
23 and 24 Ego Motion Estimation
15
4 th Tensilica Day 23 st and 24 nd of September 2019 Ego Motion Estimation Christoph Heinrichs, Martin Köhler, Meinolf Blawat Dream Chip Technologies GmbH
Transcript of 23 and 24 Ego Motion Estimation

4th Tensilica Day23st and 24nd of September 2019
Ego Motion Estimation
Christoph Heinrichs, Martin Köhler, Meinolf Blawat
Dream Chip Technologies GmbH

Dream Chip Technologies GmbHConfidential – For Internal Use Only
Usage of Ego Motion Estimation: iFUSE Project
Input
DataiFusion
Processing
Sensor
Data 1
ProcessingSensor
Data 2
Processing
Sensor Data 2
Output
Data
Lidar
Radar
Camera
Video data pre processing: Stereo depth maps, …, monocular Ego-Motion calculation, …
iFUSE Project GoalAutonomous driving through a test crossroad.
Monocular ego motion calculation is used to enhance camera data confidence

SDIP SoC (Things2Do Project)
ARM A53 IVPTensilicaVP6

Overview – Ego Motion Estimation
ego motion
structure
motion
Structure from motion
motion
structure
Ground truth Reference model
Kitti dataset
Image t Image t+1

iFUSE Hardware Block-DiagramiFUSESensoren
Bosch
Radar
2x DCT
Atom
Kameras
Synchron. &
Preproc.
Radar
Synchron. & Preproc. Kamera
dSPACE AD PC (Ubuntu, ROS 1)
SfM,
Disparitäts-
schätzung
iFUSE
Low
Level
Fusion
Umfeld-/
Szenen-
modell
Situations-
analyse &
Handlungs-
planung
dSPACE Autobox (Matlab Simulink, Stateflow, Embedded Matlab, C)
iFUSE Fahrfunktion
Ibeo Lux
Laser-
scanner
Synchron. & Preproc.
Laser
Trajektorien-
planung
Längs/
Quer-
Regelung
Lenkung
Triebstrang
Bremse
3rd Party Sensoren
GenesysADMA DGPS
VW CAN-Bus
(ESP…)
wavebee
C2X
Ego Motion
Estimation
iFUSE Perzeptionssystem
Objektbildung
& Tracking
Gridmap &
Freiraumerk.
Lokalisierung/ SLAM
Licht
Demonstrator mit Aktoren

Ego Motion Estimation
• Reference Algorithm
• Evaluation of various egomotion algorithms
• ORB (Oriented FAST and Rotated BRIEF) feature extraction
• Optical flow added to enhance feature extraction
• Hierarchical decomposition of frames forscaling invariance of features
• Matching of extracted features in secutive frames
• Ego motion vector calculation using „feature matching vectors“
• Essential Matrix and create translation and rotation matrix
Feature detector
Image n Descriptors
Matching
Feature extration
Image n+1 Descriptors
create tranlation
and rotation matrix
3D ego-motion vector

FAST (Features from Accelerated Segment Test)
BRIEF (Binary Robust Independent Elementary Features)
Ego Motion Estimation
Brief 8b = 10010100
• Corner detector• Faster then Sift and Surf• Compare p with 16 pixel around
• If more then 12 grayscale values brighter corner• If more then 12 grayscale values darker corner
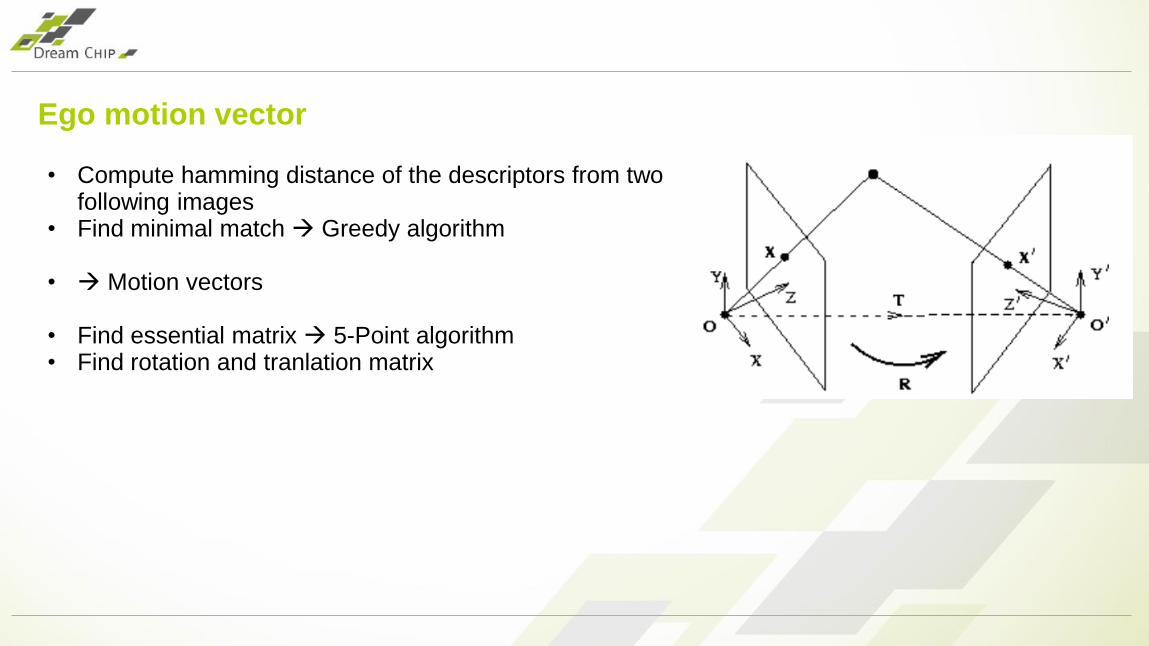
• Compute hamming distance of the descriptors from two following images
• Find minimal match Greedy algorithm
• Motion vectors
• Find essential matrix 5-Point algorithm• Find rotation and tranlation matrix
Ego motion vector

SDIP
TensilicaVision P6- L1:
512kB - L2: 2MB
TensilicaVision P6- L1:
512kB - L2: 2MB
TensilicaVision P6- L1:
512kB - L2: 2MB
TensilicaVision P6- L1:
512kB - L2: 2MB
Display -motionvectors
AtomOne
Memory(DDR)
MVDUVIU
ARM Cortex
A53
ARM Cortex
A53
ARM Cortex
A53
ARM Cortex
A53
SDIP SoC (Things2Do Project)
• VIU: Video input unit• MVDU: Multistream video display unit
• Arm Cortex A53
• Tesnilica Vision P6• Level 1 Cache, 2x 256kB• Level 2 Cache, 2x 1MB

Algorithm: Ego Motion Estimation
Tensilica VP6 Arm Cortex A53
Fast feature detector
Image nBRIEF 64B Descriptors
MatchingFAST
feature extration
Image n+1BRIEF 64B Descriptors
create tranlation
and rotation matrix
3D ego-motion vector
• XI Library:• FAST, BRIEF
• Vector types 512b width• 64x int 8b, 32x int 16b, 16x int 32b
• Instruction set for the Vision P6 to compute vector types• One descriptor can be stored in one vector register
(64B descritpor)• Only save matches to shared memory (DDR)

Store matches n-1
Load tilen+1
Compute tile n
FlexNoc
Tenilica Vision P6
L2 CacheBank 0: 1MBBank 1: 1MB
L1 CacheBank 0: 256kBBank 1: 256kB
Implementation on Tensilica Vision P6

Store matches n-1
Load tilen+1
Compute tile n
FlexNoc
Tenilica Vision P6
L2 CacheBank 0: 1MBBank 1: 1MB
L1 CacheBank 0: 256kBBank 1: 256kB
Implementation on Tensilica Vision P6
• Use the DMA • Use different banks to load/store and
process in parallel
Reduce executen time
• Load the tiles in the L1 Cache• Compute FAST and BRIEF• Store all descriptors of the image in the L2
Cache• Match the descriptors from the L2 Cache of
two following images • Store the matches in the DDR
Reduce load and store operations

Store matches n-1
Load tilen+1
Compute tile n
FlexNoc
Tenilica Vision P6
L2 CacheBank 0: 1MBBank 1: 1MB
L1 CacheBank 0: 256kBBank 1: 256kB
Implementation on Tensilica Vision P6
• Split the image in three regions• One region is computed on one core• One Core is for the synchronisation
• No data dependences between the cores• Every image only loaded once

Ego Motion Estimation
• Interfaces
• Input: Mono Grayscale Image, 30fps
• Output: Ego motion vectors
• C model using OpenCV
• Target platform
• SDIP SoC (Things2Do Project)
• ADAS - High performance platform
• 4x Tensilica VP6, 4x Arm Cortex A53















![Active learning for on-road vehicle detection: a comparative …swiftlet.ucsd.edu/publications/2011/sivaraman_mva_2011.pdfS. Sivaraman, M. M. Trivedi tracking [28,30], ego motion estimation](https://static.fdocuments.in/doc/165x107/5ffc92c3e9d60a7eea34c270/active-learning-for-on-road-vehicle-detection-a-comparative-s-sivaraman-m-m.jpg)


