1997 Symmetry and ad-hoc methods for solving nonlinear ...
208
University of Wollongong Research Online University of Wollongong esis Collection University of Wollongong esis Collections 1997 Symmetry and ad-hoc methods for solving nonlinear partial differential equations Joanna Goard-Werakso University of Wollongong Research Online is the open access institutional repository for the University of Wollongong. For further information contact the UOW Library: [email protected] Recommended Citation Goard-Werakso, Joanna, Symmetry and ad-hoc methods for solving nonlinear partial differential equations, Doctor of Philosophy thesis, School of Mathematics and Applied Statistics, University of Wollongong, 1997. hp://ro.uow.edu.au/theses/2060
Transcript of 1997 Symmetry and ad-hoc methods for solving nonlinear ...

University of WollongongResearch Online
University of Wollongong Thesis Collection University of Wollongong Thesis Collections
1997
Symmetry and ad-hoc methods for solvingnonlinear partial differential equationsJoanna Goard-WeraksoUniversity of Wollongong
Research Online is the open access institutional repository for theUniversity of Wollongong. For further information contact the UOWLibrary: [email protected]
Recommended CitationGoard-Werakso, Joanna, Symmetry and ad-hoc methods for solving nonlinear partial differential equations, Doctor of Philosophythesis, School of Mathematics and Applied Statistics, University of Wollongong, 1997. http://ro.uow.edu.au/theses/2060


SYMMETRY AND AD-HOC METHODS FOR SOLVING NONLINEAR PARTIAL DIFFERENTIAL EQUATIONS
A thesis submitted in fulfilment ofthe
requirements for the award ofthe degree of
DOCTOR OF PHILOSOPHY
from
THE UNIVERSITY OF WOLLONGONG
by
Joanna Goard-Werakso, B.Math (HONS), Wollongong
SCHOOL OF MATHEMATICS AND APPLIED STATISTICS
1997

Declaration
This thesis is submitted to The University of Wollongong, N.S.W, and I declare that no
part of it has been submitted for a higher degree to any other University or Institution.
Joanna Goard-Werakso
-i -

Dedication
To my brother
Richard Werakso
7/11/56 - 9/8/97
-ii -

Acknowledgements
Without exaggeration, if it were not for my supervisor Professor Philip Broadbridge, I
would never have had the courage to embark on this doctorate mission. For making me sign
on the dotted line, for his continued faith in me, help, encouragement and seemingly endless
patience, 'Thankyou so very much'.
I consider myself very fortunate to have had many inspiring suggestions, not only from
my supervisor, but also from other leaders in the field of symmetries. I would like to thank
Dr Danny Arrigo for sharing with me his love of mathematics, as well as for the many
enlightening conversations. As well, I'd like to thank Professor William Ames for his genuine
interest and helpful advice.
I am extremely grateful to my family for their support over the past three years. Thank
you to my husband, father and late mother for their understanding and pride in my work.
But particular thanks go to my three terrific children, Carly, Karina and Deanne who have
had to survive with a part-time mum. I only hope that they too, in the future, will have the
opportunity to strive for their own personal goals.
I would also like to thank my girlfriends for their continual willingness to lend a hand.
I'm only sorry that the 'Werakso theorem', that Darinka so longed to see, will have to arrive
in the future.
Finally, I'd like to thank Mrs Paula McGregor, a wonderfully talented typist, for her
many hours of precise work. Thankyou for perservering!
-iii -

Abstract In this thesis, w e establish the range of applicability of Lie's classical symmetry method,
and various of its generalisations, in constmcting new exact solutions to topical nonlinear
partial differential equations, including reaction-diffusion equations, boundary layer equa
tions and the poorly understood degenerate nonlinear diffusion equations. In addition, some
established ad-hoc methods of nonlinear superposition and equation splitting are related to
properties of Lie symmetry algebras. These equation solving methods are thereby incorpo
rated in systematic symmetry-finding algorithms.
Lie symmetry analysis of degenerate diffusion equations, in which the diffusivity de
pends on both concentration and concentration gradient, uncovers an interesting class of
integrable equations. Using both linear transform methods and separation of variables, these
nonlinear equations are solved subject to initial and boundary conditions on both infinite and
finite domains. Solutions on the finite domain evolve towards a discontinuous jump. Also,
relevant exact solutions are constructed for nonintegrable models. These solutions include
the possibility of strong degeneracy with a step initial condition remaining discontinuous for
a finite time.
Every solution of a linear equation with constant coefficients is invariant under some
classical symmetry. Strictly nonclassical symmetries are rare for nonlinear diffusion equa
tions, a fact which is made evident by proving the equivalence of the nonclassical symmetry
determining equations to their classical counterparts. However, new nonclassical solutions
are constructed for 2+1-dimensional reaction-diffusion equations, including a case with an
Arrhenius reaction term. The higher order symmetry method of generalised conditional sym
metries is carried out on a class of degenerate diffusion equations with and without reaction
terms.
Recently discovered new solutions to the boundary layer equations are shown to follow
from classical symmetry reduction of a larger system of governing partial differential equa
tions (PDEs). This leads to a consideration ofthe classical method of equation splitting and
to the more general question of compatibility of differential constraints or side conditions. It
is shown that the construction of classically invariant explicit solutions can be obtained by
-iv -

splitting, even when the ordinary differential equation, obtained by symmetry reduction, is
intractable.
The simple observation that a nonlinear superposition principle (NLSP) is itself a sym
metry of a two-equation system, has led us to relate the method of superposition principles to
the structure of the Lie symmetry algebra of the PDE. In so doing, w e discover the full class
of second order P D E s of two independent variables with a Lie group of NLSPs. This result is
then used to solve two related fluid flow problems in scale heterogeneous unsaturated media.
- v -

Table of Contents
Declaration i
Dedication ii
Acknowledgements iii
Abstract iv
Table of Contents vi
List of Abbreviations used in this Thesis x
1. Introduction 1
1.1 Symmetries of Differential Equations 1
1.1.1 Lie's Classical Point Symmetries 2
1.1.2 Lie-Backlund Symmetries (or Generalised Symmetries) 4
1.1.3 Nonclassical Symmetries (or Conditional Symmetries) 5
1.1.4 Symmetry Reductions by the Direct Method 6
1.1.5 Generalised Conditional Symmetries 7
1.2 Structure of this Thesis 8
2. The Nonlinear Degenerate Diffusion Equation ut = -^-[f(u)g(ux)]
and its Extensions 10
2.1 Introduction 10
2.2 The Integrable Nonlinear Degenerate Diffusion Equation
ut = (/(u)^"1)^ and its Relatives 11
2.2.1 Background 11
2.2.2 Classical Lie Symmetry Analysis 13
2.2.3 Using the Method of Foursov and Vorob'ev 14
2.2.4 A Linearisable Class of Equations 16
2.2.5 Solution by the Sturm-Liouville Approach 21
2.2.6 Summary 25
- vi -

2.3 Degenerate Nonlinear Diffusion with an Initially Sharp Front 26
2.3.1 Background 26
2.3.2 A Step that is Discontinuous for a Finite Time 29
2.3.3 A Critically Nondegenerate Solution that is Discontinuous only at t = 0 . 33
2.3.4 Summary 38
2.4 An Extension of Equation (2.1) 38
2.4.1 Classical Lie Symmetry Analysis 38
2.4.2 A Linearisable Class of Equations 40
3. Methods of Conditional Symmetries 60
3.1 Introduction 60
3.2 Nonclassical Symmetry Analysis of Nonlinear Reaction-Diffusion Equations
in Two Spatial Dimensions 61
3.2.1 Background 61
3.2.2 Preliminary Simplifications 62
3.2.3 Nonclassical Symmetries 63
3.2.4 Symmetry Reductions 85
3.2.5 Some Similarity Solutions of Reaction-Diffusion Equations 90
3.3 Nonclassical Solutions are Rare for Nonlinear Diffusion 92
3.3.1 Background 92
3.3.2 The Case T ^ 0 93
3.3.3 The Case T = 0 108
3.4 Nonclassical Symmetry Analysis of a Class of Reaction-Diffusion Equations . . 110
3.5 Conditional Symmetries of a Class of Nonlinear Degenerate Diffusion Equations 112
3.5.1 Nonclassical Symmetry Analysis of (3.173) and (3.174) 113
3.5.2 Generalised Conditional Symmetry Analysis of (3.173) 113
3.5.3 Generalised Conditional Symmetry Analysis of (3.174) 119
3.5.4 Solutions to (3.173) and (3.174) 122
-vii -

4. Symmetry Methods for Ad-hoc Techniques 126
4.1 Introduction 126
4.2 Nonlinear Superposition Principles obtained by Lie Symmetry Methods . . . . 127
4.2.1 Background 127
4.2.2 Nonlinear Superpositions of the Form (4.1) which can be Embedded
in a Differentiable Manifold 128
4.2.2.1 A n Uncoupled Two-Equation-System Approach 129
4.2.2.2 A Scalar P D E Approach 131
4.2.2.3 Finding the Linearising Transformation Directly from the N L S P . . 144
4.2.3 Nonlinear Superpositions of the Form (4.1) which Cannot be
Embedded in a Manifold 146
4.2.4 Cross Superpositions 148
4.2.5 A Practical Application - Fluid Flow in Unsaturated Media 152
4.2.5.1 Steady Scale Heterogeneous Flow in Porous Media 152
4.2.5.2 Models Solvable by Elementary Means 155
4.2.5.3 Drying of a Heterogeneous Soil Between two Distant Water Bodies . 157
4.2.5.4 Unsaturated Flow in Heterogeneous Soil Between Horizontal Plates 159
4.2.6 Summary 162
4.3 Symmetry Methods for Equation Splitting 163
4.3.1 Background 163
4.3.2 Additional Symmetries for a Larger System of Equations 166
4.3.3 C o m m o n Symmetries for a Larger System of Equations 174
4.3.4 A Use of Nonclassical Symmetries in Equation Splitting 177
5. Conclusion 180
Appendices
1 183
2 184
- viii -

3 186
Publications Associated with this Thesis 188
Bibliography 189
-ix-

List of the Abbreviations used in this Thesis
D E differential equation
G C S generalised conditional symmetry
iff if and only if
ISC invariant surface condition
N L S P nonlinear superposition principle
O D E ordinary differential equation
P D E partial differential equation
- x -

Chapter 1
Introduction
Many of the basic laws of physical, biological and social sciences are translated into
the language of differential equations (DEs), the study of which constitutes a major field of
mathematics. Once a differential equation has been formulated, one is usually concerned
with obtaining solutions, whether they be numerical, asymptotic or exact analytical.
The technique for finding exact solutions of the widest variety of differential equations
comes from Lie group analysis of differential equations and its generalisations, initiated by
Sophus Lie over 100 years ago. The research in this thesis lies primarily in this area of
mathematics.
Even though Lie's algorithm and its generalisations have been the subject of much
research over the past century, our understanding of their usefulness is far from complete.
W e know, for example, that they can be used to find exact solutions to new differential
equations which may emerge, but our present understanding of the roles they can play in
finding solutions and establishing theorems on when they can be used in conjunction with
certain ad-hoc techniques, is very limited.
The overall aims of this thesis are to constmct new solutions to important, though
poorly understood, classes of nonlinear partial differential equations, to compare the range
of applicability of various classical and nonclassical symmetry methods, and to place various
ad-hoc methods on the firmer foundations of classical Lie symmetry theory. W e begin by
providing the conceptual background to this thesis.
1.1 Symmetries of Differential Equations
A symmetry of a differential equation is a transformation mapping any solution to
another solution of the differential equation. The classical Lie groups of point invariance
transformations depend on continuous parameters and act on the system's graph space that is

Introduction 2
co-ordinatised by the independent and dependent variables. As these symmetries can be
determined by an explicit computational algorithm (known as Lie's algorithm or Lie's classical
method), many automated computer algebra packages (see e.g. [1], [2], [3]) have been
developed to find them. Thus they are the most extensively used of all symmetries.
If a partial differential equation (PDE) is invariant under a point symmetry, one can often
find similarity solutions or invariant solutions which are invariant under some subgroup of
the full group admitted by the PDE. These solutions result from solving a reduced equation
with fewer independent variables. Even when an explicit solution is not possible, reduction of
variables has a number of advantages. Firstly, for those nonlinear boundary value problems
compatible with the symmetries, a numerical solution would require a discretisation grid of
one fewer dimension. This results in a great reduction in computation time. Secondly, PDEs
in fewer variables tend to be more extensively studied. The known qualitative properties of
the reduced PDEs could be lifted to the original higher dimensional PDEs.
W e now briefly describe Lie's classical method and some generalisations of the method,
developed in the effort to find further symmetries leading to additional, new explicit solutions.
Space limitations prevent a full account being given here. The interested reader is referred to
the excellent detailed accounts in the textbooks (e.g. [23], [54]).
1.1.1 Lie's Classical Point Symmetries
In essence, the classical method for finding symmetry reductions of a given nth order
P D E (n > 2) in one dependent variable u and k independent variables x = (xi, x2> • • • £fc),
A(x,u,uXii,uXiiXi2,... ,uXiiXh...XiJ =0, (1.1)
ip = 1... k, p = 1... n ,
is to find a one-parameter Lie group of transformations, in infinitesimal form
x* =xi-reXi(x,u) + 0(e2) (1.2)
u* =u + eU(x,u) + 0(e2) ,
which leaves (1.1) invariant. The coefficients Xi and U ofthe infinitesimal symmetry are
often referred to as 'the infinitesimals'.

Introduction
This invariance requirement is determined by
r(n)A
where k
dxi du
A.„=0' w
r = £ j r i ( ^ 0 ) ^ - + ^ u ) | r (1.4) t = l
are vector fields which span the associated Lie algebra, and are called the infinitesimal gener
ators ofthe transformation (1.2), and r(n) is the nth extension (or nth prolongation) of F ,
extended to the nth jet space, co-ordinatised by (x, u ^ ) = (x,u,uXi ,...ux. Xi ...x. ).
The prolonged vector field is
TJ. . . (x u(n))
(1.5)
du
(1.6) where Ui = DiU — (DiXj)uXj ; i = 1... k ,
Uiii2...in = ^in\yiii2---in-x) ~ \-'^in^-j)UXi1Xi2...Xin_1Xj )
ip = 1,2,... k for p = 1,2,... n ,
and where Di is the total xi -derivative
n __d_ | r _ d _ Di ~ dxi + Uxi du +2^Ux^ dux.
+ •' • • i j x3
Here and in the sequel, it is assumed that repeated indices, such as j, signify summation
from 1 to k .
Equation (1.3) is a polynomial equation in a set of independent functions ofthe derivatives
of u. As the equation must be tme for arbitrary values of these independent functions, their
coefficients must vanish, leading to an overdetermined linear system of equations, called
the determining equations for the coefficients Xi(x,u) and U(x,u). Then for known
functions Xi and U, invariant solutions u corresponding to (1.2), satisfy the invariant
surface condition (ISC)
fi = ^Xfau)^ - U(x,u) = 0 , (1.7)

Introduction 4
which when solved as a first order P D E , by the method of characteristics, yields the functional
form of the similarity solution in terms of an arbitrary function,
i.e. u = f(x,(j)(z1,Z2,...zk-i)) , z{ = Zi(x), i = 1,2, ...,fc-l (1.8)
where <p is arbitrary.
Substituting this functional form (1.8) into (1.1) produces a quotient equation with one
less independent variable, which one solves for the arbitrary function <p(z\, 22,..., 2fc-i).
1.1.2 Lie-Backlund Symmetries (or Generalised Symmetries)
Noether [4], in 1918 considered the possibility of the existence of Lie-Backlund sym
metries whereby PDEs such as those in evolution form
ut = K(x,u,uXii,uXiiX.2,...uXiiXi2...Xin) (1.9)
remain invariant under Lie-Backlund transformations characterised by infinitesimal transfor
mations whose infinitesimals can depend on derivatives of the dependent variable up to any
finite order p,
i.e x* = x , - i-i+eXi lx,u,uXii,...uXixX.2...x ) +0(e2)
/ \ \ ( L 1 0 )
u* = u + eU [x,u,uXii,.. .uXiiXi2...Xi \ +0(eji) .
However Boyer [5] in 1967, showed that the generality of (1.10) was unnecessary, as it
was equivalent to
U* = U + € L/(X, U, UXii, . . . , UXiiXi2...Xip ) UXiXi I X,U, W X i i , . . . , Wxt1xi2...xip J 4-0(e2)
in the sense that both transform u = f(x) to the same function. Hence one only needs to
consider transformations of the form
x* = x
( \ 9 (i-11) u* = u + eU \x,u,uXii,uXhX,2,... ,uXiiX.2_x.p j +0{el) ,

Introduction 5
or infinitesimal generators of the form
T = U (x,u,uXH,... ,uXiiXi2...Xip^) — . (1.12)
The condition for invariance of (1.9) under the Lie-Backlund transformation (1.11) is
essentially the same as for point symmetries, namely
r^[ut-K] = o, ut=K
where r(n) is the nth extension of T . Note that the prescription (1.6) still applies when U
depends on higher derivatives of u.
Fokas [6] in 1980 showed that this invariance condition could be expressed alternatively
as
-Ut + U'[K]-K'[U}=0, (1.13)
where prime here denotes the Frechet derivative.
It is important to note, that even though Lie-Backlund transformations cannot be in
tegrated to a global transformation by the method of characteristics, they can be used to
construct invariant solutions and conservation laws (the very reason Noether was interested
in them).
1.1.3 Nonclassical Symmetries (or Conditional Symmetries)
In 1969, Bluman and Cole [7] proposed a generalisation of Lie's method for finding
group-invariant solutions, which they named the nonclassical method. In this method, also
known as the 'method of conditional symmetries', our P D E
A (x,u,uXii,uXiiXi2,... ,uXiiXi2...Xin) = 0 (1.14)
is augmented with its invariant surface condition
Y,xiUXi -17 = 0. (1.15)
Then the requirement that this system be invariant under
x* =Xi + eXi{x,u) + 0(e2)
u* =u + eU{x,u) + 0(e2) (1.16)

Introduction 6
yields an overdetermined nonlinear system of equations for the infinitesimals Xi and U.
Thus the invariance of the P D E (as for the classical method) is now replaced by the weaker
condition for the invariance of the combined system (1.14) and (1.15), so that w e require
that the appropriate prolongations of the vector field should annihilate both equations on the
solution surface of both equations,
i.e. T ^ A
and r^ft
= 0 (1.17) A = O , n=o
= 0, (1.18) A = O , n=o
where T and Q are given in (1.4) and (1.7) respectively.
Hence the set of solutions includes all those to be found by the classical method, and
thus in general is a larger set, making it possible to find further types of explicit solutions by
the same reduction technique. W e will say that a nonclassical symmetry vector field (1.4) is
equivalent to some classical symmetry vector field with co-ordinates (Xi, U) if
(Xi,U) = iP(x,u)(XhU) (1.19)
for some function ip. This is a practical definition of equivalence, since both of these
symmetries have the same invariant surface, leading to the same variable reductions of the
governing PDE. W e will use the term strictly nonclassical for nonclassical symmetries which
are not equivalent to any classical symmetry.
1.1.4 Symmetry Reductions by the Direct Method
Since 1969 there have been various modifications to the nonclassical method. In par
ticular Olver and Rosenau ([8], [9]) in 1987, generalised the nonclassical method to include
'weak symmetries' and 'differential constraints'. However, this framework has so far been
found to be too general to be implemented algorithmically.
Motivated by this, Clarkson and Kruskal in 1989 [10], developed a direct, algorithmic
method called the direct method for finding symmetry reductions. The method does not use
group theory, its basic idea being to seek solutions of the form
u(x, t) — F(x, t, w(z(x, £))) (1.20)

Introduction 7
(except in special cases [11]), which could be considered as the most general form of the
similarity solution for a P D E of two independent variables. Substituting (1.20) into the
governing P D E , and requiring that the P D E result in an ordinary differential equation (ODE)
for w(z), imposes conditions on F and z and their derivatives. Using this method, Clarkson
and Kruskal obtained many previously unknown reductions of the Boussinesq equation. The
relationship between this direct method and the nonclassical method has been discussed
in many papers (see e.g. [12], [13]). However, a group theoretic explanation has been
established, where it has been shown that all new solutions obtained by the direct method
can also be obtained using the nonclassical method ([12],[14]). In fact, it has been shown
by Pucci [15] in 1992, that the similarity solutions corresponding to the nonclassical groups,
should in general constitute a larger family than that obtained by the direct method, since
the reduction (1.20) used in the direct method, is equivalent to finding only those similarity
solutions of nonclassical groups for which the ratio of infinitesimals — is independent of u
d d and T ^ O (here X is the coefficient of — , and T the coefficient of — in (1.4)).
dx dt
1.1.5 Generalised Conditional Symmetries
In this recent approach due to Fokas and Liu [16] in 1994, the ideas of Lie-Backlund
(generalised) symmetries, are combined with those of nonclassical (conditional) symmetries
to form generalisations of conditional symmetries i.e. generalised conditional symmetries
(GCSs).
The definition as given in [16] is as follows:
Definition: The function o(u) is a generalised conditional symmetry of the equation
ut = K(u) iff
K'[o]-o'[K]=F{u,a) (1.21)
such that F(u, 0) = 0 ,
where K(u),o(u) are differentiable functions of u,ux,uxx,..., while F(u,o) is a dif
ferentiable function of u, ux,uxx,... and cr, ox, oxx,...; and prime denotes the Frechet
derivative.
The above definition can be easily extended to include the time-dependent case.

Introduction 8
A novel feature ofthe G C S method is that it can be used to show how seemingly unrelated
PDEs share exact solutions. For if cr is a G C S of ut — K(u) and if G(u, 0) = 0 then cr
is also a G C S of the P D E
ut = K{u) + G(u,a) . (1.22)
Thus all the PDEs (1.22) share with ut — K(u) the common manifold of solutions
obtained through the G C S cr.
In this thesis, although Lie-Backlund symmetries are used in generalised conditional
symmetry analysis, first order Lie contact symmetry analysis will not be carried out directly
on classes of PDEs. Also, the investigations will not be generalised to nonlocal symmetries.
1.2 Structure of this Thesis
In Chapter 2 w e are concerned with finding new exact solutions to
ut = -^(f(u)g(ux)) + h(u) (1.23)
with particular emphasis when h(u) = 0. In this case, equation (1.23) has been of much
interest in its connection with degenerate parabolic/hyperbolic behaviour, as described in
Section 2.1. In this chapter w e concentrate on using Lie's classical method as our main
method of solution, which in fact helps us to find an interesting class of linearisable PDEs.
As well, w e provide exact solutions for quenching of a step function initial condition. In
strongly degenerate models, these solutions remain discontinuous for a finite time. These are
the first exact solutions displaying this phenomenon.
Chapter 2 illustrates Lie's classical method and shows that it is still very useful in
obtaining new solutions and gaining new insights. Furthermore, it lays the foundation for
more general symmetry-based techniques that have a similar rationale. This leads to Chapter
3 where generalised symmetry methods are introduced and applied.
In Chapter 3 w e use two generalisations of Lie's classical method, namely the non-
classical method and the method of generalised conditional symmetries, to find solutions
to nonlinear parabolic equations of practical interest, including nonlinear reaction-diffusion
equations in two spatial dimensions. As well, w e introduce a new approach for identifying
strictly nonclassical symmetries based on our definition given in Section 1.1.3.

Introduction 9
Finally in Chapter 4, w e investigate possible roles of symmetries in applying the ad-
hoc techniques of finding nonlinear superposition principles (NLSPs) and equation-splitting.
With the use of symmetries, w e derive an interesting result relating the existence of N L S P s
and the linearisability of P D E s of two independent variables. This result then helps us to find
a broad new class of integrable models for steady two-dimensional unsaturated flow in scale
heterogeneous porous media. T w o related applied boundary value problems are then solved.
The motivation for studying these topics will be raised in the appropriate chapters.

Chapter 2
The Nonlinear Degenerate Diffusion Equation
and its Extensions
2.1 Introduction
Quite recently there has been considerable interest in the behaviour of the solutions of
nonlinear diffusion equations of the form
"• = h w^w) (2.1) = f(u)g'(ux)uxx + f'{u)g(ux)ux
where / and g are functions of u and ux respectively, and the prime denotes differentiation
with respect to the indicated argument. This is especially so in the case where / is strictly
positive and g is a strictly increasing function with
lim g(s) = goo < oo s—>oo
(see [17], [18]). In this case, the P D E is a strongly degenerate parabolic equation and it serves
as a model for heat and mass transfer in a turbulent fluid.
Equation (2.1) is a conservation equation with flux f(u)g(ux). This may arise from a
conductivity f{u)g(ux)/ux depending on both concentration u and concentration gradient
ux . For the purpose of classifying the P D E , the most important function is f{u)g'(ux),
which w e may regard.as the diffusivity. If this function is nowhere zero, then (2.1) is a
parabolic equation. However, if there are critical values of u and ux , possibly finite or
infinite, where the diffusivity vanishes, then (2.1) is degenerate, which may be manifest in the
solutions in the guise of various forms of typical hyperbolic behaviour. In the most extreme

Nonlinear Degenerate Diffusion 11
cases, gradient blow-up may occur, with distinct concentration layers developing in finite
time, as observed in real fluids [18].
As well, Bertsch and Dal Passo [17] show that in the case / — 1, discontinuities may
persist when g' decreases faster than u~2 .
Motivated by these results, in Section 2.2 we look for new exact solutions of (2.1) and
find an interesting class of linearisable PDEs. In Section 2.3, we consider the case / = 1
and diffusivity decreasing faster than u~2 and construct an exact solution with step function
initial condition. Finally in Section 2.4, we briefly examine the extension of equation (2.1)
ut = fa(f(u)g(ux)) + h(u) , h^O,
which we find also contains a linearisable class of equations.
2.2 The Integrable Nonlinear Degenerate Diffusion Equation ut = (f(u)u~1)x and its
Relatives
2.2.1 Background
In recent years, there has been widespread interest in finding exact solutions of integrable
nonlinear PDEs in general. The solutions of these equations are usually expressed in terms
of the solutions of either linear integral equations or linear PDEs.
Fokas and Yortsos [19] have considered the integrable second order P D E
ut = ((Pu + l)~2ux)x + a{(3u + j)~
2ux (2.2)
where a, (3, and 7 are arbitrary constants. Using the symmetry approach of Fokas [6], they
found a general equation of the form
ut = g(u)uxx + f(u, ux) ; — ^ 0 (2.3)
which is equivalent to the linearisable equation (2.2). This is then mapped to Burgers'
equation by the extended hodograph transformation. Subsequently, Broadbridge and Rogers
[20] found an additional class of equations of the form (2.3) that can be transformed to
the potential Burgers' equation. In a related investigation, Clarkson et al [21] found the

Nonlinear Degenerate Diffusion 12
most general equation of the form (2.3) that may be transformed by an extended hodograph
transformation to a semilinear PDE. Such equations are equivalent to
vt = v~2vxx + H(vx)
9 f-X\ , rrt (2'4)
= d-x[-u-)+HM-(2.4) is then transformed via a hodograph transformation to
Vr = Vee - r]eH{r]-1) .
In this section, we look for exact solutions of (2.1) and in the process, find an interesting
new class of linearisable PDEs. In Section 2.2.2, we perform a classical symmetry analysis
of (2.1) with the aid of the automated computer algebra package D I M S Y M of Sherring [3].
Using the symmetries thus found, we list some new exact solutions. In Section 2.2.3, by
using the method of Foursov and Vorob'ev [22], we show how symmetries can be used to
find numerical invariant solutions.
Motivated by the existence of an infinite dimensional symmetry group for (2.1) when
q(ux) = — yV J ux
i.e. «' = l('«i)- ^ in Section 2.2.4 w e perform a hodograph transformation on (2.5) and show that it is linearis
able, being equivalent to
f{u)xuu + f'{u)xu + xt = 0 . (2.6)
Thus the general equation (2.5), which may be regarded as an extension of (2.4), is a linearis
able form of equation (2.1). W e then examine (2.6) to find when it can be transformed to a
linear equation with constant coefficients. This is useful for obtaining solutions by integral
transform methods.
In Section 2.2.5, w e investigate the possibility of obtaining solutions to (2.6) by the
Sturm-Liouville approach. It turns out that after separating variables x and t, the corre
sponding second order ordinary differential equation in u is self-adjoint.
Equation (2.5) may be used to illustrate the effect of degeneracy at ux = oo. It
has the most important feature of many practical degenerate diffusion equations, namely

Nonlinear Degenerate Diffusion 13
that the nonlinear diffusivity approaches zero monotonically for ux sufficiently large. In
one example, we solve the Cauchy initial value problem with an initial discontinuous step.
Unlike the case of strong degeneracy [17], the solution is smooth for all t > 0. In two
other examples, we maintain zero flux and constant concentration on free boundaries. In both
cases, the solution evolves rapidly towards a discontinuous step.
2.2.2. Classical Lie Symmetry Analysis
For any functions / and g of u and ux respectively, the PDE
ut = d_
dx\ f(u)g(ux)j (2.7)
d d has translation symmetry, generated by the vector fields — and — .
Also, for arbitrary g, the following functions / lead to extra symmetries, represented
by the following extra symmetry generators:
/(«)
un
eau
Extra Symmetry Generators
Ud^ + {2-n)tcTt+Xd-x
d d
du dt
If we let v = ux , then according to D I M S Y M [3], the functions g that might give
symmetries other than those already listed, are such that
g"(v)v2 , g"(v)v , g"{v) , g'{y)v and g'(v)
are dependent. W e thus considered the cases of g(v) being vn, arctanh(v),
arctan(v),ln(av + b), vneav, ^ = f , arcsinh(v) and erj\v).
W e note that a symmetry analysis for the P D E
ut = Q^(9(UX)) (2.8)
3 0009 03204611 7

Nonlinear Degenerate Diffusion 14
has already been carried out (e.g. [23]), so we choose to ignore it here. Also, as the case
g(ux) = ux and f(u) arbitrary
i.e ut = —(f(u)ux)
is transformable to a PDE of the type (2.8) (see [23], [24], [25]), we ignore this case as well.
In Table 2.1 at the end of this chapter, we list the classical symmetries found for (2.7),
with corresponding variable reductions and some invariant solutions. In particular, w e note
that w e find a solution
u = - ln(6 -t)- e~ax f eax ln (- + c) dx (2.9)
for x > —ac , t <b
to the P D E
ut=i£ (e~aue~ux) • (2-IQ)
This solution (2.9) blows up at some finite time t = b, even though the P D E (2.10) has
positive diffusivity e~aue~Uxuxx .
2.2.3 Using the Method of Foursov and Vorob'ev
Many of the quotient equations that we display in Table 2.1, could not be solved analyti
cally when we substituted the functional form ofthe similarity solution into the original PDE.
However Foursov and Vorob'ev [22], showed that there is an algebraic way of obtaining the
quotient equations, which lends itself to finding numerical invariant solutions.
W e illustrate the method here with an example.
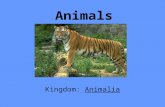
Example 2.1 From Table 2.1, the P D E
Ut = ~d~x ^U^ (2'U)
has a classical generator
(From (2.12) then, equation (2.11) has a solution u - <f>(z), z — xt~1/3 where <p satisfies
*" + ^ ' ) 2 + fe-* = 0.)

Nonlinear Degenerate Diffusion
Using the method of Foursov and Vorob'ev w e perform the following steps:
i) W e substitute the invariant surface condition (ISC) corresponding to (2.12), namely
15
XUx *un ut = — — i ' r ^ 3*
into (2.11); and setting t = 1, w e get
6u,x + Sut + xe~u = 0 . (2.13)
ii) W e then solve (2.13) numerically (we use the computer package M A P L E [26]) with the
initial conditions u(l) — 1 and u'(l) = 1, for its solution which we call u = J(x).
iii) W e then obtain the solution to (2.11) with the help of the 1-parameter transformation
group corresponding to the generator (2.12). Using t = te3£, x = xe*, it = u, we
intersect t = 1 with u = J(xe - e ), and on eliminating e we get the shape of the
invariant solution,
i.e. u = J (if"1/3) ,
shown in Figure 2.1.
Figure 2.1: Invariant solution of (2.11) corresponding to the generator (2.12).

Nonlinear Degenerate Diffusion 16
2.2.4. A Linearisable Class of Equations
From Table 2.1, we see that the PDE
*=t (/wi) (2-14) (i.e. g(ux) = •£-) has an infinite dimensional classical symmetry, namely
h(t,u)-
where h is an arbitrary solution of
fhuu + f'(u)hu + ht = 0. (2.15)
This indicates that (2.14) can be transformed to the linear equation (2.15) by an invertible
point transformation [23].
It is well known that in the special case / = 1, (2.14) transforms to the linear diffusion
equation by the hodograph transformation (e.g. [21]). Remarkably, under the hodograph
transformation, the much more general equation (2.14) is still linearisable, being equivalent
to
f{u)xuu + f(u)xu + xt = 0 . (2.16)
In this section, we find when equation (2.16), which we will write as
f'(u) xt ,
/ w f(u) is convertible to one with constant coefficients. W e would then be able to apply standard
linear transforms to solve it more easily.
W e know from Bluman and Kumei [23], that there exists a point transformation of the
form x\ — xi(u,t)
x2=x2(u,t) (2.18)
z = H(u,t)x
so that (2.17) will be transformed to
d z dz + __+„(*,,*,), = „ (2.19)

Nonlinear Degenerate Diffusion 17
where UJ is some function of x\ and x2
Substitution of (2.18) into (2.19) and comparison with (2.17) gives us our required transfor
mation,
xi = . du , af > 0 J y/af(u)
(2.20) x2=t
z = P(f(u)f*x
with a and (3 constant.
Then
UJ = a ( / » ) 2 / ' » (2.21) 16/(u) 4
which by (2.20) is a function of x\ alone. Hence, equation (2.19) admits separation of
variables in a;i and x2 .
Also, if a; is a quadratic of the form
Ul = CLQ + CLiXi + a2x\ ,
then (2.19) can be transformed to a linear PDE with constant coefficients [23]. Hence from
(2.20)i and (2.21), equation (2.19) can be transformed to have constant coefficients provided
( / » ) 2 /"(«) a< 16/(«) 4
= ao + &i —, du + a2 I / —, du
(2.22)
\A*/(u) " V Vaf(u)
Example 2.2
/(u) = w2 satisfies (2.22) with a0 = — \ and ai = a2 — 0 . Then w(x\) — —\.
Hence the P D E
by change of variable
xt + 2uxu + u z u u = 0
x\ = \nu
x2 = t
i
Z = U2X

Nonlinear Degenerate Diffusion 18
becomes the parabolic normal equation
d*z dz z + -7=0 dx2 dx2 4
which is equivalent to the classical heat equation (e.g. [27]).
Example 2.3
f(u) = ut satisfies (2.22) with a0 = oi = a2 = 0. Then UJ(X\) = 0 , so that the PDE
4 1 4
xt + -u*xu + u*xuu = 0 ,
by change of variable i
x\ — 3u3
x2 = t
i
z = U3X ,
transforms to the standard reverse diffusion equation with constant coefficients,
d2z dz n
d^ + dx-2=°-
Although time-reversed linear diffusion equations are convenient canonical forms, in all of
the following explicit solutions, we have positive diffusivity.
Example 2.4 We solve
d I —us
subject to the initial condition
"*=& U r i (2-23)
l X = —j- u < 1
U3
= 1 1 < u < 8 (2.24) 2 T U3
w > 8
and boundary conditions
dx • -oo as u —> 0
and > 0 as u -* oo
(2.25)

Nonlinear Degenerate Diffusion 19
dx as well as continuity of both x and -?— at u
du 1,8. With these initial conditions, the
solution conforms to a steady state at a large distance from the origin, but u is initially
discontinuous with a finite step at x = 1.
Via the hodograph transformation, (2.23) becomes
4 1 4
•xt + -u3xu + u3xuu = 0
From example (2.3), the transformation
Xi = 3u3
x2 = t
z — u3x
would transform (2.26) to a2; dz dx2 dx2
Using (2.27), the initial condition (2.24) transforms to
z — \ x\ < 3
= ^ 3 < xi < 6 3 ~
= 2 xi > 6
and the boundary conditions (2.25) transform to
arci #1
-27z 27 dz
as zi oo
Xr + x^ dx\
— 00 as Xi 0
continuity of z at x\ =3,6 and
continuity of -27z 27 dz
+ x\ x\ dx\ at x\ = 3,6 .
(2.26)
(2.27)
(2.28)
(2.29)
(2.30)
Using Laplace Transforms (with respect to x2 ), we solve (2.28) subject to (2.29) and
(2.30) and arrive at the following solution, in terms of our original variables:
3 — 3u3 \ y/t ( 6 — 3u3 x(u, t) u< 1
= U 3
= u 3
3u 3 — 3 \ i
+ u3 1 < u < 8 (2.31)
u>8

Nonlinear Degenerate Diffusion 20
where g(X) = —-=e -X2
X erfc (X).
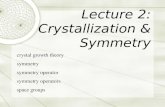
The solution is depicted in Figure 2.2 with output times t= 0.05, 0.5 and 2.0.
c o
c Cr
c <x> o c o u
20. i-
18.
16.
14.
12-
10.
8- h
6.
A.
2.
0 7 ~ ~ ~ — + » »,--X. -4 0.50 0.65 0.80 0.95 1.10 1.25 1.40 1.55 1.70 1-85 2.00
position x
Figure 2.2: Solution of equation (2.23) subject to non-smooth initial condition (2.24)
and boundary conditions (2.25).

Nonlinear Degenerate Diffusion 21
2.2.5. Solution by the Sturm-Liouville Approach
The previous section paid particular attention to constant coefficient equations. However,
w e can still obtain some solutions when the equivalent linear P D E cannot be transformed to
a constant coefficient equation.
The equation (2.16) is recognisable as the equation for heat flow in a non-uniform rod. If we
let x(u, t) = (j>(u)T(t), then w e have
(f(p'Y -\<j> = 0 and (2.32)
T(t) = ce-Xt .
W e recognise (2.32)i as a Sturm-Liouville differential equation. To solve this equation
as a regular Sturm-Liouville problem for u\ < u < u2 , w e require that / < 0 on the
interval and that the solutions obey the homogeneous boundary conditions
/310(u1) + /320,(u1) = O
(2.33)
M{u2)AM'{u2)=Q, where /5i, /52, p3 and /54 are constants (see [28], [29]).
According to theorems concerning regular Sturm-Liouville problems, w e know that there
exists an infinite increasing sequence of eigenvalues A n with corresponding eigenfunctions
0 n so that oo
X(%t) = YJan<f>n(u)e~Xnt • (2-34)
n=l
These eigenfunctions are orthogonal with respect to the weight function UJ(U) = 1,
i.e. / <f>n(u)<f>m(u)du = 0 , n^m;
so that if initially x(u, 0) = g(u), then we can find the coefficients an in (2.34) by
Jul 9{u)<j>n{u)du

Nonlinear Degenerate Diffusion 22
As the eigenvalues A n form an increasing sequence, A n —> oo as n —> oo, then for
large time from (2.34), our solution can be accurately approximated by
x(u,t) «a!</)i(u)e~Alt (2.35)
(or the first non-zero term).
From the Rayleigh quotient, where any eigenvalue can be related to its eigenfunction
_ f(u2)<f>(u2)cf>>(u2) - / ( l i i M t - i M m ) - ft f{u){<j>'{u)fdu
JU1 (w)2du
we see that if we apply boundary conditions satisfying (2.33) and which correspond to typical
physical problems such as prescribed temperatures at the boundaries, prescribed heat flow at
the boundaries or even Newton's Law of cooling, then from (2.36),
A>0.
Hence from (2.35) we expect x to decay in time or stay constant.
Example 2.5 (Regular Sturm-Liouville Problem)
The choice f(u) = —u2 in (2.16) leads, via the hodograph transformation, to
u2xuu + 2uxu - xt = 0 .
We choose the initial condition
, n. u3 bu2
^(U, 0) = y - — + 4U
and boundary conditions
| ( M ) = 0,|(4,*) = 0
on the domain (1,4) x [0, oo) for x(u,t).
From the point of view of the nonlinear equation (2.14), these are zero flux boundary
conditions on free boundaries xi(i), x2(t), where u also has specified values 1 and 4.

Nonlinear Degenerate Diffusion
Using separation of variables, we find
/ .L\ V^ -(i+J£s£r)* -1 i k7r
x(u,t) =2_^cke \*^*UZipJ u 2 < 7 - r
fc=i I n
23
cos I .. . Inu I + sin ( —r—r lnu 1 *> + A 21n2 21n2
where Ck = f? (£ - ¥ + 4") [^{fe™^™) +*Xm5^)}[ du
/ii[lScos(^lnu)+sin(^lnu)] rfu
and A = -0 • 416. This is depicted in Figure 2.3.
t = 0.1 t = 0.5
position .c
Figure 23: Solution of equation (2.5) with f(u) = — u2 with initial and boundary conditions
as in Example 2.5. The solution tends towards a discontinuous jump.

Nonlinear Degenerate Diffusion 24
As w e can see from Figure 2.3, as t increases, the solution x tends to a constant (namely
— 0 • 416) and thus u tends to a vertical jump.
Thus, in this case it is not difficult to formulate a simple boundary value problem for
which a solution develops an infinite gradient from a smooth initial condition. However,
unlike in some strongly degenerate problems, this derivative blow-up does not occur in finite
time.
Example 2.6 (Irregular Sturm-Liouville Problem)
We solve
(1 - u2)xuu - 2uxu -xt = 0 (2.37)
(i.e f(u) = u2 — 1) on the interval —1 < u < 1, subject to the solution x(u, t) being
bounded at u = + 1 and
x(u,0) =g(u) .
From the point of view of the original nonlinear equation (2.14), the boundary conditions
specify only that the critical values u = + 1 for degeneracy occur at finite values for the
location x.
Letting x(u, t) = (f)(u)T(t) in (2.37) we find
T(t) = ce~xt and
(1 - u2)(j)"(u) - 2u<p' + \(f) = 0 .
Hence the eigenvalues are A n = n(n + 1), n = 0,1,2,... and the corresponding eigen
functions are the Legendre polynomials Pn(u); so that
oo
x(u,t) = Yja,nPn{u)e-<n+Vt
n=0
where an = ( — - — j / g(u)Pn(u)du .
In Figure 2.4 w e let g(u) = u3 , and we can see graphically how the solution x decays to
zero with increasing time. Thus, as in the previous example, from the point of view of the
nonlinear equation (2.14), u tends to a vertical jump from smooth initial conditions.

Nonlinear Degenerate Diffusion 25
Figure 2.4: Solution of equation (2.5) with f(u) = u2 — l,x bounded where \u\ = 1 and
initial condition x = u3. The solution tends towards a discontinuous jump.
2.2.6 Summary
Our classical Lie point symmetry analysis of equation (2.1) has provided a rich array of
similarity reductions for special cases of power law and exponential coefficient functions. This
analysis has revealed that equation (2.5) is linearisable by the hodograph transformation, in the
case of general f(u). For this class of integrable degenerate nonlinear diffusion equations,
the diffusivity is of the form f(u)/u2x , for some function /. Since the diffusion equation is
degenerate as ux —* oo, hyperbolic behaviour may be apparent in the solutions in the vicinity

Nonlinear Degenerate Diffusion 26
of large gradients. Some of our explicit solutions, with zero flux and constant concentration
at free boundaries, exhibit an asymptotic approach to concentration jump conditions from
smooth initial data. However, discontinuous layers do not appear in finite time, as they do
in strongly degenerate models for which the diffusivity diminishes more rapidly than u~2
([17], [30]). In the solutions that we have constructed, ux is everywhere non-zero so that
the singularity at ux = 0 is not important.
W e have identified the class of functions / which will allow (2.5) to be transformed to a
linear equation with constant coefficients. In all other cases, equation (2.5) can be transformed
to a linear P D E with variable coefficients, which leads to a self-adjoint equation by separation
of x and t variables. Thus, a vast array of exact solutions is available by linear transforms
and by orthogonal expansions in Sturm-Liouville bases. These solutions help to provide
insight on nonlinear phenomena and they provide valuable bench tests for software designed
to solve difficult degenerate equations which arise in a variety of transport processes.
Finally, w e have found that (2.5) extends to a third order integrable P D E
a ut = «-
dx
/(«)
Un +
a 2
dx2 9(u) ul
(2.38)
which is equivalent to
xt + 2g(u)xuuu + [3g'(u) + f{u)]xuu + [g"(u) + f'{u)]xu = 0 (2.39)
under the hodograph transformation. So far we are not aware of any direct applications of
(2.38).
2.3 Degenerate Nonlinear Diffusion with an Initially Sharp Front
2.3.1 Background
In this section w e consider the case where f(u) = 1 in equation (2.1),
i.e. ut — g'{ux)uxx . (2.40)
The case f(u) = 1 is sufficient to illustrate degenerate behaviour. We provide exact
solutions to (2.40) subject to discontinuous initial conditions for the case where the degree

Nonlinear Degenerate Diffusion 27
of nonlinearity leads to persistence of discontinuities and also for the case where the degree
of nonlinearity leads to instantaneous quenching.
There are many fundamental physical processes involving diffusion with discontinuous
initial conditions. For example, in the case of molecular diffusion, a mechanical barrier
between two mixtures with different chemical compositions may suddenly be removed. Sim
ilarly, in the case of heat conduction, two isolated materials of different temperature may
suddenly be brought into thermal contact. In the example of transport by evaporation -
condensation at solid surfaces, the initial discontinuity is directly observable on the surface
profile of a recently formed crystal with an edge dislocation that is large compared to a single
atom [31]. In the simplest model, diffusive transport is governed by the classical linear heat
equation
ut = DQ uxx , (2.41)
with D Q constant. This model has had a long and successful history in predicting the
outcomes of a variety of experiments. One advantage of equation (2.41) is its susceptibility
to almost every known solution method for linear partial differential equations. However, we
must remind ourselves that it embodies only a rough approximation to reality, which is more
accurately represented by nonlinear equations.
In the case of surface evolution by evaporation-condensation, (2.41) is merely the small-
slope approximation to the Mullins equation [32]
ut = -x , ° iuxx (2.42) 1 + ux
which is based on the Gibbs-Thompson formula. Moreover, in classical applications, there is
some dissatisfaction that equation (2.41) predicts instantaneous smoothing of discontinuities,
or instantaneous quenching of surfaces at thermal disequilibrium [33].
As explained by Rosenau ([34], [30]), at its thermodynamic foundations, the linear
theory follows from a quadratic free energy density P(ux), leading to a constant diffusivity
D = P"(ux). Allowing P(ux) to be general, we are led to consider the equation
ut = D(ux)uxx , (2.43)
where D = P".

Nonlinear Degenerate Diffusion 28
This is equivalent to (2.40).
Equation (2.43) is a conservation equation,
du dJ
dt dx
with flux J = -P'(ux).
Instantaneous quenching occurs if vertical steps incur an infinite energy cost on the Hamilto
nian [30]
H = uxP'{ux)-P(ux). (2.44)
Conversely, by the same physical argument, Rosenau suggested that discontinuities persist
beyond the initial instant provided the expression (2.44) has a finite limit as ux tends to
infinity. Hence, we infer that discontinuities may persist provided the diffusivity P"(ux)
decreases more rapidly than u~2 for large ux .
Subsequent to Rosenau's suggestion, it was proved by Bertsch and Dal Passo [17] that
u(x,t) is a continuous function in C2,1(R x R + ) provided
/•OO
Jo sD(s)ds < oo , (2.45)
and that u(x,t) is discontinuous for a finite time T > 0 provided the above integral is
finite. Hence, it is rigorously established that degenerate diffusion leads to persistence of
discontinuities only if the diffusivity decreases more strongly than u~2 when ux is large.
The critical nature of a degenerate nonlinear diffusion process with diffusivity decreasing
as u~2 at large ux , motivates us to construct here an exact solution with step function initial
condition. This critical model will display the least pronounced smoothing of any nonlinear
diffusion model with instantaneous quenching.
For comparison, by a very simple procedure, we are able to constmct an exact closed-
form solution in a particular supercritical case for which D(ux) decreases exponentially with
ux . The solution shows a discontinuous step closing in finite time ti > 0 . The only example
solution given previously was evaluated numerically after a single similarity reduction to a
nonlinear ordinary differential equation [30].

Nonlinear Degenerate Diffusion 29
2.3.2 A Step that is Discontinuous for a Finite Time
The aim of this section is to construct a supercritical degenerate nonlinear diffusion
equation possessing an explicit solution that is spatially discontinuous for a finite non-zero
time. In this construction, w e follow Philip's inverse approach [35] that has previously been
applied only to continuous solutions. The procedure is to propose a feasible solution and then
to construct the nonlinear diffusivity from the solution.
W e consider the initial value problem with step function initial condition:
(I) yt = D{yx)yxx (2.46)
y(x,0)= 1 x>0
= - x = 0 2
= 0 x < 0 . (2.47)
W e presume that for large yx , D(yx) approaches zero more rapidly than y~2 , so that the
step will decrease in size but remain discontinuous for t G [0,£i) where t\ > 0 is the
smoothing time.
With (x,t) in [0, oo) x [0, ti), the gradient 0 satisfies
d (E) 9* = dx "«£ (2.48)
0 -• oo x -* 0 (2.49)
0 = 0 t = 0 x>0. (2.50)
(2.48) is obtained from (2.46) by formal differentiation. The aim from here on is to obtain a
continuous solution satisfying (2.48)-(2.50) and then to integrate 0(x, t) to obtain a function
y(x,t) solving Problem I. Problem II is closely related to the standard problem with Dirichlet
boundary conditions, in which (2.49) is replaced by
0 = 0Q (constant), x = 0. (2.51)
The standard Dirichlet boundary value problem has a well-known similarity reduction, satis
fying
1 rlfi d T dr?l (2.52)
1 AQ d
™ "2^ = H <

Nonlinear Degenerate Diffusion 30
0^0 cf) -> oo (2.53)
0 = 0O <f> = 0, (2.54)
where <f> is the Boltzmann similarity variable,
4> = xt'* . (2.55)
In Philip's inverse solution procedure [35] for Problem in, one first chooses a suitable solution
(p = f(0). Then this is a solution to HI, when the nonlinear diffusivity function is
D{0) =-\f{0) J f(0)d0, (2.56)
which follows directly by integrating each side of (2.52).
In order to solve Problem III, the function / must satisfy f(0o) = 0. Using the same
inverse procedure, w e attempt to solve Problem II by choosing a simple function / such that
f(0) ^ 0 as 0 -> oo
and for which the expression (2.56) for D(0) approaches zero more rapidly than 0~2 as 0
tends to infinity.
One elementary solution satisfying the above requirements is 0 = f(0) where f(0) =
ae'13, with a, /3 > 0. That is,
(2.57) 0 = — ln ( -^-= ) for 0 < x < aVi .
This similarity solution solves Problem II with nonlinear diffusivity function
DV) = 4 (e~06 - e'2P6) > (2-58) shown in Figure 2.5.
By integrating throughout (2.57), w e obtain
y(x, t) = y(0, t) - 1 x I ln f-^= J - 1 j , (2.59)

Nonlinear Degenerate Diffusion 31
8.0r-
.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40 0.45 0.50
g r a d i e n t d y / d x
Figure 2.5: The supercritically degenerate nonlinear diffusivity function of equation (2.58).
which satisfies
Q Vt = D(yx)yxx -r —j= + yt(0, t).
This agrees with the desired evolution equation (2.46) provided that for all t G (0, ti],
y(0,t) = y o - | t * (2.60)

Nonlinear Degenerate Diffusion 32
for some constant yo . For simplicity, we take yo = 1, in agreement with (2.47). The expres
sion for y(x,i) — y0 given by (2.59) is a compact support solution valid for
0 < x < ay/t and vanishing for x > a\/i.
With nonlinear diffusivity given in (2.58), equation (2.46) is degenerate not only at 0 = oo but
also at 0 = 0. This means that the profile becomes flat at a finite distance from the original
vertex (0,1), in either the vertical direction (where yx becomes oo) or the horizontal
direction (where yx becomes 0) in agreement with observations. In the horizontal direction,
the diffusing region extends to
* = /(0)t* t ^ (2.61)
= at2 .
In the vertical direction, the moving boundary of the diffusing region is given in (2.60).
The smoothing time is t\ = p2/4a2 at which time y(0, t) = - .
It is easy to see that the boundary value problem in the region x < 0 (where gradients
also remain non-negative) has an analogous similarity solution, since the problem (I) in the
region x < 0 can be transformed to problem II by taking y = 1 — y , x = — x and
0 = ys = yx . Hence, in the region x < 0, the solution is
H(1+ln(l£)) + /itJ for x<0' (262) At any time t, the rate of transfer of material from the region x > 0 to the region
x < 0 is given by the difference between the flux evaluated at x = oo and that evaluated at
x = 0 . Expressed in terms of cross section area A transported,
dA r dt J0
f°° dJ_ Jo dx
yt dx
dx
J(9) ° (where 9 = yx) J0 = OO
o£ 4/3'
(2.63)
since in this case,
J{0) = - J D(0)d0 = (2e-?e - e-2?6) . (2.64)

Nonlinear Degenerate Diffusion 33
From (2.63), w e observe that material is transported at a constant rate. This is a new property
of degenerate parabolic equations.
Eventually, at smoothing time t ~ t\ — /32/4o:2, the vertical wall of the profile
collapses to a single point. After that time, the value of yx (0, t) will be finite and decreasing.
Consequently, by (2.64), the flux at x = 0 will be increasing above zero and the net rate of
material loss from the right hand platform will be diminishing. Beyond t = t\, the solution
y(x, t) will be differentiable on R x (ti, oo) and the similarity solution will no longer be
valid [34].
The solution to problem I is depicted in Figure 2.6.
There, (a, (3) is chosen to be (8, 16) so that smoothing time f32 /4a2 and material
transfer rate a2/4/3 are both unity.
2.3.3. A Critically Nondegenerate Solution that is Discontinuous only at t = 0
In this section, we consider problem (I) with
D(yx) = (fe ) 2 (Do, b>0). (2.65)
With this nonlinear diffusivity, equation (2.48) is transformable to the linear diffusion equation
([36], [23]). This provides an example of critical degeneracy, D ~ y~2 at large yx . The
critical degeneracy at infinite gradient is not quite strong enough to allow discontinuities to
persist beyond t = 0 .
As a preliminary simplification, we define
T = D0t, x = bx and u = y + % + 1 • (2.66)
Then problem I becomes
subject to
uT = -^uxx (x, r) G R x R + (2.67) ux
u(x,o) = x + i X < 0
= X + 2 X > 0 • (2.68)

Nonlinear Degenerate Diffusion 34
'-"8.0 -6.4 -4.8 -3.2 -1.6 0.0 1.6 3.2 4.8 6.4 8.0
Figure 2.6: Exact solutions for smoothing of a discontinuous step. — supercritically de
generate model. — critically degenerate model. Successive output times are t = 0, -, 1.
After applying the hodograph transformation [21], equation (2.67) reduces to the linear dif
fusion equation
Xr = Xuu (2-69)
subject to
X(u,Q)=u-l
= 0
= u-2
u< 1
1 <u<2
u>2,
(2.70a)
(2.706)
(2.70c)

Nonlinear Degenerate Diffusion 35
Xu -» 1 as u -> +00 , (2.71)
X(U,T) continuous at w = l,2, (2.72)
and XU(U,T) continuous at u = l,2. (2.73)
In the hodograph transformation, u = u(x, T) is inverted and re-expressed as x = x(u>T) •
The continuity of the first derivative ensures continuity of flux
j= D" b + ya
If X(u,p) is the Laplace transform of %(w, r), the general Laplace transform solution to
(2.69)-(2.70) is:
for u < 1 ; X = Axeu^ + B1e~
u^ --(1-u), (2.74a) V
for 1 < u < 2 ; X = A2ewv^ + ^e"^ , (2.746)
and foru>2; X = A3eu^ + B3e~
u^ - -(2 - u) . (2.74c)
From the boundary conditions,
£1 = A3 = 0 ,
A2 = \p-h~2^,
B2 = -\p~h^,
and B3 = ip"* (e2v^ - e^) . (2.75)
Hence, by Laplace inversion, we have the solution:
for u<l, x=r*ierfc f —^J-r* ier/c ( —^J-l + u, (2.76a)
1 , [2 — u\ 1 . , /u—1\ . „,. for 1 < u < 2 , X=T2 ierfc ( - — = j - r* lerfc I —=• j , (2.766)
and for u>2, X=T* ierfc \^-=j - T* ierfc f^-^J-2 + w, (2.76c)

Nonlinear Degenerate Diffusion 36
where ierfc is the integral complementary error function [37].
Hence it is elementary to invert (2.66),
t = T/DQ , x = x/b , y — u — bx — 1
so that we have a parametric solution in terms of the original variables,
(u,t) -> (x(u,t),y(u,t)) •
As in the supercritical model of Section 2.3.2, for this critical model we may also obtain
an explicit expression for the rate of total material transfer:
dA /•OO
—t=-f nXtyx ••oo
' uT(x,r)dx b Jo
D0 ru /"OO
Jo XX
b In U2 dx
4 f *""("'T)dx • (2.77) b Jo Xu
3 N o w we note from (2.16b) that u = - at x = 0. This allows us to substitute variables
Zi
in (2.77), by which
dA Do f°° .
H = TJI Xuudu
Do r lO0
= T[Xuh T ^ I J T ? ) '
by(2-76&'c)> i „ ( i
= ---erf b VVZw —— as t —>• 0 o
\ (2.78)
^ 1 Do ~ 26V Trt
^0 as t —»• oo .
Considering the complexity ofthe solution (2.76), equation (2.78) is a remarkably neat result.

Nonlinear Degenerate Diffusion 37
Hence, in the critical case, material transfer proceeds at a diminishing rate. This is a
physical distinction from the supercritical case, in which material transfer has a constant rate
up until smoothing time t = t\. The solution is again depicted in Figure 2.6. So that it may
be easily compared with the discontinuous solution of the supercritically degenerate model,
the initial material transfer rate Do/b is chosen to be unity and the maximum diffusivity
Do/b2 is chosen to be eight (that is, 6 = 1/8 and D o = 1/8). In this case, the mean
diffusivity for 0 < yx < oo is unity for both models.
The material transfer rate is shown as a function of time in Figure 2.7.
CD -•->
o c c
<-r-
w c o c
Figure 2.7: Material transfer rate as a Junction of time, for the critically degenerate model.

Nonlinear Degenerate Diffusion 38
2.3.4. Summary
We have constructed exact solutions for degenerate nonlinear diffusion with discontinu
ous step initial conditions. In the case of supercritically degenerate diffusion, with gradient-
dependent diffusivity D(yx) decreasing more rapidly than y~2 , the solution remains dis
continuous up to a finite smoothing time t\. During this time, mass transfers from the upper
level of the step to the lower level at a constant rate.
In the case of critically degenerate diffusion, with D = O {yx~2), the solution is
continuous for all t > 0 .
The simple solution for the mass transfer rate suggests that for subcritically degener
ate models, the mass transfer rate will diminish rapidly, providing a measurable physical
distinction between subcritical and supercritical behaviour.
2.4 An Extension of Equation (2.1)
In this section we briefly consider a natural extension of equation (2.1); namely the
reaction-diffusion equation
ut = -^(f(u)g(ux)) + h(u), h^O; (2.79)
where / and h are arbitrary functions of u, and g is an arbitrary function of ux . As
explained in previous sections, nonlinear source terms and nonlinear dependence of diffusivity
on both concentration and its gradient have important physical consequences. However, these
three sources of nonlinearity have rarely been considered together in any single investigation.
In Section 2.4.1 we provide the results of a classical symmetry analysis of (2.79). As in
Section 2.2, this type of analysis again indicates a linearisable class of equations for the case
g(ux) = i/ux.
2.4.1 Classical Lie Symmetry Analysis
For arbitrary functions / and h of u and g of u s , the P D E (2.79) has translation
. tJ d d symmetry generated by the vector fields — , — .
In addition, if v = ux , then according to D I M S Y M [3], those functions g(v) which

Nonlinear Degenerate Diffusion 39
may give added symmetries are such that
g"(v)v2 , g"(y)v , g"{v) , g'(v)v and g'(v)
are dependent in v. This is signalled by DIMSYM stating a list of terms which were
considered to be independent in its symmetry analysis. Hence to find extra symmetries, we
need to consider the cases where these terms are dependent.
As in Section 2.2.2, w e thus considered the cases of g(v) being
v vn , arctanh(v) , arctan(t>) , \n(av + 6) , vneav , — ^ = , arcsinh('y) and erf (v) ,
V 1 + v2
where a, 6 and n are constants.
For each of the functions g(v) considered, D I M S Y M [3] indicated the possible functions
f(u) which could lead to extra symmetries. These in turn pointed to the possible functions
h(u). In this way w e managed to systematically find the classical symmetries of (2.79).
However in the linearisable case, g(ux) = l/ux , a full classical analysis was impossible as
D I M S Y M indicated that dependencies of 57 terms in / and h and their derivatives needed
to be considered. Hence in this case we considered the 4 possibilities
a) h = ukl +k2 ; / arbitrary,
b) h = eklU + k2 ; / arbitrary,
c) f = uCl ; h arbitrary,
d) / = eClU ; h arbitrary,
where c\, k\ and k2 are arbitrary constants.
The results of the classical symmetry analysis is given in Table 2.2 at the end of this
chapter.
For reasons stated in Section 2.2.2, we choose to ignore the cases
i) g(ux)=ux , f,h arbitrary
and ii) f(u) = 1 , g, h arbitrary. Also w e ignore the purely hyperbolic case
iii) g(ux) = l , f,h arbitrary.

Nonlinear Degenerate Diffusion 40
2.4.2 A Linearisable Class of Equations
From Table 2.2, the PDE
u'=!(/wi)+ftW (2-80> has a classical symmetry
P(t,u)±
where p satisfies puuf + puf + puh + pt = 0 .
This again indicates that (2.80) is linearisable, and by the hodograph transformation we
find that (2.80) is equivalent to
f(u)xuu + (f'(u) + h(u))xu + xt = 0 . (2.81)
Following the technique in Section 2.2.3, we find that the point transformation
J y/af(u)
x2=t
z = A(f(u))h>f7$dux,
(2.82)
with a and A constant, transforms (2.81) to
d2z dz
dxl + d72+uixi'X2)z = 0' (2'83)
where f (/'(it))' - 4 / » / ( u ) - Ah(uf - 8f(u)h'{u) )
w = a{ WF) /• (8 )
In particular now, we look for solutions to w = 0, i.e.
Equation (2.85) is a Riccati equation with a solution
hi = ~\f • (2.86)

Nonlinear Degenerate Diffusion 41
Hence, the general solution to (2.85) can be found by the change of dependent variable
h = h1 + - . (2.87) J
Substitution of (2.87) into (2.85) gives
t + fy = Tr (2'88)
Hence from (2.86), (2.87) and (2.88), we find the general solution to (2.85) as
1 2/~2 h = --f + . 1
J- (c constant) . (2.89) 2 J-^duA-c
So for functions h satisfying (2.89), equation (2.81) can be transformed via (2.82) to
d2z dz „ ,n. dx} + dx-2=°- (2'90)
We now consider an example with exponential source term, which is prominent in chem
ical combustion theory as the Frank-Kamenetskii approximation to the Arrhenius reaction
law (see [38]).
Example 2.7
W e solve d / PCIU\ s
ut = i-[ — + c i eC l W ; Cl > 0 , (2.91) dx \ ux ) 2
subject to the initial condition
x(u,0) =a ; (2.92)
(2.93)
a constant, and boundary conditions
x(0,t) =P
x(2,t)=1
where /5,7 are constants.
The initial and boundary conditions are incompatible if a / @ 7, but the solution
is consistent for all t > 0. This situation is well established in heat conduction theory [37].
Via the hodograph transformation, (2.91) becomes
eClUxuu - -cieClWxu -xt = 0. (2.94)

Nonlinear Degenerate Diffusion 42
Using the transformation
Xl = -le-c^/2
Cl (2.95)
Xi
x2
z
= —
= t
= e
dz
—e-Cl1
Cl
~ciu/2x
d2z
a/2
!
equation (2.94) transforms to
Using (2.95) our initial and boundary conditions (2.92) and (2.93) become
z(xi,0) = —— xi
Z\"c~i,X2J =P (2-97)
and z I e_Cl, x2 ) = je~Cl .
V ci J Taking Laplace transforms of (2.96) with respect to x2 and applying (2.97), we have
for p > 0,
(p-a) Z(xi,p) - p^Xl_Xl)Vp _ e(2X2-X1-x1)Vp)
(7 — a)e~Cl
+
py(2X1-X2-x1)y/p _ e{X2-x1)y/p^
(P-a) p(e(
xi-^AVP — e(xi+Xi-2X2)y/p\
(7 — a)e_Cl aci p(e(x1+X2-2X1)y/p _ e(xi-X2)y/pj ' "fy
(2.98)
Xi
2 2 where Xi = , X2 = e~Cl (2.99)
Ci ' Ci
and Z(xi,p) = C{z(xi,x2)} .
As Xi < X2 , so that |e(2*i-2X3)V5| < 1 , we rewrite (2.98) as
7( x (jg~«) 4\?UV) _pe(2X2-X1-x1)VP(l - e(2X!-2X2)Vp)
(7-o;)e Cl
pe(*2-a:i)v^(l - e(2X1-2X2)y/pj
(P-ot) (2.100)
(7 — a)e~Cl aci -xi
pe (x1+X2-2X1)VP(l - e(2Xi-2Xa)V£) 2p

Nonlinear Degenerate Diffusion 43
Expanding the first four terms in (2.100) in series form, we have
g-fci^/p 00 p-koVp °°
Z(xi,p) = -{fi - a) ^ + (7 - a)e-Cl E 71=0 ^ 71=0 P
OO
+ ( / 3 - Q ) E ^ - ( 7 - ^ - C , E ^ (2-101)
71=0 V 71=0 ^ Q!Ci
- xr-xi 2p
where /c0 = 2nX2 - 2nXx + 2X2 - A'i - xi ,
fci = 2nX2 - 2nXx + X2 - zi ,
k2 = 2nX2 - 2nXi - Xx + xi ,
and fc3 = 2nX2 - 2nXx + X2 - 2Xi + xi .
Taking the Laplace inverse of (2.101), we arrive at the following solution in terms of our
original variables:
x(u,t) = e^'2l -{fi- a) f>rfc (J±^ + (7 - a)e~^ f>rfc (^)
00 / u \ °° / 1 \
(/3-a)Eerfc -^)-(7-c)e-ClEerfc
n=0 \^Vt/ n = 0
(2.102)
where k0 = 2nX2 - 2nXi - 2X2 - Xx + —e~
ClU/2 , ci
fci = 2nX2 - 2nXi +X2 + —e'0^2 ,
ci
k2 = 2nX2 - 2nXx - Xx - —e~ciu/2 ,
Ci
k3 = 2nX2 - 2nXi + X2 - 2XX - -e~Clu/2 ,
ci
and where Xi, X2 are given in (2.99).
Figure 2.8 shows plots of (2.102) with
i) ci = 2, a = 2, p - 1, 7 = 4 and at times t = 0.01, 0.1, 1.0.
ii) ci = 2, a - 1, /? = 2, 7 = 4 and at times i = 0.01, 0.1. 1.0.

Nonlinear Degenerate Diffusion 44
(i).
(ii).
Figure 2.8: Solution (2.102) to equation (2.91), solved subject to (2.92) and (2.93).
In (i) ci = 2, a = 2, fi = 1, 7 = 4 WIV/I /im« r. = 0.01, 0.1, 1.0, and
in (ii) ci = 2, a = 1, /? = 2, 7 = 4 w/tft rimes t = 0.01, 0.1, 1.0.

Nonlinear Degenerate Diffusion 45
lOVt As erfc(x) < e x , the summations in (2.102) were taken to n = "" v " + 1,
A 2 — Ai so that the tmncated terms were negligible.
Although the Frank-Kamenetskii reaction term commonly leads to blow-up ignition in
finite time, despite the initial condition here being an intense heat spot, the solution remains
bounded between the imposed boundary values at all t > 0. The avoidance of blow-up exof Ci u)
is due to the large nonlinear heat diffusivity \—- at high temperatures u, effectively u2x
transporting heat away from the initial hot spot.

Nonlinear Degenerate Diffusion 46
Z O HH
I w o z o hH
H U &
c
Z
w 2 H
u HH
< rJ
u rH «
W J pa
HC CS O
3 O
on cs o CJ 3
-a CD
Pi
C/3
CO
<D
6 e >>
"sT ^
H ^
©5
.s
'5
lei
SO
II
H
II a
CM
-*.
S
*>|c§ H +
<&|<6 , « — s
e i i
<M -to
+
a
g
a
& £j • rH
. g J3
+ -©-
+ 3 rH
1 e -©-
tH
1 e
e ll
CS ^
1 1
c
r-l
+
+ c
CN ^-^
+
+
+ SO
II
"©-"O s
SO
- e -
II
CN
II e
c3
II a C3
•B rH l-O-
II
"©J
eh
cd
TS~ + SO
r-H
H II a CS CO
•3 cs CO
II
3 ^
C/3 CO
to
(0 jcS =5
2 + So
«-i I C3
1 II a
Ik
«H
o <+H
<s|£ e SO
1
^ l < §
s e
o II r-l
+
-©-
-$-a CO
+
a
<o cs <3
es CD
•3
<o
II
oh

Nonlinear Degenerate Diffusion
H ti
I CO
+
+ H
-©-
co
I .£3
-e-+ -e-C3
3 CS •B r—I
>>
So
H
•B • «-H
N ^
oo c oo
'-3 +
T3
I
^ ^
SO
H CO |<N
a cs CO •3
So
a cs •s
+
COH
a
H
a i>o
H
a «#
+ 00 CO 00
CO
oo cs rH
00
03 V3
c +
6 e +
-e- -©-
JS
£
IT -e-rT
e + so
II a
F -e-+ -©-+ ^—x rH
1 a + S
<~ ,_,s
a s -©-rH
1
e -e-•e-
C/3
a ©5
CO CO
+ cojcg a +
t
8 H
a
+1 o -tk a
CO co a I
a +

Nonlinear Degenerate Diffusion 48
3 S ••a
c o U Z O HH
I w to
o z o hH
H U P Q
Q Z
cn hJ -<
U hH
c« <!
U W rJ
CO CS
o •J3 3 'o on ~5i c o 3 T3 co
e/5
co 'fi CO
B e C/3
^
s
/^N
H
a s « — • * '
©5
e +
l| <3
es O 1
J
cs
II a
*i<g «> i«s.r ?i-"1 3 co
rr * « i o <0 OO ,
O 1 O (D '
^|c§
o o "Ik
O
o 3 Tk e co O
O
g H
^ !<§*> leg i
SO v_r-
^-^l-i
& u • rH
I
1 H
-1 a
£ £ J3
S ~©-+ so 3 0 1 CO II
O
Tk
3 3 CO
II
^
DO CO
ts
+ 3
s 1 1
co U I T J '
+ 3 a CS 1 co rH
1 cs
a 1 CN
II
J ^
+
3
e 1 CO
CO <0 rC
^—N
3, + SO 8 1
rH
a II H
8
a II «^C 00 oJ
*o + 8 | 1
1 - f
a CO
a i
t — i
+ 8 cs 1 CO
a
rH
1
"sT CN
1 CO
"sT 1
CN
II
^
CN
CO |CN p,
I — 1
Tk a
+
8 1
a
"a + 3
+ a I II
2 ^
rH
II a

Nonlinear Degenerate Diffusion 49
V cu 3 C •J3
§
Z
o hH
1 w to
o z o hH
H U D Q
ft
Z < cn H to
tx CO
5 hH CO
U i-H
to rJ
PQ
00
3 o 3 r—*
o on 3 O 'tf
o 3 T3 rt
^3
+ -<Ks
I
a CO CN
I a CN
I
3,
+ «I a I
-• I a
+ a
.a.
CO |CN
II a
CN
2 <D rC ^
li
-G- " 8 ^ -G- -©-CN g 4- ~e-
^ a ^ 1 .
3 rH
1 8 -o-cs a
a 8 -e-a CN
3
$ SO
a ^
c 2
<o
Tk a
+ 8 I rH
%
+ a ^ I M -H CJ I
So
-e-
(0 .3
n|m I
a 3
"E
I
H
CO
I H
c/3 CO
•n *-> (0
6
e C/5
a
>|£
so
"a" I CN
cs SO CN I a cs SO
+
SO
a CN
I
CO
8 I
cs
a
CO
a I
CN
I
+
CN
Tk a
7h
co
CO
CN
CO
a
H
a
co CO nKn
I
a H Ico
+ ^l-O cum
a
•vf/n
a

Nonlinear Degenerate Diffusion 50
no co 3 B TS 3 O
u Z o HH
I to to
o tn
Z O hH
H U P fi
Q Z < cn to rt
H to
cn P
hH
cn cn P u 1-H
ci to
p tt
CO 3 O •tf 3 rH
o cn ~~V)
3 O tf
o 3 rt
co CO •fi CO
e B cn
a
cs
+
^|c§ a
SO
4!
"O
+ 8
.3 4—>
o to
^
U CO J3
CO CO
So
H CN
H cs so
+ a 3
p — t
so
H CN CS
'a'
T
+
(-1 CO
a <o
IT 3
i — i
-kN
I so
H
CO
rJ
CO eg
a 3
SO
+ ^>l$ 3 +
CO CO
a 3
p 1
a CN
3 C
CO n|<M
!
a «-ikN
i so
<U CJ
H
CO co a a
SO
+ CO a
co a CN
<o
CO 3 8
I
H CO
<o cs O
+
cs SO
+
a oo 3 O
o
1 •g
d "O Cj"
cf CO 3 CO r3
CO SO CN
a CO
3 8 HJ

Nonlinear Degenerate Diffusion 51
ON
x> c4 Z O hH
I o to to
O • cn .« fi
H to
cn P <
U hH
cn cn < ci to
p n
*—> C O
B B C/j
-a
*•-»
©5
^ | c §
fr
tf .rH
rO
fr cd tf • rH
•e cd
& H *-> X) J3
^ | c § H +
"a i
CN so
+
a
rH 1 1
8
a
8
a
+
rH
y
a CO r-H
a SO
1 <*|c§
3 53 O
es si CJ IS
+ £ r-i
CO
3 0 CO
3 a CO cs
3
e
<*>|c§ H +
CO
rH
+
1
$
"S 1 a + rH
CJ SO
+ CO
- i—i
+ a * „ ,-
a
a co "Hi 1 a + rH.
CJ
PH
r. Tk
-i? + rH
O
r*
u
a
i-H
+ 1 Tk a
8 H
a rH
o
HJ Ci
.« r-i 1
1 8 + ^ ^L
+ ll
so
CO
EH
+ CO
EH
1
a CO ,—s rH
1 a + CJ
l-H
Tk a + r-i
CJ
a" i-H
r4
U
a
SO
+ <*> eg
a i i
i-H
1 c
H
Tk a, »."
a rH
8 1 ft.
a

Nonlinear Degenerate Diffusion 52
CO
rH I
£ 3 QJ
CO H CO
+
+
+ ^|co
SO
a
+ a
co a co
a Ji
CO
* < 8 +
CO i—i
+ a
a co CJ
CO
'££ I r-i
CJ
H CO i—i
+ ^
H
+ CO so
CO
CO ' a co
CO H CO H
p,
+ «a 3
PH
+ rH
a ••-»
3 PH
rH
e 3 3
P, CO CO <3
.23 •-*—» cd oc CO
.3
CO I « CO a s-T
a cs
+ *a rH
r «
o Tk cs
Tk PH
a rH
a cs •* O
+ Tk a rH
a rH
-ie
-ie cs
-ie
cd u
.r-i
cd
8 I ft.
a
o CO rH
<J
<o
cd
cd
rH H
a | a

Nonlinear Degenerate Diffusion
T3
3
JG tf C O
U $! •
<N
z o h^
H 3 a to to
O cn to
2 H u S 2 cn P
U hM
cn cn -<
P • • d
c$ to
p tt
H
&
s Es r^
cn
-
-
Oi
<*I«S 1 1
EH
s~-^ CN
1 rH CJ
CN
1 rl
0
a CN +
H EH
^ ^ CN
1 rH CJ
CN
+
E-i
cs
CN"
1
o rH
a cs 1 i-H
a CN
-r feh H 1
+ •
EH
•j-
co
^ EH a 1
a CO s—v CN | 1 r-i
CJ
a
ri
u
a
I u T CO
o + •—> cs
I u
^co
+ II so
EH"
CO
c
CN
Tk i-H
*l"« rH
a so <N 1 •vio "I"M
rH SO
es ~ so _,
1 SJ
+ CN
w~ Me ^
+ 7 + a + Z so _3 _i
CN +
I ' a ,A
I a a 4o 2 3 ^ a
3 -
r* C
a so
1 H
"a -
-H>
-H
a -< *
. co
_ 1 i-H
a CN
h
cg
V , +} 1
H
-
a + - < *
_. a CO |co 3
•*•» a
a CO
CN
+ ^ 1 a ^ CO i ^ »
a 3 'a S O
a
es
a
^|co CO
1 CO
eo r-i
1
a
i-H
a
+ i—i
H
CO *4
i-H
a CO
V
eg
1 CO
eo es
a I
a
CO
a
^ I c o eo HJ CO
eo rH
1
a H Ico
eo — HJ CO
eo es
a 1
H§ 2 "to* CN
+ SO CJ
+ ^>|co es so CJ CN
+ Jcg ^
a
2
J **
i
ed U i -4—»
1
o 11 r-H
a
3*
0<
1.
i-H
a
CN
1 CJ
OO
eo CC CO
•c Cd C/j
Cr
r-
co rC Z
CJ
1
^|co "d ^
*>!<§
2 es
f-H
0
+
es
rr
1 , **"» 3
T!T* a
CS rH
CO CN
•

Nonlinear Degenerate Diffusion
T3 ey
3 C 'tf C
o U ON
c-cl Z O hh
1 o to %
cn to
cn P <
U hh
cn cn <
P U • • to
p n
CO
E B r>1
cn
•+->
Oi
CO CO
I
^>|cO SO
CS l-H
+
CO
SO
fr-CN
H SO
fr.
CO
CJ CN
+
CI
I so
I 5-5
+ es
so
<*|cg
+ ^|CN
.O CN
CJ CN
+
*•-»
so
CH
coco rH
+ es cj
es
CH
a CN
cs" u
r* so ^fe CO 7:
CS
M es
fr. *d< CN
CS
es
CO
CO CO
I
es
cj m -r.
feeT 5 o *- CL
co r« Tf
CO
CJ CN
HO ~V +
J ^ ^
so eo
so eo
fe,
es
es
es «s *•-S: co tr SO Cl Ct,
I \.
rt
. *» **r- «^
« i £J "^ cssi ii
i ^*t?^
CH ^O
CO so Ui cs
OJ rC fe
CJ Tf
+ cj CO fe
es 00
+
5 eo
Tf CO
eo cj SO
I I : s ^ I
es
eo ej
CJ .so
co fr-I-H es
+ *•-» CN cso CO
5: es fr- «•-»
es es n es ^ f e
00 Tf
^ I so '
CL es
*» 4-co • rH SO
I *•-»** «S-^ *~
A ? fr- ^ c s cN es es ^ i ^ cj eo I eo es «HT>
es **r»Cc, oo'
^ CO C .
-y I "v. *--, i: cs. ci CJ
co T CJ fe
CJ «^
CL IO
«. es
"V- fe CO
* ^ CN
r>-I
fr-00
CN
co
I 'es
^jcs
"" eo
^ > CO es
u fe,
CN Tf Tf
co
I CN |
fr- « *~ CJ
so
fr-CO
-PJ
fr. CO
CJ
es
3 C
o 3
a rt on fr.
£ CO
3 cd
-a 3 cd
CO CJ CN
+ fe CJ
CN »T~
fr- I es CO
CN
I
e CO

Nonlinear Degenerate Diffusion 55
T3 ey 3 3 "tf 3 O
u ON
c« cj, Z O hH
1 i cn to
2 u 2 ><
cn P U hH
cn cn <
P U • •
c« to
p
n
E E cn
Oi
CO CO
cs -ie
a EH
I a EH
I CO
o I + J» ~<o EH ^
+ + EH II
+ g a EH EH co
*-—' JH
I - 1£ |CN £
+ EH-
+ ^|cg
a E^
cs
+ a
CO to
cs
CO
eo
•i
"I cs
CO
CO
I
cs
-ie -&e i
+ a
CO H CO
es r^
I
es CO CO I co
H |CN «.;
+ 7 cs
co
co
I
a H |CN
+ es , _j
cl^lcg +
CO CO
CO
CN
I
I
CO
cs -Sc!
+ a
cs
-s<e CN
CO CO
cs
3
cs
a Tt*
.SO
Tf
H CS
00
+
cs so
+ CO a
CO so
a CN
H ^IcSco I H CO
I
^
I cs ^-y to -ie °* H | o o H Ug
I TT
<*|c§
<ol<§
•s
•i
cs
-ie CN
X I
es
-&e
cs

Nonlinear Degenerate Diffusion
r—S
-D ey 3 3 •tf 3 O
ON
c4
Z O hH
1 to fe cn to
2 H to
S >* cn P < U hH cn cn <
P U • • •
to p tt < H
H—»
CO
E E >->
on
-a
*+-»
Oi
• -.
<oJJg es -Ae SO 1 rH
a
1 cofcB a •«
H^Via + ^IcO
cs SO
+ <*|cg 1 *-
SO
a CN
es -ie
a
^Ico es
ri
s-
H c
_
-
CO s-
: *l'<8 es
1
a .£H|CN
^ +
A ^ CO |
^
1
cs Jc CN
•£ II rH
a
a
CO
H CO
CO
es
N ^ I c g
eg r 3
cs -ie CN | es 1
* II rH
a
a
*l'«8 ^~
H
es y^^V »— 1
1 1
^ r-i
a r-i
1 *H
J: a +
co' s
H CO
a l
CO r
r a CO rH
1 i-H
-ii
i-H
H 1. ^ -ie
rH
a
+ rH
H 1 S O
r-i
-Se^ | •
+ «>|c$ CN
+ CO
so
CM
S3 CO r—i
1 i-H
^
~ i-H
CN i 1 fH
._, — 55 r^
» Tk 7 e
rH
-ic
1-H
+ rH
J£
a

Nonlinear Degenerate Diffusion 57
T3 ey 3 3
•-C 3 O
u ON
cj, £ Z O hH
I o to to
o cn to
2 H to
cn P <
U hH
cn cn <
P U • • C* <N to
p tt
& CO
E E cn
•
-a
*•-»
Oi
«^fe
3H i
so
+ CO
rH
<3 a CO
a co i-H
+ 1 — t
Tf'
^
a
rH
+ lH a
^|co
i-H
1 r-l
a CN 1
CSrH
a
7 r-8 1
8
a SO
+ hH
r.
8
m
a CO
i-H
+ r^
a r-i
a
CO
rH
+ tH
CN
H
+ *>|cg
SO -" 1 -r a a n ci
a I
CN
1 rH
a
rH
a CO
II r-i
-Sc
.
^|co i
— < 8 c
1
H
+
iX
i
3
•-H
a CO
f
^|cg pH
I r-
0 P ' cs
3 1
a i i
^ rH
Tk IhH
-ie .
CO • rH
i-H
Tk rH
a,
*'fe i i
so |CN
t|r il8
a i—t
a
CN
i-H
+
Tf" • i
H
+ es SO
+ ^|cg
SO
a
rH
a
i—i
+ lH
a
rH
• a 1 CN
a i 1 i
i-H
+ iH
a
CO
H
+ lH
a
CO
rH
+ a co CN
CJ ZH
e rH
1 a SO 1 1
i-H
Tk lH
-ie r-i
a <D • H
i 7 ? Tk
rH
a
*>|« so
r co
3
I a 1
a co rH
+ iH
CN
a

Nonlinear Degenerate Diffusion 58
ey 3 3
• wm H-l
8 O
U ON
z o hH
B to to
o cn to
2 H to
§ cn P <
U-hH
cn cn <
P U • • <N
ci to p »
oo
Oi
CO CO
cs -Sc
rH
-Sc
EH
+ rH
^C
EH rl
Ji
3
+
CO CO
EH 1-5
o Tk es
-Sc
cs
Jd
EH
+ cs -Sc CSrH -Sc EH Ji
3 co
H
cs -SC r^
a iH
Ji
3 CO CN
+ *>|<S ks H
CO
o + Cl
^ Ji <o cq + ^
II so
EH
2-O rC
o
es -Sc
4-SO
+
CN
CS
-sa
+ 3 r-t
Ji CO
-Sc
I Tk
.« CO
CO H CO
es
-ie rH
-Sc H
I CO CO
3 CO Cl
Ji
-£ + Ji
3 CO I |CN
cs -Sc
CO CO
Ji
Ji
Ji 3 CO
I
CO H CO
cs -SC
-sa EH
I r^
^a
Ji 3 CO
I Ji
<o
o ti + I * es -*
-ie £ CN—• -
-sa ^s Ji 3 CO
eo
+
Ji 3 I CO CO
H -sa CO
+ *>|« ks
+ ^|cg Enl-sa
I
CN -se + Tk s cs II
Jt ^ rH
CO I ** I CO
-sa
I
^|cg CN
•sh CO
CN
CO
CN -sa co
cs
-sa
+ 3 r-l
Ji CO
o Tk cs
-sa

Nonlinear Degenerate Diffusion 59
CO
E E cn
* l < 8 + H
-ie Ji 3 CO
H Ji 3 CO r-i
-ia CN
|co *U 1^ <u es s
+ *>|cg SO I rH CN |-i:
I
^ I c g *
CO
I
i CO
H |CN
«l«8 so
CO
o + Ji CO
CH
+
CJ
.s
^|cO
fH I i-l
a l-sa
Ji CO CO
CN -ie CO
cs
-sa
cs
-s<e
+ CJ
Oi

Chapter 3
Methods of Conditional Symmetries
3.1 Introduction
In the previous chapter w e demonstrated the classical Lie group method for finding
symmetry reductions of PDEs. In this chapter w e concentrate on two generalisations of the
classical Lie group method; namely the nonclassical method (or the method of conditional
symmetries) and the method of generalised conditional symmetries (both of which have been
described in Chapter 1).
In Section 3.2 w e perform a nonclassical symmetry analysis on the nonlinear reaction
diffusion equation
0t = V.[D(0)V0]+R{0) (3.1)
for R ^ 0. In this nonclassical analysis w e find some strictly nonclassical symmetries which
do not emerge from the classical analysis. Each of a list of symmetries, including all possible
nonclassical symmetries is used to effect a reduction of variables and in several cases we
complete successive variable reductions and achieve new explicit solutions. For example,
using a nonclassical symmetry reduction, w e construct an exact solution with Arrhenius
reaction term.
Interestingly, although the nonclassical method aims for many more solutions than those
obtainable by the classical approach, for many PDEs, all invariances are essentially classical.
Indeed in [39], w e found that every solution to a linear second order constant coefficient
P D E is invariant under some classical symmetry beyond linear superposition. This result
prompted us to inquire about the nonclassical symmetries of the more general nonlinear
diffusion equation (3.1) with R = 0, i.e.
0t = V.[D(0)V0]. (3.2)
By taking a new approach whereby w e do not need to solve either the classical deter
mining equations or the nonclassical determining equations fully, w e show in Section 3.3 that
all the nonclassical symmetries of (3.2) are essentially classical with one minor exception

Methods of Conditional Symmetries 61
when T ^ 0. In this new approach which we hope will be useful in a wider context, in many
cases the classical determining relations may be directly deduced from their nonclassical
counterparts, which originally take a quite different form.
In Section 3.4, w e take a particular example of equation (2.79), namely f(u) = up:
g(ux) = U™ and h(u) = u(u —V)(u — c) where p, n, c are constants and n 0,+1, and
state the results of its nonclassical symmetry analysis. In the case p = 0, n = 1, w e know
that the cubic source term leads to strictly nonclassical symmetries [40], and hence w e were
motivated to consider more general constants p and n.
Finally in Section 3.5, w e consider two cases of equation (2.1), namely g(ux) = e~Ux
and g(ux) = u~3 , so that the diffusivities decrease faster than u~2 (the relevance of this was
discussed in Section 2.1). O n these equations w e give the results of a nonclassical symmetry
analysis as well as illustrate the method of generalised conditional symmetries.
3.2 Nonclassical Symmetry Analysis of Nonlinear Reaction-Diffusion Equations in Two
Spatial Dimensions
3.2.1 Background
Nonlinear reaction-diffusion equations of the form (3.1), with nonlinear diffusivity D
and nonlinear reaction rate R, have long generated considerable attention because of their
wide variety of applications and because of their interesting mathematical properties. Ap
plications include combustion theory [41], propagation of nerve impulses [42], population
dispersion [43], water flow in soils with plant roots [20], and heating by microwave absorp
tion [44]. The solutions of these equations display interesting bifurcation properties, possibly
with blow-up or extinction in finite time ([45],[46]).
In many practical problems, reaction-diffusion equations must be solved numerically.
However, there are some model equations for which exact solutions are known. These
solutions not only provide direct insight [47] but they are valuable bench marks against
which numerical schemes may be tested. Many of the known exact solutions are similarity
solutions which result from reduction of variables in (3.1) following consideration of invariants
of classical Lie point symmetry groups [48]. Although for various initial and boundary

Methods of Conditional Symmetries 62
conditions on various geometrical domains, the solutions to (3.1) may not be unique, similarity
solutions tend to be stable and they often agree at large times with solutions to physical
boundary value problems [49].
In one dimension, a full classification of the special forms of (3.1) admitting Lie point
symmetries was carried out by Dorodnitsyn [50]. The infinitesimal symmetries were used by
Hill et al [51] to construct exact solutions for models of microwave heating. The full classical
Lie point symmetry analysis has been extended to two and three dimensions by Galaktionov
etal [48].
However, as the number of available similarity reductions for equation (3.1) in one
dimension was greatly extended ([40], [52]) by using the nonclassical method, w e were
motivated to perform a nonclassical symmetry analysis on (3.1) in two spatial dimensions.
Although the strictly nonclassical symmetries found were few in number, from those that we
did find, w e were able to construct interesting new solutions.
3.2.2. Preliminary Simplifications
Our analysis could be generalised to include the case of no reaction (R = 0 ) . With the
aim of conciseness, w e choose to omit the detailed construction of symmetries of reaction-
free nonlinear diffusion equations. Focussing primarily on the effects of nonlinear reaction
terms, w e do not elaborate on special symmetries of (3.1) when the reaction term is linear,
R = a0 + fi with a, fi G R . (3.3)
For consistency, in this work w e choose not to analyse the symmetries of reaction-diffusion
equations that can be transformed to reaction-free nonlinear diffusion equations by an el
ementary change of variables. Of course, if a symmetry analysis of these transformable
equations were carried out in full generality, there would be no point in omitting the equiva
lent class of nonlinear diffusion equations from our analysis. In fact for power law diffusivities
(D = k 0 m ) , a reaction term of the form (3.3) may be transformed to zero by the elementary
change of variables [27],
0 = e~at0, i=emat (3.4)
0t = V • (—W ) . (3.5)

Methods of Conditional Symmetries 63
This is an example of a reaction-free nonlinear diffusion equation, which we have already
chosen to ignore.
W e simplify (3.1) by applying the Kirchhoff transformation [53],
u= f Dd0 (3.6)
F(u)ut = V2« + Q{u) (3.7)
where F(u) = l/D(0) and Q(u) = R(0) . (3.8)
Compared to the expanded version of (3.3), the equivalent equation (3.7) has fewer nonlinear
terms and its symmetry analysis is easier. In terms of u, the neglected case of linear reaction
rate is
Q = a Fdu with a E R . (3.9)
In this investigation we will ignore time independent versions of (3.7) with F = 0 . W e
concentrate on parabolic rather than elliptic equations.
Applying nonclassical symmetry analysis, we now search for infinitesimal symmetry
operators
r = T!+X— +Y— + U— dt dx dy du
that preserve the governing equation (3.7), along with the invariant surface condition
Tut + Xux + Yuy = U , (3.10)
where T, X,Y and U are presumed to depend on t, x,y and u.
Whereas the classical symmetry analysis leads to linear determining relations, the non-
classical analysis leads to a system of nonlinear partial differential equations for T, X, Y
and U ([7], [54]).
3.2.3. Nonclassical Symmetries
In the case T ^ O , without loss of generality, from (3.10) we may set T(x,y,t,u) = 1.
The nonclassical method applied to (3.7) gives rise to the following determining equations

Methods of Conditional Symmetries 64
for X(x,y,t,u), Y(x,y,t,u) and U(x,y,t,u):
Xu = Y^ — 0
C7 = Aw + B
XX —Yy=0
{Xy + Yx=0 (3.11)
X W + (Xt + 2XXX)F + 2UXU = 0
YUF' + (Yt + 2YYy)F + 2Uyu = 0
, F(u)Ut - Uxx - Uyy + 2F£/Yy - 2QYy - Q'U + QUU + F'U2 = 0
where A and B are functions of x, y, and £.
From (3.11)i, we have that X and Y are functions of x,y and £ only.
From the Cauchy-Riemann relations (3.11)3 and (3.11)4 we have that X and Y are . r . d2X d2X n , d2Y d2Y
conjugate harmonic functions satisfying -—-- + -^-j- = U and -^ + -^ - u .
In finding admissible functions F(u) and Q(u),sothat (3.11)5, (3.11)6 and (3.11)7
are satisfied, we consider the cases
X i- 0 y^o,
X = 0 Y^O,
X^O Y = 0,
X = 0 Y = 0,
separately.
I. X^O. Y^O
In finding admissible functions F(u) that satisfy (3.11)5 and (3.11)6 , we consider
separately the cases A = 0 B^O,
A = 0 5 = 0,
A^O B^O,
A^O B = 0,

Methods of Conditional Symmetries 65
where U = Au + B . Noting that throughout the following, K and c denote constants,
we tabulate these admissible functions F(u) in Table 3.1:
TABLE 3.1
Condition
A = 0,B^0
A = O,B = O
A^O,B^O
A^O,B = O
F
K>-c,u _ Xt+2XXX _ Yt+2YYV n c U1 — BX ~ BY
i) arbitrary if Xt + 2XXX = 0
and Yt + 2YYy = 0
ii) 0 if Xt + 2 X X X ^ 0
or Yt + 2YYy j- 0
i) K, Ax = =f(Xt + 2XXx)
Ay = =f(Yt + 2YYy)
ii) g + c 4 ( w + ci)-C2, c 2 ^ 0
iii) c?,ln(u + c{) + C4, c2 = 0
where -B o - X*+2XX* - Y*+2YYv wnere ci — A, c2 — Ax — Ay
and c3 = =ffi = jy^; C4 arbitrary
As for A 0, B 0 but with ci replaced by 0 .
W e now consider each of these conditions separately. W e note firstly that when the
arbitrary constant(s) in the computed functions Q(u) were set to zero, this led to the neglected

Methods of Conditional Symmetries 66
linear reaction rate, and so we do not include those cases here.
A = 0, B ^ 0
Substituting F = Ke~ClU , where
Xi + 2XXX Yt + 2YYV ci = ^ g ^ = ^ y ^ (3-12)
and U = B into (3.11)7 yields
Q> + ?%LQ = e-cit- /BtJr + 2.8Jiryy-ciJC-.92\ _ /Bxx+gyyN
This is a first order linear differential equation for Q which can be solved in general. From
the form of the solution we find that Q can be a function of u alone only if the coefficients
in this equation are constant. That is,
Q' + c2Q = c3 + c4e-ClU (3.13)
where
C2 = ^,
ca = - (B" + M , (3.14)
and C4 = KBt + 2if£Yy - ciKB2
B
are constants.
Hence, there are four possible solutions for Q(u) and for X, Y and f? depending on
ci and C2 :
i) c2 ^ 0, c2 ^ ci
From (3.13) we have
Q = ^ + (—£*—) e"ClW + c5e-C2U
c2 \c2-cij
where C5 is an arbitrary constant.

Methods of Conditional Symmetries 67
As Xt + 2XXX = ciBX and B = ^-Xx , we have C2 "LX
Xt + kxXXx =0, (3.15)
where kx = 2 ( 1 - — J 0 . (3.16)
Similarly
Yt + kiYYy=0. (3.17)
with A;i as in (3.16).
Solving (3.15), (3.17) with (3.16), and using (3.11)3 , (3.11)4 , we have (see Appendix
1) that
X = xf(t) + yM(t) + L(t) (3.18)
Y = y/(t) - xM(t) + J(t)
where /, M , L and J are functions of t. Also, as -
have
X = N(x,y)Y
BX = we BY
(3.19)
where N is some function of x and y. Hence from equations (3.15)-(3.19), and with
the requirement B ^ 0, we obtain
x ^x + Py + >yi Y=y-fix + 72
kit + c ' kit Ac
r, 2 1 B = — •-r-——; P,7i>72,c constants
c2 kit + c and Q = c5e~
C2U .
ii) c2 7^ 0; c2 = ci
It can be shown that this case reduces to the neglected linear reaction rate, given by (3.9).
iii) c2 = 0, ci 0
From (3.13) we have
Q = — e - C l W + c3W + c5. -ci
As c2 = 0, we have from (3.14) i, that X = X(y, t) and Y = Y(x, t).

Methods of Conditional Symmetries 68
From (3.12)
so that B = B(t) and so c3 = 0. For K ^ 0, we have from (3.14) 3
*t-%B = ciB2.
Solving this Bernoulli equation, we get
c4 for c4 0 , B = C4 ,
—CiK + CQC/^X K1
and for c4 = 0 , B = . c6 — Cit
Now using (3.11) 3 and (3.11) 4 , we have
X = yh(t)+j(t)
and Y = -xh(t) + g(t) ,
and as X = N(x, y)Y for some function N of x and y, then either
a) X = (y + oc)h(t), Y = —(x + fi)h(t); a,P constants or
b) X = j(t), Y = nj(t); n constant.
For c4 ^0, if X = (y + a)h(t), Y = -(x + p)h(t), then from (3.20) we obtain
Ht) = ——£ > —ci K e * + c4C6
where c8 is an arbitrary constant. Also if X = j(t), Y = nj(t), from (3.20)
eg
—ciKexz +c4C6
Similarly for c4 = 0,
either x =*&+£, y=-<»(* + fl CQ — Cit CQ — Cit
v c8 v n.c8 or X = -, Y = CQ — Cit' CQ — Cit
where B = , and Q = C5 . CQ - Cit

Methods of Conditional Symmetries
iv) ci = c2 = 0
This case reduces to that of the linear reaction
considered further.
A = 0, B = 0
Substituting U = 0 into (3.11)7 we have
-2QYy = 0
so that either Q = 0 (inadmissible) or Yy = Xx = 0. Equation (3.11) then implies
Xt + 2XXX=0, Yt + 2YYy = 0. (3.21)
Since Xx = Yy = 0, from (3.21), we have
X = X{y), Y = Y(x) .
Hence from (3.11)4 , we have
X = ay + Pi, Y = -ax + p2 (3.22)
where a,fii,p2 are constants. In this case Q(u) is arbitrary.
A j- 0, B ^ 0
(a) F = K, an arbitrary constant.
In this case A(x,y,t) must satisfy
Ax = ^-(Xt + 2XXx)\
Ay = ^f(Yt + 2YYy).\
Substituting F = K into (3.11)7 we find
Q'(Au + B) + Q(2Yy -A)= u(KAt - Axx - Ayy + 2KAYy)
+ (KBt - Bxx - Byy + 2KBYy) .
69
diffusion equation, which will not be
(3.23)
(3.24)

Methods of Conditional Symmetries 70
As usual, we neglect the linear case Q = au + fi with a/0. Equation (3.24) is
a linear differential equation for Q as a function of u. From its general solution and
from the fact that Q is independent of t, x and y, we deduce
B
OY — A
th-A = C2, (3.25) i\A.t A-xx Ayv T ZJ\A.YV
and —— = c3 AT.
with ci,c2 and c3 constant. Hence, equation (3.24) simplifies to
(u + ci)Q'(u) + c2Q = uc3+cic3 (3.26)
for which there are 2 possible solution forms, depending on the value of c2 :
i) ca^-1
From (3.26) we have
Q = (T^T) (W + Cl) + c4(w + ci)"C2 • (3-27)
From (3.25)2 we have A = j^Xx giving
Axx + Ayy = 0. (3.28)
Hence from (3.25)3,
At - |U = -(c2 + 1)A2 .
Solving this Bernoulli equation with (3.28) and then substituting into (3.23), and using
(3.11)4 gives
1 c3=0, A (c2 + l)t + a
X - (1 + C2^\ X + 7iy "i"l2 2 J ((c2 + l)t + a) (1 + c2)t + a
Y - f1 + cA y + (-^ + 73) "V 2 y((c2 + l)t + a) (l + c2)* + <*

Methods of Conditional Symmetries 71
where a is constant; and so
B = ci
(c2 + l)t + a Q = c4(u + ci)" -c2
ii) C9 = - 1
From (3.26), we have
Q = c3(u + ci) ln(u + ci) + c4(u + ci).
As c2 = -1, from (3.25)2 , we have X = X(y,t) and Y = Y(x,t). Using (3.23)
and (3.11)4 we find
AXy = Axx = A-yy = 0. (3.29J
Using (3.29) with (3.25)3 , we have
^-t A = (ax + fiy + 7)e * .
So now using (3.23) with (3.11)4 , we get for
c3^0,
and for c3 = 0 ,
— 2 c t 22.+
X = e K + 7iy + 72 c3
Y = e* -7ix + 73 c3
,, -2 X = —erf + ey + 71
Y = ^-/3i-ez + 72,
where a,/?,71,72,73 and e are constants.
(b) F=g+c4(^ + ci)-C2
where ci
C2
and c3
5
I' Xt + 2 X X X Yt + 2YYy
AX AY 7^0,
AX AY
(3.30)

Methods of Conditional Symmetries 72
Substitution of F into (3.11)7 gives
(„ + Cl)Q> + Q (^LZi) = („ + Cl)"«« (^ + **AY,-<**#\
+ (u + ci) __ -A* -"Lxa; -Ai/t/ "T 2-* A j t C2
l4 -fixx -^-yy c2
A (3.31)
W e can solve the linear O D E (3.31) for Q and since Q depends on u alone the
following must be constant:
2Yy-A
AtC4 + 2c4AYy - c2c4:A2
_
•£At — AXX — Ayy + 2-^AYy
C5 ,
C6 ,
= c7
Hence, (3.31) becomes
(3.32)
(u + ci)Q' + Qc5 = c6(u + ci)_ C 2 + 1 + c7(u + ci) (3.33)
for which we have 3 possible solutions depending on C5 and C2 :
i) CK ^ C9 - 1. CR ^ -1
From (3.33) we have
Q = CQ
c5 - c2 + 1
Using (3.30)2, (3.32)i, we have
-C2 + 1 j_ c 7
c5 + l (w + Ci)- C 2 + 1 + - T ^ - T ^ + ci) + c8(u + ci)~
C5
Xt + A;XXX = 0 1
where k = 2 1
Yt + /cYYy = 0 C2 Vo
c5 + l.
and which, for non-zero A and 5 , has the solution (see Appendix 1):
x + fiy + 71 ^ y- fix + j2 A- —
2
C5 + l
C
1
Art + c '
Y =
B =
kt + c 2ci 1
C5 + 1 fct + C'

Methods of Conditional Symmetries 73
where /3,7i,72,c are constants. Hence c3 = 0, and substitution into (3.32) gives
ce = c7 = 0, so that F = c±(u + ci)_C2 and Q = c8(u + ci)~
C5.
ii) CR = —1 so CR ^A o — 1
From (3.33) we have
Q = — (u + ci)_C2+1 + c7(u + ci) ln(w + ci) + c8(u + cx). —c2
Using c5 = -1 in (3.32)i, gives X = X(y,t),Y = Y(x,t) and so A = A(t) and
c3 = 0. Using C5 c2 — 1 gives Xt 0 and Yt 7 0 . We now have 2 possible choices
for X, Y:
either a) X = (y + 7i)M*)> Y = -(x + 72 )M*)
or b)X = j(t), Y = nj(t)
where 71, 72, n are constant.
Using (3.32)2 we have for c4 0,
f a w~t ifce^O A = I -c^4+ac6e
C4 (3.35)
I ^ ifc6 = 0,
and from (3.30)i; 5 = ci • i4. Using (3.34a), (3.35)i and (3.30)2 ,
Pi(y + n) for CQ 0 X =
OLCQ — c2C4tec^
Y = -^1(^ + 72)
ac6 — C2C4ec4
Also, using (3.346), (3.35)i and (3.30)2,
Pi for C6 7 0 X =
I** ac6 — c2c\e
c±
Y = v£ acQ — c2c±e
c±
Consequently F = c4(w + ci)
C2 and
Q = -*-{u + ci)-C2+1 + c8(u + ci) . -c2
(3.34)
(3.36)

Methods of Conditional Symmetries 74
Similarly,
forC6 = 0 X = &±&, Y=-f + f),
P - c2t fi - c2t a na
or X = — , Y = fi — c2t ' fi- c2t
If C4 = 0, we can establish F = 0, which is inadmissible.
iii) CR = Co. - 1, CR ^ —I
In this case we recover equation (3.9), signifying the linear reaction rate, which we
choose to ignore.
(c) F = c3ln(u + ci) + c 4
where ci = B/A , X t + 2 X X X Yt + 2YY y
C 2 ~ — 4 X = AY = °' (3-37)
and C3 = inr =-jf-Substitution of F into (3.11)7 yields
Q'(Au + B) + Q(2Yy - A ) = u\n(u + ci)(c3At + 2AYyc3)
+ ln(w + ci)(c35t + 2£Yyc3) (3.38)
+ (u + ci)(c4Af - A x x - Ayy + 2AYycA + c3A2) .
c3 = 0 is a special case. However, in effect it is the only case, which we establish by a
contrapositive argument. First assume c3 0.
Equation (3.38) is a linear equation for Q, which may be solved in general. Since Q
must be a function of u alone, we deduce that the following must be constants:
2Yy-A = c5 ,
c3At + 2AYyc3 A
A
CQ , (3.39)
c4At - Axx - Ayy + 2AYyc4: + c3A2
and = C7 .
A Equation (3.38) then becomes
(u + ci)Q' + Qc5 = c6(u + ci) ln(u + ci) + c7(u + c{) (3.40)

Methods of Conditional Symmetries 75
for which we get 2 solutions for Q depending on c5 :
i) CR * -1
From (3.40) we find
_ ( (u + Ci) _ , . (u + Ci) ] C7 . . . , „
As C2 = 0, as in previous calculations, we find that for non-zero A and B,
(3.41)
x _ x + fiy + 71 ^ y - /fo + 72
~ 2t + c 2t + c " '
A = • , B = ci- A, c5 + l 2t + c '
where /?, 71,72, c are constants. Therefore from (3.37)2 and (3.39),
c3 = c6 = c7 = 0 giving
F = c4 and Q = c8(u + ci)'05. (3.42)
ii) cR = -1
From (3.40) we find that
Q = -y{u + ci)(\n(u + ci)) + c7(u + ci)ln(u + ci) + c8(u + ci).
Using (3.37)2,(3.39)i and (3.11)4 we find
X = Ay + 7i, Y = -Ax + 72, (3.43)
where A, 71,72 are constants. Assuming c3 7^ 0, from (3.39)2 , we have
A = G{x,y)e%t . (3.44)
However, using (3.43) and (3.37)3 with (3.44) we obtain
A = Ke* , (3.45)

Methods of Conditional Symmetries 76
having established A = 0; but on substitution in (3.39)3 , we find c3 = 0. Therefore
A = A(t) and from (3.39)3
A = fiec* with fi constant,
and so F = c4 and Q = c7(u + ci)ln(u + ci) + c8(u + ci).
n. X = 0, Y j- Q
From (3.11)3 and (3.11)4 we have Y = Y(t). Also, from (3.11)5 we have A = A(y,t).
In finding admissible functions F(u) that satisfy (3.11)6 w e consider the cases
A = 0 5 = 0,
,4 = 0 B^O,
A^O B^O,
and A^O B = 0.
W e tabulate the admissible functions F(u) in Table 3.2 on the following page, and again
consider each case separately.
A = 0, B = 0 (U = 0)
In this case F is arbitrary and Y = fi, constant. Equation (3.11)7 is satisfied so that
X = 0, Y = fi, U = 0, F arbitrary, Q arbitrary is a set of solutions.
A = 0,B^0
Substitution of F = Ke~ClU , where
Yt Cl = BY'
into (3.11)7 gives
Q' = Ke-^u (Bt~zlB2) - (B** + Byy\
(3.46)
(3.47)

Methods of Conditional Symmetries 77
TABLE 3.2
Condition
A = 0, B = 0
A = 0,B^o
A^O,B^O
Ay£O,B = 0
F
arbitrary, Y constant
Ke~ClU where ci = -J^
i) K, constant if Ay = =f-Yt
*ii) c4(u + ci)~C2 , c2 ^ 0
iii) c3 ln(u + ci) + c4 , c2 = 0
where ci = ^, C2 = -jfc, c3 = A yy are constants
Same as for A^0,B ^0 but with ci replaced by 0
* F = g- + c4(w + ci)_C2; c2 0, but as
A = ^ ^ , then .4 = A(t) and so c3 = 0
Requiring each term in this equation to be a function of u alone, we set
K(Bt-ciB2) (Bxx + Byy\
02 = B 5 °3 = ~ { B ) • Equation (3.47) becomes
Q' = C2e~ClU + c3 .
Thus, depending on ci, we get 2 possible solutions for Q and hence for X, Y, U :
(3.48)
(3.49)
i) Cl ^ 0
From (3.49), Q = ^e~ClU + c3u + c4 . From (3.46), we have B = B(t), so that

Methods of Conditional Symmetries 78
c3 = 0 . From (3.48) 1, we have for K ^ 0,
Bt-%B = ciB2.
Solving this Bernoulli equation we have
c2
—c\K A- c2c5e ~K1
c2 = 0
-ciK + c^e-^ C2^° 1
CKi — Cit
where cti and C5 are constants. From (3.46) then
Y - a
~ ~^ c2 0 1 C2C5 — CiKe K a2
&1 ~ C\t
where a, ai and a2 are constants.
c2=0j
ii) ci = 0
From (3.49), we have Q = (c2 + c3)u + c4. As ci = 0, from (3.46), Y = fi constant.
From (3.48)i, for K ^ 0, B = f(x, y)e * * where from (3.48)2 , / needs to satisfy
J xx 1 Jyy = ~JC3.
A ^ 0, B 7^ 0
(a) F = K. constant
In this case we have
Ay = ^Yt . (3.50)
Substitution of F = K into (3.11)7 shows that Q needs to satisfy
Q'(Au + B)-QA = u(KAt) + (KBt - Bxx - Byy) . (3.51)
Equation (3.51) is a linear equation for Q, which can be solved. Since Q must be a
function of u alone, we deduce that the following must be constants:
B
KAt
A
and ' -p—5^ - , ,
= c2 , (3-52)
KBt ~ BXX — Byy

Methods of Conditional Symmetries 79
Equation (3.51) then becomes
(u + ci)Q'-Q = uc2+c3. (3.53)
Noting from (3.52)i that B = a.A, we have c3 = cic2. Hence equation (3.53) has
the solution
Q = c2(u + ci) ln(u + ci) + c4(u + ci).
Equation (3.52)2 implies
A = (712/ + 72)e * ; 71,72 constant,
so that from (3.52)i, B = c\(i\y + 72)e^* .
From (3.49),
r = - ^ e ^ + 7 3 , c2^0 C2
= ^ 7 i * + 73, C2 = 0-
(b) F = CA(U + CA~C2
where
B Yt , Cl = TC2 = AY*°- &M^
Noting from (3.54)2 that A = A(t) and B = B(t), substitution of F into (3.11)7
yields
(t. + cXy - 0 = (M< ~^A1) (« + oi)-"+1. (3.55)
W e can show that when c4 = 0, F = 0 (inadmissible). Hence, we assume c4 7 0.
By the same argument used previously, we reason that
C±At — C2C4A2
2 = c5 (constant). (3.56)
Then (3.55) becomes
(u + ci)Q'-Q = c5(u + ci)-C2+1

Methods of Conditional Symmetries 80
so that
Q = *-{u + ci)-C 2 + 1 + c6(u + ci) .
-C2
From (3.56) we find
for c4 7 0, A
A =
C5
-C2C4+/5c5e-^,c^0
1
fi-c2t'
where fi is constant.
From (3.54)i, (3.54)2 and (3.57) we also find
c5=0
(3.57)
for c5 0, B =
Y =
CiC5
-c2c4 + /3c5e c4
7 /?c5 - c2c4e
c4 C5 Q=A^ ( u + Cl)
-C2 + l
and for C5 = 0, B =
\ Y =
-c2 Cl
+ c6(u + ci)
P-c2t 7
P-c2t
k <2 = c6(u + ci) .
(c) F = c. /nfM + ci) + ca
where B Yt -2Ay
Cl = A> C2 = l Y = 0 a n d C 3 = ^4Y£-
From (3.58) 1, we have B = B(y,t). Substituting F into (3.11)7 yields
(u+Cl)Q'-Q = (u+ci) hAt ^+ C 3- 4 2')+(tt+ci)ln(n+ci)
(3.58)
(^r) • <3-59> from which we see that c3 = 0 gives a special case. In the following we show that, in effect,
c3 = 0 is the only case. W e may solve equation (3.59) for Q, and hence deduce that
C4At - Ayy + C3A2
~A = c 5 , (3.60)
and — — = CQ ,

Methods of Conditional Symmetries 81
with C5 and CQ constant. Equation (3.59) becomes
(u + c{)Q' — Q = c5(u + ci) + CQ(U + ci) ln(u + c\) ,
which has the solution
Q = c5(u + ci) ln(w + ci) + — (u + ci)(ln(w + ci))2 + c7(u + ci). (3.61)
Ji
From (3.58)2 > we have Y = fi constant and using (3.58)3 with (3.60)2 , we have for eg , C3 n
c3 7 0, A = 7e°3 " 2 PV but o n substitution into (3.60) 1, we have a contradiction, so that
c3 = 0 and F = c4 . Hence, CQ = 0 and ^4 = ^4(t).
From (3.60)i, (3.58)i and (3.61), we have
s&t
for c4 7 0 A = je °t
B = Ci7ec4
Q = c5(u + ci) ln(u + ci) + c7(w + c\)
and for c4 = 0 F = 0 (inadmissible).
A 7^ OB = O
The same analysis applies here as in the case i / 0, 5 ^ 0 above, but with ci
replaced by 0.
III. X ^ 0. Y = 0
Because of the symmetry between X and Y (and between a: and y) in equations (3.11),
the solutions here will be those of Case II with the X and Y swapped; and all the (x, y)
variables in A, B being replaced by (y, x).
IV. X = 0. Y = 0
From (3.11)5, (3.11)e we find that A = A(t). Substitution into (3.11)7 gives
(Au + B)Q' -QA = F(u)(Atu + Bt) - Bxx - Byy + (Au + B)2F'. (3.62)

Methods of Conditional Symmetries 82
In finding admissible functions that satisfy (3.62) w e in turn consider the cases
4 = 0 B = 0,
A^O 5 = 0,
A = 0 B^O,
and A^O B^O.
A = 0, B = 0
Fr o m (3.62), any arbitrary functions F(u) and Q(u) will suffice.
A 7^ 0, B = 0
From (3.62) we have
uQ' - Q = F'Au2 + F^u , (3.63)
so that we consider the cases
i) F'u2 = jFu , 7 a non-zero constant,
ii) F = K, a non-zero constant, and (3.64)
iii) A = constant c.
Hence from (3.63) and (3.64) we find F, Q and A. We list these in Table 3.3.
TABLE 3.3
i)
ii)
iii)
F
Ku^
K
F(u)
Q
Kfiu^+1 + cu
cu
Kfiu ln u + cu
F(u)cu + c2u
A
P fl-in
1 jt+a
ceP*
c
where c, C2 ,fi,K,a and 7 are constants.

Methods of Conditional Symmetries 83
A = 0, B 7 0
From (3.62) we have
Q' = ^F- (B™+Byy\ + p'B (3.65)
so that we consider 3 cases:
i) F' = 7F; (7 a non-zero constant)
W e thus have F = Kelu, where K is constant. From (3.65) we require
Bt
and
Solving (3.66) gives
+ 1 B = fi constant (3.66)
— to be constant. B
1 fi = 0 yt + a
where e and a are constant. From (3.65) then, Q = ^&eru — cu + d, where c and
d are constants.
ii) F = K\ constant
This case leads to a linear source term, which we neglect.
iii) B = a\ constant
From (3.65), Q(u) = aF(u) + fi where fi is constant.
A j- 0, B i- 0
From (3.62) we have
2 /» 771/ -"zx + -Oyjy (« + £?A4)Q' " Q = -J (« + B/A)F + (u + B/AYAF1 - x* yv. (3.67)
Since Q must be a function of u alone, we set £/A = a so that B = B(t). Since Q is
a function of u alone, we must consider the following cases:

Methods of Conditional Symmetries 84
i) (u + d )2F' = 7fit + ci )F (7 a non-zero constant)
so that F = K(u + ci)\ with K constant.
From (3.67), we require
„ At lA + — =c2 and B = cxA ,
so that A = °2/l , and B = Cl°2h l + c3e-
c2* l + c3e-c2*"
Also from (3.67), Q(u) = aK(u + ci)^+1 + fi(u + ci) (a, /3 constant).
ii) F' = jF h a non-zero constant)
Hence we have F = Kelu, K constant.
From (3.67), we have A = a (constant), so that
B = cia and
Q = aKera(u + ci)+fi(u + ci).
iii) F = K\ a non-zero constant
From (3.67) we require
KAt , A BXt
= c2; so that A = ae *z and so A
B = acie*1, and ^2-t
<2 = c2(« + ei)ln(w + ci) + c3(« + ci).
iv) A = a: constant
From (3.67) we require
(u + ci)Q' - Q = a(u + ci)2F'(u)
so that Q(u) =a(u + ci)F(u)+fi(u + c1) .
Special Note:
In Case IV, i.e. X = 0, Y = 0, we note that when U 7 0 is a function of u alone (so that
A and B are constants), then for an arbitrary F(u), we can find a corresponding Q(u) by

Methods of Conditional Symmetries 85
the formula:
(A(uAf)F(u)+K(u+f) , A^O Q(u) = I (3.68)
{ BF(u) + K , A = 0
where K is a constant. This special choice leads to a nonclassical symmetry.
3.2.4 Symmetry Reductions
Although all classical point symmetries of reaction-diffusion equations are known [48],
very few of these have been used to effect reduction of variables. A n extensive list of variable
reductions is now given in Table 3.5. The symmetries considered, listed in Table 3.4 include
all the strictly nonclassical ones (numbers 9, 10 and 11), as well as a number of classical
symmetries. This list is simplified by setting at least one constant to zero or unity by simple
rescalings and translations of the dependent and independent variables in the original P D E
itself; as well as simple translations within the invariant surface condition. As an example,
consider the case
Kut = uxx + uyy -f- c4(u + ci)_ C 2 . (3.69)
Letting u = v — ci, (3.69) becomes
Kvt = vxx A vyy + c4v~C2 . (3.70)
Next we let c4
t-> — i K
X -r y/\c~T\x ,
and y -> y/\c^\y ,
so that from (3.70), w e have for c4 0,
Vi = vxx + Vyy + 8v~°2 ,
CA
where 6 = -,—r. Hence, without loss of generality we can take K = 1, ci = 0 and
M c4 = 6. (The case c4 = 0 would need to be considered separately).

Methods of Conditional Symmetries 86
rO
><
X
<?
EK
7|-
fl-+ <§J-
•
i
fh + «§h + w|£
a QJ MS
r-l
^^ t-H
7 1 o
fl-+
£]-i
•
« rH
1 <J
fl-+ <g|-+ Hl-
o rH
1 o cs
rH
o" Ik u r"
o
?
w ^ ^ cs
e ^
o o
o o
3 «5 + r r
% „r—^,
eo
3
*H
•r*
w o 1 + o
fK + <§]-1
PJ-
m
1 4-IA
cs
fh + <Sh + MI
S' +
<J
1 i-H
+ IO
o cs
1 1 CS U
Ik J" U
i—l
1 Ik if m
i 3
o
1 3 •—v
• > *
S
>5 0
+ rH
H
e. u
1
+ a na
s* *s
(SIS'
»
u
1 u 4-
1:
3
+ rH
+ C1 1 3 rH
o Ik cs U
u
1 3 ir^-N.
IO
3
*5
u
<l
u
0
+
C
1
+ 0 <c
^ ~" ih
-»
u
1 U
0
Eh
3
+ + u
1 3
©
Ik
i 1
3 •—^
«o
|i
Hi—
o\S
Bl-
Ol (S
ih
3 "3
O Ik ff
1 3 y—N
f-
if
»H|«
ri«
T-*I*»
ih
3
o Ik s
1 3 s—>
oo
o Cq k
C/3
Dq c ^ cS
const
o
o
2 DQK-t-- f - ^
• +
b
is tH
e3 ^ r — ^
o
-u C cS HH> 72
c o y
Gq
cq
o
o
-<
+ "ir cq
>> (H
c3 <-i
3 c3
o" r—1
cq «3
+ HJ CS
5cq
such t
yy ~
•-cq
IS + H H
H
Cq cq
o
o
8 o u"
+
3 i — i
r-H

Methods of Conditional Symmetries 87
Q CU
-a co o
-a LH
<JJ> IrH
U | <0
I
coKo coR>
- i +
coH o 1 -«-W> cS|S
H-coKo U^ -*
o II
to Vyi tM
+
+
+ <0R
•53*
3
3
<JJ
(M
+ ?3-CN ;**
+ -e-
" t««rS
u .o
I H-S
uv> 3 3
'35 'a
to
O"
fa
3 to to
o ^k
3 to tO
"to
cs
3 to + 3 til
3 3„ tl
w
1 <!
1 ff Ik ^ tf tf
3
+ i-<
4-
tO
I 3
IO
o Ik ff

Methods of Conditional Symmetries 88
I % O
D ^^ CQ
fa Q PH
Q fa
O Q H fa
o fa A) ffl i
io
cc fa r-\
PQ
fa Q fa
"8 o
•8
. c"1
to
I 4-CH <J
I
i -©•
els
CO
+ coKO
<JIV
C
o <u vll Cj IS rH
fi ^
Ss ,fi
T«ff H + II « W> II 3 3
+ + CH
O I 3
rH
to
+ 0s
Cj Ik ^o, e
IT
CO
CJ rH
to
+ « ©
CO
CJ rH
<o
+
CO
0 to
+
fi ^2
35 + 02 II H -©-^ II II £T 3 3
+ 1k
to v-'
I 4-
+ + vj
cj O
to "« — CO V -0
+ + oc
Oi ""••»
cs
+
J
p> 4- « ",A k ^ i r* -M
.S 3 CO o Uy tH ' 0 3 -O-
HO
fi -> o\S
+ H II
CH
o HO rH
HSV + <JU> 3» - -
*" II II C^ 3 3
u I 3 CO
O
3 to
3
fA
o
ff
tl
3
oo Ik

Methods of Conditional Symmetries
fa Q fa T3 <U
3 -0 CO «H
3 3" uj;
C7
fa
/ o
<0|<0 es cs a ft es
-of CO
cs
^ + * " rH
e v CN 1 4- "fc-~ cs ClcV + ^V^ + f cs -e,
CJ ^ . ' .cs
^ ^ CJ ff 1
C? Ik JS,
CJ
H HO > Mo c I
' Hff 3 35
II + 02 ' 3J -e-
<JU>
II II •3 3 3
-©--< | II
+ H H - -
• CO
' S vf
+
II 3
O % ^ co" H-7
3 e3
£«*§ + 3
^°l ^ + ;
>-> IH cd tH HJ
£ cd / — Oi
i
n 3>
+ H H -©•
>— ^ 35
+ -to
cq II 3
cn HJ fi cd HJ cn C o CJ ^
cq"
*
+ 'F fa cq
>> tH cc! tH HJ
rQ t. cd ^^ o rH
| --to
1 35
j£ cq
II 3>
+ H
-£
-^ ^ r<5 C Q
"fc e3 es
+ •5°* 2^J3 II
H m cq r q ^ +
ii -i § 3 & cq
HJ
fi <3 HJ CO
c O CJ CJ
o
+ 3 to
3 / N rH r-H

Methods of Conditional Symmetries 90
3.2.5. Some Similarity Solutions of Reaction-Diffusion Equations
The symmetry reductions have led to partial differential equations among a reduced
number of variables, listed in Table 3.5. In some cases, exact solutions ofthe reduced PDEs
are already accessible. However some of the reduced PDEs listed in Table 3.5 are themselves
complicated. The task of constructing all accessible solutions to all of these (e.g. by further
nonclassical symmetry analysis) would be enormous. W e merely give some examples.
Example 3.1
F = eu, Q = cueu + 8u. (3.71)
In terms of the temperature (or concentration) variable 0 of equation (3.1), this example
corresponds to
D = l/0 and R = c0ln0 + 6\n0 . (3.72)
In this case, to achieve reduction of variables, we merely define
0 = ue'ct (3.73)
to obtain the linear Helmholtz equation
4>xx + 4>yy = S<t>- (3.74)
Solutions to (3.74) are readily obtained by separation of variables and Fourier expansions
[55]. Because of its wide variety of applications, in such areas as magnetohydrodynamics
[56] and hydrology [57], various complicated explicit solutions to equation (3.74) are already
available.
Example 3.2
F = u~C2, Q = u. (3.75)
In terms of the temperature variable 0 of equation (3.1), this corresponds to
D = [(1 - c2)0]^, R = [(1 - c2)0)^, (c2^l) (3.76)
or to D = e\ R = ee, (c2 = 1) . (3.77)

Methods of Conditional Symmetries 91
The variable reduction
u = y+-L\nt £ = x (j) = ut1/c2 (3.78) c2
results in (d2(j) d2cf> A ± Co
7~ 0 duj
(3.79)
General solutions to (3.79) are not known. However, we can obtain special solutions using
ad-hoc techniques such as equation splitting [58].
For example, setting each side of (3.79) to zero, we obtain the solution
cf) = Asin([l + 7~2]1/2£ + p)ewh
= At1'C2eyhsm([l + T2]1/2x Ap)
with amplitude A and phase p arbitrary.
(3.80)
Example 3.3
Arrhenius reaction term R = Ce~1/e (3.81)
This reaction term arises from statistical mechanics when a reaction is controlled by a single
rate-determining step with a well defined energy jump [59]. So far, nontrivial exact solutions
of (3.1) have remained elusive. Remarkably, Table 3.5 shows a nonclassical reduction to
the linear Helmholtz equation from any choice of nonlinear rection rate and a corresponding
choice of nonlinear diffusivity. Given equation (3.81) for the reaction rate, we choose
D = £e1'eexp£ f e^d0i (3.82) c c J0Q
with A and 0Q arbitrary positive constants.
This corresponds to the case
Q = AF(u) (u + B/A) (3.83)
appearing in Table 3.5. The change of variable
•B u= -—+cj)(x,y)e At

Methods of Conditional Symmetries 92
results in Laplace's equation
V2</> = 0,
for which many solutions are available from potential theory. Then 0 may be recovered by
inverting A fe ,
u + B/A = exp- e1/Old0i. (3.84) c Je0
W e remark that exactly the same reduction applies in one and three spatial dimensions.
3.3 Nonclassical Solutions are Rare for Nonlinear Diffusion
3.3.1 Background
W e now consider the nonlinear diffusion equation (3.2). As stated in Section 3.1, the
result in [39], that every solution to the linear heat equation
ut — uxx (3.85)
is invariant under some classical symmetry, has motivated us to find the number of strictly
nonclassical symmetries of (3.2) in 2+1 dimensions. W e restrict our attention to the nonlinear
case D'(0) 0, which has a variety of applications.
As all the classical symmetries of (3.2) are already known [48], rather than completely
solving the nonlinear nonclassical determining relations fully, we may make a more judi
cious choice of T so that we can compare these nonclassical determining relations directly
with their classical counterparts. In all cases but one, for T ^ 0, we can infer that every
nonclassical symmetry vector field
r\ r\ r\ r\
r = T(x,y,t,u)—+X(x,y,t,u)—+Y(x,y,t,u)—+U(x,y,t,u)— (3.86)
is equivalent to some classical symmetry vector field with co-ordinates
{f,X1Y,U)=ip(x,y,t,u){T,X,Y,U)
for some scalar function ip of x, y, t and u. Hence they are not strictly nonclassical (see
Section 1.1.3). W e illustrate this technique for the case T ^ O and state the results for
T = 0.

<
Methods of Conditional Symmetries 93
As in Section 3.2, we simplify our P D E (3.2) by first applying the Kirchhoff transfor
mation (3.6). Our P D E then becomes
F(u)ut = uxx + uyy (3.87)
where F(u) = . As before, the linear case F'(u) = 0 will be neglected.
3.3.2 The Case T ^ 0
The classical determining relations of (3.87) are
' Xu = Yu = 0
Uuu = 0 so that U = A(x, y, t)u + B(x, y, t)
2AX + XtF = 0
2Ay +YtF = 0 (3>88)
Ayyu + Byy + AXXU + Bxx - (Atu + Bt)F = 0
(Au + B)F' + 2XXF -TtF = 0
Xx = Yy ; Ay = — ix .
As it is known that in all the classical symmetries of (3.87), T is a function of t alone,
then without loss of generality, we make this assumption for the nonclassical symmetries.
The nonclassical determining relations of (3.87) are
( Xu = Yu = 0
Uuu = 0 so that U = A(x, y, t)u + B(x, y, t)
X(Au + B)F' + (TXt - XTt + 2XXX)F + 2AXT = 0
Y(Au + B)F' + (TYt - YTt + 2YYy)F + 2AyT = 0 (3.89)
F(TAt - ATt)u + F(TBt - BTt) - T(Axxu + Bxx) - T(Ayyu + Byy)
+2FYy(Au + B) + F'(Au + B)=0
, Xx = Yy ; Xy = —Yx .

Methods of Conditional Symmetries 94
W e examine all the possible solutions of (3.89) (these need not be solved fully) and in
each case find if possible, an equivalent symmetry which satisfies (3.88).
W e note firstly that from (3.89)i, X and Y are functions of x,y and t only. As
well, since (3.89)6 and (3.89)7 are the Cauchy-Riemann relations, we will frequently make
use of the fact that X and Y are harmonic functions
V2X = v2y = 0 . (3.90)
The subcases
X^O 7^0,
X = 0 Y ^ 0 , (or equivalently, after a rotation , 1 ^ 0 , 7 = 0)
and X = 0 Y = 0,
will need to be examined separately. Within each of these subcases, we need to consider the
three possibilities (A = 0, B = 0) , (A = 0, B^0) and (A^0, B^0).
I. X J- 0. Y ^ 0
A = 0, B = 0
The classical and nonclassical determining equations respectively reduce to
(XtF = 0; YtF = 0
and
{ 2XXF -TtF = 0
\ -A-x — *y ; y — x
( TXt - XTt + 2XXX = 0
TYt - YTt + 2YYy = 0
(3.91)
(3.92)
s*-x — *y > -**-y — *x
for X(x,y,t), Y(x,y,t) and T(t).
Differentiating throughout (3.92)i with respect to x, (3.92)2 with respect to y and
subtracting the resulting equations gives
A-AJJX Y * yy — U • (3.93)

Methods of Conditional Symmetries 95
Differentiating throughout (3.92) i with respect to y, (3.92)2 with respect to x and
adding the resulting equations gives
XXXV + Y Yxv — 0 -xy xy
Now from (3.93), (3.94) and (3.92)i, (3.92)2 we find
•A-xy = O > "ii == U
(as in Appendix 1), thus giving
X = xf(t) + yM(t) + L(t) ,
and Y = yf(t) - xM(t) + J(t)
for some functions /, M, L and T of t.
On substitution of (3.95) into (3.92)i we find
2/2 - fTt + Tf = 0
2Mf - MTt + TM' = 0
From (3.96)i,
I 2Lf - LTt + TL' = 0 .
T / =
2t + c
from some constant c.
From (3.96)2 and (3.96)3 we have
M = ci./ and L = c2./
for some constants ci and c2 . Hence from (3.95)
T \ ( T X = x
and Y = y
_2t + c/
T s
+ ciy
CiX
2t + c/
T y
+ c2
+ c3
2t + c,
T
(3.94)
(3.95)
(3.96)
(3.97)
2t + cJ "i" \2t + cJ \2t + cJ
Hence if we take T(t) = 2t + c, then with X and Y as in (3.97), all classical
determining equations (3.91) are satisfied.

Methods of Conditional Symmetries 96
A = 0, B 0
The classical and nonclassical determining equations respectively reduce to
(XtF = 0; YtF = 0
Bxx + Byy — BfF = 0
BF' + 2XXF -TtF = 0 (3.98)
t -f*-x — •*« ) -A-y — Yx
and ( X(BF' - TtF + 2XXF) + TXtF = 0
Y(BF' - TtF + 2YyF) + TYtF = 0
B(F'B - FTt + 2FYy) + T(FBt - Bxx - Byy) = 0
>. -f*-x — *y j -A-y — -*x
for B(x,y,t), X(x,y,t), Y(x,y,t) and T(t).
From (3.99)i and (3.99)2, F = Ke~cu where if and c are constants and
TXt - XTt + 2XXX
(3.99)
c =
rrt - YTt + 2yyy
(3.100)
Hence from (3.100), ?t_Xt Y X (3.101)
=> Y = g(x,y)X
for some function g(x,y).
We now establish a similar result for B . Substitution of F' from (3.99) i into (3.99)3
gives
FlBt-XtB
X j — (BXX + Byy) = 0
so that if £ t -=r- , then
F = Bt-^t
(3.102)

Methods of Conditional Symmetries 97
Equation (3.102) implies F must be constant, which is a contradiction with the assump
tion F' ^ 0 . Hence FiX
Bt = ~Y~ and Bxx + Byy = 0 (3.103)
and so B = f(x,y)X (3.104)
for some function f(x,y).
Now using (3.101), (3.99)s and (3.99)6 we show that X is of the separable form
X = H(x,y)G(t) .
We have
(3.105)
(3.106)
Xx — Yy — gyX + gXy
~Xy = YX= gxX -f gXx .
Substitution of (3.105)2 into (3.105)i gives
Xx = gyX - g(gxX + gXx)
so that Xx _ gy - ggx X " 1+g2 "
As the right hand side of (3.106) is a function of x and y, we find from (3.106) that
X=Pi(v,t)qi(x,y) (3.107)
for some functions pi of y,t and qi of x,y . Similarly from substitution of (3.105)i into
(3.105)2 we find
X=p2(x,t)q2(x,y) (3.108)
for some functions p2 of x,t and q2 of x,y. Hence from (3.107) and (3.108)
where p3 is a function of t; and so X is of the form
X = H(x, y)G(t) . (3.109)

Methods of Conditional Symmetries 98
Hence from (3.101) and (3.104)
Y = I(x,y)G(t) and (3.110)
B = J(x,y)G(t)
for some functions / and J of x,y. Also from (3.99)4, (3.99)s and (3.103)2 we have
Xlx — -Ly ; -"2/ — *-x
and Jxx + Jyy = 0 .
If we now divide the infinitesimals of the nonclassical symmetry throughout by G(t)
so that we replace
T b y ^ y G(t) '
X by H(x, y) , y y y) (3.111)
Y by I(x, y) , and B by J(x, y) ,
then these new coefficients satisfy all the classical determining equations (3.98) with
F = Ke-°u . (Note as FBt - Bxx - Byy = 0, then F'B - FTt + 2FYy = 0 from
(3.99)3 .)
A ^ 0, B ^ 0
The classical and nonclassical determining equations are given by (3.88) and (3.89)
respectively with X(x,y,t) and Y(x, y, t).
Solving (3.89)3 and (3.89)4 we find two possible solutions for F.
(a) F= — +c4(w + ci)-C2 ; c2 0 (3.112)
c2 B
where c\ = — , A
TXt - XTt + 2XXX TYt-YTt + 2YYy c2 = ^ = jp r^O, (3.113)
2lJ\.x± A Ay J.
°3 = AX = AY '
and C4 arbitrary, are all constants. We first show by contradiction that c3 must be zero.

Methods of Conditional Symmetries 99
Suppose c3 ^ 0, then from (3.113)3
__ Zi J\rp J- ., _ Ji J\.>\lJ- , >
X = 2L_ ; Y = v— (3.114) c3 A c3 A
v
so that from (3.89)6 and (3.89) 7
_ 2 (AAXXT - AXT
- -A | ^AyyT ~ AyT ~ c3\ A2 ' ~ ^
(3.115)
(3.116)
and
X = "TT ( ^ j
~ ^ V ^ J - ~Yx • Hence from (3.116), either Xy = —Yx = 0 or c3 is zero. However if Xy = —Yx = 0,
then from (3.113)2 A^l_fTXt-XTt + 2XXx\
c2\ X J so that Ay = 0 (as Xy = 0) and then Y = 0 from (3.114)2 . This is a contradiction to
F ^ O , and so c3 must be zero.
Hence c3 = 0 and from (3.112), F = c4(u+ci)_C2 andfrom (3.113)3 and (3.113)!
A = A(t) and B = B(t).
From (3.113)2 we have
X = g(x,y)Y (3.117)
for some function g(x,y). Using (3.117) with (3.89)6 and (3.89)7 we find
X = fi(x,yh(t) (3.118)
and Y = f2(x,y)j(t)
for some functions /i, f2 of x,y and 7 of t.
Now from (3.115), Xx is a function of t so that from (3.118)i, fi(x,y) must be
constant. Similarly we find that f2(x,y) must be constant.

Methods of Conditional Symmetries 100
Hence from (3.118), (3.89)6 and (3.89)7,
X = (ex + dy)j(t)
and Y = (cy — dx)^(t)
with c and d constants.
Substitution of (3.119) into (3.113)2 gives
A = A C2
T^' - jTt + 272c
7
(3.119)
(3.120)
If we now let T(t) = i{t)h(t) (3.121)
then from (3.120)
A = l(t) 2c-h'(t)
c2 From substituting F = c4(u + ci) °
2 into (3.89)5 we deduce
TAt - ATt + 2AYy - c2A2 = 0 ,
which when combined with (3.122) implies
h"(t) = 0 so that
(3.122)
h(t) = at + fi (3.123)
for a and fi constants.
Hence we have established that from (3.119), (3.121), (3.122), (3.123), (3.113)i,
T(t)=j(t)(at + fi),
'2c-a\ A = j(t) ^
B = 7(t)ci
c2 /
2c-.iV
X = (ca: + dy)i(t) ,
and Y = (cy — dx)j(t) ,

Methods of Conditional Symmetries 101
where a,fi,c,d,ci and c2 are constants.
If we now divide the above nonclassical infinitesimals throughout by 7(2), then these
new coefficients satisfy all the classical determining equations (3.88) with
F = c±(u + ci)~°2 . (As an example, from (3.89)5 we can derive (3.88)6 •)
(b) F = c3ln(n + ci) + c4
(This case arises when c2 as in (3.113)2 is equal to zero).
W e can show that this case will always lead to c3 = 0 and thus F' = 0 . Hence we
choose to ignore this case here.
(We note though, that this case also does not lead to any strictly nonclassical symmetries).
II. X = 0, Y ^ 0
From (3.89)6 and (3.89)7 we have that Y depends on t alone. This will be assumed
throughout this case.
A = 0, B = 0
The classical and nonclassical determining equations respectively reduce to
fY* = 0 (3.124)
and
TYt -YTt=0. (3.125)
for Y(t),T(t).
From (3.125) we have
Y = cT
for some constant c, so that we have
X = 0, Y = cT, A = B = 0 (i.e. U = 0) and T = T(t) . (3.126)
If we divide all the above infinitesimals by T(t), then the new coefficients will satisfy
the classical determining equations (3.124).

Methods of Conditional Symmetries
A = 0, B 0
The classical and nonclassical determining equations respectively are
'Yt = 0
' Bxx + Byy — BtF = 0
I BF' -TtF = 0
and YBF' + (TYt - YTt)F = 0
-T(BXX + Byy - FBt) - TtFB + B2F'
for B(x,y,t), T(t).
From (3.128)i we have
F = Ke~ClU
0
where TY - YT
ci = YB
and K are constants.
Substituting (3.129) into (3.128)2 , we have for cx / 0,
X*xx "T X>vu — U 'xx -r yy
and BtT - TtB - B2ci = 0
From (3.130), we find B = B(t) and from (3.131)2
B = c2 — Cit
where c2 is constant.
Also from (3.130)
so that
Yt Bci+Tt Y
Y =
T
aT
c2 - CiT
(3
(3
(3
(3
(3
(3
(3
for a constant.

Methods of Conditional Symmetries 103
Hence using (3.132) and (3.133) we have
nT T X = 0 , Y = —^-= , A = 0, B = and T = T(t) (3.134)
c2 - ciT c2 - ci* where a,ci and c2 are constants. Thus if we let T(t) = c2 - cit in (3.134) then the coefficients (3.134) satisfy the
classical determining equations (3.127) with F given in (3.129).
A ^ 0, B ^ 0
The classical and nonclassical determining equations respectively are
( Ax=0
2Ay + YtF = 0
(Axxu + Bxx) + (Ayyu + Byy) - (Atu + Bt)F = 0
I (Au + B)F' -TtF = 0
and
( Ax = 0
Y(Au + B)F' + (TYt - YTt)F + 2AyT = 0
-T(Axxu A Bxx + Ayyu A Byy - F(Atu + Bt))
+(Au + B)((Au + B)F' - TtF) = 0
for A(x,y,t), B{x,y,t) and T(t).
From (3.136)2 we find 2 possible solution forms for F
(a) F = % + c4(u + ci)-C2 ; (c2 •£ 0)
B where ci — — ,
(3.135)
(3.136)
C2 = TYiJTt i- 0 , (3.137)
2AyT C3 = "I^'

Methods of Conditional Symmetries 104
and c4 arbitrary, are constants.
From (3.137)2,
,_I(Z2W*) and so A = A(t). Hence c3 = 0 and F = c4(u + ci)
_ C 2 .
Substituting F into (3.136)3 we find
TAt - ATt - c2A2 = 0
and so T
(3.138)
lere a is constant.
As well from (3.137)2
that
1- T
CK — C2t
Yt Ac2+Tt Y T
Y_ PT (3.139) a — c2t
v '
where /3 is constant.
Hence we have from (3.138), (3.139) and (3.137)i that
X = 0 , Y= -^— , A = —^— , B = -^— and T = T(t) . (3.140) a — c2t a — c2t a — c2t
If we now let T(t) = a — c2t in (3.140) then the coefficients will satisfy the classical
'determining equations (3.135) with F = c4(u + ci)_ C 2 .
(b) F = cs ln(u + ci) + CA
(This case arises when c2 as in (3.137)2 is equal to zero).
W e can show that this case leads to c3 = 0 and thus F' = 0. Hence we choose to
ignore it here.
(We note though, that this case does not lead to any strictly nonclassical symmetries).

Methods of Conditional Symmetries 105
III. X = 0. Y = 0
From (3.89)3 and (3.89)4 we have A = A(t). This will be assumed thoughout this
case.
A = 0, B = 0
The classical determining equations reduce to
Tt = 0 (3.141)
whilst the nonclassical determining equations are satisfied identically. Hence if we divide the
coefficients ofthe nonclassical symmetries by T(t), the coefficients will satisfy the classical
determining equation (3.141).
A = 0, B ^ 0
The classical and nonclassical determining equations respectively reduce to
Bxx + Byy — BtF = 0
(3.142)
BF' -TtF = 0
and
-T(BXX + Byy - BtF) + B(BF' - FTt) = 0 (3.143)
for B(x, y, t) and T(t).
From (3.143) we find 2 possible solution forms for F.
(a) F=^+c3e-c>u, (ci^O)
ci
TBt-BTt , where cx = ^ r1 ° J
(3.144)
_ rp ( BXX H Byy 2 V B2
and arbitrary c3 are constants.
From (3.144)i, we have
B = —f a(x,y) -cit
(3.145)

Methods of Conditional Symmetries
for some function a(x, y).
Substituting (3.145) into (3.144)2 we find that for a2 + a2 ^ 0,
c2 + (axx + ayy) 1
106
2(a2 + a2) a — Cit (3.146)
As (3.146) is not possible, ax = ay = 0 . Hence a(x, y) = a is constant and from
(3.144)2 and(3.145), c 2 = 0 .
W e then have
X = 0, y = 0, A = 0, 5 = cc — Cit
and T = T(t) (3.147)
Hence, if we let T(t) = a — cit, then the coefficients (3.147) will satisfy the classical
determining equations (3.142) with F = c3e~ClU .
(b) F = CoU + ca (ci = 0)
are constants.
From (3.148),
where TBt - BTt n
ci = -TTo ~ = 0 ,
c2=T
B2
Bxx + B yy B2
and c3 arbitrary
B = h(x,y)T(t)
(3.148)
(3.149)
for some function h(x, y).
Substitution of (3.149) into (3.148) leads to the requirement
" x i I "ii/iy — C2»" (3.150)
Hence we have for F = c2u + c3 ,
X = 0, Y = 0, A = 0, B = h(x,y)T(t) (3.151)
where h satisfies hxx + hyy = c2h2 and T = T(t).

Methods of Conditional Symmetries 107
If we divide the infinitesimals of the nonclassical symmetries (3.151) by T (t), then these
new coefficients will satisfy the classical determining equations (3.142) provided c2 = 0 .
A i- 0, B j. 0
The classical and nonclassical determining equations respectively, reduce to
( Ax = 0
Ay = 0
(Bxx + Byy - BtF) - AtFu = 0
I (Au + B)F' -TtF = 0
and c3 = T X^xx i -Byy
A2
are constants and that
(3.152)
and
( Ax = 0
Ay = 0 (3.153)
I -T(BXX + Byy - BtF - AtFu) + (Au + B)(F'(Au + B) - FTt) = 0
for A(t),B(x,y,t) and T(t).
From (3.153)i and (3.153)2, A = A(t).
From (3.153)3 we deduce that
B C1 = I'
TAt - TtA C2 = \2 , (3.154)
F' + F (-^- ) = °3 . (3.155) U + CiJ (w + ci)2
As A is a function of t only, from (3.154)i and (3.154)3 , we find c3 = 0 .
Hence from (3.155)
F = a(uAci)~C2

Methods of Conditional Symmetries 108
where a is constant.
From (3.154)2 we have
A = fi-c2t
where fi is constant.
Hence the infinitesimals for the nonclassical symmetry are
(3.156)
X = 0, y = o, A = T aT
, B = —± and T = T(t) . fi-cit p-c2t
w
(3.157)
If we now let T = fi — c2t in (3.157), the coefficients will satisfy the classical deter
mining equations (3.152) for F = a(u + ci)_ C 2 .
In conclusion, the only strictly nonclassical symmetry of (3.87) for the case T 7 0 is
when F = c2u + c3 ; c2 7 0. In this case, the infinitesimals for the nonclassical symmetry
are
X = 0 , Y = 0, T = 1, U = h(x,y) ,
where h satisfies
t^xx 1 ""ui/ — C2AJ
3.3.3 The Case T = 0
Applying the same technique as in Section 3.3.2, we find that in all cases except perhaps
one that we could not solve completely, there exist no strictly nonclassical symmetries.
The incomplete case which we discuss here involves F = cum where c and ra are
non-zero constants, U is of the form A(x,y,t)u, A^O and 1 ^ 0 , 7 ^ 0 .
The classical determining equations simplify to
( Ax = 0 \ Ay = 0 ; At = 0
Xt = 0 ; Yt = 0
Am + 2XX = 0
>. -X-X ~ Yy J -Ay Ix
for X(x,y,t) , Y(x,y,t) and A(x,y,t).
(3.158)

Methods of Conditional Symmetries 109
In comparison the nonclassical determining equations simplify to
( mA(X2 + Y2) + 2(X2Yy + Y2XX) - 2XY(Xy +YX)=0
XAt - AXt = 0
XYt -YXt = 0
A2X(mA + 2XX) - X3(AXX + Ayy) - Y(XAy - AXy)(Am + 2XX)
+2X2Ay(Xy + Yx) - 2AX(X2 + YxXy)
+X(XAX - AXx)(Am + 2XX) + X2A(XXX + Xyy) (3.159)
-2X2AAr = 0
2Xy^(raA + 2XX) + X2Y(XXX + Xyy) - X
3(YXX + Yyy)
+2X2Yy(Xy + Yx) - 2XY(X2 + XyYx)
-XY(XX + Yy)(Am + 2XX) + (Y2Xy + X^XraA + 2XX)
+2X3Ay - 2X2YAX - 2X
2A(YX + Xy) = 0
for X(x,y,t), Y(x,y,t) and A(x,y,t). From (3.159)2 and (3.159)3 , if we let
A = h(x,y,t) (3.160)
then X = f(x,y)h(x,y,t)
(3.161) and Y = g(x,y)h(x,y,t) .
Hence if we divide the nonclassical infinitesimals (3.160), (3.161) by h(x, y, t), then
these coefficients will satisfy the classical determining equations (3.158) provided we can
show that
fx = gy and fy = -gx . (3.162)
((3.158)6 would follow directly from (3.159)i).
Substituting (3.160) and (3.161) into (3.159), we have, after minor rearrangements, a

Methods of Conditional Symmetries 110
system of three equations:
fm + 2fx f 2
g2_2g^fL+^=_{m + 2gy)
and
p J (ffx f gfy) + %fy ( , J — fxxA- fyy
{m p X) (9 - 99y + f9x) + 2(gy - 1) I y 9x j = gxx + gyy .
Equations (3.163) are satisfied by any pair of conjugate harmonic functions / and g,
obeying the Cauchy-Riemann relations (3.162).
However, if there is a strictly nonclassical symmetry, there must be a solution of (3.163)
that does not satisfy the Cauchy-Riemann relations (3.162). So far we have not been able to
construct such a solution, and we conjecture that none exist.
3.4 Nonclassical Symmetry Analysis of a Class of Reaction-Diffusion Equations
W e consider the P D E
ut = -K<) + u(u - l)(u - c) (3.164)
for all n^O, +1; and determine whether it possesses any strictly nonclassical symmetries
as was found to be the case for p = 0, n = 1 [40]. The nonclassical method applied to
(3.164) gives rise to a polynomial equation in ux . The coefficients of various powers of ux
in this polynomial are as follows:

Methods of Conditional Symmetries 111
u°x : (1 - n)Uxu4 - (1 + c)(l - n)Uxu
3 + c(l - n)Uxu2 - (1 - n)UxUu
ux : (c+l)(p-2)Uu2 + (3-p)Uu3 + (l+n)Xxu4
- (1 + n)(c + l)Xxu3 - E7tu + pC/
2 + (n - l)UuUu
+ n(l + c)t/uu3 + c(l - p)Uu - (1 + n)XxUu + (1 - n)UxXu
— nUuu4 + c(l + n)Xxu
2 — ncUuu2
uzx : Xtu + (2 + n)Xuu4 - (2 + n)(l + c)Xu u
+ (1 + n)X xXu - (1 + n)XuUu + (1 - n)XUuu (3.165)
+ c(2 + n)Xwu2 - pX£/
ul : (n + l)XuXu
unx : nUxxUP+1
< + 1 : - nXxxwp+1 + 2nUxuu
p^ + 2pC/xwp
< + 2 : -2nXxuup+1+pUuu
p-pUup-1+nUuuup+1
< + 3 : - n X u u «p + 1 + p X u W
p
The powers of ux in (3.165) are independent provided n 0, +1, +2, +3. As we
are not concerned with n / 0 , +1, we considered the cases n ^ + 2 , +3, n = 2, n =
—2, n = 3, n = — 3 separately.
After a full investigation, it was found that the only strictly nonclassical symmetry of
(3.164) was in the case p = —3n, c = — 1 ; i.e. for the PDE
ut = ^(u~3nu2) + u(u -l)(u + l), (3.166)
which has the nonclassical symmetry generator
r= Ft+ {u3 ~u)Tu- (316?)
The invariant surface condition corresponding to (3.167) is
ut = u3 - u . (3.168)

Methods of Conditional Symmetries 112
Hence in solving the system (3.166) with (3.168) we solve the system
d_f /Ua dx I \u3J I (3.169) £)")-»
ut = u3 — u .
W e note that (3.169) corresponds to 'splitting' equation (3.166). The general solution
to (3.169) and hence a solution to (3.166) is
u=[l-e2t(ax + P)]-1'2 , (3.170)
where a and fi are constants.
An Extension
More generally we have found that the PDE
ut = -^ (u~pnun) +up-u (3.171)
has a nonclassical symmetry with generator
Using (3.172), we find the solution
u = [l + (Ax + B)e{p~1)t
to (3.171), where A and B are constants.
3.5 Conditional Symmetries of a Class of Nonlinear Degenerate Diffusion Equations
W e now consider two examples of equation (2.1), namely g(ux) = e~Ux and g(ux) =
u~3 , i.e. the PDEs
Ut = c^c{f{u)e~Ux) (3<173)
and
I-P

Methods of Conditional Symmetries 113
with / 0 .
For these equations we state the results of a nonclassical symmetry analysis. As well,
we provide the details of a generalised conditional symmetry analysis and list some of the
corresponding solutions.
W e note that in both (3.173) and (3.174), the diffusivities decrease at a rate faster than
u~2 . When / = 1, this is the interesting case of strongly degenerate diffusion, within
which non-parabolic behaviour may be apparent in the solutions [17]. It seems reasonable to
investigate the properties of solutions also in the more general case of nonconstant / .
3.5.1 Nonclassical Symmetry Analysis of (3.173) and (3.174)
After a full investigation, we found that for T / 0, there were no strictly nonclassical
symmetries of (3.173) and (3.174) i.e. no symmetries beyond those found in Table 2.1.
3.5.2 Generalised Conditional Symmetry Analysis of (3.173)
W e let
K(u) = ^-(f(u)e-u*) W <9x u w ; (3.175)
= f'(u)e-Uxux - f(u)e~Uxuxx .
As per the definition in Section 1.1.5, if we let o(u) be a differentiable function of
u, ux, uxx,... then o(u) is a generalised conditional symmetry (GCS) of (3.173) iff there
exists a differentiable function F(u, o) of u, ux, uxx,... and o, ox, oxx,... such that
K'[o]-o'[K]=F(u,o), (3.176)
with F(u, 0) = 0 .
In (3.176) prime denotes the Frechet derivative.
The G C S method must assume a particular ansatz for the symmetry, as the method does
not determine the dependence of the symmetry on ux [16].
From (3.175) and (3.176), we find that equation (3.173) admits a G C S of the particular
form assumed in [16], namely
o = uxx + P(u)u2x + Q(u)ux + R(u) (3.177)

Methods of Conditional Symmetries 114
iff
3fPP' - 4P3/ + 3/'P2 + 3/P2Q = 0
6f'PQ - 10fQP2 + 3fPQ' + 3/'P' + 3/PQ2 + fP"
+3/"P - 4P/P' + 2P3/ - 5P2/' + 3fP2R + 3/QP' = 0
-4/P2P + 3/'P2 - 3/"P - 4Q2/P + 3fRR' + APfQR
-2fQ'R - IQf'R + 3/Qtf2 = 0
-3/'P2 + fR3 - 2QfR2 + 2/PP2 = 0
//// _ Pf" _ SQ2fP + 3/PP' + 3f'Q2 + 6f'PR + 3fQQ' (3.178)
+3/PP' - 8P2fR + 3f'Q' + 6fPQR + fQ" - 4fP'Q
+fQ3 + Sf'Q + 4P2/Q - 9P/'Q - 2PfQ' = 0
-12QfPR + 6f'QR - 2Qf" + 3fQR' - 2Q3f + 3fRQ'
+3f'R' + 3/PP2 + 3fQ2R + 2P/Q2 + fR" - 4fP'R
-2fQ'Q + 3/"P + 4P2/P - 4Q2/' - 8P/'P = 0
I /P3 = 0 .
From the comparison of (3.177) with the invariant surface condition corresponding to
(3.173),
«- "- ' TW "" ~ WMu*eU°+ WXf = °' (3'179)
we see that the GCS (3.177) reduces to a nonclassical symmetry when
p = o , Q = - j and R = 0 . (3.180)
As we already know from Section 3.5.1 that there are no strictly nonclassical symmetries
of (3.173) we choose to ignore the case of (3.180).

Methods of Conditional Symmetries 115
From (3.178)7 , we have P = 0 and hence we will consider the cases
R=0 Q^-j,
R^O <2 = -y,
f and P 0 QJ--*—.
With P = 0, equations (3.178) simplify to
( 3f'R2 - 3Rf" - 4Q 2/P + 3fRR' - 2fQ'R - 7Qf'R + 3/QP2 = 0
-3/'P2 + fR3 - 2QfR2 = 0
/'" + 3/'Q2 + 3fQQ' + 3f'Q' + fQ" + fQ3 + 3f"Q = 0 (3.181)
6f'QR - 2Qf" + 3fQR' - 2Q3f + 3fRQ' + 3f'R'
+3fQ2R + fR" - 2fQ'Q + 3/"P - 4Q2/' = 0 .
We note that the combination R = 0 and Q = -^j satisfies (3.181).
P = 0, Q^-j
Substitution of R = 0 into (3.181) leaves the following two equations
-2Qf" - 2Q3f - 2fQ'Q - 4Q2f = 0
Q" + *f Q' + 3QQ' + 3JfQ2 + Q3 + -Q + = 0 .
From (3.182)i either Q = 0 or
(3.182)
Q' + J-Q+Q2 + T = 0- (3-183)
As all solutions Q of (3.183) satisfy (3.182)2 we need only to consider these 2 possi
bilities for Q.
(a) O = 0
From (3.182)2 , we require /'" = 0 i.e.
f = cu2+du + e (3.184)

Methods of Conditional Symmetries 116
/' where c, d and e are constants. As Q ± — - , we require that c and d are not both zero.
Hence a G C S (3.177) for (3.173) with / as in (3.184) and where c and d are not both
zero is
<y = uxx .
(b) Q satisfies (3.183)
Equation (3.183) is a Riccati equation. Hence letting
1 dw Q = w du
in (3.183) we find
W e write (3.186) as
and hence find that
^ + (VA*y + (Qw = 0. du2 f J du V /
d2
du2
w
(fw) = 0
au + fi
f
(3.185)
(3.186)
(3.187)
(3.188)
where a and fi are constants. From (3.185) and (3.187) then
Q=_2 t ^ au + fi f '
As we are considering here Q ^ - ^ , we require a ± 0. Hence a GCS (3.177) for
(3.173) is
cr — uxx + a )-£
au + fi f
ux ; a^O (3.189)
From (3.181)2,
-3/' + fR-2Qf = 0
so that with
Q = -L f
(3.190)

Methods of Conditional Symmetries 111
we have
R=j. (3.191)
Substitution of (3.190) and (3.191) into (3.181)i gives
f" = [f? f f2
so that
/ = Aeau (3.192)
where A and a are constants.
Hence from (3.190) and (3.191)
Q = -a and R = a. (3.193)
We find that /, Q and R as in (3.192) and (3.193) satisfy (3.181) and hence a GCS
(3.177) for (3.173) with / as in (3.192) is
o — uxx — aux + a . (3.194)
P^O, Q^-^
From (3.181)2 we have
R = 2 Q f j 3 f ' . (3.195)
Substituting (3.195) into (3.181)i gives
(3/' + 2Qf)(4Qf + 3/" + Q2f + 2Q'f) = 0 . (3.196)
Since R i- 0 , then 3/' + 2Qf 0, and from (3.196) we have
Q' + y Q + + 5 y = 0 . (3.197)
Substitution of (3.195) into (3.181)3 and (3.181)4 respectively gives
Q// + g,(y)+3g'Q + Q3 + Q 2 + Q + = 0
Q" + Q' (f / )+ 5Q,Q + 2Q3 + (T /)Q2 (3-198)
xi&xMiym'^--'-

Methods of Conditional Symmetries 118
W e note that equation (3.197) is a Riccati equation, which on letting
2 dw
w du
becomes d2w If dw (3f'\
^ + T ^ + U / r = 0 - (3-199) However a general solution to (3.199) could not be found. On substituting (3.197) into (3.198) we find
3/'Q2 + 4/"Q + f" = 0
3ff2Q2 + 6f(f)2Q + 2/"/2Q + (3f"ff + 2(/')3) = 0 .
Solving equations (3.200) simultaneously, we find that either
(3.200)
6(/')2 - 2f"f = 0 and (a) { (3.201)
3/"/7 + 2(/')3 ~ f'"f2 = 0
6(/')2 - 2/"/ 7 0 and
or (b){ rf,_3rff_2(n3 (3-202) V ~ /(6(/')2-2//")
Q = 0 and or "(c) (3.203)
3/'77 + 2(f)3 - f"f2 = 0 .
We consider these above 3 possibilities separately.
Case (a)
From (3.201)i, we find that either /' = 0 or / = (au + fi)~1/2 where a,fi are
constants. However as f = (au + fi)~xl2 does not satisfy (3.201)2 we need only consider
f = 0.
f = K constant, satisfies (3.201)2 . From (3.197)
where c is constant, and from (3.195)
fl=^- <3-205)

Methods of Conditional Symmetries 119
W e note that with / = K and Q as given in (3.204), equations (3.198) are satisfied.
Hence a GCS (3.177) for (3.173) with / = K, constant is
2 4 cy = uxx H -^-wx H —- . (3.206)
u + 2c w + 2c
Case (b)
Substitution of (3.202)2 into (3.197) and (3.198) gives a system of fifth order highly
nonlinear intractable ODEs for /. Particular examples for / (e.g. eau, un) were tried in
(3.202) but these did not lead to compatible equations (3.197-8) for Q.
Case (c)
If Q = 0, then from (3.197) and (3.198), /' = 0 and so we get a contradiction to
V
3.5.3 Generalised Conditional Symmetry Analysis of (3.174)
If we now let K(u) = i-(f(u)u-3) v ) 9 l w \ ; x J (3.207)
= f(u)u~2 - 3f(u)u~4uxx , then the function o(u) is a generalised conditional symmetry (GCS) of (3.174) iff there
exists a function F(u, a) such that
K'[a] - o'[K] = F(u,o), P(u,0) = 0 , (3.208)
where cr(u) is a differentiable function of u,ux,uxx,... and o, crx,axx,... and prime
denotes the Frechet derivative.
Hence from (3.207) and (3.208), we find that equation (3.174) admits a GCS of the form
a = Uxx + P(u)ux + Q(u)ux + R(u) (3.209)
iff
p = 0 , Q = 0 and
P" + 8P'P + (^p} P' + 6P3 + {^pj P2 + (^j P + = 0 . (3.210)

Methods of Conditional Symmetries 120
From the comparison of (3.209) with the invariant surface condition corresponding to
(3.174) i.e. /'(«) 2 X 5 U 4 n ,
U- ~ # " JZVfl + 3 5 ^ 4 = 0 , (3.211) we see that the G C S (3.209) reduces to nonclassical when
f P = -±- , Q = 0 and P = 0 . (3.212)
3/ Hence we ignore the case of (3.212). W e note however that P as in (3.212) satisfies
(3.210).
As (3.210) cannot be solved in general, we consider some particular cases:
(a) / = K, constant
From (3.210) then we have
P" + 8P'P + 6P3 = 0 . (3.213)
Letting
w = P' , (3.214)
equation (3.213) becomes
ii.
dP W e find equation (3.215) has an integrating factor
w-^ + SPw + 6P 3 = 0 . (3.215)
R=(3P2+w)~4 .
Hence, multiplying throughout (3.215) by this integrating factor, and solving the result
ing exact ODE, we find that either
3P2 + w = 0 (3.216)
or P2 + w ,
where ci is constant and w = P'. We consider these possibilities separately.

Methods of Conditional Symmetries 121
(i) Equation G.216) is satisfied.
In this case we have
P = 3 ^ T 7 (3-218)
where c is constant. Hence a G C S (3.209) for (3.174) with F = K constant, is
" = u°*+ ^TX1 • (3-219>
(ii) Equation (3.217) is satisfied.
For ci = 0 in (3.217) we find that
u + c
where c is constant. Hence a G C S (3.209) for (3.174) with F = K constant, is
1 2 & = Uxx-\ — Ux .
U + C
For ci T^ 0 in (3.217) we have the following cubic equation in w (= P'):
w3 + 3P2w2+ UP4-—\W+ /27P6- — J =0. (3.220)
This equation has only one real root for w. Consequently P(u) satisfies an ODE
P'(u) = A(P), where A(P) is a complicated algebraic function.
(b) P = K. constant
From (3.210) we have
/,,/ + 8Kf" + 2\K2f + 18iT7 = 0 , (3.221)
for which we find the general solution
f(u) =A + Bu + Cu2 ; K = 0
= e-3Ku(A + Bu) + Ce-2Ku ; K^0. (3.222)
/' As we require P ^ - — , the constants B and C in both (3.222)i and (3.222)2 cannot
both be zero.

Methods of Conditional Symmetries 122
Hence a GCS (3.209) for (3.174) with / as in (3.222) is
a = uxx + Ku2x (3.223)
(c) f = u2
From (3.210) then we have
pn + 8P>p + -pt + 6 P 3 + Hp2 + _16 p = Q 22
u u 3uz
Equation (3.224) has a solution
P = — where a = — , — . u 3 ' 3
2 f 1 However as a = — - corresponds to P = — — , we only consider a = — . Hence a GCS (3.209) for (3.174) with F = u2 is
1 2 a = uxx — — w„ .
3u x
3.5.4 Solutions to (3.173) and (3.174)
W e now use the GCSs found in Sections 3.5.2 and 3.5.3 to find solutions to (3.173) and
(3.174).
To obtain these solution, we use exactly the same procedure as that used for obtaining
invariant solutions. W e firstly solve the O D E cr = 0 to obtain u as a function of x with
some arbitrary functions of t. W e then substitute this solution into the governing equation
(either (3.173) or (3.174)) to determine these arbitrary functions of t.
As a simple example, in Section 3.5.3 we found the GCS (3.219)
1 2
cr = uxx + ux 3u + c
for
Ut = c^(K^3) (3,225)
where c and K are constants.

Methods of Conditional Symmetries
Solving o = 0, we find
u = (A(t)x + B(t))3'4 - °-
where A and B are arbitrary functions of t.
Substitution of (3.226) into (3.225) gives
A(t)=a, B{t) = ~t + 0
where a and fi are constants.
Hence a solution to (3.225) is
/ 64 K 0\3/4 c
U={aX+27c72t + P) "3-
W e tabulate the solutions found in this manner in Tables 3.6 and 3.7.

Methods of Conditional Symmetries 124
T A B L E 3.6
Solutions found for (3.173) using GCSs found in Section 3.5.2
/(**)
I
u(l+u)
(A + Bu)eu
(A + Bu)e&u
cu2 + du + e
Solution
1.fu + c\ 1 a a = -x t + p
\ a I a
U(fi(l + u))=fi(x + t + p\
Be—H T
u = ae e — 7
u - -\n( J e-f3(x+Be-0t+-/) _ 1
u = c + (ec lt + a)ex + a;
u = x/i(i) + j(t) where /i,ji satisfy
-eh(t) + U(eh) = 2ct + a and fc(t)
j'(t) - 2ce-hhj = 2cde~hh
where li(x) = \nu
du
and A, B, a, fi, c, d, e, p, 7 are constants.

Methods of Conditional Symmetries 125
T A B L E 3.7
Solutions found for (3.174) using GCSs found in Section 3.5.3
/(«) Solution
A + Bu + Cu2
e~3Ku(A + Bu)
+Ce-2Ku
K^0,C^0
e~3Ku(A + Bu)
K^O
A + Bu
u2
u = +(48t + <y)1/2x + e(48t + 7 ) 1 / 2
1/2
64 3/4
U=[aX+27a*t + f3) ~°
u = (4Ct + 7)1/2z + e(4Ct + i)l/2 - J-
it = -^ln (2Hr4Ci + 2e)1/2x-1fe
+a(2K4Ct + 2e)1/2
u = -ln K3B
(2e)1/'x + ——1 + 1 2e
Bt Q
u = ax -\—^ + fi a'
8 3/2
" = C * + 2 7 ? ' + /3.
where A, B, C, K, 7, e, c, a, fi are constants.

Chapter 4
Symmetry Methods for Ad-hoc Techniques
4.1 Introduction
M u c h of the progress over the years in the theory of linear and linearisable PDEs has
resulted from the use of ad-hoc techniques. In contrast to 'natural' methods, procedures
which are ad-hoc (from the Latin 'for this case only') do not give rise to solutions of a broad
class of PDEs. Rather, they are techniques suited to some very special class of PDEs, and
which aim to produce particular solutions. Examples include separation of variables, integral
transforms and superposition principles. As well, useful solutions to certain nonlinear PDEs
have been found with some ad-hoc processes such as equation splitting.
If these ad-hoc methods for solving a P D E could be related to the structure of the Lie
symmetry algebra of a P D E , then the ad-hoc methods could possibly be systematised and
automated by using little more than the current existing symmetry-finding software which
has been implemented in a number of sophisticated computer algebra programs (see [1], [2],
[3]).
In Section 4.2, w e demonstrate how to use Lie symmetry algebras to find general su
perposition principles for nonlinear PDEs. A m o n g our results, w e show that for any first or
second order P D E in two independent variables, if a surjective superposition exists, and it
can be embedded in a differentiable manifold of nonlinear superposition principles (NLSPs),
then the P D E is linearisable and w e provide the linearising transformation.
By constructing the full class of PDEs with a Lie group of NLSPs, w e derive an ex
pression for a class of second order variable coefficient linearisable equation. A practical
application of this result is discussed, namely steady two dimensional unsaturated flow in
scale heterogeneous porous media.
In Section 4.3, w e 'split' single PDEs into a larger system of P D E s that are chosen so
that they have a larger classical Lie symmetry group than the original single equation. W e
show that this technique can lead to new symmetry reductions and new solutions. As well
w e show how splitting a P D E into a larger system of PDEs which have a common symmetry

Symmetry Methods for Ad-hoc Techniques 127
group with the original P D E can lead to simpler quotient equations to solve and thus provide
solutions otherwise unobtainable.
4.2 Nonlinear Superposition Principles Obtained by Lie Symmetry Methods
4.2.1 Background
In [60], Jones and Ames introduced the idea of (nonlinear) superposition for finding new
solutions of ordinary and partial differential equations.
Formally, the simplest form of a superposition principle is an operation
F(u, v) = u * v ; F : V * V -> W (4.1)
(where V and W are function spaces)
which preserves some governing equations; so that if
f(x, u, uXi, uXiXj,...) = 0
and /(x, v, vXi, vXiX. ,...) = 0
then /(x, w, wXi, wXiXj ,...) = 0
where w = u * v. Of course it is a simple matter to extend this concept to any n -ary
operation that constructs a new solution from n old solutions.
Originally, the only superpositions given were commutative. However, as shown by
Inselberg [61] and Levin [62], commutativity is not a necessary condition for nonlinear
superpositions (NLSPs). Indeed, Levin [62] investigates several methods for constructing
such interesting NLSPs for nonlinear equations. Also, superposition possibilities for ordinary
differential equations (ODEs) of order p > 2 have been investigated by Spijker [63].
It is the purpose of this section to demonstrate how to use Lie symmetry algebras
to find general superposition principles for nonlinear PDEs. Lie's classical method has
the advantage that the symmetry determining equations are linear. This contrasts with the
nonlinear determining relations for a NLSP obtained by direct substitution of w = F(u, v)
into the nonlinear governing equation for w . Our starting observation is that a superposition

Symmetry Methods for Ad-hoc Techniques 128
principle is itself a symmetry of a two equation system
/(x, u, uXi,...) =0 (4.2)
/(x, v, vXi,...) =0.
As far as w e are aware, this simple observation has not been fully exploited.
In Section 4.2.2, w e develop techniques to find NLSPs of the form (4.1), which can be
embedded in a Lie symmetry group or a more general differentiable manifold. This is not such
a strong restriction as one might first suspect. It is difficult to find in the literature any example
of a N L S P that cannot be embedded in a Lie symmetry group. However, having constructed
the most general first and second order PDEs of two independent variables with this type of
NLSP, w e find that all of these are linearisable. This is apparent from the occurrence of a
general solution of a linear P D E within the coefficients of the Lie symmetry generators. W e
also give the transformation to linearise these PDEs possessing infinitely many superposition
principles. In addition, w e provide a more direct strategy for constructing the linearising
transformation directly from the NLSP.
In Section 4.2.3, w e provide a technique that can be used to infer the existence of a
single N L S P without first embedding it in a differentiable manifold. This is again achieved
by considering the structure of the Lie symmetry algebra.
In Section 4.2.4, w e introduce the idea of cross superpositions, where new solutions to
PDEs are written in terms of solutions to the same P D E as well as solutions to other inferred
PDEs. Finally in Section 4.2.5 w e make use of a result found in Section 4.2.2, to find practical
solutions to fluid flow in a scale heterogeneous porous medium.
In this chapter, w e are not considering NLSPs that depend on using special seed solutions
that must be constructed in a particular manner, as for example the N L S P for the sine-Gordon
equation, that relates various iterates ofthe original Backlund transformation (see [64],[65]).
4.2.2. Nonlinear Superpositions of the Form (4.1) which can be Embedded in a Differ
entiable Manifold
In this section, w e provide two techniques for finding NLSPs of the form (4.1) which
can be embedded in a Lie symmetry group. In Section 4.2.2.1, we find them by considering

Symmetry Methods for Ad-hoc Techniques 129
the symmetry of a system of two (or more) equations. In Section 4.2.2.2, consideration of
the symmetry of a single P D E not only gives us a technique for finding the NLSP, but also
indicates that the existence of such a NLSP implies that the P D E is linearisable. The latter
method applies not only to Lie groups of NLSPs, but also to more general differentiable
manifolds.
4.2.2.1 An Uncoupled Two-Equation-System Approach
If nonlinear superposition principles (NLSPs) can be embedded in a Lie symmetry group
of a 2-equation system (4.2), then we can find these NLSPs by considering the symmetries of
the pair of equations. In this case, the system of PDEs needs to have a 1-parameter symmetry
with generator
T = U(u,v)^. (4.3)
(We note that provided U depends on both u and v, the arbitrariness of v implies that the
single P D E will have an infinite dimensional symmetry group with generator
r = U(u,x,y)-^- .) (4.4)
Thus the new solution for the PDE will be
u = u + eU(u,v) + 0(e2) ,
where the determining equation(s) for U will be linear. W e demonstrate this with examples:
Example 4.1
If we apply the classical symmetry method to the pair of equations
ux + uy = g(u) (4.5)
vx + vy= g(v) ,
we find that for a generator of the form (4.3), U must satisfy the linear determining relation
g(u)Uu+g(v)Uv = Ug'(u). (4.6)
Solving (4.6) by the method of characteristics, we find that
U = g(u)4(j(u) - j(v))

Symmetry Methods for Ad-hoc Techniques 130
r 1 where j(u) = / -r^d£
J g(Z and (f) is an arbitrary function of j(u) — j(v).
W e then solve
— =g(u).(/)(j(u)-j(v))
subject to u = u when e = 0, giving us the NLSP
F(u,v)=u = r1 Wv) + KU(v) - J(v))} ,
where K is an arbitrary function. Every such superposition principle F(u,v) has a
transposed partner F(v,u). In this example, the superposition operation is commutative,
F(u,v) = F(v,u), only when the antisymmetric part of the function K(w) is half the
identity map, i.e. -\K(w) — K(—w)] = -w.
Example 4.2 : Riccati Equation
The above considerations easily generalise to systems of n uncoupled PDEs or ODEs
with n > 3 .
Applying the classical symmetry method to the set of 3 equations
ux+ qu + ru2 = p
vx+qv + rv2=p (4.7)
wx + qw + rw2 = p
(where p, q, r are functions of x), we find that for a generator of the form
r = u(u,v,w)—,
U must satisfy the linear determining equation
Uu(p - qu- ru2) + Uv(p - qv — rv2) + Uw(p — qw — rw2)
= -U(q + 2ru) .
Solving (4.8), we find a solution
u= (v-u)(w-u) (w — v)
(4.8)

Symmetry Methods for Ad-hoc Techniques 131
Then, solving du (v — u)(w — u) de (w — v)
subject to u = u, e = 0, we find the familiar [64] ternary NLSP
„/ x _ Xv(w — u) — w(v — u) F(u,v,w)=u = —) '-—-^ -^ ;
A{W — U) — (V — U) A constant.
4.2.2.2 A Scalar PDE Approach
From Section 4.2.2.1, we know that if a P D E has a NLSP embedded in a Lie group, then
the P D E has an infinite dimensional symmetry with a generator of the form (4.4).
More generally, assume that for any pair of solutions v(x) and z(x) to the governing
PDE, there exists a parameter e so that we have a one-parameter solution
u = F(v,z,e). (4.9)
We suppose now that the NLSP is surjective in the sense that for any two solutions u(x)
and z(x), there exists a solution v(x) such that
u = F(v,z,0). (4.10)
From (4.9) then
u = u + e—(v,z,e) + 0(e2) de e-o
= u + eU(v, z) + 0(e2) .
From (4.10), if Fv(v,z) 0, the implicit function theorem allows us to regard v as a
function of u and z. Hence we write
U = h(z,u) (4.11)
= h(z(x,y),u) ,
which we find by solving the classical linear determining equations ofthe PDE. Then solving
du U(z(x,y),u) (4.12)
U=U,€=0

Symmetry Methods for Ad-hoc Techniques 132
we find the N L S P for the PDE.
From the above discussion, h(z(x,y),u) with hz ^ 0, needs to satisfy the determining
equations of the PDE. W e now show that for first and second order PDEs of two independent
variables, this will actually imply that the P D E will have a generator of the form
A(x,y)B(u) —
where A(x, y) is the general solution of a linear homogeneous PDE. Hence the PDE satisfies
the necessary condition for the existence of a transformation to a linear P D E (see [23]).
Furthermore, this condition in this case is sufficient, as we give the linearising transformation
in part (c) below. If the ultimate aim were to establish separation of variables x and u in the
coefficients of infinitesimal symmetry generators, then a direct proof is provided in Appendix
3. However as it still remains then to prove linearisability as in the following sections, we
show here how to simultaneously establish all the necessary conditions for linearisability
from consideration of the possible determining equations.
W e firstly consider the forms that a single determining equation of the P D E can take,
given that h(z,u) satisfies it.
(a) First Order PDEs in two Independent Variables
W e consider a general first order determining equation
(*i(x,y, u)Ux + a2(x,y, u)Uy + a3(x, y,u)Uu = a4(x,y,u)U . (4.13)
Substituting U = h(z(x,y),u) into (4.13) gives
hz[a1(x,y,u)zx + a2(x,y,u)zy] +a3(x,y,u)hu = a4(x,y,u)h. (4.14)
To obtain a solution to (4.14) where h depends on z and u alone, equation (4.14) needs to
be in z and u alone (see Appendix 2). Hence we consider all the possible ways in which
(4.14) can be written as an equation in u and z, and show that in each case, the determining
equation admits separable solutions
h(z,u) = A(z)B(u) , (4.15a)

Symmetry Methods for Ad-hoc Techniques 133
and more generally
U(x,y,u) = A(x,y)B(u), (4.156)
with A(x,y) the general solution of a linear homogeneous PDE.
Case 1: an (x, y, u) = ci (x, y)fi(x, y)p(u)
a2(x, y, u) = c2(x, y)fi(x, y)p(u)
a3(x,y,u) =fi(x,y)q(u)
a4(x,y,u) =fi(x,y)r(u).
From (4.14) we then have
fi(x,y)p(u)hz[ci(x,y)zx +c2(x,y)zy] + fi(x,y)q(u)hu = fi(x,y)r(u)h , (4.16)
so that if the governing PDE is
ci(x,y)zx + c2(x,y)zy = g(z) , (4.17)
where g is an arbitrary function of z, then we have
fi(x,y)hzg(z) + fi(x,y)n(u)hu = fi(x,y)l2(u)h (4.18)
o(u) T\U] for p(u) i- 0, 7i(tx) = ^ and l2(u) = - ^ .
W e consider the following possibilities for (4.18):
(\) a(z) 4 0. 0(x, v) 4- 0. not alK-(u) = 0. i = 1,2.
W e then require fi(x, y) = fi(x, y).
If h(z, u) = A(z)B(u), then from (4.18) we have
Mz)g{z) = l2{u)~ll{)W)=X
where A is a non-zero constant. Hence (4.18) admits separable solutions (4.15a) where
A'(z)g(z) = XA(z)
and (4-19)
^2(u)B(u) - 7i(u)P'(u) = \B(u) .

Symmetry Methods for Ad-hoc Techniques 134
In this case, the function A(x, y) (as in (4.156)) may be a general solution of the linear
equation
d(x, y)Ax +c2(x, y)Ay = XA .
(ii) a(z) = 0. 3(x.v)40. -Yi(u)4 0. i = 1.2.
Then from (4.18)
hu = i(u)h (4.20)
u ( \ ^2(w) where 7(u) = —yA- .
71 (u) Equation (4.20) has the general solution
h(z,u)=A(z)ef'riu)du
where A is an arbitrary function of z. In this case we find that A(x, y) (as in (4.156))
may be a general solution of
ci(x, y)Ax + c2(x,y)Ay = 0 .
Case 2: ai(x,y, u) = a2(x,y,u) = 0
0:4(2:,y,u) = j(u)a3(x,y,u) .
This is a trivial case in which we find the general solution
h(z,u) = A(z)ef^u)du
where A(z) is a general function. This generalises to U(x,y,u) = A(x,y)B(u), where
A is a totally free function of all independent variables. No nontrivial governing equation
has such a general symmetry group. Therefore this case cannot occur in the absence of other
more restrictive determining relations.
Case3: ai(x,y,u)=0 or a2(x,y,u) =0
a3(x,y,u) = a4(x,y,u) = 0.
This case gives hz = 0 which we know will not arise from a superposition principle.
From this case by case study, we conclude that whenever a surjective NLSP can be
embedded in a differentiable manifold of NLSPs, a single determining equation will always

Symmetry Methods for Ad-hoc Techniques 135
admit separable solutions (4.156), with A (x, y) the general solution of a linear homogeneous
PDE. Later, we conclude that allowance for larger systems of determining equations does not
lead to any new PDEs possessing NLSPs. Hence the most general first order P D E in two
independent variables, that can admit a Lie group of NLSPs of the type (4.1), is given by
equation (4.17).
(b) Second Order PDEs in two Independent Variables
W e consider a general second order determining equation:
at (x, y, u)Uuu + a2(x, y, u)Uux + a3(x, y, u)Uxx + a4(x, y, u)Uu
+ a5(x, y, u)Ux + a6(x, y, u)Uy + a7(x, y, u)Uuy + a8(x, y, u)Uyy
+ a9(x, y, u)Uxy = aw(x, y, u)U. (4.21)
Substitution of U = h(z(x, y),u) into (4.21) gives
huu[ai (x, y, u)] + huz [a2(x, y, u)zx + a7(x, y, u)zy]
+ hzz[a8(x, y, u)z2 + a9(x, y, u)zyzx + a3(x, y, u)z
2]
+ hu[a4:(x,y,u)]
+ hz[a3(x,y,u)zxx + a5(x,y,u)zx +a6(x,y,u)zy
+ a8(x, y, u)zyy + a9(x, y, u)zxy] = aw(x, y, u)h . (4.22)
To obtain a solution to (4.22) where h depends on z and u alone, equation (4.22)
needs to be in z and u alone (see Appendix 2). Hence we consider all the possible ways
in which (4.22) can be written as an equation in u and z, and show that in each case, the
determining equation admits separable solutions
h(z,u) = A(z)B(u) (4.23a)
and more generally
U(x, y, u) = A(x, y)B(u) (4.236)
with A(x, y) the general solution of a linear homogeneous PDE.

or
Symmetry Methods for Ad-hoc Techniques
Case 1:
a2(x, y, u) = fi(u)a5(x, y, u)
ai(x,y, u) = 0 , i = 1... 10 , i^2,5
a7(x, y, u) = fi(u)a6(x, y, u)
„ ai(x,y,u) = 0 , 2 = 1... 10, i^6,7
Then from (4.22) we have
fi(u)huz + hz = 0
i.e.
fi(u)hu + h = 7(u)
136
(4.24)
for 7 an arbitrary function of u. Equation (4.24) admits separable solutions when 7(14) = 0.
This is a trivial case that leads to a totally free function A(x, y) in (4.236). This free
symmetry group cannot occur, so we need not consider this type of determining equation in
the absence of more restrictive ones.
Case 2: At least one of a3(x,y,u), a8(x,y,u) or ag(x,y,u) is non-zero. (We note that
at least one of these coefficients must be non-zero for a second-order governing
PDE).
As well, we suppose
ai(x,y,u
a2(x,y,u
a3(x,y,u
a4(x,y,u
a5(x,y,u
a6(x,y,u
a(x,y)li{u)
0
c0(x,y)a(x,y)P(u)
a(x,y)j4(u)
Ci(x,y)a(x,y)P(u)
c2(x,y)a(x,y)p(u)

Symmetry Methods for Ad-hoc Techniques
a7(x,y,u) = 0
a8(x,y,u) = c3(x,y)a(x,y)fi(u)
a9(x, y, u) = c4(x, y)a(x, y)fi(u)
a10(x, y, u) = a(x, y)jio(u)
with fi(u) ^ 0 .
Then from (4.22) we have
hzz = k(z)hz (4
for some function k of z, and
hza(x, y)fi(u)[c0(x, y)k(z)z2x + c0(x, y)zxx + ci(x, y)zx
+ c2(x, y)zy + c3(x, y)k(z)z2 + c3(x, y)zyy
+ c4(x, y)k(z)zxzy + c4(x, y)zxy]
+a(x,y)74(u)hu + a(x,y)ji(u)huu = a(x,y)jw(u)h .
Then if we let
c0 (re, y)k(z)z2x + cQ(x, y)zxx + ci(rr, y)zx + c2(x, y)z y
(4
+c3(z, y)k(z)zy + c3(x, vy)zytf + c4(x, y)k(z)zxzy (4
+C4(:r,;y)2xy = g(z)
equation (4.26) becomes
a(x,y)hzg(z) + a(x,y)fi(u)hu + a(x,y)f2(u)huu = a(x,y)f3(u)h (4
where
t i \ 74(w) , / N 7i(^) , , / N 7io(w) /l(u) = W)' hM = £M /sW = W'
W e note that from (4.25)
h(z,u) = A(z)B(u) + R(u)
where u
A(z)= [Jk{z)dzdz.
We consider the following possibilities for equation (4.28):

Symmetry Methods for Ad-hoc Techniques 138
(i) U (u) = fo(u) = U(u) = 0 ; aix. v)40: a(z) 4 0.
From (4.28), we have hz = 0, giving h = B(u). However, we know that this case
cannot arise from a superposition principle.
(ii) aiz) = 0 , aix, v) 4 0 . not all fM =0. i = 1.2,3.
From (4.28) then we have
h(u)hu + f2(u)huu = f3(u)h . (4.30)
Equation (4.30) admits the separable solution (4.23a) where A(z) is given in (4.29)2
and B(u) satisfies
fi(u)B'(u) + f2(u)B"(u) = f3(u)B(u) .
The linear P D E then which A(x, y) (as in (4.236)) satisfies is
co(x,y)Axx + ci(x,y)Ax + c2(x,y)Ay + c3(x,y)Ayy + c4(x,y)Axy = 0 . (4.31)
riitt a(z) 4 0 . aix. u) 4 0 . not all fM = 0 , i = 1.2.3.
W e then require in (4.28) that a(x, y) = a(x, y).
Equation (4.28) admits separable solutions (4.23a) where
A'(z)g(z) = XA(z) , (4.32a)
and B satisfies
f3(u)B(u) - fi(u)B'(u) - f2(u)B"(u) = XB(u) , (4.326)
for some non-zero constant A .
From (4.29)2 and (4.32a), we find the relationship
Hz) = ^f^1 • (4-33)
The linear PDE then which A(x, y) (as in (4.236)) satisfies is
co(x, y)Axx + ci{x,y)Ax + c2(x,y)Ay + c3(x,y)Ayy + c4(x,y)Axy = XA . (4.34)

Symmetry Methods for Ad-hoc Techniques 139
Case3: Oneof a3(x,y,u), a8(x,y,u) and ag(x,y,u) is non-zero (so that hzz = k(z)hz
for some function k of z), and one or more of the following possibilities:
(i) huz = ki(z)^i(u)hz
(ii) huu = k2(z)hz
(iii) hu = k3(z)hz .
This case however gives a similar result to case 2 (e.g. we can show using (4.25) that
for part (i), the function ki(z) needs to be constant. Then h(u, z) will be as in (4.29) with
B(u) = eieJ 7 l ^ u , where ei is constant. W e can also show that the relationship (4.326)
must hold for any solution (4.29) and hence in particular when R(u) = 0 ).
Hence, whenever there exists a surjective N L S P embedded in a differentiable manifold of
NLSPs, a single determining equation will admit separable solutions (4.236) where A(x, y)
is the general solution to a linear homogeneous PDE. W e show later that consideration of
larger sets of determining relations does not lead to additional PDEs possessing NLSPs.
Therefore, the most general second order P D E in two independent variables with an N L S P
of type (4.1) embedded in a Lie group is identified in (4.27) (with k(z) given in (4.33) for
the case g(z) 4 0).
W e note that most of the above considerations apply if z(x) is a particular generating
solution rather than a general solution of the governing PDE. This leads to the additional
problem that the coefficients in (4.22) may then be reduced to functions of u and z if the
special solution z(x) satisfies appropriate constraint equations in addition to the governing
PDE. However, examples of governing PDEs whose non-separable symmetry determining
relations allow h(u,z) for some special solution z(x) do not appear to have superposition
principles.
(c) More than One Determining Equation
In parts (a) and (b) above, we showed that if a given first or second order P D E of two
independent variables admits a surjective N L S P of the type (4.1) that can be embedded in a
Lie symmetry group, or more generally, in a differentiable manifold of NLSPs, then a single
determining equation admits separable solutions (4.156) where A(x,y) satisfies a linear
homogeneous PDE.

Symmetry Methods for Ad-hoc Techniques 140
If the governing P D E has more than one determining equation, then as h(z, u) must
be a consequence of the system of determining equations, we can deduce that each equation
must have coefficients in z and u only (see Appendix 2).
Hence, any first or second order P D E of two independent variables that can admit a
surjective NLSP of the form (4.1) embeddable in a differentiable manifold, is necessarily
of the form (4.17) or (4.27), (with k(z) given in (4.33) for the second order case when
g(z)4 0).
Equations (4.17) and (4.27) have symmetries with generator
A(x,y)B(u)—,
where A(x, y) is the general solution of one linear homogeneous PDE.
Hence the PDEs are linearisable with
*=lw)du (4-35) the transformation to linearise the PDEs (by Theorem 6.4.2-2 of [23]).
(d) Examples
Example 4.3
ci (x, y)ux +c2(x, y)uy = g(u) (4.36)
has classical symmetries with generator
d T = U(x,y,u) — ,
where U satisfies
Cl(x, y)Ux + c2(x, y)Uy + g(u)Uu = g'(u)U . (4.37)
We require U = h(z(x,y),u) to satisfy (4.37). Substituting U into (4.37) we find that h
needs to satisfy
hzg(z) + hug(u) = hg'(u) . (4.38)

Symmetry Methods for Ad-hoc Techniques 141
Solving (4.38) by the method of characteristics we find
h(z,u) = g(u)Q(j(u)-j(z)), (4.39)
where Q is arbitrary and
Hence rj is given by (4.39) and on solving (4.12) we find the NLSP
u = r'lKz) + G-X[e + G(j(u) - j(z))}} , (4.41)
where G is an arbitrary function and j is given in (4.40).
We note that if in the above example we had written
U = h(x,y,u)
= A(x,y)B(u), (4.42)
then on substituting (4.42) into (4.37) we would have found that A needs to satisfy
ci (x, y)Ax + c2(x, y)Ay = XA (4.43)
and
B(u) = ag(u)e~Xj{u) (4.44)
where a and A are constants and j is given in (4.40). Then solving
^=A(x,y)B(u) u=u,e=0
using (4.42), (4.43) and (4.44) gives the solution
u = j-1\jHcA(x,y) + eXj{u)]\ ; c = Xae , (4.45)
which is in terms of a solution u to the same PDE (4.36) as well as a solution A to the PDE
(4.43).
Using (4.35) and (4.44), we find that the transformation to linearise (4.36) is
v = ieA^) , A

Symmetry Methods for Ad-hoc Techniques 142
which transforms (4.36) to the linear equation
ci(x, y)vx + c2(x, y)vy = Xv ; A constant.
Example 4.4
Co (^, y)uxx + c0(x, y)k(u)u2x + a(x, y)ux + c2(x, y)uy + c3(x, y)uyy
(4.46) + C4(x,y)uxy + c3(x,y)k(u)u
2 + c4(x,y)k(u)uxuy = F(u)
where for F ^ 0 , k(u) = — /* ; A constant F(u)
and for P = 0 , k(u) is arbitrary.
The PDE (4.46) has classical symmetry with generator
T = U(x,y,u)— ,
where U satisfies
Uu + k(u)U = 0 ,
co(x, y)Uxx + ci(x, y)Ux + c2(x, y)Uy + c3(x, y)Uyy (4.47)
+ c4(x,y)Uxy = UF'(u) - UuF(u) .
We require U = h(z(x, y),u) to satisfy (4.47). Substituting U into (4.47), we find that
h = A(z)e~ Ik{u)du , (4.48)
where A(z) needs to satisfy
c0(re, y) [Azzz2 + Az£xx] + ci(z, y) [Azzx] + c2(x, y) [Azzy]
(4.49) -f-c3(a;, y) [Azzz
2y + ^ y y ] + c4(x, y) [Azzzyzx + Az^xy] = XA ,
where A = 0 if F = 0. Hence we choose A(z) = / eSk(z)dzdz as in (4.29).
Then solving (4.12)
du
de fjHz)dzdz.e-Ik^)du (4.50)
u=u,e=0

Symmetry Methods for Ad-hoc Techniques 143
gives the NLSP for (4.46) as
U = p-1[eP(z)+P(u)] (4.51)
where P(u) = / (e/ fc(u)du) du . (4.52)
and that A is any solution to
c0 (re, y)Axx + ci (x, y)Ax + c2(x, y)Ay + c3(rr, y)A
+ c4(x,y)Axy = XA ,
where again A = 0 when F = 0.
Hence, solving
yy
fe=A(x,y)B(u) u=u,e=0
(4.53)
If in the above example we had written
U = h(x,y,u)
= A(x,y)B(u),
and substituted this into (4.47), then we would have found that
B(u) = e~ Ik{u)du (4.54)
(4.55)
we find the solution
u = P-1 [A(x, y)e + P(u)] (4.56)
where P is given in (4.52). The solution (4.56) of (4.46) is in terms of a solution u to the
same P D E (4.46), as well as a solution A to the PDE (4.55). Using (4.35) and (4.54), we
find the transformation to linearise (4.46) is
v = P(u)
= feJk^dudu, ( 4 5 7 )
which transforms (4.46) to the linear equation
co(x, y)vxx + ci(rc, y)vx + c2(rc, y)vy + c3(x, y)vyy + c4(rc, y)vxy = Xv + a

Symmetry Methods for Ad-hoc Techniques 144
for some constant a and where A = 0 if F = 0.
We note that the Potential Burgers' Equation is a special case of (4.46) with
-1 -1 c0(x,y) = 1 , c2(x.,y) = — , k(u) = — ,
a la ci(x,y) = c3(x,y) = c4(x,y) = 0 and F = 0 .
From (4.51) and (4.52) we find the NLSP for this equation as
u = —2a ln ee-z/2a + e-u/2a
4.2.2.3 Finding the Linearising Transformation Directly from the NLSP
In this section we assume that our PDE has a NLSP of the type (4.1) which can be
embedded in a Lie group
i.e. u = F(u,v,e)
dF = u + e
de AO(e2). (4.58)
e=0
We now wish to use this to find the linearising transformation.
Without loss of generality, we assume that the target linear canonical form is homoge
neous (as we'can always subtract a particular solution). Then the variable w that satisfies
the linear equation must have the linear superposition symmetry
w = w + ez
where z is any particular solution to the linear equation.
By a well known theorem of Lie (see [23], Theorem 2.2.5-3), for any one parameter Lie
symmetry group, there exists a change of variable, such that the symmetry is a translation of
a single variable. In general then we would have
G(u,v) = G(u,v) + e (4.59)
where the canonical co-ordinate G satisfies
rc = i,

Symmetry Methods for Ad-hoc Techniques
where T is the classical symmetry generator. Hence from (4.58)
1
145
G(u, v) = J dF
de (u,v,e)
-du.
e=0
Equation (4.59) may be viewed as a linear superposition provided G(u, v) is of the form R(u) „, . , for some function P. [This condition implies that the original PDE has a classical
symmetry with generator R(v) d
R'(u) du •)
Then from (4.59),
R(u) R(u)
Wv)'R(v)+e
R(u) =R(u) + eR(v). (4.60)
Therefore the equation satisfied by R is invariant under linear superposition and the trans
formation to linearise the PDE is
v = R(u).
Example 4.5
UX + Uy = W
From the NLSP for (4.61), the PDE has symmetry
1 u 1
- +ln V
exp (\
\u
\\
VJ + e
Making e the subject we have
exp I = exp + e u v U V
i.e. 1 1 / 1 \
exp — = exp —|- e exp I - ) , u u \ v I
so that the transformation to linearise PDE (4.61) is
1
v = exp I -
(4.61)
(4.62)

Symmetry Methods for Ad-hoc Techniques 146
Using (4.62), equation (4.61) transforms to the linear PDE
VX + Vy = -V.
4.2.3. Nonlinear Superpositions of the Form (4.1) which Cannot be Embedded in a
Manifold
In this section, we show that even if a NLSP cannot be embedded in a manifold, we can
still infer its existence from the structure of the Lie symmetry algebra.
W e now assume that the P D E has any Lie symmetry, and suppose that there exists a
generating solution z(x). Consequently, for every solution u to the governing equation
there exists another solution v so that
u = F(v,z).
Then we have a new symmetry with X = 0;
u = F(v, z A eU(x ,z) + 0(e2))
= u + eU(x,u) + 0(e2) (4.63)
dF where U = -r-(v,z)U(x,z).
dz Hence the symmetry algebra must be invariant under the operation
U^U = Fz(v,z)U(x,z).
So that U conforms to the definition of an infinitesimal point symmetry generator, we must
express U as a function of u and x. For this purpose we regard v as a function of u and
z . In turn, z is a fixed function of x. W e write
U(x,u) = f(u,z)h(x,z) (4.64)
and substitute this into the linear classical determining equations ofthe PDE to find f(u, z).
W e then solve
~(v,z) = f(F(v,z),z) (4.65)

Symmetry Methods for Ad-hoc Techniques 147
for the NLSP F(v, z).
Example 4.6: Potential Burgers' Equation
1 2 uy + 2Wx
= XUn (4.66)
The P D E (4.66) has classical symmetries with generator
d
where U satisfies
F = U(x,y,u)— ,
2XU„. - U = 0
U„ = XU: (4.67)
XX
Writing U as in (4.64), substituting this into (4.67), and using the fact that h(x,y,z) satisfies
(4.67) at u = z, we find
f(u,z) = esnr and h(x,y,z) = j(x,y)e& ,
where j is an arbitrary solution of jy = Xjxx . W e now solve
dF
dz (v,z) = f(F(v,z),z)
_ eF/2X . e~z/2X
giving
F(v,z) = -2X\n. -z/2\ t_ 2X
9(v) (4.68)
Upon substitution of the solution F(v,z) into (4.66), we find that g(v) needs to satisfy
9"(v) + ±g'(v) = 0
i.e. g(v) = -2Xae~v/2X;a constant.
Hence from (4.68) we have the NLSP
F(v, z) = -2Aln [e-*/2A + ae~v'2X' (4.69)

Symmetry Methods for Ad-hoc Techniques 148
4.2.4 Cross Superpositions
From the examples in Section 4.2.2.2, we find that in determining a new symmetry for
a P D E , new solutions can arise which are expressible as combinations of solutions to the
same P D E , as well as solutions to other inferred PDEs. This motivated us to define cross
superpositions.
Definition: Let M^ and M^> be the solution varieties of two PDEs
f(x,u,uXi,...)=0 and g(x,u,uXi,...) = 0
respectively. A cross superposition is an operation from M^ x A4^ to M^
(u,v) i—>• w ; w(x) = G(x,u,v)
so that if
and
then
f(x,u,uXi,...) = 0
g(x,v,vXi,...) = 0 ,
f(x,w,wXi,...) = 0
For example, equation (4.36) has the cross superposition (4.45) and equation (4.46)
has the cross superposition (4.56). In general it is straightforward to show that solutions of
linearisable PDEs with classical symmetry generator
d a(x,y)p(x,y,u)— ,
where a is the general solution of a linear homogeneous PDE
Aa = 0 , (4.70)
and fi is some specified function, can be easily related to solutions of (4.70).

Symmetry Methods for Ad-hoc Techniques 149
On solving
— =a(x,y)fi(x,y,u) u=u,e=0
we find
where
q(u) = a(x,y)e + q(u) (4.71)
ru 1
q(u) = J W^l t) dt (4.72)
and where u and u are solutions of the governing PDE, and a is a solution of (4.70).
Example 4.7
, u - ff(u) , fc(g»y) W X T"Wy //\"T / / \ '
(4.73)
where g is a differentiable one-to-one function. The P D E (4.73) has a classical symmetry
u = u + ell(x,u) + 0(e2)
X = X ,
where U satisfies
TT Lrr L„ (g(u)+k(x,y)\ _TT(^ g"(u)(g(u) + k(x,y))
ux + uy + uuy gl{u) j-u\i {gl{u))2
Equation (4.74) admits the separable solution
a(x,y)
(4.74)
U = 9'(u)
where a is any solution to
On solving
we find the cross superposition
ax + ay = a . (4.75)
du
~de
a(x, y)
9'{u) u=it,e=0
u = g 1(a(x,y)e + g(u)) ,

Symmetry Methods for Ad-hoc Techniques 150
where u and u satisfy (4.73) and a satisfies (4.75).
If a cross superposition is not embedded in a Lie algebra, then following a similar line of
reasoning to that in Section 4.2.3, we may still be able to infer its existence from the structure
of the Lie symmetry algebra.
W e assume that the PDE has any Lie symmetry U(x, u) -r— and suppose that there exists du
a generating solution w(x). Consequently, for any solution u to the governing equation, there exists a solution a (re, y) to another particular PDE, such that
u(x) = G(x,a(x),w) .
Then we have a new symmetry with X 0,
u = G(x, a(x),w + ell(x, w) + 0(e2))
= u + eU(x,u) + 0(e2) ,
where dG
U(x,u) = —(x,a(x),w)U(x,w) .
By inversion we may regard a as a function of x, u and w . In turn, w is a fixed function
of x.
Hence, we write
U(x, u) = f(x, u, w)h(x, w) , (4.76)
and substitute this into the classical determining equation(s) of the P D E to find / .
W e then solve dG — (x,a(x),w) = f(x,G(x,a(x),w),w) , (4.77)
for the cross superposition G(x, a(x), w).
Example 4.8
W e again consider the PDE (4.73). Substituting (4.76) into (4.74), and using the fact
that h(x,y,w) needs to satisfy the determining equation itself at u = w, we find that /
needs to satisfy g(u) + k(x,y)\ ( g(w) + k(x,y)\ (g(u) + k(x,y)}
fx + fy + U{ gl{u) j + U 2 ' H J (A >?%) ( g " H ( 9 H + K^y))\ f9"(u)(g(u) + k(x,y))\ K ' ;
- ' I (g'(w))2 j I (9'(u))2 J"

Symmetry Methods for Ad-hoc Techniques 151
Solving (4.78), we find
g'(w) _ fX -f(xiy,u,w) = —±-$-<f>(y-x,e
xg(u)- / e xk(x,x + c)dx 9 (u) J
e~yg(u) - / e~yk(y - c, y)dy)
(4.79)
where <f> is an arbitrary function.
Now solving (4.77) with / as in (4.79), i.e
dG g'(w)
dw q'(w) _ [x _
= -^r(f>(y-x,e xg(G)- e xk(x,x + c)dx,
e-yg(G)-Jye-yk(y-c,y)dy),
we find that
/ x ry
e~xk(x, x + c)drc, e~yg(G) - / e~yk(y - c, y)dy)
= g(w)+H(x,y,a(x,y)) ,
where ijj and H are arbitrary functions.
To find the PDE that a satisfies, we substitute
e~yg(G) - / e~yk(y - c, y)dy) - H(x, y, a(x, y))]
into (4.73) and find that H(x, a(x)) is any solution of
Hx+Hy + Ha(ax + ay) = H - k(x, y) .
Hence, by selecting
H(x,a(x)) =a(x) ,
we find it sufficient that a be any solution of
ax + ay = a - k(x, y) .

Symmetry Methods for Ad-hoc Techniques 152
4.2.5 A Practical Application - Fluid Flow in Unsaturated Media
W e now use the directly linearisable P D E (4.46), which we found by explicitly con
structing the full class of PDEs with a Lie group of NLSPs, to find new exact solutions for
fluid flow in scale-heterogeneous, unsaturated media.
Fluid flow in unsaturated porous media has been successfully predicted by the Darcy-
Buckingham macroscopic continuum theory (e.g. [66], [67]). It is a major advantage of math
ematical models that a complicated physical system such as an unsaturated porous medium
can be stripped to its bare essentials enabling the prediction of conceptually simple cause-
effect relationships among the most important variables. This is done without the interference
of secondary effects that may be difficult to avoid in experiments. Subsequently, additional
physical factors may be added to the model in isolation. In this section we examine the effect
of heterogeneity on a nonlinear diffusive system.
In both experimental [68] and theoretical studies ([69], [70], [71]), porous media are
often assumed to be scale-heterogeneous; that is, soils at two different places are assumed to
be related by a simple geometric dilatation, with the geometric scale factor varying smoothly.
This may be considered to be the simplest model of spatial variability beyond that of homo
geneity. In this assumption, it is implicit that the porosity is uniform. This is reasonable since
in practice a wide variety of soils may have almost the same porosity.
Integrable time dependent one-dimensional scale-heterogeneous flow equations were
given by Broadbridge ([70], [71]). W e now show in this section that there is a wide variety of
integrable scale-heterogeneous steady flow models in higher spatial dimensions. The class of
allowable scale functions is surprisingly rich. W e display the full range of integrable models
found by this method and solve a small selection of these for cases of experimentally relevant
boundary conditions.
4.2.5.1 Steady Scale Heterogeneous Flow in Porous Media
The Darcy-Buckingham law for fluid flow in a porous medium ([66], [67]) is
V = -KV$ , (4.80)
where V is the volumetric flux of fluid,

Symmetry Methods for Ad-hoc Techniques 153
K is the hydraulic conductivity and
3> is the total hydraulic pressure head.
When K depends on volumetric fluid concentration 9 alone, and gravity is unimportant,
3> is the matrix-fluid interaction potential, 3> = \I/(0), also called the capillary potential.
Substitution of (4.80) into the equation of continuity
| + v.v-o
then leads to the usual equation for filtration in porous media [72]
df) °-l = V • (D(9)V9) (4.81)
where
D(9) = K(9)V(9).
This is the general nonlinear diffusion equation, valid for homogeneous media. For
heterogeneous media, the flow equations are much more general. Assuming that K and *
depend explicitly on position r = (re, y) in two dimensions, as well as on concentration 9,
we arrive at
9t = 4~ [K(9(x,y),x,y){Ve9x + * x } ]
f (4.82) + —[K(9(x,y),x,y){*e9y + %}] .
Using the assumption of Miller and Miller [73], the soil at location r is taken to be a
geometric dilatation of the soil at the origin 0, with scale factor A(r). The Miller scaling
laws are
(4.83)
(4.84) and
where
* = *m(0)/\(r)
K = K*(9)X2(r),
K,(9)=K(9,0).
W e now consider a scale-heterogeneous medium [69] in which A(r) is twice differentiable.
Then (4.82) reduces to the more manageable class of equations
0t = V C(9)X(r)V9 - ( j C(B) + E(9)d9)VX (4.85)

(4.88)
(4.89)
Symmetry Methods for Ad-hoc Techniques 154
where C(9) = K* tf'* (9) (4.86)
and E(9) = tf * (9)K (#) • (4.87)
In two dimensions, the steady state flow equations are
0** + «m + -^ (?l + el) - ^ | fex + fey
We compare (4.88) with the known directly linearisable PDE (4.46),
co(re,y) {9XX + k(9)92x) + Ci(x,y)9x + c2(x,y)9y
+c3(x,y){9yy + k(9)92y}=F(9)
where
a _ F'(9) k(°) = — v m \ 5 a constant, (4.90)
t(9) and find that (4.88) can be directly transformed to a linear equation when
c0(re, y) = c3(rc, y) = -—-—— (assuming Axx + Xyy / 0) (4.91) AXX + Ayy
HO) = m (4.92)
- §^| = fi, constant (4.93)
Cl(x,y) = ^ (4.94) ^xx i ^yy
c2(re,y)= . ^\ (4.95) Axx "T yy
F(6>) = -^ J(C(9) + £(0))d0 and (4.96)
From the definitions (4.86) and (4.87), the requirement (4.93) is equivalent to
X* = 7tf -P , with 7 constant. (4.98)
With fi near 2, this is a reasonable representation of the K*(V*) relationship when
tf * is not too close to zero ([74], [75]).

Symmetry Methods for Ad-hoc Techniques 155
In addition, (4.92), (4.93), (4.96) and (4.97) imply
a=l-fi. (4.99)
With the restriction (4.98), the flow equation (4.88) transforms via the Kirchhoff trans
formation
u = IC(9)d9
= j K*(V*)d$* 7
l_pVl~f3 + e1, fi^l (4.100a)
and u = 7ln|tf*| + e2 , fi = \ (4.1006)
where ei, e2 are constants, to the linear equation
c0(rc, y)uxx + ci(re, y)ux + c2(x, y)uy + c3(rc, y)uyy = (l-fi)u + p (4.101)
where p is the integration constant.
Note that linearisable models of steady flow may incorporate an arbitrary geometric
scale function A(r), even though in the time-dependent linearisable cases, A (re) can only
be a power law or an exponential [71].
4.2.5.2 Models Solvable by Elementary Means
After the Kirchhoff transformation (4.100) on the linearisable models (4.88), (4.91)-
(4.98), w e have a linear elliptic equation of the form
«„ + uvy + ^ux + ^uy = (1-/3) (^±Xi) . (4.102)
Equation (4.102) can be solved by elementary means in the following cases:
i) A = eay+cx with a and c constant, in which case (4.101) has constant coefficients,
ii) \ — F(x)G(y) with F and G arbitrary functions, in which case (4.102) is
separable,

Symmetry Methods for Ad-hoc Techniques 156
iii) A = exp I j^eax[Bsmay — D cos ay] > with a,A,B,D constants, in which
case (4.102) transforms to the constant-coefficient equation
A(uxx + uUu) + Bux + Duv = (1 - fi) f
where (x,y) = eax(sin ay, — cos ay) ,
P2+/> /32A
14,
f 1 . D 2 D 2.) iv) A = expj — ( B x y + — y - — x )j>
with A, B, D constants, in which case (4.102) transforms to
( D 2 I T\2
—WA— u
where (re, y) = I xy, y2 — x2
and
v) A = e x p | i [ / F(x)dx + jVG(y)dy]\
with F and G arbitrary functions, in which case (4.102) transforms to the separable
PDE
UXX + Uyy + F(X)UX + ^(y)Uy
(VA F ( , ) 2 + ^ 0
F'(re)
+ l_-£ P2 .
G(yf + . 0 ,
<?'(y)
where (re, y) = eax(sin ay, - cos ay).
In the separable case (ii), u may be linear superposition of separable solutions
X(x)Y(y), with
X"(x)+fi^P-X'(x)A
mdY"(y) + fi^-Y'(y) +
X = 0 (4.103a)
Y = 0 (4.1036)
where v is the separation constant. For the case v = 0,(4.103) can be solved exactly, giving
u = F(x)x^G(y)x^\li J F(xf~2dx + 72][73 J G(yf~2dy +14] . (4.104)

Symmetry Methods for Ad-hoc Techniques 157
In the particular case fi = 2, (4.103a, b) are constant-coefficient equations for XF
and YG with solutions
u = Ae»x + Be~»x M cos py + D sin py
u =
F(x)
(Ax + B) (My + D) F(x) G(y)
Acospx + Bsinpx
. W) . where A,B,M and D are constants.
and u =
G(y)
, for v = 0
G5O
, for u = p2 >0 (4.105)
(4.106)
forr/ = -)L42 < 0,(4.107)
4.2.5.3 Drying of a Heterogeneous Soil Between two Distant Water Bodies
W e can now construct an exact solution for the drying of a scale heterogeneous soil
situated between two distant water bodies, as depicted schematically in Figure 4.1.
W e assume that the volumetric water concentration obeys (4.88) and (4.98) with fi = 2
and that A(x, y) = F(x)G(y). The soil will be assumed to be dry at the top surface,
tf -co at y = 0 .
There is assumed to be an impermeable barrier, resulting in zero vertical water flux at y = 6
i.e.
* y = 0 at y = 6 .
Water is assumed to be supplied by distant bodies of water at large positive and large
negative values of re . Since we are interested mainly in drying patterns far from the water
bodies, we represent the latter by the simple boundary conditions
^ —> 0 as re —» +oo .
Now the solution (4.105) may be readily adapted to solve this problem. The boundary
conditions are satisfied with
7T (j. = — , M = 0,A>0andP>0.
26 (4.108)

Symmetry Methods for Ad-hoc Techniques 158
¥ = - eo (dry) evaporation
Figure 4.1: Streamlines (schematic) for steady unsaturated flow through a heterogeneous
soil from distant water bodies.
Without loss of generality, we assume that the coefficient D is absorbed in the x -
dependent factor X(x) of u. From (4.83) and (4.100) the soil water potential is
— 7
^ ' ^ = sm(py)(Ae^x + Be~^) '
This potential has a minimum at some location (XQ, 0 ) , which we may choose as the .
origin of the co-ordinate system. After this choice, A and B must be equal, so that
${x,y) = ijj cosec (py) sech (px) (4.109)
Just as in homogeneous soils [76], the solution to the steady flow problem with prescribed
flux boundary conditions is not unique as reflected by the free parameter A.
Similarly, the local hydraulic conductivity is
4A2
K(x,y) = cosh2(px) sin2(py) (4.110)

Symmetry Methods for Ad-hoc Techniques 159
and the horizontal and vertical components of volumetric moisture flux are
Vi = -2Apsinh(px) sin(py) (4.111)
and V2 = — 2Apcosh(px) cos(py) . (4.112)
Hence, the flow is purely vertical everywhere at the soil surface, matching the evaporation fr A
rate, whose minimum value, far from the water bodies, is —— . b
Remarkably, the flow pattern does not depend on the heterogeneous scale factor A(r).
Hence w e have an exact solution to a simple boundary value problem in a scale heterogeneous
medium, for which the flow pattern is the same as in a homogeneous medium, when the
geometric scale factor is an arbitrary separable function A = F(x)G(y). This result relies
on a single value of the separation constant v appearing in the solution (4.105). It would
not hold for other boundary conditions which would require linear superposition of solutions
with different values of v. Also it relies on K taking the particular form K* = 7 * 7 2 . W e
suspect that for other realistic K* (tf *) functions, the flux would depend weakly on the form
of A(r).
W e note however that although the potential tf is not affected by the heterogeneity, the
water concentration does depend on A(r) since
tf*(0) = *(r)A(r)
and 0 = *;1{*{T)\{T)).
4.2.5.4 Unsaturated Flow in Heterogeneous Soil Between Horizontal Plates
W e consider the problem of flow through scale heterogeneous soil between two horizontal
impermeable plates at y = 0 and y = y2 . Uniform suction potentials # = #i, * 2 are
applied at vertical planes re = rei, re2 . W e assume the linearisable model if* = 7 * 7 ^ and
w e consider the case of exponential scale factor
A = ecxeay , (4.113)
so that large variation in soil texture may occur. This is case i) of Section 4.2.5.2 in which
equation (4.102) has constant coefficients
uxx + uyy + ficux + fiauy = (1 - fi)(c2 + a2)u . (4.114)

Symmetry Methods for Ad-hoc Techniques 160
After defining (3cx ffay
v = ue 2 e 2 } (4.115)
equation (4.114) simplifies further to
vxx + vyy = k2v, (4.116)
where k2==(fi-2)
2(a2 + c2)
4 Zero normal flux at the plates implies
(2 - fi)a vy = 2 v at y = 0, y2 (4.117)
and prescribed potential at the endpoints implies
v = _^*}Hy2H-W2c(2H-0«y/2 at re = re*, * = 1, 2 . (4.118) li P/
The boundary conditions are simplified by defining
w = vv + f^r^l ow • (4-H9)
w x x + u)vv — k LO
Then a; satisfies
Jxx ~f~ ^j/y
subject to a; = 0 at y = 0, y2
and a> = 0 at x = xi,x2 .
This problem has the obvious solution UJ = 0.
Hence, we may transform back to the solution u:
u e-o.x + (1-/J)c* e^-^ay , (4.120)
7 tf \~p - tf where Cl = (1 _ } eCXl(/3_2) _ eCX2(/3_2) (4-121)
and C2 = ___ f tfi-, _ e^-2\jf0-^\ . (4.122)
(1 — fi) \ (ecxi(/3-2) _ ecx2(/3-2)) J v '

Symmetry Methods for Ad-hoc Techniques 161
From (4.100) this leads to a solution in which the potential varies only in one direction,
tf = 1-/3' 1 - / 3
7 cie-cx + c2e
( 1-^c z
i 1 - / 3
1 ._£_ X = - ^ (1 - fi)^e
2cx+(-2-^ay cie — CX + c2e
(l-/3)cx / 3 - 1
(4.123)
(4.124)
(4.125) and Vi = (2 - /3)ccie(2~^ay .
The mean flux, averaged in the vertical direction is
(4.126)
Hence, if this flow were maintained in an experiment, it would lead to a direct determi
nation of a representative global macroscopic value of hydraulic conductivity,
F1 = ££L[ C(2-/>)«I*_;L]. ay2
^ m e a s ~ tfx_tf2 • (4-127)
The question naturally arises as to whether this measured value agrees with a repre
sentative mean value K obtained by averaging K(x,y) throughout the medium. Here
we evaluate the two representative values of conductivity after choosing the relevant system
parameters, in an appropriate set of units of measurement to be
fi = 4, 7 = 1, tfi = -1, tf2 = -31/4, rei = 0, re2 = 5, y2 = 5 .
The overall degree of heterogeneity will largely be determined by the ratios crc2 and 1 1 ay2 of the apparatus dimensions rc2 and y2 , to the heterogeneity length scales - and - .
is (JL
In Table 4.1, we display mean and measured values of conductivity for various degrees
of heterogeneity, including the homogeneous case a = c = 0.
crc2
ay2
Kmeas
K
TABLE 4.1
0
0
0.59
0.65
-1
1
0.59
0.64
-5/3
5/2
0.41
0.63
-1
-1
4.37
4.69
-5/3
-5/2
60.3
92.8
-5
5
0.59
73.5

Symmetry Methods for Ad-hoc Techniques 162
W h e n cx2 and ay2 are small compared to 1, the two representative values of conduc
tivity are in reasonable agreement, given that the concentration-dependent conductivity can
vary by several orders of magnitude for a given soil and that similar variations in conductivity
occur between different soil types, even at the same moisture content [77]. With ay2 = +2.5
(as in the third and fifth columns of data in Table 4.1), it is clear from (4.124) that K varies
by a factor e 5 ( ~ 148) in the y -direction whereas the representative values Kmeas and K
vary by a factor of 1.5.
W e remark that in a saturated heterogeneous soil model studied by Philip [78], K also
consistently overpredicted -ftTmeas .
4.2.6. Summary
W e have demonstrated that nonlinear superposition principles may be discerned from
the structure of the Lie symmetry algebra of a PDE. This follows from the basic fact that
a superposition principle is in fact a global symmetry of a pair of equations. If this global
symmetry can be embedded in a Lie symmetry group, then w e demonstrate how to use well-
established infinitesimal methods to find the nonlinear superposition principle. For any first
or second order P D E in two independent variables, if a surjective superposition principle
exists, and it can be embedded in a differentiable manifold of NLSPs then the P D E must
in fact be linearisable. From established results on Lie symmetry algebras, w e are able to
explicitly extract the linearising transformation.
By explicitly constructing the full class of PDEs with a Lie group of NLSPs, w e arrive
at a single expression (4.46) for a class of second order variable-coefficient equations that
includes previously unconnected familiar linearisable equations such as the potential Burgers
equation,
Uy = UXX + Uy ,
the steady quasilinear unsaturated flow model
V • (D(9)S79) - aD(9)9y = 0,
and their generalisations. Practical applications of the latter were discussed in Section 4.2.5.

Symmetry Methods for Ad-hoc Techniques 163
Even if the superposition principle cannot be embedded in a manifold, its existence
implies a certain invariance operation on the existing symmetry algebra. W e show how this
can be used to find NLSPs that might not be embedded in a manifold. W e do however suspect,
that not many, if any, PDEs have NLSPs of the form (4.1) that cannot be embedded in a Lie
symmetry group. In Section 4.2.3, we considered the implications of the existence of just one
generating solution z(x), so that for every solution u(x) to the governing PDE, there exists
another solution v(x) such that u = F(v,z). W e believe that in most cases where NLSPs
of the type (4.1) exist, the P D E in fact has many generating solutions. The P D E would then
possess a symmetry with generator of the form
r = AWB(„)£.
(See Appendix 3). W e have not been able to find any P D E that possesses a symmetry of this
form, that has a N L S P not embeddable in a Lie symmetry group. If this is indeed the usual
case, then the task of finding superposition principles will be subsumed by the symmetry-
finding task. If not, then w e have already outlined a symmetry based method that will uncover
non-Lie superposition principles.
4.3 Symmetry Methods for Equation Splitting
4.3.1 Background
In [58], Ames split the boundary layer equation
UyUXy — UXUyy = UUyyy (4.128)
into the system {Uyyy = 0
(4.129)
UyUXy UXUyy — VJ
so that at least one of the equations in the system, could be solved in general. He substituted
the solution to (4.129)2 , namely u = F(y + G(x)); F,G arbitrary, into (4.129)i to find,
if possible, a common solution. He thus found the solution
u = a(y + G(x))2 + 6(y + G(re)) + c

Symmetry Methods for Ad-hoc Techniques 164
where a, 6, c are constants and G is an arbitrary function of x, to the system (4.129), which
is also a solution to (4.128).
As a further example, the PDE
(ux u\ . . uxx -ut + uux + uxt = ut ( 1 (4.130)
can be split into the solvable system
uxx = ut - uux (Ux U}
uxt = ut\ -\ . U 2)
(4.131)
From (4.131)2 d (u
dt\u)'~ '2
so that u2
ux-f(x)u = -—, (4.132)
where / is an arbitrary function. Solving the Bernoulli P D E (4.132), we find
incorporating arbitrary functions -F(re) and h(t).
Substitution of (4.133) into Burgers' equation (4.131)i, we find that F and h need
to satisfy
F'"(x)F(x) + 2F'"(x)h(t) - F"(x)F'(x) + 2F'(x)h'(t) = 0 . (4.134)
Differentiating (4.134) with respect to t we find
„,, / = -TTTT = a ; constant. (4.135) F'(x) h'(t) ' v '
Solving (4.135) for F and h, and then checking these solutions in (4.134) we find for
a = 0 ; F = Cx2+Dx + E ; h = Ct,
a > Q ; F = Ce^x + De'^x -2m ; h = Ke~at + m , (4.136)
Q, < Q ; F = Ccos\/-«rc + Dsiny/^ax — 2m; h = Ke at +m ,

Symmetry Methods for Ad-hoc Techniques 165
where C, D, E, m and K are constants.
Hence, using (4.133) and (4.136) we find solutions to (4.130).
Although w e have managed to find solutions to (4.128) and (4.130) by splitting the PDEs
into overdetermined systems, it is obvious that not every 'split' of a P D E will necessarily lead
to a compatible solution.
In this section, w e aim to split single PDEs into a system of PDEs, and then use the
classical symmetries of this system to find solutions to the original PDE. From a broader
perspective, this approach may be regarded as embedding the original equation in a larger
system of PDEs by adding a side condition with a special property. In the most general scheme
of solution via differential constraints ([79], [8]), one merely requires the side condition to
be compatible with the original equation. As overdetermined systems have integrability and
compatibility conditions that have consequences for the analytic solution of the system, we
use the package diffgrob2 [80], which generates these conditions of nonlinear overdetermined
systems. The package often casts the systems into forms simpler to integrate or analyse. As
an example, chosen merely to illustrate the use of diffgrob2, the Fitzhugh-Nagumo equation
uxx = ut - ^(1 - u2) (4.137)
can be split into the system
uxx = f(t)uxx + g(t)ux u (4.138)
ut - 2 (1 _ u2) = f(t)uxx + g(t)ux .
Whereas (4.137) has only the classical translation symmetries generated by the vector fields
— d -dx dt symmetry with generator
a n d _ , the system (4.138) with f(t) = e, g(t) = et/2-e~t/2 has the added classical <9re dt
ith generator
However, the compatibility conditions for (4.138) found by using diffgrob2 imply
ux = 0
u(l-u2)

Symmetry Methods for Ad-hoc Techniques 166
so that the only solution to (4.138) is
1 u = •y/l + Be-*
where B is constant.
In Section 4.3.2 we choose the side condition so that the enlarged system of PDEs has a
larger classical Lie symmetry group than that ofthe original PDE. W e then use the additional
symmetries to obtain new reductions of variables. In Section 4.3.3, the side condition is
chosen so that the enlarged system of PDEs has a common group with the original PDE.
Finally, in Section 4.3.4 we demonstrate how known nonclassical symmetries can be used
together with equation splitting.
The emphasis on classical symmetry techniques again has the advantage that existing
automated computer algebra based symmetry packages can be used to indicate the possible
reductions of variables. W e use the automated computer algebra package D I M S Y M [3] to
help find the symmetry algebras of the PDEs.
4.3.2 Additional Symmetries for a Larger System of Equations
In the previous section we showed how embedding a single PDE in a larger system of
equations, may increase the size of the symmetry group. As a further example, the P D E
(4.130) has only the classical translation symmetries generated by the vector fields — and
— . However the system (4.131) has the added symmetry with generator dt
r = '4y2ti+ul- (4139> Using (4.139) w e find the solutions
4re , 2 u = —r and u = —
x2 + 2t x
to the system (4.131) and hence also to the P D E (4.130). W e now concentrate on applying
this same method to the axisymmetric boundary layer equation, and show that by using this
method, w e can recover the solutions to this P D E that were found in [81].

Symmetry Methods for Ad-hoc Techniques 167
In [81], Burde outlines a new ad-hoc technique for finding explicit similarity solutions
of PDEs. The technique is a variation of the direct method developed by Clarkson and
Kruskal [10] (see Section 1.1.4), whereby a similarity form of the solution is substituted
into the PDE. However, whereas with the usual direct method, one imposes the requirement
that the substitution leads to an ordinary differential equation, Burde instead imposes the
weaker condition that the substitution of the similarity form be reduced to an overdetermined
system of O D E s which can be solved in closed form. Using this new technique, Burde
finds interesting new solutions to the boundary layer problem which cannot be recovered
by using the standard Lie group method of infinitesimal transformations or its nonclassical
generalisations. However, w e show that Burde's solutions and some others, can be recovered
by splitting a single P D E into a system of PDEs with a larger Lie classical symmetry group
and then using the classical symmetries of this system.
W e also show that two other solutions thus found can again not be recovered by using
the classical and nonclassical methods of group invariant solutions.
The axisymmetric boundary layer equations take the form
Udx Vdr~ U\dr2 rdr) ^UQ^ du dv v dx dr r
where U = U(x) .
Idib I dip r2 . ,A , An, Defining new variables u = -^- , v = — — and /*; = — , equation (4.140) becomes
° r dr r dx 4 VvVVx ~ V>x W ~ 4UU' = 2v (/Ww + Vw) • (4-141)
A solution to (4.141) given in [81] is
ip =2v (2x + <f>(x)F(ri))
» J.H y (4-l42) where * = 777^2 + <t>(x) >
(<f>(x)) 2
F(r)) = cq--V
and U(x) = <Kx) "

Symmetry Methods for Ad-hoc Techniques 168
In [81], Burde shows that this similarity solution cannot be obtained by considering classical
and nonclassical symmetries of (4.141). The special case of 0(re) = xn is used to illustrate
this point.
Here, w e show that the similarity solution (4.142) can be obtained by considering the
classical symmetries of the system
VvV>xM - -0xVw - 4UU' = j(x)ii>nw + M z ) V w
2KVW + Mi/*/*) = j(z)Vw + Kx)^w
vc
(4.143)
with U(x) = 4>{x)
W e note that all the solutions of the system (4.143) are solutions of (4.141).
For particular functions j and h of re, the system (4.143) has more classical symme
tries than those of the original equation (4.141). Here we list some examples and give the
corresponding solutions to (4.141).
(a) ?'(re) = A(/)'(x)((l)(x))rn and h(x) = d with A, m, and d non-zero constants.
The system (4.143) then has the additional symmetry generator:
r =: (?£*£) A + [ C2 (i + -)p + A c^ m
\4>'m) dx \ \ m) 2v
2#" (<j)')2m
+ (C2^ + C2d{X-lj)+a)-k where C2 and a are constants.
The corresponding similarity solution is
+ 1 2 m
d_ dp
(4.144)
a ii> = -dx--+<l>T(x)f{Z) c2
where (4.145)
e = 0-
Substitution of (4.145) into (4.143) gives the following ordinary differential equations for / :
2Af" + mff" + 2(/')2 = 8,v2c2
'i-£)r+er = o (4.146)

Symmetry Methods for Ad-hoc Techniques
The general solution of (4.146)2 is
f(0=p^+1 + K + q ; d±-2v
= -plog£ + 6£ + g ; d=-2v
169
(4.147)
where p, b, q are constants. Substitution of (4.147)i into (4.146)i gives some particular
restrictions on the constants involved. Using these together with (4.147)i and (4.145), we
obtain the following solutions to (4.141):
(i) d = -4i/, m = 2, 6 = +2vc, q = 0, p = 2A
In this case a ip = Aux h 2<f>(x) c2
A*
A ;
i=^~YA-where
When A = -2v, then this is the solution (4.142) given in [81].
(ii) d = 2v, m = —4 and 62 = 4z/2c2 + 4pg .
Then we obtain the solution
iP = -2vx-- + (<P(x))-2f((L) ci
where
- 3 J /
£=0/*"2^"V
(iii) d = 4z/, m = - 3 , 6 = 0, q = 0 and p =
and /(£) = p£2 + \l±v2c2 + 4pg £ + 9
2z/2c2
3i4 In this case
2„2 a 2v*c ip = -4,vrc - — + — —
c2 3 4
A* A_<p_ 2v<p3
(4.148)
(4.149)
(4.150)
Also, using (4.147)2 , we obtain the solution
a ip = 2vx + (f)^ (x) [ ±2vc£ + q] c-2
(4.151)

Symmetry Methods for Ad-hoc Techniques 170
where £ = (p~2^~1p - —<fy:~x<p' . /lis
This is a particular case ofthe more general solution (4.155).
(b) j(x) = A<p'(x)((p(x))m and Ai(re) = 2v with A and m non-zero constants .
The system (4.143) then has the additional symmetry generator
r<S)M-+^+^>-d_ dp
+ {C2^+2C2V{x-ij)+a)lp (4.152)
where k is an arbitrary function of re .
Using (4.152), we find the following solution to (4.141):
<P =-2vx - ^ A (cf>(x))-2 f(0 C2 (4.153)
where £ = 4>p — q(x)
and /(£) = p£2 + y/kv2c2 + 4pd £ + d with q an arbitrary function of re, and with p and
d constants.
(c) j(x) arbitrary and h(x) = 2v .
The system (4.143) then has the additional symmetry generator
r = *<*>!; + £ (4-154)
where k is an arbitrary function of re .
Using (4.154), we find the solution to (4.141)
</> = (±V4(f/(re))2 + a) /x + /(re)
Ais2c2
l^-^WxW2+a]^'m (4.155)
where / is an arbitrary function of re .

Symmetry Methods for Ad-hoc Techniques 171
(d) j(x) = A4>'(x) and h(x) = d with A and d non-zero constants.
The system (4.143) then has the additional symmetry generator
- ( <f>\ d ( (c4<p<P" \ A<f/\ d
+{-c*4+a)i-(4.156)
However, using (4.156) we simply get a particular case ofthe more general solution (4.155),
namely
iP = 2vx + — log0+2,vc (^ - — ^ + q , (4.157) C4 \(p 2u (p J
where q is constant.
Equation (4.141) can obviously be 'split' in an infinite number of ways. In this section we
have considered only the particular split of the type (4.143). In fact classical and nonclassical
symmetry analysis on different splits will produce different solutions. For example, consider
the split
V'X^XM - i>xipw - ±UU' = g(x, A O V W + k(x)^w
2v (Mw + Vv) = g(x, AO^W + M OVw
where U(x) = -—(x — c) . Li
W e can show that when
, . n 2vL ... . g(x, p) = 2vp + — 0 (re)
and k(x) = 2v + 2u<f/(x) ,
both equations in (4.158) have the additional symmetry generator
r = x*-c)A + (fn*)y*))l
+ (c2ip + 2c2v [(c - x)<p'(x) + <p(x)] + a ) —
from which we get the solution to (4.141):
(4.158)
$ = -2v<P(x) + (re - c)/(£)
where £ = 7 + ^ (4.159) Li X
and /(£) = 2v {Ae~^ + A£ - 3) .

Symmetry Methods for Ad-hoc Techniques 172
This is the second solution found in [81].
These are Not Classical or Nonclassical Symmetries
In [81 ], Burde showed that the new similarity solution (4.148) found for equation (4.141),
cannot be obtained by considering similarity reductions of (4.141) by the Lie group method
of transformation or by the nonclassical method of group invariant solutions. W e now show
that the solutions (4.149), (4.150) also cannot be found by considering similarity reductions
of (4.141) by the classical and nonclassical method of group-invariant solutions.
From (4.144) we find the global form of the 1-parameter group of transformations
associated with the similarity reductions ofthe solutions (4.148), (4.149) and (4.150), namely
*
x = cj)-l{(P(x)e^e\
<P'[r1{cx{x)e^))]cPm(x)t yL* = Y
U'U~i ^(x)e^£)^\d>m(x)e2r^
+ [p-^'r)e<1+^> 2c
(4.160)
^* = _d(£-i 0(a;)e^e - — + f ^ + dx + -) eC2£ .
L -I c2 \ c2J
Substitution of (4.160) into
^x*M* " *l-1>>r ~ W{x*)U'{x*) - 2v(p*%^*»* + V^.) = 0 (4.161)
vc where U(x) = —7-7-
<P(x) gives
ip»ipx» - ipx*Pw - *UU' - 2i/(/xVw + ^ M )
J. <P'(x) _ C 2 £ + ^ £ \ p = 0 (4.162)
(p' U-1 (P(x)e^e )
where P = ^ (2Z^ ~ A(<l>(x))m </>'(x)) + (2v - d)^M .
For the solution (4.148), (4.162) becomes
P = ^W (2^ + 2v(<P(x))2<t>'(x)) + 6^ , (4.163)

Symmetry Methods for Ad-hoc Techniques 173
(which agrees with the result in [81] for cp(x) = xn ).
For the solution (4.149), (4.162) becomes
P = <AW (2*^ - Acp-4(x)<p'(x)) , (4.164)
and for the solution (4.150), (4.162) becomes
P = %w [2vp - Ac/)-3(x)(P'(x)) - 2i/W • (4-165)
Thus the group (4.160) does not map solutions of (4.141) to itself and so the similarity
reduction in (4.148), (4.149) and (4.150) cannot be obtained by the classical Lie group method
of transformations.
It is also obvious that the auxiliary equation P = 0 cannot be obtained from the invariant
surface condition
i.e.
2c2cp . (. 2 \ Ac2(p'cp l Ajn
•Ipx + < C2p 1 + - + (p'm \ rnJ Iv
2(P<f>" 1 2 + 1-((p')2m m ^M
J 2 <P\ = c2ip + c2d re — + a ,
\ m<p' J
(4.166)
where for the solution (4.148), we have m = 2, d = — Av, A = —2v ; for the solution
(4.149) m = - 4 , d = 2v and for the solution (4.150), m = -3, d = 4i/.
Thus our solutions are unobtainable by the nonclassical method [7] or by the direct
method [10] whose solutions, as mentioned in Section 1.1.4, are a subset ofthe nonclassical
solutions (see [13], [11], [15]).
Hence we have shown that Burde's solutions and some others can be found by classical
symmetry reductions of a larger system of equations that has the original boundary layer
equation embedded. This system is chosen so that it has a larger symmetry group than that of
the original single equation. Obviously, this method could be applied to solve other nonlinear
partial differential equations.
W e do not wish to leave an impression that all similarity solutions can be obtained by
standard symmetry techniques. The possibility of new reductions by differential constraints

Symmetry Methods for Ad-hoc Techniques 174
remains open [79]. However, by the simple device of adding symmetry-enhancing con
straints, we can obtain new solutions that were previously thought to be unrelated to classical
symmetries. Naturally, this technique may be broadened by expanding the class of allowable
symmetries to contact symmetries and nonlocal symmetries.
4.3.3 Common Symmetries for a Larger System of Equations
Some PDEs may have non-trivial symmetries, which although reduce the PDE, result
in a quotient P D E or O D E that is still difficult to solve. W e now consider such PDEs of two
independent variables possessing a non-trivial symmetry generator T. W e split the quotient
ODE
Y^aiTfc, <f>, (/>', <f>",...) = 0, (4.167) i
where z and <p are tne invariants corresponding to T, into the system
YJfiiTi(z,<P,(P',cP",...)=0 1 (4.168)
i
where fi is not a multiple of a , and Ti are linearly independent functions (e.g. monomi-
als).
W e use diffgrob2 [80], to determine constants fii such that the system (4.168) is com
patible and also to give the integrability and compatibility conditions of the system.
Note that this procedure is equivalent to splitting the original P D E into a compatible
system where each equation in the system also possesses the symmetry with generator V.
Example 4.9
Consider the boundary layer equation
UyUxy UXUyy = Uyyy ,
which admits the classical symmetry generator
d d
T = u—+x—. du dx
(4.169)
(4.170)

Symmetry Methods for Ad-hoc Techniques 175
Using (4.170) the PDE (4.169) has a similarity solution
u = x(f>(y) , (4.171)
where <p satisfies
0"'(y) = (0'(y))2 - <KvW(v) • (4-172)
We now look for a compatible split of (4.172) of the type
acP'"(y) + b(cP'(y))2 + k<f>{yW(y) = 0 (4.173)
(1 - aW"{y) + (-1 " b)(<P'(y))2 + (1 - k)<P(y)<P"(y) = 0
where a, 6 and k are constants.
Use of diffgrob2 indicates compatibility for
a = 1 , 6 = -3 and k = 2 , (4.174)
and for these choice of constants gives the further conditions
-0 W " 6(0? = 0
2(4>')2 - <P<P" = 0 (4.175)
f + («//)2 = 0 .
Solving (4.175) we find <p(y) = , and hence from (4.171) we find the solution y + 7
u = -^- (4.176) y + 7
to (4.169).
We note that the system (4.173), with choice of constants as in (4.174), corresponds to
a split of the PDE (4.169), which might for example have been
Uyyy OUyUXy "T ^UxUyy — U
ZUyUXy UXUyy == U .
Diffgrob2 also indicated that the choice of constants a = 2, k = 1, 6 = 0 leads to
a compatible system (4.173). However this choice of constants leads to the same solution
(4.176).

Symmetry Methods for Ad-hoc Techniques 176
Example 4.10
The PDE
. «t 2
has a classical symmetry with generator
2 uxt u\ uxx=ut-vr [ — + - I (4.177)
r\ r\ r\
r = -x^z-2t^+u^r. (4-178) <9rc dt du
and thus a similarity solution
U = 7!^); Z = 7I (4'179)
where (p(z) satisfies
00" + zcP'cP" + ^(0')2 + z<P'<P + ^ + 2020'
+ *020" +103^' + = o (4.180)
We look for a compatible split of (4.180) of the type
f C i # " + C2Z<P'<P" + C322(0')2 + C4Z<P'<P + C50
2
+C6020' + Cy^V + C8Z0
30' + C904 = 0
(1 - ci)U" + (1 - ca) W + (| - ca) *2(0')2 + (1 - c4)^V + (| - c5) 0
+(2 - c6)020' + (1 - c7)*0
20" + (| - c8) *030' + (| - c9) 0
4 = 0 (4.181)
where Ci,i = I.. .9 are constants.
Use of diffgrob2 indicates compatibility when
ci = 2, c2 = 0, c3 = 0, c4 = 1, c5 = 1,
CQ = 2, c7 = 0, c8 = 0 and eg = 0 ,
i.e. the system
200" + 20,0 + 02 + 2020' = O
-00" + zcP'cP" + 4 (0')2 - £ + *020" + *£0' + £ = ° •
(4.182)
(4.183)

Symmetry Methods for Ad-hoc Techniques 177
For this system, diffgrob2 gives the extra compatibility condition
(2z + z3)(P2 - (6z2 + 4)0 + 8z = 0 . (4.184)
Solving (4.184) we find
M*) = ZYZ^ » Z • (4-185) A\z_ 2
z^+2 ' ~z
Hence from (4.179) and (4.185) a solution to (4.177), with ut ^ 0, is
4rc u = x2 + 2t
The system (4.183) corresponds to a split of the PDE (4.177) which among others include
It u2
uxx -ut = —uut H X X
2uxt u3 2t u2
-u — = — uut H . ut 2 x x
4.3.4 A Use of Nonclassical Symmetries in Equation Splitting
We can always find a nonclassical symmetry of a PDE, if the latter can be split into a
system comprising of another PDE with its nonclassical invariant surface condition.
We suppose that a PDE
A(x,t,u,ux,ut,...) = 0 (4.186)
has a nonclassical symmetry with generator
T=xi+Ti+Ui' (4187> and corresponding invariant surface condition
Xux+Tut = U, (4.188)
where X, T and U are functions of re, t and u.
Then any PDE that can be split into a system comprising of equations (4.186) and (4.188)
will also have the nonclassical symmetry generator (4.187).

Symmetry Methods for Ad-hoc Techniques 178
Example 4.11
The PDE
uxx = ut + u£ (4.189)
has a nonclassical symmetry with generator
V- — — — - 3 — ~ y/2Udx + dt ~ 2U &a
[40], with corresponding invariant surface condition
(4.190)
3 o 3 Ut = --U - —7=UUX
Hence, the PDEs
(4.191)
uxx = — - V2uux
u3 3 and uxx = — T=UUX
2 yj2
(4.192)
(4.193)
among others, which can be split into the system comprising (4.189) and (4.191) will also
have the nonclassical symmetry generator (4.190).
From (4.190)
1 ' = 3
re2 v rc
~Y + ~~u~ 0|s-^
Performing a hodograph transformation on (4.192) we have
Atxtxutu — tuutx txxtu — ~tu — y/Zutxtu = 0 .
(4.194)
(4.195)
Substitution of (4.194) into (4.195) gives
y/2 (p"(z) = 0 where z = x
u
Hence <p(z) = cz + d where c and d are constants. Then from (4.194) we find a
solution to (4.192) is
1 * = 3
\/2rc / ( A/2
' 2 + - \c\ x u
+ d (4.196)

Symmetry Methods for Ad-hoc Techniques 179
Similarly we find (4.196) is a solution to (4.193).
Example 4.12
Suppose that the reaction-diffusion equation
uxx =ut+ all(u) (4.197)
has a nonclassical symmetry with generator
r = ! + *(*,*, «)A + ^J!., (4.198)
with corresponding invariant surface condition,
ut + X(x, t, u)ux = U(u) . (4.199)
Then the nonlinear convection-diffusion equation
uxx = (1 + a)ut + aXux
which can be split into the system comprising of (4.197) and (4.199), will also have the
nonclassical symmetry generator (4.198). This allows us to obtain solutions to nonlinear
convection-diffusion equations from known solutions to reaction-diffusion equations. The
solution (4.196) to Burgers' equation (4.192) is a particular example.

Chapter 5
Conclusion
In this thesis, we have used symmetry methods as our main tool for finding solutions
to many partial differential equations. W e have found that Lie's classical point symmetry
method continues to be successful in obtaining new symmetry reductions and exact solutions
to P D E s of topical interest, such as equations (2.1) and (2.79) when the functions / and o
are of power law or exponential form. The use of symmetries also indicated the existence of
a class of linearisable P D E s (2.14), (2.80) with nonlinear degenerate diffusivity depending
on both concentration and concentration gradient.
In the important Cauchy problem of degenerate diffusion with step function initial con
ditions, classical symmetries have enabled us to obtain explicit solutions, whether or not the
degree of degeneracy forces these to be discontinuous for a finite length of time.
B y using a well-known similarity reduction w e were also able to construct an exact
solution of (2.43) in the case of supercritically degenerate diffusion i.e. D(ux) decreasing
faster than ux2 . This solution is the only known exact solution displaying this phenomenon.
In comparison, w e provide an exact solution in the case of critically degenerate diffusion
D(ux) = u~2 , where the solution is continuous for all time t > 0.
Beyond potential and contact symmetries, conditional symmetries hold much promise
for finding further symmetry reductions for some PDEs (as was found by Clarkson and
Kruskal [10] using the direct method). Even a small number of new solutions can make the
extra effort of nonclassical symmetry analysis worthwhile. However, these analyses do, in
general, involve a large quantity of mostly routine, although sometimes complicated, calcu
lations on nonlinear determining relations, which in fact may lead to no strictly nonclassical
symmetries (see e.g. Section 3.5.1). Hence a method for determining, a priori, whether
strictly nonclassical symmetries exist, would be very beneficial, as would any method that
enabled us to avoid some of the laborious steps in their identification. In Section 3.3, w e
introduced a new approach to determine strictly nonclassical symmetries, whereby w e do not
need to solve either the classical or the nonclassical determining equations fully. The method

Conclusion 181
can, to a fair extent, reduce the amount of work required in finding these symmetries.
W e have also illustrated in Section 3.5 how the generalised conditional symmetry (GCS)
method can lead to new symmetries beyond the nonclassical method. It is possible that this
method will lead to new solutions of many more evolution equations. However, a major
disadvantage of this method is that the G C S must assume a particular ansatz, because the
method does not determine the dependence of the symmetry on ux .
The G C S method is a good example ofthe type of advancement in recent years in the area
of symmetries. M u c h of the progress in this area has been at the margins, involving somewhat
ad-hoc extensions of Lie's method. Olver's method [79] of differential constraints, gives a
broader perspective and thus does look promising. Unfortunately, so far, it is too general to
be implemented to find new solutions to many practical problems.
In this thesis, w e have also taken a fresh look at traditional ad-hoc methods from a
symmetry perspective. Ad-hoc methods, in general, are made more powerful when they are
incorporated in systematic symmetry methods, as it enables symmetry packages, based on
the more clearly defined Lie algorithm to be used in applying them.
W e have demonstrated that Lie symmetry algebras can be used to find nonlinear su
perposition principles (NLSPs) for nonlinear PDEs. As well, w e show that if a surjective
N L S P exists and it can be embedded in a differentiable manifold of NLSPs, then the P D E
is linearisable and w e provide the linearising transformation. W e were also able to derive
a single expression for a class of integrable second-order variable-coefficient equation by
explicitly constructing a full class of PDEs with a Lie group of NLSPs. This was used to find
new exact solutions for fluid flow in scale-heterogeneous, unsaturated porous media.
The ad-hoc technique of equation-splitting was also considered. The question of how
one might split an equation so that the resulting system is compatible and solvable still
largely remains unanswered. In our attempt to shed some light on the question, in Section
4.3.2, w e split PDEs with only trivial symmetries (with major emphasis on the axisymmetric
boundary layer equation), into a system of PDEs which possessed a larger symmetry group.
This technique on its own does not guarantee compatibility. However, these systems can be
checked by programs such as diffgrob2 [80], for integrability and compatibility conditions.
Solutions can then also be found by using the extra symmetries. Using this method, w e were

Conclusion 182
able to recover the solutions to the axisymmetric boundary layer equations found by Burde
[81].
A s well, in Section 4.3.3 w e showed how the technique of equation-splitting can be useful
on those P D E s which possess non-trivial symmetries. As it is often found that a symmetry
can reduce a P D E to a quotient equation that is difficult to solve, w e showed how it is possible
to split a governing P D E into a larger system which also posesses the same symmetry, and
yet this symmetry can then lead to simpler quotient equations to solve. In that way, invariant
solutions, which otherwise might not be obtainable, can be found explicitly.
It is possible that the usefulness of symmetries in applying ad-hoc techniques is not
confined to that of finding separable co-ordinate systems [82], NLSPs and equation splits.
W e believe that there is scope for more investigations into the possible roles that symmetries
play in establishing the foundations for many other ad-hoc techniques.

183
Appendices
Appendix 1
In this appendix we outline the procedure by which equations (3.15)-(3.17) together with
(3.11) 3 and (3.11)4 are solved.
Differentiating throughout (3.15) with respect to x and (3.17) with respect to y, we
have Xtx + kiXxXx + kiXXxx = 0
(Al.l) Yty + hYyYy + klYYyy = 0.
Subtracting these two equations we have
XXXX - YYyy = 0 (A\.2)
as ki^O.
Also, differentiating throughout (3.15) with respect to y and (3.17) with respect to x, and
adding the resulting equations, we have
XXXy + YYxy = 0 . (A1.3)
Multiplying throughout (A 1.2) by Yxy and (Al.3) by Yyy and adding these resulting equa
tions, for X ^ 0 we have
•X-XX*xy + -&Xyiyy = O . ^/il.4J
Now using (3.11) 3 and (3.11) 4 , from (A1.4) we have
v-2 _i_ v2 = D xy ' xx
so that Xxy = 0 and Xxx = 0. From this, together with (3.11) 3 and (3.11) 4 , we can
deduce that X = xf(t) + yM(t) + L(t) ]
>
Y = yf(t) - xM(t) + J(t) J
for some functions /, M, L and J of t. If also we know that
(A1.5)
X = N(x,y)Y

184
(which is true if Xt + 2XXx = Y% + 2YYy ) then from (A1.5) we have X Y
X = (aire + a2y + a3)fi(t) (A1.6)
Y = (axy - a2rc + a4)fi(t),
where ai,a2,a3 and a4 are constants. Substitution of (A 1.6) into (3.15) yields
/i(£) = 71 vT7~ ' c constant. (k\a\)t + c
Appendix 2
In this appendix we show that for first and second order PDEs of two independent
variables, if the solution h(x, y,u) to a system of n(> 1) determining equations can be
expressed as h(z, u), where z is a solution to the PDE, then each determining equation must
have coefficients in z and u alone.
As h(z, u) is a consequence of the system of determining equations, each equation in
the system must admit the particular solution h(z, u) and hence it is sufficient to examine a
single determining equation admitting such a solution.
I. First Order PDE of Two Independent Variables
From Section 4.2.2.2. part (a), the most general first order determining equation is
ai(x, y, u)g(z)hz + a2(x,y,u)hu = a3(x,y,u)h (A2A)
with general solution a d z f ai(x,y,u) \ a^*'v'u\du
g(z) J a2(x,y,u) J
for g 0, a2 ^ 0 and 0 arbitrary,
/jj) h __ A(z)e-f «2(^v!«)du for a\ = 0 or g = 0, a2 ^ 0 and A arbitrary,
(A2.2)
(iii) h = B(u)e$ «r<».v.«m«>dz for a 2 = 0, on 0 and g 0.
Therefore for a solution /i(z, u) with hz 0, we require

185
in (i) a3{x^U
in (ii)
in (iii)
a2(x,y,u
a3(x,y,u
a2(x,y,u
a3(x,y,u
, ai(x,y,u) , _ and — - '- to be functions in u alone,
a2(re,y,u)
to be a function in u alone, and
to be a function in u alone. ai(re,y,u)
Hence in each of the above cases, (A2.1) can be written with coefficients in u and z.
As well, no matter how many determining equations the PDE has, from the possible solutions
(A2.2), we see that each equation must have coefficients in u and z alone.
II. Second Order PDE of Two Independent Variables
From Section 4.2.2.2 part (b), the system of determining equations would have
hzz = k(z)hz (A2.3)
ji0(x,y,u)hzg(z) + -yn(x,y,u)hu + Ji2(x,y,u)huu =-yi3(x,y,u)h (A2A)
and possibly
fij (re, y, u)hu + h = aj (re, y, u) ; aj arbitrary (A2.5)
i = 1... p, j = 1... m for some p, m > 1 .
From (A2.3), we have
h(z, u) = A(z)B(u) + R(u) (A2.6)
where
A(z)= f Jk{z)dzdz. (A2.7)
Substitution of (A2.6) into (A2.5) implies
Pj(x,y,u)B'(u) + B(u) = 0
and pj(x,y,u)R'(u) + R(u) = aj(x,y,u) , (A2.8)
so that for each j, Pj (re, y, u) and aj (re, y, u) need to be functions in u alone.
We now consider (A2.4). Without loss of generality, if 7i0 ^ 0 for some i, we can
take 7»o = 1 • For these e(luations with 7io = 1, then on substitution of (A2.6) into (A2.4)

(A2.9)
186
we find that
lii(x,y,u)B'(u)+^i2(x,y,u)B"(u)-^i3(x,y,u)B(u)
= XiB(u) ; Xi constant,
so that if Af 0, then 7^1, ji2 and ji3 need to be functions of u alone.
If Xj = 0 in (A2.9) then we would require
7ii =ai(x,y)pn(u)
7*2 = ai(x,y)fii2(u) (A2.10)
and ji3 =ai(x,y)fii3(u) .
However, if Xi = 0 then we find that either g = 0 or A' (z) = 0. As A' (z) is not possible,
then o = 0 and so each such determining equation includes coefficients that depend only on
z and u.
Finally, if 7io = 0 for some i in (A2.4), then we find
7ii(rc, y, u)B'(u) + li2(x, y, u)B"(u) - 7*3 (re, y,u)B(u) = 0 ,
so that the coefficients 7^1, 7^2 and 7*3 are as in (A2.10), and the determining equations
again have coefficients in z and u alone.
Hence, if the system of determining equations of a second order P D E in two independent
variables admits a solution h(z,u), then the coefficients in the determining equations must
be in z and u alone.
Appendix 3
In this appendix we show that a P D E with a nontrivial symmetry group and possessing
a surjective NLSP, must also possess a symmetry with generator
r = AWB(„)iL.
We denote the NLSP by u = F(v, z). Because ofthe assumed surjectivity property, for any
two solutions u(x) and z(x), there exists a suitable v(x).

187
If the P D E has the symmetry generator
r-E*£ + "!;. <9re,: du
then we would have a new symmetry [23],
u = F(v,z + e U(x,z)-Yxi(x^z)zxi
u + eU(x,u,uXi) + Q(e2)
dF where U(x, u, uXi) = -«-(«, Z) U(x,z)-Yxi(x'z)zxi
W e can write
so that
U(x,u,uXi) = f(u,z)h(x,z,zXi)
f{u, z) = U(x,u,uXi)
+ 0(e2))
(A3A) h(x,z,zXi)
If there are so many possible generating solutions z(x), that z and x may be regarded
as independent variables, then (A3.1) indicates that X = 0 and that U (and h) must be
separable, U = A(x)B(u). The PDE would then have to possess a symmetry with generator
of the form
(A3.2) r = A(x)B(u)Yu

188
Publications Associated with this Thesis
1. GOARD, J. M. & BROADBRIDGE, P., Nonclassical Symmetry Analysis of Nonlin
ear Reaction-Diffusion Equations in Two Spatial Dimensions, Nonlin. Analysis:
Theory, Methods and Applications, 26, 735-754 (1996).
2. ARRIGO, D. J., GOARD, J. M & BROADBRIDGE, P., Nonclassical Solutions are Non-
Existent for the Heat Equation and Rare for Nonlinear Diffusion, /. Math. Anal.
Applic, 202, 259-279 (1996).
3. GOARD, J. M., BROADBRIDGE, P. & ARRIGO, D. J., The Integrable Nonlinear Dif
fusion Equation ut = (f(u)/ux)x and its Relatives, /. Appl. Maths & Physics
(TAMP), 47, 926-942 (1996).
4. BROADBRIDGE, P., GOARD, J. M. & LAVRENTIEV JR, M., Degenerate Nonlinear
Diffusion with an Initially Sharp Front, Stud. Appl. Math., in press.
5. GOARD, J. M. & BROADBRIDGE, P., Nonlinear Superposition Principles Obtained by
Lie Symmetry Methods, J. Math. Anal. Appl., in press.
6. GOARD, J. M. & BROADBRIDGE, P., Exact Two-Dimensional Solutions for Steady
Unsaturated Flow in Scale-Heterogeneous Porous Media, Math. Comp. Modelling,
26 (3), 44-54 (1997).
IN PREPARATION
7. GOARD, J. M. & BROADBRIDGE, P., Higher Order Similarity Reductions Via Expanded
Symmetry Groups of Larger Systems, Appl. Math. Lett.

189
Bibliography
1. KERSTEN, P. M. H., Infinitesimal Symmetries: A Computational Approach, Centrum
voor Wiskunde en Informatica, Amsterdam (1987).
2. SCHWARZ, F, Symmetries of Differential Equations: from Sophus Lie to Computer
Algebra, Siam Review, 30, 450-481 (1988).
3. SHERRTNG, J., Dimsym Users Manual (Melbourne: La Trobe University) (1993).
4. NOETHER, E., Invariante Variationsprobleme. Nachr. Konig. Gessell. Wissen.
Gottingen, Math.-Phys. KL., 235-257 (1918).
5. BOYER, T. H., Continuous Symmetries and Conserved Currents, Ann. Phys, 42,445-466
(1967).
6. FOKAS, A. S., A Symmetry Approach to Exactly Solvable Evolution Equations, /. Math.
Phys., 21, 1318-1325(1980).
7. BLUMAN, G. W & COLE, J. D., The General Similarity Solution of the Heat Equation,
/. Math. Mech., 18, 1025-1042 (1969).
8. OLVER, P. J. & ROSENAU, P., The Construction of Special Solutions to Partial Differential
Equations, Phys. Lett., 114A, 107-112 (1986).
9. OLVER, P. J. & ROSENAU, P., Group-Invariant Solutions of Differential Equations, SLAM
J. Appl. Math., 47, 263-275 (1987).
10. CLARKSON, P. A. & KRUSKAL, M. D., New Similarity Reductions ofthe Boussinesq
Equation, J. Math. Phys., 30, 2201-2213 (1989).
11. ARRIGO, D. J., BROADBRIDGE, P., & HILL, J. M., Nonclassical Symmetry Solutions
and the Methods of Bluman-Cole and Clarkson-Kruskal, /. Math. Phys, 34 (10),
4692-4703 (1993).
12 LEVI, D., & WTNTERNITZ, P., Nonclassical Symmetry Reduction: Example of the
Boussinesq Equation, /. Phys. A: Math. Gen., 22, 2915-2924 (1989).

190
13. NUCCI, M. C. & CLARKSON, P. A., The Nonclassical Method is more general than the
Direct Method for Symmetry Reductions: An Example of the Fitzhugh-Nagumo
Equation, Phys. Lett., 164A, 49-56 (1992).
14. CLARKSON, P. A & WINTERNITZ, P., Nonclassical Symmetry Reductions for the
Kadomtsev-Petviashvili Equation, Physica D, 49, 257-272 (1991).
15. PUCCI, E., Similarity Reductions of Partial Differential Equation, / Phys. A: Math.
Gen., 25, 2631-2640 (1992).
16. FOKAS, A. S. & LIU, Q. M., Generalized Conditional Symmetries and Exact Solutions
of Nonintegrable Equations, Theor. Math. Phys., 99, 263-277 (1994).
17. BERTSCH, M. & DAL PASSO, R., Hyperbolic Phenomena in a Strongly Degenerate
Parabolic Equation, Arch. Rational. Mech. Anal, 117, 349-387 (1992).
18. BARENBLATT, G. I., BERTSCH, M., DAL PASSO, R. & UGHI, M., A Degenerate
Pseudoparabolic Regularization of a Nonlinear Forward-Backward Heat Equation
arising in the Theory of Heat and Mass Exchange in Stably Stratified Turbulent
Shear Flow, SIAM J. Math. Anal., 24, 1414-1439 (1993).
19. FOKAS, A. S. & YORTSOS, Y. C, On the Exactly Solvable Equation St = [(fiS +
7)~2Sx]x + a(fiS + ~f)~2Sx Occurring in Two-Phase Flow in Porous Media, SIAM
J. Appl. Math., 42, 318-332 (1982).
20. BROADBRIDGE, P. & ROGERS, C, On a Nonlinear Reaction-Diffusion Boundary
Value Problem: Application of a Lie-Backlund Symmetry, /. Austral. Math. Soc B,
34,318-332(1993).
21. CLARKSON, P., FOKAS, A. S. & ABLOWITZ, M. J., Hodograph Transformations of
Linearizable Partial Differential Equations, SIAM J. Appl. Math., 49, 1188-1209
(1989).
22. FOURSOV, M. V. & VOROB'EV, E. M., Solutions of the Nonlinear Wave Equation
utt = (uux)x Invariant under Conditional Symmetries, /. Phys. A: Math. Gen.,
29, 6363-6373 (1996).

191
23. BLUMAN, G. W. & KUMEI, S., Symmetries and Differential Equations, Springer-Verlag,
New York (1989).
24. PHILIP, J. R., n -Diffusion, Aust. J. Phys., 14, 1-13 (1961).
25. AKHATOV, I. Sh., GAZIZOV, R. K. & IBRAGIMOV, N. H, Quasilinear Symmetries of
Equations of Nonlinear Heat-Conduction Type, Dokl. Akad. Nauk. S.S.S.R., 295,
75-78 (1987).
26. CHAR, B. W, GEDDES, K. O., GONNET, G. H., LEONG, B. L., MONAGAN, M. B.,
WATT, S. M., MAPLE V: Language Reference Manual, Springer-Verlag, New York
(1991).
27. GURTFN, M. E. & MACCAMY, R. C, On the Diffusion of Biological Populations, Math.
Bioscl, 33, 35-49(1977).
28. SPIEGEL, M. R., Applied Differential Equations, Prentice-Hall, Englewood Cliffs N. J.
(1981).
29. HABERMAN, R., Elementary Applied Partial Differential Equations with Fourier Series
and Boundary Value Problems, Prentice-Hall, Englewood Cliffs N. J. (1987).
30. ROSENAU, P., Free-Energy Functionals at the High-Gradient Limit, Phys. Rev. A, 41,
2227-2230 (1990).
31. MULLINS, W W , Solid Surface Morphologies Governed by Capillarity, Metal Surfaces:
Structure, Energetics and Kinetics (eds., W. M. Robertson and N. A. Gjostein), A S M
Metals Park, Ohio (1963).
32. MULLINS, W W , Theory of Thermal Grooving, /. Appl. Phys., 28, 333-339 (1957).
33. ROSENAU, P., Tempered Diffusion: A Transport Process with Propagating Fronts and
Inertial Delay, Phys. Rev. A, 46, R7371-7374 (1992).
34. ROSENAU, P., HAGAN, P. S., NORTHCUTT, R. L. & COHEN, D. S., Delayed Diffusion
due to Flux Limitation, Phys Lett. A., 142, 26-30 (1989).

192
35. PHILIP, J. R., General Method of Exact Solution ofthe Concentration-Dependent Diffu
sion Equation, Aust. J. Phys, 13, 1-12 (1960).
36. BROADBRIDGE, P., Exact Solvability of the Mullins Nonlinear Diffusion Model of
Groove Development, J. Math. Phys., 30, 1648-1651 (1989).
37. CARSLAW, H. S & JAEGER, J. C, Conduction of Heat in Solids, 2nd Ed., Clarendon
Press, Oxford (1986).
38. FRANK-KAMENETSKII, D. A., Diffusion and Heat Transfer in Chemical Kinetics,
Plenum Press, N. Y. (1967).
39. ARRIGO, D. J., GOARD, J. M. & BROADBRIDGE, P., Nonclassical Solutions are Non-
Existent for the Heat Equation and Rare for Nonlinear Diffusion, / Math. Anal.
Applic, 202, 259-279 (1996).
40. ARRIGO, D. J., HILL, J. M. & BROADBRIDGE, P., General Nonclassical Symmetry
Reductions ofthe Linear Diffusion Equation with a Nonlinear Source, IMA Journal
of Applied Math., 52, 1-24 (1994).
41. LUDFORD, G. S., Combustion and Chemical Reactions, Amer. Math. Soc. (1986).
42. FTTZHUGH, R., Impulses and Physiological States in Models of Nerve Membrane,
Biophysical]., 1, 445-466 (1961).
43. BRITTON, N. F, Reaction-Diffusion Equations and their Applications to Biology, Aca
demic Press (1986).
44. HILL, J. M. & SMYTH, N. F, On the Mathematical Analysis of Hot-spots arising from
Microwave Heating, Math. Eng. in Industry, 2, 267-278 (1990).
45. FRIEDMAN, A., Blow-up Solutions of Nonlinear Parabolic Equations, In Nonlinear
Diffusion Equations and their Equilibrium States I, edited by W-M. Ni, L. A. Peletier
and J. Serrin, Springer-Verlag (1988).
46 BEBERNES, J. & EBERLY, D., Mathematical Problems from Combustion Theory,
Springer-Verlag (1989).

193
47. WEBER, R. O. & BARRY, S. I., Finite Time Blow-up in Reaction-Diffusion Equations,
Math: & Comp. Modelling, 18, 163-168 (1993).
48. GALAKTIONOV, V A., DORODNITSYN, V. A., ELENIN, G. G., KURDYUMOV, S.
P. & SAMARSKII, A. A., A Quasilinear Heat Equation with a Source: Peaking,
Localization, Symmetry, Exact Solutions, Asymptotics, Structures, J. Sov. Math.,
41, 1222-1292 (1988).
49. SACHDEV, P. L., Nonlinear Diffusive Waves, Cambridge University Press (1987).
50. DORODNITSYN, V A., On Invariant Solutions of the Equation of Nonlinear Heat
Conduction with a Source, USSR Comput. Maths, and Math. Phys., 22, 115-122
(1982).
51. HILL, J. M., AVAGLIANO, A. J. & EDWARDS, M, P., Some Exact Results for Nonlinear
Diffusion with Absorption, IMA Journal of Appl. Math., 48, 283-304 (1992).
52. ARRIGO, D, J. & HILL, J. M., Nonclassical Symmetries for Nonlinear Diffusion and
Absorption, Studies in Appl. Math., 94, 21-39 (1995).
53. KIRCHHOFF, G., Vorlesungen uberdie Theorie der Warme, Barth (1894).
54. HILL, J. M., Differential Equations and Group Methods for Scientists and Engineers,
CRC Press (1992).
55. RIZ, P. M., Helmholtz Equation, pp 96-121, in Linear Equations of Mathematical Physics
edited by S. G. Mikhlin, Holt, Rhinehart & Winston (1967).
56. WAECHTER, R. T., Steady Rotation of a Body of Revolution in a Conducting Fluid,
Proc. camb. Phil. Soc, 65, 329-350 (1969).
57. WAECHTER, R. T. & PHILIP, J. R., Steady Two and Three Dimensional Flows in
Unsaturated Soil: the Scattering Analog, Water Resour. Res., 21,1875-1887(1985).
58. AMES, W. F, Nonlinear Partial Differential Equations in Engineering, Vol. 2, Academic
Press (1972).
59. KANURY, A. M., Introduction to Combustion Phenomena, Gordon & Breach (1982).

194
60. JONES, S. E. & AMES, W F, Nonlinear Superposition, /. Math. Anal. Appl, 17,
484-487 (1967).
61. INSELBERG, A., Noncommutative Superpositions for Nonlinear Operators, J. Math.
Anal. Appl, 29, 294-298 (1970).
62. LEVIN, S. A., Principles of Nonlinear Superposition, /. Math. Anal. Appl., 30, 197-205
(1970).
63. SPIJKER, M. N., Superposition in Linear and Nonlinear Ordinary Differential Equations,
J. Math. Anal. Appl., 30, 206-222 (1970).
64. ANDERSON, R. L. & IBRAGIMOV, N. H., Lie-Backlund Transformations in Ap
plications, SIAM Studies in Applied Mathematics, Soc. for Ind. Appl. Math.,
Philadelphia (1919).
65. LAMB, G. L., Analytical Descriptions of Ultrashort Optical Pulse Propagation in a
Resonant Medium, Rev. Mod. Phys., 43, 99-124 (1971).
66. PHILIP, J. R., Theory of Infiltration, Adv. Hydro., 5, 215-296 (1969).
67. BEAR, J., Dynamics of Fluids in Porous Media, Elsevier, N. Y (1972).
68. WARRICK, A. W , MULLEN, G. J. & NIELSON, D. R., Scaling Field-Measured Soil
Hydraulic Properties using a Similar Media Concept, Water Resour. Res., 13, 355-
362 (1977).
69. PHILIP, J. R., Sorption and Infiltration in Heterogeneous Media, Aust. J. Soil Res., 5,
1-10 (1967).
70. BROADBRIDGE, P., Integrable Flow Equations that Incorporate Spatial Heterogeneity,
Transp. in Porous Media, 2, 129-144 (1987).
71. BROADBRIDGE, P., Integrable Forms of the One-Dimensional Flow Equation for
Unsaturated Heterogeneous Porous Media, J. Math. Phys., 29, 622-627 (1988).
72. BARENBLATT, G. I. & SrVASHINSKY, G. I., Self-Similar Solutions of the Second
Kind in the Non-linear Filtration, J. Appl. Math. Meek, 33, 861-870 (1969).

195
73. MILLER, E. E. & MILLER , R. D., Physical Theory for Capillary Flow Phenomena, /.
Appl Phys., 27, 324-332 (1956).
74. WARRICK, A. W , Parameters in Infiltration Equations, pp 64-81 in 'Advances in
Infiltration', Amer. Soc. Agric. Engineers (1983).
75. BROOKS, R. H. & COREY, A. J., Hydraulic Properties of Porous Media, Hydroi Pap.
3, Colo State University, Fort Collins (1964).
76. TRITSCHER, P., READ, W. W , BROADBRIDGE, P. & STEWART, J. M., Steady
Infiltration in Sloping Porous Domains: the Onset of Saturation, Transp. in Porous
Media, in press.
77. MOORE, R. E., Water Conduction from Shallow Water Tables, Hilgardia, 12, 383-426
(1939).
78. PHILIP, J. R., Issues in Flow and Transport in Heterogeneous Porous Media, Transp. in
Porous Media, 1, 319-338 (1986).
79. OLVER, P. J., Direct Reduction and Differential Constraints, Proc. Roy. Soc. Lond. A,
444, 509-523 (1994).
80. MANSFIELD, E. L., DIFFGROB2: A Symbolic Algebra Package for Analysing Sys
tems of PDE using MAPLE, Users' Manual for Release 2, (University of Exeter,
Department of Mathematics) (1993).
81. BURDE, G. I., The Construction of Special Explicit Solutions of the Boundary-Layer
Equations. Steady Flows, Q. J. Mech. Appl. Math., 47 247-260 (1994).
82 KALNINS, E. G., & MILLER, JR, W , Separable Coordinates, Integrability and the
Niven Equations, /. Phys. A : Math. Gen., 25, 5663-5675 (1992).