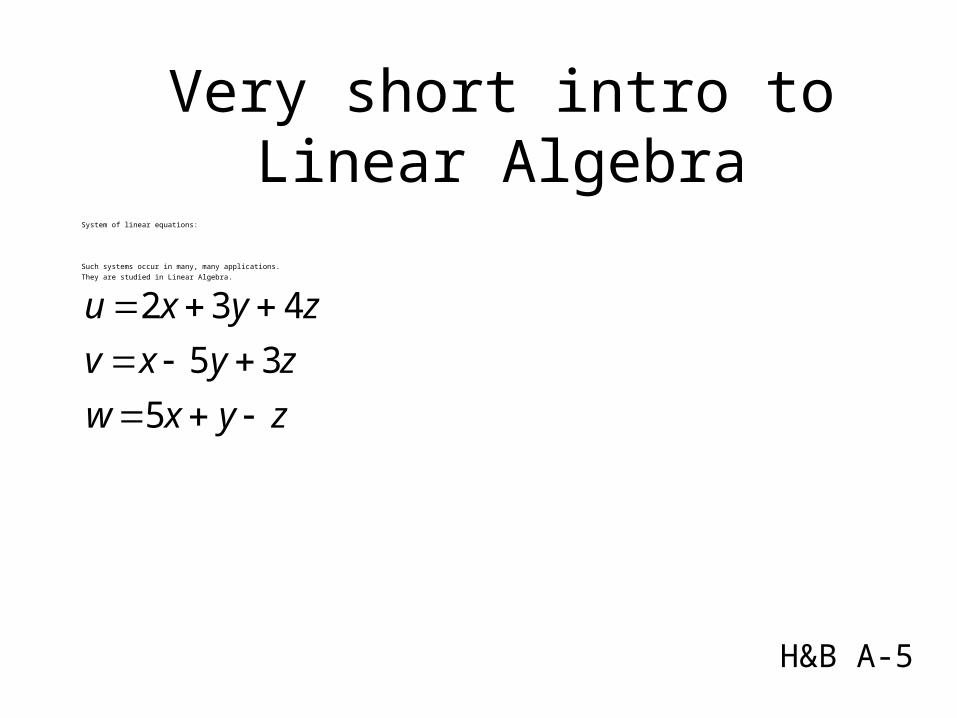
System of linear equations:
Such systems occur in many, many applications.
They are studied in Linear Algebra.
Very short intro to Linear Algebra
H&B A-5
zyxw
zyxv
zyxu
5
35
432
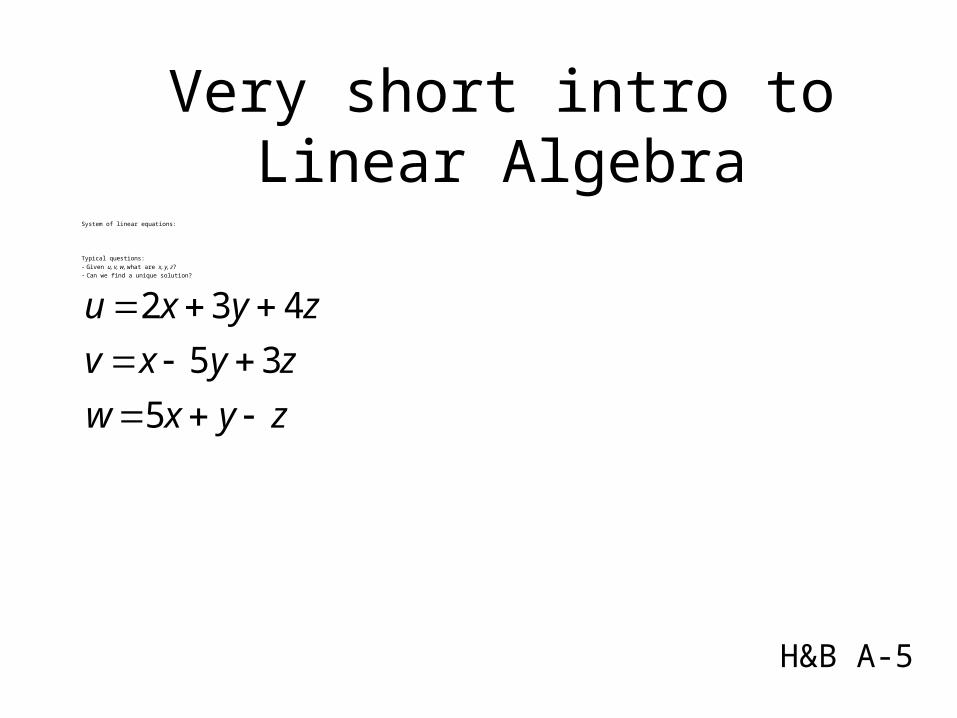
System of linear equations:
Typical questions:- Given u, v, w, what are x, y, z?- Can we find a unique solution?
H&B A-5
zyxw
zyxv
zyxu
5
35
432
Very short intro to Linear Algebra
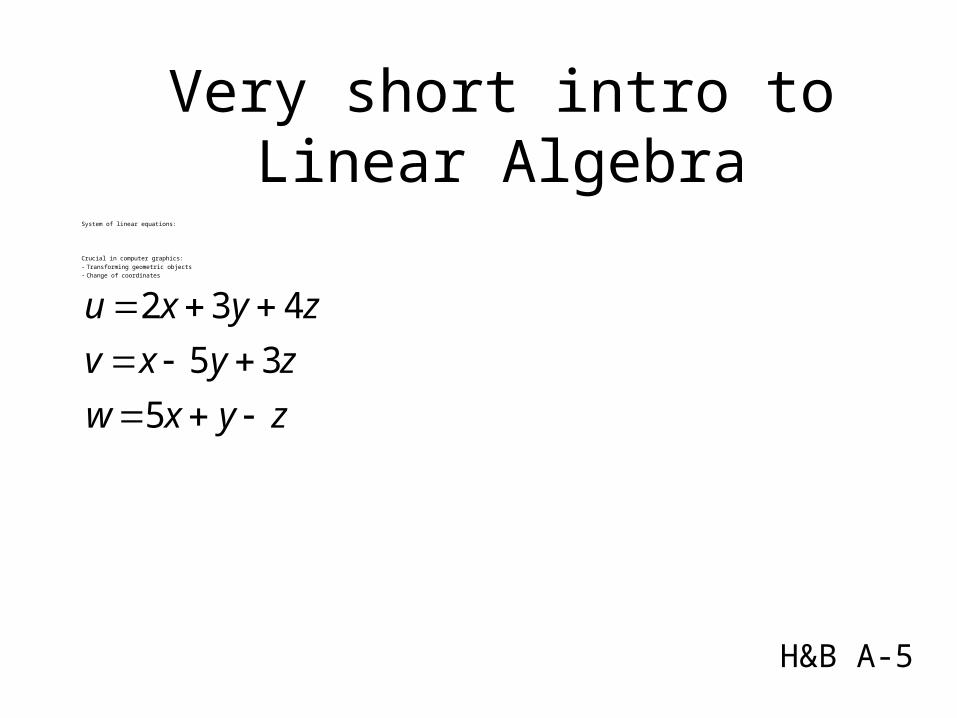
System of linear equations:
Crucial in computer graphics:- Transforming geometric objects- Change of coordinates
H&B A-5
zyxw
zyxv
zyxu
5
35
432
Very short intro to Linear Algebra
H&B A-5
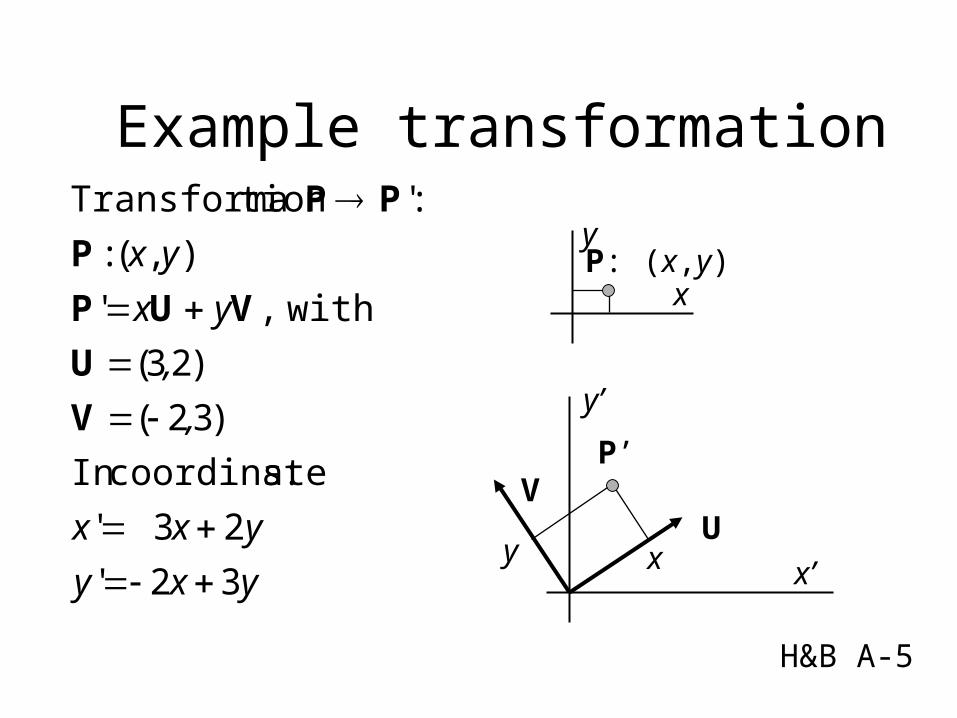
yxy
yxx
,
,
yx
yx
32'
23 '
:scoordinateIn
)32(
)23(
with,'
),(:
:'tion Transforma
V
U
VUP
P
PP
Example transformation
x’
y’
xyU
VP’
x
yP: (x,y)
Matrix:- Mathematical objects with operations
Matrix in computer graphics:- Defines a coordinate frame- Defines a transformation- Handy tool for manipulating transformations
What is a matrix?
H&B A-5
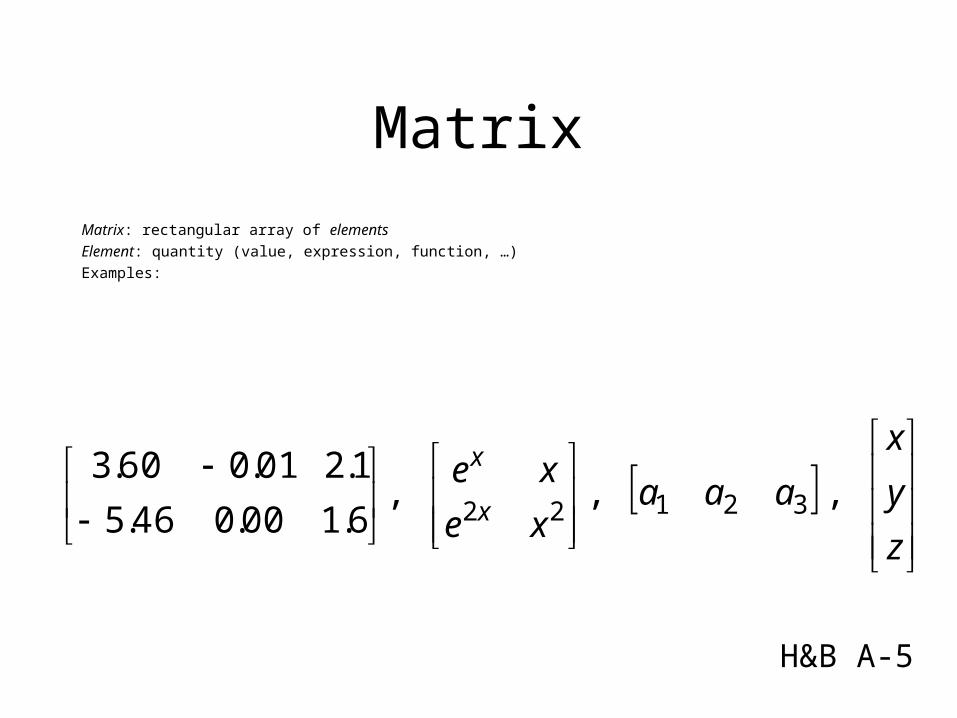
Matrix: rectangular array of elements
Element: quantity (value, expression, function, …)
Examples:
Matrix
H&B A-5
z
y
x
aaaxe
xex
x
,,,6.100.046.5
1.201.060.332122
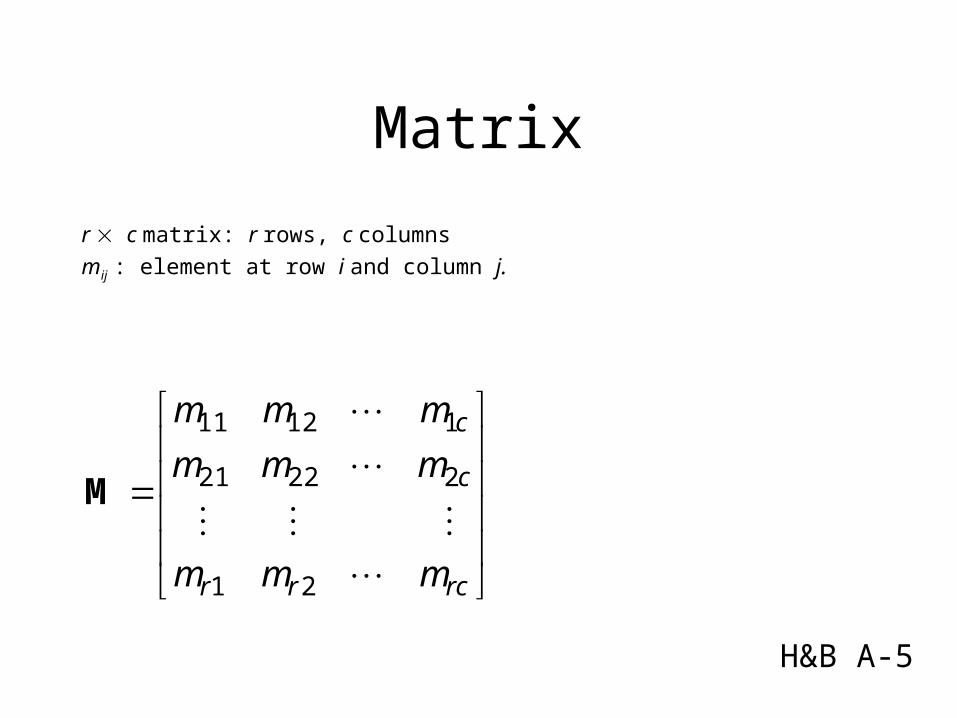
r c matrix: r rows, c columns
mij : element at row i and column j.
Matrix
H&B A-5
rcrr
c
c
mmm
mmm
mmm
21
22221
11211
M
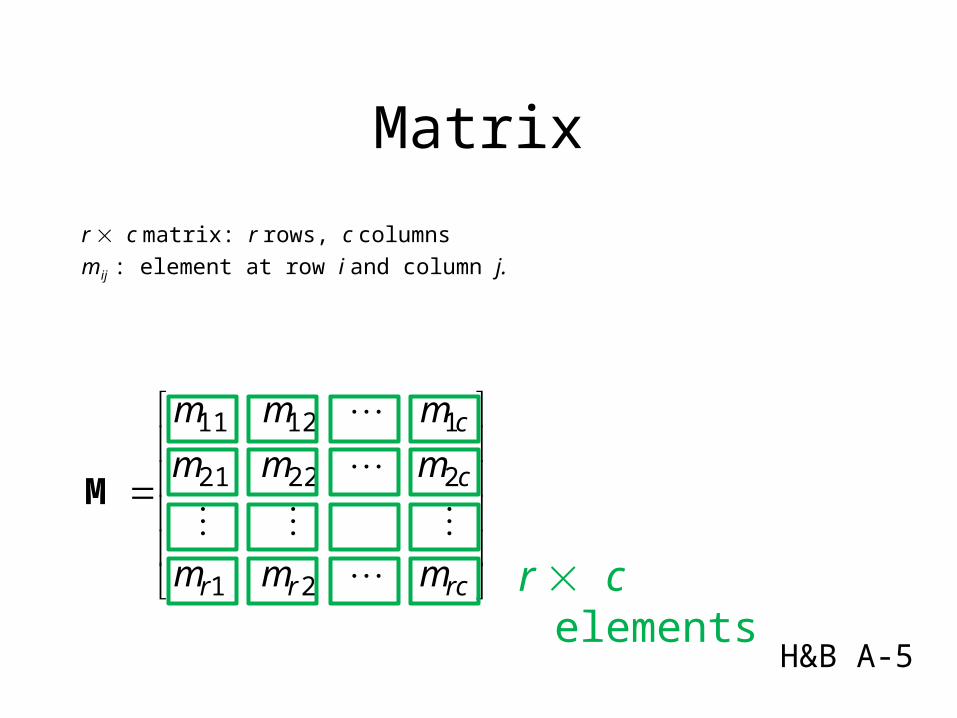
r c matrix: r rows, c columns
mij : element at row i and column j.
Matrix
H&B A-5
rcrr
c
c
mmm
mmm
mmm
21
22221
11211
M
r c elements
r c matrix: r rows, c columns
mij : element at row i and column j.
Matrix
H&B A-5
rcrr
c
c
mmm
mmm
mmm
21
22221
11211
M
c columns
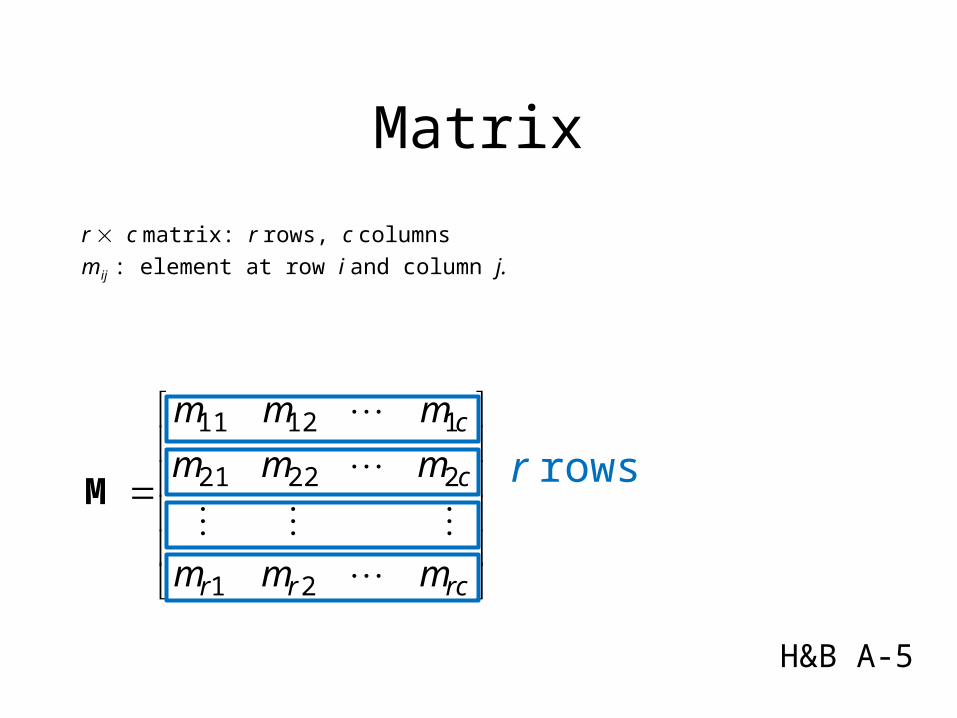
r c matrix: r rows, c columns
mij : element at row i and column j.
Matrix
H&B A-5
rcrr
c
c
mmm
mmm
mmm
21
22221
11211
Mr rows
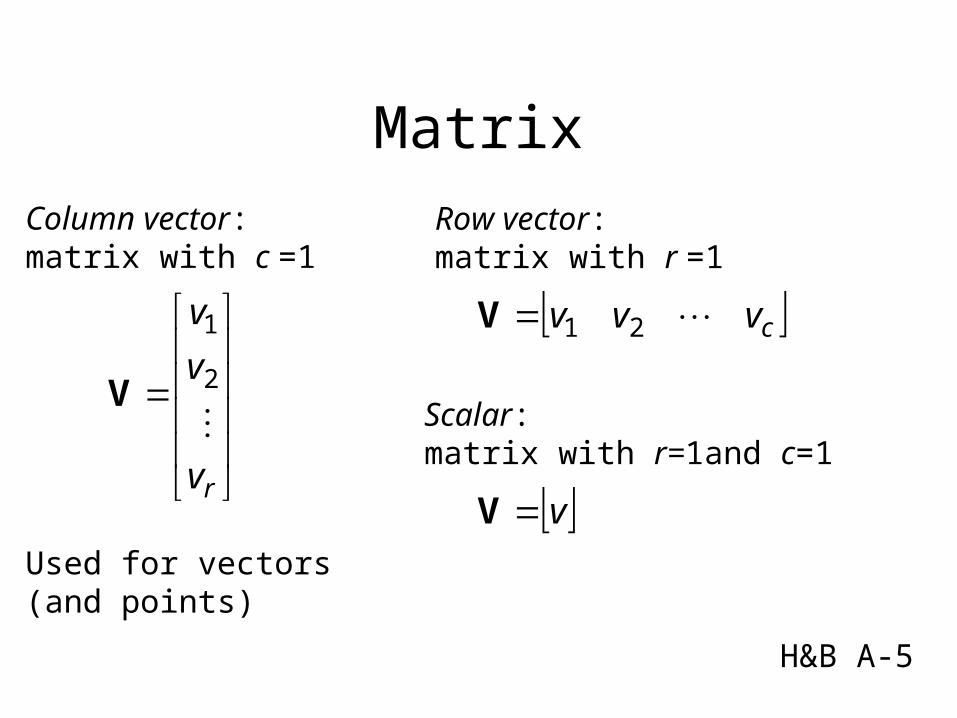
Matrix
H&B A-5
rv
v
v
2
1
V
Column vector:matrix with c =1
Used for vectors(and points)
cvvv 21V
Row vector:matrix with r =1
vV
Scalar:matrix with r=1and c=1
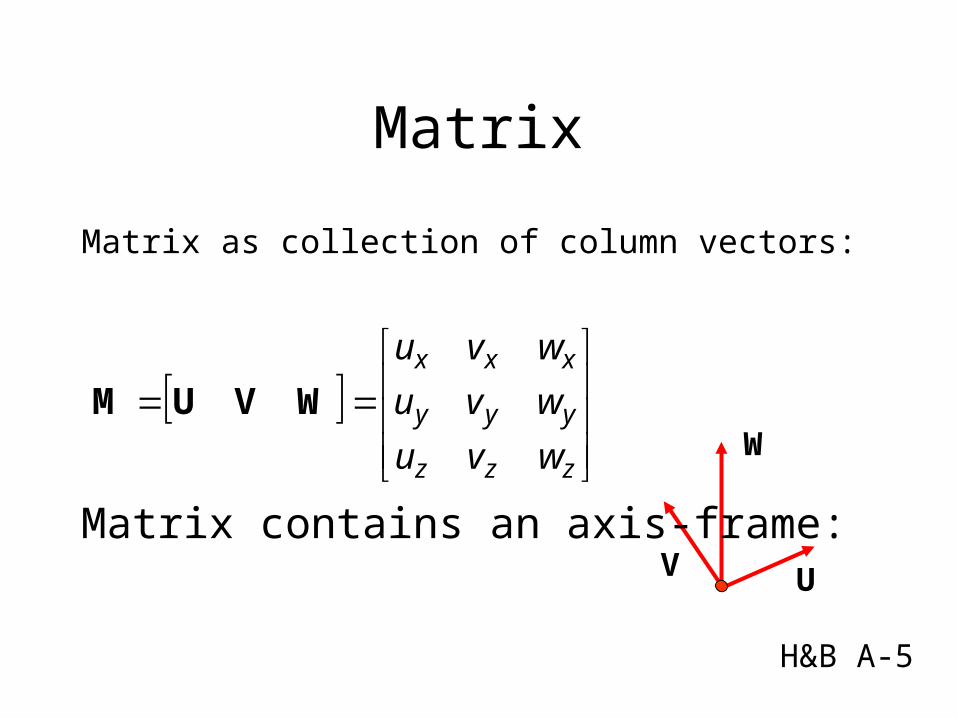
Matrix as collection of column vectors:
Matrix
H&B A-5
zzz
yyy
xxx
wvu
wvu
wvu
WVUM
UV
W
Matrix contains an axis-frame:
• Multiplication with scalar– simple
• Addition– simple
• Matrix-matrix multiplication– More difficult, but the most important
Operations on matrices
H&B A-5
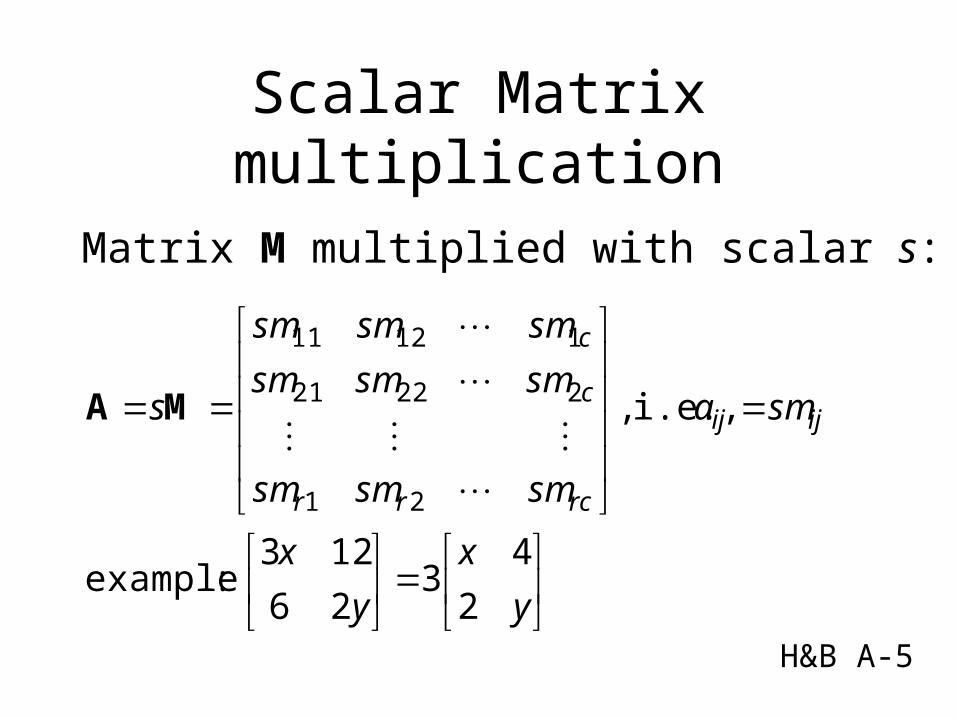
Matrix M multiplied with scalar s:
Scalar Matrix multiplication
H&B A-5
y
x
y
x
sma
smsmsm
smsmsm
smsmsm
s ijij
rcrr
c
c
2
43
26
123 :example
i.e.,,
21
22221
11211
MA
Scalar Matrix addition
H&B A-5
y
x
y
x
bam
bababa
bababa
bababa
bbb
bbb
bbb
aaa
aaa
aaa
ijijij
rcrcrrrr
cc
cc
rcrr
c
c
rcrr
c
c
28
243
02
104
26
123 :example
i.e.,,
2211
2222222121
1112121111
21
22221
11211
21
22221
11211
BAM
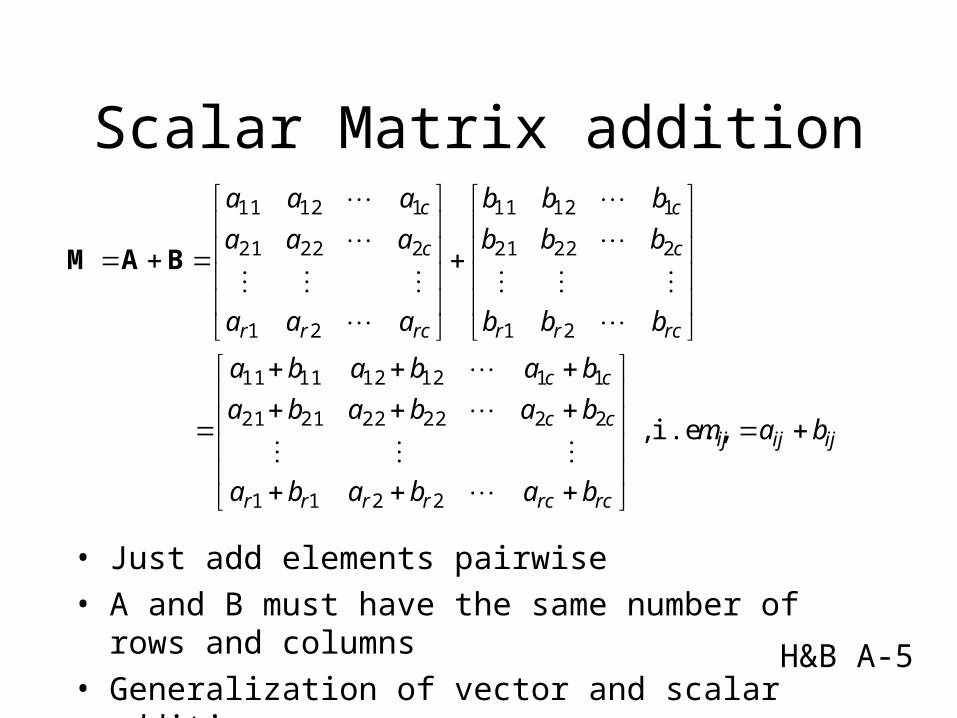
Scalar Matrix addition
H&B A-5
ijijij
rcrcrrrr
cc
cc
rcrr
c
c
rcrr
c
c
bam
bababa
bababa
bababa
bbb
bbb
bbb
aaa
aaa
aaa
i.e.,,
2211
2222222121
1112121111
21
22221
11211
21
22221
11211
BAM
• Just add elements pairwise
• A and B must have the same number of rows and columns
• Generalization of vector and scalar addition
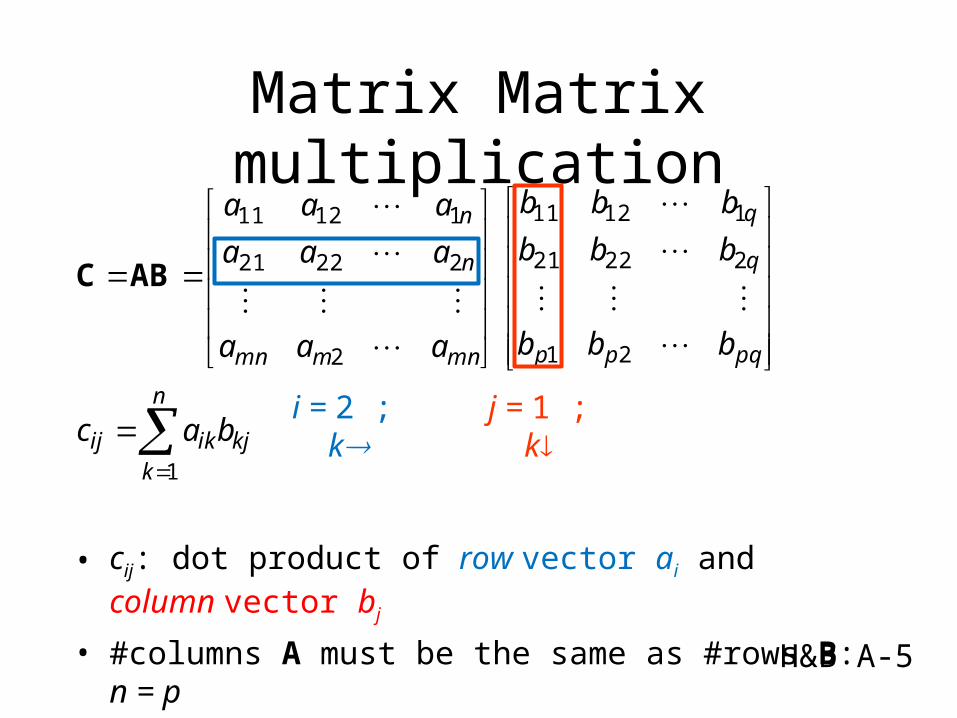
Matrix Matrix multiplication
H&B A-5
n
kkjikij
pqpp
q
q
mnmmn
n
n
bac
bbb
bbb
bbb
aaa
aaa
aaa
1
21
22221
11211
2
22221
11211
ABC
i = 2 ; k j = 1 ; k
• cij: dot product of row vector ai and column vector bj
• #columns A must be the same as #rows B: n = p
• C: m q matrix
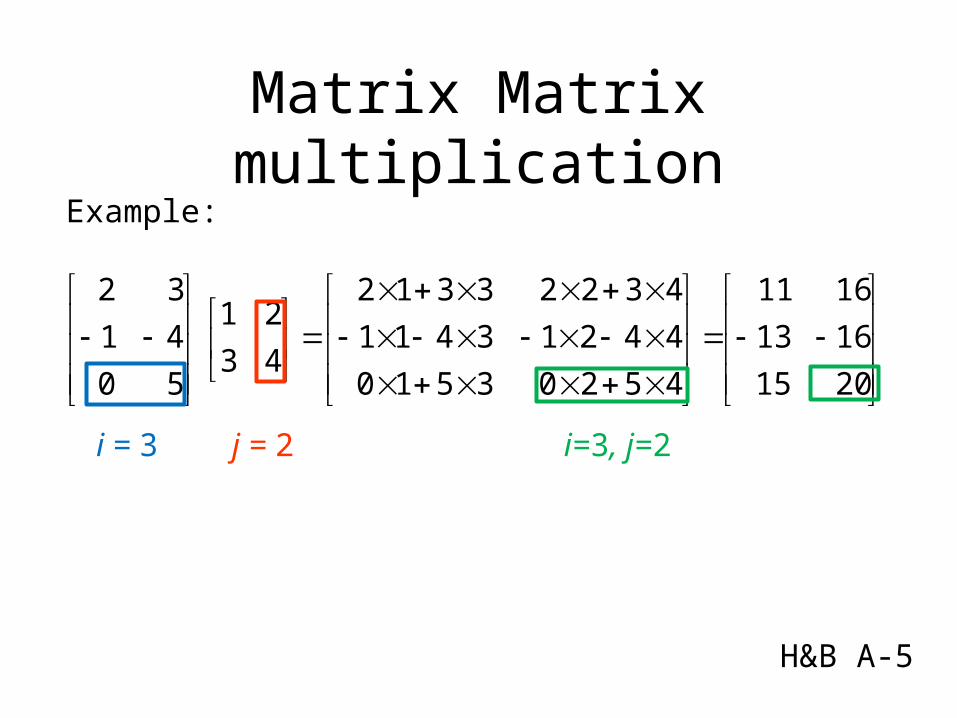
Matrix Matrix multiplication
H&B A-5
2015
1613
1611
45203510
44213411
43223312
43
21
50
41
32
i = 3 j = 2 i=3, j=2
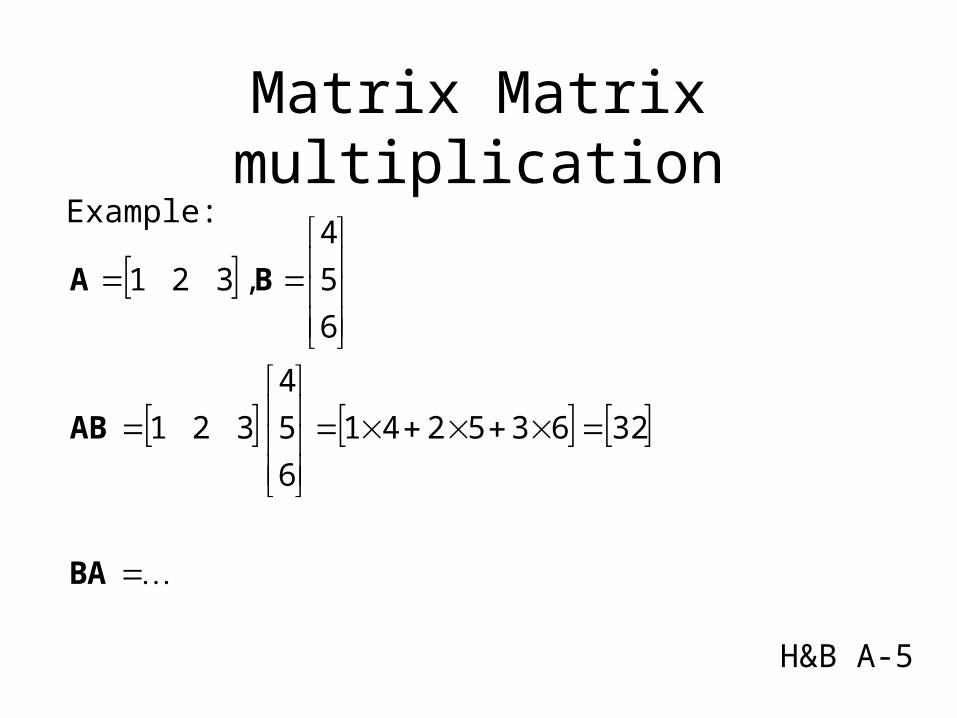
Example:
Matrix Matrix multiplication
H&B A-5
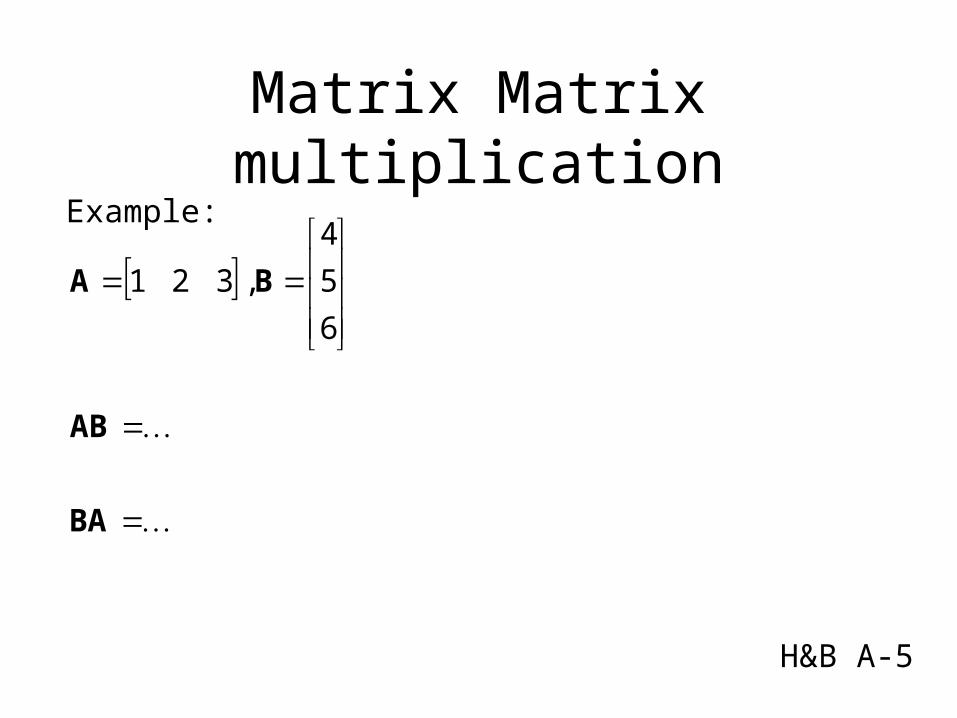
BA
AB
BA
6
5
4
,321
Example:
Matrix Matrix multiplication
H&B A-5
BA
AB
BA
32635241
6
5
4
321
6
5
4
,321
Example:
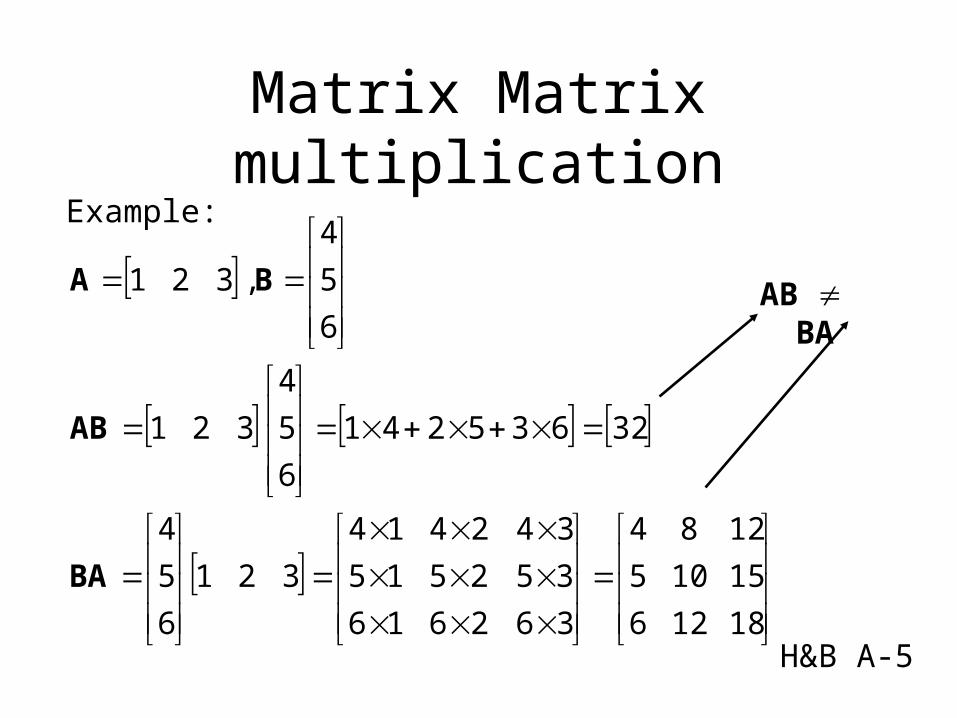
Matrix Matrix multiplication
H&B A-5
18126
15105
1284
362616
352515
342414
321
6
5
4
32635241
6
5
4
321
6
5
4
,321
BA
AB
BA
Example:
AB BA
Matrix Matrix multiplication
H&B A-5
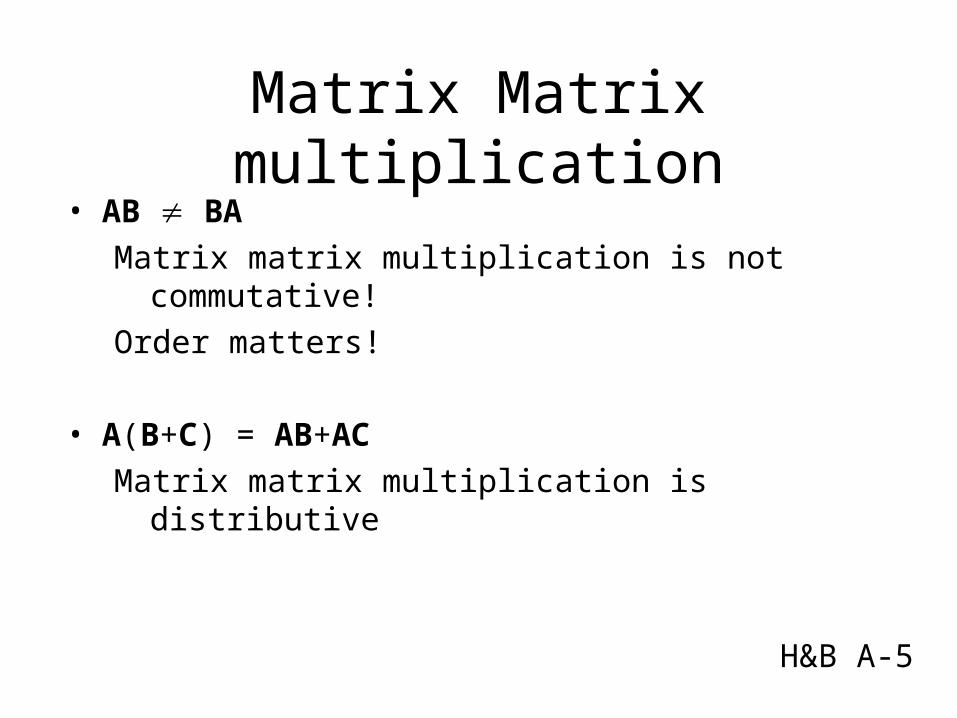
• AB BA
Matrix matrix multiplication is not commutative!
Order matters!
• A(B+C) = AB+AC
Matrix matrix multiplication is distributive
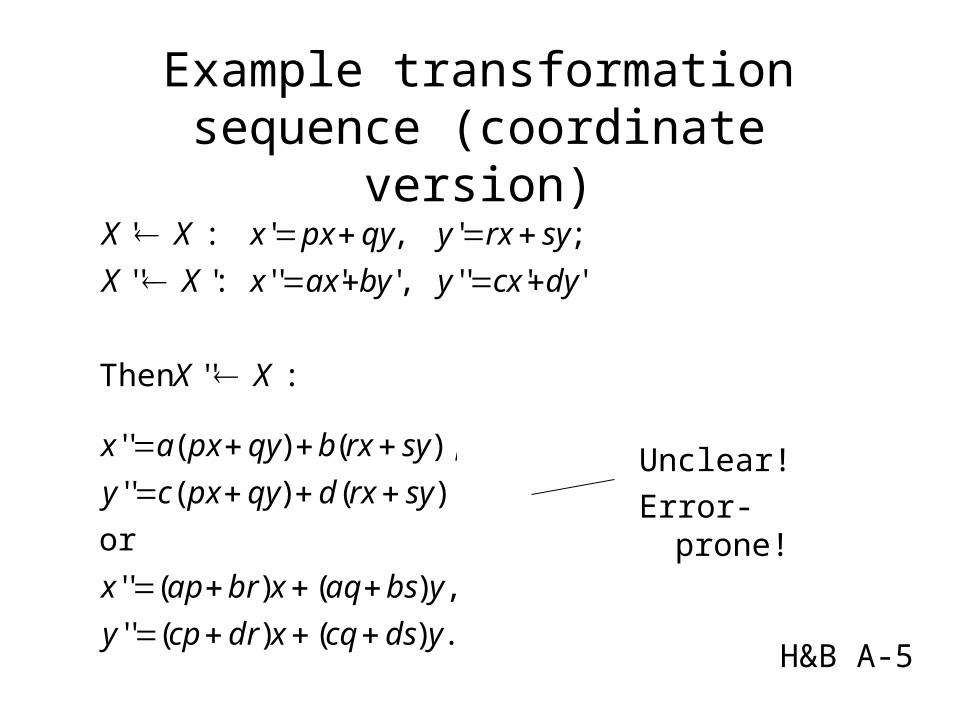
Example transformation sequence (coordinate version)
H&B A-5
:''Then
'.''','''':'''
;',':'
XX
dycxybyaxxXX
syrxyqypxxXX
Unclear!
Error-prone!
.)()(''
,)()(''
or
);()(''
),()(''
ydscqxdrcpy
ybsaqxbrapx
syrxdqypxcy
syrxbqypxax
H&B A-5
y
x
dscqdrcp
bsaqbrap
y
x
sr
qp
dc
ba
y
x
XX
y
x
dc
ba
y
xXX
y
x
sr
qp
y
xXX
''
''
:''Then
.'
'
''
'':'''
;'
':'
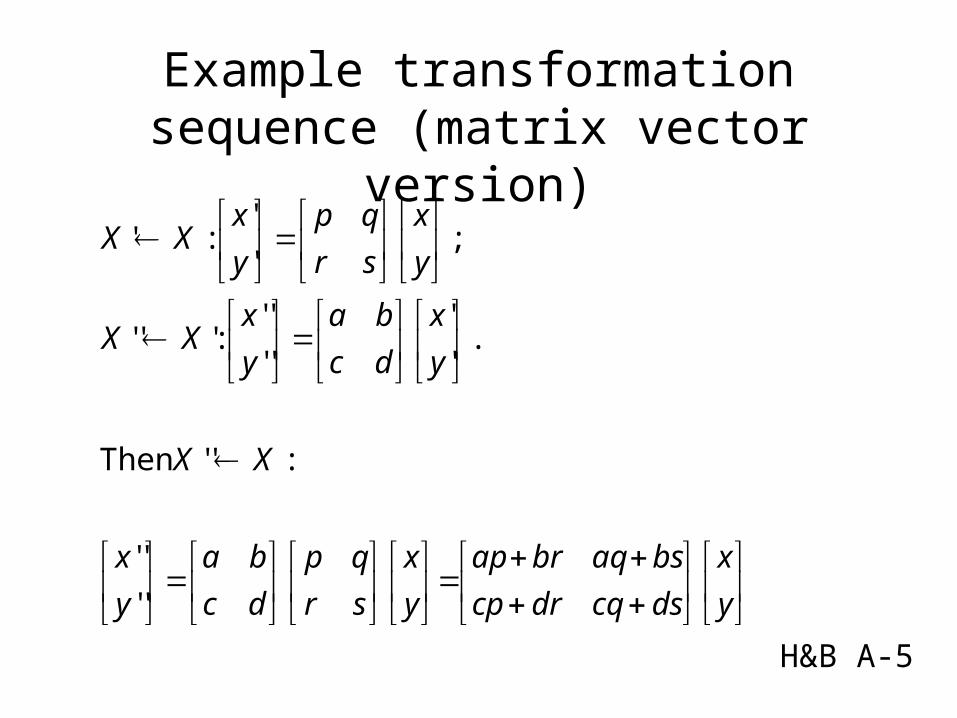
Example transformation sequence (matrix vector version)
H&B A-5
BAX'X'
BX''X'
AXX
:''Then
:'''
;':'
XX
XX
XX
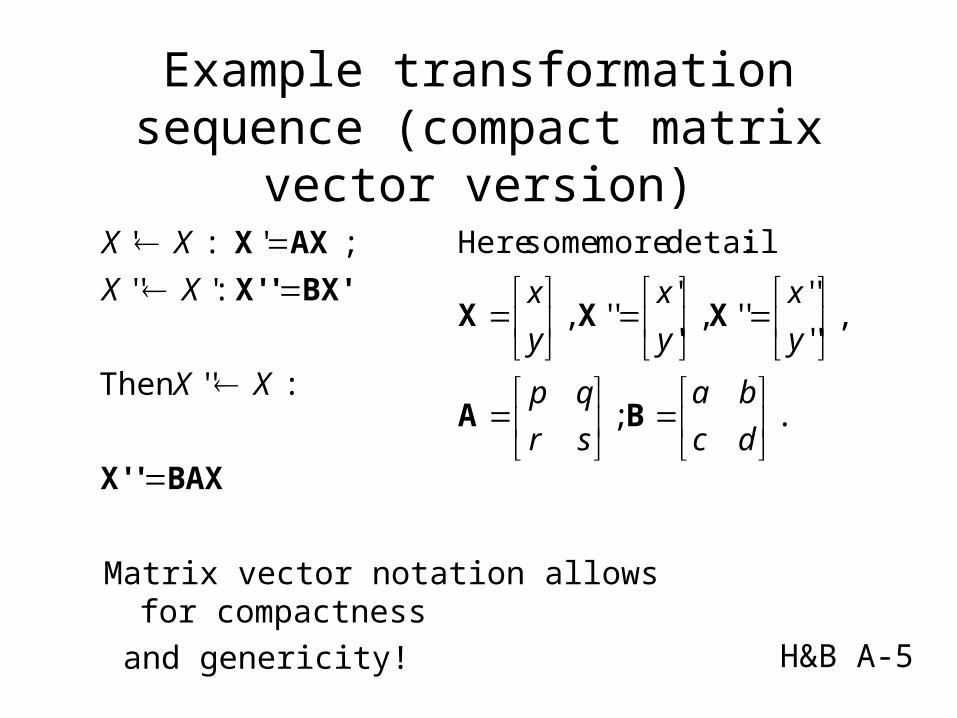
Example transformation sequence (compact matrix vector version)
.;
,''
'''',
'
''',
:detail more some Here
dc
ba
sr
qp
y
x
y
x
y
x
BA
XXX
Matrix vector notation allows for compactness
and genericity!
H&B A-5
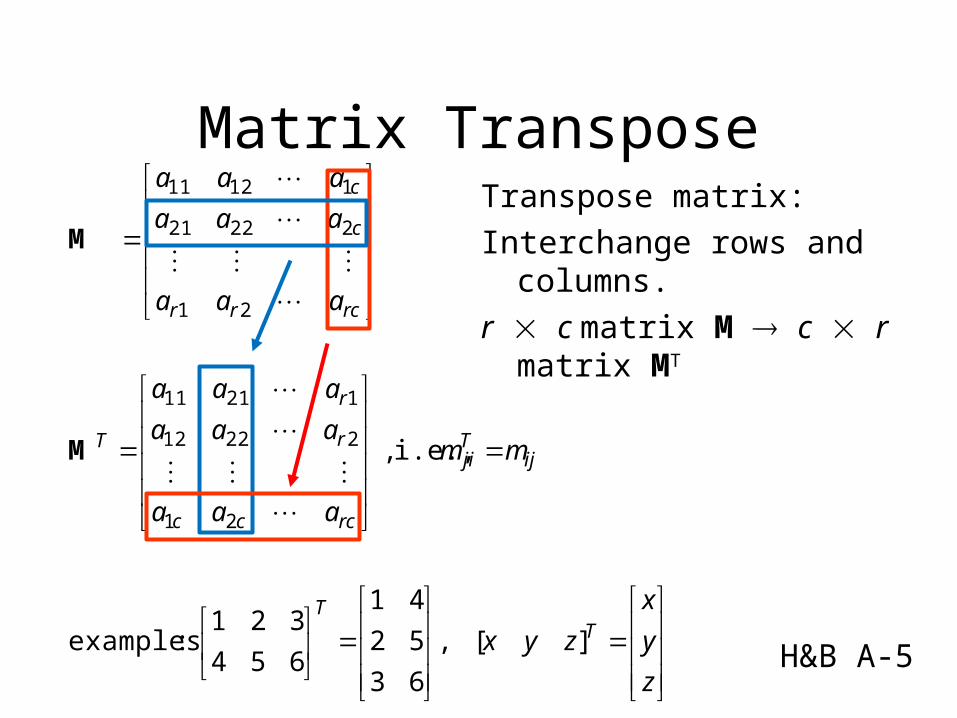
Matrix TransposeTranspose matrix:
Interchange rows and columns.
r c matrix M c r matrix MT
z
y
x
zyx
mm
aaa
aaa
aaa
aaa
aaa
aaa
TT
ijTji
rccc
r
r
T
rcrr
c
c
][,
63
52
41
654
321 :examples
i.e.,,
21
22212
12111
21
22221
11211
M
M
H&B A-5
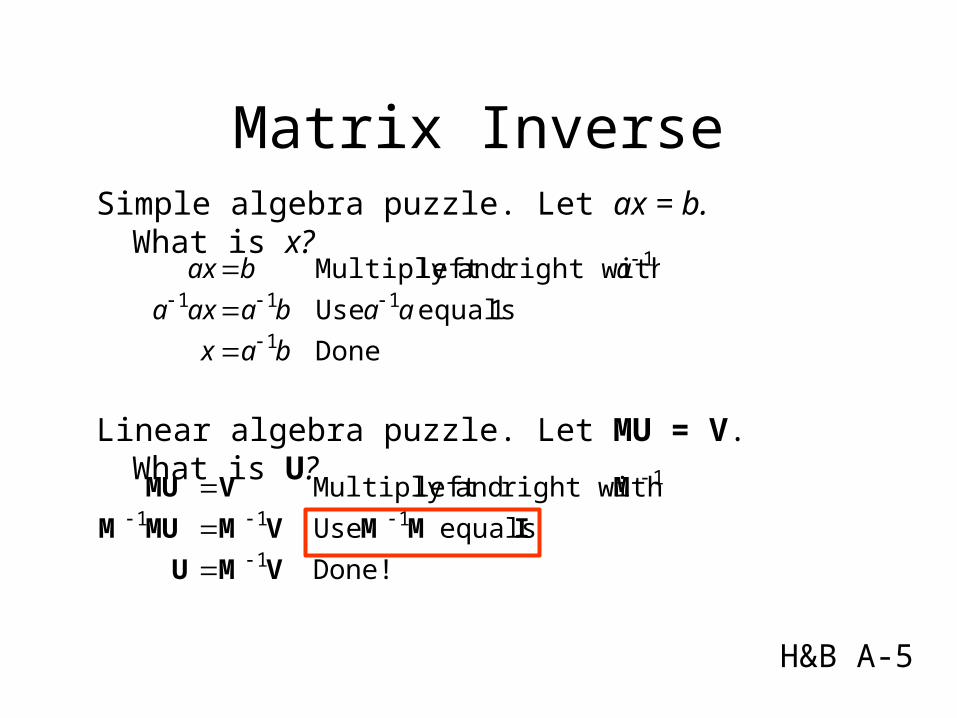
Matrix InverseSimple algebra puzzle. Let ax = b. What is x?
Done
1 equals Use
right with andleft Multiply
1
111
1
bax
aabaaxa
abax
Done!
equals Use
right with andleft Multiply
1
111
1
VMU
IMMVMMUM
MVMU
Linear algebra puzzle. Let MU = V. What is U?
H&B A-5
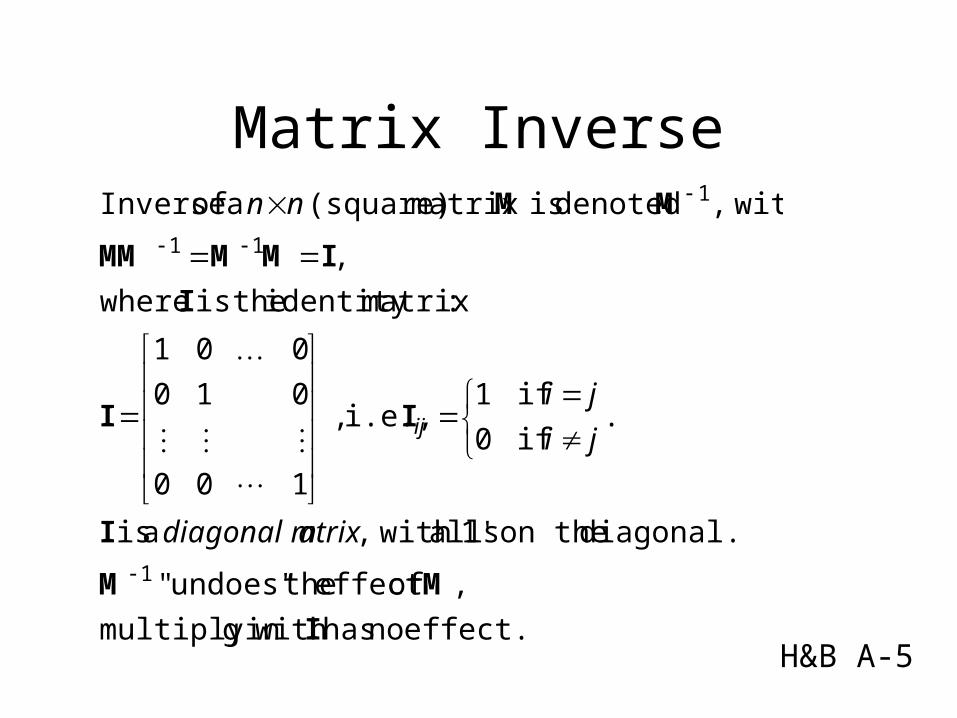
Matrix Inverse
effect. no has with gmultiplyin
, ofeffect theundoes""
diagonal. on the s1' all with , a is
. if0
if1 i.e., ,
100
010
001
:matrixidentity theis where
,
with, denoted is matrix (square) a of Inverse
1
11
1
I
MM
I
II
I
IMMMM
MM
atrixdiagonal m
ji
ji
nn
ij
H&B A-5
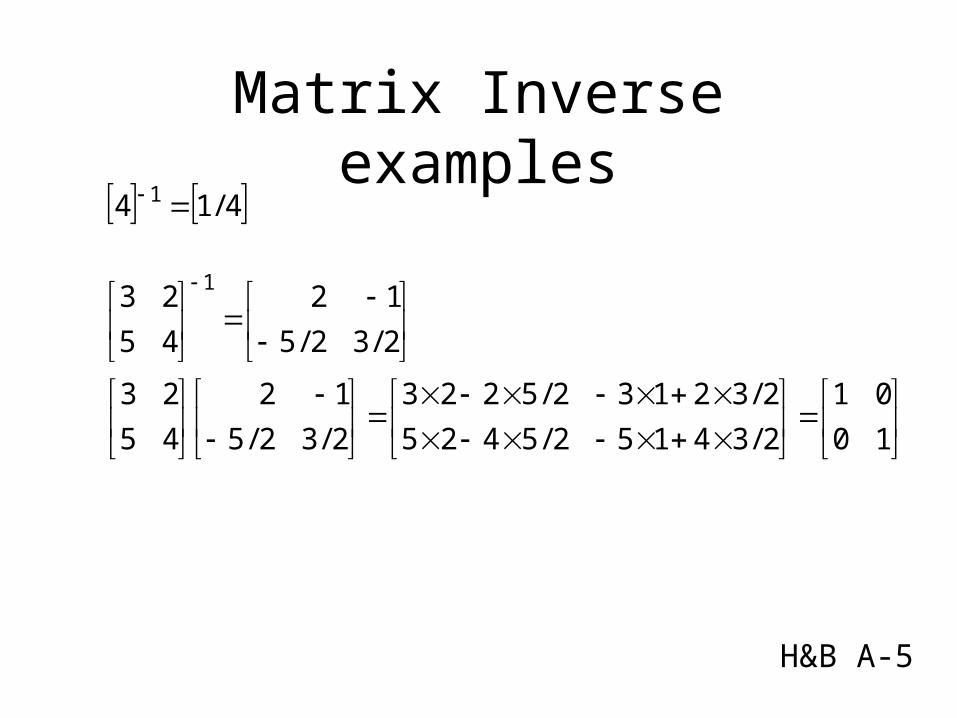
Matrix Inverse examples 4/14 1
2/32/5
12
45
231
10
01
2/34152/5425
2/32132/5223
2/32/5
12
45
23
H&B A-5
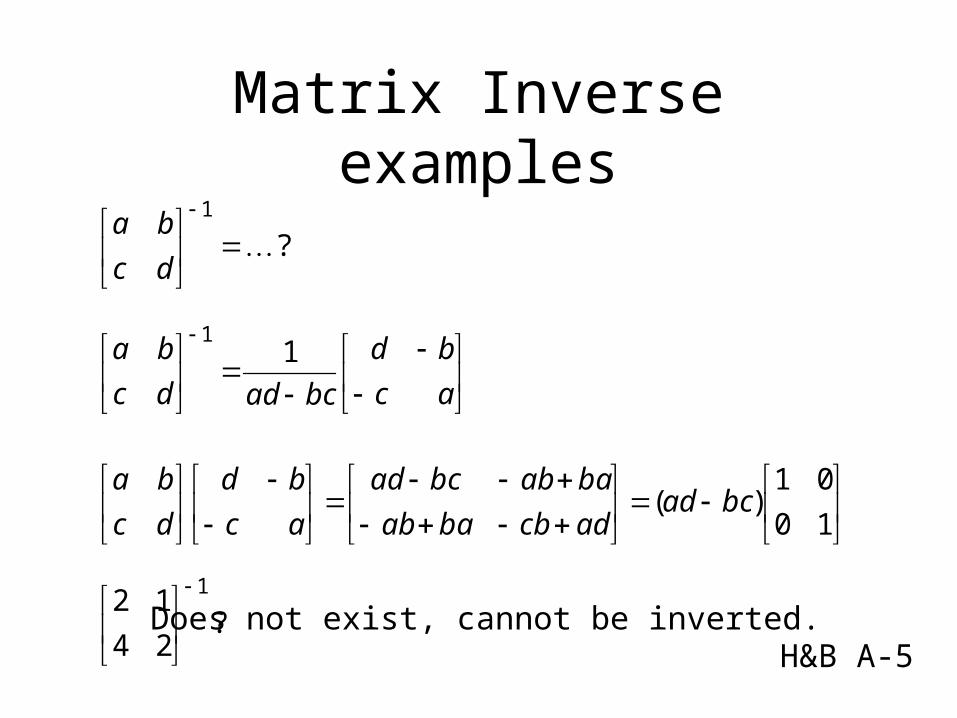
Matrix Inverse examples
?1
dc
ba
ac
bd
bcaddc
ba 11
10
01)( bcad
adcbbaab
baabbcad
ac
bd
dc
ba
?24
121
Does not exist, cannot be inverted.
H&B A-5
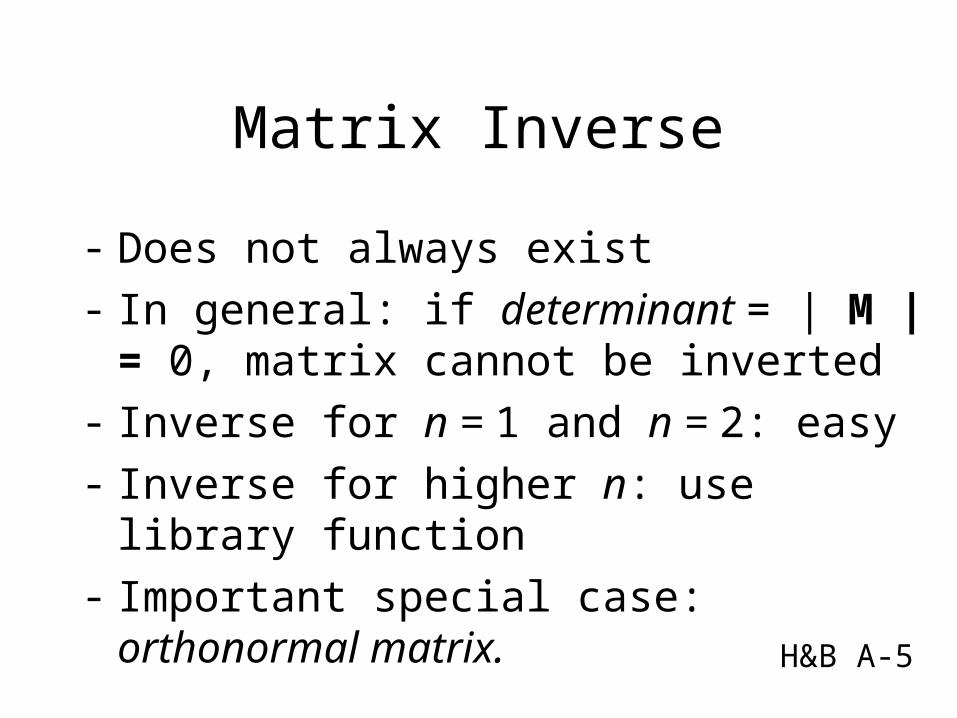
Matrix Inverse
- Does not always exist
- In general: if determinant = | M | = 0, matrix cannot be inverted
- Inverse for n = 1 and n = 2: easy
- Inverse for higher n: use library function
- Important special case: orthonormal matrix.
Overview
• Coordinates, points, vectors– definitions, operations, examples
• Matrices– definitions, operations, examples