1.4 Symmetrical rigid shaft in flexible anisotropic … Symmetrical rigid shaft in flexible...
30
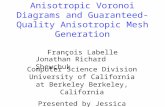
Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected]) 41 1.4 Symmetrical rigid shaft in flexible anisotropic bearings In systems where the bearings are far more flexible than the shaft it is the bearings, which will have the greatest influence on the motion of the rotor. Such rotors may be idealized as rigid rotor. Rotor mass center - z Imbalance force meω 2 x Rotor geometric center line B k x /2 2l e d k y /2 l Rotor geometric center A k x /2 k y /2 Figure 1.28(a) A rigid rotor mounted on a flexible bearing x y φ z z θ Figure 1.28(b) Positive convertions of angular displacements. It is assumed that the shaft has no flexibility, and the bearings are assumed to behave as linear springs having a stiffness k x in the horizontal direction and k y in the vertical direction. m is the rotor mass.The center of gravity is offset from geometrical center by distances e and d as shown in Figure 1.28(a). x and y are the linear displacements of the rotor (geometrical center) in the horizontal and vertical directions
Transcript of 1.4 Symmetrical rigid shaft in flexible anisotropic … Symmetrical rigid shaft in flexible...

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
41
1.4 Symmetrical rigid shaft in flexible anisotropic bearings
In systems where the bearings are far more flexible than the shaft it is the bearings, which will have the
greatest influence on the motion of the rotor. Such rotors may be idealized as rigid rotor.
Rotor mass center - z
Imbalance force meω2 x
Rotor geometric center line B
kx/2
2l e
d ky/2
l
Rotor geometric center
A
kx/2
ky/2
Figure 1.28(a) A rigid rotor mounted on a flexible bearing
x
y
φ z z θ
Figure 1.28(b) Positive convertions of angular displacements.
It is assumed that the shaft has no flexibility, and the bearings are assumed to behave as linear springs
having a stiffness kx in the horizontal direction and ky in the vertical direction. m is the rotor mass.The
center of gravity is offset from geometrical center by distances e and d as shown in Figure 1.28(a). x and y
are the linear displacements of the rotor (geometrical center) in the horizontal and vertical directions

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
42
respectively. φ and θ are the angular displacement of the rotor (geometrical center line) in the z-x and y-z
planes, respectively. Since for the present case there is no coupling between various displacements i.e. x,
y, φ and θ. Hence free body diagrams and equations of motion have been obtained by giving such
displacements independent of each other.
EOM in the x and y directions are
2 cos - xme t k x mxω ω = �� and
2 sin yme t k y myω ω − = �� (114, 115)
EOM in the φ and θ directions are
2 2cos x dme d t k l Iω ω φ φ− − = �� and 2 2sin y dme d t k l Iω ω θ θ− − = �� (116, 117)
y meω2sinωt
lθ /2 z
θ lθ /2 ky lθ/2 d y
ky lθ/2
Figure 1.29(a) Free body diagram of the rotor in y-z plane
y meω2
G
kxx e ωt
C
y kyy
x
x
Figure 1.29(b) Free body diagram of the rotor in x-y plane

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
43
x
meω2cosωt
d
φ 2xk lφ
y z
2xk lφ
l l
Figure 1.29(c) Free body diagram of the rotor in z-x plane
For sinusoidal vibrations, we can write
2 2 2 2, , andx x y yω ω φ ω φ θ ω θ= − = − = − = −���� �� (118)
Substituting equation (118) into equations (114) to (117), the unbalnce response can be expressed as
2 2
2 2cos cos ; sin sin
x y
me mex t X t y t Y t
k m k m
ω ωω ω ω ω
ω ω= = = =
− −
2 2
2 2 2 2cos cos and sin sin
x d y d
me d me dt t t t
k l I k l I
ω ωφ ω ω θ ω ω
ω ω= = Φ = = Θ
− − (119)
where X and Y are linear displacement amplitudes and Φ and Θ are angular displacement amplitudes.
From the denominators of amplitudes it can be seen that the system has four critical speeds, two for
lateral vibration in the horizontal and vertical directions and two for angular vibration in the x-z and y-z
planes. Critical speeds can be written as
1 2 3 4
22
; ; ; and y yx x
cr cr cr cr
d d
k k lk k l
m m I Iω ω ω ω= = = = (120)
From equation (119) on squaring x and y and adding, it gives
2 2
2 21
x y
X Y+ = (121)
It is an equation of ellipse. Similarly from equation (119), we get

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
44
2 2
2 21
φ θ
θ+ =
Φ (122)
If kx < ky (i.e. 1 2cr crω ω< ) and
1crω ω< i.e when rotor is having low speed and operating below first
critical speed. From equation (119) both X and Y are positive. So rotor whirls in the same direction as the
rotation of the shaft. For 1 2cr crω ω ω< < i.e. the speed of rotation is in between the horizontal and vertical
direction critical speeds, then from equation (119) displacement X becomes negative indicating that the
rotor horizontal displacement is always in the opposite direction to that it adopted at low speeds. It
follows from this that the rotor must whirl in the opposite direction to that in which the shaft is rotating
and it called backward whirl. At higher shaft speeds 2crω ω> both X and Y are negative and with both
displacements in opposite direction to that shown in Figure 1.16 reveals that the rotor whirl once more in
the same direction as its rotation. ( phase may be different). It can have forward or backward whirl. The
orbital trajectory of the rotor must therefore take the form as shown in Figure 1.30.
Equation (122), relating to the angular motion of the rotor, is also the equation of an ellipse.This means
that there is an elliptical orbital trajectory of the rotor ends due to angular motion of the rotor. This rotor
motion is caused by the imbalance couple meω2d acting on the rotor, and it is superimposed on the lateral
motion described previously. A reversal of the direction of the orbit associated with this motion also
occurs, between two critical speeds associated with angular motion of the rotor (i.e. 3 4cr crω ω ω< < ).

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
45
(i) Synchronous whirl,
1crω ω<
(ii) Anti-synchronous whirl,
1 2cr crω ω ω< <
(iii) Synchronous whirl,
2crω ω>
(a) Plot of x versus ωt
fplot('cos(x)', [0 2*pi], 'k');
(d) Plot of x versus ωt
fplot('-cos(x)', [0 2*pi], 'k');
(g) Plot of x versus ωt
fplot('-cos(x)', [0 2*pi], 'k');
(b) Plot of y versus ωt
fplot('sin(x)', [0 2*pi], 'k')
(e) Plot of y versus ωt
fplot('sin(x)', [0 2*pi], 'k')
(h) Plot of y versus ωt
fplot('-sin(x)', [0 2*pi], 'k');
(c) Plot of x-y
(the shaft center orbit) (f) Plot of x-y
(the shaft center orbit)
(i) Plot of x-y
(the shaft center orbit)
Figure 1.30 Whirl directions with respect to the shaft spin frequency
ω ω ω

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
46
(a) Synchronous translation whirl (b) Synchronous conical whirl
(c) Anti-synchronous translation whirl (d) Anti-synchronous conical whirl
Figure 1.31 Mode Shapes for a rigid rotor mounted on flexible bearings
The amplitude of the force transmitted to the bearings is now different in horizontal and vertical
directions, as well as at each end of the rotor.The force transmitted is that which causes the bearings to
deform and is given by the product of spring stiffness and rotor deflection at the bearing. The bearing
force amplitudes are
( ) ( ); and 2 2
yxx y
kkF x l F y lφ θ= ± = ± (125)
in horizontal and vertical direction respectively. The + sign refers to the angular motion of the rotor
causes the rotor end to deflect in the same direction to the lateral deflections of the rotor and the - sign
refers to the angular motion of the rotor causes the rotor end to deflection in the opposite direction to the
lateral deflections of the rotor. These bearing forces must take on maximum values when the system is
operated at the critical speeds, where x, y, φ and θ are maximum.
Example 1.8. A long rigid symmetric rotor is supported at ends by two identical bearings. Let the shaft
has the diameter of 0.2 m, the length of shaft is 1 m and the mass density of the shaft material equal to
7800 kg/m3. The bearing dynamic characteristics are as follows: kxx = kyy = 1 kN/mm with rest of the
ω
ω ω
ω
ω
ω ω
ω

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
47
stiffness and damping terms equal to zero. By considering the gyroscopic effect negligible also, obtain the
natural frequencies of the system.
Since cross-coupled stiffness coefficients is x and y directions are zero and no gyroscopic effect is
considered, hence single plane motion can be considered one at a time. For the present analysis there is no
coupling is considered between the linear and rotational displacements and since stiffnesses in x and y
direction is same hence natural frequencies in these directions can be written as
1,2
62 2 1 1090.34 rad/s
245.04
k
mω × ×
= ± = ± = ±
Similarly natural frequencies corresponding to the titling motion can be written as
2 2 2
3,4
1 10 1154.184 rad/s
2 2 21.0326d
kl
Iω
× ×= ± = ± = ±
×
Example 1.9. (a) Find the bending critical speed of the system shown in Figure 1.32 in which the disc is
made of solid steel with a diameter of 127 mm, and a thickness of 25.4 mm. The mass density of the steel
is 7800 kg/m3. The disc D is placed in the middle of a shaft and the total length of the steel shaft between
bearings is 508 mm, and its diameter is 12.7 mm. The bearings have equal flexibility in all directions, the
constant for either one of them being k = 175 N/m. (b) Solve the same problem as part (a) except that the
bearings have different vertical and horizontal flexibilities: khoz = 175 N/m and khoz = 350 N/m for each of
the bearings. Neglect the cross-coupled stiffness coefficients and the mass of the shaft and treat it as rigid.
Figure 1.32 A rigid rotor on flexible support
Solution (2) (a) EOM can be written as
20 and 0x d xmx k x I k lφ+ = + =����
Since 2xk k= , we have
Z
Y
X
D B2 B1

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
48
22 0 and 0dmx kx I klφ φ+ = + =����
The mass and mass moment of inertia of the disc are given as
2π7800 (0.127) (0.0254) 2.51 kg
4m = × × = ; ( )21 12 2
2 22.51 0.127 / 2 0.00504 kg-mdI mr= = × × =
The natural frequencies are given as
1 2
22 211.836 rad/s and 133.87 rad/sn n
k kl
m mω ω= = = =
2(b) With different stiffness properties in horizontal & vertical directions, the natural frequencies are
given as
1 2
3 4
2 2
2 216.73 rad/s; 11.84 rad/s
2 2189.32 rad/s; and 133.87 rad/s
ver hozn n
ver hozn n
d d
k k
m m
k l k l
I I
ω ω
ω ω
= = = =
= = = =
Answer
Example 1.10: Find critical speeds of a rotor system as shown in Figure 1.33.
m =10 kg, Id = 0.1 kg-m2
2 m kx
A
ky
B
Rigid rotor
kx
A
ky
A
Figure 1.33 A rigid rotor on flexible bearings
Take the bearing stiffness properties as: 1.1 kN/mmAx
k = ; 1.8 kN/mmAy
k = ; 3.1 kN/mmB
kx = and
3.8 kN/mmBy
k = .

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
49
Solution: Equations of motion in x & y directions are
2 2cos and sinA B A Bx x y yme t k x k x mx me t k y k y myω ω− − = − − =�� ��
Equations of motion in θ and φ directions are
2 2 2 2 2 2sin and sinA B A By y d y y dme d t k l k l I me d t k l k l Iω θ θ θ ω φ φ θ− − = − − =�� ��
The steady state force vibration responses can be obtain as
2
2
2cos ; sin
2A B A Bx x y y
me mex t y t
k k m k k m
ω ωω ω
ω ω= =
+ − + −
( ) ( )2 2
2 2 2 2
ω ωcosω ; sinω
ω ωA B A Bx x d y y d
me d me dt t
k k l I k k l Iφ θ
−
= =+ + −
On equating determinates of responses, critical speeds can be obtained as
( )
( )
6
1
6
2
26 2
3
26 2
4
(1.1 3.1) 10648 rad/s;
10
(1.8 3.8) 10748.3 rad/s
10
(1.1 3.1) 10 16480.7 rad/s;
0.1
(1.8 3.8) 10 1748.3 rad/s
0.1
A B
A B
A B
A B
x x
y y
x x
d
y y
d
pm
pm
lp
I
lp
I
k k
k k
k k
k k
+ ×= = =
+ ×= = =
+ × ×= = =
+ × ×= = =
+
+
+
+
Answer
Exercise 1.3. Obtain the bending critical speeds and mode shapes of a rotor, consist of massless rigid
shaft (1 m of span with 0.7m from the disc to the left bearing) and a rigid disc (5 kg), supported by
flexible bearings as shown in Figure E1.3 Consider the motion in vertical plane only. Is there is any
difference in critical speeds when the disc is placed at the center of the rotor? If NO then justify the same
and if YES then obtain the same. Take Id = 0.1 kg-m2.

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
50
Disc
massless rigid shaft
20 kN/m
bearings
Figure E1.3 Exercise 1.4: Consider a long rigid rotor, R, supported on two identical bearings, B1 and B2, as shown in
Figure 1. Take the direct damping and the cross-coupled stiffness and damping coefficients of both
bearings negligible. The direct stiffness coefficients of both bearings in the horizontal and vertical
directions are equal i.e. K. The mass of the rotor is m, the span of the rotor is l, the dimetral and polar
mass moment of inertia are, respectively, Id and Ip and ω is the shaft rotational frequency. Derive
equations of motion and obtain the natural frequencies of whirl. Give a brief discussion of results.
Z
Y
X
R B2 B1
Figure E1.4

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
51
1.5 Symmetrical rigid shaft in flexible anisotropic bearings with damping and cross coupling
For the case of oil-film lubricated bearings the bearing have associated damping properties as well as
spring stiffness properties. Furthermore in case of hydrodynamic bearings the shaft motion in the
horizontal direction is coupled with that in the vertical direction. However, coupling between the
translational and tilting motion has not been considered since the rotor is symmetric. In most applications
the properties of such bearings are described in terms of the eight linearised bearing stiffness and damping
coefficients. Symmetrical rigid shaft in flexible anisotropic bearings will be identical to Figure 1.28 with
cross-coupled terms.
The EOM for rotor are given by
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
2 2 2 2
2 2 2 2
-
-
x xx xy xx xy
y yx yy yx yy
xz xx xy xx xy d
yz yx yy yx yy d
F k x k y c x c y mx
F k x k y c x c y my
M k l k l c l c l I
M k l k l c l c l I
φ θ φ θ φ
φ θ φ θ θ
− − − − =
− − − − =
− − − =
− − − =
� � ��
� � ��
� � ��
� � ��
(126)
in horizontal and vertical directions and about the y and x axes passing through the geometrical center,
respectively. kxx, kxy, etc are eight linearised bearing stiffness and damping coefficients of both bearings
(twice those for one bearing, assuming a symmetrical system). It is assumed that there is no coupling
between the linear (i.e. x and y) and angular displacements (i.e. φ and θ) due to symmetry of the rotor.
The imbalance force meω2 is located same distance from the rotor geometrical center. Out of balance
forces in the horizontal and vertical directions may then be written as
( ) ( )2 2 j jcos Re Ret t
x xF me t me e F eω ωω ω ω= = = with 2 xF meω=
( ) ( )2 2 j jsin Re j Ret t
y yF me t me e F eω ωω ω ω= = − = with 2 jyF meω= − (127)
where xF and yF are complex forces (which contains amplitude and phase informations) in the x and y
directions. These forces are acting at the center of gravity. The moments about the rotor geometrical
center caused by these forces are
( ) ( )2 2 j jcos Re Ret t
xz xzM me d t me de M eω ωω ω ω= = = with 2 xzM me dω=

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
52
( ) ( )2 2 j jsin Re j Ret t
yz yzM me d t me de M eω ωω ω ω= = − = with 2 -jyzM me dω= (128)
where xzM and yzM are complex moments (which contains amplitude and phase informations) about the
x and y directions. The response can be assumed as
j j j j; ; ; =t t t tx Xe y Ye e eω ω ω ωφ θ= = = Φ Θ (129)
where X, Y, Φ and Θ are complex displacements. Equations of motion (126) can be written as
[ ]{ } [ ]{ } [ ]{ } { }( )M x C x K x f t+ + =�� � (130)
with
[ ] [ ] [ ]
{ } { }
2 2 2 2
2 2 2 2
0 0 0 00 0 0
0 0 0 00 0 0; C ; ;
0 0 0 00 0 0
0 0 0 00 0 0
( ) ; ( )
xx xy xx xy
yx yy yx yy
xx xy xx xyd
yx yy yx yyd
x
y
xz
c c k km
c c k kmM K
l c l c l k l kI
l c l c l k l kI
Fx
Fyx t f t
Mφθ
= = =
= = yzM
The response takes the following form
{ } { } { } { } { } { }j j 2 j; so that j and t t tx X e x X e x X eω ω ωω ω= = = −� �� (131)
On substituting equations (127), (128) and (131) into equations of motion (130), we get
[ ] [ ] [ ]( ){ } { }2 jM C K X Fω ω− + + = (132)
with
{ } { };
x
y
xz
yz
FX
FYX F
M
M
= =
Φ Θ
which can be written as

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
53
[ ]{ } { }D X F= with [ ] [ ] [ ] [ ]( )2 jD K M Cω ω= − + (133)
The response can be obtained as
{X} = [D]-1 {F} (134)
The displacement amplitude of the rotor will be given by
2 2 2 2 2 2 2 2, , ,r i r i r i r iX X X Y Y Y= + = + Φ = Φ +Φ Θ = Θ +Θ (135)
and corresponding phase lag will be given by
-1 -1 -1 -1tan , tan , tan , tani i i i
r r r r
X Y
X Yα β γ δ
Φ Θ= = = = Φ Θ
(136)
The resulting shaft whirl orbit can be plotted using equation (129) and (134) i.e.
j j and t tx Xe y Yeω ω= =
and in general will be found to take the form as shown in Figure 1.34.
Instantaneous force on the rotor
y
φ - Phase lag angle
x
Instantaneous rotor
displacement
Orbital trajectory
Figure 1.34 Rotor whirl orbit
The form of the orbit is still elliptical but the major and minor axes no longer line up with the bearing x
and y axes. The force vectors of equation (127) are also shown on the diagram and can be seen to precede
the displacement vectors.

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
54
Since in the present case the coupling is considered between the vertical and horizontal planes and no
coupling is considered between the translational and tilting motions, it can be observed that first two set
of equations from equation (126) (without damped) is similar in form as the case when we considered no
coupling between the vertical and horizontal planes and coupling is considered between the translational
and tilting motion (i.e. flexible shaft with a disc away from mid-span). Mathematically we can write:
11 12, , xx xyk k k k= = � and rest of the analysis and interpretations are similar to as discussed previously.
The similar analyses can be obtained by considering last two set of equations (126).
Example 1.11. Obtain the bending critical speeds and mode shapes of a rigid rotor, consist of massless
rigid shaft of 2 m of span, 5 kg mass and diametral mass moment of inertia of 0.1 kg-m2, supported by
flexible bearings as shown in Figure 128. The bearing properties are: kxx = 2.0×104 N/m, kyy = 8.8×10
4
N/m, kxy = 1.0×103 N/m, kyx = 1.5×10
3 N/m, cxx = 1.0 N-s/m, cyy = 1.0 N-s/m, cxy = 1.0×10
-1 N-s/m and kxx
= 1.0×10-1 N-s/m. Obtain the unbalance response (amplitude and phase) at bearing locations when the
radial eccentricity of 0.1 mm and axial eccentricity of 1 mm is present in the rotor and locate critical
speeds.
Solution: Figure 1.35 shows the unbalance responses both for the linear and angular displacements. Both
the amplitude and phase has been plotted. It can be observed that in the plot of linear and angular
displacement two peaks appears and they correspond to the critical speeds of the system. Since the linear
and angular displacements are uncoupled for the present case and hence corresponding critical speeds
appears in respective plots. There are four critical speeds: 70 rad/s, 120 rad/s, 480 rad/s and 920 rad/s ?.

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
55
Figure 1.35 Amplitude and phase variation with respect to spin speeds
%----------------------------------------------------------------------------
% Response plot for “Symmetrical rigid shaft in flexible anisotropic bearings “
% with damping and cross coupling. 22-1-2005
% Copywrites: Dr R Tiwari, Dept of Mechanical Engg., IIT Guwahati.
clear all;
%Rotor mass and diametral mass moment of inertia
rotor_mass=5; % kg
rotor_id=0.1; %kg-m2
radial_ecc=1.0e-4; %m
axial_ecc=1e-3; %m
%Bearing Stiffness and damping properties
kxx=2e4; kyy=8.8e4; kxy=1e3; kyx=1.5e3;%N/m
cxx=1; cyy=1; cxy=1e-1; cyx=1e-1;%N-s/m
l_span=1; %m Half the length of span.
ii=0;
for omega=1:0.5:1200; %rad/s
ii=ii+1;

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
56
Fx=rotor_mass*radial_ecc*omega^2; %N
Fy=-j*Fx; %N
Mxz=rotor_mass*radial_ecc*(omega^2)*axial_ecc; %Nm
Myz=-j*Mxz; %Nm
F=[Fx Fy Mxz Myz].';
M=[rotor_mass 0 0 0;
0 rotor_mass 0 0;
0 0 rotor_id 0;
0 0 0 rotor_id];
C=[ cxx cxy 0 0;
cyx cyy 0 0;
0 0 cxx*l_span^2 cxy*l_span^2;
0 0 cyx*l_span^2 cyy*l_span^2];
K=[ kxx kxy 0 0;
kyx kyy 0 0;
0 0 kxx*l_span^2 kxy*l_span^2;
0 0 kyx*l_span^2 kyy*l_span^2];
D=K-omega^2*M+j*omega*C;
X(:,ii)=D\F;
omega_vector(ii)=omega;
end
figure(1)
semilogy(omega_vector,abs(X(1,:)), 'k-');
xlabel('w ---->');
ylabel('y ---->');
figure(2)
semilogy(omega_vector,abs(X(3,:)), 'k-');
xlabel('w ---->');
ylabel('phi ---->');
figure(3)
plot(omega_vector,phase(X(1,:)), 'k-');
xlabel('w ---->');
ylabel('phase (y) ---->');
figure(4)
plot(omega_vector,phase(X(3,:)), 'k-');
xlabel('w ---->');
ylabel('phase (phi) ---->');
-----------------------------------------------------------
Exercise Problem 1.5. Find the critical speeds of the rotor bearing system shown in Figure E1.5. The
shaft is made of steel with Young’s modulus E = 2.1 (10)11 N/m
2 and uniform diameter d = 10 mm. Treat
the shaft as rigid and massless. The mass of the disc is: md = 1 kg with negligible diamentral mass

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
57
moment of inertia. Bearings B1 and B2 are identical bearings and having the following properties: kyy =
1.1 kN/m, kzz = 1.8 kN/m, kyz = 0.2 kN/m and kzy = 0.1 kN/m. The various shaft lengths are as follows:
B1D = 75 mm, and DB2 = 50 mm.
Figure E1.5
Exercise Problem 1.6. Obtain the critical speeds for transverse vibrations of rotor-bearing system as
shown in Figure E1.6. Consider shaft as rigid. The shaft is of 1 m of span and the diameter is 0.05 m with
the mass density of 7800 kg/m3. The shaft is supported at ends by flexible bearings. Consider the motion
in both the vertical and horizontal planes. Take the following bearing properties:
For bearing A: kxx = 20 MN/m, kyy = 15 MN/m, kxy = -1.5 MN/m, kyx = 25 MN/m,
cxx = 200 kN-s/m, cxy = 150 kN-s/m, cyx = 140 kN-s/m, cyy = 400 kN-s/m,
and for bearing B: kxx = 24 MN/m, kyy = 17 MN/m, kxy = -2.5 MN/m, kyx = 30 MN/m,
cxx = 210 kN-s/m, cxy = 160 kN-s/m, cyx = 135 kN-s/m, cyy = 380 kN-s/m.
Bearing forces:
The forces, which are transmitted to the bearings, are those, which deform the bearing lubricant film, and
do not include rotor inertia terms. In general bearing forces will lag behind the imbalance force such that
the bearing horizontal and vertical force components, at one end A of the machine, can be represented as
A bx A xx A xy A xx A xy A xx A xy A xx A xy
A by A yx A yy A yx A yy A yx A yy A yx A yy
B bx B xx B xy B xx B xy B xx B xy B xx B xy
B by B yx B yy B y
f k x k y c x c y k l k l c l c l
f k x k y c x c y k l k l c l c l
f k x k y c x c y k l k l c l c l
f k x k y c
φ θ φ θ
φ θ φ θ
φ θ φ θ
= + + + + + + +
= + + + + + + +
= + + + + + + +
= + +
� �� �
� �� �
� �� �
x B yy B yx B yy B yx B yyx c y k l k l c l c lφ θ φ θ+ + + + +� �� �
(137)
where 2, 2A xx xx B xx xxk k k k= = , etc. So equation (137) is for more general case, which can be written
in matrix form as
{ } [ ]{ } [ ]{ }b b bf c x k x= +� (138)
Z
Y
X
D B2 B1

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
58
with
{ } { } { }
[ ] [ ]
; ; ;
;
A bx
A by
b
B bx
B by
A xx A xy A xx A xy A xx A xy A xx
A yx A yy A yx A yy
b b
B xx B xy B xx B xy
B yx B yy B yx B yy
f x x
f y yf x x
f
f
c c c l c l k k k
c c c l c lc k
c c c l c l
c c c l c l
φ φθ θ
= = =
= =
�
��
�
�
A xy
A yx A yy A yx A yy
B xx B xy B xx B xy
B yx B yy B yx B yy
l k l
k k k l k l
k k k l k l
k k k l k l
For unbalance excitation with frequency ω, the bearing responses and forces can be expressed as
{ } { } { } { } { } { }j j j; j ; t t t
b bx X e x X e f F eω ω ωω= = =� (139)
On substituting equation (139) into equation (138), we get
{ } [ ] [ ]( ){ }jb b bF k c Xω= +
This can be used to evaluate the bearing forces. The amplitude of forces transmitted to the bearings are
then given by
2 2 2 2 2 2 2 2; ; ;r i r i r i r iA bx A bx A bx A by A by A by B bx B bx B bx B by B by B byF F F F F F F F F F F F+ + + += = = =
(140)
with corresponding phase angles are given by
1 1 1 1tan ; tan ; tan ; tani i i i
r r r r
A bx A by B bx B by
A bx A by B bx B by
F F F F
F F F Fε ς η λ− − − −
= = = =
(141)

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
59
1.6 Asymmetrical flexible shaft in flexible anistropic bearings with damping and cross coupling.
Figure 1.36 A flexible shaft in flexible bearings
For the present case both the shaft and bearings are flexible as shown in Figure 1.36. The analysis must
allow for different instantaneous displacements of the shaft at the disc and at bearings. The system will
behave in a similar manner to that described in previous section, except that the flexibility of shaft will
increase the overall flexibility of the support system as seen by the disc. An equivalent set of system
stiffness and damping coefficients is first evaluated, which allows for the flexibility of the shaft in
addition to that of bearings, and is used in place of the bearing coefficients in previous section analysis.
The total deflection of the is the vector sum of the deflection of the disc relative to the shaft ends plus that
of the shaft ends in the bearings. For disc we observe the displacement of geometrical center of the disc.
The deflection of the shaft ends in the bearings is related to the force transmitted through bearings by the
bearing stiffness and damping coefficients as
bx xx xy xx xy
by yx yy yx yy
f k m k n c m c n
f k m k n c m c n
= + + +
= + + +
� �
� � (142)
where m and n are instantaneous displacements of shaft ends relative to bearings in the horizontal and
vertical directions respectively, and take the form
j j; t tm Me n Neω ω= = (143)
which can be differentiated once with respect to time to give
j jj ; jt tm Me n Neω ωω ω= =� � (144)
Rigid foundation
Bearings
Shaft Disc

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
60
The bearing forces have the following form
j j; t t
bx bx by byf F e f F eω ω= = (145)
On substituting in equation of motion(59), we get
j j
j j
bx xx xy xx xy
by yx yy yx yy
F k M k N c M c N
F k M k N c M c N
ω ω
ω ω
= + + +
= + + + (146)
which can be written in matrix form as for both bearings A and B as
{ } [ ]{ }bF K V= (147)
with
{ } [ ]
( ) ( )( ) ( )
( ) ( )( ) ( )
{ }
j j 0 0
j j 0 0;
0 0 j j
0 0 j j
xx xx xy xyA AA bx
yx yx yy yyA by A A
b
B bxxx xx xy xyB B
B by
yx yx yy yyB B
T
A A B B
k c k cF
k c k cFF K
F k c k c
Fk c k c
V M N M N
ω ω
ω ω
ω ω
ω ω
+ + + + = = + + + +
=
The magnitude of the reaction forces transmitted by the bearings can also be evaluated in terms of the
forces applied to the shaft by the rotor. (Hence shaft is not assumed to be rigid and moment balance is
considered).
Fy
d Myz
l
Afby Bfby

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
61
Figure 1.37 Free body diagram of the shaft
0 ( )B A by y yzM l f F l d M= ⇒ = − −∑ or ( ) ( )1 1A by y yzf d l F l M= − − (148)
0 A B by y yzM l f dF M= ⇒ = +∑ or ( ) ( )1B by y yzf d l F l M= + (149)
Similarly forces in the horizontal direction may be written as
( ) ( )1- 1A bx x xzf d l F l M= + (150)
( ) ( )1B bx x xzf d l F l M= + (151)
Equations (148-151) can be combined in matrix form as
{ } [ ]{ }b sf A f= (152)
with
{ } { } [ ]
( )( )
1 / 0 1/ 0
0 1 / 0 1/; ;
/ 0 1/ 0
0 / 0 1/
A bx x
A by y
b s
B bx xz
B bxy yz
f F d l l
f F d l lf f A
f M d l l
f M d l l
− − − = = =
For an unbalance excitation, we have
{ } { } { } { }j j and t t
b b s sf F e f F eω ω= = (153)
On substituting equation (153) in equation (147), we get
{ } [ ]{ }b sF A F= (154)
where subscript b refers to the bearing and s refers to the shaft. In above equation bearing forces are
related to reaction forces at the shaft by the disc. Equating equation (147) and (154), we get
[K] {V} = [A]{Fs} or {V} = [K]-1 [A] {Fs} (155)
Above equation relates the shaft end deflections in terms of reaction forces and moments by the disc on
the shaft. The deflection at the location of the disc due to movement of the shaft end can be obtained as

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
62
follows. Consider the shaft to be rigid for some instant and assuming shaft end deflection in horizontal
direction be Am and Bm at ends A and B, respectively as shown in Figure 1.38.
l B
d
A x
z
Am
Bm
Figure 1.38 Rigid body movement of the shaft in z-x plane
( )1-
B A
A A B
m m d dx m d m m
l l l
− = + = +
(156)
Slope in x-z plane of the shaft will be
( )-B Am m lφ = (157)
Similarly for motion in y- direction and y-z plane, we have
( ) ( )1- A By d l m d l m= + (158)
( )-A Bn n lθ = (159)
Equations (156-159) can be combined in a matrix form as
{ } [ ]{ }1s
u B v= (160)
with
{ } { } [ ]
( )( )
1
1- / 0 / 0
0 1- / 0 /; ;
1/ 0 1/ 0
0 1/ 0 1/
A
A
s
B
B
mx d l d l
ny d l d lu v B
m l l
n l l
φθ
= = = − −
For unbalance excitation (or for free vibration analysis), shaft displacements at bearing locations and at
disc center vary sinusoidally such that

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
63
{ } { } { } { }1 1
j j and t t
s su U e v V eω ω= = (161)
On substituting in equation (160), we have
{ } [ ]{ }1s
BU V= (162)
Substituting equation (155) in above equation, we get
{ } [ ][ ] [ ]{ } [ ]{ }1
1
s sB A sU K F C F−
= = (163)
which gives the deflection of the disc due to unbalance when shaft is rigid. Above equation will give
deflection of the disc (geometrical center) that is caused by only by movement of the shaft ends (rigid
body movement ) in flexible bearings. In order to obtain the net rotor deflection under a given load, we
have to add the deflection due to deformation of the shaft to that which have been calculated in equation
(163). The deflection associated with flexure of the shaft alone has already been calculated i.e. in x-
direction & x-z direction plane and in y-direction & y-z plane, respectively
11 12
21 22
x
xy
Fx
M
α αα αφ
=
and
11 12
21 22
y
yz
Fy
M
α αα αθ
=
(164)
Equation (164) can be combined in a matrix form as
{ } [ ]{ }2s su fα= (165)
with
{ } { } [ ]2
11 12
21 22
11 12
21 22
0 0
0 0; ;
0 0
0 0
X
y
s s
xz
yz
Fx
Fyu f
M
M
α αα α
αα αφα αθ
= = =
For unbalance excitation (or for free vibration analysis), shaft reaction forces at disc location and
displacement at disc center vary sinusoidally such that
{ } { } { } { }2 2
j j and t t
s s s su U e f F eω ω= = (166)

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
64
On substituting above equations in equation (165), we get
{ } [ ]{ }2s sU Fα= (167)
which is the deflection of disc due to shaft flexure of the shaft alone without considering bearing
flexibility. The net deflection of the rotor that caused by deflection of the bearings plus that due to flexure
of the shaft is then given by
{ } { } { }1 2s sU U U= + [ ] [ ]( ){ } [ ]{ }s sC F D Fα= + = (168)
The above equation describes the displacement of the shaft at the disc under the action of sinusoidal
forces and moments applied at the disc (identical to the influence coefficient matrix). Equation (168) can
be written as
{ } [ ] { } [ ]{ }1
sF D U E U−
= = (169)
EOM of the disc can be written in the x-direction and on the x-z plane, as
2 cos xme t F mxω ω − = �� and - xz dM I φ= �� (170)
Similarly the EOM in the y-direction and the y-z plane
2 sin xme t F myω ω − = �� and - yz dM I θ= �� (171)
x meω2cosωt y meω2
sinωt
Mxz Myz
φ
θ
x Fx y Fy
z z
(a) (b)

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
65
Figure 1.39 Free body diagram of the disc
Equations of motion of the disc can be written in matrix form as
[ ]{ } { } { }sM u f f+ =�� (172)
with
[ ] { } { } { } { }
2
2
j j
0 0 0
0 0 0 j; ; ;
0 0 0 0
0 0 0 0
x
y t t
s
xzd
yzd
Fm x me
Fm y meM u f f e F e
MI
MI
ω ω
ωω
φθ
− = = = = =
Equations of motion take the form
[ ]{ } { } { }2
sM U F Fω− + = (173)
From equation (169) above equation takes the form
[ ]{ } [ ]{ } { }2 M U E U Fω− + = (174)
which gives
{ } [ ] [ ]( ) { }1
2U M E Fω−
= − + (175)
where [ ] [ ]( ) 12 M Eω
−− + is the equivalent bearing stiffness & damping coefficients. Once response of
the rotor has been obtained the loading applied to the shaft by rotor can be obtained by equation (168)
{ } [ ]{ }( )sF E U= , which is substituted in equation (154) { }-1. . { } [ ] [ ]{ }si e V K A F= to get shaft ends
deflections {V} at each bearings, which is substituted in equation (147) { }( )[ ]{ }bF K V= to get bearing
forces. (or {Fb] = [A]{Fs} can be used directly to obtain bearing forces) equation (154). The
displacements and forces have the complex form; the amplitude and phase information can be extracted
from the real and imaginary parts. Amplitudes will be the modulus of complex numbers and phase angles
of all these parameters can be evaluated by calculating arctangent of the ratio of the imaginary to real
components as given by equations (140) and (141).

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
66
Exercise 1.6. Find the critical speeds of the rotor bearing system shown in Figure E1.6. The shaft is made
of steel with Young’s modulus E = 2.1 (10)11 N/m
2 and uniform diameter d = 10 mm. Treat the shaft as
flexible and massless. The mass of the disc is: md = 1 kg with negligible diamentral mass moment of
inertia. Bearings B1 and B2 are identical bearings and having the following properties: kyy = 1.1 kN/m, kzz
= 1.8 kN/m, kyz = 0.2 kN/m and kzy = 0.1 kN/m. The various shaft lengths are as follows: B1D = 75 mm,
and DB2 = 50 mm.
Figure E1.6 A flexible rotor mounted on a flexible bearings
Exercise Problem 1.7. Obtain the critical speeds for transverse vibrations of rotor-bearing system as
shown in Figure E1.7. Consider shaft as flexible and whole mass of the shaft is assumed to be
concentrated at its mid-span. The shaft is of 1 m of span and the diameter is 0.05 m with the mass density
of 7800 kg/m3. The shaft is supported at ends by flexible bearings. Consider the motion in both the
vertical and horizontal planes. Take the following bearing properties:
For bearing A: kxx = 20 MN/m, kyy = 15 MN/m, kxy = -1.5 MN/m, kyx = 25 MN/m,
cxx = 200 kN-s/m, cxy = 150 kN-s/m, cyx = 140 kN-s/m, cyy = 400 kN-s/m,
and for bearing B: kxx = 24 MN/m, kyy = 17 MN/m, kxy = -2.5 MN/m, kyx = 30 MN/m,
cxx = 210 kN-s/m, cxy = 160 kN-s/m, cyx = 135 kN-s/m, cyy = 380 kN-s/m.
shaft
bearings
A B
Figure E1.7
X
Z
Y
D B2 B1

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
67
1.7 Effects of flexible foundations
In some machines bearings themselves may be mounted on flexible foundations (Figure 1.40), which may
in turn influence the motion of disc masses. The net displacement of the disc is given by the vector sum of
(i) disc displacement relative to the shaft ends, plus (ii) that of the shaft ends relative to the bearing, plus
(iii) that of bearing relative to space. The theoretical analysis of the disc, the shaft and the bearing
response and that of the force transmissibility of such a system, can be carried out in a similar manner to
that described in the previous section.
Figure 1.40 A flexible rotor-bearing-foundation system
The relationship between the force transmitted through bearings and displacements of the shaft ends is
governed by the bearing stiffness & damping coefficients and is given by (from equation 147 of previous
section)
{ } [ ]{ }bf K v= or { } [ ]{ }bF K V= (176)
where {v} is the shaft end displacement relative to the bearing. For obtaining a relationship between
displacements of bearings on their foundations and the force transmitted through bearings.
Bearings
Foundations
Shaft Disc

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
68
Force being transmitted Bearing
to bearing through shaft
kfx
fbx
cfx
mb
cfy kfy Bearing mounting
system
Figure 1.41 A bearing mounted on foundation
The bearing will respond in the horizontal direction for an external force fbx by the following equation
bx fx fx bf k a c a m a− − =� �� (177)
where a is the horizontal displacement of the bearing, mb is the bearing mass of one bearing and kfx, cfx,
kfy, cfy are foundation stiffness & damping coefficients. Similarly the response of the bearing in the
vertical direction to a force fby is
by fy fy bf k b c b m b− − =� �� (178)
where b is the bearing vertical displacement. The displacement of the bearing will take the form
j j and t ta Ae b Beω ω= = (179)
Substituting in equations (179), equations of motion (177) and (178) can be combined in the matrix form
as (for bearing A)
[ ]{ } { }A A A bD e F= (180)
with
[ ] { } { }20 00
j ; and 0 00
x x x
y y y
f f bb
A A A b
f f bb A A
k c Fm AD e F
k c Fm Bω ω
= − + = =

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
69
For both bearings equations of the form as equation (180), can be combined as
{ }{ }
[ ][ ]
{ }{ }
0
0
A b A A
B b B B
F D e
F D e
=
or { } [ ]{ }bF D E= (181)
which gives relative displacements between the bearing and foundation, as
{ } [ ] { }1
bE D F−
= (182)
The total displacement of the shaft ends under the action of an applied force {Fb} is given by summation
of individual displacements {V} and {E} i.e.
{ } { } [ ] { } [ ]{ }1 1{ } [ ] b bW V E K D F K F− − ′= + = + = (183)
where [ ]K ′ is a system equivalent stiffness matrix describing the overall shaft support characteristics and
allows for the flexibilities of both the bearings and their foundations. The study of the disc motion may
now proceed in the same manner as indicated in previous section except the equivalent stiffness matrix
[ ]K ′ should be substituted for [ ]K . Once the disc displacement vector {U} is known, it is possible to
substitute back and obtain {Fs}, {V} and {Fb} as in the previous section. The force transmitted to the
foundation are given as
fx fx fxf k a c a= + � and fy fy fyf k b c b= + � (184)
For unbalance excitation or free vibration analysis, we have
j j and t t
fx fx fy fyf F e f F eω ω= = (185)
On substituting above equations into equation (184), we get
0 0
0 0
x x x
y x x
f f f
f f f
F c c Aj
F c c Bω
= +

Dr R Tiwari, Associate Professor, Dept. of Mechanical Engg., IIT Guwahati, ([email protected])
70
The force transmitted through the foundation will not be same as force transmitted through the
bearings, because bearing mass (i.e. the inertia force) will absorb some force towards its
acceleration. If bearing mass is not there then bearing and foundation will transmit same amount
of force , however, may be with some phase lag. Amplitude and phase of the force transmitted
through the foundation can be obtained from 1 2 1, , fx fx fyF F F and
2fyF as usual.

![NATURAL SCIENCES D568/12 ADMISSIONS ASSESSMENT 40 … · Ω, 2 Ω, 4 Ω, 8 Ω, 16 Ω, 32 Ω, 64 Ω, … connected in parallel with the cell. ... [2 marks] Answer: ... is used as the](https://static.fdocuments.in/doc/165x107/5f2363f7b03d7e4ce06bc15b/natural-sciences-d56812-admissions-assessment-40-2-4-8-16-32.jpg)