16.412J/6.835 Intelligent Embedded Systems Prof. Brian Williams Rm 37-381 Rm NE43-838...
34
16.412J/6.835 Intelligent Embedded Systems Prof. Brian Williams Rm 37-381 Rm NE43-838 [email protected] MW 11-12:30, Rm 33-418
-
Upload
adele-short -
Category
Documents
-
view
221 -
download
3
Transcript of 16.412J/6.835 Intelligent Embedded Systems Prof. Brian Williams Rm 37-381 Rm NE43-838...

16.412J/6.835 Intelligent Embedded Systems
Prof. Brian Williams
Rm 37-381
Rm NE43-838
MW 11-12:30, Rm 33-418
OutlineOutline
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers

Course Objective 1Course Objective 1• To understand fundamental methods for creating the
major components of intelligent embedded systems.
Accomplished by: First ten lectures on basic methods ~ 5 problem sets during the first ten lectures to exercise
basic understanding of methods.
• To understand fundamental methods for creating the major components of intelligent embedded systems.
Accomplished by: First ten lectures on basic methods ~ 5 problem sets during the first ten lectures to exercise
basic understanding of methods.
Plan
ExecuteMonitor &Diagnosis
Basic Method LecturesBasic Method Lectures• Decision Theoretic Planning• Reinforcement Learning• Partial Order Planning• Conditional Planning and Plan Execution• Propositional Logic and Inference• Model-based Diagnosis• Temporal Planning and Execution• Bayesian Inference and Learning
More Advanced:• Graph-based and Model-based Planning• Combining Hidden Markov Models and Symbolic Reasoning
• Decision Theoretic Planning• Reinforcement Learning• Partial Order Planning• Conditional Planning and Plan Execution• Propositional Logic and Inference• Model-based Diagnosis• Temporal Planning and Execution• Bayesian Inference and Learning
More Advanced:• Graph-based and Model-based Planning• Combining Hidden Markov Models and Symbolic Reasoning
Course Objective 2Course Objective 2
• To dive into the recent literature, and collectively synthesize, clearly explain and evaluate the state of the art in intelligent embedded systems.
Accomplished by: Weekly thought questions (~ 2 page answers) Group lecture on advance topic
45 minute lecture Short tutorial article on method 1-3 methods Demo of example reasoning algorithm Groups of size ~3.
• To dive into the recent literature, and collectively synthesize, clearly explain and evaluate the state of the art in intelligent embedded systems.
Accomplished by: Weekly thought questions (~ 2 page answers) Group lecture on advance topic
45 minute lecture Short tutorial article on method 1-3 methods Demo of example reasoning algorithm Groups of size ~3.
Course Objective 3Course Objective 3
• To apply one or more reasoning elements to create a simple agent that is driven by Goals or Rewards
Accomplished by: Final project during last third of course
Implement and demonstrate one or more reasoning methods on a simple embedded system.
Short final presentation on project. Final project report.
• To apply one or more reasoning elements to create a simple agent that is driven by Goals or Rewards
Accomplished by: Final project during last third of course
Implement and demonstrate one or more reasoning methods on a simple embedded system.
Short final presentation on project. Final project report.
Plan
ExecuteMonitor &Diagnosis
OutlineOutline
• Course Objectives and Assignments• Types of Reasoning
(Slides compliments of Prof Malik, Berkeley)
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
• Course Objectives and Assignments• Types of Reasoning
(Slides compliments of Prof Malik, Berkeley)
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
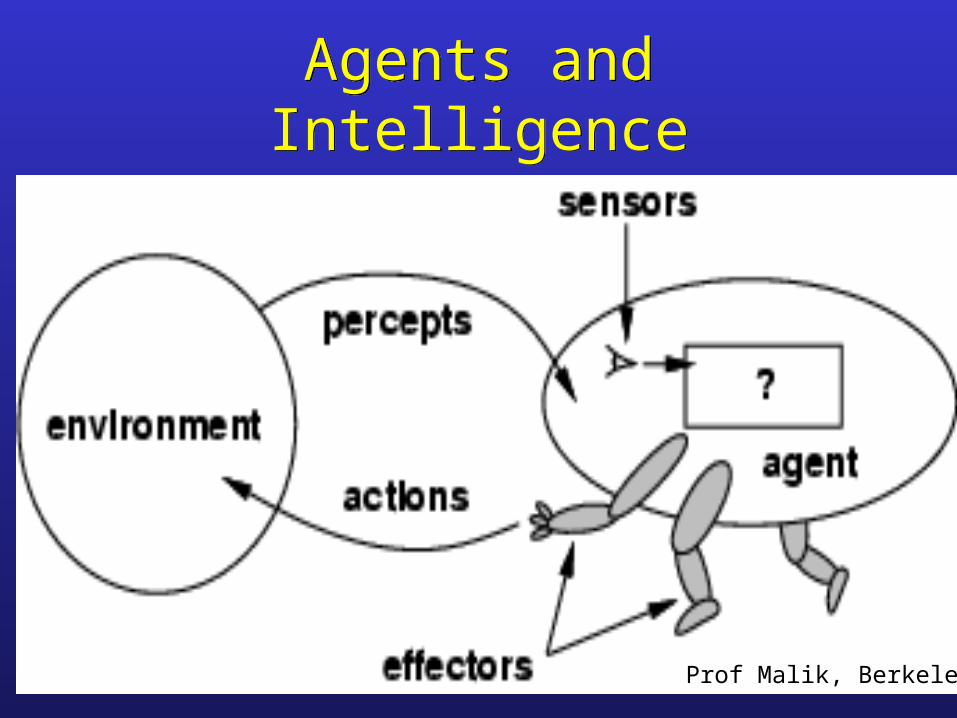
Agents and IntelligenceAgents and Intelligence
Prof Malik, Berkeley
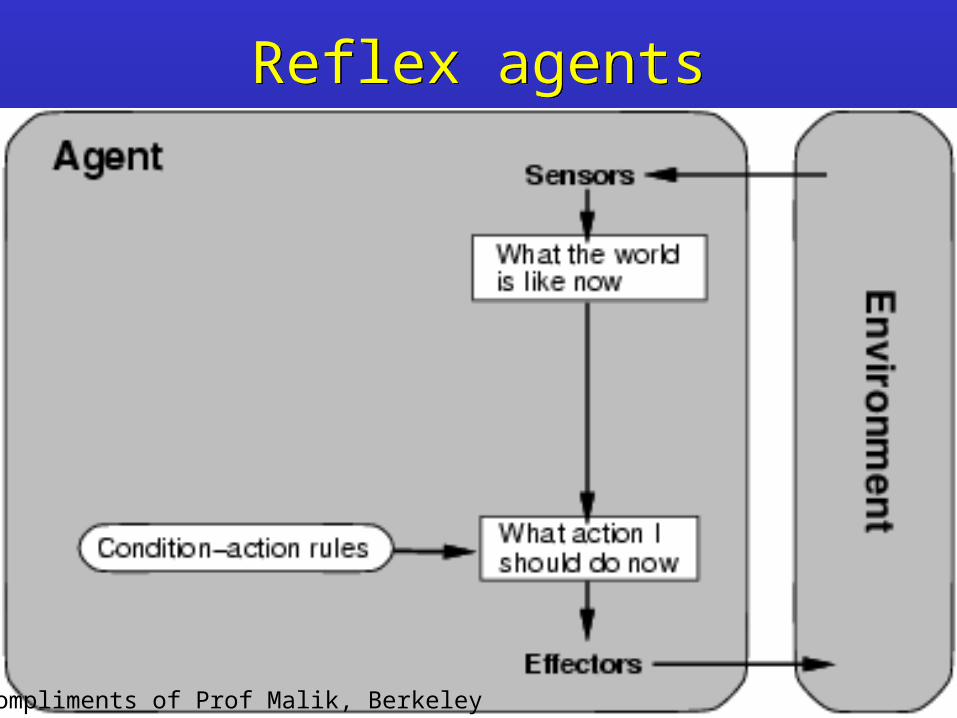
Reflex agentsReflex agents
Compliments of Prof Malik, Berkeley
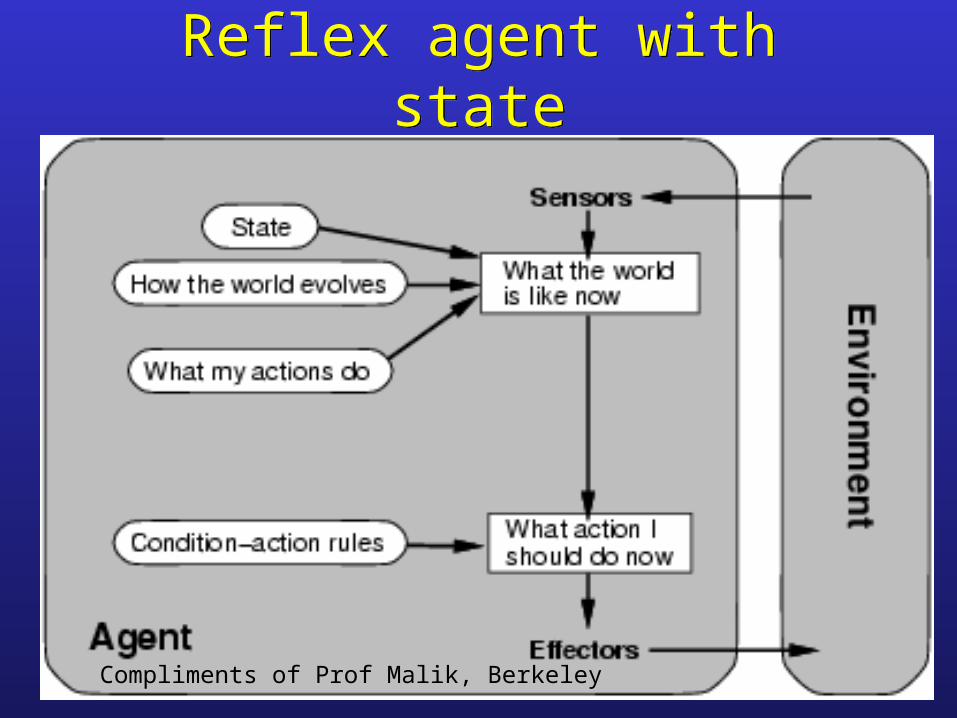
Reflex agent with stateReflex agent with state
Compliments of Prof Malik, Berkeley

Goal-oriented agentGoal-oriented agent
Compliments of Prof Malik, Berkeley
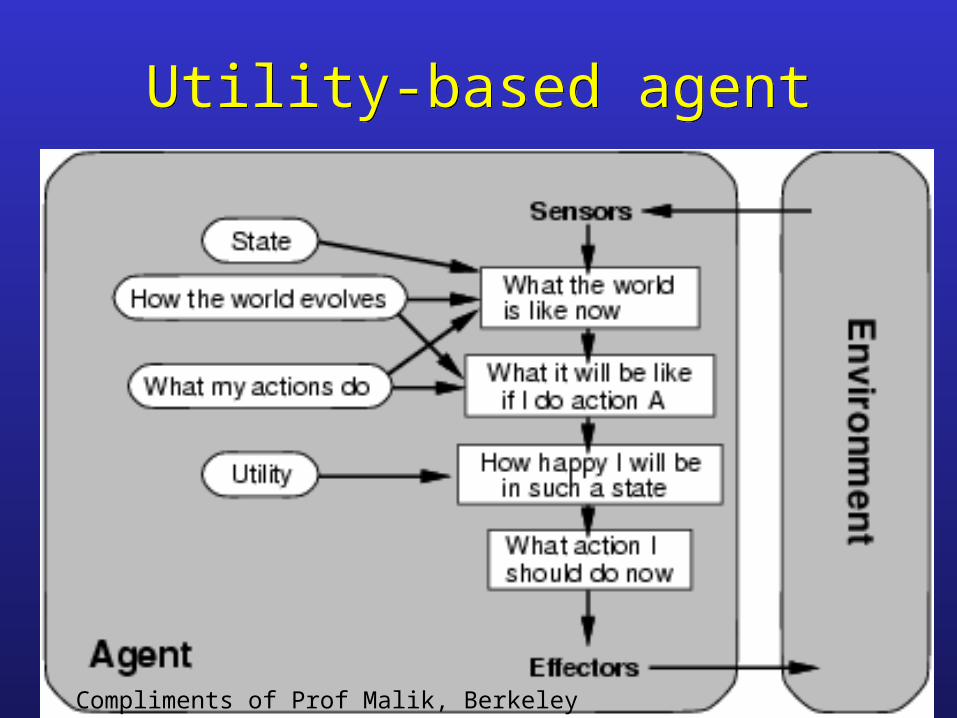
Utility-based agentUtility-based agent
Compliments of Prof Malik, Berkeley
OutlineOutline
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers

Immobile Robots: Intelligent Offices and Ubiquitous Computing
Ecological Life SupportFor Mars Exploration

courtesy NASA
The MIR Failure
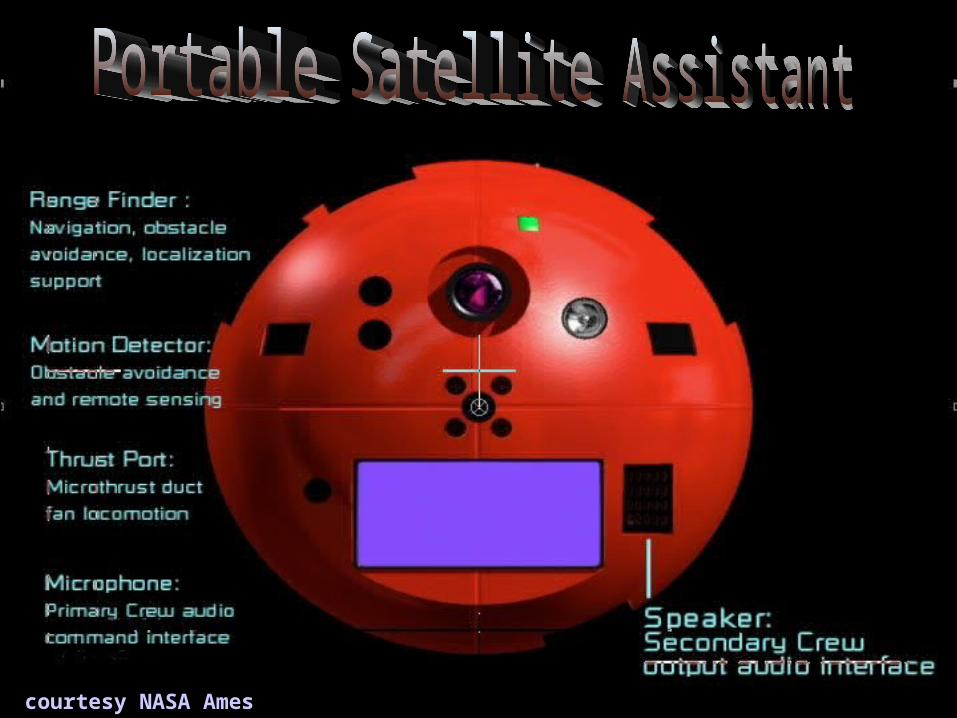
courtesy NASA Ames

MIT Spherescourtesy Prof. Dave Miller, MIT Space Systems Laboratory
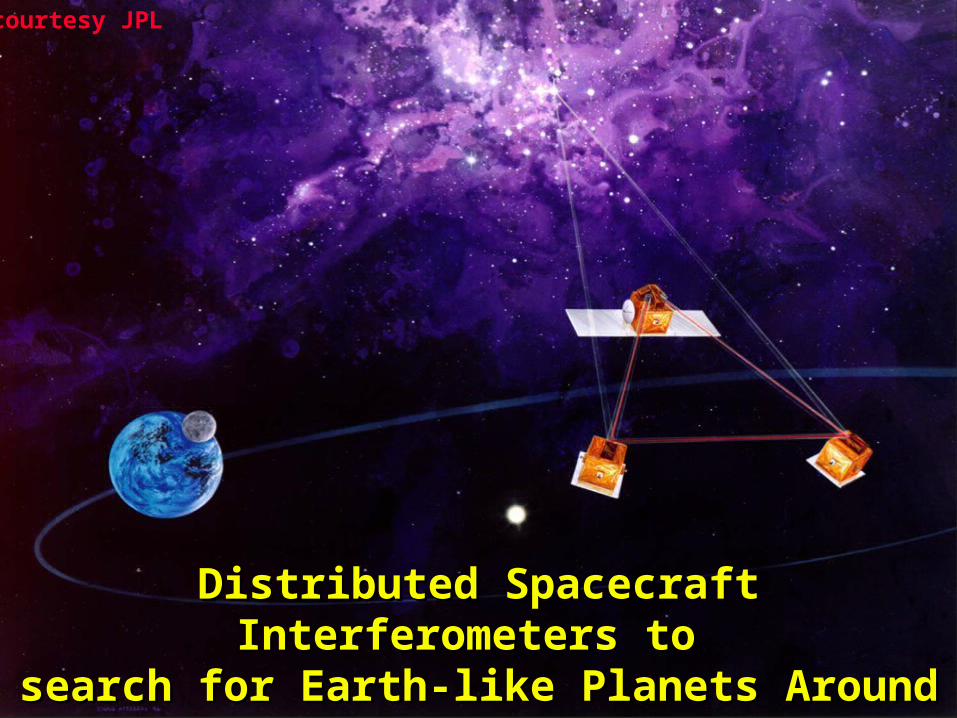
courtesy JPL
Distributed Spacecraft Interferometers to Distributed Spacecraft Interferometers to search for Earth-like Planets Around Other Starssearch for Earth-like Planets Around Other Stars

courtesy JPL
``Our vision in NASA is to open the Space Frontier . . . We must establish a virtual presence, in space, on planets, in aircraft and spacecraft.’’
- Daniel S. Goldin, NASA Administrator, May 29, 1996
A Goldin Era of Robotic Space Exploration
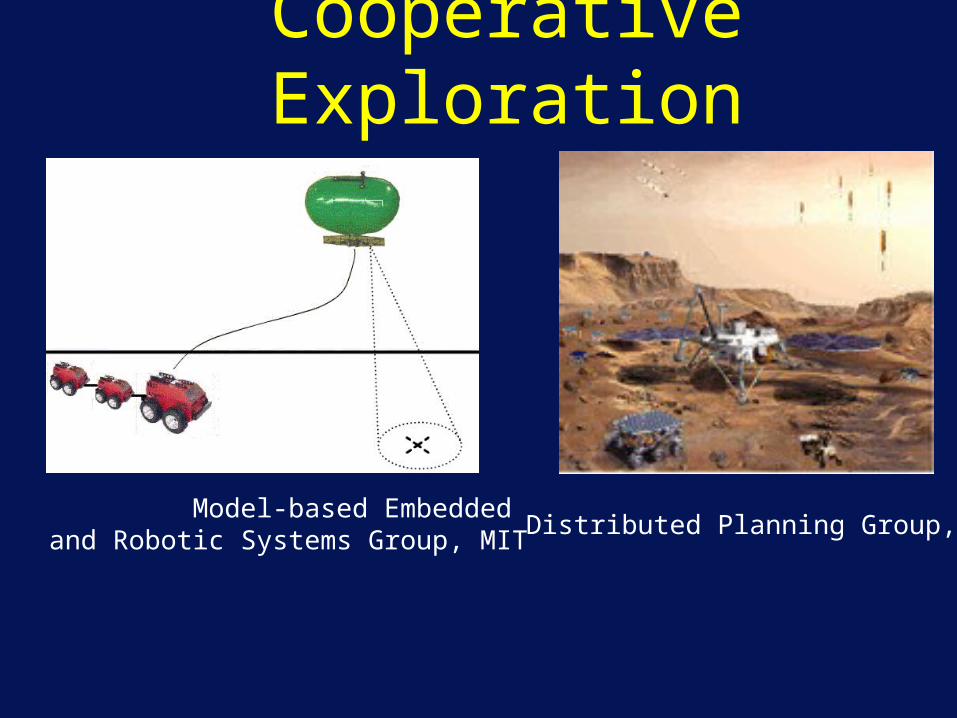
Cooperative Exploration
Distributed Planning Group, JPLModel-based Embedded
and Robotic Systems Group, MIT

MIT Model Based Embedded and Robotics Group
Autonomous Vehicles Testbed
MIT Model Based Embedded and Robotics Group
Autonomous Vehicles Testbed
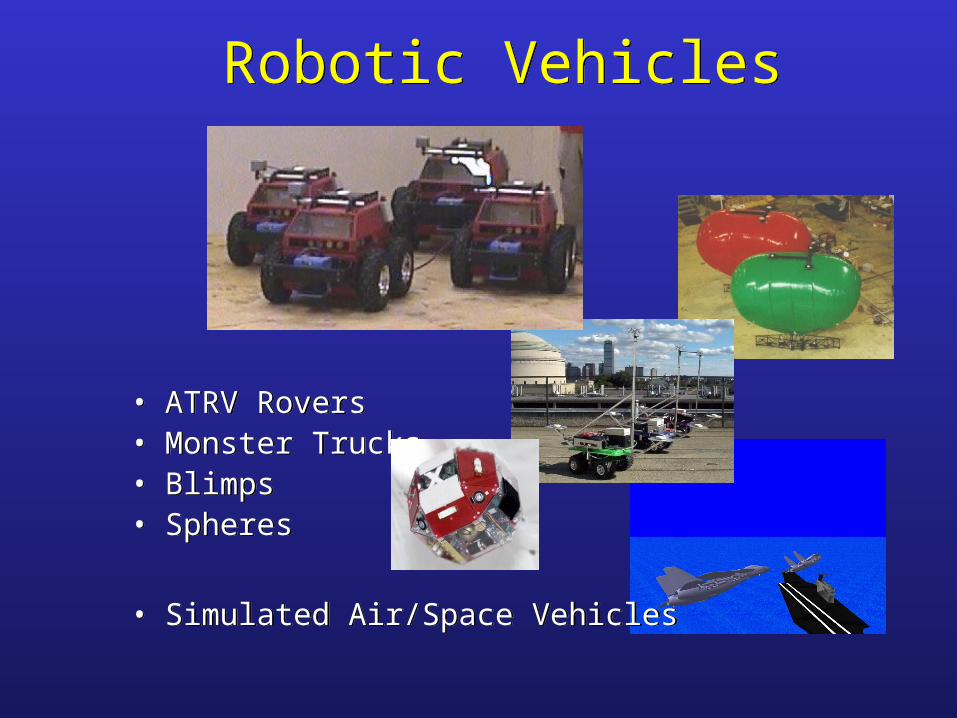
Robotic VehiclesRobotic Vehicles
• ATRV Rovers• Monster Trucks• Blimps• Spheres
• Simulated Air/Space Vehicles
• ATRV Rovers• Monster Trucks• Blimps• Spheres
• Simulated Air/Space Vehicles
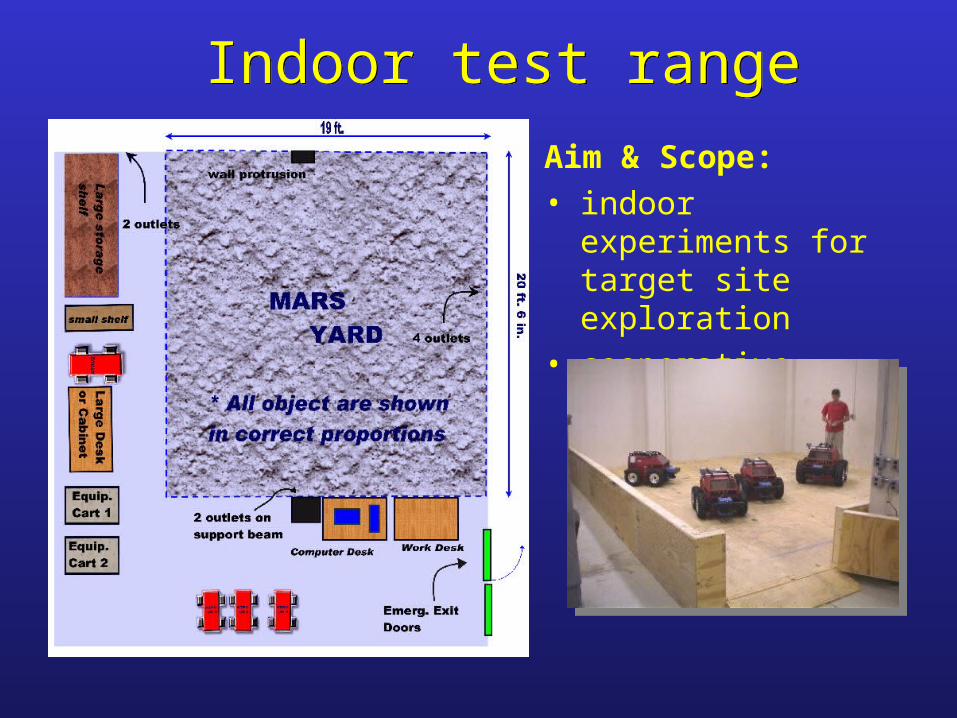
Indoor test rangeIndoor test range
Aim & Scope:• indoor experiments for
target site exploration• cooperative exploration
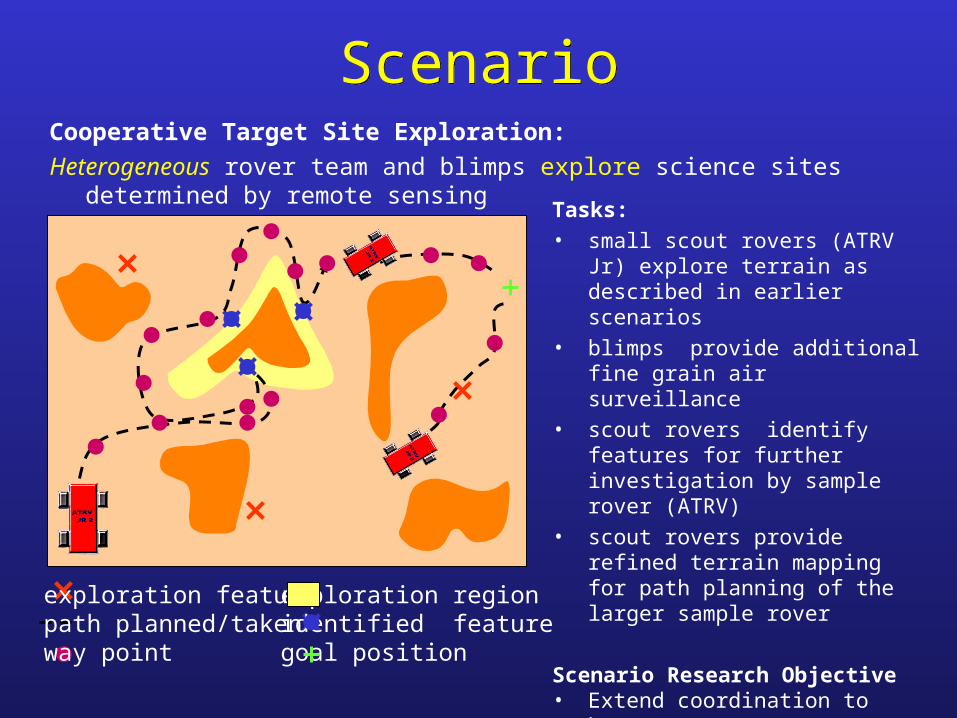
ScenarioScenarioCooperative Target Site Exploration:
Heterogeneous rover team and blimps explore science sites determined by remote sensing
exploration featurepath planned/takenway point
exploration regionidentified featuregoal position
Tasks:• small scout rovers (ATRV Jr)
explore terrain as described in earlier scenarios
• blimps provide additional fine grain air surveillance
• scout rovers identify features for further investigation by sample rover (ATRV)
• scout rovers provide refined terrain mapping for path planning of the larger sample rover
Scenario Research Objective• Extend coordination to
heterogeneous team …
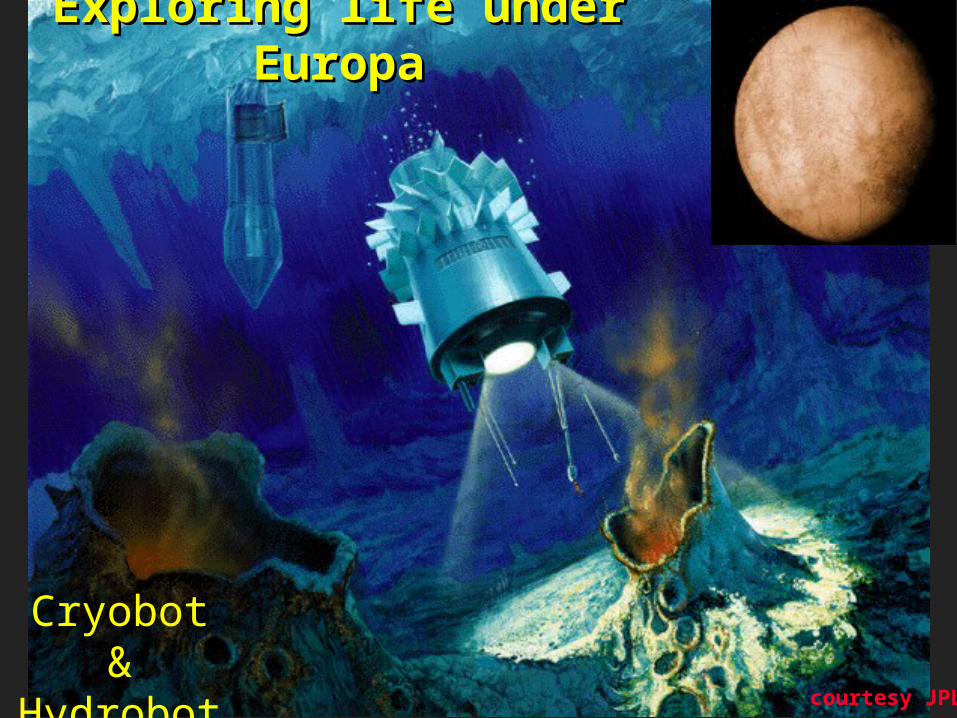
Cryobot & Hydrobot courtesy JPL
Exploring life under EuropaExploring life under Europa

OutlineOutline
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
• Course Objectives and Assignments
• Types of Reasoning
• Kinds of Intelligent Embedded Systems
• A Case Study: Space Explorers
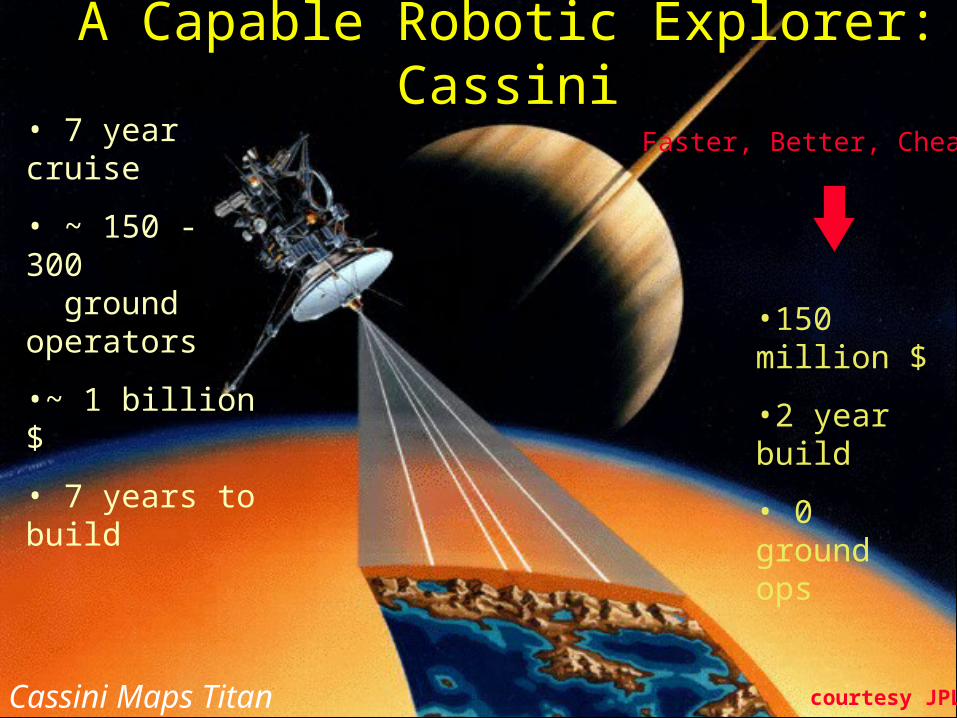
Cassini Maps Titan courtesy JPL
• 7 year cruise
• ~ 150 - 300 ground operators
•~ 1 billion $
• 7 years to build
A Capable Robotic Explorer: Cassini
•150 million $
•2 year build
• 0 ground ops
Faster, Better, Cheaper

courtesy JPL
``Our vision in NASA is to open the Space Frontier . . . We must establish a virtual presence, in space, on planets, in aircraft and spacecraft.’’
- Daniel S. Goldin, NASA Administrator, May 29, 1996

Four launches in 7 months
Mars Climate Orbiter: 12/11/98Mars Polar Lander: 1/3/99
Stardust: 2/7/99 QuickSCAT: 6/19/98courtesy of JPL
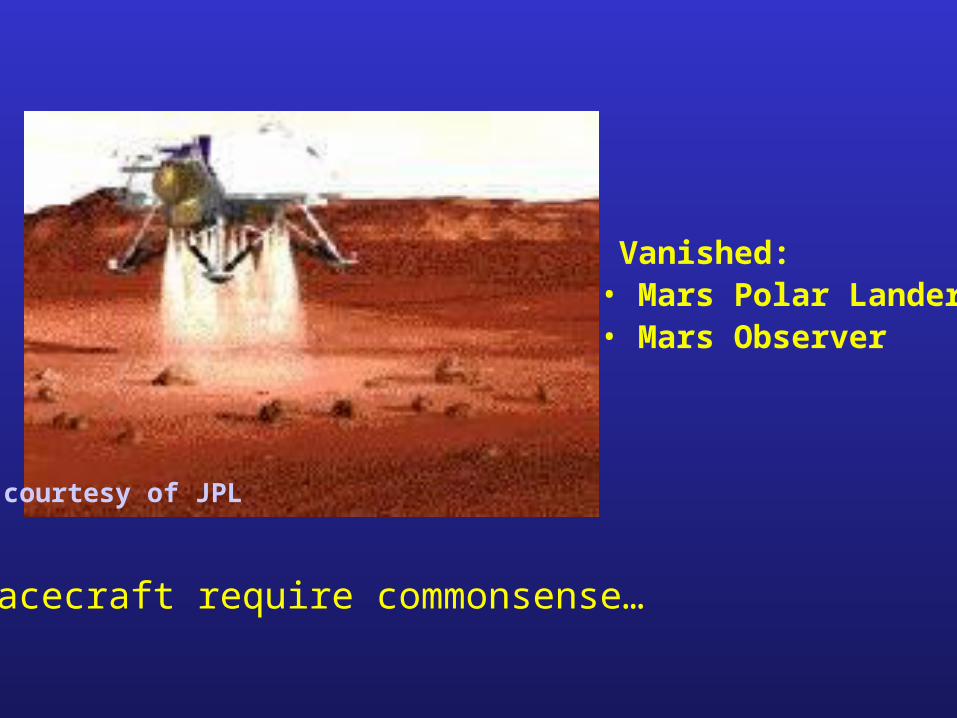
Vanished:• Mars Polar Lander• Mars Observer
courtesy of JPL
Spacecraft require commonsense…

Traditional spacecraft commanding
GS,SITURN,490UA,BOTH,96-355/03:42:00.000; CMD,7GYON, 490UA412A4A,BOTH, 96-355/03:47:00:000, ON; CMD,7MODE, 490UA412A4B,BOTH, 96-355/03:47:02:000, INT; CMD,6SVPM, 490UA412A6A,BOTH, 96-355/03:48:30:000, 2; CMD,7ALRT, 490UA412A4C,BOTH, 96-355/03:50:32:000, 6; CMD,7SAFE, 490UA412A4D,BOTH, 96-355/03:52:00:000, UNSTOW; CMD,6ASSAN,490UA412A6B,BOTH, 96-355/03:56:08:000, GV,153,IMM,231,
GV,153; CMD,7VECT, 490UA412A4E,BOTH, 96-355/03:56:10.000, 0,191.5,6.5,
0.0,0.0,0.0,96-350/00:00:00.000,MVR;
SEB,SCTEST,490UA412A23A,BOTH, 96-355/03:56:12.000, SYS1,NPERR; CMD,7TURN, 490UA412A4F,BOTH, 96-355/03:56:14.000, 1,MVR; MISC,NOTE, 490UA412A99A,, 96-355/04:00:00.000, ,START OF TURN;, CMD,7STAR, 490UA412A406A4A,BOTH 96-355/04:00:02.000, 7,1701,
278.813999,38.74; CMD,7STAR, 490UA412A406A4B,BOTH,96-355/04:00:04.000, 8,350,120.455999,
-39.8612; CMD,7STAR, 490UA412A406A4C,BOTH,96-355/04:00:06.000, 9,875,114.162,
5.341; CMD,7STAR, 490UA412A406A4D,BOTH,96-355/04:00:08.000, 10,159,27.239,
89.028999; CMD,7STAR, 490UA412A406A4E,BOTH,96-355/04:00:10.000, 11,0,0.0,0.0; CMD,7STAR, 490UA412A406A4F,BOTH,96-355/04:00:12.000, 21,0,0.0,0.0;
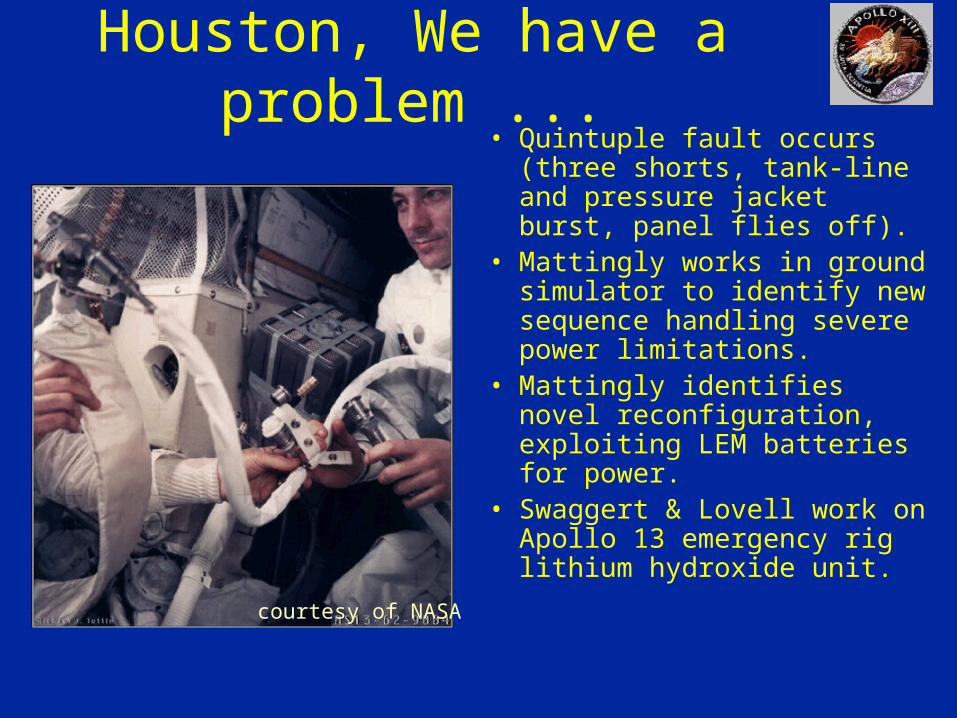
Houston, We have a problem ...
courtesy of NASA
• Quintuple fault occurs (three shorts, tank-line and pressure jacket burst, panel flies off).
• Mattingly works in ground simulator to identify new sequence handling severe power limitations.
• Mattingly identifies novel reconfiguration, exploiting LEM batteries for power.
• Swaggert & Lovell work on Apollo 13 emergency rig lithium hydroxide unit.

Self Repairing Explorers: Deep Space 1