
2010 KU INTERNATIONAL SUMMER PROGRAM Office of International Programs Konkuk University.
date post
19-Dec-2015Category
view
215download
0
2. Representation of Spatial Objects
Ki-Joon HanDepartment of Computer Science
& Engineering
Konkuk UniversityE-mail : [email protected]
URL : http://db.konkuk.ac.kr

DATABASE LAB. KONKUK UNIVERSITY 2
Introduction
This chapter Various ways of modeling and representing geometric and topological
information in GIS Euclidean space
The space of interest Rd (d=2), together with the Euclidean distance
Points Elements of the Euclidean space A pair of (Cartesian) coordinates (x,y)
Map projection A conversion to map geographic entities on a glove (hence a curved
surface) onto a planar representation Embedded space(or search space)
Region of R2 that contains the relevant objects and is bounded A sufficiently large rectangle whose edges are parallel to the axes of the
coordinate system
DATABASE LAB. KONKUK UNIVERSITY 3
2.1 Geographic Space Modeling2.1.1 Entity-Based Models (1/6)
Geographic object(≈ entity or feature)(1) Description
(2) Spatial component(≈ spatial object or spatial extent) shape and location of the object – “a set of points”
Entire set (identity, spatial object, and common description)
Interpretation of space Depends on the semantics associated with the geographic territory E.g., territory of France
(1) Administrative point of view : several administrative units
(2) Geologist view point : geologic areas
(3) Traffic control view point : road network => choose a new interpretation of space and define a new collection of entities(theme) describing this space

DATABASE LAB. KONKUK UNIVERSITY 4
2.1.1 Entity-Based Models (2/6) Types of spatial objects(1) Zero-dimensional objects or points
for representing the location of entities whose shape is not considered The area which is quite small with respect to the embedding space size E.g., cities, churches, crossings
(2) one-dimensional objects or linear objects for representing networks (roads, hydrography, and so on) Polyline
A finite set of line segments or edges, such that each segment endpoint is shared by exactly two segments
① Closed : two extreme points are identical② Simple : no pairs of nonconsecutive edges intersect at any points③ Monotone with respect to L : every line L’ orthogonal to L meets the polyline a
t one point at most

DATABASE LAB. KONKUK UNIVERSITY 5
2.1.1 Entity-Based Models (3/6)
(a) line segment(edge) (b) polyline (c) non-simple polyline
(d) simple closed polyline (f) non-monotone polyline(e) monotone polyline
Figure 2.1 Examples of 1D objects

DATABASE LAB. KONKUK UNIVERSITY 6
2.1.1 Entity-Based Models (4/6)(3) two-dimensional objects or surface objects
for representing entities with large areas, such as parcel or administrative units Polygon
A region of the plane bounded by a closed polyline, called its boundary① Simple : its boundary is a simple polyline② Convex : for any pair of points A and B in P the segment AB is fully included in
P③ Monotone : a simple polygon such that its boundary δP can be split into exact
ly two monotone polyline MC1 and MC2
Region A set of polygons E.g., a country and its islands
DATABASE LAB. KONKUK UNIVERSITY 7
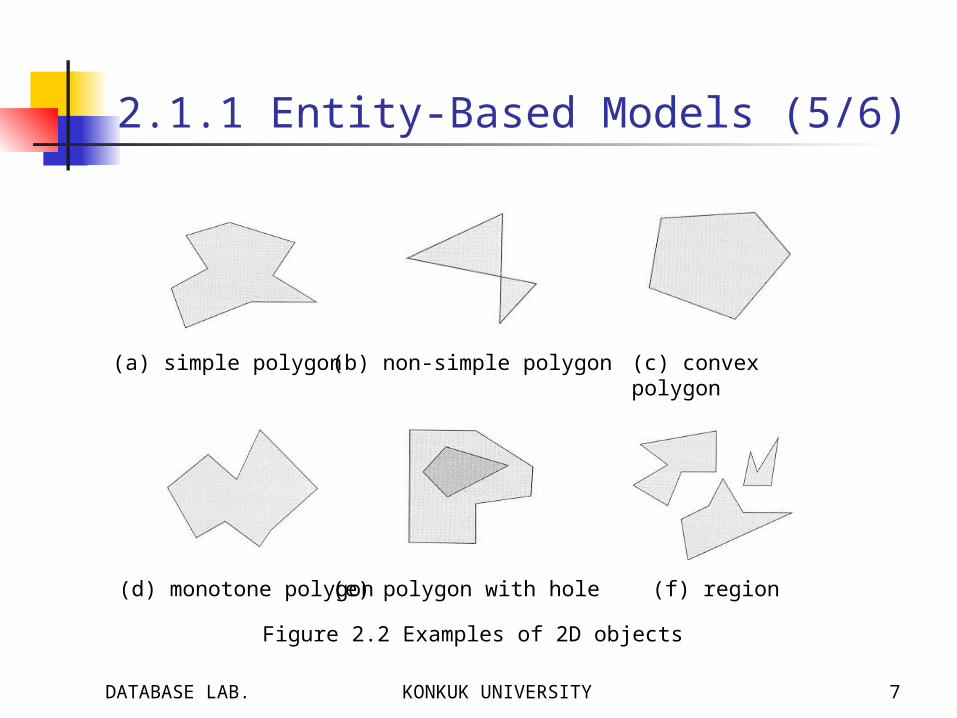
2.1.1 Entity-Based Models (5/6)
(a) simple polygon (b) non-simple polygon (c) convex polygon
(d) monotone polygon (f) region(e) polygon with hole
Figure 2.2 Examples of 2D objects

DATABASE LAB. KONKUK UNIVERSITY 8
2.1.1 Entity-Based Models (6/6) Two remarks(1) The choice of geometric types is arbitrary
It depends on the future use of the collection of entities E.g., airport (scale of interest)① Point : if interested in air links② Area : if interested in the inner organization of the airport
(2) The description of linear and surfacic objects is based on line segments
We use only a linear approximation of entities in stead of higher-order polynomials in x and y
① Simplifies the design of spatial databases② Leads to efficient ways of modeling and querying spatial information Faithful approximation ≈ # of segments ≈ memory space
DATABASE LAB. KONKUK UNIVERSITY 9
2.1.2 Field-Based Models Each point in space
Associated one or several attribute values(e.g., precipitation, temperature, and pollution), defined as continuous functions in x and y
E.g., altitude above sea level An example of function defined over x and y, whose result is the
value of a variable h for any point in the 2D space
Comparison(1) Field-based models
View space as a continuous field
(2) Entity-based models Identify a set of points (region, line) as an entity or object
DATABASE LAB. KONKUK UNIVERSITY 10
2.2 Representation Modes Representation of infinite point sets of the Euclidean space(1) Tessellation mode
By approximating the continuous space by a discrete one E.g., city
A set of cells that cover the city’s interior
(2) Vector mode and half-plane representation By constructing appropriate data structures E.g., city
A list of points describing the boundary of a polygon

DATABASE LAB. KONKUK UNIVERSITY 11
2.2.1 Tessellation (1/5) Tessellation mode(discrete model, spatial resolution model, tiling,
meshes) Decomposition of the plane(grid or raster) into disjoint cells(1) Fixed(regular) tessellation mode
Use polygonal units of equal size
(a) grid squares (square cells) (b) hexagonal cells
Figure 2.3 Regular tessellations
DATABASE LAB. KONKUK UNIVERSITY 12
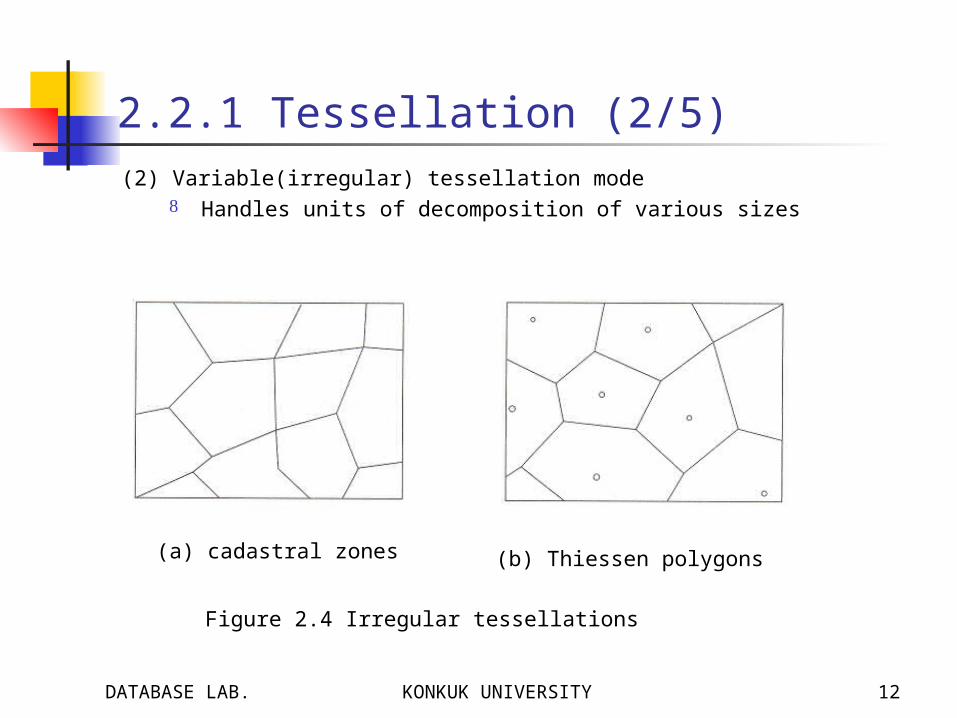
2.2.1 Tessellation (2/5)(2) Variable(irregular) tessellation mode
Handles units of decomposition of various sizes
(a) cadastral zones (b) Thiessen polygons
Figure 2.4 Irregular tessellations

DATABASE LAB. KONKUK UNIVERSITY 13
2.2.1 Tessellation (3/5) Raster representation
The rectangular 2D space is partitioned into a finite number of elementary cells (NxM) (i.e., rectangular cell ≈ pixels)
A pixel has an address in the space, (x,y) where x≤ N, y≤ M
Field-based data in tessellation mode represented as a function from space
(1) Regular tessellation In applications that process image data coming from remote sensing (satellite ima
ge), such as weather or pollution forecast Domain : a finite set of pixels, as a discrete one Range : temperature or elevation
(2) Irregular tessellation In zoning (a typical GIS function) in social, demographic, or economic data Surface modeling using triangles or administrative and political units
DATABASE LAB. KONKUK UNIVERSITY 14
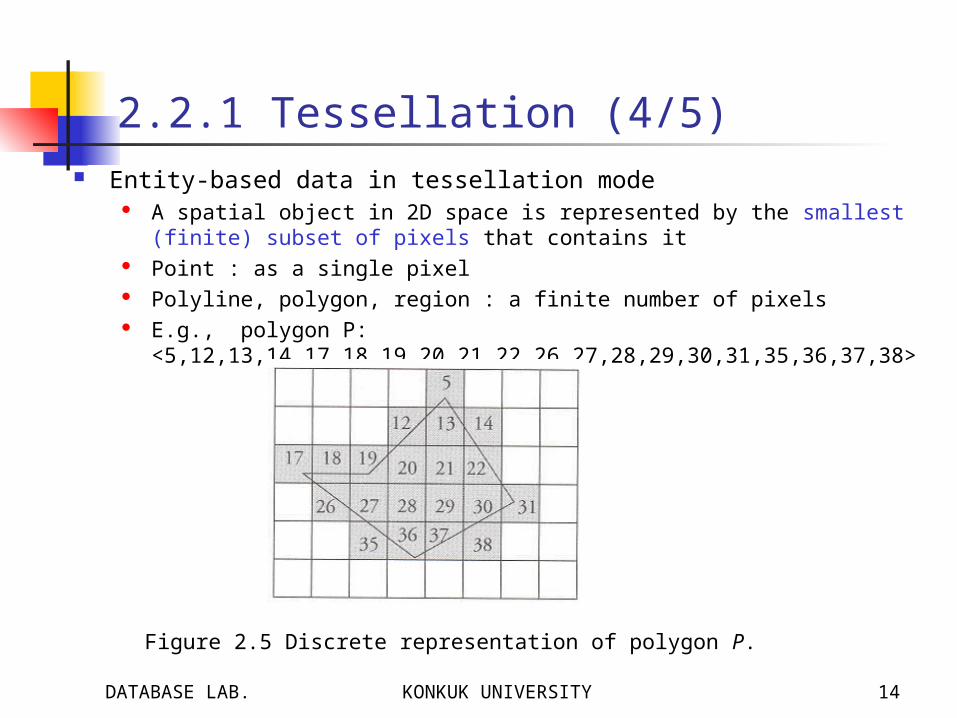
2.2.1 Tessellation (4/5) Entity-based data in tessellation mode
A spatial object in 2D space is represented by the smallest (finite) subset of pixels that contains it
Point : as a single pixel Polyline, polygon, region : a finite number of pixels E.g., polygon P:
<5,12,13,14,17,18,19,20,21,22,26,27,28,29,30,31,35,36,37,38>
Figure 2.5 Discrete representation of polygon P.

DATABASE LAB. KONKUK UNIVERSITY 15
2.2.1 Tessellation (5/5) Tessellation mode
Approximate a spatial object by a finite number of cells Faithful object representation
Occupy much memory space and operate more time consuming

DATABASE LAB. KONKUK UNIVERSITY 16
2.2.2 Vector Mode (1/6) Objects
Constructed from points and edges as primitives (less memory)(1) Point : represented by its pair of coordinates(2) Linear and surface objects : represented by structures(lists, sets, arrays)
on the point representation(3) Polygon : represented by the finite set of its vertices
Entity-based data in vector mode Polyline
Represented by a list of points <p1, …,pn>, each pi being a vertex Polygon
Represented as a list of points Closed polyline, i.e., (pn,p1) : edge of the polygon
Region Represented as a set of polygons

DATABASE LAB. KONKUK UNIVERSITY 17
2.2.2 Vector Mode (2/6) Structure notation
[ ] : tuple < >: list { } : set
point : [x:real, y:real] polyline : <point> polygon : <point> region : {polygon}
E.g., polygon P <[4,4],[6,1],[3,0],[0,2],[2,2]>
Figure 2.6 Vector representation of polygon P

DATABASE LAB. KONKUK UNIVERSITY 18
2.2.2 Vector Mode (3/6) E.g., polylines (“vertex notation”)
L1 = <1,2,3> L2 = <4,5,6,7,8,9,10,11,12> : non-simple L3 = {<13,14,19>,<15,16,19>,<17,18,19>} : a set of polylines
(a) L1 (b) L2 (c) L3
Figure 2.7 Examples of polylines

DATABASE LAB. KONKUK UNIVERSITY 19
2.2.2 Vector Mode (4/6) E.g., surfacic objects (polygons and regions)
R1 = {<5,6,12,10,11>,<6,7,8,9,10,12>} : P2 and P3
R2 = {<13,14,15,16>} : P4
R3 = {<1,2,3,4>} : P1
=> concise representation compared to the rater mode
Figure 2.8 Examples of polygons

DATABASE LAB. KONKUK UNIVERSITY 20
2.2.2 Vector Mode (5/6) No way to distinguish
A simple polygon from a non-simple one A convex polygon from a nonconvex one A polygon from a polyline A set of adjacent polygons from a set of disjoint or intersecting ones
Field-based data in vector mode Digital Elevation Models (DEMs)
A digital (and thereby finite) representation of an abstract modeling of space
for any natural phenomenon that is a continuous function of the 2D space (temperature, pressure, moisture, or slope)
Based on a finite collection of sample values (not all points in 2D space)=> Values at other points are obtained by interpolation (e.g., TIN)

DATABASE LAB. KONKUK UNIVERSITY 21
2.2.2 Vector Mode (6/6) TIN (Triangulated Irregular Networks)
Based on a triangular partition of 2D space The elevation value is recorded at each vertex, and inferred at any other
point P by linear interpolation of the three vertices of the triangle that contains P
(a) point sample (b) triangulation (c) TIN
Figure 2.9 Progression of a triangulated irregular network (TIN)

DATABASE LAB. KONKUK UNIVERSITY 22
2.2.3 Half-Plane Representation (1/4) Spatial objects
Defined with a single primitive; namely, half-planes H: half-space in the d-dimensional space RRd
The set of points P(x1,x2,…,xd) that satisfy a1x1+a2x2+…+adxd +ad+1 ≤ 0 P: convex d-dimensional polytope
The intersection of some finite number of closed half-spaces Face of P
H ∩ P, where H is part of the half-spaces defining P Q : d-dimensional polyhedron in RRd
The union of a finite number of polytopes Not necessarily convex Divide the space into its interior, its boundary, and its exterior Its components are not necessarily connected and may overlap

DATABASE LAB. KONKUK UNIVERSITY 23
2.2.3 Half-Plane Representation (2/4) Convex polygon with n edges (n vertices)
The intersection of n half-planes delimited by lines Region
A union of convex polygons Line segment
The intersection of two half-lines or rays Polyline
The union of some number of line segments Point
A zero-dimensional polytope A set of points
A zero-dimensional polyhedron
=> regions, polylines, and points : polyhedra of respective dimensions 2, 1, and 0.
DATABASE LAB. KONKUK UNIVERSITY 24
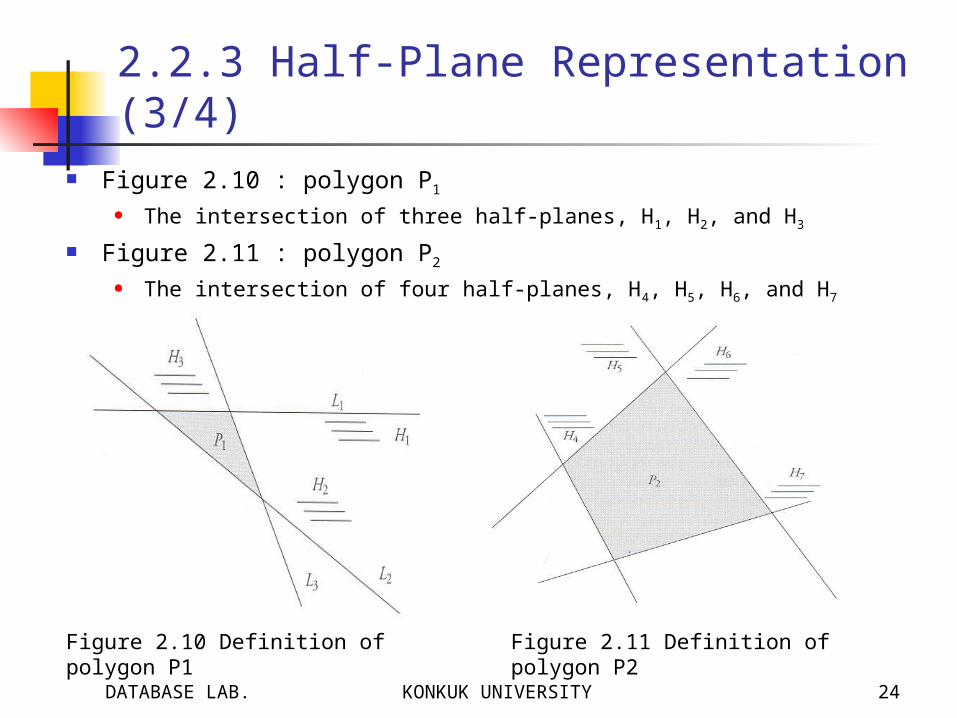
2.2.3 Half-Plane Representation (3/4) Figure 2.10 : polygon P1
The intersection of three half-planes, H1, H2, and H3
Figure 2.11 : polygon P2
The intersection of four half-planes, H4, H5, H6, and H7
Figure 2.10 Definition of polygon P1
Figure 2.11 Definition of polygon P2
DATABASE LAB. KONKUK UNIVERSITY 25
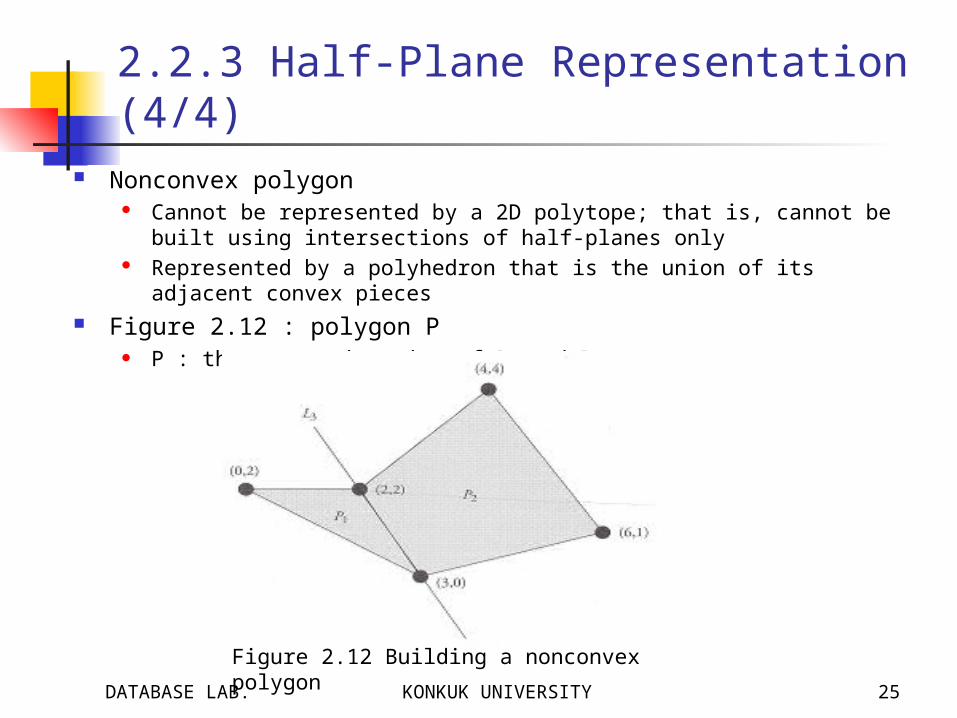
2.2.3 Half-Plane Representation (4/4) Nonconvex polygon
Cannot be represented by a 2D polytope; that is, cannot be built using intersections of half-planes only
Represented by a polyhedron that is the union of its adjacent convex pieces
Figure 2.12 : polygon P P : the geometric union of P1 and P2
Figure 2.12 Building a nonconvex polygon
DATABASE LAB. KONKUK UNIVERSITY 26
2.3 Representing the Geometry of a Collection of Objects
Three representations of collections of spatial objects(1) Spaghetti model(2) Network model differ in the expression of topological
relationships(3) Topological model
Topological relationships Relations that are invariant under topological transformations Preserved when the spatial objects are translated, rotated, or scaled in
the Euclidean plane Adjacent, overlapping, disjointness, and inclusion => helpful for query evaluation

DATABASE LAB. KONKUK UNIVERSITY 27
2.3.1 Spaghetti Model Spaghetti Model
The geometry of any spatial object of the collection is described independently of other objects
No topology is stored, and all topological relationships must be computed on demand
Enable the heterogeneous representation that would mix points, polylines, and regions with no restrictions
Advantage Simplicity Easy input of new objects into the collection
Drawback Lack of explicit information about the topological relationships Some representation redundancy (boundary of two adjacent regions)
Tend to large data Risk of inconsistency

DATABASE LAB. KONKUK UNIVERSITY 28
2.3.2 Network Model (1/3) Network model
for representing networks in network (graph)-based applications such as transportation services or utility management (electricity, telephone, and so on)
Topological relationships among points and polylines are stored Two new concepts(1) Node
A distinguished point that connects a list of arcs -> line connectivity(2) Arc
A polyline that starts at a node and ends at a node
Two types of points (1) Node
Either an arc endpoint(extreme) or an isolated point in the plane
(2) Regular point Other line and polygon vertices
DATABASE LAB. KONKUK UNIVERSITY 29
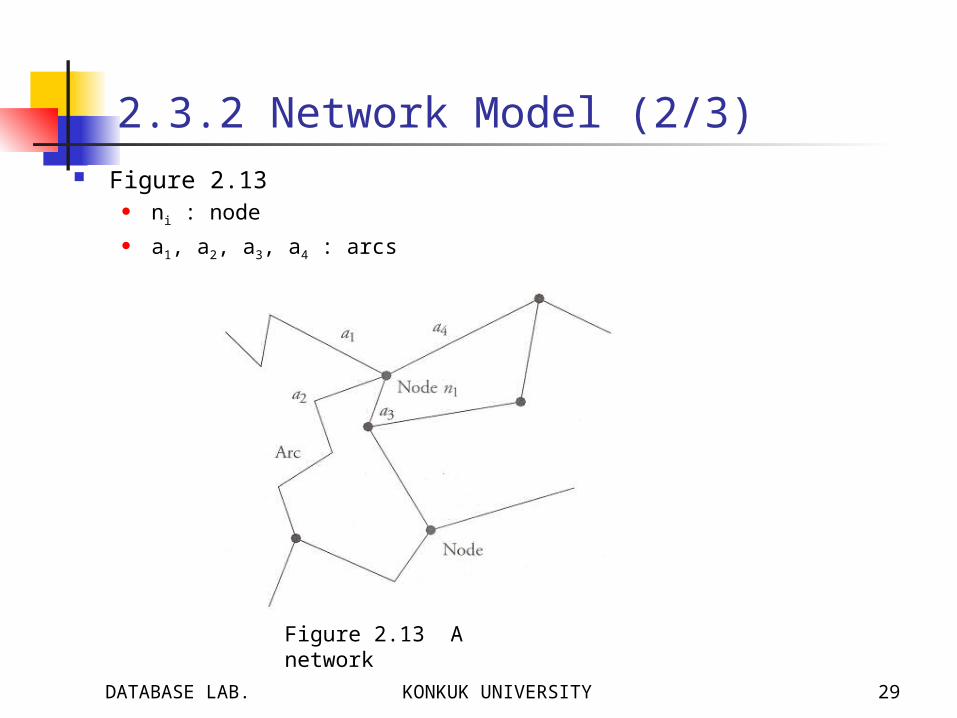
2.3.2 Network Model (2/3) Figure 2.13
ni : node a1, a2, a3, a4 : arcs
Figure 2.13 A network

DATABASE LAB. KONKUK UNIVERSITY 30
2.3.2 Network Model (3/3) Network types (1) planar network
Each edge intersection is recorded as a node even though the node does not correspond to a geographic object (i.e., entity in real world)
(2) nonplanar network Edges may cross without producing an intersection E.g., ground transportation with tunnels and passes
Objects in the network model point : [x:real, y:real] node : [point, <arc>] arc: [node-start, node-end, <point>] polygon: <point> region : {polygon}=> No information on the relationships between 2D objects is
stored
DATABASE LAB. KONKUK UNIVERSITY 31
2.3.3 Topological Model (1/3) Topological Model
Similar to the network model, except that the network is planar Include a planar subdivision into adjacent polygons
Objects in the topological model point : [x:real, y:real] node : [point, <arc>] arc: [node-start, node-end, left-poly, right-poly, <point>] polygon: <arc> region : {polygon} Each arc is shared with a neighbor polygon (no redundancy,
because each point/line is stored only once)

DATABASE LAB. KONKUK UNIVERSITY 32
2.3.3 Topological Model (2/3) E.g., Figure 2.14
P1 : <a, b, f> P2 : <c, d, e, f> N1 : [[3, 0], <a, f, e>] f : [N1, N2, P1, P2, <>]
Figure 2.14 Representation of polygons in the topological model

DATABASE LAB. KONKUK UNIVERSITY 33
2.3.3 Topological Model (3/3) Advantage
The efficient computation of topological queries Easy consistency maintenance and updates
Drawback Some spatial objects may have no semantics in a real-world application (∵ planar) The complexity of the resulting structure may slow down some
operations (e.g., input of a new object)

DATABASE LAB. KONKUK UNIVERSITY 34
2.4 Spatial Data Formats and Exchange Standard
Standard types (1) de facto (in fact) standard : 사실 표준
So dominant that everybody seems to follow it like an authorized standard
E.g., mile
(2) de jure (by law) standard : 공식 표준 Standard authorized by standardization organization such as ISO E.g., meter
DXF format As a data transfer format between CAD software data and become a
popular GIS data format Comparison criterion between spatial data formats
The richness of their underlying spatial model
DATABASE LAB. KONKUK UNIVERSITY 35
2.4.1 Overview of Current Spatial Data Formats (1/2)
Official organization (1) National Institutes of standards
ANSI (American National Standards Institute) AFNOR (Association Française de Normalisation) BSI (British Standard Institute)
(2) International Organization ISO (International Organization for Standardization) DCWIG (Digital Geographic Information Working Group)
de facto standards DXF : for CAD/CAM applications (from AutoCAD) DIGEST : for military applications within many NATO countries (by
DCWIG) SDTS : used by many U.S. national agencies (by USGS)

DATABASE LAB. KONKUK UNIVERSITY 36
2.4.1 Overview of Current Spatial Data Formats (2/2)
Proprietary formats France : EDIGéO format (by AFNOR) Germany : ALK/ATKIS format Switzerland : INTERLIS format United kingdom : NTF format Canada : SAIF format Korea : NGI format
=> allow the description and transfer of raster and vector data => OGC’s GML Standards for discrete (raster) representation
GIF (Graphics Interchange Format) JPEG (Joint Photographic Experts Group) TIFF (Tagged Image File Format) : most widely used for spatial data CGM (Computer Graphic Metafile) ASRP (Arc Standard Raster Product)

DATABASE LAB. KONKUK UNIVERSITY 37
2.4.2 The TIGER/Line Data Format (1/7)
TIGER (Topologically Integrated Geographic Encoding and Referencing)
The name for the system and digital database developed at the U.S. Census Bureau
A practical implementation of the topological data model
TIGER/Line file A database of geographic entities such as roads, railroads, rivers, lakes,
political boundaries, and census statistical boundaries Contains the location in latitude and longitude, the name, the type of
feature (≈object), address ranges for most streets, geographic relationships to other features, and other related information
Topological structure of the TIGER database Define the location and relationships of streets, rivers, railroads, and other
features to each other and to the numerous geographic entities Designed to ensure no duplications of these features and areas
DATABASE LAB. KONKUK UNIVERSITY 38
2.4.2 The TIGER/Line Data Format (2/7)
Spatial objects Belong to the Geometry and Topology (GT) class of SDTS Embody both geometry (coordinate locations and shape) and topology All spatial objects are mixed in a single layer that includes roads,
hydrography, railroads, boundary lines, and miscellaneous features Introduce many spatial objects that do not correspond to geographic
objects
DATABASE LAB. KONKUK UNIVERSITY 39
2.4.2 The TIGER/Line Data Format (3/7)
Spatial object types (1) Node
0-D object that is a topological junction of two or more links or chains, or an endpoint of a link or chain
(2) Entity point A point used for identifying the location of point features such as
towers, buildings, or places
(3) Chain (≈arc) A simple polyline described by a start node, an end node, and a list of
intermediate points called shape points Intersect each other only at nodes① Complete chain
Explicitly references left and right polygons and start and end nodes
② Network chain Do not reference left and right polygons (above network model)
(4) GT-polygon An area described by the list of complete chains that form its boundary

DATABASE LAB. KONKUK UNIVERSITY 40
2.4.2 The TIGER/Line Data Format (4/7)
An example of TIGER object GT-polygon : 3 Polygon interior point : for computing distances
Figure 2.15 TIGER objects (after TIGER documentation)

DATABASE LAB. KONKUK UNIVERSITY 41
2.4.2 The TIGER/Line Data Format (5/7)
Extracting the representation of spatial objects from the TIGER files (1) Record type 1
TLID(TIGER/Line ID), and its start and end nodes
(2) Record type 2 The shape points of the chains up to 10 points
Table 2.1 Examples of record type 1 (chains)
Table 2.2 Examples of record type 2 (shape points)

DATABASE LAB. KONKUK UNIVERSITY 42
2.4.2 The TIGER/Line Data Format (6/7)
Construction of GT-polygons (1) Record type I
Give the identifiers of the left and right polygons (CENID, POLYID)
(2) Record type 7 Contains all landmarks, together with their point coordinates and some descriptive
attributes
Table 2.3 Examples of record type I (link chains/polygons)
Table 2.4 Examples of record type 7 (landmarks)

DATABASE LAB. KONKUK UNIVERSITY 43
2.4.2 The TIGER/Line Data Format (7/7)
Major types of features (1) Line features
Roads Railroads Hydrography Transportation features, power lines, and pipelines Boundaries
(2) Landmark features Point landmarks (e.g., schools and churches) Area landmarks (e.g., parks and cemeteries) Office buildings and factories
(3) Polygon features Census statistical areas School districts Voting districts Administrative divisions: states, counties, county subdivisions Blocks

DATABASE LAB. KONKUK UNIVERSITY 44
2.4.3 Recent Standardization Initiatives (1/5)
Standardization of exchange formats and spatial data models for improving interoperability between GISs
OpenGIS Consortium (OGC) Created in 1994 to foster communication among GISs in order to ensure interopera
bility Dedicated to the creation and management of an industry-wide architecture for inter
operable geoprocessing
Technical goals of OGC (1) a universal spatio-temporal data and process model : OGC data model
Main entity : feature which has a type and a geometry
(2) a specification for each of the major database languages to implement the OGC data model
(3) a specification for each of the major distributed computing environments (DCEs) to implement the OGC process model

DATABASE LAB. KONKUK UNIVERSITY 45
2.4.3 Recent Standardization Initiatives (2/5)
OGC’s technical activities (1) the development of an abstract specification
Create and document a conceptual model sufficient to allow for the creation of implementation specifications
① Essential model Establish the conceptual linkage of the software to the real world
② Abstract model Define the eventual software system in an implementation-neutral
manner
(2) the development of an implementation specification Technical specifications implementing the abstract requirements :
CORBA, DCOM, Java
(3) the specification revision process => formalism for all models : UML
DATABASE LAB. KONKUK UNIVERSITY 46
2.4.3 Recent Standardization Initiatives (3/5)
ISO Technical Committee 211 (TC/211) : Geographic Information/Geomatics
Global standardization issues related GIS Preparing a family of geographic information standards in cooperation
with other ISO technical committees Study the standards to specify methods, tools, and services for data
management and transfer between different users, systems, and locations
Groups of TC/211 committee Working group 1 : Framework and reference model Working group 2 : Geospatial data models and operators Working group 3 : Geospatial data administration Working group 4 : Geospatial services Working group 5 : Profiles and functional standards
=> since 1997, OGC and ISO seek to converge toward a common solution
(i.e., interoperability in geospatial data processing)

DATABASE LAB. KONKUK UNIVERSITY 47
2.4.3 Recent Standardization Initiatives (4/5)
Open Geospatial Datastore Interface (OGDI) To offer a solution that leverages and accelerates standardization efforts API that resides between an application and various geodata products in
order to provide standardized geospatial access methods A client/server architecture for delivering spatial data over the Internet To implement a simple feature interface for Java in OGDI as soon as
OpenGIS issues the specifications
Geodata integration needs of OGDI The distribution of geodata products via the Internet/Intranet Access to data in native format The adjustment of coordinate systems and cartographic projections The retrieval of geometric and alphanumeric data
DATABASE LAB. KONKUK UNIVERSITY 48
2.4.3 Recent Standardization Initiatives (5/5)
Current map server Usually transfer GIF, JPEG, etc. Use HTTP, which is based on a stateless connection
OGDI server Use GLPT (Geographic Library Transfer Protocol)
new Internet protocol for the transfer of geospatial data A statefull replacement for HTTP


















![Konkuk International Winter Program Jan 4 · Field Trip KRW 400,000 Upon Registration Tuition KRW 0 Waived [Students whose parents are Konkuk University Alumni] Payments Amount Deadline](https://static.fdocuments.in/doc/165x107/5f9a65472ddeb973d844ab1f/konkuk-international-winter-program-jan-4-field-trip-krw-400000-upon-registration.jpg)