2-DIMENSIONAL KASAI VELOCITY ESTIMATION FOR DOPPLER OPTICAL COHERENCE TOMOGRAPHY
1
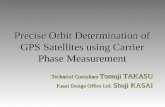
2-DIMENSIONAL KASAI VELOCITY ESTIMATION FOR DOPPLER OPTICAL COHERENCE TOMOGRAPHY Darren Morofke a,b,c , Michael C. Kolios a,b , Victor X.D. Yang b,d a Dept. of Electrical Engineering, Ryerson University, Toronto, Canada, b Dept. of Physics, Ryerson University, Toronto, Canada, c Dept. of Engineering Science, University of Oxford, United Kingdom, d Imaging Research, Sunnybrook Health Sciences Center, Toronto, Canada, • Velocity detection using current generation Doppler Optical Coherence Tomography (DOCT) is limited to a few mm/s • Two dimensional approach was applied using the previous method which we call the Transverse Kasai (TK) along with the Axial Kasai (AK) for increased velocity detection • Increased the non-aliased flow range from the mm/s range to the m/s range • Axial Kasai is able to increase the dynamic range of unaliased velocity estimate by ~375x • Combining the AK/TK in a 3-zone system, we can cover a dynamic range from µm/s to m/s • The AK been demonstrated to show results in vivo on the aortic flow of a rat aorta b) 500 µm Introduction Left: Experimental Phantom Setup Right: Velocity as obtained from detecting a change in frequency (Doppler shift) The TK estimates a change in phase between two adjacent points in time at the same spatial location and averages over a given amount of axial (M) and transverse (N) lines. The TK estimate can be used directly in the above equation. Results Summary Future Work • AK for spectroscopic OCT • Implementation of the AK on swept source OCT systems • Improvement of phase stability to bridge Zone I and Zone III [email protected] V s θ 2 cos o D t f v n Two Dimensional Approach Left: TK - Calculating phase difference between Right: AK - Calculating phase difference between transversely adjacent points (red arrows) and axially adjacent points (red arrows) and averaging results in a box containing M=N=4 averaging results in a box containing M=N=4 (blue box) (blue box) The AK estimates a change in phase between two spatially adjacent points at the same time and averages over a given amount of axial (M) and transverse (N) lines. The AK estimate is the mean backscattered carrier frequency which must have a baseline subtraction for flow visualization. A) M-Mode image showing a Doppler shift of 350 kHz in a flow phantom Tube B) Axial Kasai velocity estimates from measurements at two different Doppler angles, corrected for the refractive index of the Intralipid. C) Velocity profile of a phantom experiment. Squares are the average of 20 A- scans. Red line is a parabolic fit of the data. SNR analysis. Standard deviation divided by the mean averaged over 8000 a- scans with varying window size in transverse (N) or axial (M) which correspond to the X and Y axis respectively. Note that for a result of 0.05 the minimum occurs when N=M=32, or a spatial area of 1024 pixels The results from a current 1D velocity estimation technique, the TK, are shown below corresponding to Zone I. With phase unwrapping these results can be extended into Zone II. Zone III can be estimated properly via the AK mapping extending the dynamic range up to a peak of 57 cm/s. Left: Zone I and II from the TK estimate Right: the graph scale is increase to show the large increase in estimation due to the AK A) Structural M-Mode image of backscattered light intensity for a very high-flow rate - note that the signal is vanishing from the center of the tube due to the signal being outside of the bandwidth of the system. B) AK on high speed flow - note that the AK fails as the structural image disappears. The maximum frequency detected is 1.6 Mhz which agrees with the calculated bandwidth of the system. The bandwidth of the system used was +/-1.6 MHz. To test if the AK was able to estimate velocities up to this range, a high-speed phantom was setup. The results show that the AK is able to estimate a frequency shift up to the maximum bandwidth of the system as shown in the M-Mode image below corresponding to a maximum resolvable velocity of 1.5 m/s before the filter degrades the signal. Publications about AK D. Morofke, M. C. Kolios, I. A. Vitkin, and V. X. D. Yang, “Wide dynamic range detection of bi-directional flow in doppler oct using 2-dimensional kasai estimator,” Optics Letters 32, p. 253- 255, 2007. Results(continue d)
description
2-DIMENSIONAL KASAI VELOCITY ESTIMATION FOR DOPPLER OPTICAL COHERENCE TOMOGRAPHY. Darren Morofke a,b,c , Michael C. Kolios a,b , Victor X.D. Yang b,d - PowerPoint PPT Presentation
Transcript of 2-DIMENSIONAL KASAI VELOCITY ESTIMATION FOR DOPPLER OPTICAL COHERENCE TOMOGRAPHY

2-DIMENSIONAL KASAI VELOCITY ESTIMATION FOR DOPPLER OPTICAL COHERENCE TOMOGRAPHY
Darren Morofkea,b,c, Michael C. Koliosa,b, Victor X.D. Yangb,d
aDept. of Electrical Engineering, Ryerson University, Toronto, Canada, bDept. of Physics, Ryerson University, Toronto, Canada, cDept. of Engineering Science, University of Oxford, United Kingdom, dImaging Research, Sunnybrook Health Sciences Center, Toronto, Canada,
• Velocity detection using current generation Doppler Optical Coherence Tomography (DOCT) is limited to a few mm/s
• Two dimensional approach was applied using the previous method which we call the Transverse Kasai (TK) along with the Axial Kasai (AK) for increased velocity detection
• Increased the non-aliased flow range from the mm/s range to the m/s range
• Axial Kasai is able to increase the dynamic range of unaliased velocity estimate by ~375x
• Combining the AK/TK in a 3-zone system, we can cover a dynamic range from µm/s to m/s
• The AK been demonstrated to show results in vivo on the aortic flow of a rat aorta
b) 500 µm
Introduction
Left: Experimental Phantom Setup Right: Velocity as obtained from detecting a change in frequency (Doppler shift)
The TK estimates a change in phase between two adjacent points in time at the same spatial location and averages over a given amount of axial (M) and transverse (N) lines. The TK estimate can be used directly in the above equation.
Results
Summary
Future Work• AK for spectroscopic OCT• Implementation of the AK on swept source OCT
systems• Improvement of phase stability to bridge Zone I
and Zone III
Vs
θ
2 coso D
t
fv
n
Two Dimensional Approach
Left: TK - Calculating phase difference between Right: AK - Calculating phase difference betweentransversely adjacent points (red arrows) and axially adjacent points (red arrows) and averaging results in a box containing M=N=4 averaging results in a box containing M=N=4 (blue box) (blue box)
The AK estimates a change in phase between two spatially adjacent points at the same time and averages over a given amount of axial (M) and transverse (N) lines. The AK estimate is the mean backscattered carrier frequency which must have a baseline subtraction for flow visualization.
A) M-Mode image showing a Doppler shift of 350 kHz in a flow phantom Tube B) Axial Kasai velocity estimates from measurements at two different Doppler angles, corrected for the refractive index of the Intralipid. C) Velocity profile of a phantom experiment. Squares are the average of 20 A-scans. Red line is a parabolic fit of the data.
SNR analysis. Standard deviation divided by the mean averaged over 8000 a-scans with varying window size in transverse (N) or axial (M) which correspond to the X and Y axis respectively. Note that for a result of 0.05 the minimum occurs when N=M=32, or a spatial area of 1024 pixels
The results from a current 1D velocity estimation technique, the TK, are shown below corresponding to Zone I. With phase unwrapping these results can be extended into Zone II. Zone III can be estimated properly via the AK mapping extending the dynamic range up to a peak of 57 cm/s.
Left: Zone I and II from the TK estimate Right: the graph scale is increase to show the large increase in estimation due to the AK
A) Structural M-Mode image of backscattered light intensity for a very high-flow rate - note that the signal is vanishing from the center of the tube due to the signal being outside of the bandwidth of the system. B) AK on high speed flow - note that the AK fails as the structural image disappears. The maximum frequency detected is 1.6 Mhz which agrees with the calculated bandwidth of the system.
The bandwidth of the system used was +/-1.6 MHz. To test if the AK was able to estimate velocities up to this range, a high-speed phantom was setup. The results show that the AK is able to estimate a frequency shift up to the maximum bandwidth of the system as shown in the M-Mode image below corresponding to a maximum resolvable velocity of 1.5 m/s before the filter degrades the signal.
Publications about AKD. Morofke, M. C. Kolios, I. A. Vitkin, and V. X. D. Yang, “Wide dynamic range detection of bi-directional flow in doppler oct using 2-dimensional kasai estimator,” Optics Letters 32, p. 253-255, 2007.
Results(continued)










![Phase-Resolved Doppler Optical Coherence Tomography · Optical coherence tomography (OCT) is an emerging medical imaging and diagnostic technology developed by MIT in the 1990s [1].](https://static.fdocuments.in/doc/165x107/5f56d7954ad77c29b92171cb/phase-resolved-doppler-optical-coherence-tomography-optical-coherence-tomography.jpg)