268-276

of 9
-
Upload
sameera-srivathsa -
Category
Documents
-
view
221 -
download
0
Transcript of 268-276
-
8/4/2019 268-276
1/9
268 Journal of Marine Science and Technology, Vol. 18, No. 2, pp. 268-276 (2010)
DYNAMIC CHARACTERISTICS FOR
MAGNETO-HYDRODYNAMIC WIDE SLIDER
BEARINGS WITH AN EXPONENTIAL FILM
PROFILE
Jaw-Ren Lin* and Rong-Fang Lu*
Key words: magneto-hydrodynamic characteristics,exponential film,
slider bearings, stiffness coefficients, damping coeffi-
cients.
ABSTRACT
On the basis of the magneto-hydrodynamic (MHD) thin-
film lubrication theory, the dynamic characteristics of wide
exponential-shaped slider bearings with an electrically con-
ducting fluid in the presence of a transverse magnetic field are
theoretically investigated. Taking into account the transient
squeezing motion, the MHD dynamic Reynolds-type equation
is derived from the continuity equation and the MHD motion
equations. A closed-form solution for the steady film pressure
and load-carrying capacity and the dynamic stiffness and
damping coefficients are obtained. From the results obtained,
the presence of externally applied magnetic fields signifies an
enhancement in the film pressure. On the whole, the applied
magnetic-field effects characterized by the Hartmann number
provide a significant increase in values of the load-carrying
capacity, the stiffness coefficient and the damping coeffi-
cient as compared to the non-conducting-lubricant (NCL)
case. These improvements of bearing dynamics are more pro-
nounced with increasing Hartmann numbers and decreasing
minimum film thicknesses. To illustrate the use of the presentstudy, a design example is guided. For engineering application,
numerical results are further provided in the Tables.
I. INTRODUCTION
Slider bearings are often designed to support the axial-
component thrust of a rotating shaft. Traditionally, studies of
slider bearings with various film shapes focus upon the
mechanism lubricated with a non-conducting viscous fluid,
such as the studies by Pinkus and Sternlicht [13],Fuller [1],
Williams [21], Hamrock [2], Taylor and Dowson [20], Lin and
Hung [8] and Lin et al. [9]. Further analyses have been pre-
sented considering the temperature variation of fluid film by
Rodkiewicz and Anar [14] and considering the thermal effects
by Talmage and Carpino [19]. To prevent undesirable viscos-
ity change with temperature, the use of an electrically con-
ducting liquid-metal fluid in the presence of externally applied
magnetic fields has been emphasized. These kinds of lubri-
cants possess the high thermal-conductivity and high electri-
cal-conductivity features. Consequently, the heat source gen-
erating from the bearings can be readily conducted away. More-
over, the flow of an electrically conducting liquid-metal fluid
across an externally applied magnetic field will induce an
electrical-field intensity and result in a current density, a Lor-
entz force is then produced acting upon the fluid film. As a
result, the bearing characteristics are therefore improved.
Many authors have investigated the magneto-hydrodynamic
(MHD) performance of bearings lubricated with an electri-
cally conducting fluid in the presence of externally magnetic
fields. A representatively experimental and theoretical re-
search is observed in the MHD hydrostatic bearings by Maki
and Kuzma [11]. Further theoretical studies are found in the
MHD squeeze-film bearings by Shukla [16], Lin et al. [10]
and Hsu et al. [2]; the MHD journal bearings by Kuzma [6],Kamiyama [5] and Malik and Singh [12]; and the MHD slider
bearings by Snyder [18], Hughes [4], Rodkiewicz and Anwar
[15] and Lin [8]. However, the studies of MHD slider bearings
[18, 4, 15, 7] are limited to the steady characteristics in which
the transient squeezing effects are neglected. Recently, Lin
and Hung [9] have analyzed the dynamic characteristics for a
wide exponential film-shaped slider bearing under the
non-conducting-lubricant (NCL) case. To provide more in-
formation for bearing designing and selection, we are moti-
vated to investigate the MHD dynamic characteristics of ex-
ponential film-shaped slider bearings.
On the basis of the MHD thin-film lubrication theory, the
dynamic characteristics of a wide exponential-shaped slider bear-
ing with an electrically conducting fluid in the presence of a
transverse magnetic field are theoretically investigated. Tak-
Paper submitted 10/03/08; revised 06/06/09; accepted 06/08/09. Author for
correspondence: Jaw-Ren Li (e-mail: [email protected]; [email protected]).
*Department of Mechanical Engineering, Nanya Institute of Technology, P. O.
Box 324-22-59, Jhongli, Taiwan, R.O.C.
-
8/4/2019 268-276
2/9
J.-R. Lin and R.-F. Lu: Dynamic Characteristics for MHD Wide Slider Bearings with an Exponential Film Profile 269
ing account of the transient squeezing motion, the MHD dy-
namic Reynolds-type equation is derived from the continuity
equation and the MHD momentum equations. A closed-formsolution for the pressure is derived and applied to evaluate the
MHD bearing characteristics. Comparing with the NCL case,
the MHD characteristics (including the load capacity, the
stiffness coefficient and the damping coefficient) are presented
for different values of the Hartmann number, the profile pa-
rameter and the minimum film thickness.
II. ANALYSIS
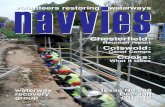
Figure 1 shows the physical geometry of a wide slider
bearing of lengthL. The bearing has a sliding velocity Uand a
squeezing velocityh/tin thexdirection and thezdirection
respectively, in which the exponential-film thickness is de-
scribed by:
( , ) ( ) exp( ln )mx
h x t h t r L
= (1)
In the equation, hm(t) denotes the minimum film thickness
at the outlet and r = h1(t)/hm(t) = [d + hm(t)]/hm(t) is the
inlet-outlet film ratio, where d is the shoulder height repre-
senting the difference between inlet height and outlet height.
The lubricant is taken to be an incompressible isothermal
electrically-conducting fluid with electrical conductivity .An externally uniform transverse magnetic fieldB0 is appliedin thezdirection. It is assumed that the thin-film lubrication
theory by Pinkus and Sternlicht [13] and Hamrock [2] is ap-
plicable, but the Lorentz force is considered, the induced
magnetic field is negligible as compared to the applied mag-
netic field. Under these assumptions, the continuity equation
and the MHD momentum equations in thex- andz-directions
are given by
0u w
x z
+ = (2)
2
0 02( )y
p uB E uB
x z
= + (3)
0p
z
= (4)
The no-slip boundary conditions at the bearing surfaces are:
u = U, w = 0 at z = 0 (5)
u = 0, w = h/t at z = h (6)
Solving (3) together with the boundary conditions, the x-
component velocity is obtained.
L
U
x
z
h hm
h1
B0
h___
t
Fig. 1. Physical geometry of a wide slider bearing with an exponent
tial-film profile lubricated with an electrically conducting fluid.
0 0 0
cosh coth sinhm m m
M M M u U z h z
h h h
=
2
002
my
h pB E
xM
0 0 0
cosh tanh 0.5 sinh 1m m m
M M M z h z
h h h
(7)
where hm0 denotes the steady minimum film thickness at the
exit andMrepresents the Hartmann number defined by
( )1/ 2
0 0/mM B h = (8)
In the present study, the bearing surfaces are assumed to be
perfect insulators and there is no external circuit to the fluid,
the electric field is then approximated by requiring the netcurrent flow to be zero.
( )00
0h
yz
B u E dz=
+ = (9)
Combining the two equations (7) and (9), the expression of
u is re-written as:
0 0
0
sinh( / ) sinh[ ( ) / ]1
2 sinh( / )
m m
m
Mz h M h z hUu
Mh h
=
2
0 0 0 0
0
sinh( / ) sinh( / ) sinh[ ( ) / ]2 cosh( / ) 1
m m m m
m
h h Mh h Mz h M h z hpM x Mh h
(10)
-
8/4/2019 268-276
3/9
270 Journal of Marine Science and Technology, Vol. 18, No. 2 (2010)
Integrate the continuity equation (2) with respect toz across
the film thickness.
0 0
h h
z z
u wdz dz
x z= =
=
(11)
Performing the integration together with the boundary con-
ditions (5) and (6), the MHD dynamic Reynolds-type equation
is derived.
( , ) 6 12p h h
A h M U x x x t
= +
(12)
where
2
0 20 0
( , ) 6 coth(0.5 ) 2mm m
h Mh MhA h M h
h hM
=
(13)
Expressed in a non-dimensional form, the non-dimensional
MHD dynamic Reynolds-type equation is written as:
* * ** *
* * * *( , ) 6 12
p h hA h M
x x x t
= +
(14)
where
** * * *
2
6( , ) coth(0.5 ) 2
hA h M Mh Mh
M = (15)
( )* * * * * *( , ) ( ) exp lnmh x t h t x r = (16)
Since the linear dynamic characteristics are evaluated for
the bearing operating under small disturbances about its steady
state, we assume that
* * *
( ) 1 ( ),mh t t= + 1
-
8/4/2019 268-276
4/9
J.-R. Lin and R.-F. Lu: Dynamic Characteristics for MHD Wide Slider Bearings with an Exponential Film Profile 271
where FA and FC are evaluated from the following double
integrals.
( )
( )
*
* * *
* *1 1
* * * * * *
* *0 0 0( ) ( , )
,
x e
A m A mx x x
h xF h f x h dx dx dx
A h M
= = == =
(26a)
( )
*
* * *
1 1* * * * * *
* *0 0 0
1( ) ( , )
,
x
C m C mx x x
F h f x h dx dx dxA h M
= = == =
(26b)
III. MHD STEADY AND DYNAMIC
CHARACTERISTICSBy letting the minimum film height be constant and the
squeezing velocity be zero, both of the steady film pressure
and the steady load-carrying capacity are evaluated from (20)
and (25), respectively.
( ) ( )* * * * * *0 1 00 006 ( , ) ( , )m A m C mp h f x h c f x h = + (27)
( ) ( ) ( ) ( ){ }* * * * *0 1 00 00 01 6 ( ) ( )m A m A mW F h F h c F h = = + (28)
where the subscript 0 denotes the steady state. The linear dy-
namic stiffness coefficient can be obtained by evaluating the
partial derivative of film force with respect to the minimum
film thickness, and then taking the value under steady state.
( ) ( )*
* *
* *0 00 0
6 6 Ac A mm m
FFS F h
h h
= = +
( ) ( )1 1* *000 0
CC
m m
FcF c
h h
+
(29)
Where
*
* *
* *1
* *
* *2 * *0 00 0
( , )
xeA
x xm m
hF Adx dx
h A h M h
= =
=
(30a)
*
* *
*1
* *
* *2 * *0 00 0
1
( , )
xC
x xm m
F Adx dx
h A h M h
= =
=
(30b)
1
*
0m
c
h
=
* 111 1 12 * *
1 0 0
6[( ) ]
CMAMCM AM m AM
CM m m
fff f h f
f h h
+
(30c)
*
* * *1
*1
* *2 * *0
( )
( , )
eAM
x
m m
h xf Adx
h A M h h
=
=
(30d)
*
*1
*1
* *2 * *0
1
( , )
CM
xm m
f Adx
h A M h h
=
=
(30e)
*** * 2 *2 2 *
* 2
34 coth(0.5 ) csc (0.5 ) 4e
m
hAMh Mh M h h Mh
h M
=
(30f)
Similarly, the linear dynamic damping coefficient can be
obtained by evaluating the partial derivative of film force withrespect to the squeezing velocity, and then taking the value
under steady state.
( )( )
( )
( )( )
*1* 0
* 0 010 0
12
ln 1
AM
c B C
CM
fFD F F
fV
= =
+
(31)
The steady performance and the dynamic characteristics
involving the integrals can be numerically evaluated by the
method of Gaussian Quadrature.
IV. RESULTS AND DISCUSSION
By the definition in (8), the Hartmann number M charac-
terizes the influence of an externally applied magnetic field on
the MHD characteristics of bearings in the presence of an
electrically conducting fluid. When the value ofMis equal to
zero, the MHD dynamic Reynolds-type equation reduces to
the non-conducting-lubricant (NCL) case by Lin and Hung [8].
With the aid of (18), the profile parameter denotes the wedge
effect of an exponential-shaped slider bearing. In the present
analysis, MHD bearing characteristics are presented for the
profile parameter, the steady minimum film height and the
Hartmann number with the following values:
0.2 ~ 2.8, = *0 0.4 ~ 1,mh = 0 ~10.M =
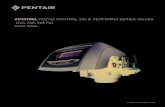
MHD Film Pressure. Figure 2 presents the non-dimensional
steady film pressure as a function of non-dimensional coor-
dinate for different values of the Hartmann number Munder
fixed values of the profile parameter and the steady minimum
film height. Comparing with the NCL case, the effects of the
applied magnetic field (M= 2) are observed to increase the
MHD steady film pressure. Further increments of the film
pressure are obtained with increasing values of the Hartmannnumber (M= 4, 6, 8, 10).
Figure 3 shows the non-dimensional steady maximum film
pressure as a function of the non-dimensional minimum film
-
8/4/2019 268-276
5/9
272 Journal of Marine Science and Technology, Vol. 18, No. 2 (2010)
x*
0.1
0.3
0.5
0.7
0.9
-1 -0.8 -0.6 -0.4 -0.2 0
0
0.2
0.4
0.6
0.8
1
NCL
M = 2
M = 4
M = 6
M = 8
M = 10
p0*
= 1, hm0* = 1
Fig. 2. MHD steady film pressure *
0p as a function ofx* for differentM
under = 1 and *m0
1.h =
1 0.9 0.8 0.7 0.6 0.5 0.4 0.3
0
0.4
0.8
1.2
1.6
2
2.4
NCL
M = 2
M = 6
M = 10
M = 4
M = 8
pM0
*
hm0*
= 1
Fig. 3. MHD steady maximum film pressure *M0p as a function of
*
m0h
for differentMunder = 1.
height for different values of the Hartmann number under
profile parameter = 1. It is observed that decreasing the
minimum film height increases the steady maximum film
pressure. Comparing with the NCL case, the effects of ex-
ternally magnetic fields provide higher values of the steady
maximum film pressure for the bearing with smaller film
heights and larger Hartmann numbers.
Figure 4 depicts the non-dimensional steady maximum film
pressure as a function of the profile parameter for different
0.1
0.3
0.5
0.7
0.9
0
0.2
0.4
0.6
0.8
1
NCL
M = 2
M = 6
M = 10
M = 4
M = 8
pM0
*
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
hm0* = 1
Fig. 4. MHD steady maximum film pressure *M0
p as a function of for
differentMunder *m0
1.h =
M
0.2
0.6
1
1.4
0 1 2 3 4 5 6 7 8 9 10
0
0.4
0.8
1.2
1.6hm0
* = 0.4
hm0* = 0.6
hm0* = 0.8
hm0* = 1.0
W0
*
= 1
Fig. 5. MHD steady load-carrying capacity *0W as a function ofM for
different *m0
h under = 1.
values ofM. Comparing with the NCL case, the effects of the
applied magnetic field (M= 2) for the bearing with an elec-
trically conducting fluid provide a higher maximum film pres-
sure. Moreover, larger increments are obtained for the bearing
with a larger profile parameter ( = 2.8) and a larger Hartmann
number (M= 10).
MHD Load Capacity. Figure 5 presents the non-dimensionalsteady load-carrying capacity as a function of the Hartmann
number for different values of the non-dimensional minimum
-
8/4/2019 268-276
6/9
J.-R. Lin and R.-F. Lu: Dynamic Characteristics for MHD Wide Slider Bearings with an Exponential Film Profile 273
0.1
0.3
0.5
0
0.2
0.4
0.6
NCL
M = 2
M = 4
M = 6
M = 8
M = 10
W0
*
0 0.2 0.4 0 .6 0.8 1 1.2 1.4 1.6 1 .8 2 2.2 2.4 2 .6 2.8 3
hm0* = 1
Fig. 6. MHD steady load-carrying capacity *
0W as a function of for
differentMunder *m0 1.h =
film height under profile parameter = 1. Since the effects of
applied magnetic fields result in a higher film pressure, the
integrated load-carrying capacity is similarly affected. In-
creasing the Hartmann number increases the load capacity. It
is also observed that the increments of load capacity for the
MHD bearing are more accentuated with a smaller squeezing
film height. Figure 6 shows the non-dimensional steady
load-carrying capacity with profile parameter for different val-
ues ofM. Comparing with the NCL case, the effects of the
applied magnetic field (M= 2) are observed to increase the
MHD load-carrying capacity. Further increments of the load-
carrying capacity are obtained with increasing values of the
Hartmann number (M= 4, 6, 8, 10).
MHD Stiffness Characteristics. Figure 7 presents the non-
dimensional stiffness coefficient as a function of the Hartmann
number M for different values of the non-dimensional mini-
mum film height under profile parameter = 1. Bearingstiffness coefficients are observed to increase slightly with
increasing Hartmann numbers. Decreasing the squeezing film
height increases the values of the stiffness coefficients. Totally,
the increments in values of the stiffness coefficients are more
pronounced for MHD bearings with a smaller squeezing-film
height and a larger Hartmann number. Figure 8 shows the
non-dimensional stiffness coefficient as a function of the pro-
file parameter for different values ofM. Under the NCL case,
bearing stiffness is observed to increase with until a critical
value is reached, and thereafter falls as the profile parameter
continues to increase. However, the effects of applied mag-
netic fields (M
= 2, 4, 6, 8, 10) shift the position of profileparameter to obtain the maximum stiffness coefficient at a
larger for MHD bearings. Comparing with the NCL bearing,
higher stiffness coefficients are obtained for the MHD bearing
M
0.5
1
1.5
2.5
3
3.5
4.5
5
5.5
0
2
4
6
hm0* = 1.0
hm0* = 0.8
hm0* = 0.4
hm0* = 0.6
Sc
*
0 1 2 3 4 5 6 7 8 9 10
= 1
Fig. 7. MHD dynamic stiffness coefficient *cS as a function ofM for
different *m0h under = 1.
0.1
0.3
0.5
0.7
0
0.2
0.4
0.6
NCL
M = 2
M = 4
M = 6
M = 8
M = 10
Sc*
hm0* = 1
0 0.2 0.4 0 .6 0.8 1 1.2 1.4 1.6 1.8 2 2.2 2.4 2.6 2.8 3
Fig. 8. MHD dynamic stiffness coefficient *cS as a function of for
differentMunder*
m01.h =
with the application of magnetic fields. Generally speaking,
the MHD bearing provides a significant improvement in dy-
namic stiffness characteristics, especially for a larger value of
the Hartmann number and the profile parameter.
MHD Damping Characteristics. Figure 9 presents the
non-dimensional damping coefficient as a function of the Hart-mann number Mfor different values of the non-dimensional
minimum film height under profile parameter = 1. Damping
coefficients are observed to increase with increasing values of
-
8/4/2019 268-276
7/9
274 Journal of Marine Science and Technology, Vol. 18, No. 2 (2010)
1
2
3
5
7
6
9
10
11
0
4
8
12
hm0* = 1.0
hm0* = 0.8
hm0* = 0.4
hm0* = 0.6
Dc
*
M
0 1 2 3 4 5 6 7 8 9 10
= 1
Fig. 9. MHD dynamic damping coefficient *cD as a function ofM for
different *m0
h under = 1.
the Hartmann numbers. Decreasing the squeezing film height
increases the values of the damping coefficients. It is observed
that the increments in values of the damping coefficients are
more pronounced for MHD bearings operating with smaller
squeezing-film heights and larger Hartmann numbers.
Figure 10 shows the non-dimensional damping coefficient
as a function of the profile parameter for different values of
M. Dynamic damping coefficients are observed to decrease
with increasing values of the profile parameter. Comparing
with the NCL case, the MHD bearing signifies an increase in
values of the damping coefficients by the externally applied
magnetic fields. On the whole, the effects of applied magnetic
fields on the dynamic damping characteristics are more pro-
nounced for the MHD bearing operating at a larger Hartmann
number and a smaller profile parameter.
Design Example and Comparison. To illustrate the use of
the present study for engineering application, a design exam-ple of the exponential-shaped slider bearing lubricated with an
electrically conducting fluid is guided in Table 1. From the
physical quantities given, the profile parameter and the Hart-
mann number are obtained:
= 0.5, 1.0, 1.5, 2.0, 2.5;
M= 0, 1.97, 3.94, 5.91, 7.88, 9.85
With the aid of (27), (28) and (30), the steady load-carrying
capacity and the dynamic stiffness and coefficients of the
MHD bearing are presented in Table 2.
It is useful to compare the present results with previouscontributions. If we neglect the effects of externally applied
magnetic fields, the dynamic characteristics of an exponen-
tial-shaped slider bearing under the NCL case by Lin and
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
NCLM = 2
M = 4
M = 6
M = 8
M = 10
Dc
*
hm0* = 1
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1 .8 2 2.2 2.4 2 .6 2.8 3
Fig. 10. MHD dynamic damping coefficient *cD with for different M
under *0
1.mh =
Table 1. Example of the exponential-shaped slider bear-
ings lubricated with an electrically conducting
fluid.
Exponential-shaped slider-bearing systemSteady minimum filmthickness
hm0 1.00 104m
Difference between theinlet and outlet filmthickness
d (0.5, 1.0, 1.5, 2.0, 2.5) 104m
Lubricant viscosity 1.55 103Pa s
Electrical conductivity 1.07 106mho/m
Magnetic field B0 0, 0.75, 1.5, 2.25, 3, 3.75 Wb/m2
Hung [8] are recovered. In Table 2, the NCL steady load-
carrying capacity and the dynamic stiffness and coefficients byLin and Hung [8] are also included for comparison. Slight
differences between the zero-M and NCL cases, depending
upon , are observed. This small division can be realized since
the printed values from the computer calculation by Lin and
Hung [8] (the NCL case) have been accurate to two decimal
points and the printed results of the present study (the zero-M
case) have been accurate to four decimal points.
V. CONCLUSIONS
Based upon the MHD thin-film lubrication theory, the dy-
namic characteristics of a wide exponential-shaped slider bear-
ing with an electrically conducting fluid in the presence of a
transverse magnetic field are theoretically analyzed. From the
results and discussion, conclusions can be drawn as follows.
-
8/4/2019 268-276
8/9
J.-R. Lin and R.-F. Lu: Dynamic Characteristics for MHD Wide Slider Bearings with an Exponential Film Profile 275
Table 2. MHD bearing characteristics *0 ,W * ,cS
*cD under
*0 1,mh = and comparison with the NCL case by Lin and
Hung [8].
--- NCL M= 0 M= 1.97 M= 3.94 M= 5.91 M= 7.88 M= 9.85
= 0.5 0.13 0.1320 0.1450 0.1784 0.2224 0.2711 0.3220
= 1.0 0.16 0.1622 0.1854 0.2399 0.3073 0.3797 0.4545
= 1.5 0.16 0.1644 0.1957 0.2638 0.3440 0.4288 0.5157
= 2.0 0.16 0.1582 0.1957 0.2725 0.3599 0.4513 0.5446
*0W
= 2.5 0.15 0.1496 0.1920 0.2742 0.3657 0.4606 0.5571
= 0.5 0.26 0.2639 0.2651 0.2768 0.3037 0.3419 0.3863
= 1.0 0.32 0.3244 0.3279 0.3539 0.4027 0.4640 0.5320
= 1.5 0.33 0.3289 0.3353 0.3750 0.4386 0.5134 0.5940
= 2.0 0.32 0.3164 0.3261 0.3769 0.4500 0.5325 0.6201
*cS
= 2.5 0.30 0.2992 0.3122 0.3714 0.4505 0.5375 0.6289
= 0.5 0.65 0.6509 0.7154 0.8799 1.0968 1.3373 1.5884
= 1.0 0.47 0.4681 0.5349 0.6922 0.8866 1.0957 1.3113
= 1.5 0.36 0.3589 0.4271 0.5758 0.7509 0.9360 1.1256
= 2.0 0.29 0.2880 0.3563 0.4960 0.6552 0.8216 0.9914
*cD
= 2.5 0.24 0.2389 0.3066 0.4378 0.5838 0.7353 0.8894
Taking into account the transient squeezing action, the
MHD dynamic Reynolds-type equation has been derived for
the study of a MHD exponential-shaped slider bearing. A
closed-form solution is obtained for the steady load capacity,
the stiffness coefficient and the damping coefficient. Com-
paring with the NCL case, the MHD exponential-shaped bear-ing provides an increase in the steady load and the dynamic
coefficients. On the whole, the effects of externally applied
magnetic fields on the steady load and the dynamic stiffness
coefficient are more pronounced with larger values of the
Hartmann number and the profile parameter and small values
of the minimum film thickness; but, the improvements of
dynamic damping characteristics are emphasized for bearings
designed at smaller profile parameters. To illustrate the use of
the present study, a design example is guided. Further results
are also provided in Tables for engineering application.
APPENDLX I: NOMENCLATURE
A,A* function defined in equation (12),
A*(h*,M) = 3 0( , ) / mA h M h
B, L width and length of the bearing
B0 applied magnetic field
d difference between the inlet and outlet film thickness
Dc,*
cD damping coefficient,* 3 3
0/c c mD D h L B=
Ey induced electric field in the y-direction
F, F* magneto-hydrodynamic film force,* 2 2 * * *
0/ ( , )m mF Fh UL B F h V = =
h film thickness, ( )( , ) ( ) exp / lnmh x t h t x L r =
*h non-dimensional film thickness,* * * * *
0/ ( ) ( )m m eh h h h t h x=
1h inlet film thickness, 1( ) ( )mh t d h t = +
*
eh non-dimensional function,
( )* * *( ) exp ln 1eh x x = +
,mh *
mh
minimum squeezing film thickness,* *
0( ) ( ) / m m mh t h t h=
0mh steady reference minimum film thickness at the exit
*
0mh non-dimensional steady reference minimum film
thickness, * *0 0( )m mh h=
M Hartmann number, ( )1/ 2
0 0mM B h =
p,p* film pressure, * 20 /mp ph UL=
*
0 0,p p steady film pressure,* 2
0 0 0 /mp p h UL=
r inlet-outlet film ratio, 1( ) / ( )mr h t h t = =
[ ( )] / ( ) 1m md h t h t + +
*,c cS S stiffness coefficient,
* 2 2
0/c c mS S h UL B=
t, t* time, * /t Ut L=
u, w velocity components in thex andz directions
U sliding velocity of the lower part
V* non-dimensional squeezing velocity, * * */mV dh dt =
W0,*
0W steady load-carrying capacity,
* 2 2
0 0 0/mW W h UL B=
x,y,z Cartesian coordinates
x* non-dimensional coordinate, * /x x L=
profile parameter, 0/ md h =
lubricant viscosity
electrical conductivity
-
8/4/2019 268-276
9/9
276 Journal of Marine Science and Technology, Vol. 18, No. 2 (2010)
Subscript
0 the steady state
REFERENCES
1. Fuller, D. D., Theory and Practice of Lubrication for Engineers, John Wiley
and Sons, New York (1984).
2. Hamrock, B. J., Fundamentals of Fluid Film Lubrication, McGraw-Hill
Inc., New York (1994).
3. Hsu, C. H., Lai, C., Hung, C. R., and Lin, J. R., Magneto-hydrodynamic
squeeze film characteristics between circular discs including rotational
effects, Proceedings IMechE, Part J: Journal of Engineering Tribolody,
Vol. 222, pp. 157-164 (2008).
4. Hughes, W. F., The magnetohydrodynamic finite step slider bearing,
Journal of Basic Engineering, Vol. 85, pp. 129-136 (1963).
5. Kamiyama, S., Magnetohydrodynamic journal bearing (Report 1),
Journal of Lubrication Technology, Vol. 91, pp. 380-386 (1969).6. Kuzma, D. C., The magnetohydrodynamic journal bearing, Journal of
Basic Engineering , Vol. 85, pp. 424-428 (1963).
7. Lin, J. R., Magnetohydrodynamic lubrication of finite slider bearings,
InternationalJournal of Applied Mechanics and Engineering, Vol. 7, pp.
1229-1246 (2002).
8. Lin, J. R. and Hung, C. R., Analysis of dynamic characteristics for wide
slider bearings with an exponential film profile, Journal of Marine
Science and Technology, Vol. 12, pp. 217-221 (2004).
9. Lin, J. R., Lu, R. F., and Yang, C. B., Linear stability analysis of a wide
inclined plane slider baring,Journal of Science and Technology, Vol. 10,
pp. 349-354 (2001).
10. Lu, R. F., Chien, R. D., and Lin, J. R., Effects of fluid inertia in
mageto-hydrodynamic annular squeeze films, Tribology International,
Vol. 39, pp. 221-226 (2006).
11. Maki, E. R. and Kuzma, D. C., Magnetohydrodynamic lubrication flowbetween parallel plates, Journal of Fluid Mechanics, Vol. 26, pp. 534-
543 (1966).
12. Malik, M. and Singh, D. V., Analysis of finite magnetohydrodynamic
journal bearings, Wear, Vol. 64, pp. 273-280 (1980).
13. Pinkus, O. and Sternlicht, B., Theory of Hydrodynamic Lubrication,
McGraw-Hill, New York (1961).
14. Rodkiewicz, C. M. and Anwar, M. I., Inertia and convective effect in
hydrodynamic lubrication of a slider bearing, ASME Journal of Lubri-
cation Technology, Vol. 93, pp. 313-315 (1971).
15. Rodkiewicz, C. M. and Anwar, M. I., Solution for MHD slider bearing
with arbitrary magnetic field,ASMEJournal of Lubrication Technology,
Vol. 94, pp. 288-290 (1972).
16. Shukla, J. B., Hydromagnetic theory for squeeze films,Joural of Basic
Engineering, Vol. 87, pp. 142-144 (1965).
17. Shukla, J. B., The optimum one-dimensional magnetohydrodynamicslider bearing, ASME Journal of Lubrication Technology, Vol. 92, pp.
530-534 (1970).
18. Snyder, W. T., The magnetohydrodynamic slider bearing, Journal of
Basic Engineering , Vol. 84, pp. 197-204 (1962).
19. Talmage, G. and Carpino, M., A pseudo spectral-finite difference
analysis of an infinitely wide slider bearing with thermal and inertia ef-
fects, STLE Tribology Transactions, Vol. 40, pp. 251-258 (1997).
20. Taylor, C. M. and Dowson, D., Turbulent lubrication theory - application
to design,ASME Journal of Lubrication Technology, Vol. 96, pp. 36-46
(1974).
21. Williams, J. A., Engineering Tribology, Oxford University Press Inc.,
New York (1994).